PERANCANGAN HARDWARE ROBOT AVOIDER MENGGUNAKAN SENSOR SHARP GP2D12 DAN INFRAMERAH BERBASIS
MIKROKONTROLER ATMEGA8535
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh Ahli Madya
TUGAS AKHIR
SENTOT PUJA HARSENO 052408090
PROGRAM STUDI D3 FISIKA INSTRUMENTASI DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
MEDAN 2008
PERSETUJUAN
Judul : PERANCANGAN HARDWARE ROBOT AVOIDER MENGGUNAKAN SENSOR SHARP GP2D12 DAN INFRA MERAH BERBASIS MIKROKONTROLER ATMEGA8535
Kategori : TUGAS AKHIR
Nama : SENTOT PUJA HARSENO
Nomor Induk Mahasiswa : 052408090
Program Studi : DIPLOMA III FISIKA INSTRUMENTASI
Departemen : FISIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN
ALAM (FMIPA) UNIVERSITAS SUMATERA UTARA
Diluluskan di Medan,
Diketahui/Disetujui oleh
Departemen Fisika FMIPA USU Pembimbing, Ketua,
(Drs. Syahrul Humaidi, M.Sc) (Drs. Ansharuddin,STT) NIP. 132 050 870 NIP. 131 803 949
iii
PERNYATAAN
PERANCANGAN HARDWARE ROBOT AVOIDER MENGGUNAKAN SENSOR SHARP GP2D12 DAN INFRAMERAH BERBASIS MIKROKONTROLER
ATMEGA8535
TUGAS AKHIR
Saya mengakui bahwa tugas akhir ini adalah hasil karya saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing – masing disebutkan sumbernya.
Medan, Juli 2008
SENTOT PUJA HARSENO 052408090
PENGHARGAAN
Puji dan syukur penulis panjatkan kepada ALLAH SWT Yang Maha Pemurah dan Maha Penyayang, dengan limpah kurnia-Nya kertas kajian ini berhasil diselesaikan dalam waktu yang ditetapkan.
Pada kesempatan ini penulis menyampaikan ucapan terimah kasih kepada: Bapak Drs. Ansharuddin,STT selaku dosen pembimbing pada penyelesaian tugas akhir ini yang telah memberikan panduan dan penuh kepercayaan kepada saya untuk menyempurnakan kajian ini. Ucapan terima kasih juga ditujukan kepada Ketua dan Sekretaris Departemen Fisika Bapak DR. Marhaposan Situmorang dan Ibu Dra. Justinon, Msi, Dekan dan Pembantu Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara, Semua dosen dan pegawai di FMIPA USU serta rekan – rekan FIN stambuk 2005, khususnya Adek Ayu dan anak – anak Wong nDeso Community, LALA, Sobat Ponsel Community, Wized yang telah membantu dan memberikan semangat pada penulis untuk menyelesaikan Laporan Tugas Akhir ini.
Ucapan terima kasih yang tidak terhinggga untuk kedua orang tua atas do’a, kasih sayang serta bantuan yang berupa materi maupun non materi yang telah diberikan pada penulis selama ini, serta seluruh keluarga yang telah banyak membantu, memberi dukungan kepada penulis dalam penyelesaian tugas akhir ini. Serta orang – orang yang tidak bisa penulis sebutkan satu persatu, Semoga ALLAH SWT membalasnya.
Penulis menyadari dalam laporan ini terdapat kekurangan baik secara materi maupun penyajiannya. Untuk itu penulis mengharapkan kritik dan saran yang bersifat membangun untuk kesempurnaan Laporan Tugas Akhir ini. Akhir kata penulis ucapkan banyak terima kasih kepada pihak yang telah memberikan bantuan. Semoga laporan ini bermanfaat bagi pembaca.
xi
DAFTAR GAMBAR
Halaman
Gambar 2.1 Blok diagram sistem pengendali atau intrumentasi elektronik 8
Gambar 2.2 Rangkaian limit switch dengan buffer 14
Gambar 2.3 Rangkaian sensor temperature 15
Gambar 2.4 Rangkaian sensor infra merah TX-RX 15
Gambar 2.5 Rangkaian sensor ultrasonik TX-RX 16
Gambar 2.6 Potensiometer sebagai sensor posisi 17
Gambar 2.7 θ vs Vout 18
Gambar 2.8 Sharp GP2D12 19
Gambar 2.9 Sharp GP2D02 19
Gambar 2.10 Inverting Amplifier 21
Gambar 2.11 Non Inverting Amplifier 22
Gambar 2.12 Low Pass Filter 1-Pole 23
Gambar 2.13 Rangkaian Low Pass Filter 2-Pole Bessel 23
Gambar 2.14 Rangkaian High Pass Filter 1-Pole 24
Gambar 2.15 Rangkaian High Pass Filter 2-Pole Bessel 24
Gambar 2.16 Rangkaian Dasar revers Photodioda 27
Gambar 2.17 Grafik hubungan kuat arus terhadap terang cahaya photodiode 27
Gambar 3.1 Blok diagram rancangan system 28
Gambar 3.2 Rangkaian skematik system minimum
Mikrokontroler ATMega8535 29
Gambar 3.3 Rangkaian skematik Power Supply 30
Gambar 3.4 Prinsip Triangulasi pada sensor SHARP GP2D12 32
Gambar 3.5 Bentuk fisik dari SHARP GP2D12 dengan kabel penghubungnya 33
Gambar 3.6 Karakteristik tegangan output dari SHARP GP2D12 33
Gambar 3.7 Rangkaian Pengkondisi Sinyal Inframerah 34
Gambar 3.8 Diagram Blok H-Bridge L298 35
Gambar 3.9 Flowchart Program 37
Gambar 4.1 Rangkaian SHARP GP2D12 39
Gambar 4.2 Pengkondisi sinyal sederhana dan lebih baik 41
Gambar 4.3 Diagram blok H-Bridge L298 42
Gambar 4.4 Informasi signature mikrokontroler 44
x
DAFTAR TABEL
Halaman
Tabel 2.1 Jenis-jenis Transducer Resistif 9
Tabel 2.2 Jenis-jenis Transducer Kapasitif dan Induktif 10
Tabel 2.3 Jenis-jenis Transducer photo 11
Tabel 2.4 Jenis-jenis Transducer aktif 12
Tabel 2.5 Klasifikasi sensor berdasarkan tipe output 13
Tabel 3.1 Tabel Kebenaran Diagram Blok H-Bridge L298 36
Tabel 4.1 Perubahan tegangan keluaran sensor SHARP GP2D12 40
terhadap jarak
Tabel 4.2 Tabel Kebenaran Diagram Blok H-Bridge L298 43
ABSTRAK
Robot adalah suatu sistem yang memiliki kemampuan untuk mengindera lingkungan sekitarnya dan melakukan tanggapan yang sesuai dengan tingkat kecerdasan buatan yang ditanamkan kepadanya. Penginderaan pada robot ini membutuhkan sensor/transducer untuk mengubah besaran fisis menjadi sinyal listrik. Sensor/transducer ini terdiri dari berbagai jenis sesuai dengan fungsinya. Pada robot avoider yang bersistem AMR (autonomous mobile robot) dibutuhkan sensor yang dapat mengindera besaran fisis yang ada, seperti jarak (halangan), infra merah dan suara (sebagai sinyal start). Sensor yang ada bekerja menggunakan rangkaian penguat dan pengkondisi sinyal yang sesuai dengan karakteristik dari masing-masing sensor kemudian mengubahnya menjadi level tegangan digital ataupun analog yang stabil dan dapat diproses oleh mikrokontroler pada robot.
vi
ABSTRACT
Robot is an integration of complex system that have capability to sense the environment around and give the correct respond based on the implemented artificial intelligence. The sensing capability of the robot need transducer/sensor to apply it, this transducer/sensor is functioning as instrument that convert physical matter into electrical signal. Sensor/transducer have many function depend on the kind. In this firefighting robot which have AMR (autonomous mobile robot) system applied needs sensor/transducer which can sense any physical matter, like distance (proximity sensing), infra-red. Every sensor/transducer work with amplifier circuit and signal conditioning circuit wisely to the characteristics from every sensor to convert into stable digital signal or analog signal and then it will sent to ADC (Analog to Digital Converter) and microcontroller unit in the robot system.
