LAMPIRAN 1
A. Gambar Inkubator
(Bahan Inkubator) (Ukuran dan Massa Inkubator)
(Lapisan isolator Inkubator) (Inkubator dilapisi bahan isolator kayu)
B. Gambar Rangkaian Power Supply
(Trafo pada Rangkaian Power Supply (Rangkaian Power Supply)
C. Gambar Inkubator dan Rangkaian Pemanas Induksi
(Inkubator tampak dari depan)
1. Program Alat Pada Mikrokontroler dengan Code Vision AVR
/***************************************************** This program was produced by the
CodeWizardAVR V1.25.9 Standard Automatic Program Generator
© Copyright 1998-2008 Pavel Haiduc, HP InfoTech s.r.l. pranala:http://www.hpinfotech.com
Project : Version :
Date : 10/20/2016
Chip type : Atmega8535 Program type : Application
AVR Core Clock frequency : 16.000000 MHz Memory model : Small
External RAM size : 0 Data stack size : 128
*****************************************************
#include <mega8535.h> #include <stdlib.h> #include <delay.h>
// Declare your global variables here
void main(void) {
//PORTA initialization
PORTD=0x00;
.equ __lcd_port=0x15 ;PORTC #endasm
// Read the AD conversion result
ADMUX=adc_input | (ADC_VREF_TYPE & 0xff);
// Delay needed for the stabilization of the ADC input voltage delay_us(10);
// Start the AD conversion ADCSRA|=0x40;
// Wait for the AD conversion to complete while ((ADCSRA & 0x10)==0);
ADCSRA|=0x10; return ADCW; }
// Declare your global variables here
void main(void) // Clock value: Timer 0 Stopped // Mode: Normal top=FFh // OC0 output: Disconnected TCCR0=0x00;
// Timer/Counter 1 initialization // Clock source: System Clock // Clock value: Timer 1 Stopped // Mode: Normal top=FFFFh // OC1A output: Discon. // OC1B output: Discon. // Noise Canceler: Off
// Input Capture on Falling Edge // Timer 1 Overflow Interrupt: Off // Input Capture Interrupt: Off // Compare A Match Interrupt: Off // Compare B Match Interrupt: Off TCCR1A=0x00; // Clock value: Timer 2 Stopped // Mode: Normal top=FFh // OC2 output: Disconnected ASSR=0x00;
OCR2=0x00;
// Communication Parameters: 8 Data, 1 Stop, No Parity // USART Receiver: On
// Analog Comparator Input Capture by Timer/Counter 1: Off ACSR=0x80;
SFIOR=0x00; // ADC initialization
// ADC Clock frequency: 750.000 kHz // ADC Voltage Reference: AVCC pin // ADC High Speed Mode: Off
2. Program Antarmuka Komputer menggunakan Software Visual Basic 6.0.
/***************************************************** Private Sub Form_Load()
Timer1.Enabled = False MSComm1.PortOpen = True
Text1(0).Text = 99 - VScroll2.Value Text1(1).Text = 59 - VScroll1.Value Text2(0).Text = ""
Label1(5).Caption = Chr(176) & "C" End Sub
Private Sub Command1_Click() 'Run/Stop
Timer1.Interval = (Val(Text1(0).Text) * 60 + Val(Text1(1).Text)) * 1000 If Timer1.Enabled = False Then
End Sub
Private Sub MSComm1_OnComm() xx = MSComm1.Input
On Error GoTo errhand
Text2(0).Text = Asc(Left(xx, 1)) Text2(1).Text = Asc(Right(xx, 1)) With Adodc1.Recordset .
AddNew ! jam = Time !
suhu = Val(Text2(0).Text) !. Update
End With
Adodc1.Recordset.Requery Adodc1.Recordset.MoveLast errhand:
DAFTAR PUSTAKA
AN9012. (2000).”Induction Heating System Topology Review”, Fairchaild semiconductor.
AND9166/D. (2014).“Induction Cooking”, Semiconductor Components Industries.
Habibi. (2007).“Pembangkitan Tegangan Tinggi AC Menggunakan Kumparan Tesla”.Tugas Akhir.UNDIP
Khotimah, K. (2015). “Prototipe Alat Reaktor Pirolisis Untuk Konversi Plastik Menjadi Bahan Bakar Dengan Sistem Pemanas Induksi”. Tugas
Akhir. Politeknik Negeri Sriwijaya.
Nugroho, K. (2015). “Pengembangan Tungku Pemanas Induksi Berbasis
Mikrokontroler ARM untuk Pemrosesan Logam Skala Labratorium”. WordPress
Raharjo, W. (2013). “Rancang Bangun Pemanas Induksi Berkapasitas 600 W untuk Proses Perlakuan Panas dan Permukaan”.Jurnal. UNS.
Sandi, P. (2010).“Perancangan Inverter Resonan Seri Frekuensi Tinggi Sebagai Suplai Pemanas Induksi Pada Alat Pemanas Bearing”.Tugas Akhir. UNDIP
Semiatin, S.L. (1986).” Induction Heat Treating of Steel”. American Society for Metals.
Sudirham, Sudaryatno. (2010).“Analisis Rangkaian Listrik”. Bandung. ITB
Satriansyah, Adam. (2011).“Rangkaian AC Paralel R-L-C”. http://sextrusion.con.tw. Diunduh tanggal 27/2/2015
BAB III
METODOLOGI PENELITIAN
3.1. SISTEM SECARA UMUM
Pada bab 3 ini akan dibahas perancangan dan realisasi dari perangkat keras dan perangkat lunak inkubator dengan sistem pemanas induksi. Adapun diagram blok secara keseluruhan dapat dilihat pada gambar 3.1.
3.1.1 Cara Kerja Sistem
Berdasarkan diagram blok pada gambar 3.1 maka cara kerja sistem adalah sebagai berikut :
1. Dari sumber tegangan AC 1 fasa 220 volt, tegangan diturunkan kemudian disearahkan pada rangkaian power supply untuk menghasilkan output tegangan DC.
2. Mikrokontroler ATmega 8535 adalah pengendali utama sistem dan berfungsi menghasilkan gelombang kotak untuk memicu IGBT sebagai
switching arus AC sehingga tegangan tinggi dapat dibangkitkan
3. Driver IGBT berfungsi untuk menghubungkan rangkaian mikrokontroler dengan IGBT untuk mengoperasikan IGBT dari keadaan Off ke On dan sebaliknya serta sebagai pemisah (isolasi) antara mikrokontroler dengan IGBT untuk menghindari kerusakan pada mikrokontroler jika terjadi arus balik dari rangkaian IGBT.
4. IGBT berfungsi sebagai switching pada rangkaian untuk mengubah tegangan DC menjadi tegangan AC
5. Kumparan penginduksi akan dilewatkan tegangan AC sehingga
menghasilkan medan magnet yang akan menginduksi objek yang ingin dipanaskan
6. Sensor suhu digunakan untuk membaca kenaikan suhu pada sistem 7. LCD berfungsi untuk menampilkan nilai temperatur sistem.
3.1.2 Komponen Sistem
1. AVR ATMega 8535
2. IGBT CT30KM-8H digunakan pada rangkaian switching 3. Transistor 13001 digunakan pada rangkaian driverswitching 4. IC TLP 250 digunakan pada rangkaian optocoupler.
3.2 SPESIFIKASI DAN PERANCANGAN PERANGKAT KERAS
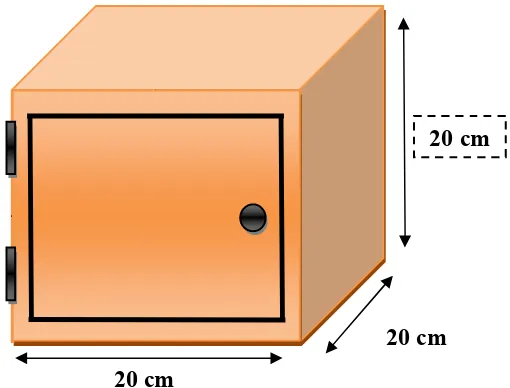
3.2.1. Perancangan Inkubator (Benda Kerja)
Benda kerja adalah objek yang akan diinduksi oleh medan magnet frekuensi tinggi dari kumparan kerja. Benda ini dibuat dari bahan steel low carbon. Pemilihan bahan ini didasarkan pada permeabilitas magnetik relatif yang dimiliki cukup besar yaitu 100 sehingga baik dalam menghantarkan garis-garis gaya magnet dan berpotensi menghasilkan panas yang cukup besar.
