ANATOMI MANUSIA BERDIMENSI TIGA MENGGUNAKAN LEAP MOTION CONTROLLER
SKRIPSI
FARHAN LUTHFI NAINGGOLAN 101402048
PROGRAM STUDI S1 TEKNOLOGI INFORMASI
FAKULTAS ILMU KOMPUTER DAN TEKNOLOGI INFORMASI UNIVERSITAS SUMATERA UTARA
ANATOMI MANUSIA BERDIMENSI TIGA MENGGUNAKAN LEAP MOTION CONTROLLER
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh ijazah Sarjana Teknologi Informasi
FARHAN LUTHFI NAINGGOLAN 101402048
PROGRAM STUDI S1 TEKNOLOGI INFORMASI
FAKULTAS ILMU KOMPUTER DAN TEKNOLOGI INFORMASI UNIVERSITAS SUMATERA UTARA
ii
PERSETUJUAN
Judul : ANATOMI MANUSIA BERDIMENSI TIGA
MENGGUNAKAN LEAP MOTION CONTROLLER
Kategori : SKRIPSI
Nama : FARHAN LUTHFI NAINGGOLAN
Nomor Induk Mahasiswa : 101402048
Program Studi : S1 TEKNOLOGI INFORMASI
Departemen : TEKNOLOGI INFORMASI
Fakultas : ILMU KOMPUTER DAN TEKNOLOGI
INFORMASI UNIVERSITAS SUMATERA UTARA Komisi Pembimbing :
Pembimbing 2 Pembimbing 1
Baihaqi Siregar, S.Si., M.T M. Fadly Syahputra, B.Sc., M.Sc.IT NIP. 19790108 201212 1 002 NIP. 19830129 200912 1 003
Diketahui/disetujui oleh
Program Studi S1 Teknologi Informasi Ketua,
PERNYATAAN
ANATOMI MANUSIA BERDIMENSI TIGAMENGGUNAKAN LEAP MOTION CONTROLLER
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil karya saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing telah disebutkan sumbernya.
Medan, 22 Oktober 2015
iv
UCAPAN TERIMA KASIH
Alhamdulillah, puji dan syukur penulis ucapkan kepada Allah SWT., atas berkat dan rahmat-Nya penulis dapat menyelesaikan skripsi ini sebagai syarat untuk memperoleh gelar Sarjana Teknologi Informasi. Selawat dan salam turut dihadiahkan kepada Nabi Muhammad SAW. Allahumma shalli wa salim wa barik alaih.
Pertama-tama, penulis ingin mengucapkan terima kasih kpeada Bapak M. Fadly Syahputra, B.Sc., M.Sc.IT selaku pembimbing pertama dan Bapak Baihaqi Siregar, S.Si., M.T selaku pembimbing kedua yang telah membimbing penulis dalam penelitian serta penulisan skripsi ini. Penulis juga mengucapkan terima kasih kepada Bapak Dr. Sawaluddin, M.IT selaku dosen pembanding pertama dan Bapak Seniman, M. Kom. selaku dosen pembanding kedua yang telah memberikan masukan serta kritik yang bermanfaat dalam penulisan skripsi ini. Penulis juga menyampaikan ucapan terima kasih kepada seluruh dosen serta pegawai program studi S1 Teknologi informasi, yang telah membantu serta membimbing penulis selama proses perkuliahan.
Penulis tentunya tidak lupa berterima kasih kepada kedua orang tua penulis, Drs. Abdul Maulud Nainggolan, M.Si. dan Nazli Zain, yang telah membesarkan dan membimbing penulis hingga saat ini. Terima kasih juga penulis ucapkan kepada kakak penulis, Mutia Hasanah Nainggolan, S.T. dan kedua adik penulis, Abdul Hafidz Nainggolan dan Fadhlan Mukhlis Nainggolan, yang telah memberi dukungan kepada penulis dalam menyelesaikan skripsi ini.
ABSTRAK
Anatomi merupakan cabang dari ilmu biologi yang mempelajari struktur dan bagian-bagian dari suatu organisme. Ilmu yang diterapkan dalam bidang medis ini tidak mudah untuk dipelajari. Oleh karena itu, diperlukan suatu teknologi modern sebagai salah satu pilihan metode pembelajaran yang dapat membantu mempelajari ilmu anatomi. Pada penelitian ini penulis menggunakan anatomi berdimensi tiga berupa sistem multimedia yang dibantu dengan alat Leap Motion Controller yang mendukung gerakan jari dan tangan sebagai masukan. Dengan menggunakan alat ini, anatomi berdimensi tiga dapat dikendalikan dengan gestur-gestur dari gerakan tangan pengguna. Hasil pengujian yang didapat menunjukkan bahwa dengan nilai rata-rata sebesar 4,13 dalam skala Likert, pengguna setuju bahwa anatomi manusia berdimensi tiga menggunakan Leap Motion Controller adalah sistem yang sangat interaktif. Selain itu, dengan nilai rata-rata paling rendah 4,07 dalam skala Likert, pengguna juga setuju dengan gestur-gestur tangan yang diterapkan pada masing-masing fitur pada sistem pantas untuk digunakan.
vi
THREE DIMENSIONAL HUMAN ANATOMY USING LEAP MOTION
CONTROLLER
ABSTRACT
Anatomy is a branch of biology which study the structure and parts of an organism. This science that is applied in medical field is not easy to learn. Therefore, a modern technology is required as an option of learning method to help study in anatomy. In this research, the author proposed a three dimensional anatomy supported by a device called Leap Motion Controller that supports finger and hand motions as an input. By using this device, a three dimensional anatomy can be controlled by user hand gestures. The result in this research indicated that in a minimum average value of 4.13 in Likert scale, the users agree that three dimensional anatomy using Leap Motion Controller is a very interactive system. Furthermore, in a minimum average value of 4.07 in Likert scale, the users also agree that hand gestures are suitable to use in each of their features.
DAFTAR ISI
Hal.
Persetujuan ii
Pernyataan iii
Ucapan Terima Kasih iv
Abstrak v
Abstract vi
Daftar Isi vii
Daftar Tabel ix
Daftar Gambar x
BAB 1 Pendahuluan 1
1.1. Latar Belakang 1
1.2. Rumusan Masalah 2
1.3. Tujuan Penelitian 3
1.4. Batasan Masalah 3
1.5. Manfaat Penelitian 3
1.6. Metodologi Penelitian 3
1.7. Sistematika Penulisan 4
BAB 2 Landasan Teori 6
2.1. Anatomi 6
2.1.1. Anatomi Manusia 7
2.1.2. Sejarah Anatomi 7
viii
2.2. Leap Motion Controller 11
2.2.1. Fitur-Fitur Leap Motion Controller 12
2.2.2. Spesifikasi Leap Motion Controller 13
2.2.3. Antarmuka Leap Motion Controller 16
2.2.4. Controller 19
BAB 3 Analisis dan Perancangan 30
3.1. Arsitektur Umum 30
3.2. Anatomi Berdimensi Tiga 31
3.3. Pengamatan Gerakan Tangan dan Jari 32
3.4. Penamaan Objek Anatomi 36
BAB 4 Implementasi dan Pengujian 38
4.1. Implementasi Sistem 38
4.1.1. Spesifikasi Perangkat Keras dan Lunak yang Digunakan 38
4.1.2. Implementasi Perancangan Antarmuka 39
4.2. Pengujian Sistem 43
4.2.1. Rencana Pengujian Sistem 43
4.2.2. Kasus dan Hasil Pengujian Sistem 44
4.3. Keterbatasan Leap Motion Controller 52
BAB 5 Kesimpulan dan Saran 53
5.1. Kesimpulan 53
5.2. Saran 54
x
DAFTAR TABEL
Hal.