ABSTRAK
Robot adalah suatu sistem yang memiliki kemampuan untuk mengindera lingkungan sekitarnya dan melakukan tanggapan yang sesuai dengan tingkat kecerdasan buatan yang ditanamkan kepadanya. Penginderaan pada robot ini membutuhkan sensor/transducer untuk mengubah besaran fisis menjadi sinyal listrik. Sensor/transducer ini terdiri dari berbagai jenis sesuai dengan fungsinya. Pada robot avoider yang bersistem AMR (autonomous mobile robot) dibutuhkan sensor yang dapat mengindera besaran fisis yang ada, seperti jarak (halangan), infra merah dan suara (sebagai sinyal start). Sensor yang ada bekerja menggunakan rangkaian penguat dan pengkondisi sinyal yang sesuai dengan karakteristik dari masing-masing sensor kemudian mengubahnya menjadi level tegangan digital ataupun analog yang stabil dan dapat diproses oleh mikrokontroler pada robot.
vi
ABSTRACT
Robot is an integration of complex system that have capability to sense the environment around and give the correct respond based on the implemented artificial intelligence. The sensing capability of the robot need transducer/sensor to apply it, this transducer/sensor is functioning as instrument that convert physical matter into electrical signal. Sensor/transducer have many function depend on the kind. In this firefighting robot which have AMR (autonomous mobile robot) system applied needs sensor/transducer which can sense any physical matter, like distance (proximity sensing), infra-red. Every sensor/transducer work with amplifier circuit and signal conditioning circuit wisely to the characteristics from every sensor to convert into stable digital signal or analog signal and then it will sent to ADC (Analog to Digital Converter) and microcontroller unit in the robot system.
BAB 1
PENDAHULUAN
1.1Latar Belakang
Manusia membutuhkan bantuan dari sesuatu yang dapat bekerja cepat, teliti dan tidak mengenal lelah, robot adalah jawaban dari keinginan tersebut. Robot diharapkan dapat bekerja pada lingkungan yang berbahaya bagi kesehatan atau daerah yang harus diamati dengan pengamatan lebih dari kemampuan panca indera manusia.
Robot yang dapat berpindah tempat tanpa campur tangan manusia disebut juga Autonomous Mobile Robot (AMR) dan menjadi penelitian di berbagai universitas dan lembaga penelitian di seluruh dunia. Aplikasi AMR antara lain sebagai penyapu ranjau, kurir, dan penelitian objek mineral batuan planet di luar angkasa.
Robot pada dasarnya memiliki CPU (Central Processing Unit). CPU pada robot dapat berupa mikroprosesor atau mikrokontroler. Mikrokontroler adalah sistem komputer yang ringkas, dapat menggantikan fungsi komputer dalam pengendalian kerja dan disain yang jauh lebih ringkas daripada komputer. Dengan ukurannya yang kecil, mikrokontroler dapat digunakan pada peralatan yang bersifat bergerak (mobile), seperti kendaraan dan peralatan jinjing (portable), atau pada robot. Mikrokontroler digunakan sebagai otak dari suatu embedded system, atau suatu sistem komputer terpadu.
2
Atmel sebagai salah satu vendor yang mengembangkan dan memasarkan produk mikrokontroler telah menjadi suatu teknologi standar bagi para desainer sistem elektronika masa kini. Dengan perkembangan terakhir, yaitu generasi AVR (Alf and Vegard's Rise processor), para desainer sistem elektronika telah diberi suatu teknologi yang memiliki kapabilitas yang lebih maju, tetapi dengan nilai ekonomis yang cukup minimal.
Mikrokontroler AVR memiliki arsitektur RISC 8 bit, di mana semua instruksi dikemas dalam kode 16-bit (16-bits word) dan sebagian besar instruksi dieksekusi dalam 1 (satu) siklus clock, berbeda dengan instruksi MCS51 yang membutuhkan 12 siklus clock. Tentu saja itu terjadi karena kedua jenis mikrokontroler tersebut memiliki arsitektur yang berbeda. AVR berteknologi RISC (Reduced Instruction Set Computing), sedangkan seri MCS51 berteknologi CISC (Complex Instruction Set Computing). Secara umum, AVR dapat dikelompokkan menjadi 4 kelas, yaitu keluarga ATtiny, keluarga AT90Sxx, keluarga ATMega, dan AT86RFxx. Pada dasarya yang membedakan masing-masing kelas adalah memori, peripheral, dan fungsinya. Dari segi arsitektur dan instruksi yang digunakan, mereka bisa dikatakan hampir sama.
Mikrokontroler ATMega8535 digunakan sebagai pengendali pergerakan robot, dengan mengolah sinyal dari transducer seperti modul sensor. Kemudian sinyal keluaran dari modul sensor akan diolah oleh pengkondisi sinyal. Data jadi yang keluar dari pengkondisi sinyal akan dikirimkan ke mikrokontroler untuk diolah, yang kemudian akan mengendalikan arah pergerakan robot. Pada penelitian ini dibangun sebuah robot sederhana yang dapat bergerak di dalam sebuah ruangan yang dapat mengenali halangan berupa dinding
1.2Tujuan Penulisan
Penulisan laporan proyek ini bertujuan untuk:
1. Sebagai salah satu syarat untuk dapat menyelesaikan program Diploma Tiga (D-III) Fisika Instrumentasi FMIPA Universitas Sumatera Utara.
2. Pengembangan kreatifitas mahasiswa dalam bidang ilmu instrumentasi pengontrolan dan elektronika sebagai bidang yang diketahui.
3. Untuk mengaplikasikan ilmu pengetahuan yang diperoleh dari perkuliahan terhadap realita.
4. Membuat dan mengetahui aplikasi pemrograman berbasis mikrokontroler ATMega8535.
1.3Batasan Masalah
Pembahasan masalah dalam laporan proyek ini hanya mencakup masalah-masalah sebagai:
1. Robot menggunakan sensor SHARP GP2D12.
2. Untuk deteksi dinding kiri dan kanan menggunakan sensor inframerah menggunakan fotodioda.
3. Pembahasan mikrokontroler hanya sebatas hardware robot 4. Robot mengunakan Geared Motor DC.
5. H-Bridge menggunakan L298D.
6. Robot hanya dirancang untuk menghindari halangan/dinding yang dideteksi oleh sensor.
4
1.4 Sistematika Penulisan
Untuk mempermudah pembahasan dan pemahaman maka penulis membuat sistematika pembahasan bagaimana sebenarnya prinsip kerja dari Robot Avoider menggunakan SHARP GP2D12 berbasis mikrokontroler ATMEGA8535, maka penulis menulis laporan ini dengan sistematika penulisan sebagai berikut :
BAB 1 PENDAHULUAN
Dalam bab ini berisikan mengenai latar belakang, tujuan penulisan, batasan masalah, serta sistematika penulisan.
BAB 2 LANDASAN TEORI
Landasan teori, dalam bab ini dijelaskan tentang teori pendukung yang digunakan untuk pembahasan dan cara kerja dari rangkaian. Teori pendukung itu antara lain tentang mikrokontroler ATMega8535 (hardware dan software), bahasa program yang dipergunakan, serta cara kerja dari robot avoiderdan komponen pendukung.
BAB 3 RANCANGAN SISTEM ALAT DAN PROGRAM
Pada bagian ini akan dibahas perancangan dari alat, yaitu diagram blok dari rangkaian, skematik dari masing-masing rangkaian dan diagram alir dari program yang akan diisikan ke mikrokontroler ATMega8535.
BAB 4 ANALISA RANGKAIAN DAN SISTEM KERJA ALAT
Pada bab ini akan dibahas hasil analisa dari rangkaian dan sistem kerja alat, penjelasan mengenai program-program yang digunakan untuk mengaktifkan rangkaian, penjelasan mengenai program yang diisikan ke mikrokontroler ATMega8535.
BAB 5 KESIMPULAN DAN SARAN
Bab ini merupakan penutup yang meliputi kesimpulan dari pembahasan yang dilakukan dari laporan proyek ini serta saran apakah rangkaian ini dapat dibuat lebih efisien dan dikembangkan perakitannya pada suatu metode lain yang mempunyai sistem kerja yang sama.
6
BAB 2
LANDASAN TEORI
2.1 PENDAHULUAN
Sejalan dengan perkembangan ilmu pengetahuan dan teknologi, sistem pengukuran dan pengendalian atau instrumentasi semakin berperan penting dalam kehidupan manusia. Sistem tersebut amat membantu pekerjaan-pekerjaan manusia, baik pekerjaan yang bersifat monoton dan kontinyu maupun pekerjaan dinamis dan sensitif. Sebagai contoh, penerapan sistem pengendali pada sistem pengemudi pesawat terbang, pengendali pesawat ruang angkasa, pengendali satelit, dan sistem persenjataan peluru kendali. Dalam bidang industri, sistem pengendali diterapkan sebagai pengendali mesin-mesin produksi dan pengendali proses yang mengubah masukan berupa energi nonlistrik menjadi besaran listrik agar dapat diolah, baik secara analog maupun digital.