Steel low carbon yang digunakan memiliki ketebalan 3 mm. Bahan tersebut dibentuk menjadi kotak segiempat dengan ukuran 20 cm x 20 cm x 20 cm. Untuk menerapkan sistem kontrol temperatur didalam inkubator, maka didalamnya akan ditempatkan sensor temperatur LM35 dan diluarnya ditempatkan penampil nilai temperatur berupa LCD.
3.2.1.1. Kapasitas Inkubator (Benda Kerja)
Berdasarkan perencanaan awal, ukuran inkubator (benda kerja) adalah 20 cm x 20 cm x 20 cm sehingga diperoleh panjang = 20 cm x 6 sisi = 120 cm, lebar = 20 cm dan tebal = 3 mm. Maka volume bahan inkubator adalah :
V = P x l x t (3.1)
v = Volume inkubator yaitu 0.00072 m3
ρ = Massa jenis bahan inkubator yaitu 4000 kg/m3
maka massa inkubator adalah :
m = (4000 kg/m3). (1.2 x 0.2 x 0.003) m = 2,88 kg = 3 kg
20 cm 20 cm
Gambar 3.2. Rancangan Dimensi Inkubator
3.2.1.2. Kalor yang Dibutuhkan Inkubator (Benda Kerja)
Untuk memanaskan inkubator hingga 1000C maka artinya peneliti harus menaikkan temperatur didalam benda kerja dalam kondisi beban udara. Oleh karena itu, tahap pertama adalah menghitung massa udara didalam benda kerja. Berdasarkan persamaan dibawah ini:
m
udara= ρ.v
Dimana ;
ρ = massa jenis udara yaitu 1,29 kg/m3
v = dimensi inkubator yaitu 20 cm x 20 cm x 20 cm = 0,008 m3 maka massa udara didalam benda kerja adalah :
= (1,29 kg/m3)(0,008 m3) = 0,01032 kg
Setelah diperoleh massa udara didalam benda kerja, maka tahap berikutnya adalah menghitung energi kalor untuk menaikkan temperatur didalam benda kerja tersebut hingga 1000C. Berdasarkan persamaan dibawah ini :
Q = m udara. C udara. ∆ (3.3)
Dimana ;
m = massa udara didalam inkubator yaitu 0,01032 kg C = massa jenis udara yaitu 1000 J/Kg.K.
∆ = suhu awal udara = 200C, suhu akhir = 1000C
Maka energi kalor untuk menaikkan temperatur didalam benda kerja tersebut hingga 1000C adalah :
Q = 0,01032 kg. 1000 J/Kg.K. (373 K – 293 K)
= 825,6 J
Jadi energi yang diperlukan untuk menaikkan temperatur didalam benda kerja hingga 1000C adalah 825,6 J.
Tercapainya temperatur 100 0C didalam benda kerja disebabkan adanya peningkatan temperatur pada dinding benda kerja (inkubator) tersebut, dimana temperatur awal dinding inkubator yaitu sekitar 25 0C. Temperatur didalam benda kerja (inkubator) akan meningkat seiring dengan peningkatan temperatur pada dinding inkubator. Hal ini karena terjadi proses perpindahan panas dari dinding inkubator melalui cara konveksi (aliran).
Untuk mengetahui perpindahan kalor tersebut dapat menggunakan persamaan perpindahan kalor secara konveksi berikut:
H = h. A. (T1- T0) (Watt) (3.4a)
Q= h. A. (T1- T0). t
(Joule)
(3.4b)
Dimana :
h = nilai koefisien konveksi termal (W/ m2 K) A = luas permukaan perpindahan kalor yaitu 0,16 m2 T1 = Temperatur awal bahan inkubator (25 0C)
T0 = Temperatur awal udara (20 0C)
t = Waktu perpindahan kalor (s)
Sebelum menghitung waktu untuk menaikkan temperatur ruang inkubator, maka perlu dihitung koefisien konveksi termal dari bahan inkubator tersebut.
Maka nilai koefisien konveksi termal dari bahan inkubator adalah : H = h. A. ∆
825,6 J/s = h ( 0,16 m2) (298 K- 293 K) h = 1032 W/ m2 K
itu, energi kalor yang dibutuhkan pemanas induksi untuk menaikkan temperatur dinding inkubator menjadi 100 0C adalah :
Q
= m
benda. C
benda.
∆
Dimana ;
m = massa inkubator yaitu 3 kg
C = kalor jenis bahan inkubator yaitu 500 J/Kg.K
∆ = suhu awal inkubator = 250C, suhu akhir = 100 0C maka energi kalor yang dihasilkan adalah :
Qdinding inkub = 3 kg. 500 J/Kg.K. 75 K
= 112,5 kJ
Jadi besarnya energi maksimal yang dibutuhkan pemanas induksi untuk menaikkan temperatur dinding inkubator (benda kerja) menjadi 100 0C adalah sebesar 112,5 kJ
3.2.2. Kumparan Kerja
Kumparan kerja ini dibuat dari bahan tembaga yang baik menghantarkan arus listrik. Ada beberapa pilihan bahan yang akan digunakan, namun tembaga merupakan logam yang paling konduktif dilihat dari segi ekonomis, sehingga dipilih sebagai penghantar arus listrik frekuensi tinggi yang nantinya akan menghasilkan medan magnet yang menginduksi benda kerja.
Untuk bentuknya dipilih tembaga yang berbentuk pipa artinya bagian tengahnya berlubang karena mengingat peristiwa skin effect (efek kulit) yang membuat arus hanya akan mengalir pada permukaan tembaga. Pipa tembaga yang digunakan telah dilapaisi bahan email agar lebih aman.
Untuk lebih jelasnya, bentuk pipa tembaga dapat dilihat pada gambar 3.3 dibawah ini.
Dalam penelitian ini, lilitan kumparan pada inkubator dirancang agar menghasilkan panas yang dapat diterapkan secara homogen artinya panas menyebar secara merata pada setiap sisi inkubator. Selain itu, lilitan penginduksi ini harus mempunyai jumlah liiltan yang cukup agar medan magnetik yang dihasilkan dapat menginduksi benda kerja dengan baik.
Sebelum dililit oleh pipa tembaga, inkubator akan dilapisi oleh bahan isolator panas berupa kayu guna menghindari kontak panas antara bahan inkubator dengan pipa tembaga sehingga temperatur pipa tembaga tidak terjadi kenaikan yang signifikan.
Adapun perancangan lilitan kumparan pada inkubator yang telah dilapisi kayu dapat dilihat pada gambar 3.4 dibawah ini.
Gambar 3.4
Perancangan Lilitan Kumparan pada Inkubator yang Dilapisi Bahan Kayu
3.2.2.1. Induksi Magnetik dan Induktansi Kumparan Kerja
balik (AC) menghasilkan induksi magnet yang akan menginduksi benda kerja sehingga menghasilkan panas pada benda kerja tersebut.
Oleh karena daya yang dibutuhkan untuk menaikkan temperatur dinding benda kerja menjadi 1000C adalah 112,5 kW, maka nilai induksi magnetik dan induktansi kumparan (dalam perancangan ini berupa selenoida) yang dibutuhkan dapat dihitung dengan persamaan daya disisipasi deret fourier berikut: (Sudaryatno. 2010)
Peddy total =
( , . . π . . )
ρ.
(Watt)
(3.5)
Dimana,
f = frekuensi dalam penelitian digunakan 80 kHz B = induksi medan magnet (T)
Z = densitas material inkubator (4000 kg/m3)
ρ = Resistivitas material inkubator (9,68 .10-8 ohm.m)
Maka besar kuat medan magnet yang diperlukan untuk menghasilkan daya sebesar 112,5 kW adalah:
112,5 kW = ( , . ) ( . ) ( )
( , . . ). ( )
B = 97,50. 10-5 T
Berdasarkan nilai induksi magnet yang diperoleh, maka kita dapat menentukan arus yang diberikan sehingga berdasarkan persamaan dibawah ini:
B = µ (3.6)
maka nilai jumlah lilitan dan arus yang dibutuhkan kumparan kerja adalah:
97,50. 10-5 T = . . .
