PENDEKATAN PROGRAM TUJUAN GANDA UNTUK
MENYELESAIKAN PERMASALAHAN
FUZZY TRANSPORTASI
SKRIPSI
RISTYA PUSPITASARI
070803013
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
MEDAN
2011
PENDEKATAN PROGRAM TUJUAN GANDA UNTUK MENYELESAIKAN PERMASALAHAN FUZZY TRANSPORTASI
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar Sarjana Sains
RISTYA PUSPITASARI 070803013
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
MEDAN 2011
PERSETUJUAN
Judul : PENDEKATAN PROGRAM TUJUAN GANDA UNTUK MENYELESAIKAN PERMASALAHAN FUZZY TRANSPORTASI
Kategori : SKRIPSI
Nama : RISTYA PUSPITASARI
Nomor Induk Mahasiswa : 070803013
Program Studi : SARJANA (S1) MATEMATIKA
Departemen : MATEMATIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN
ALAM (FMIPA) UNIVERSITAS SUMATERA UTARA
Diluluskan di Medan, Juni 20011 Komisi Pembimbing :
Pembimbing 2 Pembimbing 1
Syahril Efendi, S.Si, M.I.T Drs. Suwarno Ariswoyo, M.Si NIP. 19671110 199602 1 0001 NIP. 19502103 198003 1 001
Diketahui/Disetujui oleh
Departemen Matematika FMIPA USU Ketua,
Prof.Drs.Tulus, M.Si
NIP. 19620901 198803 1 002
PERNYATAAN
PENDEKATAN PROGRAM TUJUAN GANDA UNTUK MENYELESAIKAN PERMASALAHAN FUZZY TRANSPORTASI
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan masing-masing disebutkan sumbernya.
Medan, Juni 2011
RISTYA PUSPITASARI 070803013
PENGHARGAAN
Puji dan syukur penulis panjatkan kepada Tuhan Yang Maha Esa, karena dengan limpahan karunianya penulis dapat menyelesaikan skripsi ini dengan waktu yang telah ditetapkan.
Skripsi ini disusun untuk melengkapi salah satu syarat mencapai gelar sarjana Matematika di Fakultas Matematika dan Imu Pengetahuan Alam, Universitas Sumatera Utara, dengan judul “Pendekatan Program Tujuan Ganda untuk Menyelesaikan Permasalahan Fuzzy Transportasi”.
Dalam kesempatan ini penulis ingin mengucapkan terima kasih yang sebesar-besarnya kepada:
1. Ayahanda Nur Jauhari, Ibunda Rochmiyati (Almarhum) dan Kakak tercinta Ratih Pramestari yang telah memberikan cinta kasih yang tak ternilai, doa yang tulus serta pengorbanan baik secara materi ataupun nonmateri.
2. Bapak Drs. Suwarno Ariswoyo, M.Si selaku pembimbing I dan bapak Syahril Efendi, S.Si, M.IT selaku pembimbing II yang telah memberikan banyak bimbingan dan kepercayaan kepada penulis untuk menyempurnakan skripsi ini.
5. Bapak dekan serta pembantu Dekan FMIPA USU.
6. Seluruh Dosen yang telah mendidik selama masa perkuliahan dan staf pegawai yang telah membantu kemudahan administrasi.
7. Seluruh rekan-rekan matematika stambuk 2007 yang tidak terlupakan dukungan dan bantuannya.
8. Semua pihak yang tidak dapat penulis sebutkan satu persatu.
Penulis menyadari masih banyak kekurangan dalam penulisan skripsi ini, oleh karena itu dengan segala kerendahan hati, penulis meminta saran dan kritik yang membangun demi kesempurnaan skripsi ini.
Akhir kata penulis mengucapkan terima kasih atas perhatiannya, semoga skripsi ini bisa bermanfaat untuk kita semua.
ABSTRAK
Tulisan ini menyajikan permasalahan transportasi di mana nilai persediaan dan permintaannya merupakan bilangan fuzzy dengan fungsi keanggotaan trapezoidal dan fungsi tujuannya diasumsikan lebih dari satu. Solusi Optimalnya diperoleh dengan penyelesaikan permasalahan program linear dengan kendala fuzzy dan crisp serta menerapkan teknik fuzzy programming.
MULTI-OBJECTIVE GOAL PROGRAMMING APPROACH FOR A FUZZY TRANSPORTATION PROBLEM
ABSTRACT
In this paper presented transportation problem which supplies and demands are trapezoidal fuzzy number and the objective function assumed multiple objective. The optimal solution of the problem is founded by solving the linear programming problem with fuzzy and crisp constraints and applying fuzzy programming technique.
DAFTAR ISI
1.2 Perumusan Masalah 3
1.3 Batasan Masalah 3
1.4 Tinjauan Pustaka 3
1.5 Tujuan Penelitian 5
1.6 Kontribusi Penelitian 5
1.7 Metode Penelitian 6
Bab 2 Landasan Teori 7
2.1 Program Tujuan Ganda 7
2.1.1 Konsep Dasar Program Tujuan Ganda 7
2.1.2 Unsur-Unsur Program Tujuan Ganda 9
2.1.3 Asumsi Model Program Tujuan Ganda 11
2.1.4 Perumusan Masalah Program Tujuan Ganda 12
2.2 Transportasi 15
2.3 Himpunan Fuzzy 16
2.3.1 Fungsi Keanggotaan 18
2.3.2 Permasalahan Fuzzy transportasi 19
2.4 Pengenalan Software QM for Windows 20
Bab 3 Pembahasan 24
3.1 Pendekatan Program Tujuan Ganda 24
3.2 Solusi Permasalahan Fuzzy Transportasi 27
3.3 Contoh Kasus Fuzzy Transportasi 29
3.3.1 Kasus dengan Tujuan Diskrit 29
3.3.2 Kasu dengan Tujuan Kontinu 32
DAFTAR TABEL
Halaman
Tabel 2.1 Jenis-Jenis Kendala Tujuan 10
DAFTAR GAMBAR
Halaman
Gambar 2.1 Himpunan Fuzzy Variabel Umur 17
Gambar 2.2 Himpunan Fuzzy dengan Fungsi Keanggotaan Segitiga 18 Gambar 2.3 Himpunan Fuzzy dengan Fungsi Keanggotaan Trapezoidal 19 Gambar 2.4 Tampilan Sementara (splash) dari Program QM for Windows 21 Gambar 2.5 Tampilan Awal dari Program QM for Windows 21 Gambar 2.6 Pilihan Modul yang Tersedia pada Program QM for Windows 22 Gambar 2.7 Baris Menu (menu bar) Sebelum Dipilih Modul Tertentu 22 Gambar 2.8 Baris Menu (menu bar) Setelah Dipilih Modul Tertentu 22 Gambar 2.9 Baris Tool (tool bar) Sebelum Dipilih Modul Tertentu 22 Gambar 2.10 Baris Menu (tool bar) Setelah Dipilih Modul Tertentu 22
Gambar 2.11 Ruang Instruksi 23
Gambar 2.12 Baris Utilitas (utility bar) 23
ABSTRAK
Tulisan ini menyajikan permasalahan transportasi di mana nilai persediaan dan permintaannya merupakan bilangan fuzzy dengan fungsi keanggotaan trapezoidal dan fungsi tujuannya diasumsikan lebih dari satu. Solusi Optimalnya diperoleh dengan penyelesaikan permasalahan program linear dengan kendala fuzzy dan crisp serta menerapkan teknik fuzzy programming.