Beberapa proses industri yang membutuhkan sistem pengendali multi input-multi output serta permasalahan yang kompleks dapat diatasi dengan kemajuan sistem instrumentasi atau sistem pengendali didukung oleh kemajuan teknologi komputer.
Salah satu elemen penting sistem instrumentasi dan pengendali adalah Transducer. Transducer akan mengubah energi nonlistrik menjadi energi listrik sehingga proses pengendalian dapat dilakukan baik secara otomatik maupun manual.
2.1.1 Transducer sebagai Elemen Sistem Instrumentasi dan Pengendali Elektronik
Sistem instrumentasi dan pengendali elektronik pada dasarnya terdiri dari tiga bagian pokok. Bagian-bagian pokok sistem instrumentasi dan pengendali elektronik tersebut adalah bagian input/masukan, bagian pengkondisi sinyal/ processor, dan bagian output. Ketiganya dapat bersama-sama melakukan proses pengendalian dan menampilkan hasilnya, baik digital maupun analog.
Bagian input memungut besaran atau parameter nonlistrik yang terukur dan mengirimkan dalam bentuk besaran listrik yang sesuai ke bagian pengkondisi sinyal. Bagian pengkondisi sinyal melakukan proses mengkondisikan sinyal masukan ke dalam suatu format tertentu. Pengkondisian dapat berupa operasi aritmatik maupun logik. Selanjutnya, sinyal yang sudah terkondisi dapat ditampilkan melalui bagian keluaran atau untuk melakukan proses gerak mekanik sebuah mesin. Bagian output berfungsi untuk menampilkan sinyal keluaran baik berupa tampilan analog maupun digital. Bentuk keluaran dapat berupa tampilan display sevent segment, LED, dan meter atau perekam grafik.
Pada umumnya input pada sistem instrumentasi berupa besaran nonlistrik yang harus diubah ke dalam besaran listrik dengan menggunakan Transducer. Oleh karena
8
itu, sinyal ini dapat dikondisikan melalui proses elektronik. Dengan memahami fungsi kerja Transducer tersebut maka Transducer dapat didefinisikan sebagai piranti yang mengubah suatu bentuk energi ke bentuk energi yang lain. Penerapan Transducer dalam bidang industri umumnya sebagai piranti yang mengubah parameter seperti temperatur, tekanan, intensitas cahaya, kelembapan, derajat pH (tingkat keasaman), dan lain-lain menjadi sinyal elektronik. baik digital maupun analog.
Gambar 2.1 Blok diagram sistem pengendali atau intrumentasi elektronik
2.1.2 Klasifikasi Transducer/Sensor
Beberapa jenis Transducer dapat diklasifikasikan sesuai dengan prinsip pengubahan energi, sinyal keluaran, atau berdasarkan bidang pemakaian. Tabel berikut ini menunjukkan klasifikasi Transducer yang didasarkan pada prinsip kelistrikannya.
Transducer
Penguat Sinyal
Output
Amp Pengolah
sinyal
2.1.2.1Transducer Pasif
Transducer ini tidak dapat menghasilkan tegangan sendiri tetapi dapat menghasilkan perubahan nilai resistansi, kapasitansi, atau induktansi apabila mengalami perubahan kondisi sekeliling.
Jika Transducer ini mengalami perubahan kondisi pada lingkungan sekelilingnya maka nilai resistansinya akan berubah. Perubahan ini selanjutnya menyebabkan perubahan besar tegangan atau kuat arus yang dihasilkan Transducer. Perubahan resistansi ini dapat bernilai positif (nilai resistansi bertambah) berarti tegangannya juga meningkat atau negatif (nilai resistansi berkurang) berarti tegangannya berkurang. Perubahan tegangan inilah yang dimanfaatkan untuk mengetahui keadaan yang ingin diukur. Ada tiga jenis Transducer pasif yang dapat kita peroleh di pasaran, yaitu Transducer kapasitif, Transducer induktif, dan Transducer photo.
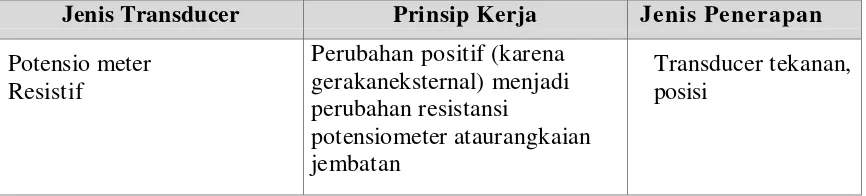
a. Transducer Resistif
Prinsip kerja dan penerapan Transducer berdasarkan jenisnya ditampilkan pada tabel berikut ini.
Tabel 2.1 Jenis-jenis Transducer Resistif
Jenis Transducer Prinsip Kerja Jenis Penerapan
Potensio meter Resistif
Perubahan positif (karena gerakaneksternal) menjadi perubahan resistansi potensiometer ataurangkaian jembatan Transducer tekanan, posisi
10
Strain Gage Tekanan eksternal mengubah resistansi pcnghantaran atau semikonduktor Transducer berat, tekanan, posisi RTD (Resistance Temperatur Detect or)
Perubahan suhu mempengaruhi resistansi logam murni yang mempunyai koefisien suhu positif.
Transducer suhu
Thermistor Perubahan suhu mempengaruhi
resistansi logam teroksidasi yang mempunyai koefisien suhu negatif.
Transducer suhu
Hygrometer Resistif
Resistansi elektrode turun bila kelembapan udara di
sekelilingnya naik atau bertambah.
Transducer kelembapan
Psychrometer Perbedaan suhu pada elektrode kering dan elektrode basah menghasilkan perubahan tegangan.
Transducer kelembapan
b. Transducer Kapasitif dan Transducer Induktif
Prinsip kerja Transducer ini adalah mengubah perubahan besaran nonlistrik menjadi perubahan nilai kapasitansi atau nilai Induktif. Berikut ini disajikan prinsip kerja dan penerapan Transducer Induktif berdasarkan jenisnya.
JenisTransducer Prinsip Kerja Jenis Penerapan
Transducer Kapasitif Kapasitas antara dua dielektrik, berubah disebabkan oleh kondisi fisis seperti tinggi cairan, komposisi larutan, tekanan ketebalan,kepadatan, aliran, dan panjang Transducer tinggi cairan, Transducer tekanan, kepa datan ketebalan. Transducer Induktif LVDT (Linear Variable Differential Transformer)
Perubahan posisi inti (cern) me nyebabkantimbulnya tegangan pada kumparan sekunder.
Transducer tekanan, posisi
Transducer tekanan Perubahan tekanan fisis seperti tekanan gas atau cairan menye babkan perubahan induktansi magnetik.
Transducer tekanan
Tabel 2.2 Jenis-jenis Transducer Kapasitif dan Induktif
c. Transducer Photo
Transducer photo dapat mengubah besar arus listrik jika dikenai cahaya/ sinar. Arus listrik inilah yang dimanfaatkan untuk mengetahui keadaan yang ingin diukur, misalnya gelap terangnya suatu ruangan. Kondisi lain yang dapat diukur adalah kondisi yang memanfaatkan sinar sebagai bagian utamanya.
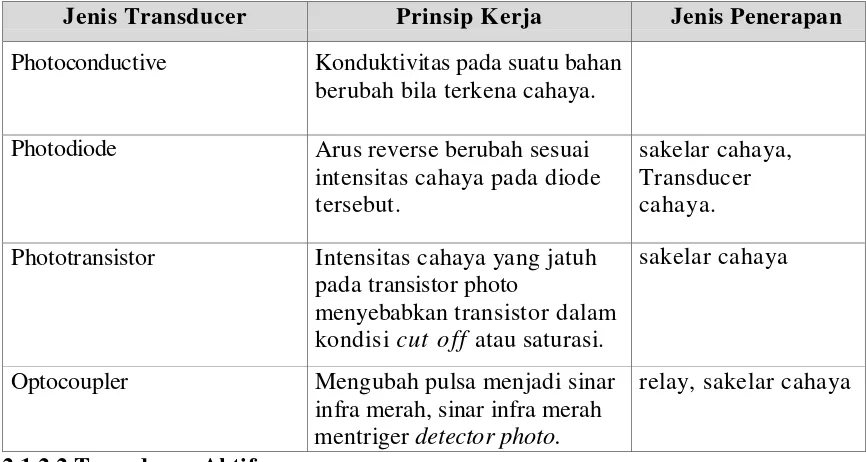
Ada beberapa jenis Transducer photo dan masing-masing mempunyai prinsip kerja yang berbeda-beda. Berikut ini disajikan tabel jenis jenis Transducer photo berikut prinsip kerja dan penerapannya dalam kehidupan sehari-hari.