,
Sehingga besarnya arus yang mengalir pada kumparan kerja adalah 10 A. Jumlah lilitan yang dibuat sudah mampu menghasilkan induksi magnetik yang dapat menginduksi inkubator sehingga menghasilkan panas.
Untuk mengetahui luas penampang pipa tembaga yang digunakan dalam penelitian ini agar mampu membawa arus sebesar 10 A diperoleh dengan menggunakan persamaan 2.6. Sehingga luas penampang pipa tembaga yang digunakan adalah 10 mm2 dengan rugi tegangan sekitar 0,17 V.
Selanjutnya besar induktansi kumparan dapat dihitung dengan persamaan berikut:
= µ . . (3.7)
Dimana,
L = induktansi diri (H)
N = Jumlah lilitan yaitu 9 lilitan
A = Luas bidang tembus bahan yaitu 0,16 m2 = panjang selenoida yaitu 0,116 m
maka nilai L pada kumparan kerja adalah:
L =
( π . ) ( ) ( . ),
=
140,32.10-6 HJadi nilai induktansi kumparan kerja adalah 140,32.10-6 H
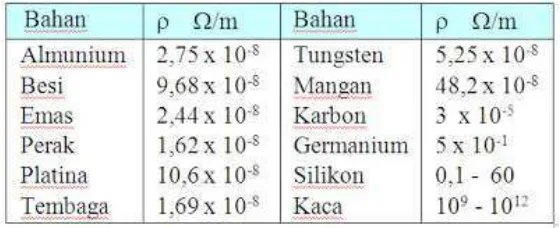
Adapun untuk menghitung luas permukaan pipa tembaga tersebut, diperlukan data tentang resistivitas kawat, panjang kawat dan hambatan kawat. Tabel 3.1 adalah nilai resistivitas beberapa jenis bahan.
Berdasarkan tabel diatas, nilai resistivitas bahan tembaga adalah 1,69. 108 ohm/m, maka luas permukaan pipa tembaga dapat dihitung dengan persamaan 3.8 dibawah ini
R = ρ (3.8)
Keterangan :
l = panjang konduktor yang dialiri arus (m) A = luas permukaan konduktor (m2)
R = Hambatan konduktor (ohm)
= (1,69. 10-8 ohm/m) A = 6,3375. 10-8 m2
Maka luas permukaan pipa tembaga adalah 6,3375. 10-8 m2
3.2.3. Rangkaian Power Supply
Rangkaian power supply berfungsi mengubah daya masukan AC menjadi daya keluaran DC. Tegangan DC didapatkan dari hasil penyearahan tegangan AC jala-jala yang sebelumnya diturunkan tegangannya menggunakan trafo stepdown.
Rangkaian power supply dalam penelitian ini dibuat dengan tegangan output yang dapat diatur dari 0 volt hingga +15 volt DC digunakan untuk menyuplai rangkaian mikrokontroler, rangkaian driver IGBT, rangkaian IGBT dan kipas. Regulator tegangan yang digunakan pada rangkaian power supply ini adalah konfigurasi dioda zener, pembagi tegangan resistor dan penguat arus transistor. Adapun rangkaian power supply tersebut dapat dilihat pada gambar 3.5 dibawah ini.
Adapun untuk menyuplai rangkaian pembangkit arus AC digunakan power supply yang memiliki kapasitas arus 10 A dan tegangan 24 V. Untuk membuat rangkaian power supply ini peneliti memanfaatkan trafo bekas. Inti trafo tersebut dilepas dengan cara merendamnya kedalam tiner selama 2 hari. Selanjutnya peneliti melepaskan kawat email dari tempat gulungan trafo. Kemudian kawat email diluruskan dan digulung kembali. Proses ini dilakukan karena pada awalnya tegangan sekunder pada trafo tidak sesuai dengan tegangan yang diperlukan pada perancangan alat.
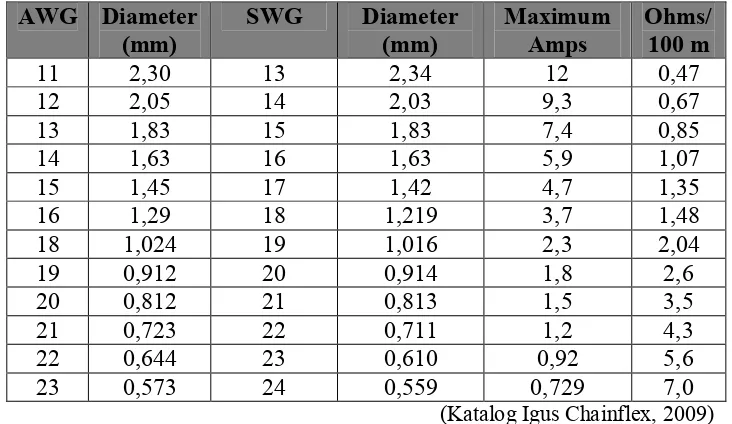
Gulungan kawat primer biasanya memiliki jumlah lilitan yang jauh lebih banyak dari jumlah lilitan sekunder. Selain itu, tebal kawat lilitan primer lebih kecil dari tebal kawat lilitan sekunder. Untuk menentukan tebal kawat bisa dilihat didaftar yang telah ditentukan. Berikut ini tabel 3.3 penentuan diameter kawat untuk gulungan primer dan sekunder
Tabel 3.2. Diameter kawat untuk gulungan primer dan sekunder
AWG Diameter dikalikan dengan tebal susunan seluruh inti besi. Sehingga luas penampang tempat gulungan pada perancangan alat ini adalah 5 cm x 5,5 cm = 27,5 cm2. Untuk menentukan jumlah lilitan dapat dipakai aturan umum yaitu :
Jumlah lilitan = 50 / luas penampang tempat gulungan (3.9)
Sehingga diperoleh jumlah lilitan sebesar :
Untuk lilitan primer tegangannya adalah 220 volt, sehingga diperlukan jumlah lilitan sebanyak 1,745 x 220 = 385 lilitan, untuk mengantisipasi kenaikan tegangan peneliti menggunakan lilitan primer sebanyak 420 lillitan. Sedangkan untuk lilitan sekunder tegangannya adalah 24 volt, maka diperlukan jumlah lilitan sebanyak 1,745 x 24 = 42 lilitan, namun untuk mengantisipasi kekurangan tegangan pada saat trafo diberi beban maksimum maka peneliti menambah lilitan menjadi 50 lilitan.
3.2.4. Rangkaian Penyearah
Penyearah adalah salah satu konverter yang berfungsi untuk mengubah tegangan bolak-balik (AC) menjadi tegangan searah (DC). Penyearah yang digunakan dalam perancangan ini adalah penyearah satu fasa tak terkontrol gelombang penuh. Penyearah jenis ini menggunakan susunan empat buah dioda.
Pada rangkaian pembangkit arus AC, dibutuhkan suplai DC yang rata dengan riak (ripple) yang sekecil mungkin. Oleh karena itu dipasang kapasitor filter. Filter kapasitor digunakan untuk menghaluskan keluaran penyearah yang mengandung riak. Adapun rangkaian penyearah ditunjukkan pada gambar 3.6 dibawah ini
Gambar 3.6 penyearah 1 fasa gelombang penuh
negatif maka D2, D4 pada posisi forward bias dan D1, D2 pada posisi reverse
bias sehingan level tegangan sisi negatif tersebut dialirkan melalui D2, D4.
Besar tegangan rata rata yang dihasilkan penyearah gelombang penuh setelah dipasang kapasitor pada perancangan ini yaitu :
VDC = Vm (3.10)
Vm= √2 VLN (3.11)
VDC = √2 VLN (3.12)
Dimana:
VDC = Tegangan DC keluaran (volt)
VLN = Tegangan maksimum masukan (volt)
sehingga :
VDC = √2 x 24
VDC = 33.94 Volt.
Maka besar tegangan DC yang dihasilkan oleh penyearah 1 fasa jembatan penuh menjadi Vdc = 33.94 volt. Selanjutnya tegangan ini kemudian diregulasi dengan regulator LM7812 menjadi 24 Vdc.
