Disusun oleh
AGUNG BROTO KUNCORO NIM: 025114075
PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS SANATA DHARMA YOGYAKARTA
2007
ON AVR MICROCONTROLLER
In partial fulfillment of the requirements for the degree of SARJANA TEKNIK of Electrical Engineering Study Program
Compiled by:
AGUNG BROTO KUNCORO NIM: 025114075
ELECTRICAL ENGINEERING STUDY PROGRAM
ELECTRICAL ENGINEERING DEPARTMENT
ENGINEERING FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
2007
disadari atau tidak adalah dalam
perjalanan kepada Tuhannya. Dan
pasti akan menemui Tuhannya untuk
menerima pembalasan-Nya dari
perbuatannya yang buruk maupun
yang baik”
(QS. AL-INSYIQOQ)
Tugas Akhir ini ku persembahkan untuk :
Ayahanda(alm) dan Ibunda tercinta. Adik tersayang. Rekan-rekan seperjuangan di S1 Teknik Elektro USD. Dan satu nama yang masih menjadi rahasia Allah.
1. Bapak A. Bayu Primawan, S.T.,M.Eng. selaku Kaprodi Teknik Elektro.
2. Bapak Martanto, S.T., M.T dan Ibu Wiwien Widyastuti, S.T., M.T atas bimbingan kepada penulis.
3. Bapak B. Djoko Untoro S. Ssi. MT dan Bapak Damar Widjaja, ST, MT atas kritik dan saran kepada penulis.
4. Ibu Bernadeta Wuri Harini, S.T selaku pembimbing akademik yang telah memberikan motivasi dan bimbingan dengan baik.
5. Segenap dosen, karyawan dan laboran Teknik Elektro atas bimbingan, ilmu dan pelayanan yang diberikan selama ini.
6. Laboran TE (Mas Suryo, Mas Mardi, Mas Broto) dan TM (Mas Roni) atas bantuannya.
7. Ayahku (Bapak Saiful) dan Ibuku (Ibu Ning) yang dengan sabar memberikan doa dan semangat.
8. Adikku (Arga) yang selalu memberikan keceriaan dalam keluarga.
9. Kakekku (Mbah Sam) dan Nenekku (Mbah Tati) yang telah memberikan doa dan keteladanan.
DAFTAR ISI... ix
DAFTAR TABEL ... xiii
DAFTAR GAMBAR ... xiv
DAFTAR LAMPIRAN ... xvi
INTISARI... xvii
ABSTRACT... xviii
BAB I. PENDAHULUAN ... 1
I.1. Judul... 1
I.2. Latar Belakang ... 1
I.3. Tujuan dan Manfaat Penelitian ... 2
1.3.1. Tujuan Penelitian ... 2
1.3.2. Manfaat Penelitian ... 2
I.4. Batasan masalah... 3
1.5. Metode Penelitian ... 3
I.6. Sistematika Penulisan ... 4
2.2.1. Konfigurasi Pin ATMega8535 ... 8
2.3. Constant Current Source ……… 9
2.4. Penguat Diferensial ……… 10
2.5. Keypad Matrix ………... 11
2.6. Zero CrossingDetector .………....……….. 12
2.6.1. Transistor Sebagai Saklar ………. 13
2.7. Triac Driver……….... 14
2.8. Triac ……… 16
2.8.1 Zero Point Switching………..……….. 18
2.9. Penampil LCD ……… 18
2.9.1. DDRAM (Display Data RAM) ……… 19
2.9.2. CRAM (Character Generator RAM) ………. 19
2.9.3. CGROM (Character Generator ROM) ……... 19
2.9.4. PIN LCD ... 20
2.10. Regulator Tegangan LM7805 ... 21
BAB III. PERANCANGAN SISTEM ... 24
3.1. Gambaran Umum ... 25
3.2. Perancangan Perangkat Keras ... 25
3.2.1. Rangkaian Sistem Minimal Mikrokontroler ATmega8535 25
3.2.2. Sensor Suhu ... 27
3.3.3. Inisialisasi Port Masukan/Keluaran ... 45
3.3.4. Subrutin Masukan Suhu Melalui Keypad………. 46
3.3.5. Subrutin Ambil Data ……… 49
3.3.6. Diagram Alir LCD ……… 51
3.3.6.1. Subrutin Kirim Data ke Tampilan ……….. 52
BAB IV. HASIL PENGUKURAN DAN PEMBAHASAN ... 54
4.1. Cara Kerja Alat Secara Umum ... 54
4.2. Hasil Pengukuran Suhu Termometer Digital ... 57
4.3. Hasil Pengamatan Sistem Keseluruhan ... 59
4.4. Karakteristik Sensor Suhu ... 60
4.5. Rangkaian Pengondisi Sinyal ... 61
4.6. Zero Crossing Detector... 64
4.7. Triac dan MOC ... 65
4.8. Pengamatan Suhu Air Saat Dipanaskan ... 65
4.8.1. Pengamatan Suhu Air Tanpa Menggunakan Pengaduk ... 66
5.2. Saran... 68
Tabel 3.4. Tombol Keypad dan Fungsinya ... 34
Tabel 3.5.Konfigurasi Pengaturan untuk Port Masukan/Keluaran ... 45
Tabel 4.1. Data Pengukuran Sensor Suhu ... 57
Tabel 4.2. Data Pengukuran Sensor Suhu (lanjutan)... 58
Tabel 4.3. Data Pengamatan Pemanas Air 1000 Watt ………... 59
Tabel 4.4. Data Pengukuran pada Sensor Suhu ... 61
Tabel 4.5. Data Pengukuran pada Rangkaian Pengondisi Sinyal ... 62
Tabel 4.6. Hasil Perhitungan Penguat pada Rangkaian Pengondisi Sinyal .... 63
Tabel 4.7. Pengamatan Suhu Air Tanpa Menggunakan Pengaduk ... 66
Tabel 4.8. Pengamatan Suhu Air dengan Menggunakan Pengaduk ... 67
Gambar 2.2. Pin ATMega8535 ... 9
Gambar 2.3. Rangkaian Current Source ... 9
Gambar 2.4. Penguat Diferensial ... 11
Gambar 2.5. Keypad Matrix ... 12
Gambar 2.6. Vout dan Vin Rangkaian Zero Crossing Terhadap Waktu ……….. 13
Gambar 2.7. Rangkaian Zero Crossing ... 13
Gambar 2.8. Skema dari MOC30XX ... 15
Gambar 2.9. (a) Simbol Triac, (b) Rangkaian Equivalen Triac ………. 16
Gambar 2.10. Kurva Karakteristik Triac ... 17
Gambar 2.11. Prinsip Gelombang Sinus dari Teknik Zero-Point Switching .... 18
Gambar 2.12. Tampilan LCD 2x16 karakter ... 20
Gambar 2.13. Bentuk fisik dari IC LM78XX ... 22
Gambar 2.14. Kapasitor Masukan dan Keluaran Terhadap Regulator LM7805 ... 23
Gambar 3.1. Diagram Blok Perangkat Keras Sistem ... 24
Gambar 3.2. Sistem Minimal ATMega8535 ... 26
Gambar 3.3. Rangkaian Sensor Suhu ... 28
Gambar 3.4. Koneksi Keypad Matrix 4 x 3 ke Mikrokontroler ... 33
Gambar 3.5. Antarmuka Zero Crossing Detektor ... 36
Gambar 3.6. Antarmuka Triac dengan Mikrokontroler ATMega8535 ... 38
Gambar 3.16. Diagram Alir LCD ... 51
Gambar 3.17. Diagram Alir Subrutin Kirim Data ke Tampilan ……….. 52
Gambar 4.1. Tampilan saat alat pertama kali dinyalakan ... 54
Gambar 4.2. Tampilan Saat Keypad Matrix Ditekan Angka 4 ... 55
Gambar 4.3. Tampilan LCD saat pengguna memasukan input berlebihan ... 55
Gambar 4.4. Tampilan LCD saat tombol OK ditekan dengan masukan suhu yang salah ... 55
Gambar 4.5. Tampilan LCD saat tombol OK ditekan dengan masukan suhu yang benar ... 56
Gambar 4.6. Tampilan LCD saat tombol C (cancel) ditekan ... 56
Gambar 4.7. Bentuk Gelombang Masukan dan Keluaran Rangkaian Zero Crossing Detektor ... 64
B. Listing Program ...L2 C. Data Sheet...L3
diferensial. Sedangkan rangkaian pendeteksi sinyal tegangan bolak-balik digunakan sebagai penanda saat sinyal tegangan bolak-balik bernilai nol, dengan tujuan agar dapat menghemat daya saat pemanas dihidupkan.
Rentang suhu yang dapat diatur antara 25˚C-100˚C. Pemanas dapat dinyalakan jika syarat masukan terpenuhi (suhu masukan harus lebih dari atau sama dengan 25˚C, kurang dari atau sama dengan 100˚C dan harus lebih besar dari suhu mula-mula) dan tombol OK ditekan. Jika suhu air telah sama dengan suhu yang diinginkan pengguna, pemanas akan mati dan hidup kembali saat suhu air kurang dari 1,1˚C dari suhu yang diinginkan.