Tabel 2.1. Konfigurasi Key String pada Gesture 27
Tabel 4.1. Rencana Pengujian 44
Tabel 4.2. Hasil Pengujian 44
Tabel 4.3. Skala Likert pada Kuesioner 48
Tabel 4.4. Kuesioner Tingkat Kesetujuan Interaksi dan Gestur 48
DAFTAR GAMBAR
Hal. Gambar 2.1. Bagian melintang dari jaringan tulang padat 6
Gambar 2.2. Anatomi tengkorak manusia 7
Gambar 2.3. Tubuh-tubuh yang diplastinasi 9
Gambar 2.4. Tampilan Anatomi dalam PDF berdimensi tiga 10
Gambar 2.5. Jarak deteksi Leap Motion Controller 12
Gambar 2.6. Sistem arsitektur antarmuka aplikasi alami dengan Leap Motion
Controller 15
Gambar 2.7. Sistem arsitektur antarmuka aplikasi web dengan Leap Motion
Controller 16
Gambar 2.8. TipPosition dan Direction dari kelas Finger 22 Gambar 2.9. Contoh penggunaan Circle Gesture dengan ujung jari 24
Gambar 2.10. Contoh penggunaan Swipe Gesture 25
Gambar 2.11. Contoh penggunaan Screen Tap Gesture 26
Gambar 2.12. Contoh penggunaan Key Tap Gesture 26
Gambar 2.13. Penggenggaman alat berbentuk V untuk pengukuran dinamis 28
Gambar 3.1. Arsitektur umum sistem yang diajukan 31
xii
Gambar 3.5. Passive Locomotor System, Skeleton 37
Gambar 4.1. Start Scene 39
Gambar 4.2. Loading image 40
Gambar 4.3. Main Scene 40
Gambar 4.4. Zoom Mode 41
Gambar 4.5. Rotate Mode 42
Gambar 4.6. Pergerakan kamera searah vertikal 42
Gambar 4.7. Penampilan nama objek anatomi 43
Gambar 4.7. Penampilan nama objek anatomi 35
ABSTRAK
Anatomi merupakan cabang dari ilmu biologi yang mempelajari struktur dan bagian-bagian dari suatu organisme. Ilmu yang diterapkan dalam bidang medis ini tidak mudah untuk dipelajari. Oleh karena itu, diperlukan suatu teknologi modern sebagai salah satu pilihan metode pembelajaran yang dapat membantu mempelajari ilmu anatomi. Pada penelitian ini penulis menggunakan anatomi berdimensi tiga berupa sistem multimedia yang dibantu dengan alat Leap Motion Controller yang mendukung gerakan jari dan tangan sebagai masukan. Dengan menggunakan alat ini, anatomi berdimensi tiga dapat dikendalikan dengan gestur-gestur dari gerakan tangan pengguna. Hasil pengujian yang didapat menunjukkan bahwa dengan nilai rata-rata sebesar 4,13 dalam skala Likert, pengguna setuju bahwa anatomi manusia berdimensi tiga menggunakan Leap Motion Controller adalah sistem yang sangat interaktif. Selain itu, dengan nilai rata-rata paling rendah 4,07 dalam skala Likert, pengguna juga setuju dengan gestur-gestur tangan yang diterapkan pada masing-masing fitur pada sistem pantas untuk digunakan.
vi
THREE DIMENSIONAL HUMAN ANATOMY USING LEAP MOTION
CONTROLLER
ABSTRACT
Anatomy is a branch of biology which study the structure and parts of an organism. This science that is applied in medical field is not easy to learn. Therefore, a modern technology is required as an option of learning method to help study in anatomy. In this research, the author proposed a three dimensional anatomy supported by a device called Leap Motion Controller that supports finger and hand motions as an input. By using this device, a three dimensional anatomy can be controlled by user hand gestures. The result in this research indicated that in a minimum average value of 4.13 in Likert scale, the users agree that three dimensional anatomy using Leap Motion Controller is a very interactive system. Furthermore, in a minimum average value of 4.07 in Likert scale, the users also agree that hand gestures are suitable to use in each of their features.
BAB 1
PENDAHULUAN
Bab ini membahas tentang hal-hal yang menjadi latar belakang pembuatan tugas akhir, rumusan masalah, tujuan, batasan masalah, manfaat, metodologi penelitian serta sistematika penulisan tugas akhir.
1.1. Latar Belakang
Anatomi merupakan cabang dari ilmu biologi yang mempelajari struktur dan bagian-bagian dari suatu organisme. Ilmu ini diterapkan dalam bidang medis. Oleh karena itu, ilmu anatomi, khususnya anatomi manusia, sangat penting dipelajari oleh para pelajar ilmu kesehatan. Namun, masih saja terdapat kesulitan bagi pelajar ilmu kesehatan untuk mempelajari ilmu anatomi karena ilmu ini cenderung dipelajari dengan cara menghapal melalui buku teks (Notebeart, 2009).
Salah satu cara untuk meningkatkan kemampuan mempelajari ilmu anatomi adalah dengan menggunakan sistem pembelajaran modern. Salah satunya adalah mempelajari anatomi menggunakan teknologi berdimensi tiga (Hoyek, et al. 2011). Selain itu, sarana seperti alat-alat pendukung teknologi berdimensi tiga juga dapat meningkatkan interaksi pengguna sehingga anatomi lebih dapat diamati dengan cara yang menarik.
2
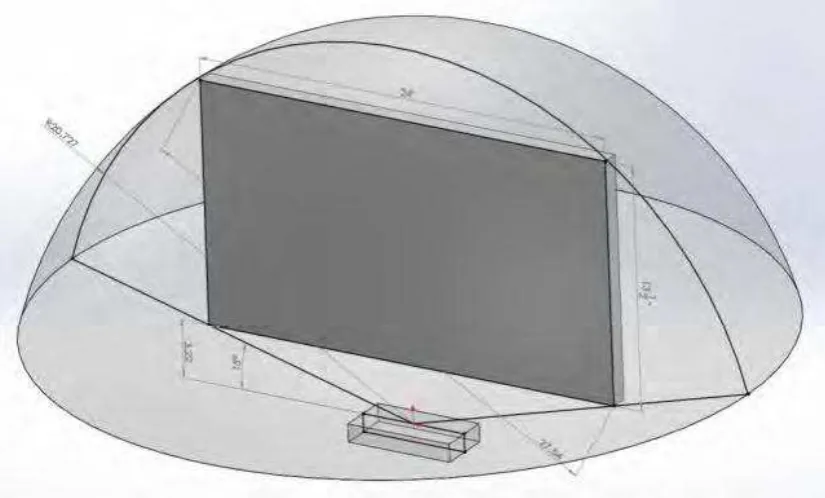
mengamati permukaan berbentuk menyerupai hemisphere di atasnya dengan jarak jangkauan sekitar 1 meter.
Leap Motion Controller dapat meningkatkan interaksi manusia dengan komputer (Nowicki, et al. 2014). Leap Motion Controller adalah alat yang dirancang untuk melacak gerakan tangan dan jari. Di saat sistem dijalankan, penguna dapat melakukan berbagai aktivitas dengan gerakan tangan. Gerakan tangan ini diamati oleh sensor pada Leap Motion Controller sebagai input untuk melakukan berbagai hal yang dapat memicu terjadinya kejadian-kejadian dalam program. Pada anatomi manusia berdimensi tiga, gerakan tangan ini akan membuat pengguna seolah sedang berinteraksi langsung dan bersentuhan dengan model anatomi manusia berdimensi tiga.
Gestur merupakan suatu gerakan statis maupun dinamis yang digunakan sebagai sarana komunikasi antara manusia dengan mesin dan begitu juga dengan sesama manusia yang menggunakan bahasa isyarat (Khan, et al. 2012). Dengan menggunakan gestur tangan yang diamati Leap Motion Controller dapat dilakukan kendali pada sistem. Gestur-gestur tertentu dapat menjadi pemicu terjadinya suatu proses pada sistem. Posisi tangan yang melakukan gestur dapat didukung karena gerak translasi Leap Motion Controller berdimensi tiga.
Anatomi yang memanfaat teknologi modern juga sudah pernah diterapkan seperti pada Implementasi Teknologi Augmented Reality (AR) Pada Aplikasi Smart Book Pengenalan Anatomi Manusia Menggunakan Metode Occlusion Based Interaction Berbasis Desktop (Riandi, 2014). Leap Motion Controller sudah banyak digunakan dalam berbagai sistem, seperti A Preliminary Evaluation of the Leap Motion Sensor as Controller of New Digital Musical Instruments (Silva, et al. 2013) dan Rancang Bangun Aplikasi Papan Tulis Virtual dengan Menggunakan Leap Motion (Yowanda, et al. 2014).
Berdasarkan latar belakang di atas, maka judul penelitian ini adalah “Anatomi Manusia Berdimensi Tiga Menggunakan Leap Motion Controller”.
1.2. Rumusan Masalah
satunya adalah dengan menggunakan teknologi modern. Oleh karena itu, diperlukan suatu teknologi modern berupa sistem multimedia sebagai salah satu pilihan metode pembelajaran yang dapat membantu mempelajari ilmu anatomi.
1.3. Tujuan Penelitian
Tujuan dari penelitian ini adalah penggunaan Leap Motion Controller sebagai alat bantu untuk sistem pengenalan anatomi manusia berdimensi tiga.
1.4. Batasan Masalah
Untuk menghindari penyimpangan dan perluasan yang tidak diperlukan, penulis hanya menggunakan model anatomi manusia bagian Passive Locomotor System,Skeleton.
1.5. Manfaat Penelitian
Manfaat dari penelitian ini adalah:
1. Menciptakan sebuah sistem anatomi berdimensi tiga yang interaktif dengan pengguna.
2. Memahami cara kerja dan implementasi Leap Motion Controller pada suatu sistem.
1.6. Metodologi Penelitian
Tahapan-tahapan yang dilakukan pada pelaksanaan penelitian ini adalah sebagai berikut.
1. Studi Literatur
Studi literatur dilakukan dalam rangka pengumpulan bahan referensi mengenai anatomi dan Leap Motion Controller.
2. Analisis Permasalahan
4
3. Penyusunan Model
Pada tahap ini model objek anatomi manusia berdimensi tiga disusun sesuai dengan batasan masalah sehingga dapat digunakan sebagai sistem anatomi manusia berdimensi tiga.
4. Implementasi
Pada tahap ini dilakukan implementasi Leap Motion Controller sehingga dapat digunakan sebagai alat bantu interaksi manusia dan komputer pada sistem anatomi manusia berdimensi tiga.