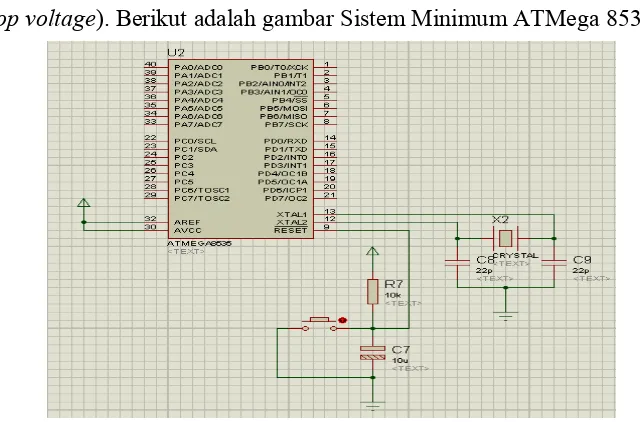
3.2.5. Rangkaian Kontrol
Rangkaian kontrol berfungsi untuk mengendalikan kerja dari rangkaian pemanas induksi. Pada perancangan ini dipilih Mikrokontroler ATMega 8535 karena memiliki kestabilan tegangan yang tinggi jika terjadi penurunan tegangan (drop voltage). Berikut adalah gambar Sistem Minimum ATMega 8535.
Fungsi mikrokontroler dalam perancangan ini adalah membangkitkan sinyal PWM untuk memicu IGBT sebagai switching arus AC. Secara teori, bentuk gelombang tegangan keluaran dari switching ini adalah sinusoidal. Namun pada prakteknya bentuk gelombang keluarannya banyak mengandung harmonisasi. Oleh karena itulah dilakukan teknik pensaklaran dengan sinyal PWM dari sumber DC tetap untuk mengatur tegangan keluarannya. Selain itu mikrokontroler ini juga berfungsi sebagai pengatur keluaran LCD.
3.2.6. Rangkaian IGBT dan Driver IGBT 3.2.6.1. Rangkaian Driver IGBT
Rangkaian driver IGBT adalah rangkaian yang menghubungkan antara rangkaian kontrol dengan gate IGBT. Fungsi utama dari rangkaian ini adalah untuk mengoperasikan IGBT dari keadaan off ke on atau sebaliknya.
Pada rangkaian driver IGBT ini diperlukan sebuah optocoupler yaitu IC yang terdiri dari dua bagian yang terpisah yaitu bagian cahaya sebagai masukan dan pendeteksi sumber cahaya sebagai keluarannya. Penggunaanya sebagai
pemisah antara mikrokontroler dengan gate IGBT untuk melindungi
mikrokontroler jika terjadi arus balik/tegangan tembus dari gate IGBT.
Optocoupler ini juga akan menguatkan keluaran mikrokontroler berupa gelombang kotak frekuensi tinggi ke gate IGBT. Rangkaian driver IGBT harus mampu secara cepat menerima dan membuang arus pada saat switching frekuensi tinggi. Rangkaian ini terdiri dari transistor NPN dan PNP. Adapun rangkaiannya dapat dilihat pada gambar 3.9.
3.2.6.2. Rangkaian IGBT
IGBT berfungsi sebagai switching pada rangkaian untuk mengubah tegangan DC menjadi tegangan AC. Pada skripsi ini akan dirancang sistem
switching kecepatan tinggi. Oleh karena itu penentuan spesifikasi IGBT sangat diperlukan. Dengan mengetahui nilai arus dan tegangan maksimal yang mampu dilalui oleh IGBT maka dapat ditentukan spesifikasi IGBT yang cocok dengan perancangan sistem.
Pada skripsi ini digunakan IGBT CT30KM-8H dengan spesifikasi berikut: 1. Collector-emitter voltage = 400 V
2. Gate emitter Voltage = 20 V 3. Peak Gate emitter Voltage = 40 A
Pemilihan IGBT dengan tipe ini karena memiliki tegangan VMaks = 400 V
dan Arus IMaks = 40 A. Spesifikasi ini sudah cocok karena IGBT sudah mampu
menahan tegangan dan arus dalam perancangan sistem. Adapun rangkaiannya dapat dilihat pada gambar 3.8 dibawah.
Gambar 3.8 Rangkaian Dasar IGBT
3.2.7. Rangkaian Kumparan Toroida
=µ . .
Dimana,
L = induktansi diri
N = Jumlah lilitan yaitu 30 lilitan A = Luas penampang yaitu 3 cm2
= panjang kumparan yaitu 5 cm
maka nilai L pada perancangan rangkaian Toroida ini adalah
= (4 . 10 )(30 ). (3 10 ) 5 10
= 678,2 10 = 67,8 µ
Maka besar induktansi diri toroid yang digunakan adalah 67,8 µH pada kuat arus maksimum 10 A. Nilai induktansi diri toroid ini sudah mampu membuat sirkuit berosilasi.
3.2.8. Rangkaian Sistem Pemanas Induksi
Rangkaian sistem pemanas induksi ini terdiri dari 3 rangkaian utama yaitu rangkaian induktor terhadap kumparan kerja, rangkaian driver pembangkit arus AC dan rangkaian pembangkit arus AC.
3.2.8.1. Rangkaian Induktor pada Kumparan Kerja
Dalam rangkaian ini, induktor (L1) berfungsi untuk menjaga osilasi frekuensi tinggi. Adanya induktor ini dapat menghindari kerusakan pada power supply. Adapun nilai induktansinya masing-masing diperoleh dari persamaan (3.14) adalah 67,8 µ dengan N = 30 lilitan, A = 3 cm2 dan = 5 cm. Nilai induktansi diri toroid ini sudah mampu membuat sirkuit berosilasi.
Kumparan kerja berfungsi untuk mengalirkan arus listrik bolak-balik di sekeliling benda kerja untuk membangkitkan arus eddy. Kumparan ini terdiri atas 9 lilitan pipa tembaga dengan luas penampang 10 mm2.
3.2.8.2. Rangkaian Pembangkit Arus AC
Pada rangkaian pembangkit arus AC terdiri 3 komponen utama yaitu IGBT, induktor dan dioda. Adapun rangkaiannya dapat dilihat pada gambar 3.11
Gambar 3.11 Rangkaian Pembangkit Arus AC
IGBT yang digunakan tipe CT30KM-8H memiliki tegangan VMaks = 400 V dan
Arus IMaks = 30 A. Induktor (L1) berfungsi menjaga osilasi frekuensi tinggi
voltage drop yaitu memiliki voltage rendah sebesar (12V) bertujuan agar gate
IGBT dapat sepenuhnya Off ketika yang lain On. Selain itu, digunakan dioda
Schottky (400 V) karena memiliki kecepatan tinggi (fast diode) dan memiliki kemampuan pemulihan keadaan yang cepat.
Nilai tahanan berfungsi sebagai penentu kecepatan IGBT menyala. Dalam rangkaian ini nilai tahanan dipasang sebesar 440 ohm sehingga kecepatan IGBT cukup tinggi.
3.2.8.3. Rangkaian Driver pada Pembangkit Arus AC
Rangkaian driver ini adalah interface antara rangkaian kontrol (mikrokontroler) sebagai PWM dengan gate IGBT pada rangkaian pembangkit arus AC. Adapun rangkaian selengkapnya dapat dilihat pada gambar 3.12 dibawah ini.
Gambar 3.12 Rangkaian Driver pada Pembangkit Arus AC
Rangkaian driver dilengkapi optocoupler untuk memisahkan
pembangkit arus AC yang merupakan perangkat tegangan tinggi serta menguatkan gelombang keluaran dari rangkaian kontrol untuk diteruskan ke gate
IGBT pada rangkaian pembangkit arus AC. Pada rangkaian driver ini untuk menggerakkan IGBT pada rangkaian pembangkit arus AC, sinyal PWM keluaran mikrokontroler dikuatkan dengan menaikkan tegangan dari 5 V menjadi 12 V.
Sebenarnya gate IGBT dapat langsung dihubungkan dengan pin output
mikrokontroler, tetapi ada kemungkinan adanya tegangan tembus dari gate
menuju pin mikrokontroler ketika induksi sangat tinggi. Oleh karena itu, rangkaian driver ini akan melindungi mikrokontroler dari kemungkinan kerusakan.