Kata kunci : Pemanas air, Pt100, aplikasi mikrokontroler, pengontrol suhu
This device consists of Pt100 as temperatures sensors, constant current source circuit, differential amplifier circuit, zero crossing detector, a keypad matrix as an input, LCD as a temperature display, and microcontroller ATMega8535 as the main controller. Pt100 has a specification resistance of 100Ω at temperature 0˚C and 139Ω at temperature 100˚C. In order to apply the output of Pt100 as an input of ADC microcontroller ATMega8535, it must pass two step. The first step is that the resistance Pt100 is changed into voltage by applying constant current 1mA from the constant current source. The next step is amplifying the voltage of Pt100 with differential amplifier. The zero crossing detector is used as detector when AC voltage signal goes to zero to save the power when heater is ON.
Temperature can be controlled between 25˚C-100˚C. Heater can be turn ON if the input condition is fulfilled ( input temperature must be more than or equal to 25˚C, less than or equal to 100˚C and more than initial temperature input) and the OK button is pushed. If the water temperature has the same level as the input temperature, heather will be turn OFF and it will be turn ON when the water temperature is less than 1,1˚C from the input temperature.
Keywords : Water heater, Pt100, microcontroller application, temperature control.
1.1. Judul
Pemanas air 1000Watt berbasis mikrokontroler AVR ATMega8535.
1.2. Latar Belakang Masalah
Pemanas air 1000 Watt adalah alat yang digunakan untuk memanaskan dan menjaga suhu air agar konstan sesuai yang diinginkan oleh pengguna. Alat ini digunakan dalam Praktikum Prestasi Mesin di Lab Konversi Energi, Teknik Mesin, Universitas Sanata Dharma. Alat yang dipakai saat ini menggunakan sistem mekanik untuk menjaga suhu air agar konstan pada suhu tertentu, dengan magnetik kontaktor sebagai pengontrol
on/off. Magnetik kontaktor akan on saat suhu turun 1˚C dari suhu yang diinginkan dan off saat suhu naik 1˚C dari suhu yang diinginkan. Keadaan
on/off tersebut menyebabkan magnetik kontaktor cepat rusak dan selain itu juga menimbulkan suara berisik yang mengganggu praktikan.
Oleh karena itu, muncul ide pembuatan alat pengontrol pemanas air 1000 Watt. Alat ini diharapkan dapat memperbaiki kekurangan alat yang telah dibuat sebelumnya, yaitu dengan mengganti pengontrol on/off pemanas air yang sebelumnya menggunakan mekanis menjadi elektronis.
Pemanas air 1000 Watt yang penulis rancang menggunakan keypad matrix sebagai masukan suhu, triac sebagai pengontrol on/off,
mikrokontroler ATMega8535, LCD sebagai penampil dan rangkaian elektronik. Triac dipilih sebagai pengontrol menggantikan magnetik kontaktor karena triac lebih cepat dipicu, sehingga memberikan kontrol yang lebih akurat serta hanya membutuhkan energi yang kecil. Mikrokontroler ATmega8535 dipilih karena mempunyai ADC internal beresolusi 10 bit, sehingga efisien untuk pembuatan alat ini tanpa harus menambah ADC eksternal. Selain itu mikrokontroler ATmega8535 juga memiliki 32 port I/O yang dapat difungsikan sebagai masukan dan keluaran sistem yang sangat penting untuk pengaksesan keypad dan juga LCD.
1.3. Tujuan dan Manfaat Penelitian
1.3.1. Tujuan Penelitian
Membuat suatu peralatan sebagai aplikasi Mikrokontroler ATMega8535 untuk mengendalikan pemanas air 1000 Watt.
1.3.2. Manfaat Penelitian
pengguna dan on saat suhu turun 1˚C dari suhu yang diinginkan. 4. Menggunakan Pt100 sebagai sensor suhu.
5. Menggunakan keypad matrix 4x3 sebagai masukan suhu bagi mikrokontroler ATMega8535.
6. Menggunakan LCD sebagai tampilan suhu dengan ketelitian satu angka di belakang koma.
7. Beban keluaran menggunakan heater 1000Watt.
1.5. Metode Penelitian
Metode penelitian yang digunakan dalam penyusunan dan penulisan Tugas Akhir ini ialah:
1. Perancangan rangkaian berdasar perhitungan teoritis dan kajian pustaka. 2. Pembuatan alat.
1.6. Sistematika Penulisan
Penulisan laporan tugas akhir ini akan disusun dengan sistematika sebagai berikut:
BAB I. PENDAHULUAN
Bab ini berisi latar belakang masalah, tujuan dan manfaat tugas akhir, batasan masalah, metodologi penelitian dan sistematika penulisan laporan.
BAB II. DASAR TEORI
Bab ini berisi teori dari beberapa komponen yang digunakan dalam pembuatan alat pemanas air 1000 Watt berbasis mikrokontroler ATMega8535.
BAB III. PERANCANGAN SISTEM
Bab ini berisi penjelasan perancangan pemanas air 1000 Watt berbasis mikrokontroler ATMega8535.
BAB IV. HASIL PENGUKURAN dan PEMBAHASAN
Bab ini berisi cara kerja alat keseluruhan dan analisis serta pembahasan mengenai hasil tugas akhir yang telah dibuat.
BAB V. PENUTUP
2.1. Sensor Suhu Pt100
Pt100 merupakan tipe sensor suhu yang banyak digunakan dalam industri. Sensor ini memiliki spesifikasi hambatan 100Ω pada suhu 0˚C dan terbuat dari platina yang memiliki akurasi tinggi, murah dan mudah digunakan. Pt100 mempunyai dua variasi, yang umum memiliki hambatan 139,50Ω pada suhu 100˚C dan yang lain memiliki hambatan 139,00Ω pada suhu 100˚C (populer di Jepang). Gambar dan skema Pt100 dapat dilihat pada Gambar 2.1.
(a) (b)
Gambar 2.1. (a) Bentuk fisik Pt100, (b) Skema Pt100.
Sensor Pt100 memiliki akurasi 0,2%, 0,1% dan 0,05% pada suhu 0°C. Semakin tinggi akurasinya semakin mahal harganya. Rentang suhu yang dapat dijangkau Pt100 yaitu antara -200°C sampai dengan 850°C, akan tetapi pada kenyataannya tergantung pada pembuatan probe.
Hambatan rendah pada Pt100 dapat menyebabkan galat pada penunjuk hambatan. Ada dua galat penunjuk hambatan, yaitu offset error
yang disebabkan penunjuk itu sendiri dan galat yang disebabkan oleh panas. Pemanasan internal dapat menyebabkan galat, ini dikarenakan adanya arus yang melewati sensor. Arus yang besar memberikan sinyal yang bagus untuk elektronis tetapi juga memberi galat yang besar. Penggunaan arus yang baik adalah 1mA.
Pada Pt100, perubahan suhu 1°C akan menyebabkan hambatan berubah 0,384Ω. Untuk lebih jelasnya dapat dilihat pada persamaan berikut :
( )
) .1
( A t B t 2
R
Rt = o + Δ + Δ (2-1)
dengan :
A = 3,9083E-3 Ω/°C B = -5,775E-7 Ω/°C2
Ro = Hambatan mula-mula = 100Ω pada 0 °C
Rt = Hambatan saat suhu t
sistem elektronika masa kini. Dengan perkembangan terakhir, yaitu generasi AVR (Alf and Vegard’s Risc Processor), perancang sistem elektronika telah diberi suatu teknologi yang memiliki kapabilitas yang amat maju.
Mikrokontroler AVR memiliki arsitektur RISC (Reduced Instruction Set Computing) 8 bit, dengan semua instruksi dikemas dalam kode 16-bit (16-bits word) dan sebagian besar instruksi dieksekusi dalam 1(satu) siklus
clock.
ATMega8535 memiliki bagian sebagai berikut:
1. Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C dan
Port D.
2. ADC 10 bit sebanyak 8 saluran.
3. Tiga buah Timer/Counter dengan kemampuan pembanding. 4. CPU yang terdiri atas 32 buah register.
5. SRAM sebesar 512 byte.
6. Unit interupsi internal dan eksternal.
2.2.1
Konfigurasi Pin ATMega8535
Kofigurasi pin ATMega8535 bisa dilihat pada Gambar 2.2. Penjelasan secara fungsional sebagai berikut:
1. VCC merupakan pin yang berfungsi sebagai masukan catu daya. 2. GND merupakan pin ground.
3. Port A (PA0..PA7) merupakan pin I/O dua arah dan pin masukan ADC.
4. Port B (PB0..PB7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu Timer/Counter, komparator analog dan SPI.
5. Port C (PC0..PC7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu TWI, komparator analog dan timer oscilator.
6. Port D (PD0..PD7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu komparator analog, interupsi eksternal dan komunikasi serial. 7. RESET merupakan pin yang digunakan untuk membuat
mikrokontroler reset.