MULTI-OBJECTIVE GOAL PROGRAMMING APPROACH FOR A FUZZY TRANSPORTATION PROBLEM
ABSTRACT
In this paper presented transportation problem which supplies and demands are trapezoidal fuzzy number and the objective function assumed multiple objective. The optimal solution of the problem is founded by solving the linear programming problem with fuzzy and crisp constraints and applying fuzzy programming technique.
BAB 1 PENDAHULUAN
1.1 Latar Belakang
Permasalahan transportasi merupakan permasalahan yang sering terjadi dalam kehidupan sehari-hari. Transportasi merupakan bentuk khusus dari program linear yang digunakan untuk memecahkan masalah yang berhubungan dengan transportasi (pengangkutan) untuk meminimalkan biaya, jarak tempuh dan sebagainya sehingga dapat memaksimalkan laba/keuntungan yang diperoleh. Metode transportasi merupakan suatu metode yang digunakan untuk mengatur distribusi dari beberapa sumber ke tempat-tempat yang membutuhkan barang. Pendistribusian barang harus diatur sedemikian rupa, karena ada perbedaan jarak atau biaya dari sumber-sumber yang ada dan tempat-tempat yang yang membutuhkan barang. Tujuan dari masalah transportasi adalah untuk menentukan jumlah yang optimal dari barang yang akan diangkut dari berbagai sumber ke berbagai tujuan sehingga biaya transportasi total minimum.
Jumlah yang tersedia di sumber-sumber dapat memenuhi jumlah yang diperlukan pada tujuan sesuai dengan kebutuhan/permintaannya. Dalam transportasi terdapat variabel yang perlu diminimalkan, variabel ini dapat berupa biaya, waktu atau keamanan pengirimannya. Dalam prakteknya parameternya dari transportasi yang berupa nilai permintaan dan persediaan tidak selalu dapat diketahui dengan pasti dan tidak selalu stabil. Ketidakpastian ini meliputi kurangnya informasi yang tepat dan sebagainya. Sebuah cara yang sering digunakan untuk menyatakan ketidaktepatan ini adalah bilangan fuzzy. Bilangan fuzzy dapat disajikan dalam bentuk trapezoidal.
Mengambil keputusan adalah bagian dari kehidupan sehari-hari. Nyatanya, permasalahan yang terjadi sering terjadi perbedaan tujuan, kurangnya informasi
membuat hampir tidak mungkin untuk pengambilan keputusan membuat model matematika yang dapat dipercaya. Agar permasalahan ini dapat diatasi, pengambil keputusan mencoba membuat kumpulan tujuan-tujuan untuk mendapatkan solusi yang dapat diterima pengambil keputusan akan meminimalkan deviasi-deviasi antara kepentingan dan nilai aspirasi dari setiap tujuan. Pada beberapa keadaan, banyak kejadian di mana pengambil keputusan akan membuat keputusan dari suatu permasalahan, dengan satu tujuan yang dapat mencapai tingat aspirasinya. Tetapi banyak pula kejadian yang tujuannya tidak dapat dicapai dengan satu tujuan, kejadian ini akan diselesaikan dengan program tujuan ganda (multi-objective goal programming).
Chanas dan Kuchta tahun 1998 merancang algoritma untuk memecahkan masalah integer fuzzy transportasi dengan permintaan dan persediaan fuzzy dan memaksimalkan kepuasan bersama tujuan atau sasaran fuzzy dan kendala. Pada penyelesaian fuzzy transportasi secara biasa (ditransformasikan ke dalam permasalahan transportasi biasa dan ditambah dengan variabel dummy) permasalahannya diselesaikan dengan menduga nilai derajat kepuasannya, kemudian di selesaikan. Nilai optimal yang diperoleh harus masuk ke dalam fungsi tujuan, jika tidak, harus diselesaikan lagi dengan nilai derajat kepuasan yang lain.
Program tujuan ganda bertujuan untuk meminimumkan jarak antara atau deviasi terhadap tujuan atau sasaran yang telah ditetapkan. Digunakan pendekatan program tujuan ganda untuk menyelesaikan permasalahan fuzzy transportasi, karena dalam program tujuan ganda, tujuan atau sasaran yang ditentukan masuk ke dalam kendala transportasi, sehingga hanya meminimalkan deviasi (simpangan) nya dan mengetahui apakah tujuan atau sasaran yang ingin dicapai dalam fuzzy transportasi, dan nilai derajat kepuasan dapat diketahui. Dalam skripsi ini akan dilakukan pendekatan program tujuan ganda untuk menyelesaikan permasalahan fuzzy transportasi.
Berdasarkan uraian di atas penulis mencoba menuangkannya yang hasilnya akan disajikan dalam bentuk karya ilmiah yang berjudul “Pendekatan Program Tujuan Ganda untuk Menyelesaikan Permasalahan Fuzzy Transportasi ”.
1.2 Perumusan Masalah
Dalam skripsi ini akan dibahas bagaimana menyelesaikan permasalahan fuzzy transportasi dengan melakukan pendekatan program tujuan ganda.