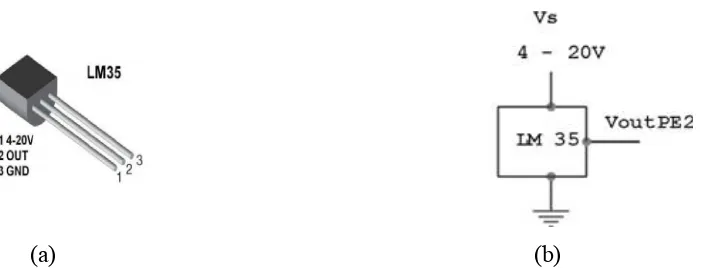
3.2.9. Rangkaian Sensor LM35
Dalam perancangan ini, digunakan sensor IC LM35 untuk mendeteksi suhu yang ada di dalam inkubator. LM35 adalah sebuah sensor suhu dengan keluaran berupa tegangan. Tegangan keluaran dari sensor LM35 sebanding dengan suhu pada permukaan sensor.
IC ini akan mengubah nilai suhu menjadi besaran tegangan. Jangkauan (range) suhu yang mampu dirasakan oleh LM35 adalah dari -55 0C sampai dengan 150 0C sehingga cocok digunakan dalam penelitian ini yaitu mendeteksi suhu sebesar 100 0C. Tegangan keluaran sensor ini akan mengalami perubahan 10 mV untuk setiap perubahan suhu 1 0C atau memenuhi persamaan berikut ini.
Vout = 10 mV x T
Dengan T adalah suhu yang dideteksi dalam derajat Celcius.
Adapun bentuk dan rangkaian sensor LM35 diperlihatkan pada gambar 3.13 dibawah ini
(a) (b)
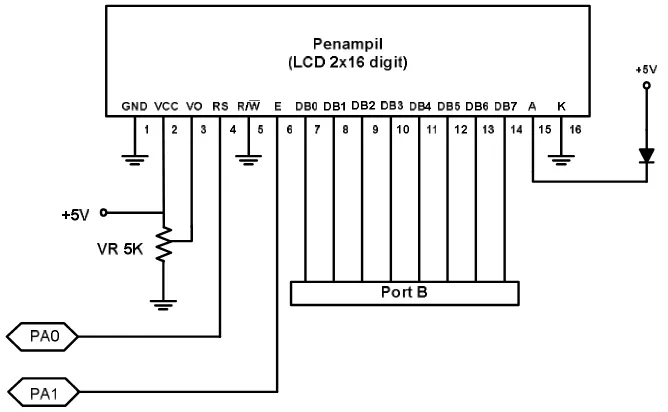
3.2.10. Rangkaian LCD
Pada perancangan ini, LCD digunakan sebagai alat penampil nilai frekuensi kerja berdasarkan masukan dari keypad dan juga penampil nilai temperatur sistem. LCD yang digunakan berjenis LCD 16× 2 seri DV-16230 data vision Taiwan. LCD ini tidak memiliki cahaya latar (backlight) akan tetapi dapat diatur kekontrasannya. Modul LCD karakter dalam sistem ini akan diakses langsung oleh mikrokontroler (Atmega8535) pemroses utama sebagai perangkat penampil nilai hasil deteksi sensor temperatur. Untuk dapat diakses oleh mikrokontroler pemroses utama, maka di dalam sistem ini dirancang rangkaian antarmuka modul LCD. Rangkaian LCD ditunjukkan oleh gambar 3.15 dibawah ini.
Gambar 3.15 Perancangan Antar muka Modul LCD
Berdasarkan gambar diatas, ada tujuh pin penting yang dihubungkan ke mikrokontroler pengatur utama yaitu RS (Register Select) ke PC0, RW (Read/Write) ke PC1, E (Enable) ke PC2, dan jalur data D4-D7 ke PC4-PC7.
Pin ke-3 dari modul LCD digunakan untuk mengatur ketajaman dari karakter yang dimunculkan oleh LCD. Dalam perancangan ini pada pin ke-3 tersebut dipasang variabel resistor dengan nilai 5 kΩ. Untuk memudahkan dalam mengatur ketajaman. Sedangkan pin ke-15 digunakan untuk mengatur back light
3.3 DIAGRAM ALIR (FLOWCHART) SISTEM PERANGKAT LUNAK 3.3.1. Diagram Alir Sistem
Gambar 3.16 Diagram Alir Sistem
3.3.2. Diagram Alir Program pada Mikrokontroler
3.3.3. Diagram Alir Pengukuran Temperatur pada Program Visual Basic
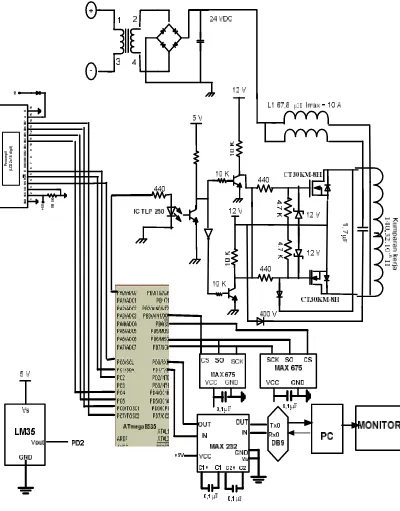
3.4. GAMBAR RANGKAIAN ALAT SECARA KESELURUHAN
BAB IV
HASIL DAN PEMBAHASAN
4.1. Pengujian Pemanas Induksi
Sistem pemanasan ini memanfaatkan panas dari prinsip induksi, yaitu dengan membangkitkan medan magnet dari kumparan kerja dan kemudian akan menginduksi benda kerja sehingga menghasilkan panas. Dalam penelitian ini, panas tersebut dimanfaatkan untuk menaikkan temperatur inkubator.
Penelitian ini menggunakan kumparan dengan dimensi 25 cm x 25 cm berbentuk segiempat mengikuti bentuk benda kerja. Adapun luas penampang pipa tembaga tersebut yaitu 10 mm2, panjang pipa tembaga( ) = 9 m dan jumlah lilitan (N) = 9 lilitan. Pipa tembaga dialiri arus sebesar 10 A dan tegangan 24 V dengan frekuensi 80 kHz. Maka besarnya nilai induksi magnetik kumparan dalam penelitian ini adalah B = 97,50. 10-5 T Selanjutnya besar induktansi kumparan diperoleh sebesar L = 140,32.10-6 H
Pada penelitian ini dilakukan pemanasan bahan inkubator yang terbuat dari steel low carbon berukuran 20cm x 20cm x 20cm dengan cara memasukkan bahan tersebut ke alat pemanas induksi untuk mengukur lama pencapaian suhu
steel low carbon sebesar 1000C. Adapun skema pengukuran temperatur ini dapat dilihat pada gambar 4.1 dibawah.
Gambar 4.1. Skema Pengukuran Temperatur
Pada gambar diatas sensor mendeteksi temperatur sistem kemudian diumpankan ke mikrokontroler untuk diproses. Mikrokontroler mengirim data melalui RS 232 sebagai antarmuka sehingga hasil pengukuran dapat dibaca di PC.
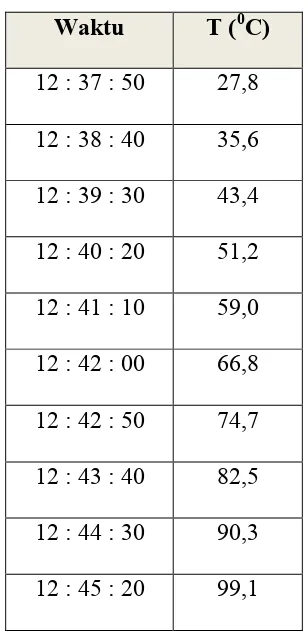
Tabel 4.1.Pengujian Pemanas Induksi.
Parameter data yaitu I = 10 A, V = 24 V, frekuensi = 80 kHz, massa bahan steel low carbon = 3 kg dan C = 500 J/Kg.K
Tabel 4.1 Pengujian Pemanas Induksi.