8. XTAL1 dan XTAL2 merupakan pin masukan tegangan untuk clock
eksternal.
Gambar 2.2.Pin ATMega8535.
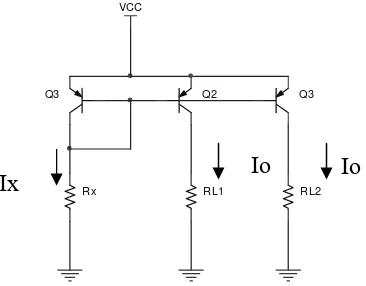
2.3. Constant Current Source
Constant Current source adalah rangkaian yang memberikan sumber arus konstan. Arus yang dihasilkan bernilai sama dengan arus referensinya. Untuk itu, transistor yang digunakan harus identik Vbe maupun betanya. Rangkaian current source dapat dilihat pada Gambar 2.3.
Q2
Q3 Q3
RL1
Rx RL2
VCC
Io Io Ix
Nilai Io sama dengan nilai Ix, sedangkan Ix dicari dari persamaaan :
Ix =
Rx Vbe Vcc−
(2-2)
dengan :
Ix = Arus Referensi (A)
Vcc = Tegangan Catu Daya (V)
Vbe = Tegangan Basis – Emitor ( 0,7V)
Io = Arus Keluaran (A)
2.4. Penguat Diferensial
Gambar 2.4. Penguat Diferensial.
Eo dapat dicari dari persamaan :
Eo =
Rf Ro
(E2 – E1) (2-3)
dengan :
Eo = Tegangan keluaran
Rf Ro
= Penguatan
E1 dan E2 = Tegangan masukan
2.5. Keypad Matrix
KOLOM1 KOLOM2
KOLOM3
BARIS1 BARIS2 BARIS3 BARIS4
Gambar 2.5. KeypadMatrix.
Sistem kerja keypad matrix menggunakan sistem scanning process, yaitu dengan melakukan pemeriksaan terus-menerus oleh mikrokontroler.
Tahap pertama, mikrokontroler menentukan kolom yang akan diperiksa dengan cara mengirimkan data ke suatu baris. Dengan demikian hanya terdapat satu baris yang aktif. Kemudian mikrokontroler akan membaca kolom yang akan ditekan secara satu persatu untuk mengetahui tombol yang ditekan. Cara ini diulang-ulang untuk baris berikutnya sehingga semua kolom diperiksa.
2.6. Zero Crossing Detector
Gambar 2.6. Vout dan Vin Rangkaian Zero Crossing Terhadap Waktu.
2.6.1 Transistor Sebagai Saklar
Transistor dapat digunakan sebagai saklar elektronik untuk komputer dan aplikasi kontrol. Rangkaian pada Gambar 2.7. merupakan rangkaian transistor sebagai saklar yang digunakan untuk pendeteksi perubahan sinyal dari positif ke negatif .
Q5 2N4401 3 2 1 VAC 220V/50Hz 1 2 Vi Rc VCC Rb D1 T1 TRANSFORMER CT 1 5 6
4 8 D2
Gambar 2.7. Rangkaian Zero Crossing.
Sebagai catatan, tegangan keluaran Vc adalah kebalikan dari nilai
masukan yang berasal dari bagian basis. Saat masukan transistor on
dibandingkan nilai Ib pada kurva saturasi. Untuk memperoleh Ib terlebih
dahulu harus dicari Icsat :
Icsat =
Rc Vcc
(2-4)
Untuk level saturasi kita harus dapat memastikan kondisi yang memenuhi syarat :
Ib >
dc Icsat
β (2-5)
Besarnya nilai Ib dapat dihitung dengan menggunakan perhitungan sebagai berikut :
Ib =
Rb V Vi−0,7
(2-6)
Jika syarat diatas terpenuhi, maka nilai keluaran akan sama dengan
ground. Untuk Vi=0V , Ib=0μA dan dapat diasumsikan
, tegangan jatuh pada Rc seperti terlihat , sehingga keluaran akan bernilai tinggi = Vcc. Kondisi ini adalah kondisi saat
transistor off.
mA Iceo
Ic= =0 VRc =Ic.Rc =0V
2.7. Triac Driver
Keluarga MOC30XX dari non-zero crossing triac drivers terdiri dari sebuah LED inframerah aluminium gallium aesenida, digabungkan pada
chip detector silikon. Dua chip ini dirakit pada enam paket pin DIP. MOC30XX menyediakan 7,5KVAC(peak) penyekat antara LED dan detector
Macam-macam MOC30XX dapat dilihat pada Tabel 2.1. Pembedaannya adalah berdasarkan blocking tegangan (VDM) dan arus
pemicu (IFT).
LED AlGaAs memiliki nominal 1,3V forward drop 10mA dan tegangan balik maksimal 3V. Sedangkan arus maksimal yang dapat dilewatkan adalah 60 mA.
Saat dipicu pada kondisi on, detector akan selalu on sampai drop arus dibawah arus holding (umumnya 100 µA). Setelah itu, detector menjadi
off. Detector dapat dipicu on dengan tegangan melebihi tegangan forward blocking atau dengan foton dari LED. LED dijamin dapat memicu detector
menjadi on saat arus yang melewati LED sama, atau lebih dari IFT(MAX).
Bentuk MOC3021 dapat dilihat pada Gambar 2.8.
Tabel 2.1. Macam-macam MOC30XX.
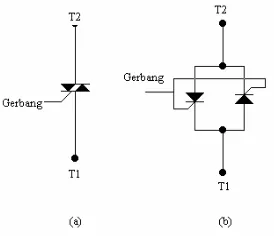
2.8. Triac
Triac adalah Thyristor dua arah yaitu suatu piranti tiga terminal yang dapat melewatkan arus dalam kedua arah melalui jalur utamanya. Terminal-terminal arus utama dikenal sebagai Terminal-terminal utama-1 (T1) dan Terminal-terminal utama-2 (T2), seperti yang ditunjukkan dalam Gambar 2.9. (a).
Gambar 2.9.(a) Simbol Triac, (b) Rangkaian Equivalen Triac.
Gambar 2.10.Kurva Karakteristik Triac.
Karakteristik dari triac dapat dilihat pada Gambar 2.10. Jika tegangan yang dipasangkan pada gerbang sama dengan nol, maka triac
mencegah aliran arus dalam kedua arah dan pada kondisi ini triac berada dalam keadaan blocking. Triac dapat dihidupkan oleh sinyal gerbang positif maupun negatif. Jika terminal T2 adalah positif terhadap T1, maka triac
2.8.1 Zero Point Switching
Zero point switching adalah teknik yang mana triac dipicu on/off
pada periode tertentu. Teknik ini mengurangi turn-on transients dan EMI (elektro-magnetic interference) atau gangguan elektromagnetik. Daya pada beban dikontrol dengan memberikan pecahan dari gelombang sinus penuh pada beban seperti yang terlihat pada Gambar 2.11.
Gambar 2.11.Prinsip Gelombang Sinus dari Teknik Zero-Point Switching.
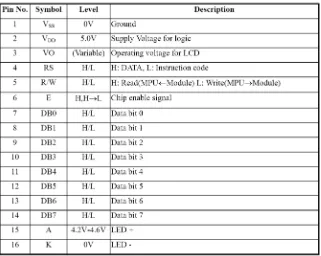
2.9. Penampil LCD
Antarmuka HD44780U dengan mikrokontroler lain dapat dilakukan secara 4 bit dan 8 bit. Untuk pengoperasian 8 bit, dibutuhkan 8 jalur data, yaitu DB0 - DB7 dan untuk pengoprasian 4 bit, dibutuhkan 4 jalur data, yaitu DB4 - DB7. Pengoperasian internal pada layar LCD dikontrol oleh status jalur RS dan R/W.
direpresentasikan dalam bentuk 8 bit kode karakter. DDRAM memiliki kapasitas 80 x 8 bit atau 80 karakter.
2.9.2. CGRAM (
Character Generator
RAM)
CGRAM merupakan RAM (Random access Memory) berukuran 64 x 8 bit yang memungkinkan untuk memprogram karakter yang diinginkan. Namun memori ini akan hilang saat catu daya tidak aktif, sehingga karakter akan hilang.
2.9.3. CGROM (
Character Generator
ROM)
CGROM merupakan ROM (Read Only Memory) berukuran 80 x 8 bit yang mampu membangkitkan bentuk dot matrix berukuran 5 x 8 bit maupun 5 x 10 dari 8 bit kode karakter.
2.9.4. PIN LCD
Gambar LCD dapat dilihat pada Gambar 2.12.
Gambar 2.12. Tampilan LCD 2x16 karakter.
dikirim adalah kode ASCII yang ingin ditampilkan. R/W merupakan Read / Write. Jika R/W = 0, maka menandakan akan diadakan pengiriman data ke LCD. Jika R/W = 1, maka menandakan akan diadakan pengambilan data dari LCD. E (Enable) merupakan sinyal sinkronisasi. Saat E berubah dari 1 ke 0, data di DB0 hingga DB7 akan diterima atau diambil dari atau oleh LCD.