1.3 Batasan Masalah
Dalam penulisan ini, penulis hanya membatasi fuzzy transportasi dengan setiap bilangan fuzzynya mempunyai fungsi keanggotaan trapezoidal yang akan diselesaikan dangan pendekatan program tujuan ganda.
1.4 Tinjauan Pustaka
Transportasi adalah variasi khusus dari program linear yang digunakan untuk mengatur distribusi dari sumber-sumber yang menyediakan barang yang sama, ke tempat-tempat yang membutuhkan barang secara optimal. (Pangestu et al, 1984). Tranportasi digunakan untuk mencari solusi optimal dari masalah distribusi barang. Tahun 1939, L.V. Kantorovitch mempelajari berbagai masalah yang berhubungan dengan transportasi. Kemudian, tahun 1941 F.L. Hitchcock merumuskan model matematika dari masalah transportasi yang kini menjadi model baku yang sering disebut model Hitchcock. T.C. Koopmans tahun 1949 dan G.B. Dantzig tahun 1951 juga turut mengembangkan metode transportasi.
Charnes dan Cooper (1961) memperkenalkan program tujuan ganda sebagai pendekatan untuk menyelesaikan masalah yang tidak dapat diselesaikan dengan program linear yang disebabkan oleh tujuan yang bertentangan. Kemudian Ijiri (1965) dan Jaaskelainen (1969) melanjutkan dan melengkapinya sehingga dapat dipakai secara operasional.
Program Tujuan Ganda merupakan modifikasi atau variasi khusus dari program linear yang telah dikenal terlebih dahulu. Program Tujuan Ganda pertama
kali digunakan oleh Charnes dan Cooper pada tahun 1961. Charnes dan Cooper melakukan pendekatan program tujuan agar memperoleh solusi yang tidak bisa dilakukan dengan Program Linear. Cara memformulasi Program Tujuan Ganda hampir sama dengan linear programming. Analisis Program Tujuan Ganda bertujuan untuk meminimumkan jarak antara atau deviasi terhadap tujuan atau sasaran yang telah ditetapkan dan usaha yang dapat ditempuh untuk mencapai tujuan yang memuaskan harus sesuai dengan syarat-ikatan yang ada, yang membatasinya berupa sumber daya yang tersedia, teknologi yang ada, kendala tujuan, dan sebagainya. (Nasendi et al, 2005).
Model umum goal programming berdasarkan Nasendi dan Affendi (2005):
= target atau tujuan
= koefisien fungsi kendala tujuan = koefisien fungsi kendala biasa = jumlah sumber daya yang tersedia.
Pada tahun 1965, Lotfi Asker Zadeh mengenalkan teori fuzzy. Teori ini menyebutkan bahwa sistem analisis matematika tradisional yang dikenak sampai saat ini bersifat terlalu eksak sehingga tidah dapat berfungsi dalam banyak masalah dunia nyata yang sering kali amat kompleks.
Sejak tahun 1985, terjadi perkembangan yang sangat pesat pada logika fuzzy tersebut, terutama dalam hubungannya dengan penyelesaian masalah kendali, terutama yang bersifat nonlinear dan situasi-situasi yang sangat kompleks.
1.5 Tujuan Penelitian
Tujuan dari penelitian ini adalah menunjukkan bahwa program tujuan ganda dapat digunakan untuk menyelesaikan fuzzy transportasi dengan fungsi keanggotaan trapezoidal.
1.6 Kontribusi Penelitian
Dengan adanya tulisan ini sangat bermanfaat dalam memecahkan permasalahan fuzzy transportasi dengan menggunakan pendekatan program tujuan ganda. Selain itu dapat digunakan sebagai tambahan informasi dan referensi bacaan untuk mahasiswa matematika, terlebih bagi mahasiswa yang hendak melakukan penelitian serupa.
1.7Metode Penelitian
Penelitian ini adalah penelitian literatur yang disusun dengan langkah-langkah sebagai berikut:
1. Menjelaskan tentang fuzzy transportasi dan program tujuan ganda.
2. Mengambil sebuah contoh kasus fuzzy transportasi. 3. Membedakannya menjadi masalah diskrit atau kontinu.
4. Mengubahnya menjadi persamaan fuzzy transportasi menjadi program tujuan ganda.
5. Melinearkan persamaan program tujuan gandamenjadi dua persamaan linear. 6. Menyelesaikannya untuk memperoleh solusi optimal dengan QM.
7. Mencari nilai derajat kepuasan maksimal.
BAB 2
LANDASAN TEORI
2.1 Program tujuan ganda
Program tujuan ganda merupakan variasi khusus dari program linear. Analisisnya bertujuan untuk meminimumkan jarak antara atau deviasi deviasi terhadap tujuan atau sasaran yang telah ditetapkan dengan usaha yang dapat ditempuh untuk mencapai tujuan secara memuaskan sesuai dengan syarat ikatan yang ada, yang membatasinya berupa sumber daya yang tersedia, teknologi yang ada, kendala tujuan dan sebagainya. (Nasendi et al, 2005).
Dalam keadaan di mana seorang pengambil keputusan dihadapkan kepada suatu persoalan yang mengandung beberapa tujuan, sehingga program linear tak dapat membantunya untuk memberikan pertimbagan secara rasional, karena program linear terbatas pada satu tujuan (tujuan tunggal), maka untuk menyelesaikannya diperlukan program tujuan ganda. Program tujuan ganda berusaha untuk meminimumkan deviasi berbagai tujuan, sasaran atau target yang telah ditetapkan dan program tujuan ganda juga akan mencoba untuk memuaskan atau memenuhi target yang telah ditentukan menurut skala prioritas masing-masing.
2.1.1 Konsep Dasar Program tujuan ganda
Agar memahami dengan baik bidang yang dipelajari, pembaca selalu harus mengerti istilah-istilah dan lambing-lambang khusus yang digunakan. Berikut ini adalah definisi dari beberapa istilah dan lambing yang biasa digunakan pada program tujuan ganda.
Decision variables: seperangkat variable yang tak diketahui (dalam model program tujuan ganda dilambangkan dengan , di mana j = 1,2,…,n) yang akan dicari nilainya. (variable keputusan).