5. Evaluasi dan Analisis Hasil
Pada tahap ini dilakukan evaluasi serta analisis terhadap hasil yang didapatkan melalui implementasi Leap Motion Controller pada sistem anatomi manusia berdimensi tiga.
6. Dokumentasi dan Pelaporan
Pada tahap ini dilakukan dokumentasi dan penyusunan laporan hasil evaluasi dan analisis serta implementasi Leap Motion Controller pada sistem anatomi manusia berdimensi tiga.
1.7. Sistematika Penulisan
Sistematika penulisan dari skripsi ini terdiri atas lima bagian utama sebagai berikut.
Bab 1: Pendahuluan
Bab ini berisi latar belakang dari penelitian yang dilaksanakan, rumusan masalah, tujuan penelitian, batasan masalah, manfaat penelitian, metodologi penelitian, serta sistematika penulisan.
Bab 2: Landasan Teori
Bab 3: Analisis dan Perancangan
Bab ini membahas analisis dan pengimplementasian Leap Motion Controller pada sistem anatomi manusia berdimensi tiga. Pada bab ini dijabarkan arsitektur umum, proses yang dilakukan serta cara kerja alat yang digunakan.
Bab 4: Implementasi dan Pengujian
Bab ini berisi pembahasan tentang implementasi dari perancangan penerapan yang telah dijabarkan pada bab 3. Selain itu, hasil yang didapatkan dari pengujian yang dilakukan terhadap implementasi yang dilakukan juga dijabarkan pada bab ini.
Bab 5: Kesimpulan dan Saran
BAB 2
LANDASAN TEORI
Bab ini membahas tentang teori penunjang serta penelitian sebelumnya yang berhubungan dengan anatomi dan Leap Motion Controller.
2.1. Anatomi
Anatomi berasal dari kata bahasa Yunani anatemno, yang berasal dari dua kata, yakni
ana yang berarti atas dan temno yang berarti memotong. Anatomi merupakan cabang dari ilmu biologi yang mempelajari struktur dan bagian-bagian dari suatu organisme, termasuk sistem, organ, dan jaringan. Ilmu ini juga mempelajari penampilan dan posisi dari berbagai bagian tubuh, bahan penyusunnya, posisinya, dan hubungannya dengan bagian yang lain.
Berdasarkan cara pengamatannya, anatomi dapat dibagi menjadi dua. Yang pertama adalah mikroskopik anatomi yang mengamati objek-objek anatomi yang tidak bisa diamati dengan kasat mata sehingga dibutuhkan alat bantu khusus seperti mikroskop. Yang kedua adalah makroskopik anatomi, di mana anatomi dipelajari dengan pengamatan kasat mata atau tanpa alat bantu.
2.1.1. Anatomi Manusia
Anatomi manusia atau antro merupakan cabang dari ilmu anatomi. Gray (1918) menjelaskan ilmu ini dapat dipelajari dengan dua metode. Yang pertama adalah anatomi sistemik di mana berbagai struktur dianggap terpisah. Yang kedua adalah organ-organ dan jaringan-jaringan dipelajari hubungannya satu sama lain, hal ini disebut dengan topografikal atau anatomi regional.
2.2. Anatomy tengkorak manusia (Sobotta, 2001)
2.1.2 Sejarah Anatomi
Tubuh-8
tubuh hewan diperiksa, diamati, dan dibandingkan. Banyak penemuan-penemuan zaman kuno yang masih dipakai dalam ilmu anatomi sekarang ini seperti jantung, ginjal, hati, dan lain-lain. Bahkan pada peradaban Yunani kuno, sudah tercatat perbedaan antara arteri dan vena. Tercata juga dalam sejarah bahwa Hipocrates II adalah orang pertama yang menulis tentang anatomi manusia (Malomo, et al. 2006).
Anatomi terus berkembang dari zaman kuno menuju abad pertengahan. Tersebutlah Aelius Galenus atau Claudius Galenus (131-201 M), yang lebih dikenal dengan Galen of Pergamon, adalah seorang dokter yang memiliki reputasi yang baik sekali pada masanya. Selama masa yang dimilikinya, Galen menerbitkan lebih dari 200 buku dan berpengaruh dalam pemikiran anatomi dan obat-obatan untuk 1300 tahun ke depannya (Hagens, 2002).
Pada abad pertengahan terdapat larangan-larangan khususnya dari agama yang tidak memperbolehkan pembedahan tubuh manusia. Namun, pembedahan pada hewan tetap dapat dilakukan untuk tetap melakukan pembelajaran anatomi. Pada masa itu, terdapat beberapa kontribusi yang diberikan seperti perbaikan pada buku-buku Galen. Dua di antaranya adalah Ibn al-Nafis (1210-1288 M) yang memperbaiki bahwa tidak ada keterbukaan pada interventrikular dalam jantung dan Al-Baghdadi (1162-1231 M) yang menunjukkan bahwa rahang bawah tidak terdiri dari dua tulang (Prioreschi, 2006). Masih di abad pertengahan, nama Andreas Vesalius (1514-1564 M) muncul dalam sejarah literatur kedokteran di salah satu tempat yang terkenal (Ivanova, et al. 2001). Profesor anatomi dari Universitas Padua, Itali, ini dianggap sebagai penemu anatomi manusia modern. Dengan bukunya yang berjudul De humani corporis fabrica, disusunnya ke dalam tujuh volume. Andreas juga memperbaiki beberapa kesalahan yang terdapat dalam anatomi oleh Galen, seperti tujuh tulang di sternum dikuranginya menjadi tiga.
Gambar 2.3. Tubuh-tubuh yang diplastinasi (Hagens, 2002)
2.1.3 Pembelajaran Anatomi
Anatomi merupakan sebuah ilmu. Untuk mendapatkan suatu ilmu diperlukan upaya pembelajaran. Salah satu proses pembelajaran adalah dengan adanya upaya pengajaran. Benly (2014) meneliti berbagai pengajaran anatomi yang di antaranya adalah metode tradisional, metode pembedahan, dan metode Ultrasound Imaging.
1. Metode tradisional
Metode yang dapat dianggap sebagai metode paling tradistional adalah metode pengajaran melalui papan tulis dan kapur. Metode ini berpusat pada penjelasan di sebuah papan tulis dengan kapur mengenai kata-kata penting dan gambar-gambar yang berhubungan dengan anatomi. Meskipun saat ini sudah digunakan presentasi menggunakan sistem digital, cara pembelajaran anatomi tersebut masih dianggap metode tradisional.
2. Metode pembedahan
10
3. Metode Ultrasound Imaging
Metode Ultrasound Imaging merupakan salah satu contoh metode pengajaran anatomi menggunakan teknologi modern. Ultrasound Imaging berdasarkan kemampuannya untuk merefleksikan citra dari struktur-struktur di bawah tampilan, seperti kemampuan lainnya, yang membutuhkan latihan dan pengetahunan khusus. Gelombang ultrasound akan terus menembus objek anatomi dan merefleksikan sebagiannya.
Thiriet et al. (2011) meneliti beberapa metode pembelajaran anatomy manusia berdimensi tiga. Metode pembelajaran yang pertama adalah dengan menggunakan video animinasi berdimensi tiga yang ditampilkan sewaktu pengajaran. Metode yang kedua adalah menggunakan podcast, sebuah sarana multimedia yang dapat diakses dengan jaringan internet, untuk menampilkan video pembelajaran anatomi manusia. Metode yang terakhir adalah menggunakan Portable Document Format (PDF) berdimensi tiga untuk pembelajaran anatomi manusia.
2.2. Leap Motion Controller
Leap Motion Controller adalah alat sensor perangkat keras komputer yang mendukung gerakan tangan dan jari sebagai masukan, yang dapat disamakan fungsinya seperti
mouse, namun tidak membutuhkan kontak langsung dengan tangan atau sentuhan (Yowanda, et al. 2014). Leap Motion Controller terkadang juga disingkat menjadi Leap Motion. Namun, pengertian Leap Motion dapat juga berarti perusahaan Leap Motion yang mengeluarkan Leap Motion Controller. Maka dari itu alat yang berupa sensor gerak tangan ini seterusnya akan disebut dengan Leap Motion Controller.
Leap Motion Controller merupakan sebuah alat yang menarik. Dikarenakan bentuknya yang kecil, alat ini dapat dengan mudah diletakkan di permukaan meja maupun laptop atau keyboard (Canneyt, 2013). Selain diletakkan di atas meja dengan menghadap ke atas (table-mounted), alat ini juga bisa diletakkan di atas kepala ( head-mounted) menghadap depan maupun bawah dengan bantuan alat tertentu seperti Oculus Rift. Meskipun diletakkan di berbagai sisi dan dan menghadap ke berbagai arah, Leap Motion Controller dalam keadaan tetapnya akan menghasilkan posisi tangan yang sejajar dengan tubuh pengguna pada tampilan antarmuka.