2.10. Regulator Tegangan LM7805
Regulator LM7805 ini adalah IC regulator yang dapat menstabilkan tegangan searah positif dengan masukan 8 volt sampai 20 volt. LM7805 dapat mengeluarkan tegangan maksimum 5,35 V apabila dilengkapi peredam pada heat sink yang memadai dan daya kurang atau sama dengan 15 Watt. IC regulatorseri LM7805 mempunyai karakteristik sebagai berikut: a. Menstabilkan tegangan searah positif dengan masukan dari 8
Volt sampai 20 Volt DC.
b. Tegangan keluaran dapat mencapai 5,35 V.
Seri LM7805 dapat diperoleh dalam kemasan TO-22C plastik dan logam. Gambar 2.13. menunjukkan bentuk fisik dari IC LM78xx yang digunakan dan karakteristiknya ditunjukkan dalam Tabel 2.3.
Gambar 2.13.Bentuk fisik dari IC LM78XX.
Tabel 2.3.Karakteristik Regulator Tegangan Seri 78XX.
Iout (Ampere) Vin (Volt)
Tipe Vout
(Volt) 78xxC 78Lxx 78Mxx Min Max
7805 5 1 0,1 0,5 7,5 20 7809 9 1 0,1 0,5 11 25 7812 12 1 0,1 0,5 14,8 27 7815 15 1 0,1 0,5 18 30
Gambar 2.14. Kapasitor Masukan dan Keluaran Terhadap Regulator LM7805.
Catu daya disusun dari regulator LM7805. Kapasitor masukan digunakan untuk mencegah osilasi dan kapasitor keluaran digunakan untuk memperbaiki tanggapan frekuensi. Fungsi kapasitor masukan dan keluaran terhadap regulator LM7805 adalah untuk memperbaiki respon transient
BAB III
PERANCANGAN SISTEM
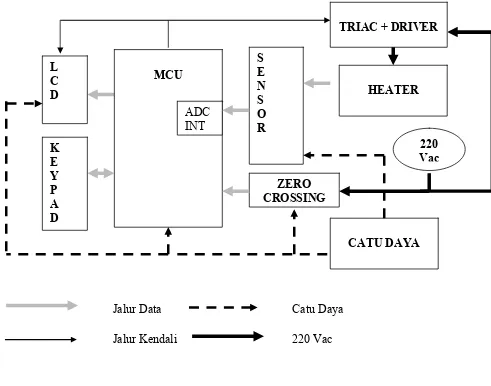
3.1. Gambaran Umum
Diagram blok perangkat keras yang menggambarkan interkoneksi masing-masing komponen sistem terlihat pada Gambar 3.1.
ZERO CROSSING CATU DAYA K E Y P A D L C D MCU ADC INT HEATER S E N S O R
TRIAC + DRIVER
220 Vac
Jalur Data Catu Daya
Jalur Kendali 220 Vac
dicapai, sistem pengendali ini akan tetap mempertahankan suhu tersebut dan akan berhenti beroperasi jika dihentikan oleh pengguna melalui penekanan tombol cancel.
Komponen utama perangkat keras adalah modul LCD HD47780 sebagai penampil, keypad, rangkaian sistem minimal mikrokontroler ATMega8535, triac BT137 beserta driver-nya MOC3021, rangkaian zero crossing detector, heater sebagai objek yang dikendalikan, rangkaian sensor suhu serta rangkaian catu daya.
3.2. Perancangan Perangkat Keras
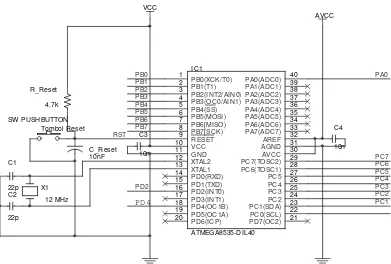
3.2.1. Rangkaian Sistem Minimal Mikrokontroler ATmega8535
PB1 PA0 RST AVCC PB2 PD4 PC6 VCC PB6 PC3 PD2 PC2 PB4 C3 10n Tombol Reset SW PUSHBUTTON PB0 C2 22p PB5 PC4 X1 12 MHz R_Reset 4.7k PB3 PB7 C1 22p C_Reset 10nF IC1 ATMEGA8535-DIL40 3 12 13 2 16 17 18 19 11 10 8 7 6 36 35 34 33 32 37 1 4 5 9 14 15 20 21 40 39 38 31 30 29 28 27 26 25 24 23 22 PB2(INT2/AIN0) XTAL2 XTAL1 PB1(T1) PD2(INT0) PD3(INT1) PD4(OC1B) PD5(OC1A) GND VCC PB7[SCK) PB6[MISO) PB5(MOSI) PA4(ADC4) PA5(ADC5) PA6(ADC6) PA7(ADC7) AREF PA3(ADC3) PB0(XCK/T0) PB3(OC0/AIN1) PB4(SS) RESET PD0(RXD) PD1(TXD) PD6(ICP) PD7(OC2) PA0(ADC0) PA1(ADC1) PA2(ADC2) AGND AVCC PC7(TOSC2) PC6(TOSC1) PC5 PC4 PC3 PC2 PC1(SDA) PC0(SCL) PC7 C4 10n PC5 PC1
Gambar 3.2. Sistem Minimal ATMega8535.
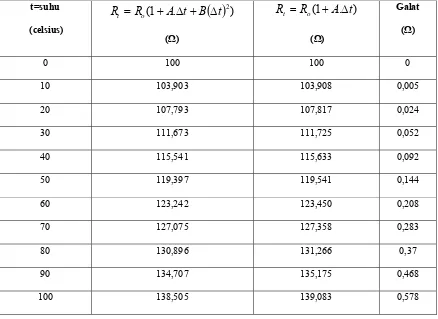
pada Tabel 3.1.
Tabel 3.1. Pengaruh Perubahan Suhu Terhadap Hambatan Pt100.
t=suhu
(celsius)
( )
) .1
( A t B t 2
R
Rt = o + Δ + Δ
(Ω)
) . 1 ( A t R
Rt = o + Δ
(Ω)
Galat
(Ω)
0 100 100 0
10 103,903 103,908 0,005
20 107,793 107,817 0,024
30 111,673 111,725 0,052
40 115,541 115,633 0,092
50 119,397 119,541 0,144
60 123,242 123,450 0,208
70 127,075 127,358 0,283
80 130,896 131,266 0,37
90 134,707 135,175 0,468
100 138,505 139,083 0,578
Dari Tabel 3.1. dapat dilihat pengaruh B.t2 terhadap hambatan Pt100 sangat kecil. Sehingga untuk mempermudah perancangan, nilai
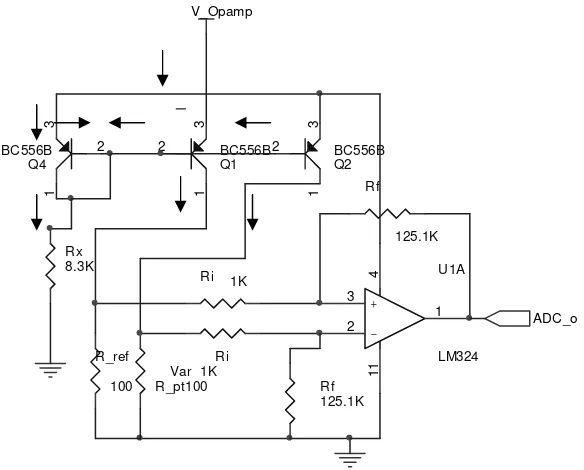
Ri 1K Q1 BC556B 1 2 3 + -U1A LM324 3 2 1 4 11 R_pt100 Var Q2 BC556B 1 2 3 Rx 8.3K ADC_o Q4 556B BC 1 2 3 Rf 125.1K Ri 1K V_Opamp Rf 125.1K R_ref 100
Gambar 3.3. Rangkaian Sensor Suhu.
Rangkaian sensor suhu dapat dilihat pada Gambar 3.3. Rangkaian ini menggunakan sumber arus konstan dengan tujuan agar memperoleh tegangan pada Pt100 yang kemudian akan dipakai sebagai masukan Port
A.0 ADC mikrokontroler ATmega8535. Arus konstan yang digunakan pada perancangan adalah 1mA seperti yang telah dijelaskan pada dasar teori. Arus konstan sebesar 1mA didapat dengan menghitung Rx terlebih
dahulu. Rx dicari dari persamaan (2-2).
Rx =
mA 1 7 , 0 9−
Rx =
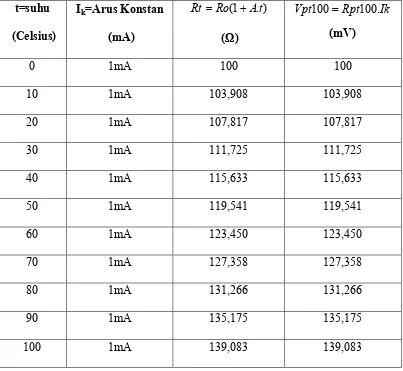
Tabel 3.2. Perubahan Tegangan Pt100 Terhadap Suhu
t=suhu
(Celsius)
Ik=Arus Konstan
(mA)
) . 1 ( At Ro Rt = +
(Ω)
Ik Rpt Vpt100= 100.