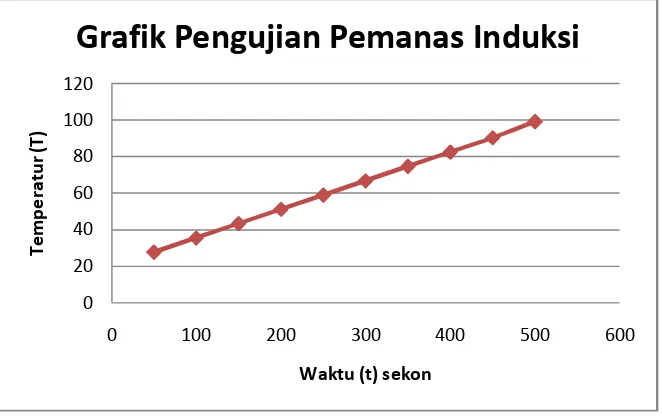
Pengujian dilakukan selama 500 detik dengan interval waktu 50 detik. Pada pengukuran 50 detik pertama hingga 300 detik, temperatur benda kerja mengalami peningkatan masing-masing sebesar 7,8 0C. Namun terjadi perbedaan peningkatan temperatur pada pengukuran 350 detik yaitu 7,90C dan kembali seperti awalnya hingga pengukuran terakhir. Jika dilakukan pemanas lebih lanjut maka temperaturnya akan melebihi 1000C.
Adapun berdasarkan perhitungan, lamanya waktu pemanasan bahan inkubator hingga mencapai suhu 1000C dapat diperoleh dengan persamaan (3.3) yaitu :
W = Q
V x I x t = m. C.∆
24 V x 10 A x t = 3 kg. 500 J/Kg.K. (373 K – 298 K)
Waktu T (0C)
12 : 37 : 50 27,8
12 : 38 : 40 35,6
12 : 39 : 30 43,4
12 : 40 : 20 51,2
12 : 41 : 10 59,0
12 : 42 : 00 66,8
12 : 42 : 50 74,7
12 : 43 : 40 82,5
12 : 44 : 30 90,3
240 t = 112500 kJ t = 468,75 s
Jadi berdasarkan perhitungan, untuk menaikkan temperatur bahan inkubator hingga 1000C maka alat pemanas induksi membutuhkan waktu selama 468,75 detik. Namun pada praktek pengujiannya, dalam waktu 500 sekon alat pemanas induksi hanya menaikkan temperatur bahan sebesar 99,10C.
Berikut dibawah ini akan diperlihatkan grafik hasil pengujian pemanas induksi pada gambar 4.2
Gambar 4.2. Grafik Analisa Pengujian Pemanas Induksi
Dari grafik diatas dapat dilihat bahwa hubungan kenaikan temperatur terhadap waktu adalah berbanding lurus. Adapun peningkatan temperatur disetiap titiknya terlihat jelas. Interval waktu pemanas yaitu 50 detik dimana pada waktu 500 detik alat pemanas induksi mampu menaikkan temperatur bahan inkubator hingga 99,10C.
Hasil perhitungan dari data pengujian pemanas induksi untuk memanaskan bahan steel low carbon dapat dihitung dengan persamaan 3.3. Dimana daya = 240 W, massa bahan steel low carbon = 3 kg, waktu = 50 sekon dengan suhu awal bahan = 200C maka diperoleh ∆ = 80C. Selanjutnya untuk waktu 100 detik diperoleh ∆ = 160C. Berikut dibawah ini penjabaran persamaannya.
12000 = 1500 ∆
induksi untuk menaikkan temperatur bahan inkubator hingga 100 0C adalah 468,75 detik
4.2. Pengujian Inkubator
Pada penelitian ini, prototype inkubator yang dibangun dipertahankan suhunya sebesar 1000C. Massa udara didalam inkubator adalah m = 0,01032 kg, maka energi kalor untuk menaikkan suhu didalam inkubator hingga 1000C adalah
Qudara = 825,6 J. Peningkatan temperatur ruang inkubator terjadi karena adanya perpindahan kalor secara konveksi dari pemanasan dinding inkubator. Pengujian temperatur inkubator ini dilakukan tanpa beban (kondisi beban udara). Berikut adalah data hasil pengujian inkubator dapat dilihat pada tabel 4.2 serta gambar 4.3 dibawah ini.
Tabel 4.2. Pengujian Inkubator
Parameter data yaitu I = 10 A, V = 24 V, frekuensi = 80 kHz, massa udara = 0,0032 kg dan Cudara = 1000 J/Kg.K
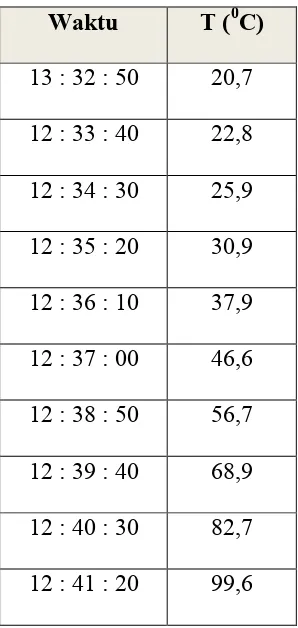
Tabel 4.2 Pengujian Inkubator
Waktu T (0C)
13 : 32 : 50 20,7
12 : 33 : 40 22,8
12 : 34 : 30 25,9
12 : 35 : 20 30,9
12 : 36 : 10 37,9
12 : 37 : 00 46,6
12 : 38 : 50 56,7
12 : 39 : 40 68,9
12 : 40 : 30 82,7
Pengujian diatas dilakukan selama 500 detik dengan interval waktu 50 detik. Setelah mencapai waktu 500 detik, temperatur inkubator meningkat menjadi 99,60C. Adapun grafik pengujian inkuabtor dapat dilihat pada gambar 4.2 berikut.
Gambar 4.3. Grafik Analisa Pengujian Inkubator
Dari grafik diatas terlihat jelas titik-titik kenaikan temperatur seiring bertambahnya waktu. Interval waktu pemanas yaitu 50 detik. Kenaikan temperatur disetiap titiknya tidak konstan namun nilainya tidak terlalu jauh berbeda antara yang satu dengan lainnya.
Hasil pengujian inkubator ini kemudian dapat dihitung menggunakan persamaan 3.8 tentang perpindahan kalor secara konveksi. Dimana massa udara didalam inkubator = 0,01032 kg, luas penampang bahan = 0,16 m2, koefisien konveksi termal bahan = 1032 W/ m2 K dan waktu pemanasan = 50 sekon maka diperoleh T = 32,9 0C.
Berikut dibawah ini adalah penjabaran persamaannya.
Jadi dari persamaan diatas, waktu yang dibutuhkan alat pemanas induksi untuk menaikkan temperatur ruang inkubator hingga 104,990C adalah 500 detik. Namun pada prakteknya, temperatur inkubator hanya 99,6 0C selama 500 detik.
4.3. Perolehan Data dari Pengujian Pemanas Induksi 4.3.1. Rugi Arus Eddy Dan Rugi Histerisis
Dari hasil perhitungan dan perolehan data pengujian pemanas induksi maka peneliti dapat menghitung rugi-rugi besi yang terdiri dari rugi histerisis dan rugi arus eddy. Dimana rugi-rugi ini sangat mempengaruhi hasil perhitungan daya yang diperoleh. Adapun perhitungannya dapat menggunakan persamaan (2.1a) dan (2.2a).
Untuk menentukan rugi daya eddy serta rugi daya histerisis maka diperlukan data-data seperti nilai frekuensi, induksi medan magnet, nilai konstanta eddy maupun konstanta histerisis. Oleh karena nilai frekuensi dan induksi medan magnet sudah diperoleh maka akan dihitung nilai masing-masing konstanta melalui penurunan persamaan (2.1a) dan (2.2a).
Untuk rugi Arus Eddy terlebih dahulu dihitung konstanta eddy bahan yaitu : Ke = I (Volume)/ E
Jadi besarnya rugi eddy yang diperoleh dalam penelitian ini adalah 1,825 Watt Sedangkan rugi histerisis pada inti besi, dapat diperoleh konstanta histerisisnya yaitu:
Kh = I. A2
Ph = Kh ƒBmaks2
= (0,256 A/m2) (80 kHz) (97,50. 10-5 T)2 = 0,0194 Watt
Jadi besarnya rugi histerisis yang diperoleh dalam penelitian ini adalah 0,0194 W
4.3.2. Efisiensi Daya Pemanas Induksi
Perhitungan rugi arus eddy dan rugi histerisis sangat penting karena dapat menjelaskan berapa besar presentasi efisiensi dari pemanas induksi dalam penelitian ini. Efisiensi ini digunakan untuk membandingkan alat sejenis jika metode pengukuran dan perhitungannya sama.