Righthand side values (RHS): nilai-nilai yang biasanya menunjukkan ketersediaan sumberdaya (dilambangkan dengan ) yang akan ditentukan kekurangan atau kelebihan penggunaannya. (nilai sisi kanan)
Goal: keinginan untuk meminimalkan angka penyimpangan dari suatu nilai RHS pada suatu kendala tujuan tertentu. (tujuan).
Goal Constrain: yaitu suatu tujuan yang diekspresikan dalam persamaan matematik dengan memasukkan variable simpangan. (kendala tujuan)
Preemtive Priority Factor: suatu sistem urutan (yang dilambangkan dengan � , di mana = 1,2,…,� dan K menunjukkan banyaknya tujuan dalam model) yang memungkinkan tujuan-tujuan disusun secara ordinal dalam model program tujuan ganda. Sistem urutan menempatkan tujuan-tujuan dalam susunan dengan hubungan seperti berikut:
�1 >�2 >>> ��
�1 merupakan tujuan yang paling penting.
�2 merupakan tujuan yang kurang penting dan seterusnya.
Deviational variables: variable-variabel yang menunjukkan kemungkinan penyimpangan negatif dari suatu nilai RHS kendala tujuan (dalam model program tujuan ganda dilambangkan dengan −, di mana = 1,2,…, dan m adalah banyaknya kendala tujuan dalam model) atai penyimpangan positif dari suatu nilai RHS (dilambangkan dengan +. Variabel-variabel ini serupa dengan slack variabel dalam program linear. (variabel simpangan).
Differential weight: timbangan matematika yang diekspresikan dengan angka kardinal (dilambangkan dengan di mana = 1,2,…,�; = 1,2,…, ) dan digunakan untuk membedakan variabel simpangan i di dalam suatu tingkat prioritas k. (Bobot).
Technological coefficient: nilai-nilai numerik (dilambangkan dengan ) yang menunjukkan penggunaan nilai per unit untuk menciptakan . (koefisien teknologi).
Program tujuan ganda biasanya digunakan untuk menyelesaikan permasalahan linear dengan memasukkan berbagai tujuan yang dinyatakan sebagai goal dalam
formulasi modelnya. Setiap tujuan direpresentasikan secara numerik, Tujuan inilah yang ingin dicapai. Tetapi, berbagai tujuan tidak selalu dapat dicapai bersamaan , penyimpangan (deviasi) dari tujuan dapat terjadi. Maka dalam formulasi program tujuan ganda, tujuan dalam numerik untuk setiap tujuan harus ditetapkan terlebih dahulu. Kemudian solusi yang ingin dicapai adalah meminimumkan jumlah penyimpangan tujuan-tujuan ini terhadap masing-masing tujuannya.
Perbedaan utama antara program linear dan program tujuan ganda terletak pada struktur fungsi tujuannya. Dalam linear programming funsi tujuannya hanya mengandung satu tujuan, sedangkan program tujuan ganda satu fungsi tujuan atau beberapa fungsi tujuan digabungkan dalam sebuah fungsi tujuan. Hal ini dapat dilakukan dengan mengekspresikan tujuan itu dalam bentuk sebuah kendala, memasukkan suatu variabel simpangan dalam kendala itu, untuk menggambarkan seberapa jauh tujuan itu dapat dicapai, dan menggabungkan variabel simpangan dalam fungsi tujuan. Tujuan dalam program linear dapat maksimalkan atau minimalkan, sedangkan tujuan dalam program tujuan ganda adalah meminimalkan penyimpangan-penyimpangan dari tujuan-tujuan tertentu. Berarti semua masalah program tujuan ganda adalah masalah meminimalkan.
2.1.2 Unsur-Unsur Program tujuan ganda
Setiap program tujuan ganda paling sedikit terdiri dari tiga komponen, yaitu:
1. Fungsi Tujuan
Fungsi tujuan dalam program tujuan ganda umumnya adalah masalah minimisasi karena dalam program tujuan ganda terdapat variabel deviasi di dalam fungsi tujuan yang harus diminimumkan. Hal ini merupakan konsekuensi logis dari adanya vaiabel deviasi dalam fungsi kendala tujuan. Sehingga fungsi tujuan dalam program tujuan ganda adalah minimisasi penyimpangan atau minimisasi variabel deviasi.
Fungsi tujuan di atas gigunakan apabila variabel deviasi dalam suatu permasalahan tidak dibedakan menurut prioritas atau bobot.
b. Minimumkan
Fungsi tujuan di atas digunakan apabila urutan dari tujuan diperlukan tetapi variabel deviasi setiap tingkat prioritas dari tujuan memiliki kepentingan yang sama.
Fungsi tujuan di atas digunakan apabila tujuan-tujuan diurutkan berdasarkan prioritas dan dibedakan dengan diberikan bobot yang berlainan W . ki
2. Kendala Tujuan
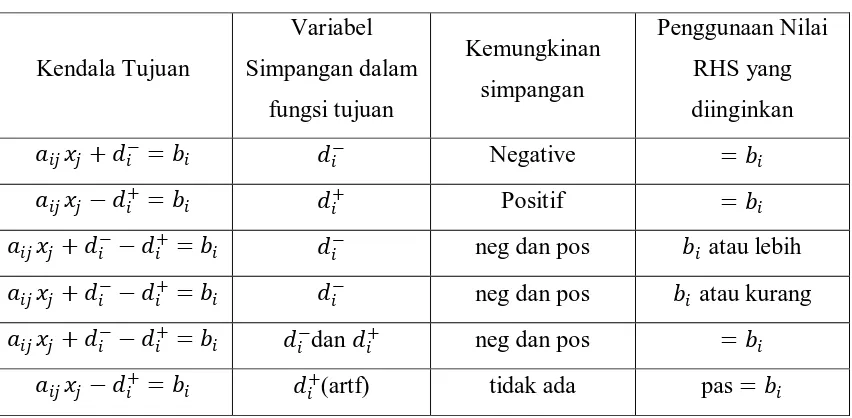
Ada enam jenis kendala tujuan yang berlainan. Maksud setiap jenis kendala itu ditentukan oleh hubungannya dengan fungsi tujuan. Setiap kendala tujuan harus memiliki satu atau dua variabel simpangan yang ditempatkan pada fungsi tujuan. Dimungkinkan adanya kendala-kendala yang tidak memiliki variabel simpangan. Kendala-kendala ini sama seperti kendala persamaan linear.