(mV)
0 1mA 100 100
Resolusi ADC ATMega8535 adalah 10 bit atau 210 atau 0–1023 desimal. Tegangan referensi ADC yang dipakai adalah 0-5V. Ini berarti masukan tegangan pada Port A.0 sebesar 0 Volt menghasilkan konversi 0 desimal dan masukan 5 Volt menghasilkan konversi 1023 desimal.
Untuk mempermudah konversi ADC, jika masukan ADC adalah 0 Volt, maka diasumsikan suhu air adalah 0˚C dan saat masukannya 5 Volt, maka diasumsikan suhu air adalah 102,3˚C. Sehingga saat suhu 100˚C, tegangan yang masuk ADC adalah sebesar 4,887 Volt. Tegangan 4,887 Volt dicari dari persamaan :
VA =
B xA VM
VA = 1023
1000 5x
VA = 4,887 Volt
Dengan :
VA= Tegangan saat suhu 100˚C
VM=Tegangan referensi ADC (tegangan maksimum yang
dikonversi ADC)
A = Hasil konversi ADC saat suhu 100˚C (desimal) B = Hasil konversi ADC saat suhu 102,3˚C (desimal)
Tegangan 100mV diperoleh dengan mengaliri arus konstan pada resistor Rref. Rref dicari dari persamaan (3-1).
Rref = tan Ikons Vref (3-1) Rref = mA mV 1 100
Rref = 100 Ω
Ri Ro
= 125,056
Jika Ri dipakai sebesar 1KΩ, maka didapat Ro sebesar 125,056KΩ. Karena di pasaran tidak ada, maka dicari pendekatannya sebesar 125,1 KΩ.
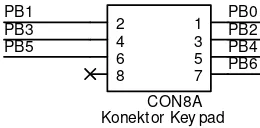
3.2.3. Keypad Matrix
Keypad matrix dibuat dari susunan tombol mekanis (push button)
yang disusun secara matrik 3 kolom dan 4 baris (4 x 3). Keypad ini dihubungkan dengan port B mikrokontroler ATMega8535 dengan keempat baris yang dihubungkan dengan jalur PB0, PB1, PB2 dan PB3. Sedangkan ketiga kolom dihubungkan dengan jalur PB4, PB5 dan PB6. Gambar 3.4. menunjukkan rangkaian keypad dengan mikrokontroler ATMega8535. PB4 PB0 PB2 PB6 PB1 PB3
Konektor Key pad CON8A 1 3 5 7 2 4 6 8 PB5
Gambar 3.4. Koneksi Keypad Matrix 4 x 3 ke Mikrokontroler.
akan terdapat hanya dua buah logika ‘0’ pada kaki-kaki yang terhubung dengan mikrokontroler ATMega8535, seperti yang ditunjukkan pada Tabel 3.3.
Tabel 3.3. Kombinasi Baris dan Kolom Keypad Matrix 4 x 3.
Tombol PB.3 PB.2 PB.1 PB.0 PB.6 PB.5 PB.4
1 1 1 1 0 1 1 0
2 1 1 1 0 1 0 1
3 1 1 1 0 0 1 1
4 1 1 0 1 1 1 0
5 1 1 0 1 1 0 1
6 1 1 0 1 0 1 1
7 1 0 1 1 1 1 0
8 1 0 1 1 1 0 1
9 1 0 1 1 0 1 1
0 0 1 1 1 1 1 0
OK 0 1 1 1 1 0 1
Sedangkan fungsi dari masing-masing tombol keypad diperlihatkan dalam Tabel 3.4.
Tabel 3.4. Tombol Keypad dan Fungsinya.
TOMBOL FUNGSI
1 Angka1
2 Angka2
3 Angka3
4 Angka4
5 Angka5
6 Angka6
7 Angka7
8 Angka8
9 Angka9
0 Angka0
OK Sebagai tombol lanjut
C Sebagai tombol tidak dan batal
3.2.4.
Antarmuka Zero Crossing
’0’ pada mikrokontroler.
2. Saat tegangan masukan ke basis transistor rendah (di bawah 0,7V), tidak ada arus yang melewati basis sehingga transistor off yang membuat tegangan keluaran kolektor transistor tinggi dan memberi logika ‘1’ pada mikrokontroler.
Penentuan nilai Rpull-up (R1) mengacu pada rumus (2-4) :
Rpull-up = I Vcc
; dengan I sebesar 20 mA (Datasheet
Mikrokontroler)
Rpull-up = mA
20 5
Rpull-up = 250 Ω
Karena tidak ada R sebesar 250 Ω di pasaran, maka dicari pendekatannya yaitu 270Ω.
Penentuan nilai Rb (R2) mengacu pada rumus (2 - 6) :
Rb = Ib
Ib = 4mA (Keadaan saturasi terjadi apabila nilai Ib cukup besar) Rb= mA v v 4 7 , 0
5 − = 1,075K Ω
Karena tidak ada R sebesar 1,075KΩ di pasaran, maka dicari pendekatannya yaitu 1KΩ.
Antarmuka zero crossing yang dibentuk oleh transistor 2N4401 ditunjukkan dalam Gambar 3.5.
ON/OFF 1 2 D2 DIODE VAC 220V/50Hz 1 2 D1 DIODE T1 TRANSFORMER CT 1 5 6 4 8 Rc 270 Rb 1k PortD.2 Q5 2N4401 3 2 1 VCC
Gambar 3.5. Antarmuka Zero Crossing Detector.
Fungsi dioda adalah sebagai penyearah gelombang penuh. Fungsi R1 (Rpull-up) adalah mengembalikan logika pada masukan interupsi eksternal supaya menjadi tinggi (5V) saat transistor off.
Untuk mengatur suhu air, pemanas dikendalikan mikrokontroler melalui triac. Triac ini terhubung langsung dengan pemanas / beban dan tegangan jala-jala PLN, 220 VAC. Sebagai pengaman, diperlukan isolator antara mikrokontroler dengan triac. MOC3021 merupakan optoisolator yang terdiri atas sebuah LED yang terhubung secara optis dengan triac. Rangkaian internal driver ini dapat dilihat pada Gambar 2.8.
MOC3021 dipilih berdasarkan kemampuan menahan tegangan ketika dalam keadaan off (VDM) dan arus minimum yang dibutuhkan untuk menyalakan LED. Driver ini dapat dioperasikan untuk menahan tegangan sampai 400 VAC dan memerlukan arus minimum sebesar 15 mA untuk membuatnya on. Kemampuan mikrokontroler untuk mengalirkan arus kira-kira sebesar 20 mA. Dengan demikian tidak diperlukan driver
penguat arus untuk menyalakan MOC3021 ini.
LED menyebabkan triac di bagian keluaran MOC3021 menjadi on dan mengalirlah arus gate triac lewat R1, selanjutnya triac akan on dan pemanas mulai bekerja. Antarmuka triac dengan mikrokontroler ATMega8535 ditunjukkan dalam Gambar 3.6.
R1 270 Q1 TRIAC U1 MOC3021 1 2 6 4 R6 180 PD4 220 VAC Heater R_Load
Gambar 3.6.Antarmuka Triac dengan Mikrokontroler ATMega8535.
Resistor R6 digunakan sebagai pembatas arus masukan LED. LED ini memiliki batasan arus masukan antara 15 - 60 mA dan tegangan panjar maju kurang lebih 1,3V. Nilai resistor maksimum dicari dari pembagian tegangan keluaran pin mikrokontroler setelah dikurangi tegangan panjar maju LED dengan arus minimum yang diperlukan dinyatakan dengan :
R6maks =
mA Vfd Vcc 15 − (3-1)
Menentukan nilai R6:
R6 =
-Karena nilai resistor maksimal adalah 233,3Ω maka dipakai nilai di bawahnya yaitu 180Ω. Sehingga didapatkan nilai Iforward = 19,44mA.
Menentukan R1 :
Vin(pk) = 220 X 2
Vin(pk) = 311,12 Volt
R1 =
ax pk Vin
Im ) (
R1 = 2 , 1
126 , 311
R1 = 259,272Ω
Karena R1 minimum adalah 259,272 Ω maka dipilih R1 = 270 Ω.
3.2.6. LCD (
Liquid Crystal Display
)
Untuk memberikan kemudahan dalam pengoprasian maka dibutuhkan suatu penampil untuk memberikan petunjuk. Untai penampil elektronis berupa LCD 16 x 2 yang dihubungkan dengan mikrokontroler
PC4 PC3 VCC PC5 PC7 Konektor LCD CON14A 1 3 5 7 9 11 13 2 4 6 8 10 12 14 PC6 PC2 R3 POT 1 3 2 PC1
Gambar 3.7. Untai Elektronis Penampil LCD.