Adapun persamaan efisiensi dinyatakan sebagai berikut :
Efisiensi (n) = x 100%
=
x 100%=
, , x 100%
= 99,24 %
BAB V
KESIMPULAN DAN SARAN
5.1. KESIMPULAN
Berdasarkan perancangan dan pembuatan inkubator dengan metode induksi yang telah dilakukan ini, peneliti menarik kesimpulan antara lain :
1. Alat pemanas induksi mampu menaikkan temperatur dinding inkubator yang terbuat dari bahan steel low carbon dengan massa 3 kg hingga 99,1 0C dalam waktu 500 detik dan daya sebesar 240 Watt.
2. Alat pemanas induksi mampu menaikkan temperatur ruang inkubator hingga 99,6 0C dalam waktu 500 detik.
3. Peningkatan temperatur ruang inkubator terjadi akibat adanya perpindahan kalor secara konveksi (aliran) dari dinding inkubator saat dipanaskan.
4. Efisiensi pemanas induksi diperoleh sebesar 99,24 %
5.2. SARAN
Adapun beberapa saran/masukan yang dapat peneliti berikan guna menghasilkan inkubator dengan metode induksi yang lebih baik lagi selanjutnya antara lain :
1. Diharapkan pembuatan inkubator dengan metode induksi ini
menggunakan bahan yang lebih baik lagi dalam menghantarkan panas. 2. Diharapkan pengujian inkubator hasil pemanas induksi ini dapat diuji
dengan beberapa frekuensi kerja agar memperoleh beberapa variasi hasil. 3. Diharapkan dalam pelilitan kawat tembaga perlu diperhatikan jarak yang
BAB II
TINJAUAN PUSTAKA
2.1. Dasar Pemanas Induksi
2.1.1. Definisi Pemanas Induksi
Pemanasan induksi (Induction Heating) adalah solusi rancangan teknologi
termal yang efisien, efektif dan hemat energi berdasarkan kumparan induksi yang
menghasilkan medan elektromagnetik dari arus Eddy (arus pusar) yang arahnya
melingkar melingkupi medan magnet yang menembus objek. (Khusnul K. 2015)
Pemanasan secara induksi (induction heating) memiliki beberapa
kelebihan dibandingkan dengan sistem pemanasan yang lain yaitu penggunaan
arus induksi yang timbul pada benda kerja mengakibatkan komponennya relatif
tidak terjadi peningkatan temperatur sehingga tidak membutuhkan komponen
yang mahal. Selain itu, tidak memerlukan bahan bakar kimia, sehingga dapat
dikatakan sangat ramah lingkungan dan metode ini juga sangat efisien karena
panas yang sebenarnya dihasilkan di dalam benda kerja itu sendiri.(Alberth. 2009)
2.1.2. Prinsip Kerja Pemanas Induksi
Ada tiga faktor dasar dari pemanas induksi yaitu induksi elektromagnetik,
efek kulit dan transfer panas. Pada dasarnya, cara kerja pemanas induksi hampir
sama dengan transformator. Konsep dasar pemanas induksi terdiri dari gulungan
pemanas induktif dan arus yang menggambarkan induksi elektromagnetik serta
efek kulit.
Tujuan yang paling penting dari pemanas induksi adalah untuk
memaksimalkan pembangkitan energi panas pada gulungan sekunder. Caranya,
lubang kecil pada gulungan pemanas induktif dibuat kecil dan gulungan sekunder
dibuat dari bahan dengan hambatan listrik yang kecil dengan permeabilitas yang
tinggi. Bahan selain logam mengurangi efisiensi energi karena bahan tersebut
memiliki hambatan listrik besar dan permeabilitas yang rendah. Pemanas dengan
induksi adalah kombinasi antara elektromagnetik, perpindahan panas, dan
Pada pemanas induksi, arus listrik bolak-balik dari power unit mengalir
melalui koil yang terbuat dari tembaga. Arus ini akan menimbulkan medan
elektromagnet yang besarnya berubah-ubah. Medan ini akan membangkitkan arus
listrik pada material logam yang ada di dalamnya. Arus listrik yang timbul (arus
Eddy) menimbulkan panas yang selanjutnya dapat dimanfaatkan untuk
memanaskan dan mencairkan logam tersebut. (Wahyu. 2013)
Induction heater memanfaatkan rugi-rugi yang terjadi pada kumparan
penginduksi. Rugi-rugi yang dimanfaatkan untuk memanaskan objek antara lain
rugi arus Eddy dan rugi histerisis
2.1.2.1. Rugi Arus Eddy
Arus eddy memiliki peranan yang paling dominan dalam proses
pemanasan induksi. Panas yang dihasilkan pada material sangat bergantung
kepada besarnya arus eddy yang diinduksikan oleh lilitan penginduksi. Adapun
fenomena arus eddy pada permukaan bahan dapat dilihat pada gambar 2.1.
Gambar 2.1 Arus Eddy pada Permukaan Bahan
(Habibi, 2007)
Pada gambar diatas, ketika lilitan dialiri oleh arus bolak-balik, maka akan
timbul medan magnet di sekitar kawat penghantar. Medan magnet tersebut
besarnya berubah-ubah sesuai dengan arus yang mengalir pada lilitan tersebut.
Jika terdapat bahan konduktif disekitar medan magnet yang berubah-ubah, maka
Jadi arus eddy adalah arus pusar yang diinduksi ke bahan konduktif yang
terjadi akibat diletakkan disekitar medan magnetik yang dibangkitkan oleh kawat
penghantar yang dialiri arus bolak balik.
Adapun rugi eddy (eddy current) yaitu kerugian yang disebabkan oleh
aliran sirkulasi arus yang menginduksi bahan konduktor. Ini disebabkan oleh
aliran fluks magnetik disekitar konduktor tersebut. Eddy current dapat
menyebabkan kerugian daya karena sejumlah energi listrik akan diubah menjadi
panas. Persamaannya dirumuskan sebagai berikut: (Sudaryatno. 2010)
Pe = Ke ƒ2 Bmaks2 (2.1a)
Keterangan
Ke = konstanta Eddy
Bmaks = induksi magnet maksimum (Tesla)
f = frekuensi (Hz)
Berdasarkan persamaan diatas, untuk menghitung besarnya rugi daya eddy
diperlukan data-data seperti nilai induksi magnet maksimum (Bmaks), frekuensi
(f) dan konstanta eddy (Ke) yang bergantung pada material konduktor yang
digunakan. Untuk menentukan konstanta eddy ini akan diperoleh melalui
penurunan persamaan (2.1a) diatas yaitu:
Adapun beberapa faktor diluar kecacatan, dapat mengakibatkan respon
arus eddy. Beberapa faktor utamanya yaitu konduktivitas bahan berbanding lurus
dengan aliran arus eddy pada permukaan bahan, permeabilitas bahan
mempengaruhi seberapa mudah sebuah bahan dapat dimagnetisasi, dimana
permeabilitas bahan berbanding lurus dengan arus eddy yang dihasilkan.
meliputi ketebalan bahan dan kedalaman penetrasi yaitu ketebalan bahan yang
lebih kecil daripada kedalaman penetrasi efektif menghasilkan respon arus eddy
yang besar dan kedekatan / Lift-off dimana semakin dekat sebuah kumparan pada
permukaan, maka efek pada kumparan tersebut akan semakin baik.
2.1.2.2. Rugi Histerisis
Rugi-rugi histerisis juga memiliki peranan penting dalam pemanasan
induksi. Namun hal ini hanya berlaku pada material yang bersifat ferromagnetik
seperti besi. Untuk material diamagnetik seperti aluminium, pemanasan lebih
didominasi oleh arus eddy.
Rugi-rugi histerisis adalah kerugian yang disebabkan oleh gesekan
molekul yang melawan aliran gaya magnet di dalam konduktor. Gesekan molekul
ini akan menimbulkan panas. Panas yang timbul ini menunjukkan kerugian
energi, karena sebagian kecil energi listrik tidak dipindahkan, tetapi diubah bentuk
menjadi energi panas. Energi ini digunakan untuk mengatasi suatu hambatan dari
pergesaran intensitas fluks yang terjadi. Penggunaan energi ini akan menyebabkan
panas yang juga dimanfaatkan untuk memanaskan konduktor. Berikut gambar 2.2
memperlihatkan lingkar histerisis.