Tabel 2.1. Jenis-jenis kendala tujuan
Kendala Tujuan
Sumber: Mulyono, Sri. 1991. Operation Research. Lembaga Penerbit Fakultas ekonomi Universitas Indonesia, Jakarta.
3. Kendala Non-Negatif
Seperti dalam program linear, variabel-variabel model program tujuan ganda biasanya bernilai lebih besar atau sama dengan nol. Semua model program tujuan ganda terdiri dari variabel simpangan dan variabel keputusan, sehingga pernyataan non negatif dilambangkan sebagai:
, −, + 0
4. Kendala Stuktural
Selain tiga komponen, program tujuan ganda terkadang juga mengandung kendala struktural. Kendala struktural yaitu kendala-kendala lingkungan yang tidak berhubungan langsung dengan tujuan-tujuan dari masalah yang dipelajari. Variabel simpangan tidak dimasukkan dalam kendala ini, karena itu kendala ini tidak diikutsertakan dalam fungsi tujuan.
2.1.3 Asumsi Model Program Tujuan Ganda
Sebelum merumuskan model, perlu diketahui bahwa model program tujuan gandamemerlukan sejumlah asumsi. Jika dalam membuat modeldari suatu masalah tentu asumsi-asumsi tidak dapat dipenuhi, maka program tujuan ganda bukan merupakan model yang cocok untuk masalah yang sedang dipelajari. Jadi asumsi model membatasi penerapan program tujuan ganda.
1. Addivitas dan linearitas
Diasumsikan bahwa proporsi penggunaan yang ditentukan oleh harus tetap benar tanpa memperhatikan nilai solusi yang dihasilkan. Artinya, LHS dari kendala tuuan harus sama dengan RHS. Dalam kehidupan sehari-hari, hubungan sinergistik dapat menyebabkan penyimpangan asumsi ini. Suatu contoh adalah ketika seseorang ditempatkan dalam suatu lingkungan yang kompetitif. Prosedur model lain, seperti program stokastik, cocok untuk memodelkan jenis persoalan ini.
2. Divisibilitas
Diasumsikan bahwa nilai-nilai , −, + yang dihasilkan dapat dipecah. Artinya, kita dapat menyelesaikan jumlah pecahan nilai dan menggunakan
jumlah pecah sumber daya dalam situasi itu. Asumsi ini tidak membatasi penggunaan model program tujuan ganda, karena prosedur solusi program tujuan yang lain, yaitu program tujuan integer, dapat mencari solusi integer. 3. Terbatas
Diassumsikan bahwa nilai , −, + yang dihasilkan terbatas. Artinya, kita tidak dapat memiliki nilai variabel keputusan, sumber daya, atau penyimpangan tujuan yang tak terbatas. Segalanya dalam dunia ini terbatas. 4. Kepastian dan periode waktu statis
Diasumsikan bahwa parameter model program tujuan ganda seperti
, ,��, diketahui dengan pasti dan mereka akan tetap statis selama periode perencanaan di mana hasil model digunakan.
2.1.4 Perumusan Masalah Program Tujuan
Agar mengerti bagaimana merumuskan suatu masalah program tujuan ganda, perlu diketahui prosedur perumusan. Kemudian diterapkan prosedur itu pada beberapa situasi persoalan yang berlainan.
1. Prosedur Perumusan
Perumusan suatu masalah program tujuan ganda sangat mirip deengan perumusan sebuah masalah program linear. Penjelasan variabel keputusan , koefisien , dan nilai sisi kanan , diperlukan baik pada program linear maupun program tujuan ganda. Langkah-langkah perumusan program tujuan ganda meliputi beberapa tahap.
a. Tentukan variabel keputusan
Kuncinya adalah menyatakan dengan jelas variabel keputusan yang tak diketahui. Makin tepat definisi akan makin mudah pekerjaan pemodelan yang lain.
b. Nyatakan sistem kendala
Kuncinya adalah menentukan nilai-nilai sisi kanan dan kemudian menentukan koefisien teknologi yang cocok dan variabel keputusan yang diikut sertakan dalam kendala. Juga perhatikan jenis penyimpangan yang diperbolehkan dari
nilai RHS. Jika penyimpangan diperbolehkan dua arah, tempatkan hanya satu variabel simpangan yang tepat pada kendala yang bersangkutan.
c. Tentukan prioritas utama
Kuncinya adalah membuat urutan tujuan-tujuan. Biasanya urutan tujuan merupakan pernyataan preferensi individu. Jika persoalannya tidak memiliki urutan tujuan, lewati langkah ini dan kemudian kelangkah berikutnya.
d. Menentukan bobot
Disini kuncinya adalah membuat urutan didalam suatu tujuan tertentu, jika tidak diperlukan lewati langkah ini.
e. Nyatakan fungsi tujuan
Pilih variabel simpangan yang benar untuk dimasukkan dalam fungsi tujuan. Tambahkan prioritas dan bobot yang tepat jika diperlukan.
f. Nyatakan keperluan non-negatif
Langkah ini merupakan bagian resmi dari perumusan program tujuan ganda.
Prosedur formulasi ini merupakan salah satu pendekatan yang mungkinbermanfaat dalam perumusan model program tujuan ganda.
2. Model Tujuan Tunggal
Program tujuan ganda dan program linear memiliki hubungan. Sebuah program linear dapat diubah menjadi program tujuan ganda dengan model tujuan tunggal.
Diubah menjadi Program tujuan ganda:
Ada 3 jenis model banyak tujuan, yaitu: a. Tujuan banyak tanpa prioritas.
Bentuk umum:
, −, + 0, = 1,2,…, , = 1,2,…,
c. Tujuan banyak dengan prioritas dan bobot. Model umum:
Metode transportasi adalah metode yang digunakan untuk mengatur distribusi dari sumber-sumber yang menyediakan produk yang sama, ke tempat-tempat yang membutuhkan produk tersebut secara optimal. (Fien Zulkarnaen,2004).
Ciri-ciri khusus metode transportasi
Terdapat sejumlah sumber dan sejumlah tujuan.