Tabel 2.3 Jenis-jenis Transducer photo
Jenis Transducer Prinsip Kerja Jenis Penerapan
Photoconductive Konduktivitas pada suatu bahan berubah bila terkena cahaya. Photodiode Arus reverse berubah sesuai
intensitas cahaya pada diode tersebut.
sakelar cahaya, Transducer cahaya. Phototransistor Intensitas cahaya yang jatuh
pada transistor photo
menyebabkan transistor dalam kondisi cut off atau saturasi.
sakelar cahaya
Optocoupler Mengubah pulsa menjadi sinar infra merah, sinar infra merah mentriger detector photo.
relay, sakelar cahaya
2.1.2.2 Transducer Aktif
Transducer ini tidak memerlukan catu daya eksternal. Transducer ini malah dapat
12
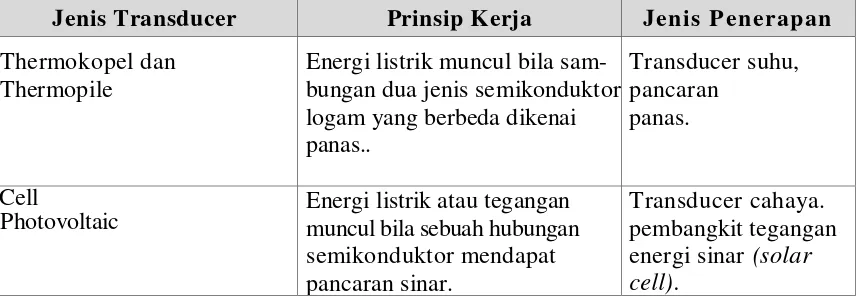
menghasilkan energi listrik. Berikut ini disajikan prinsip kerja dan penerapan Transducer aktif berdasarkan jenis jenisnya.
Tabel 2.4 Jenis-jenis Transducer aktif
Jenis Transducer Prinsip Kerja Jenis Penerapan
Thermokopel dan Thermopile
Energi listrik muncul bila sam- bungan dua jenis semikonduktor logam yang berbeda dikenai panas..
Transducer suhu, pancaran
panas.
Cell
Photovoltaic Energi listrik atau tegangan muncul bila sebuah hubungan semikonduktor mendapat pancaran sinar.
Transducer cahaya. pembangkit tegangan energi sinar (solar cell).
2.2 Transducer / Sensor Yang Sering Diaplikasikan Pada Robot
Terdapat berbagai macam sensor yang digunakan dalam teknik robotik.
Keberagaman ini juga termasuk dalam hal cara pengukuran dan cara interfacing ke kontroler.
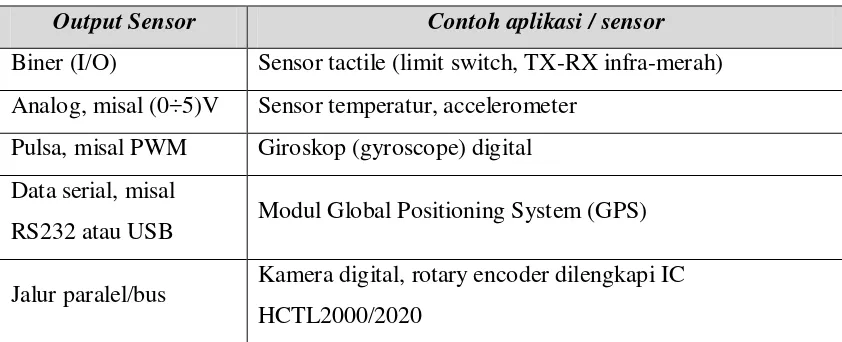
Dari segi tipe output dan aplikasinya sensor dapat diklasifikasikan seperti pada tabel 2.5 berikut ini.
Tabel 2.5 Klasifikasi sensor berdasarkan tipe output
Output Sensor Contoh aplikasi / sensor
Biner (I/O) Sensor tactile (limit switch, TX-RX infra-merah) Analog, misal (0÷5)V Sensor temperatur, accelerometer
Pulsa, misal PWM Giroskop (gyroscope) digital Data serial, misal
RS232 atau USB Modul Global Positioning System (GPS)
Jalur paralel/bus Kamera digital, rotary encoder dilengkapi IC HCTL2000/2020
Dari sudut pandang robot, sensor dapat diklasifikasikan dalam dua kategori, yaitu sensor lokal (on-board) yang dipasang di tubuh robot, dan sensor global, yaitu sensor yang diinstall di luar robot tapi masih tapi masih dalam lingkungannya (environment) dan data sensor global ini dikirim balik ke robot melalui komunikasi nirkabel (tanpa kabel). Dalam skala besar contoh sensor global ini adalah kamera yang terpasang pada satelit GPS yang mampu menangkap citra di lingkungan robot jauh dari atas.
2.2.1 Sensor Biner
Sensor biner menghasilkan output 1 atau 0 saja. Setiap perangkat sensor pada
14
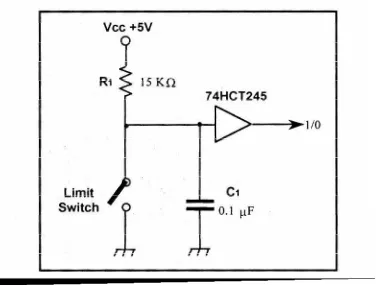
dasarnya dapat dioperasikan secara biner dengan menggunakan sistem threshold atau komparasi pada outputnya. Contoh yang paling dasar adalah limit switch yang dioperasikan sebagai sensor tabrakan yang biasa dipasang di bumper robot. Gambar 2.2 adalah contoh rangkaian limit switch yang dikuatkan dengan sebuah gate buffer 74HCT245. Limit switch dapat diganti dengan berbagai komponen sensor sesuai dengan fenomena yang akan dideteksi. Misalnya LDR (light dependent resistor), LED infra-merah, resistor NTC (Negative Temperature Coefficient) atau PTC (Positive Temperature Coefficient, dsb. Meskipun pada dasarnya komponen sensor-sensor ini menghasilkan output yang linier namun dapat juga dioperasikan dioperasikan secra ON/OFF dengan merangkaikannnya kepada input komparator.
Gambar 2.2 Rangkaian limit switch dengan buffer
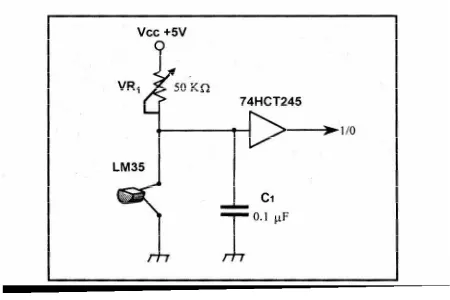
Gambar 2.3 adalah sebuah rangkaian sensor temperatur yang dioperasikan secara ON/OFF sebagai pembatas. IC LM35 yang digunakan sebagai komponen sensor bekerja seperti transistor yang resitansi kolektor emitor akan mengecil bila temperatur meninggi.
Kaki basis dapat dimanfaatkan untuk offset penguatan jika diperlukan. Dengan membiarkan kaki basis terbuka maka kalibrasi output LM35 cukup mengandalkan
pengaturan resistansi pull-up variable resistor VR1.
Gambar 2.3 Rangkaian sensor temperatur
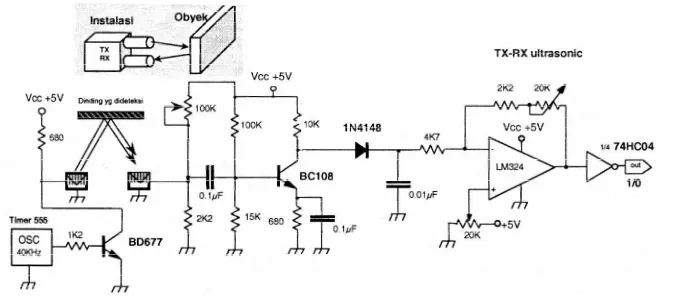
Contoh dalam gambar 2.4 berikut adalah rangkaian sensor berbasis transmitter-receiver (TX-RX) infra-merah. Sensor beroperasi secara biner yang outputnya dapat menyatakan “ada (1) atau tidak ada (0)” pantulan sinar infra-merah, yang artinya ada obyek/halangan atau tidak.