Untuk mengatur kecerahan LCD digunakan trimpot 10K, resistor 1K berfungsi sebagai pembatas tegangan jika trimpot yang berfungsi juga sebagai pembagi tegangan berada pada hambatan minimum. Dengan demikian kecerahan LCD dapat dibatasi sehingga LCD tidak cepat rusak. Untai elektronis LCD dapat dilihat pada Gambar 3.7.
Pin 1 dihubungkan ke Ground, Pin 2 dihubungkan ke Vcc yaitu sebesar 5V dan Pin 3 merupakan tegangan variabel (contrast input).
Enable terhubung pada port C.3 dan RS terhubung dengan port C.1. Sedangkan yang lainnya digunakan sebagai jalur data (DB4 - DB7).
3.2.7. Rangkaian Catu Daya
Gambar 3.8. Rangkaian Catu Daya dengan MikrokontrolerATMega8535.
3.3. Perancangan perangkat lunak
3.3.1. Algoritma Program
1. Program dimulai dengan inisialisasi, yaitu antara lain inisialisasi keluaran (LCD) dan variabel .
2. Scan tombol masukan dilakukan terus-menerus pada program utama. 3. Menyalakan pemanas dengan memicu triac menggunakan
mikrokontroler.
4. Ambil datadan kirim ke LCD.
5. Jika suhu air sama dengan suhu masukan keypad, maka pemanas akan mati dan interupsi eksternal nol diaktifkan.
6. Triac dipicu on/off agar suhu air stabil sesuai dengan masukan pengguna.
7. Program kemudian menunggu apakah ada masukan baru yang diterima mikrokontroler ATMega8535 yang masuk lewat keypad matrix.
3.3.2. Diagram Alir Program Utama
Diagram alir program utama dapat dilihat pada Gambar 3.9. Mulai
Inisialisasi masukan, keluaran dan variabel.
Ambil data
Kirim Data ke Tampilan
C
Gambar 3.10.Diagram Alir dari Program Utama (lanjutan). Tidak
Ya
Ya Ya
Tidak
Tombol Cancel ditekan?
Suhu yang diinginkan telah dicapai?
A
B Nyalakan
Pemanas
Matikan Pemanas Suhu masukan ≤100˚C?
Suhu masukan <suhu mula-mula air?
C Ambil data
Kirim Data ke Tampilan
Ya
Tidak Suhu masukan ≥25˚C?
Tidak
Ya Tidak Tidak
Tidak
Ya Ya
Tidak A
Interupsi Eksternal 0= 1
Ambil Data Tombol Cancel ditekan?
B Matikan pemanas
Suhu air turun 1 oC dari suhu yang
diinginkan ?
Suhu = suhu Masukan?
Matikan pemanas Nyalakan triac
Kirim data ke tampilan
Ya
port. Tabel 3.5. menunjukkan untuk pengaturan port I/O.
Tabel 3.5.Konfigurasi Pengaturan untuk Port Masukan / Keluaran.
DDR bit = 1 DDR bit = 0
Port bit = 1 Keluaran Tinggi Masukan Pull-Up
Port bit = 0 Keluaran Rendah Masukan Floating
3.3.4. Subrutin Masukan Suhu Melalui Keypad
Keypad yang digunakan adalah keypad dalam bentuk matrik 4x3. Untuk mengenali penekanan tombol keypad, maka keadaan setiap tombol pada keypad harus diperiksa terus-menerus. Diagram alir pengenalan
keypad diperlihatkan pada Gambar 3.12.
Proses pembacaan keypad dimulai dengan pengiriman kondisi ‘0’ pada masing-masing baris secara bergantian yang kemudian dilakukan dengan pembacaan data pada kolom. Setiap penekanan tombol keypad
Inisialisasi
Baca data kolom 1 Baris 1 = 0 Siapkan data
scan tombol
Kolom 1
= 0 Simpan hasil
Baca data kolom 2
Kolom 2
= 0 Simpan hasil
Baca data kolom 3
Kolom 3
= 0 Simpan hasil
Baca data kolom 1
Kolom 1
= 0 Simpan hasil Baris 2 = 0
Baca data kolom 2
A E B Ya Tidak Tidak Ya Ya Ya Tidak Tidak
Gambar 3.13.Diagram Alir Keypad (lanjutan). Baris 3 = 0
Simpan hasil
Baca data kolom 2
Kolom 2 = 0 Simpan hasil
Baca data kolom 2
Simpan hasil
Baris 4 = 0 Baca data kolom 1
Baca data kolom 1
C
D
Kolom 1 = 0
Kolom 3 = 0
Ya
Ya Tidak
Tidak
Simpan hasil
C
Simpan hasil
Baca data kolom 2 Kolom 1 = 0
Baca data kolom 3 Kolom 2 = 0
Simpan hasil Kolom 3 = 0
Selesai
E
B D
Gambar 3.14.Diagram Alir Baca Suhu dari Keypad (lanjutan).
Pemilihan channel 0 pada register
ADMUX
Set frekuensi ADC (clock), ADC Enable, Free-Running
Mode, Set flag, enable int.
Mulai konversi
Tunggu Konversi
Simpan Hasil Ke Variabel
Selesai
Gambar 3.15.Subrutin Ambil Data.
ADMUX diset ’1’. Untuk memilih tegangan referensi yang berasal dari pin AREF, bit RFS1 dan RFS0 dibiarkan tetap bernilai ‘0’. Terlebih dahulu ADC diaktifkan dengan memberi logika ’1’ bit ADC Enable pada register ADCSRA. Karena bila tidak terlebih dulu diaktifkan, pemilihan saluran ADC dan tegangan referensi tidak berpengaruh.
Mode yang digunakan adalah Free Running, dilakukan dengan memberi logika ’1’ bit ADATE. Frekuensi ADC ATMega8535 berkisar antara 50-1000 kHz. Untuk mendapatkan resolusi maksimal (10 bit), ADC dioperasikan pada frekuensi 50-200 kHz (ATMega8535 Datasheet). Clock
frekuensi ADC didapatkan dari clock kristal dibagi dengan prescaler. Kristal yang dipakai 12 MHz dan prescaler dipilih sebesar 64. Sehingga didapatkan frekuensi ADC sebesar 12 MHz/64 = 187,5 kHz. Prescaler 64 didapatkan dengan memberi logika ’1’ bit ADPS2 dan ADPS1.
Setelah bit tersebut selesai, proses konversi dapat segera dilakukan dengan memberi logika ’1’ bit ADSC (ADC Start Conversion). Pertama kali proses konversi, membutuhkan waktu sebesar 25 siklus. Proses selanjutnya memerlukan 13 siklus. Dengan frekuensi 187,5 kHz, maka waktu yang dibutuhkan masing-masing sebesar 133,33 mikrodetik dan 69,33 mikrodetik.
Tunggu 15 ms atau lebih
Kirim Data 30H
Pengesetan fungsi, kirim data 20H Tunggu 100 us atau lebih Tunggu 4,1 ms atau lebih
Kirim Data 30H
Kirim Data 30H
Matikan penampil, kirim data 01H
Kosongkan Tampilan, kirim Data 01H
Mode di-set
Selesai
Gambar 3.16.Diagram Alir LCD.
LCD memerlukan waktu untuk menunggu VCC naik mencapai 4,5
tunda waktu sebesar 20mS. Pin R/W tidak perlu diberi logika rendah karena pada perangkat kerasnya sudah dihubungkan ke ground, yang berarti selalu menulis ke LCD. Hal ini bisa dilakukan karena pengiriman instruksi ke LCD selalu diikuti dengan tunda waktu. Subrutin kirim perintah digunakan untuk memberi logika rendah pada pin RS, mengirim data instruksi ke LCD dan membuat perubahan pada masukan enable clock LCD.
3.3.6.1. Subrutin Kirim Data ke Tampilan
Gambar 3.17. menunjukkan diagram alir subrutin kirim data ke tampilan
mulai
RW=0
RS=1
E=0 E=1
Kirim data ke Jalur
Selesai
BAB IV
HASIL PENGUKURAN DAN PEMBAHASAN
Pengamatan terhadap pemanas air 1000Watt berbasis mikrokontroler ATMega8535 dilakukan tiap blok. Blok yang dibuat pada perancangan meliputi sensor suhu, rangkaian pengondisi sinyal, ADC, mikrokontroler, keypad matrix,
zero crossing, triac serta penampil LCD.
Pengamatan dilakukan pada keluaran sensor suhu yang berupa tegangan, rangkaian pengondisi sinyal yang berupa tegangan, rangkaian zero crossing
berupa tegangan, juga serta keluaran ADC yang berupa desimal 0-1023 dan suhu 0 – 100˚C pada LCD. Media pengamatan adalah suhu air hasil pemanas listrik. Saat pengambilan data dilakukan, suhu udara ruangan adalah 28˚C.
4.1. Cara Kerja Alat Secara Umum
Saat saklar dihidupkan, LED indikator catu daya akan menyala. LCD akan menampilkan seperti Gambar 4.1.
Pengendali Pemanas Air
Suhu : 30.0 C Masukkan Suhu!