1. Jumlah yang didistribusikan dari setiap sumber dan yang diminta oleh setiap tujuan adalah tertentu.
2. Jumlah yang dikirim atau diangkut dari suatu sumber ke suatu tujuan sesuai dengan permintaan atau kapasitas sumber. Jumlah permintaan dan persediaan harus seimbang, dan apabila tidah seimbang maka harus ditambahkan variabel dummy.
3. Biaya Transportasi dari suatu sumber ke suatu tujuan adalah tertentu.
4. Jumlah variabel dasar + −1, di mana m jumlah sumber dan n jumlah tujuan. Apabila kurang maka harus di tambahkan variabel dasar dengan nilai nol.
Model matematika untuk transportasi berdasarkan Nasendi dan Affendi (2005): Minimumkan:
= Variabel pengambil keputusan,produk yang diangkut dari sumber i ke tujuan j. = Jumlah yang disediakan untuk diangkut (jumlah persediaan) di sumber i. = Jumlah yang diminta untuk didatangkan (jumlah permintaan) di titik tujuan j.
= Ongkos pengangkutan per unit produk .
m = Jumlah sumber.
n = Jumlah tujuan.
2.3 Himpunan Fuzzy
Dalam kehidupan sehari-hari sering digunakan himpunan tegas, yaitu himpunan yang terdefinisi secara tegas, dalam arti bahwa untuk setiap elemen dalam semestanya selalu dapat ditentukan secara tegas apakah merupakan anggota dari himpunan itu atau tidak. Dengan kata lain, terdapat batas yang tegas antara unsur-unsur yang merupakan anggota dan unsur-unsur yang tidak merupakan anggota dr suatu
himpunan. Tetapi dalam kenyataannya tidak semua himpunan yang ada dalam kehidupan sehari-hari tidak semua terdefinisi secara tegas.. Misalnya himpunan orang kaya, mahasiswa pandai, tinggi badan, umur dan sebagainya. Pada himpunan umur, tidak dapat ditentukan secara tegas apakah seseorang muda, setengah baya atau tua, tanpa mendefinisikannya. Misalnya variabel umur dibagi menjadi 3 kategori yaitu: Muda umur < 35 tahun
Setengah baya 35 ≤ umur ≤ 55 tahun
Tua umur > 55 tahun.
Pemakaian himpunan tegas untuk menyatakan umur sangat tidak adil, karena adanya perubahan kecil saja sudah mengakibatkan kategori yang cukup signifikan.
Himpunan fuzzy digunakan untuk mengantisipasi hal tersebut. Seseorang dapat masuk dalam 2 himpunan yang berbeda, misalnya muda dan setengah baya, setengah baya dan tua, dan sebagainya. Seberapa besar eksistensinya dalam himpunan tersebut, dapat dilihat pada nilai keanggotaan nya.
Gambar 2.1 Himpunan fuzzy variabel umur
Pada gambar dapat dilihat bahwa seseorang yangberusia 40 tahun termasuk dalam himpunan muda dengan µmuda(40) = 0,25, namun dia juga termasuk dalam
himpunan setengah baya dengan µstgahbaya(40) = 0,5. Begitu juga dengan seseorang
yang berumur 50 tahun, termasuk dalam himpunan setengah baya dengan µstghbaya(50)
= 0,25, namun dia juga termasuk dalam himpunan tua dengan µtua(50) = 0,5.
1 2 3
1
0
2.3.1 Fungsi Keanggotaan
Fungsi keanggotaan (membership function) adalah suatu kurva yang menunjukkan pemetaan titik-titik input data ke dalam nilai keanggotaan atau derajat keanggotaan yang memiliki interval antara 0 sampai 1.
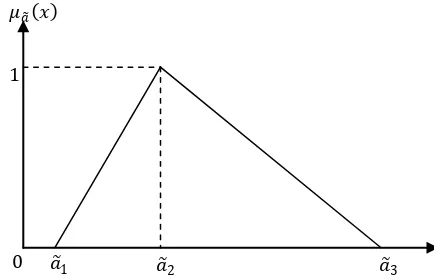
1. Fungsi Keanggotaan Segitiga
Sebuah fungsi anggota himpunan kabur dikatakan fungsi keanggotaan segitiga jika mempunyai tiga buah parameter, yaitu a a 1, 2 dan a3 adalah bilangan real dengan
1 < 2 < 3 dinyatakan sebagai berikut:
=
− 1 ( 2− 1), untuk 1 2 3− 3− 2 , untuk 2 3
0, untuk yang lain
Gambar berikut merupakan gambar bilangan fuzzy dengan fungsi keanggotaan segitiga
Gambar 2.2. Bilangan Fuzzy dengan Fungsi keanggotaan Segitiga
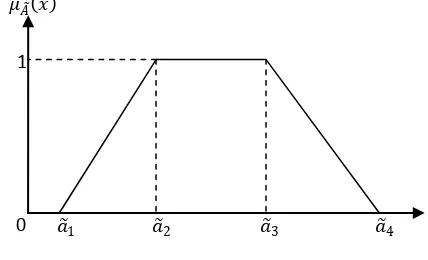
2. Fuzzy Keanggotaan Trapezoidal
Suatu bilangan fuzzy = ( 1, , 3, 4) adalah trapezoidal, dinotasikan
( 1, 2, 3, 4) di mana 1, 2, 3 dan 4adalah bilangan real dan fungsi keanggotaan
( ) adalah
1
0 1 2 3 4
=
− 1 ( 2− 1), untuk 1 2
1, untuk 2 3 4− 4− 3 , untuk 3 4
0, untuk yang lain
Bilangan fuzzy trapezoidal direpresentasikan oleh 4 bilangan real yaitu 1, 2, 3, 4 di mana ( 1 < 2 < 3 < 4). Lihat Gambar 2.3.
Gambar 2.3 Bilangan Fuzzy dengan Fungsi keanggotaan Trapezoidal
2.3.2 Permasalahan Fuzzy transportasi
Model transportasi sangat penting bagi perencanaan produksi, parameter-parameter pada model transportasi adalah biaya, nilai persediaan, dan nilai permintaan. Pada prakteknya besar biaya, nilai permintaan dan jumlah persediaan pada suatu transportasi tidak dapat diketahui secara pasti. Apabila hal ini terjadi, maka salah satu solusinya dapat dicari dengan menggunakan operasi fuzzy.