Gambar 2.4 Rangkaian sensor infra merah TX-RX
Dengan sedikit modifikasi, rangkaian dalam gambar 2.4 dapat diubah untuk penggunaan sensor berbasis piezolectric, yaitu sensor ultrasonik. Rangkaiannya
16
ditunjukkan dalam gambar 2.5 berikut ini.
Gambar 2.5 Rangkaian sensor ultrasonik TX-RX
2.2.2 Sensor Analog
Fenomena analog yang biasa diukur di dalam sistem internal robot berhubungan dengan posisi, kecepatan, percepatan, kemiringan/kecondongan, dsb. Sedangkan yang diukur dari luar sistem robot banyak berhubungan dengan penetapan posisi kooordinat robot terhadap referensi ruang kerja, misalnya posisi robot terhadap lintang-bujur bumi, posisi obstacle yang berada di luar jangkauan robot, dan sebagainya. Sebagai contoh, sensor GPS yang diinstall di sistem environment yang dapat memberikan data posisi (dalam representasi analog) ke robot via komunikasi.
a. Potensiometer
Komponen ini adalah sensor analog yang paling sederhana namun sangat berguna untuk mendeteksi posisi putaran, misalnya kedudukan sudut poros aktuator berdasarkan nilai resistansi pada putaran porosnya.
Gambar 2.6 berikut ini adalah sebuah potensiometer presisi yang dipasang pada poros sendi lengan robot tangan.
Gambar 2.6 Potensiometer sebagai sensor posisi
Yang perlu diperhatikan dalam penggunaan potensiometer sebagai sensor analog adalah masalah linearitas output terhadap besaran yang diukurnya. Jika yang diukur adalah sudut maka nilai perubahan resistansi yang direpresentasikan dalam perubahan tegangan output harus berbanding lurus dengan perubahan sudut yang dideteksi. Gambar 2.7 mengilustrasikan keadaan ini. k adalah konstanta konversi tegangan output potensiometer ke besaran sudut. Sebagai misal, Vout mempunyai jangkauan (0÷3)V sedang sudut yang diukur adalah (0÷300)°, maka perputaran 1° dan 10° adalah setara dengan perubahan tegangan output sebesar,
Vout1° = (1/300)3V = 0,01V Vout10° = (10/300)3V = 0,1 V
18
Gambar 2.7 θ vs Vout
Sinyal output sensor posisi (sudut) menggunakan potensiometer ini (atau komponen sensor posisi linier yang lain) dapat dimanipulasi menjadi informasi kecepatan dengan persamaan,
(2.1)
Dalam Ekspresi untuk pemrograman dapat dituliskan sebagai,
(2.2)
Misal, jika waktu sampling Δt = 0.01 detik, θt = 3.6 rad, dan θt-1 = 3.65rad, Maka kecepatan sudutnya saat itu adalah,
(2.3)
b. Position Sensitive Device (PSD)
Sensor jenis ini adlah bentuk pengembangan dari sensor TX-RX infra merah (atau jenis optik lain) yang didesain dengan tingkat kepresisian tinggi dan menyatu dengan
rangkaian signal conditioning-nya. Sebagai contoh kita ambil komponen PSD buatan SHARP, yaitu:
1. GP2D12 : memiliki output analog. Dapat langsung dihubungkan ke ADC. Mampu mendeteksi obyek hingga jarak 80 cm. Namun sayang outputnya tidak linier sehingga perlu dikalibrasi dalam pemrograman.
2. GP2D02 : memiliki output serial. Komponen ini harus dihubungkan ke interface serial seperti RS232C untuk pengiriman data. Kontroler harus menggunakan prosedur pewaktuan secara serial untuk membaca data sensor.
Gambar 2.8 Sharp GP2D12
Gambar 2.9 Sharp GP2D02
PSD termasuk dalam kategori, sensor sonar, seperti juga sistem TX-RX ultrasonic. Sensor bekerja berdasarkan sinyal pantul (echo) yang ditangkap oleh penerima. Pada sistem ultrasonik data jarak yang terukur adalah sebanding dengan lama
[image:30.595.215.437.350.446.2] [image:30.595.209.437.533.683.2]20
waktu antara sinyal dikirim dan sinyal echo diterima. Sensor sonar ini (sistem pemancar dan penerima sinyal sonar) ini sangat berguna dalam sistem mobile robot. Dalam kegiatan navigasi, robot ideal diharapkan mendeteksi obstacle/halangan di sekelilingnya secara cepat atau realtime. Untuk disain secara umum, sensor sonar biasanya dipasang disekeliling badan robot dengan maksud agar robot mampu mendeteksi setiap saat kondisi atau konfigurasi medan dalam segala arch (dari sudut pandang robot). Untuk jangkauan yang relatif jauh dapat digunakan sensor sonar jenis ultrasonik. Namun, sensor ultrasonik memiliki kelemahan mendasar, yaitu mudahnya terjadi interferensi antara sensor sensor yang berdekatan dan waktu akses yang terbatas (maksimum sekitar 20 kali scanning tiap detik). Untuk keperluan manuver kecepatan tinggi sensor ultrasonik ini kurang sesuai. Sebagai alternatif dapat diganti dengan sensor PSD. Dengan meiggunakan jenis PSD selain interferensi ini dikurangi, waktu akses juga lebih cepat meski jangkauan deteksinya tidak sejauh pada jenis ultrasonik.
2.2.4 Rangkaian Signal Conditioning menggunakan OpAmp.
Sensor analog dalam aplikasi hampir selalu berhadapan dengan gangguan-gangguan klasik seperti noise, interferensi dengan sinyal elektromagnet, dan sebagainya. Selain itu sensor memiliki impedansi dan jangkauan tegangan output yang tidak selalu kompatibel dengan perangkat data acquisition yang digunakan. Sebagai contoh, sensor temperatur Tinier menggunakan NTC, PTC ataupun IC LM35 perlu dirangkai dengan rangkaian penguat agar outputnya mempunyai jangkauan, ±5V atau t12V. Output accelerometer ADXL105 juga perlu dikuatkan agar output maksimalnya (sesuai dengan kondisi operasi/tugas robot) setara tegangan maksimal input ADC (atau lebih kecil
sedikit). Untuk itu diperlukan perlakuan penyelarasan sinyal antara sensor dengan sistem kontroler yang biasa disebut sebagai signal conditioning (pengkondisian sinyal).
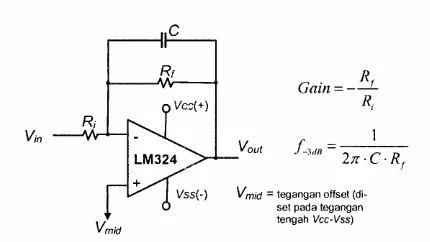
Pada dasarnya rangkaian signal conditioning dapat dibangun dari komponen IC operational amplifier (OpAmp) umum seperti LM741, LM324, dsb. Rangkaian dapat berupa amplifier (penguat), attennuator (pelemah), filter, pembatas (limiter), damper (pemotong puncak sinyal), dan lain-lain. Berikut ini diberikan dasar-dasar rangkaian OpAmp yang biasa dipakai sebagai rangkaian signal conditioning, yaitu inverting dan non-inverting amplifier, low-pass filter dan high-pass filter.
a. Inverting Amplifier
Rangkaian inverting amplifier mempunyai bentuk standar sebagai berikut.
Gambar 2.10 Inverting Amplifier
b. Non-inverting Amplifier
22
Jika diperlukan penguatan tanpa perlu membalik fasa sinyal dapat digunakan rangkaian non-inverting amplifier yang dibentuk dari susunan dua rangkaian inverting
[image:33.595.172.485.241.348.2]amplifier secara serf seperti gambar berikut.