12
Gambar 2.5. Jarak deteksi Leap Motion Controller (Yowanda, et al. 2014)
2.2.1. Fitur-Fitur Leap Motion Controller
Awalnya, Leap Motion Controller hanya dapat mengamati gerakan dan citra tangan secara menyeluruh, tanpa memperhatikan bagian-bagian tangan secara detail. Setelah beberapa perkembangan, Leap Motion Controller akhirnya mampu mengamati hal-hal yang lebih detail pada bagian tangan seperti ruas tangan, kiri atau kanan, skala genggaman tangan, dan sebagainya. Perkembangan ini disebut dengan Skeletal Tracking atau disebut juga dengan V2.
Adapun fitur-fitur yang terdapat pada Leap Motion Controller dengan Skeletal Tracking yang dimilikinya berdasarkan Leap Motion (2015) antara lain sebagai berikut. 1. Hand Model: model tangan yang digunakan setelah dikembangkannya V2 memberikan informasi yang lebih lengkap. Posisi ruas jari berserta perputaran engselnya lebih dapat diakses dan konsisten.
3. Grab: fitur ini mengindikasikan seberapa mirip tangan dengan kondisi menggenggam, dengan skala nol sampai satu. Setiap jari yang tidak ikut menggenggam akan mengurangi nilai skala tersebut.
4. Data Confidence: fitur ini mendeteksi ketika tangan sulit untuk diamati oleh Leap Motion Controller. Jika salah satu tangan mendekati pinggiran layar atau saling menutup satu sama lain, nilai fitur ini akan turun dari satu hingga nol.
5. Left or Right: pengamatan menandai tangan yang terdapat pada layar apakah kiri atau kanan.
6. Finger Type: pengamatan mendukung tangan dengan komposisi lima jari yang dapat diambil nilai posisi dan rotasinya masing-masing.
7. Bone Positions: fitur ini mengembalikan nilai posisi dan rotasi dari masing-masing tulang yang terdapat pada telapak jangan dan jari.
2.2.2. Spesifikasi Leap Motion Controller
Adapun spesifikasi teknis produk Leap Motion Controller berdasarkan Leap Motion (2015) adalah sebagai berikut
14
2.2.3. Antarmuka Leap Motion Controller
Terdapat dua jenis antarmuka pada Leap Motion Controller. Antarmuka ini digunakan dalam memperoleh data yang akan digunakan pada antarmuka pemograman aplikasi. Adapun kedua jenis antarmuka ini adalah antarmuka aplikasi alami dan antarmuka WebSocket.
Antarmuka aplikasi alami didukung melalui library yang diisi secara dinamis.
Library ini menghubungkan layanan Leap Motion dan mendukung data pengamatan tangan ke perangkat komputer. Library ini dapat langsung terhubung dengan pemrograman berbahasa C++ dan Objective-C, atau dapat juga dengan bahasa pemrograman yang tertentu yang terdapat untuk Java, C#, dan Phyton.
Adapun tahap-tahap pada antamuka pemrograman aplikasi ini adalah sebagai berikut.
1. Data dari pengamatan gerakan tangan yang diamati oleh Leap Motion Controller
diterima oleh layanan Leap Motion melalui USB. Data tersebut diproses dan dikirimkan ke aplikasi yang memungkinkan pengguanaan Leap Motion Controller.
Pada dasarnya, data tersebut dikirimkan ke aplikasi foreground. Namun, data tersebut juga dapat diterima oleh aplikasi background.
2. Aplikasi Leap Motion berjalan secara terpisah dengan layanannya dan memungkinkan dilakukannya pengaturan kepada instalasi Leap Motion.
3. Layanan Leap Motion mengirimkan data pengamatan gerakan tangan dan jari ke aplikasi latar depan. Aplikasi yang menggunakan Leap Motion Controller dapat terhubung dengan layanan tersebut menggunakan library alami dari Leap Motion. 4. Layanan Leap Motion akan berhenti mengirimkan data pengamatan gerakan tangan
Gambar 2.6. Sistem arsitektur antarmuka aplikasi alami dengan Leap Motion
Controller (Leap Motion, 2014)
Dalam antarmuka WebSocket, layanan Leap Motion menggunakan server WebSocket pada domain localhost pada port 6347. Antarmuka WebSocket mendukung data pengamatan gerakan tangan dan jari dalam bentuk pesan JSON. Klien library
JavaScript telah menyediakan penggunaan untuk pesan JSON dan menyajikan data pengamatan gerakan tangan dan jari sebagai objek JavaScript pada umumnya.
Adapun tahap-tahap dalam penggunaan antarmuka aplikasi web yang menggunakan Leap Motion Controller adalah sebagai berikut.
1. Server WebSocket yang didukung oleh layanan Leap Motion adalah http://127.0.0.1:6437.
2. Server WebSocket dapat diaktifkan maupun dibatalkan melalui panel kendali Leap Motion oleh pengguna.
3. Server mengirim data pengamatan gerakan tangan dan jari dalam bentuk pesan JSON. Aplikasi dapat mengirimkan pesan pengaturan kembali ke server.
4. Klien library JavaScript, leap.js, harus digunakan dalam aplikasi web tersebut.
16
memiliki struktur dan filosofi yang sama dengan antarmuka pemrograman aplikasi alami.
Gambar 2.7 Sistem arsitektur antarmuka aplikasi web dengan Leap Motion
Controller (Leap Motion, 2014)
2.2.3. WebSocket Communication
Leap Motion Controller yang terpasang pada suatu komputer dan memiliki aplikasinya mengkomunikasikan data tangan ke aplikasi menggunakan WebSocket. Server WebSocket ini didukung oleh proses leapd, yang dijalankan sebagai service pada Windows dan daemon pada OS X dan Linux. Server WebSocket ini juga menggunakan port 6347 pada domain localhost (http://127.0.0.1:6437).
"currentFrameRate": float
"id": float
"r": array dari float (Matriks)
"s": float
"t": array dari float (vector)
"timestamp": integer
"gestures": array dari objek Gesture
(Atribut-atribut vary by tipe gestur)
"center": array dari float (vector) -- hanya circle
"direction": array dari float (vector) -- hanya swipe,
keyTap, screenTap
"duration": microsecond dalam integer
"handIds": array dari integer
"id": integer
"normal": array dari float -- hanya circle
"pointableIds": array
"position": array dari float (vector) -- hanya swipe,
keyTap, screenTap
"progress": float -- hanya circle, keyTap, screenTap
"radius": float -- hanya circle
"speed": float -- hanya swipe
"startPosition": array dari float (vector) -- hanya swipe
"state": string -- salah satu dari "start", "update",
"stop"
"type": string -- salah satu dari "circle", "swipe",
"keyTap", "screenTap"
"hands": array dari objek Hand
"armBasis: vector berbasis tiga dari lengan (array dari
vector)
"armWidth: float
"confidence: float
"direction": array dari float (vector)
"elbow: array dari float (vector)
"grabStrength: float
18
"palmNormal": array dari float (vector)
"palmPosition": array dari float (vector)
"palmVelocity": array dari float (vector)
"pinchStrength: float
"r": array dari float (Matriks)
"s": float
"sphereCenter": array dari float (vector)
"sphereRadius": float
"stabilizedPalmPosition": array dari float (vector)
"t": array dari float (vector)
"timeVisible": float
"type": string -- salah satu dari "right" atau "left"
"wrist: array dari float (vector)
"interactionBox": object
"center": array dari float (vector)
"size": array dari float (vector)
"pointables": array dari objek Pointable
"bases": vector berbasis tiga untuk setiap tulang, dalam
index order, pergelangan hingga ujung jari, (array of
vectors).
"btipPosition": posisi ujung dari distal phalanx sebagai
array dari tiga float.
"carpPosition": posisi pangkal dari tulang metacarpal
sebagai array dari tiga float.
"dipPosition:" posisi pangkal dari distal phalanx sebagai
array dari tiga float.
"direction": array dari float (vector)
"extended": boolean (true atau false)
"handId": integer
"timeVisible": float
"tipPosition": array dari float (vector)
"tipVelocity": array dari float (vector)
"tool": boolean (true atau false)
"touchDistance": float
"touchZone": string – salah satu dari "none", "hovering",
"touching"
"type": integer - 0 adalah ibu jari; 4 adalah kelingking
"width": float
2.2.4. Controller
Controller merupakan kelas utama dalam penggunaan antarmuka pemrograman aplikasi yang menggunakan Leap Motion Controller. Controller juga terkadang disebut sebagai istilah lain dari Leap Motion Controller. Namun, dalam hal ini kita akan menyebut alat sensor tersebut sebagai Leap Motion Controller, sementara kelasnya adalah Controller.
Kelas Controller akan mendeklarasikan bahwa Leap Motion Controller akan digunakan pada skrip yang dituju. Dengan kelas Controller, dapat diperoleh data-data seperti terhubungnya alat Leap Motion Controller ke komputer, penggunaan kelas
Frame dan Gesture, dan sebagainya. Oleh karena itu, kelas ini dideklarasikan pada saat permulaan program.
Kelas Controller memiliki beberapa properti sebagai berikut.