Pada bagian ini, besarnya biaya ditetapkan secara eksak, sedangkan jumlah persediaan dan permintaan belim diketahui secara pasti. Ketidakjelasan ini bisa disebabkan oleh kurangnya informasi atau kebijakan khusus dari suatu perusahaan. Pada masalah transportasi biasa dengan nilai persediaan dan permintaan yang bernilai integer akan selalu menghasilkan solusi yang juga bernilai integer. Pada fuzzy integer transportation problem, dibutuhkan suatu algoritma khusus untuk mendapatkan suatu nilai integer yang optimal.
Formulasi permasalahan fuzzy transportasi adalah sebagai berikut:
= Variabel pengambil keputusan, jumlah produk yang diangkut dari sumber i ke tujuan j.
= Jumlah yang disediakan untuk diangkut (jumlah persediaan) di sumber i, berupa bilangan fuzzy.
= Jumlah yang diminta untuk didatangkan (jumlah permintaan) di titik tujuan j, berupa bilangan fuzzy.
= Ongkos pengangkutan per unit produk
m = Jumlah sumber.
n = Jumlah tujuan.
2.4 Pengenalan Software QM for Windows
Program QM for windows merupakan paket program komputer untuk menyelesaikan persoalan-persoalan metode kuantitatif, managemet sains atau riset operasi. QM for windows merupakan gabungan dari program terdahulu DS dan POM for Windows, jadi jika dibandingkan dengan program POM for Windows, modul-modul yang tersedia di QM for Windows lebih banyak. Namun ada modul-modul yang hanya
tersedia di program POM for Windows atau hanya tersedia di program DS for Windows.
Program-program QM for Windows, DS for Windows dan POM for Windows, diterbitkan oleh Prentice Hall (www.prentice-hall.com), dan sebagian program merupakan bawaan dari beberapa buku terbitan Prentice Hall. Tampilan sementara (splash) setelah program QM for Windows dijalankan tampak pada Gambar 2.1
Gambar 2.4 Tampilan sementara (splash) dari program QM for Windows
Setelah tampilan sementara, akan muncul tampilan seperti Gambar 2.2.
Gambar 2.5 Tampilan Awal QM for Windows
Gambar 2.6 Pilihan Modul yang tersedia pada QM for Windows
Gambar 2.7 Baris menu (menu bar) sebelum dipilih Modul
Gambar 2.8 Baris Menu (menu bar) setelah dipilih suatu Modul
Gambar 2.9 baris tool (tool bar) sebelum dipilih Modul
Gambar 2.10 Baris Tool (tool bar) setelah dipilih suatu Modul
Gambar 2.11 Ruang Instruksi
Gambar 2.8 Baris Utilitas (utility bar)
BAB 3 PEMBAHASAN
3.1 Pendekatan Program tujuan ganda
Tahapan penyelesaian permasalahan fuzzy transportasi dengan pendekatan program tujuan ganda adalah sebagai berikut:
Kasus Fuzzy Transportasi
Memaksimalkan dengan teknik fuzzy programming untuk memperoleh solusi optimal
Mengambil suatu nilai p untuk melebihkan nilai tujuan lalu ubah menjadi persamaan program tujuan
ganda untuk persamaan linear
Menarik kesimpulan
Suatu permasalahan fuzzy Transportasi dapat didekati dengan program tujuan ganda. Model linear dari fuzzy transportasi:
Min
Fungsi objektif dapat diasumsikan hanya satu dari k pilihan. Cara untuk memperoleh solusi optimal dari permasalahan fuzzy transportasi pada kasus ini dengan empat tujuan adalah
Kasus di atas dapat diubah menjadi:
= 1 2 1+ 1− 1 2 2+ 1 1− 2 3+ 1− 1 1− 2 4 = �
Untuk meminimalkan ϕ , fungsi keanggotaan tujuan yang disesuaikan dengan apa yang diinginkan, adalah sebagai berikut:
− �
( − )−
++ − = 1
di mana dan adalah batas atas dan batas bawah dari level yang diinginkan dari harga tujuan dan + dan −.
Digunakaan metode program tujuan ganda untuk permasalahan program linear dengan meminimalkan tipe fungsi tujuan.
Min 1++ 1−+ 2++ 2−
Batasan nonlinear dari masalah tersebut dapat dilinearkan dengan mendefinisikan 3 = 1 2 dengan membuat batasan linear 1+ 2−1 2 3
1+ 2, 3 = 0 atau 1
�
( − )+ 2
+−
2−= ( − )
0 dan integer,, 1 = 0 atau 1, 2 = 0 atau 1, 3 = 0 atau 1
Sekarang dipertimbangkan model transportasi berikut, di mana harga tujuan dapat diasumsikan dengan nilai pada daerah yang ditetapkan yaitu
( ) penalti untuk mencapai sebuah nilai yang kurang lebih dari nilai aspirasinya. Gunakan metode program tujuan ganda untuk permasalahan program linear dengan meminimalkan tipe fungsi objektif, dan dimodelkan permasalahan program tujuan ganda berikut.
3.2 Solusi Permasalahan Fuzzy transportasi
Persamaan (4) dan (6) adalah permasalahan program linear dengan batasan yang fuzzy dan tegas adalah
Min
Kendala (7)
0
adalah vektor kolom dari bilangan fuzzy dengan fungsi keanggotaan trapezoidal. Permasalahan ini dapat diselesaikan dengan menyamakan metodenya. Misal ∗ adalah derajat maksimum dari nilai kepuasan batasan fuzzy. Fungsi keanggotaan dari fungsi objektif dapat ditentukan dengan menyelesaikan dua masalah program linear berikut.
Min
Kendala 4−( 4− 3) ∗
1+ ( 2− 1) ∗
0
Untuk ∗ = 1
Min = 1
Kendala 4− 4− 3 = 3 (8)
1+ 2− 1 = 2
0
Untuk ∗ = 0
Min = 0
Kendala 4 (9)
1
0
Fungsi keanggotaan dari fungsi objektif dari (7) adalah
=
1, jika 0
− 1 0− 1
, jika 0 1
0, jika 1
Dengan menerapkan teknik fuzzy programming, diperoleh
Max
Kendala ( 0 − 1) + 1
4− 3 + 4 −( 2− 1) + 1
0
Optimal solusi dari program linear pada persamaan (10) memberikan solusi optimal untuk mempertimbangkan permasalahan fuzzy transportasi.