Gambar 4.1. Tampilan saat alat pertama kali dinyalakan.
Jika masukan berlebihan (lebih dari 4 digit), maka akan muncul peringatan. Tampilan LCD dapat dilihat pada Gambar 4.3.
Suhu : 30.0 C Masukkan Suhu! Masukan Berlebihan Suhu : 30.0 C
4444
Gambar 4.3. Tampilan LCD saat masukan pengguna berlebihan.
Saat tombol OK ditekan :
1. Jika masukan salah (suhu masukan < 25˚C atau > 100˚C dan < suhu tampilan), maka tampilan LCD seperti ditunjukkan pada Gambar 4.4.
Masukan Salah
Suhu : 30.0 C Masukkan Suhu! Suhu : 30.0 C
25
2. Jika masukan benar, maka proses selanjutnya adalah pembandingan, dengan tampilan LCD seperti ditunjukkan Gambar 4.5.
Suhu : 30.0 C 35 C Suhu : 30.0 C
35
Gambar 4.5. Tampilan LCD saat tombol OK ditekan dengan masukan suhu yang benar.
3. Saat tombol C ditekan, akan kembali ke tampilan awal (perintah masukan suhu). Dengan tampilan LCD seperti ditunjukkan Gambar 4.6.
Suhu : 30.0 C Masukkan Suhu! Suhu : 30.0 C
35 C
Gambar 4.6. Tampilan LCD saat tombol C (cancel) ditekan.
Jika masukan suhu sudah benar, tombol OK ditekan dan rangkaian
suhu pada LCD dengan termometer air raksa. Suhu air pada LCD ditampilkan dalam bentuk derajat celsius dengan ketelitian 1 angka di belakang koma. Hasil pengukurannya dapat dilihat pada Tabel 4.1.
Tabel 4.1. Data Hasil Pengukuran Suhu. No Pembacaan
termometer
referensi
(˚C)
Rata-rata
suhu
tampilan
(˚C)
Galat
(˚C)
1 30 32,7 2,7
2 35 37,2 2,2
3 40 42,5 2,5
4 45 46,3 1,3
5 50 51,2 1,2
6 55 55,9 0,9
7 60 60,6 0,6
8 65 65,3 0,3
Tabel 4.2. Data Hasil Pengukuran Suhu (lanjutan).
No Pembacaan
termometer
referensi
(˚C)
Rata-rata
suhu
tampilan
(˚C)
Galat
(˚C)
9 70 70,0 0
10 75 74,6 0,4
11 80 78,1 1,9
12 85 84,0 1
13 90 88,7 1,3
14 95 92,3 2,7
Galat rata-rata 1,3 Catatan : suhu ruang = 28˚C
pemanas off detik setelah
pemanas off
pemanas on
1 25 25 25,5 23,9
2 32 32 32,5 30,9
3 34 34 34,9 32,9
4 36 36 36,5 34,9
5 38 38 38,5 36,9
6 40 40 40,9 38,9
7 42 42 42,2 40,9
8 44 44 44,9 42,9
9 46 46 46,4 44,9
10 48 48 48,5 46,9
11 50 50 50,5 48,9
Pemanas air 1000 Watt akan mulai memanaskan air jika suhu yang akan dicapai telah dimasukan dan tombol OK ditekan. Suhu masukan harus memiliki kriteria sebagai berikut :
a. 25˚C ≤ suhu masukan ≤ 100 ˚C
Dari Tabel 4.3. dapat dilihat bahwa pemanas akan off saat suhu yang diinginkan telah tercapai dan akan on lagi jika suhu turun 1,1˚C. Saat pemanas telah off, suhu air masih tetap bertambah. Ini disebabkan karena suhu pada air saat dipanaskan tidak langsung merata. Penempatan sensor suhu juga berpengaruh pada pembacaan suhu, sebaiknya sensor diletakkan 15cm dari pemanas. Data pengamatan dapat dilihat pada Tabel 4.7. dan Tabel 4.8. Untuk pengamatan pada suhu 100˚C, tidak dapat dilakukan karena titik didih air hanya sampai 95˚C.
4.4. Karakteristik Sensor Suhu
Sensor suhu elektronis yang digunakan pada perancangan ini adalah Pt100 yang mempunyai karakteristik akan mengeluarkan tegangan sebesar 0,384mV tiap kenaikan 1˚C. Dengan demikian dibuat suatu pengujian terhadap kerja sensor dengan mengukur tegangan keluaran dari sensor.
Pengukuran dilakukan dengan menggunakan multimeter air raksa sebagai termometer referensi. Hasil keluaran tegangan sensor dicatat untuk mendapatkan karakteristik data hasil pengukuran pada blok ini. Hasil pengukuran dapat dilihat pada Tabel 4.4.
3 38 116 114 2
4 43 118 116 2
5 51 120 119 1
6 55 122 121 1
7 61 124 123 1
8 66 127 125 2
9 72 129 127 2
10 77 130 129 1
11 81 132 131 1
12 89 135 134 1
13 91 137 135 2
14 95 140 136 4
Galat rata-rata 1,571
4.5. Rangkaian Pengondisi Sinyal
keluaran penguat diferensial sebesar 0,048V. Data hasil pengukuran dapat dilihat pada Tabel 4.5.
Tabel 4.5. Data Pengukuran pada Rangkaian Pengondisi Sinyal.
No Pembacaan
termometer
referensi (˚C)
Pembacaan tegangan
Keluaran pengondisi
sinyal (V)
Teg. Keluaran pengk.
Sinyal yang diharapkan
(V)
Galat
1 28 1,50 1,36 0,14
2 32 1,73 1,56 0,17
3 38 1,99 1,85 0,14
4 43 2,21 2,1 0,11
5 51 2,46 2,49 0,03
6 55 2,75 2,68 0,07
7 61 2,95 2,98 0,03
8 66 3,21 3,22 0,01
9 72 3,48 3,51 0,03
10 77 3,73 3,76 0,03
11 81 3,88 3,95 0,07
12 89 4,16 4,34 0,18
13 91 4,39 4,44 0,05
14 95 4,64 4,64 0
Galat rata-rata 0,075
Tabel 4.6. Hasil Perhitungan Penguat pada Rangkaian Pengondisi Sinyal
No Pembacaan
termometer
referensi
(˚C)
Pembacaan tegangan keluaran penguat diferensial (V) Pembacaan tegangan Masukan penguat diferensial (V) Penguatan
1 28 1,50 11 136,363
2 32 1,73 13 133,076
3 38 1,99 16 124,375
4 43 2,21 18 122,777
5 51 2,46 18 136,667
6 55 2,75 20 137,500
7 61 2,95 22 134,090
8 66 3,21 25 128,400
9 72 3,48 26 133,846
10 77 3,73 27 138,148
11 81 3,,88 29 133,793
12 89 4,16 32 130,000
13 91 4,39 34 129,176
14 95 4,64 37 125,405
4.6. Zero Crossing Detector
Zero crossing detector pada rangkaian ini digunakan sebagai penanda saat gelombang AC bernilai nol, dengan tujuan menghemat daya saat pemanas on. Data pengamatan rangkaian zero crossing dapat dilihat pada Gambar 4.7.
Gambar 4.7. Bentuk Gelombang Masukan dan Keluaran Rangkaian Zero Crossing Detector.
Gambar 4.7. membuktikan bahwa rangkaian zero crossing detector
sudah bekerja sebagaimana mestinya. Tegangan basis-emitor (Vbe) saat
MOC digunakan sebagai pengaman saat menghubungkan triac pada mikrokontroler.
Pengamatan pada bagian ini diperoleh data sebagai berikut: a. Saat pemanas on, tegangan MOC = 1,507V.
b. Saat pemanas off, tegangan MOC = 0V.
Dari data diatas dapat disimpulkan triac dan MOC sudah bekerja dengan baik sesuai dengan perancangan, yaitu :
a. Saat pemanas on, tegangan MOC = 1,5V b. Saat pemanas off, tegangan MOC = 0V
4.8. Pengamatan Suhu Air Saat Dipanaskan
Pengamat ini bertujuan untuk membuktikan bahwa penempatan sensor sangat penting untuk mendapatkan hasil suhu yang benar dan juga untuk membuktikan bahwa suhu air tidak langsung merata segera setelah pemanas dinyalakan.
pengaduk dan tahap kedua adalah pengamatan saat wadah dipanaskan dengan menggunakan pengaduk.
4.8.1. Pengamatan Suhu Air Tanpa Menggunakan Pengaduk
Pengamatan ini menggunakan tiga termometer dengan jarak yang bervariasi dengan pemanas yaitu termometer I berjarak 3cm, termometer II berjarak 15cm dan termometer III berjarak 20cm. Suhu awal saat pengamatan adalah 25˚C. Hasil pengukuran ketiga termometer dapat dilihat pada Tabel 4.7.
Tabel 4.7. Pengamatan Suhu Air Tanpa Pengaduk.