1. Config: Mengembalikan objek Config untuk melakukan query terhadap sistem Leap Motion dalam informasi pengaturan.
2. Devices: Daftar dari alat Leap Motion Controller yang terhubung dan dapat dikenal. 3. HasFocus: Melaporkan apakah aplikasi yang sedang berjalan sebagai fokus
(foreground application) atau tidak.
4. Images: Kumpulan citra terbaru dari kamera Leap Motion.
20
2.2.5. Frame
Kelas Frame merupakan turunan dari kelas Controller. Kelas ini menerima masukan dari gerakan tangan dan jari dalam setiap frame pada saat program dijalankan. Kelas inilah yang nantinya digunakan dalam berbagai hal di antarmuka pemrograman aplikasi yang menggunakan Leap Motion Controller. Kelas Hand, Finger, dan Tool adalah turunan dari kelas ini.
Kelas Frame memiliki beberapa properti sebagai berikut.
1. CurrentFramesPerSecond: Mengembalikan estimasi frame per detik dari Leap Motion Controller dengan jenis data float.
2. Fingers: Daftar dari objek Finger yang terdeteksi dalam satu frame, diurutkan secara acak.
3. Hands: Daftar dari objek Hand yang terdeteksi dalam satu frame, diurutkan secara acak.
4. Id: Sebuah identitas (ID) unik untuk kelas Frame ini. 5. Images: Daftar citra-citra dari kamera Leap Motion.
6. InteractionBox: InteractionBox yang sedang berlangsung pada suatu frame. 7. Invalid: Mengembalikan sebuah objek invalid dari kelas Frame.
8. IsValid: Melapokan apakah instansi dari Frame valid atau tidak.
9. Pointables: Daftar dari objek Pointable (jari dan alat) yang terdeteksi dalam suatu
frame, diurutkan secara acak.
10.Serialize: Menuliskan object Frame sebagai sebuah byte string.
11.Timestamp: Waktu yang ditangkap frame dalam mikrodetik yang berlalu sejak Leap dimulai.
12.Tools: Daftar alat yang terdeteksi dalam suatu frame, diurutkan secara acak.
2.2.6. Finger
Dengan didukungnya oleh perkembangan Skeletal Tracking, Leap Motion Controller
dengan perkembangan tersebut, kelas Finger mendapat dukungan lebih untuk digunakan dalam antarmuka pemrograman aplikasinya.
Kelas Finger memiliki beberapa properti sebagai berikut. 1. Direction: Vektor dari arah jari menunjuk,
2. Frame: Kelas Frame yang berasosiasi dengan kelas ini. 3. Hand: Kelas Hand yang berasosiasi dengan kelas ini.
4. Id: Sebuah identitas (ID) unik untuk objek ini yang tetap bernilai sama saat melawati tiap frame berturut-turut selama jari masih teramati.
5. Invalid: Mengembalikan objek invalid.
6. IsExtended: Melaporkan apakah jari yang dimaksud sedang dalam postur memanjang atau tidak.
7. IsFinger: Melaporkan apakah benar yang diamati terdapat jari atau tidak.
8. IsTool: Melaporkan apakah yang diamati adalah sebuah alat yang sedang digenggam atau tidak.
9. IsValid: Melaporkan apakah yang diamati merupakan objek dari kelas Pointable
yang valid atau tidak.
10.Length: Estimasi panjang dari jari atau alat dalam milimeter.
11.StabilizedTipPosition: Posisi ujung yang stabil dari kelas Pointable yang dimaksud. 12.TimeVisible: Durasi dari jari yang terlihat oleh Leap Motion Controller dalam
satuan detik.
13.TipPosition: Posisi ujung jari dalam milimeter dari posisi asal Leap Motion.
14.TipVelocity: Laju perubahan jarak pada posisi ujung jari dalam satuan milimeter/ per detik.
22
Gambar 2.8. TipPosition dan Direction dari kelas Finger (Canneyt, 2013)
2.2.7. Hand
Dalam setiap frame program yang dijalankan, gerakan tangan akan diamati oleh perangkat Leap Motion Controller. Kelas Hand akan bertindak untuk menerima data dari pengamatan tersebut. Sama seperti kelas Finger, kelas ini juga mendapat perkembangan khusus sejak Skeletal Tracking diterapkan. Salah satu perkembangan pada kelas Hand adalah sebelumnya hanya menerima tangan tertutup atau terbuka, kini berganti menjadi kekuatan genggaman tangan yang menerima nilai mulai dari nol hingga satu. Selain itu, dengan kelas ini, Leap Motion Controller juga dapat membedakan tangan yang diamaati adalah tangan kanan atau kiri.
Kelas Hand memiliki beberapa properti sebagai berikut.
1. Arm: Lengan yang terhubung dengan tangan yang sedang diamati oleh Leap Motion Controller.
2. Basis: Orientasi tangan dengan basis matriks.
3. Confidence: Mengembalikan nilai kepastian dari 0.0 sampai 1.0 untuk pose tangan yang terlihat.
4. Direction: Arah dari telapak tangan yang menuju jemari.
6. Frame: Kelas Frame yang berasosiasi dengan kelas Hand ini.
7. GrabStrength: Nilai 0 sampai 1 untuk kekuatan genggaman tangan. Nilai 1 adalah saat tangan benar-benar tergenggam.
8. Id: Sebuah identitas (ID) unik untuk objek ini yang tetap bernilai sama saat melawati tiap frame berturut-turut selama jari masih teramati.
9. Invalid: Mengembalikan objek invalid dari kelas Hand.
10.IsLeft: Idetifikasi apakah tangan yang dimaksud adalah tangan kiri. 11.IsRight: Idetifikasi apakah tangan yang dimaksud adalah tangan kanan. 12.IsValid: Melaporkan objek dari kelas Hand adalah valid.
13.PalmNormal: Nilai normal vektor untuk telapak tangan.
14.PalmPosition: Posisi tengah telapak tangan dalam milimeter dari jarak awal Leap Motion.
15.PalmVelocity: Laju perubahan posisi telapak tangan dalam satuan milimeter per detik.
16.PalmWidth: Estimasi lebar dari telapak tangan dalam posisi mendatar.
17.PinchStrength: Nilai 0 sampai 1 untuk kekuatan jepitan tangan, minimal dengan dua jari. Nilai 1 adalah saat tangan benar-benar menjepit.
18.Pointables: Daftar dari objek kelas Pointable yang terdeteksi dalam suatu frame
yang berasosiasi dengan tangan yang dimaksud, diurutkan secara acak.
19.SphereCenter: Titik tengah dari sebuah bola yang terbentuk sesuai dengan lengkungan tangan. Saat telapak tangan melengkung dengan jemarinya, tangan membuat sebuah pose seolah sedang memegang sebuah bola. Ukuran bola ini akan disesuaikan dengan pose tangan tersebut.
20.SphereRadius: Jari-jari atau radius dari bola yang terbentuk sesuai dengan lengkungan tangan.
21.StabilizedPalmPosition: Posisi telapak tangan yang stabil dari kelas Hand yang dimaksud.
22.TimeVisible: Durasi dari tangan yang terlihat oleh Leap Motion Controller dalam satuan detik.
24
2.2.8. Gesture
Selain gerakan tangan dan jari seperti menggenggam dan meregangkan jari, Leap Motion Controller juga memiliki gerakan-gerakan khusus yang dapat diamati apabila terjadi dalam suatu frame. Data dari gerakan-gerakan khusus yang disebut dengan
gesture ini diterima oleh kelas Gesture. Kelas ini dapat diaktifkan melalui kelas
Controller.
Ada empat jenis gesture yang dapat diterima oleh kelas Gesture, yaitu Circle Gesture, Key Tap Gesture, Swipe Gesture, dan Screen Tap Gesture. Circle Gesture
adalah gerakan tangan khusus yang berputar di hadapan Leap Motion Controller searah
roll axis. Gesture ini memiliki dua jenis parameter yaitu jari-jari minimal dan sudut minimal. Apabila kedua parameter ini terpenuhi maka sistem akan menyatakan bahwa pengguna sedang melakukan Circle Gesture.
Gambar 2.9. Contoh penggunaan Circle Gesture dengan ujung jari
(Leap Motion, 2014)
tersebut maka sistem akan menyatakan bahwa pengguna sedang melakukan Swipe Gesture.
Gambar 2.10. Contoh penggunaan Swipe Gesture (Leap Motion, 2014)
26
Gambar 2.11. Contoh penggunaan Screen Tap Gesture (Leap Motion, 2014)
Key Tap Gesture adalah gerakan jari seperti sedang menekan tombol di udara. Untuk melakukan Key Tap Gesture, jari tidak hanya bergerak ke bawah, tetapi juga harus segara diangkat. Key Tap Gesture memiliki tiga parameter yaitu kecepatan saat turun, durasi jari sebelum diangkat, dan jarak minimum.
Untuk memudahkan pengguna dalam mempraktikkan berbagai gesture yang disediakan oleh Leap Motion Controller, terdapat konfigurasi khusus untuk gesture. Konfigurasi ini bergantung kepada key string dari masing-masing gesture. Sama seperti kelas Gesture, kelas Config untuk konfigurasi gesture juga merupakan turunan dari kelas Controller. Pada tabel 2.1 dapat dilihat konfigurasi pada masing-masing gesture.