Gambar 2.11 Non Inverting Amplifier
c. Low-pass Filter
Rangkaian low-pass filter berguna untuk menyaring sinyal berfrekuensi rendah yang diinginkan dengan menahan sinyal berfrekuensi tinggi yang tidak dikehendaki. Untuk pembacaan sensor posisi menggunakan potensiometer, rangkaian low-pass filter ini diperlukan agar noise yang menyertai, misalnya dari hash gesekan mekanis antara permukaan sentuh resistor dengan konektor porosnya, dapat ditekan sekecil mungkin. Perlu digaris bawahi di sini bahwa penentuan batas frekuensi yang akan diredam tidak boleh mengganggu sinyal asli yang dideteksi. Misalnya pada gerakan dengan kecepatan dan percepatan yang relatif tinggi, informasi perubahan posisi dapat memiliki respon perubahan yang tinggi pula sehingga vibrasi gerakan yang mungkin terjadi dapat menyebabkan hash bacaan sinyal "mirip" seperti noise.
Sebuah contoh rangkaian low-pass filter 1-pole menggunakan OpAmp LM324 diberikan dalam Gambar 2.12 berikut ini,
[image:34.595.202.417.152.273.2]
Gambar 2.12 Low Pass Filter 1-Pole
Contoh berikut adalah rangkaian low-pass filter 2-pole yang mempunyai frekuensi cut-off 30 Hz, menggunakan metode Bessel.
Gambar 2.13Rangkaian Low –pass filter 2-pole Bessel
d. High Pass Filter
[image:34.595.198.426.441.552.2]24
Kebalikan dengan low-pass filter, high-pass filter bekerja menyaring frekuensi tinggi yang diinginkan dengan menahan frekuensi rendah yang tidak dikehendaki. Contoh rangkaian berikut adalah sebuah high-pass filter menggunakan OpAmp LM324.
Gambar 2.14 Rangkaian high-pass filter 1-pole
[image:35.595.189.414.220.314.2]Untuk high-pass filter 2-pole dapat menggunakan rangkaian seperti pada Gambar 2.15 berikut ini
Gambar 2.15Rangkaian high-pass filter 2-pole Bessel
2.3 Transducer Photokonduktif
[image:35.595.208.437.416.509.2]Transducer photokonduktif mengubah perubahan intensitas cahaya menjadi perubahan konduktivitas. Transducer photokonduktif bekerja berdasarkan prinsip bahwa resistansi listrik berubah bila cahaya jatuh pada piranti tersebut. Sebuah transducer photokonduktif tidak menghasilkan emf atau beda potensial seperti pada photocell, tetapi resistansi listrik pada photokonduktif akan berkurang bila cahaya jatuh padanya. Transducer dihubungkan dengan sebuah sumber arus dari luar, dan arus berubah baik bertambah atau berkurang yang disebabkan oleh berubahnya resistansi listrik karena perubahan intensitas cahaya yang jatuh padanya. Istilah photocell Sering digunakan baik pada photovoltair maupun pada photokonduktif. Photocell mempunyai respon yang baik terhadap cahaya infra merah dan ultra violet. Sel photokonduktif sensitif terhadap cahaya sehingga banyak dipakai pada rangkaian pengendali lampu-lampu taman atau lampu penerangan jalan.
Transducer photokonduktif baik tipe bulk atau tipe pertemuan, kebanyakan dibuat dari bahan cadmium selenoide atau cadmium sulfide. Tipe "bulk" lebih banyak dipakai karena mempunyai ukuran yang kecil, murah dan sensitivitasnya tinggi.
Dua tipe transducer photokonduktif yang banyak dipakai adalah photodioda dan phototransistor. Photodioda sejenis dengan dioda pada umumnya. Perbedaan pokok pada photodioda ini adalah dipasangnya sebuah lensa pemfokus sinar. Lensa ini berfungsi untuk memfokuskan sinar jatuh pada pertemuan pn. Konduktivitas dioda ditentukan langsung oleh cahaya yang jatuh padanya.
26
Energi pancaran cahaya yang jatuh pada pertemuan pn menyebabkan sebuah elektron berpindah ke tingkat energi yang lebih tinggi. Elektron berpindah ke luar dari valensi band meninggalkan "hole" sehingga membangkitkan pasangan elektron bebas dan hole.
Rangkaian dasar photodioda ditunjukkan dengan gambar 2.16 Photodioda dihubungkan seri dengan sebuah R dan dicatu dengan cumber tegangan DC. Arus balik akan bertambah besar bila sebuah cahaya jatuh pada pertemuan pn photodioda dan arus balik(Iλ) akan menjadi sangat kecil bila pada pertemuan pn photodioda tidak terdapat cahaya yang jatuh padanya. Arus yang mengalir pada kondisi gelap disebut "dark current" sedangkan resistansinya ditentukan dengan hukum Ohm sebagai berikut:
Gambar 2.17 menunjukkan kurva karakteristik photodioda. Arus reverse ditentukan oleh tegangan balik. Arus balik ditunjukkan dengan sumbu Y dalam satuan mA. Adapun kuat cahaya ditunjukkan pada sumbu X dengan satuan foot candles.
R R
V R
I
Gambar 2.16 Rangkaian dasar reverse Photodioda.
Gambar 2.17 Grafik hubungan kuat arus terhadap terang cahaya photodioda.
[image:38.595.188.475.373.613.2]28
BAB 3
RANCANGAN SISTEM
[image:39.595.179.498.273.730.2]3.1Blok Diagram Sistem
Gambar 3.1 Blok diagram rancangan sistem SENSOR (Reflective Optosensor)
Kiri dan Kanan Robot
PENGKONDISI SINYAL
ADC Internal ATMega8535
PORT C Mikrokontroler
ATMega8535
H--Bridge Sensor SHARP
GP2D12
Sistem Minimum ATMega8535
Motor Data (Halangan, Infra Merah)
Geared Motor DC Kiri
Geared Motor DC Kanan
Robot terdiri dari beberapa sensor, yaitu sensor SHARP GP2D12 dan sensor optocoupler yang berjenis reflective optosensor. Sensor SHARP GP2D12 ini diguanakan untuk sensor depan robot dan sensor optocoupler digunakan untuk sensor halangan kanan dan kiri robot. Mikrokontroler menggunakan ATMega 8535 dengan clock speed 8 MHz. H-Bridge menggunakan IC L298. Motor DC menggunakan jenis geared motor DC dengan gear ratio 120 : 1.
3.2Rangkaian Sistem Minimum Mikrokontroler ATMega8535
Rangkaian skematik dan layout PCB sistem minimum mikrokontroler ATMega8535 dapat dilihat pada gambar 3.2. di bawah ini:
[image:40.595.108.520.424.617.2]
Gambar 3.2 Rangkaian Skematik Sistem Minimum Mikrokontroler ATMega8535
30
Pin 12 dan 13 dihubungkan ke XTAL 8 MHz dan dua buah kapasitor 30 pF. XTAL ini akan mempengaruhi kecepatan mikrokontroler ATMega8535 dalam mengeksekusi setiap perintah dalam program. Pin 9 merupakan masukan reset (aktif rendah). Pulsa transisi dari tinggi ke rendah akan me-reset mikrokontroler ini.
Untuk men-download file heksadesimal ke mikrokontroler, Mosi, Miso, Sck, Reset, Vcc dan Gnd dari kaki mikrokontroler dihubungkan ke RJ45. RJ45 sebagai konektor yang akan dihubungkan ke ISP Programmer. Dari ISP Programmer inilah dihubungkan ke komputer melalui port paralel. Kaki Mosi, Miso, Sck, Reset, Vcc dan Gnd pada mikrokontroler terletak pada kaki 6, 7, 8, 9, 10 dan 11. Apabila terjadi keterbalikan pemasangan jalur ke ISP Programmer, maka pemograman mikrokontroler tidak dapat dilakukan karena mikrokontroler tidak akan bisa merespon.
3.3Rangkaian Power Supply
[image:41.595.131.512.560.724.2]Rangkaian skematik power supply dapat dilihat pada gambar 3.3 di bawah ini:
Gambar 3.3 Rangkaian Skematik Power Supply
Rangkaian power supply berfungsi untuk mensupplay arus dan tegangan ke seluruh rangkaian yang ada. Rangkaian power supply ini terdiri dari dua keluaran, yaitu 5 volt dan 12 volt, keluaran 5 volt digunakan untuk menghidupkan seluruh rangkaian kecuali rangkaian ADC, sedangkan keluaran 12 volt digunakan untuk mensupplay tegangan ke rangkaian ADC, karena rangkaian ADC memerlukan tegangan input sebesar 12 volt agar tegangan referensinya stabil.