No Waktu Termometer I
(˚C)
Termometer
II
(˚C)
Termometer
III
(˚C)
1 15 detik 25 25 25 2 31 detik 31 25 25 3 2 menit 38 26 25 4 3 menit 43 29 25 5 4 menit 48 34 25
pada Tabel 4.8.
Tabel 4.8. Pengamatan Suhu Air dengan Menggunakan Pengaduk.
No Waktu Termometer I
(˚C)
Termometer II
(˚C)
Termometer III
(˚C)
1 10 detik 48 37 36 2 1 menit 48 40 39 3 1.30 menit 49 42 40 4 2 menit 50 44 41 5 3 menit 52 46 42 6 4.30 menit 56 48 47 7 5 menit 60 50 48
BAB V
PENUTUP
5.1. Kesimpulan
Setelah dilakukan perancangan, pengamatan dan pengujian terhadap peralatan yang telah dibuat maka dapat diambil beberapa kesimpulan sebagai berikut :
1. Alat ini memiliki galat rata-rata lebih kecil jika dibandingkan alat yang pernah dibuat yaitu 1,3˚C, sehingga alat ini sudah bekerja dengan baik. 2. Saat suhu yang diinginkan telah tercapai, pemanas akan langsung off dan
akan on kembali jika suhu air kurang dari 1,1˚C.
3. Saat pemanas off, suhu air masih naik. Ini disebabkan panas air yang tidak langsung merata setelah dipanaskan.
5.2. Saran
1. Agar tegangan keluaran penguat diferensial lebih presisi, maka perlu menggunakan op-amp yang lebih baik dan dilengkapi pengatur offset. 2. Agar penggunaan daya pada pemanas dapat diatur, maka dapat digunakan
metode lain dalam memicu triac yaitu dengan phase control methods. Dengan menggunakan metode ini, pemakaian daya pada pemanas dapat lebih hemat.
Description: 1. Menampilkan data dr sensor suhu scr terus menerus 2. User memasukan data mll keypad
3. Pengontrol membandingkan nilai masukan dengan nilai saat ini
4. Jika masukan > saat ini, heater di nyalakan ttp menunggu ZC aktif
5. Setelah suhu tercapai, heater dimatikan dan dinyalakan kembali jika suhu tdk sesuai
Konfigurasi I/O :
LCD : PortC --> lihat lcd.h keypad : PortB --> lihat keypad.c
ADC : PortA.0
ZC : PortD.2
MOC Driver : POrtD.4 (aktif 1) Led indicator : PortD.5 (aktif 1)
****************************************************************** ************************************/ #include <avr/io.h> #include <avr/interrupt.h> #include <avr/signal.h> #include <util/delay.h>
#include "lcd.h" // konfigurasi I/O LCD pada Mikrokontroler
#define PORT_KEYPAD PORTB //Keypad di hubungkan
dengan portA
#define DDR_KEYPAD DDRB
#define PIN_KEYPAD PINB
char key_input=0x20; //karakter spasi
int hasil_konversi=0,z=0,temp=0,key_temp=0,init=0,key_on; volatile int interup=0;
// Deklarasi fungsi dan variabel
int ribuan,ratusan,puluhan,satuan=0x30; int suhu[3];
float temp_suhu=0;
avr_init();
while(init==1) {
tampilkan_suhu();
kunci() ;
switch (key_input)
{
case ('*'): // jika ketemu tombol cancel, langsung reset saja main();
break;
case ('#' ): // tombol ok ditekan
if (z==0) main();else
{lcd_gotoxy(8+z,1); lcd_putc('C');
banding(); // jika 1st kali ditekan adlh ok, reset saja lainnya bandingkan
} break;
default:
if (z==0 && key_input >=0x30) // jika pertama kali nulis, layar dihapus
{ lcd_gotoxy(0,1); lcd_puts(" "); proses_key();
}
else if (key_input >=0x30)proses_key();
else if (z>=4)
} } }
void banding (void) {
if ((key_temp>=25) && (key_temp <=100) && (key_temp > (temp_suhu)) ) // jika semua parameter sudah dipenuhi
{ heater_on();}
else {
lcd_clrscr();
lcd_puts(" Masukan Salah"); _delay_s(90);
main(); } }
void heater_on (void)
// Pemanas mulai dinyalakan sampai suhu yg diinginkan tercapai. Jika telah di capai maka suhu
// dipertahankan. Lihat loop.
{
PORTD = 0b00110000; // langsung nyalakan pemanas
for(;;) { kunci();
if (key_input=='*')main();
if (temp_suhu >= ( key_temp ) ) {PORTD = 0b00000000;} // jika suhu pemanas sudah tercapai, proses selanjutnya
// mempertahankan suhu dgn on off pemanas
// matikan pemanas
key_on=key_temp-2;
if (temp_suhu <= key_on ) {ok = 1;}
{
lcd_gotoxy(7+z,1); lcd_putc(key_input);
// diubah dr char ke int
temp=key_input-'0'; key_temp*=10; key_temp+=temp;
z=z+1;
}
void scan_keypad (void) //
{
kunci() ;
lcd_clrscr(); lcd_gotoxy(7,1); lcd_putc(key_input);
return; }
char kunci (void) {
key_input=0x20;// kar spasi DDR_KEYPAD=0x0F;
{ key_input='1';
delay_keypad(); }
if(bit_is_clear(PIN_KEYPAD,5) && bit_is_clear (PIN_KEYPAD,0)) { key_input='2';;
delay_keypad(); }
if(bit_is_clear(PIN_KEYPAD,6) && bit_is_clear (PIN_KEYPAD,0)) { key_input='3'; delay_keypad(); } //b2 PORT_KEYPAD=0b11111111; PORT_KEYPAD=0b11111101; delay_keypad();
if(bit_is_clear (PIN_KEYPAD,4) && bit_is_clear (PIN_KEYPAD,1)) { key_input='4';
delay_keypad(); }
if(bit_is_clear (PIN_KEYPAD,5) && bit_is_clear (PIN_KEYPAD,1)) { key_input='5';
delay_keypad(); }
if(bit_is_clear(PIN_KEYPAD,6) && bit_is_clear (PIN_KEYPAD,1)) { key_input='6'; delay_keypad(); } //b3 PORT_KEYPAD=0b11111111; PORT_KEYPAD=0b11111011; delay_keypad();
if(bit_is_clear (PIN_KEYPAD,4) && bit_is_clear (PIN_KEYPAD,2)) {
key_input='7'; delay_keypad(); }
if(bit_is_clear (PIN_KEYPAD,5) && bit_is_clear (PIN_KEYPAD,2)) {
}
if(bit_is_clear (PIN_KEYPAD,5) && bit_is_clear (PIN_KEYPAD,3)) {
key_input='0'; delay_keypad(); }
if(bit_is_clear(PIN_KEYPAD,6) && bit_is_clear (PIN_KEYPAD,3)) {
key_input='#'; delay_keypad(); }
return key_input;
}
static void delay_keypad(void) {int a; for(a=2;a>0;a--) { TCCR0=0x05; TCNT0=0x01; while(TCNT0!=0xff){} } }
volatile int ubah_ascii (int ex)
{ while(ex>=1000){ex-=1000;ribuan +=1;} while (ex>=100) { ex-=100; ratusan +=1;} while (ex>=10) { ex-=10; puluhan +=1;} while (ex>0) { ex-=1; satuan+=1; }
ADMUX = 0; // PIN A0 sbg masukan ADC
float sum=0;
for (int i=1;i<=100;i++) {
ADCSRA |= _BV(ADSC); // wait until converstion completed while (ADCSRA & _BV(ADSC) ) {}
sum+ = ADCW; }
hasil_koversi=sum/100
temp_suhu = hasil_konversi/10;
ubah_ascii(hasil_konversi); //tampilkan hasil_konversi ke LCD baris 1st. lcd_gotoxy(8,0); lcd_putc(ribuan); lcd_gotoxy(9,0); lcd_putc(ratusan); lcd_gotoxy(10,0); lcd_putc(puluhan); lcd_gotoxy(11,0); lcd_putc('.'); lcd_gotoxy(12,0); lcd_putc(satuan); lcd_gotoxy(13,0); lcd_putc('C'); _delay_s(25);
ribuan=0x30;ratusan=0x30;puluhan=0x30;satuan = 0x30; }
// inisialisasi meliputi ADC, interupsi, static void avr_init(void)
{
//--- inisialisasi lcd & tampilan awal --- if (init==0)
{
lcd_init(LCD_DISP_ON); lcd_clrscr();
lcd_gotoxy(0,0);
lcd_puts(" Pengendali\n Pemanas Air"); _delay_s(200);
lcd_clrscr();
ADCSRA=0b10000110;
//--- inisialisasi variabel lain --- z=0,key_temp=0,temp=0;
return; }
static void _delay_s(double __s) { int j=0;
for(j=__s;j>0;j--) {
TCCR0=0x05;// prescaler = 1024, shg clock timer 12mHz / 1024 =11718,75 Hz ---->85,33333 uS
TCNT0=0x01;// 21,67466666666 mS
while(TCNT0!=0xff){} }