TABEL 2.1. Konfigurasi Key String pada Gesture
Key string Jenis Data Default Value Satuan
Gesture.Circle.MinRadius float 5 mm
Gesture.Circle.MinArc float 1.5 * pi radians
Gesture.KeyTap.MinDownVelocity float 50 mm/s
Gesture.KeyTap.HistorySeconds float 0.1 s
Gesture.KeyTap.MinDistance float 3 mm
Gesture.Swipe.MinLength float 150 mm
Gesture.Swipe.MinVelocity float 1000 mm/s
Gesture.ScreenTap.MinForwardVelocity float 50 mm/s
Gesture.ScreenTap.HistorySeconds float 0.1 s
Gesture.ScreenTap.MinDistance float 5 mm
2.2.9. Tool
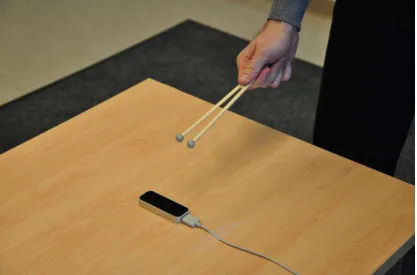
Tidak hanya tangan kosong, Leap Motion Controller juga dapat menerima data dari objek yang digenggam oleh tangan saat diamati. Data ini diterima oleh kelas Tool. Objek yang digenggam oleh tangan saat diamati oleh Leap Motion Controller tidak akan ditampilkan secara persis dan berdimensi tiga oleh tampilan antarmuka meskipun
28
Kelas Tool dapat menggunakan beberapa properti yang sama dengan kelas
Finger. Karena keduanya merupakan objek dari kelas Pointable. Karena itulah terdapat properti isTool dan isFinger untuk membedakan objek dari kelas Pointable mana yang sedang digunakan.
Gambar 2.13. Penggenggaman alat berbentuk V untuk pengukuran dinamis
(Guna, et al. 2014)
2.3. Gestur
Gestur merupakan suatu gerakan statis maupun dinamis yang digunakan sebagai sarana komunikasi antara manusia dengan mesin dan begitu juga dengan sesama manusia yang menggunakan bahasa isyarat (Khan, et al. 2012). Gestur statis adalah suatu keadaan diam bagian tubuh atau pose. Sementara gestur dinamis adalah kumpulan dari beberapa gestur statis tersebut dalam suatu rangkaian gerakan.
Beberapa gestur yang sering digunakan adalah sebagai berikut (Anjani, 2013). 1. Incidental Gestures adalah suatu tindakan yang digunakan sebagai pesai kedua selain diakibatkan oleh faktor mekanik tubuh. Seperti menguap bukan hanya berarti mengantuk tetapi juga dapat berarti perasaan jenuh atau bosan.
3. Mimic Gestures adalah gesture yang menyampaikan sinyal melalui imitasi. Seperti meminta makan atau minum.
4. Schematic Gestures merupakan imitasi yang disingkat. Seperti mengisyarakatkan setan dengan meletakkan tangan di atas kepala dengan jari telunjuk seperti tanduk. 5. Symbolic Gestures adalah gestur yang mewakilkan suasana dan ide. Gestur ini
dipengaruhi oleh kebudayaan.
6. Technical Gestures merupakan gestur yang digunakan oleh kalangan tertentu. Seperti gerakan-gerakan yang digunakan pada saat pesawat mendarat.
BAB 3
ANALISIS DAN PERANCANGAN
Bab ini membahas tentang implementasi alat Leap Motion Controller pada sistem anatomi manusia berdimensi tiga. Bab ini juga membahas tentang arsitektur umum sistem yang dibangun.
3.1. Arsitektur Umum
Gambar 3.1. Arsitektur umum sistem yang diajukan
3.2. Anatomi Berdimensi Tiga
Objek anatomi yang digunakan pada penelitian ini merupakan file objek berdimensi tiga dengan ekstensi *.obj. Objek-objek anatomi berdimensi tiga tersebut berasal dari
32
Gambar 3.2. Susunan anatomi rangka tulang manusia dari BodyParts3D
3.3. Pengamatan Gerakan Tangan dan Jari
Hasil dari pengamatan gerakan-gerakan tangan dan jari yang diamati ini berupa data yang diproses dalam engine Unity. Unity bertindak sebagai engine yang menggabungkan model berdimensi tiga dengan bahasa pemrograman untuk menjalankan program yang menggunakan Leap Motion Controller. Unity akan menerima data-data tersebut dan menjalankannya sesuai dengan kodenya masing-masing. Contoh data-data hasil pengamatan yang digunakan pada Unity dapat dilihat pada Gambar 3.3.
Gambar 3.3. Data-data yang berasal dari pengamatan gerakan tangan dan jari
34
1. Circle Gesture oleh tangan kiri digunakan untuk menggerakan kamera dalam suatu orbit revolusi di mana objek anatomi adalah titik tengahnya.
2. Swipe Gesture oleh tangan kiri digunakan untuk menggerakkan kamera secara vertikal.
3. Penggenggaman tangan kiri diikuti gerakan maju ataupun mundur digunakan untuk melakukan perbesaran ataupun pengecilan wilayah pandangan kamera.
4. Penunjukan objek anatomi oleh jari telunjuk tangan kanan digunakan untuk menampilkan nama objek anatomi tersebut.
Dalam penggunaan Circle Gesture, kamera akan melakukan perpindahan terhadap sumbu x dan z sekaligus, namun tetap menghadap ke objek anatomi. Dengan menempatkan objek anatomi pada koordinat (0, 0, 0) maka pandangan kamera dapat menuju pada koordinat (0, posisi kamera y, 0). Di mana posisi kamera y adalah posisi kamera pada sumbu y yang akan terus berubah seiring karena Swipe Gesture yang digunakan.
Pergerakan koordinat kamera menggunakan rumus sudut terhadap sisi miring. Di mana dalam hal ini, sisi miring adalah jari-jari orbit revolusi kamera. Untuk mendapatkan posisi kamera terhadap sumbu x digunakan persamaan (3.1).
= � × cos � (3.1)
Di mana adalah posisi kamera terhadap sumbu x, � adalah jari-jari atau jarak awal kamera dengan objek anatomi, dan � adalah derajat yang diperoleh dari gerakan
Circle Gesture. Sementara untuk mendapatkan posisi kamera terhadap sumbu z cukup dilakukan dengan menggantikan perkalian cosinus dengan sinus pada persamaan (3.1). Untuk lebih jelasnya dapat dilihat pada persamaan (3.2).
= � × sin � (3.2)
Penggenggaman tangan kiri yang diikuti arah maju atau mundur akan memicu wilayah pandangan kamera. Genggaman tangan ini menggunakan properti
GrabStrength dari kelas Hand. Dalam hal ini, perpidahan tangan kiri yang tergenggam menjauhi pengguna secara maju akan memperbesar nilai wilayah pandangan kamera sehingga objek anatomi akan tampak semakin kecil, begitu juga hal sebaliknya. Perubahan wilayah pandang kamera ini akan mengganggu ukuran skala Leap Motion Controller dalam sistem. Oleh karena itu, digunakan rumus perubahan skala dalam
Di mana dapat disebutkan sebagai nilai wilayah pandang kamera, 0 adalah nilai terkecil dari wilayah pandang kamera, dan � adalah nilai terbesar dari wilayah pandang kamera. Begitu juga hal yang sama diterapkan pada skala Leap Motion Controller. Nilai akhir dari rumus ini adalah yang merupakan skala Leap Motion Controller yang sesuai dengan wilayah pandang kamera pada waktu yang sama.
Seluruh pergerakan kamera diletakkan pada tangan kiri dengan properti IsLeft
dari kelas Hand. Hal ini dimaksudkan agar pengguna dapat leluasa menunjuk objek anatomi tanpa harus terganggu oleh pergerakan kamera. Oleh karena itulah, gerakan menunjuk objek anatomi menggunakan tangan kanan. Kelas Finger pada saat yang sama akan memeriksa apakah jari sudah lurus seperti dalam keadaan menunjuk atau tidak. Serta kelas FingerList akan memeriksa apakah jari tersebut adalah jari telunjuk terlebih dahulu.
36
Gambar 3.4.Diagram alir seluruh proses pada sistem
3.4. Penamaan Objek Anatomi
penamaan objek anatomi yang digunakan dan terdaftar pada Lampiran A. Dalam buku ini diguanakan bahasa Latin untuk penyebutan bagian anatomi.
Sesuai dengan batasan masalah penelitian, model anatomi manusia yang digunakan hanya pada bagian Passive Locomotor System, Skeleton. Penamaan bagian tersebut terdapat pada buku Sobotta halaman ke-6. Daftar objek anatomi yang digunakan berserta penamaannya yang berdasarkan pada buku Sobotta dapat dilihat pada Lampiran B.
BAB 4
IMPLEMENTASI DAN PENGUJIAN
Bab ini membahas hasil yang didapatkan dari implementasi alat Leap Motion Controller
pada sistem anatomi manusia berdimensi tiga, sesuai dengan penerapan yang dibahas pada Bab 3 serta melakukan pengujian sistem yang telah dibangun.