Trafo stepdown yang berfungsi untuk menurunkan tegangan dari 220 volt AC menjadi 12 volt AC. Kemudian 12 volt AC akan disearahkan dengan menggunakan dua buah dioda, selanjutnya 12 volt DC akan diratakan oleh kapasitor 2200 µF. Regulator tegangan 5 volt (LM7805CT) digunakan agar keluaran yang dihasilkan tetap 5 volt walaupun terjadi perubahan pada tegangan masukannya. LED hanya sebagai indikator apabila PSA dinyalakan. Transistor PNP TIP 32 disini berfungsi sebagai penguat arus apabila terjadi kekurangan arus pada rangkaian, sehingga regulator tegangan (LM7805CT) tidak akan panas ketika rangkaian butuh arus yang cukup besar. Tegangan 12 volt DC langsung diambil dari keluaran jembatan dioda.
3.4Rangkaian Sensor Halangan/jarak
Modul sensor halangan/jarak berfungsi untuk menjaga jalan robot agar tidak menabrak dinding dari arena sirkuit. Modul sensor ini menggunakan sensor SHARP GP2D12 sebagai sensor pengindera jarak (proximity sensing). Sensor jarak yang digunakan adalah sensor jarak tipe GP2D12 yang diproduksi oleh Sharp . GP2D12 adalah sensor jarak yang menggunakan prinsip triangulation (prinsip segitiga) untuk mengukur jarak. Sensor ini terdiri atas sebuah LED infra merah yang menghasilkan
32
cahaya infra merah termodulasi yang dipancarkan ke objek yang hendak diukur jaraknya dan sebuah array CCD yang berfungsi sebagai detektor infra merah yang akan menerima pantulan cahaya infra merah dari objek yang diukur.
[image:43.595.176.462.213.434.2]
Gambar 3.4 Prinsip triangulasi pada sensor SHARP GP2D12
Beberapa karakteristik dari sensor jarak GP2D12 adalah :
1. Power supply 4,5 - 5,5 Volt.
2. Output berupa tegangan analog yang berkisar antara 0,4 - 2,5 Volt. 3. Pembacaan jarak tidak begitu dipengaruhi oleh warna objek yang diukur 4. Dapat mendeteksi objek dengan jarak berkisar antara 8 cm - 80 cm 5. Tidak membutuhkan rangkaian kontrol eksternal
6. Tidak begitu dipengaruhi oleh kondisi pencahayaan ruangan
Paket sensor GP2D12 ditunjukkan pada gambar 3.5
Gambar 3.5 Bentuk fisik dari SHARP GP2D12 dengan kabel penghubungnya
Sensor GP2D12 memiliki tiga buah pin yaitu untuk Vcc, Ground dan Vo (tegangan output). Karakteristik tegangan output dari sensor ditunjukkan pada gambar 3.6
Gambar 3.6 Karakteristik tegangan output dari SHARP GP2D12
Karena tegangan output sensor untuk pembacaan jarak yang valid berkisar antara 0,4 - 2,5 Volt maka sensor ini tidak lagi membutuhkan rangkaian pengkondisi sinyal. Masing -masing output dari sensor jarak dapat langsung dihubungkan ke ADC yang tegangan referensi telah diatur sebesar sebesar 2,56 volt.
[image:44.595.220.441.373.568.2]34
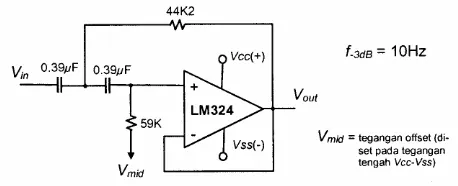
3.5 Rangkaian Sensor Inframerah
[image:45.595.251.383.196.344.2]Sensor inframerah terdiri dari photo dioda dan LED inframerah. Sensor dirangkai dengan rangkaian seperti berikut :
Gambar 3.7 Rangkaian pengkondisi sinyal inframerah
Rangkaian sensor inframerah untuk kiri dan kanan robot mengalami perubahan desain dari rancangan awal. Hal ini disebabkan penggunaan komparator dalam rangkaian robot membuat robot kurang fleksibel dalam logika pemrograman sehinga robot lebih kaku dalam pergerakannya. Oleh sebab itu penulis menggunakan rangkaian seperti di atas agar data dapat diolah di ADC yang terdapat pada mikrokontroler ATMega8535.
3.6Modul H-Bridge
Modul H-bridge menggunakan IC L298, yang didalamnya sudah terdiri dari dua buah H-Bridge. Susunan H-bridge tersebut sudah diberi pengaman dengan menggunakan gerbang Logika AND. Gambar 3.4 adalah gambar diagram blok H-Bridge L298. Keterangan :
+VS adalah sebagai suplly tegangan untuk motor +VSS adalah sebagai suplly tegangan untuk IC L298 Out 1 dan out 2 dihubungkan ke motor 2
En A merupakan sinyal enable yang berfungsi untuk mengaktifkan H-Bridge. Berikut adalah penjelasan untuk 1 blok H-Bridge
[image:46.595.132.500.495.694.2]Pada saat In-1 dan In-2 bernilai x (don’t care) dan En A adalah 0, maka Out 1 dan Out 2 adalah 0. Apabila En A=1 dan In-1 dan In-2 = 0 maka gerbang A (0,0), gerbang B (1,1), gerbang C (0,0) dan gerdang D (1,1) sehingga Out1 dan Out2 akan menuju Ground yang diaktifkan gerbang B dan D. Apabila En A=1, In-1 = 1 dan In 2 = 0 maka gerbang A dan gerbang D akan aktif , maka arus mengalir dari Out 1 ke Out 2. Apabila En A = 1, In-1 = 0 dan In-2 =1 maka gerbang B dan C akan aktif sehingga arus mengalir dari Out-2 ke Out-1. Apabila En A=1, In-1 = 1 dan In-2 = 1 maka gerbang C dan A akan aktif sehingga antara Out 1 dan Out 2 tidak terjadi beda potensial. Berikut tabel kebenarannya.
Gambar 3.8 Diagram Blok H-Bridge L298
36
Tabel 3.1 Tabel Kebenaran Diagram Blok H-Bridge L298 Input 1 Input 2 Enable A Output 1 Output 2
X x 0 0 0
0 0 1 0 0
1 0 1 1 0
0 1 1 0 1
1 1 1 1 1
3.7 Flowchart Rangkaian
Gambar 3.9 Flowchart Program S t a r t
S u d a h d e k a t
K ir i > K a n a n
K a n a n > K i r i D e t e k s i S e n s o r D e p a n
D e t e k s i k e d u a s e n s o r
D e t e k s i k e d u a s e n s o r
M a ju
B e l o k K a n a n
B e lo k K ir i T id a k
Y a
T id a k
Y a
Y a
D e t e k s i k e d u a s e n s o r
K a n a n < > K ir i T id a k
M u n d u r Y a
D e t e k s i k e d u a s e n s o r
K a n a n = K ir i Y a M u n d u r
T id a k
38
Penjelasan Flowchart Program :
1.Robot pertama kali akan mendeteksi sensor SHARP GP2D12 yang mendeteksi halangan di depan, apabila halangan masih jauh maka robot akan terus maju dan apabila robot sudah dekat maka robot akan medeteksi sensor kiri dan kanan. 2.Setelah sensor kiri dan kanan dideteksi dan sensor kiri > kanan maka robot akan
belok ke kanan dan apabila tidak, robot akan mendeteksi lagi.
3.Apabila sensor kanan > kiri maka robot akan belok ke kiri dan apabila tidak robot akan mendeteksi lagi.
4.Apabila sensor kiri dan kanan = 1, maka robot akan mundur.
5.Apabila robot mendeteksi sensor kiri dan kanan = 0 maka robot akan mundur 6.Rutin dikerjakan berulang-ulang.
BAB 4
PENGUJIAN RANGKAIAN
4.1. Pengujian SHARP GP2D12
[image:50.595.194.438.388.519.2]Untuk mengambil data dari SHARP GP2D12 dilakukan pengukuran sebagai berikut, SHARP dirangkai sebagai berikut :
Gambar 4.1 Rangkaian SHARP GP2D12
Kapasitor yang digunakan adalah 4,7 F. Kapasitor ini berfungsi sebagai filter noise dari tiap-tiap data yang diberikan. Dari pengetesan sensor didapati bahwa jarak terdekat antara sensor dan penghalang adalah sekitar 8 cm. Pada jarak 8 cm hasil keluaran dari sensor adalah 2,57 V. Pada jarak 30 cm hasil keluaran sensor adalah 0,75 V. Berikut adalah tabel hasil uji coba sensor SHARP GP2D12.
