PSO-Tuned PID Controller for a Nonlinear Gantry Crane System.
Teks penuh
Gambar


Dokumen terkait
Therefore, the design of this system consists of the PID controller and the transfer function of the DC motor that obtained from the real experiment (ELECTRO-MECHANICAL
The Particles Swarm Optimization (PSO) is used for tuning the PID+PD controller parameter in term of Overshoot (OS), Settling Time (Ts) and Steady-State Error (SSE) via
The main objective of this research project is to design PID and NPID controller that is able to control the tracking performance of the system which is XY table ball
Fig. 2 shows a Simulink block diagram developed based on dynamic equations in Eq. Bang-bang input voltage signal is applied as an input voltage and it has been set as ±5 Volts.
Linearization. Read up and study related technical knowledge. ii) Study and learn about mathematical equation that involve in this project. iii) Study and learn about Simulink in
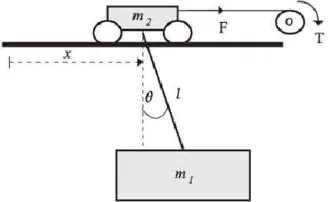
Dynamic feedback swing control is a method used to drive a system of gantry crane uncertain mass from initial position to a target position as quickly, accurately and safely as
Gantry crane system Modified sine cosine optimization algorithm PIDC controller Standard sine cosine optimization algorithm Test functions.. This is an open access article
This study presents the design of proportional- integral-derivative PID controller for a quarter-car active vehicle suspension system AVSS using evo- lutionary algorithms EA such as the