4.1. Implementasi Sistem
Pada bagian ini, alat Leap Motion Controller akan diimplementasikan ke dalam sistem dengan menggunakan bahasa pemrograman C# dan engine bernama Unity sesuai perancangan yang telah dilakukan.
4.1.1. Spesifikasi Perangkat Keras dan Lunak yang Digunakan
Dalam pembuatannya, dibutuhkan beberapa perangkat keras dan perangkat lunak tertentu yang kompatibel sehingga sistem dapat dibangun sesuai dengan perancangan yang telah ditentukan. Spesifikasi perangkat keras dan perangkat lunak yang digunakan untuk membangun sistem ini adalah sebagai berikut:
1. Prosesor Intel®CoreTM i3-M330 CPU 2.13 GHz.
2. Kapasitas hardisk 500 GB.
3. Memori RAM yang digunakan 6 GB.
4. VGA card yang digunakan adalah NVIDIA® GeForce® G310M 512MB. 5. Sistem operasi yang digunakan adalah Microsoft Windows 7 Home Premium. 6. Perangkat lunak Leap Motion yang digunakan versi 2.2.7+30199.
4.1.2. Implementasi Perancangan Antarmuka
Implementasi perancangan antarmuka yang telah diterapkan pada sistem adalah: a. Start Scene
Start Scene merupakan tampilan awal saat sistem dijalankan. Pada scene ini ditampilkan judul sistem, pembuat sistem, dan antarmuka untuk memulai sistem.
Scene ini dikendalikan oleh Leap Motion Controller dan beberapa tombol keyboard
yang umumnya digunakan untuk berbagai aplikasi sesuai dengan sistem operasi yang digunakan.
Gambar 4.1. Start Scene
b. Loading image
Sebelum menuju scene berikutnya, dibutuhkan beberapa waktu oleh sistem untuk mengisi scene tersebut. Dalam pengisiannya, sistem akan terlihat diam dalam kurun waktu berkisar satu sampai dengan dua menit. Untuk itu, ditampilkan sebuah
40
Gambar 4.2. Loading image
c. Main Scene
Pada Main Scene ditampilkan susunan anatomi tubuh manusia bagian rangka tulang. Scene ini adalah bagian terpenting pada sistem karena seluruh bagian anatomi yang ditampilkan terdapat pada scene ini. Dalam Main Scene terdapat beberapa fitur. Di antaranya adalah zoom mode, rotate mode, dan tampilan nama objek anatomi.
Zoom mode adalah fitur pada sistem yang mempengaruhi wilayah pandang kamera. Wilayah pandang kamera yang kecil akan menampilkan objek anatomi dalam ukuran besar, begitu juga sebaliknya, wilayah pandang kamera yang besar akan menampilkan objek anatomi dalam ukuran kecil. Dengan melakukan pengubahan ukuran objek anatomi, pengguna dapat lebih leluasa mengamati dan juga menunjuk objek anatomi untuk ditampilkan namanya. Zoom mode dilakukan dengan cara melakukan penggenggaman tangan kiri kemudian gerakan maju yang akan mengecilkan tampilan objek anatomi (zoom out), begitu juga gerakan tangan kiri yang tergenggam kemudian mundur akan memperbesar tampilan objek anatomi (zoom in). Gerakan ini dapat disebut dengan gestur menggenggam.
Gambar 4.4. Zoom Mode
42
Gambar 4.5. Rotate Mode
Fitur pergerakan kamera yang terakhir adalah dengan melakukan gerakan tangan kiri searah vertikal dengan kecepatan tertentu atau dapat disebut dengan gestur swipe. Cara terbaik menggunakan fitur ini adalah dengan membuka telapak tangan agar sistem tidak keliru melakukan pergerakan kamera searah vertikal atau melakukan pengubahan wilayah pandang kamera. Selain itu gerakan tangan juga harus tetap lurus searah vertikal agar system tidak keliru dengan fitur rotate mode.
Penampilan nama objek anatomi dilakukan dengan penunjukan objek anatomi berdimensi tiga pada sistem oleh jari telunjuk tangan kanan. Fitur ini menggunakan tangan yang berbeda dengan fitur-fitur sebelumnya untuk menghindari pergerakan kamera yang tidak diinginkan saat objek anatomi ditunjuk. Gestur untuk penampilan nama objek anatomi ini disebut dengan gestur menunjuk.
Gambar 4.7. Penampilan nama objek anatomi
4.2. Pengujian Sistem
Pengujian sistem dilakukan pada sistem agar dapat diketahui tercapainya tujuan sistem yakni untuk menggunakan Leap Motion Controller sebagai alat bantu untuk sistem pengenalan anatomi manusia berdimensi tiga. Pengujian fungsional dari fitur-fitur yang diterapkan dilakukan dengan menggunakan metode black box atau kotak hitam (Yowanda, et al. 2011).
4.2.1. Rencana Pengujian Sistem
44
Tabel 4.1. Rencana Pengujian
No. Komponen sistem yang diuji Butir Uji
1 Start Scene Penggenggaman objek Start
2 Main Scene Penggenggaman dengan tangan kiri
Perputaran telapak tangan kiri Pergerakan telapak tangan kiri dengan arah vertikal
Penunjukan objek anatomi dengan tangan kanan
4.2.2. Kasus dan Hasil Pengujian Sistem
Kasus pengujian sistem yang dibangun menggunakan metode Black Box berdasarkan rencana pengujian pada Tabel 4.1 dapat terlihat pada Tabel 4.2 berikut.
Tabel 4.2. Hasil Pengujian
No.
Komponen
sistem yang
diuji
Skenario uji Hasil yang diharapkan Hasil pengujian
1. Start Scene Penggenggaman
objek Start
Jika pengguna
menggenggam objek Start
dengan tangan berdimensi tiga, sistem akan menampilkan main scene
dan selama pengisiannya ditampilkan loading image
berupa instruksi bantuan dalam penggunaan main scene.
2 Main Scene melakukan gerakan maju, wilayah pandangan kamera akan membesar sehingga objek anatomi akan terlihat mengecil. Begitu juga sebaliknya, jika gerakan genggaman tangan kiri mundur, wilayah pandang kamera akan mengecil sehingga objek anatomi akan terlihat membesar. objek anatomi seluruhnya akan juga berputar searah jarum jam. Begitu juga sebaliknya, objek anatomi seluruhnya akan berputar berlawanan arah jarum jam jika telapak berputar berlawanan dengan arah jarum jam.
46
Tabel 4.2. Hasil Pengujian (lanjutan)
No.
Komponen sistem yang
diuji
Skenario uji Hasil yang diharapkan Hasil pengujian akan bergerak ke atas. Jika telapak tangan kiri kanan pengguna menunjuk objek anatomi berdimensi tiga, sistem akan menampilkan nama dari objek anatomi yang ditunjuk serta objek tersebut akan berubah warna menjadi hijau.
Berhasil
Adapun pernyataan-pernyataan dalam jajak pendapat tersebut untuk tingkat kesetujuan interaksi dan gestur adalah sebagai berikut.
1. Anatomi manusia berdimensi tiga menggunakan Leap Motion Controller sangat interaktif.
2. Saya mudah mempelajari gestur-gestur yang ada.
3. Gerakan tangan di dalam layar sesuai dengan gerakan tangan saya. 4. Kamera bergerak sesuai dengan gestur yang saya gunakan.
5. Nama objek anatomi muncul saat saya menunjuknya dan warnanya berubah menjadi hijau.
6. Gestur menggenggam pantas untuk digunakan sebagai pengubahan wilayah pandang kamera (zoom in/out).
7. Gestur swipe secara vertikal pantas untuk digunakan perpindahan kamera.
8. Gestur perputaran pergelangan tangan pantas untuk digunakan perputaran kamera mengelilingi objek anatomi.
9. Gestur menunjuk pantas untuk menampilkan nama objek anatomi.
Dan pernyataan-pernyataan untuk tingkat kepuasan pengguna adalah sebagai berikut. 1. Saya puas dengan gestur menggenggam tangan kiri diikuti gerakan maju atau
mundur untuk pengubahan wilayah pandang kamera.
2. Saya puas dengan gestur perputaran pergelangan tangan kiri untuk perputaran kamera mengelilingi objek anatomi.
3. Saya puas dengan gestur swipe secara vertikal untuk menggerakan kamera dengan arah vertikal.
4. Saya puas dengan gestur penunjukan oleh jari telunjuk tangan kanan untuk menampilkan nama objek anatomi.
5. Saya puas mencoba anatomi manusia berdimensi tiga menggunakan Leap Motion Controller.
48
Tabel 4.3. Skala Likert pada Kuesioner
Skala Kesetujuan Skala Kepuasan Nilai
Sangat Tidak Setuju (STS) Sangat Tidak Puas (STP) 1
Tidak Setuju (TS) Tidak Puas (TP) 2
Kurang Setuju (KS) Kurang Puas (KP) 3
Setuju (S) Puas (P) 4
Sangat Setuju (SS) Sangan Puas (SP) 5
Skala pada Tabel 4.3. tersebut digunakan sebagai acuan untuk menjadi jawaban atas pernyataan-pernyataan yang ada pada Tabel 4.4. dan Tabel 4.5. Di mana pada Tabel 4.4. merupakan kuesioner untuk tingkat kesetujuan interaksi dan gestur. Pada tabel ini lebih mengacu kepada pertanyaan seputar kepantasan gestur-gestur yang terdapat dalam sistem.