3.3 Contoh kasus Fuzzy transportasi
Kasus fuzzy transportasi di ambil dari jurnal “Multi-Objective Goal Programming Approach to a Fuzzy Transportation Problem” tahun 2011.
3.3.1 Kasus dengan Tujuan Diskrit
Kasus fuzzy transportasi dengan fungsi tujuan yang diskrit:
= 2 11+ 3 12 + 4 21+ 2 22 = {9,10,11,12} Kendala 11+ 12 ≅ 1,2,3,4
21 + 22 ≅(2,3,5,6)
11+ 21 ≅ (1,2,3,5)
12+ 22 ≅ (2,4,5,6)
0 dan integer, = 1,2, = 1,2
Formulasi program tujuan ganda dari persamaan (4) adalah Min 1++ 1−+ 2++ 2−
Dapat diselesaikan dengan mengubah menjadi dua program linear dari (8), (9) dan (10)
1. Pada persamaan (8) diperoleh Min 1++ 1−+ 2++ 2−
Dengan nilai optimal dari fungsi objektif 1 = 1
2. Pada persamaan (9) diperoleh
Dengan QM for Windows diperoleh
12 = 1, 21 = 1, 22 = 1, 1+, 1−, 2+, 2− = 0,�= 9 Dengan nilai optimal dari fungsi objektif 0 = 0
0dan integer, = 1,2, = 1,2
�, 1+, 1−, 2+, 2− 0, 1 = 0 atau 1, 2 = 0 atau 1
Optimal solusi 11 = 2, 22 = 4, dengan total biaya transportasi adalah 12 dengan derajat kepuasan = 1.
3.3.2 Kasus dengan Tujuan Kontinu
Permasalahan fuzzy transportasi untuk fungsi tujuan kontinu adalah
= 2 11+ 3 12+ 4 21+ 2 22 9dan 12
Formulasi program tujuan ganda adalah Min 2 ++ ++ −
Dapat diselesaikan dengan mengubah menjadi dua program linear dari (8), (9) dan (10)
1. Pada persamaan (8) diperoleh Min 2 ++ ++ −
Kendala 11+ 12 3
Maka nilai optimal dari fungsi objektif adalah 1 = 3.
2. Pada persamaan (9) diperoleh Min 2 ++ ++ − Dengan nilai optimal dari fungsi objektif 0= 0
3. Dari persamaan (10) diperoleh Max
Kendala 3 + 2 ++ ++ − 3
11+ 12+ 4 11+ 12− 1 21 + 22+ 6
21 + 22− 2 (16) 11+ 21+ 2 5
11+ 21− 1 12+ 22+ 6 12+ 22−2 2
2 11+ 3 12+ 4 21 + 2 22 − ++ −− = 0
− ++ −= 8
8 10
0dan integer, = 1,2, = 1,2
�, 1+, 1−, 2+, 2− 0
Optimal solusi 11 = 2, 22 = 4, dengan total biaya transportasi adalah 12 dengan derajat kepuasan = 1.
BAB 4
KESIMPULAN DAN SARAN
4.1 Kesimpulan
Dari skripsi ini dapat disimpulkan beberapa hal, antara lain:
1. Pendekatan model program tujuan ganda dapat digunakan untuk menyelesaikan permasalahan fuzzy transportasi dengan bilangan fuzzy yang merupakan fungsi keanggotaan trapezoidal.
2. Model program tujuan ganda dapat diubah menjadi dua persamaan linear.
4.2 Saran
Sebagai saran yang ditujukan pada pembaca yaitu:
1. Himpunan fuzzy tidak hanya mempunyai fungsi keanggotaan trapezoidal, sehingga bagi para pembaca yang berniat untuk meneliti, mungkin dapat melanjutkan dengan fuzzy transportasi dengan bilangan fuzzynya merupakan fungsi keanggotaan lain, selain trapezoidal.
2. Pembaca juga dapat menyelesaikan fuzzy transportasi dengan pendekataan pendekataan lain.
DAFTAR PUSTAKA
Bellman, R.E. dan Zadeh, L.A. 1970. Decision Making in a Fuzzy Environment. Management Sciences 17(4) : hal. 141-164.
Chanas, S. dan Kucha. 1998. Fuzzy Integer Transportation Problem. Fuzzy Set and Systems, 98: hal. 291-298
Chang, C,T. 2007. Multi-Choice Goal Programming. European Jurnal of Operation Research. Hal 389-396.
Dutta, D. dan Murthy, S. 2010. Multi-Choice Goal Programming Approach For A Fuzzy Transportation Problem: IJJRAS 2(2): hal. 132-139.
Hossein Abdollahnejad Barough. 2011. A Multi-Objective Goal Programming Approach to a Fuzzy Transportation Problem: The case of a General Contractor Company. The Journal of Mathematics and Computer Science 2(1): hal. 9-19.
Mulyono, Sri. 1991. Operation Research. Lembaga Penerbit Fakultas Ekonomi Universitas Indonesia, Jakarta.
Nasendi, B.D. dan Anwar Affendi. 1985. Program Linear dan Va riasinya. Jakarta: PT.Gramedia.
Pangestu, S., Marwan, A. dan Hani. H. 1984. Dasar-Dasa r Operations Research. Yogyakarta: BPFE-Yogyakarta.
Rao, S.S. 1977. Optimization. New Delhi: Wiley Eastern Limited.
Supranto, Johannes. 1988. Riset Operasi. Jakarta: Penerbit Universitas Indonesia.
Susilo, F. 2006. Himpunan dan Logika Kabur Serta Aplikasinya. Yogyakarta: Graha Ilmu.
Wijayanto, P. 2007. Panduan Program Aplikasi. Jurnal Kuliah Fakultas Ekonomi Universitas Kristen Satya Wacana, Salatiga.
Zulfikarijah, Fien. 2004. Operations Research. Malang: Bayumedia Publishing.