40
Tabel 4.1 Perubahan tegangan keluaran sensor SHARP GP2D12 terhadap jarak
Jarak (cm) Tegangan Keluaran (V)
0 0,00
1 0,8
2 1,05
3 1,14
4 1,27
5 1,52
6 1,76
7 2,38
8 2,57
9 2,48
10 2,38
11 2,24
12 2,10
13 1,94
14 1,84
15 1,70
16 1,59
17 1,51
18 1,44
19 1,34
20 1,29
21 1,23
22 1,17
23 1,08
24 1,06
25 1,00
26 0,95
27 0,87
28 0,83
29 0,79
30 0,75
4.2. Pengujian Rangkaian Sensor Infrared
Rangkaian ini menggunakan LED inframerah dan fotodioda sebagai komponen utamanya. LED IR akan memancarkan inframerah dan foto dioda sebagai penerimanya. Perancangan sensor dengan menggunakan komparator kurang
memuaskan, hal ini disebabkan penggunaan komparator hanya menghasilkan sinyal high dan low, sedangkan untuk pergerakan yang lebih fleksiibel dibutuhkan pengendalian perubahan dengan membandingkan batasan (range) tertentu sehingga program lebih memanfaatkan logikanya. Dengan begitu penulis berinisiatif mengubahnya menjadi lebih sederhana (gambar 4.2) agar nilai tegangan keluaran dapat langsung dibaca pada ADC sehingga komparasi tegangan sensor bisa lebih variatif dan fleksibel pada pemrogramannya, ini mengakibatkan robot lebih mulus pergerakannya dan tidak kaku.
Gambar 4.2 Pengkondisi sinyal yang sederhana dan lebih baik
4.3. Pengujian Rangkaian H-Bridge
Modul H-bridge menggunakan IC L298, yang didalamnya sudah terdiri dari dua buah H-Bridge. Susunan H-bridge tersebut sudah diberi pengaman dengan menggunakan gerbang Logika AND. Gambar 4.4 adalah gambar diagram blok H-Bridge L298. Keterangan :
42
+VS adalah sebagai suplly tegangan untuk motor +VSS adalah sebagai suplly tegangan untuk IC L298 Out 1 dan out 2 dihubungkan ke motor 2
En A merupakan sinyal enable yang berfungsi untuk mengaktifkan H-Bridge. Berikut adalah penjelasan untuk 1 blok H-Bridge
[image:53.595.132.500.495.694.2]Pada saat In-1 dan In-2 bernilai x (don’t care) dan En A adalah 0, maka Out 1 dan Out 2 adalah 0. Apabila En A=1 dan In-1 dan In-2 = 0 maka gerbang A (0,0), gerbang B (1,1), gerbang C (0,0) dan gerdang D (1,1) sehingga Out1 dan Out2 akan menuju Ground yang diaktifkan gerbang B dan D. Apabila En A=1, In-1 = 1 dan In 2 = 0 maka gerbang A dan gerbang D akan aktif , maka arus mengalir dari Out 1 ke Out 2. Apabila En A = 1, In-1 = 0 dan In-2 =1 maka gerbang B dan C akan aktif sehingga arus mengalir dari Out-2 ke Out-1. Apabila En A=1, In-1 = 1 dan In-2 = 1 maka gerbang C dan A akan aktif sehingga antara Out 1 dan Out 2 tidak terjadi beda potensial. Berikut tabel kebenarannya.
Gambar 4.3 Diagram Blok H-Bridge L298
Tabel 4.2 Tabel Kebenaran Diagram Blok H-Bridge L298 Input 1 Input 2 Enable A Output 1 Output 2
X x 0 0 0
0 0 1 0 0
1 0 1 1 0
0 1 1 0 1
1 1 1 1 1
4.4. Pengujian Rangkaian Power Supply
Pengujian rangkaian ini dengan mengukur tegangan keluaran dari power supply menggunakan multimeter digital. Setelah dilakukan pengukuran maka diperoleh besarnya tegangan keluaran sebesar 5 volt. Setelah itu rangkaian power supply dihubungkan ke sumber arus listrik dan saklar ON/OFF nya diaktifkan ke posisi ON.
4.5. Pengujian Sistem Minimum ATMega8535
Karena pemrograman robot menggunakan mode ISP (In System Programming) mikrokontroler harus dapat diprogram langsung pada papan rangkaian dan rangkaian mikrokontroler harus dapat dikenali oleh program downloader. Pada pengujian ini berhasil dilakukan dengan dikenalinya jenis mikrokontroler oleh program downloader yaitu ATMega8535.
44
Gambar 4.4 Informasi Signature Mikrokontroler
ATMega menggunakan kristal dengan frekuensi 8 MHz, apabila Chip Signature sudah dikenali dengan baik dan dalam waktu singkat, bisa dikatakan rangkaian mikrokontroler bekerja dengan baik dengan mode ISP-nya.
4.6. Pengujian Rangkaian Keseluruhan
Secara elektronis sistem sudah bekerja dengan baik, jika diuji dari titik ke titik dengan mengukur tegangan keluaran ataupun respon dari semua sensor yang ada. Rangkaian secara keseluruhan telah berfungsi dengan baik. Robot berhasil mendeteksi dinding yang berada di sekitarnya dan tidak menabrak dinding penghalang seperti yang diharapkan.
BAB 5
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari evaluasi hasil kerja alat dapat diambil beberapa kesimpulan dalam penelitian ini. Kesimpulan yang diambil oleh penulis adalah :
1. Penggunaan Sensor SHARP GP2D12 sangat baik penggunaannya dikarenakan sensor tidak terpengaruh dengan inframerah yang berasal dari alam dan presisi pengukurannya sangat baik.
2. Penggunaan sensor inframerah yang menggunakan prinsip reflective optosensor cukup baik dalam pengaplikasiannya tetapi memiliki kelemahan yang cukup fatal apabila sensor terkena dengan radiasi infra merah alam, seperti matahari, lampu pijar dan lain-lain.
3. Mikrokontroler sebagai pusat kendali dapat diatur sedemikian rupa dengan memprogram mikrokontroler tersebut sehingga hasil dari rancangan cukup memuaskan.
4. Mikrokontroler ATMega8535 dengan fitur ADC internal yang telah terintegrasi membuat rangkaian lebih sederhana dan efisien.
46
5.2 Saran
1. Dengan beberapa pengembangan dan penyempurnaan sistem dari robot avoider ini maka akan lebih baik lagi hasilnya.
2. Dengan menambah sensor kita dapat mencakup daerah yang lebih luas dan membuat robot lebih presisi.
3. Penggunaan Sensor SHARP GP2D12 memerlukan kalibrasi lagi agar kita dapat memprogram robot berdasarkan data ril, hal ini disebabkan output dari sensor SHARP GP2D12 tidak linear.
4. Penggunaan sensor inframerah hendaknya memerlukan gelombang inframerah termodulasi sehingga dapat meminimalisir gangguan infra merah dari alam.
DAFTAR PUSTAKA
Budiharto, Widodo. 2006. Belajar Sendiri Membuat Robot Cerdas. Jakarta: Elex Media Komputindo.
Malvino, Albert Paul. 2004. Prinsip - Prinsip Elektronika. Jilid 1 & 2 Edisi 4. Jakarta: Salemba Teknika.
Panduan Tatacara Penulisan Tugas Akhir. 2005. Dokumen Nomor: Akad/05/2005. Medan: FMIPA, Universitas Sumatera Utara.
Wardhana, Lingga. 2006. Belajar Sendiri Mikrokontroler AVR Seri ATMega8535. Yogyakarta: Penerbit ANDI.
http://www.atmel.com/dyn/resources/prod_documents/doc2502. Diakses mulai Juni 2007 sampai Januari 2008.
ftp://ftp.cadsoft.de/eagle/program/5.1/eagle-win-5.1.0.exe. Diakses mulai Juni 2007 sampai Desember 2007.
xiii
DAFTAR LAMPIRAN
Halaman
Lampiran 1: Gambar Rangkaian Robot Avoider L-1
Lampiran 2: Program Lengkap L-2
Lampiran 3: Gambar Robot Avoider L-4
Lampiran 4: Data Output Sensor Inframerah L-6
Lampiran 5: Data Sheet ATmega8535 L-7
Lampiran 6: Data Sheet SHARP GP2D12 L-12
Lampiran 7: Data Sheet L298 L-17