Tabel 4.4. Kuesioner Tingkat Kesetujuan Interaksi dan Gestur
Pernyataan Jawaban
STS TS KS S SS
Anatomi manusia
berdimensi tiga
menggunakan Leap Motion Controller sangat interaktif. Saya mudah mempelajari gestur-gestur yang ada. Gerakan tangan di dalam layar sesuai dengan gerakan tangan saya.
Tabel 4.4. Kuesioner Tingkat Kesetujuan Interaksi dan Gestur (lanjutan)
Pernyataan Jawaban
STS TS KS S SS
Gestur perputaran pergelangan tangan pantas untuk digunakan perputaran kamera mengelilingi objek anatomi.
Gestur menunjuk pantas untuk menampilkan nama objek anatomi.
Gestur swipe secara vertikal pantas untuk digunakan perpindahan kamera.
Tabel 4.5 adalah tabel kuesioner untuk tingkat kepuasan pengguna. Tabel ini mengacu kepada kepuasan pengguna terhadap gestur yang telah digunakan oleh pengguna. Kepuasaan pengguna bergantung pada lancar atau tidaknya sistem pada saat digunakan. Berbeda dengan kuesioner pada Tabel 4.4. yang lebih mengacu kepada setuju atau tidaknya pengguna terhadap pantasnya gestur yang digunakan sebagai fitur kendali pada sistem.
Tabel 4.5. Kuesioner Tingkat Kepuasan Pengguna
Pernyataan Jawaban
STP TP KP P SP
Saya puas dengan gestur menggenggam tangan kiri diikuti gerakan maju atau mundur untuk pengubahan wilayah pandang kamera. Saya puas dengan gestur perputaran pergelangan tangan kiri untuk perputaran kamera mengelilingi objek anatomi.
Saya puas dengan gestur
50
Tabel 4.5. Kuesioner Tingkat Kepuasan Pengguna (lanjutan)
Pernyataan Jawaban
STP TP KP P SP
Saya puas dengan gestur penunjukan oleh jari telunjuk tangan kanan untuk menampilkan nama objek anatomi.
Saya puas mencoba
Anatomi manusia
berdimensi tiga
menggunakan Leap Motion Controller.
Dari nilai-nilai dalam skala tersebut dapat diperoleh nilai rata-rata dari tiap-tiap pertanyaan dengan menjumlahkan seluruh nilai pada masing-masing pertanyaan kemudian dibagikan dengan jumlah responden. Nilai rata-rata dari masing-masing pernyataan pada tingkat kesetujuan interaksi dan gestur dapat dilihat pada Gambar 4.8. Sementara untuk nilai rata-rata dari masing-masing pernyataan pada tingkat kepuasaan pengguna dapat dilihat pada Gambar 4.9.
Gambar 4.8. Grafik Tingkat Kesetujuan Interaksi dan Gestur
merupakan teknologi baru sehingga masih ada yang mendapati alat ini kurang mudah untuk dipelajari. Kesesuai gerakan tangan pada layar juga tidak sepenuhnya disetujui pengguna yang dapat dilihat pada nilai rata-rata sebesar 3,93. Sementara untuk pernyataan selanjutnya disetujui oleh pengguna dengan nilai rata-rata di atas 4 untuk gerakan kamera yang sesuai dengan gestur dan tampilnya nama objek saat ditunjuk, serta pantasnya tiap-tiap gestur untuk digunakan pada sistem sesuai dengan fiturnya masing-masing.
Gambar 4.9. Grafik Tingkat Kesetujuan Interaksi dan Gestur
52
4.3. Keterbatasan Leap Motion Controller
Selama masa pembuatan dan pengujian sistem, penulis mendapatkan beberapa keterbasan dalam penggunaan Leap Motion Controller. Keterbatasan yang pertama adalah Leap Motion Controller tidak dapat berfungsi dengan baik pada ruangan dengan intensitas cahaya yang tinggi, seperti contohnya pada ruangan yang tidak menutup dari sinar matahari dan jarak sumber cahaya yang terlalu dekat dengan Leap Motion Controller.
Untuk mengatasi keterbatasan di ruangan dengan cahaya yang cerah, Leap Motion Controller memiliki fungsi bernama Robust Mode yang berfungsi untuk menghasilkan pengamatan yang lebih baik di lokasi dengan cahaya yang cerah. Akan tetapi, Robust Mode tidak selamanya berfungsi dengan baik. Bahkan, pengamatan tangan dapat terhenti sewaktu-waktu dan terjadi kekeliruan pada sistem dengan alat bantu kendali Leap Motion Controller. Sehingga dalam mengatasi hal ini dibutuhkan pemberhentian dan pemulaian secara manual pada Leap Motion Controller atau dapat juga dengan melakukan restart pada komputer yang digunakan.
BAB 5
KESIMPULAN DAN SARAN
Bab ini membahas tentang kesimpulan yang didapat berdasarkan hasil penelitian mengenai anatomi manusia berdimensi tiga menggunakan Leap Motion Controller, serta saran-saran untuk pengembangan penelitian selanjutnya.
5.1. Kesimpulan
Berdasarkan hasil penelitian anatomi manusia berdimensi tiga menggunakan Leap Motion Controller, didapatkan beberapa kesimpulan yakni:
1. Leap Motion Controller dapat digunakan sebagai alat bantu untuk sistem pengenalan anatomi manusia berdimensi tiga.
2. Dengan nilai rata-rata sebesar 4,13 dalam skala Likert, pengguna setuju bahwa anatomi manusia berdimensi tiga menggunakan Leap Motion Controller adalah sistem yang sangat interaktif.
3. Dengan nilai rata-rata sebesar 3,9 dalam skala Likert, pengguna setuju untuk merasa mudah mempelajari gestur-gestur dan fitur-fitur yang disediakan oleh anatomi manusia berdimensi tiga menggunakan Leap Motion Controller. Hal ini sebanding dengan tingkat kesetujuan pengguna yang hampir seluruhnya menyetujui bahwa gerakan tangan yang ditampilkan sistem sesuai dengan gerakan tangannnya.
54
5. Dengan nilai rata-rata paling rendah 3,7 dalam skala Likert, pengguna puas saat menggunakan gestur-gestur yang terdapat pada sistem. Hal ini sebanding dengan tingkat kesejuan pengguna di mana tidak seluruhnya setuju bahwa gestur-gestur pada sistem mudah untuk dipelajari. Meskipun begitu, rata-rata seluruh pengguna puas mencoba anatomi manusia berdimensi tiga menggunakan Leap Motion Controller.
5.2. Saran
Pada penelitian selanjutnya, diharapkan adanya penelitian yang mampu meningkat presisi dari alat Leap Motion Controller. Sehingga saat digunakan, tampilan gerakan dapat lebih sesuai dengan gerakan pengguna. Kesesuaian gerakan tangan pengguna dengan tangan berdimensi tiga yang ditampilkan oleh sistem dapat membantu tingkat kemudahan mempelajari gestur-gestur yang terdapat pada sistem. Selain itu, hal-hal mendetail dari ilmu anatomi juga dapat dikembangkan secara terbagi-bagi berdasarkan organ-organ tubuh lainnya. Sehingga penamaan anatomi manusia yang menggunakan
DAFTAR PUSTAKA
Anjani, J. 2013. Program Desain Komunikasi Visual pada Desain Alternatif pada Buku Canons Series: Proverbs. Universitas Pelita Harapan.
Benly, P. 2014. Teaching methodologies on anatomy - A Review. J Pharm Sci & Res. 6(6): 242-243.
BodyParts3D.2013. The Database Center for Life Science licensed by CC Attribution-Share Alike 2.1 apan. ftp://202.223.160.84/archive/bodyparts3d/20130619/ (diakses 16 Februari 2015).
Canneyt, M. 2013. Programming with the Leap Motion.
Gray, H. 1918. Anatomy of the Human Body. http://www.bartleby.com/107/1.html (diakses 19 Juni 2015).
Guna, J., Jakus, G., Pogačnik, M., Tomažič, S., Sodnik, J. 2014. An Analysis of the Precision and Reliability of the Leap Motion Sensor and Its Suitability for Static and Dynamic Tracking. Sensors, 14: 3702-3720
Hagens, G. 2002. Anatomy and Plastination.
Hoyek, N., Collet, C., Guillot A. 2011. Experimental Research Validation for the Use of 3D in Teaching Human Anatomy. Université Lyon 1.
Ivanova, A., Holomanova, A. 2001. The anatomic nomenclature by Vesalius. Bratisl Lek Listy 102 (3): 169-173.
Khan, R. & Ibraheem, N. 2012. Hand Gesture Recognition: A Literature Review.
International Journal of Artificial Inteligence & Applications (IJAIA), Vol.3,
No.4.