Gambar 2.2 Lingkar Histerisis
(Semiatin.1986)
Dari gambar diatas, apabila medan ( H ) diturunkan maka medan ( B )
tidak ikut menurun secara sebanding, ini akibat “gesekan“ tersebut diatas
Rugi histerisis pada inti besi, dinyatakan sebagai: (Sudaryatno. 2010)
Ph = Kh f Bmaks2 (watt) (2.2a)
Dimana,
Kh = konstanta Histerisis
Bmaks = induksi magnet maksimum (Tesla)
f = frekuensi (Hz)
Berdasarkan persamaan diatas, untuk menghitung besarnya rugi daya
histerisis diperlukan data-data seperti nilai induksi magnet maksimum (Bmaks),
frekuensi (f), dan konstanta histerisis (Kh) yang bergantung pada material
konduktor. Untuk menentukan konstanta histerisis ini juga akan diperoleh melalui
penurunan persamaan (2.2a) diatas yaitu:
Jadi untuk mempermudah menghitung konstanta histerisis pada suatu
konduktor dapat menggunakan persamaan (2.2b) diatas.
2.1.3 Elektromagnetisme
Adanya hubungan antara magnetisme dan elektromagnetisme menjelaskan
bahwa arus listrik yang mengalir di dalam konduktor menimbulkan medan magnet
di sekitar konduktor tersebut. Kuat medan magnet tergantung pada besar arus
yang mengalir pada konduktor tersebut. Dimana arus yang mengalir berbanding
lurus dengan kuat medan magnet. Untuk menentukan hubungan antara arus yang
mengalir di dalam konduktor dengan arah medan magnet, digunakan kaidah
tangan kanan (right-hand rule). Kaidah tangan kanan dapat diperagakan
ditegakkan menunjukkan arah arus. Maka arah keempat jari yang menggenggam
konduktor itu menunjukkan arah medan magnet.
2.1.4 Kerapatan fluks magnet
Kerapatan fluks magnet (magnetic flux density) adalah fluks magnet per
satuan luas pada bidang yang tegak lurus dengan fluks magnet tersebut. Kerapatan
fluks magnet sering disebut juga dengan induksi magnet (magnetic induction).
Kerapatan fluks magnet dapat dinyatakan dengan:
B = Φ (2.3)
Permeabilitas adalah kemampuan suatu bahan (misalnya logam) untuk
melakukan fluks magnet yang lebih baik di udara atau hampa udara. Sifat fisik ini
adalah penting ketika merancang sistem pemanas.
Permeabilitas magnetik relatif memiliki efek pada semua fenomena
induksi dasar. Permitivitas relatif tidak banyak digunakan pada pemanasan
induksi, tetapi memainkan peran utama dalam aplikasi pemanasan dielektrik.
Nilai konstan μo = 4 x 10-7 H/m [atau Wb / (A.m)] disebut permeabilitas ruang
bebas, dan konstanta o = 8,854 x 10-12 F/m disebut permitivitas ruang bebas.
Hasil permeabilitas magnet relatif dan permeabilitas ruang bebas disebut
permeabilitas μ dan sesuai dengan rasio kepadatan fluks magnetik (B) untuk
intensitas medan magnet (H) dirumuskan sebagai berikut :
=
µ
r.µ
o (2.4)Keterangan :
B = Kepadatan fluks magnetik
Sedangkan untuk menghitung permeabititas (µ), nilai permeabilitas relatif
(µr) harus dikalikan dengan permeabilitas udara (µo), sebagaimana rumus di bawah
µ = µ
r.µ
o (2.5)Keterangan :
µr= permeabilitas relatif
µo=permeabilitas udara
Jadi permeabilitas (μ) adalah kemampuan suatu benda untuk dilewati garis
gaya magnet. Permeabilitas dinyatakan dengan simbol µ (mu). Benda yang mudah
dilewati garis gaya magnet disebut memiliki permeabilitas tinggi. Permeabilitas
udara dan ruang hampa dianggap sama dengan satu. Untuk benda-benda yang
lain, besarnya permeabilitas ditentukan dengan perbandingan terhadap udara atau
ruang hampa, didapatkan permeabilitas relatif (relative permeability).
Ditinjau dari permeabilitas relatifnya, benda-benda dikelompokkan dalam
tiga kelompok, yaitu benda ferromagnetik memiliki permeabilitas jauh lebih besar
dari satu. Hal ini menyebabkan bila benda-benda tersebut terletak di dalam
medan magnet maka garis-garis gaya magnet cenderung lewat pada benda
tersebut. Dengan demikian benda-benda ferromagnetik mudah ditarik oleh magnet
dan mudah dibuat magnet buatan. Yang tergolong benda ini antara lain besi, baja,
nikel, kobalt, logam paduan seperti alniko dan permalloy.
Selanjutnya benda paramagnetik memiliki permeabilitas sedikit lebih
besar dari satu. Benda-benda yang tergolong pada jenis ini tidak begitu kuat
ditarik magnet dan bila terletak di dalam medan magnet, fluks yang mengalir di
dalamnya sama dengan fluks magnet yang mengalir di dalam udara biasa. Yang
tergolong benda ini antara lain aluminium, khrom, mangan dan platinum.
Dan yang terakhir, benda diamagnetik memiliki permeabilitas kurang dari
satu. Benda-benda yang tergolong jenis ini sukar ditarik magnet dan bila terletak
di dalam medan magnet cenderung dihindari oleh garis-garis gaya magnet. Yang
tergolong benda ini antara lain bismuth, antimoni, tembaga, seng, merkuri, emas
2.2. Kumparan Induksi
Lilitan penginduksi digunakan untuk menginduksi objek atau benda kerja
yang ingin dipanaskan. Lilitan penginduksi ini harus mempunyai jumlah liiltan
yang cukup agar medan magnetik yang dihasilkan dapat menginduksi benda kerja
dengan baik. Selain itu, jumlah lilitan ini perlu diperhitungkan guna mengetahui
kapasitas arus yang mampu dilewatkan. Biasanya untuk menentukannya dapat
menggunakan tabel tertentu walaupun hal ini bukan menjadi patokan mutlak.
Untuk lebih jelas dapat dilihat tabel 2.1.
Tabel 2.1 Jumlah Lilitan terhadap Kemampuan Hantar Arus
No Jumlah lilitan Kabel
Pada alat pemanas induksi selain berfungsi untuk menginduksi benda
kerja, kumparan juga digunakan sebagai induktor pada rangkaian resonan. Oleh
karenanya, jumlah lilitan diusahakan memiliki nilai induktansi yang sesuai dengan
frekuensi resonansi yang diinginkan. (AND9166/D. 2014)
Garis tengah atau tebal kawat tembaga juga menentukan kemampuan
kawat dilalui arus listrik. Bila listrik yang mengalir didalam kawat melebihi
kemampuan dari kawat maka akan mengakibatkan kawat menjadi panas dan jika
arus yang melaluinya jauh lebih besar dari kemampuan kawat, kawat akan
diameter kabel untuk perencanaan sebuah instalasi tenaga adalah dengan
menggunakan tabel yang dikeluarkan oleh pabrikan pembuat kabel tersebut.
Dalam merencana sebuah instalasi tenaga listrik, maka langkah awal
adalah mengetahui berapa tegangan listrik serta daya yang dibutuhkan adalah
dengan menentukan diameter kabel yang akan digunakan. Dibawah ini adalah
rumus dalam menentukan diameter kabel :
q = .
Untuk pemakaian yang profesional di pasar dapat dijumpai kawat tembaga
dengan standar AWG (American Wire Gauge). Standar ini tergantung dari
diameter kawat, resistansi dan sebagainya. Misalnya kawat tembaga AWG32
berdiameter kira-kira 0,3 mm, AWG22 berdiameter 0,7 mm ataupun AWG20
yang berdiameter kira-kira 0,8 mm. Biasanya yang digunakan adalah kawat
tembaga tunggal dan memiliki isolasi.
2.3. Efek Kulit dan Kedalaman Penetrasi Panas
Efek kulit adalah hal penting dalam aplikasi listrik yang menggunakan
tegangan bolak-balik (AC). Karena efek ini, sekitar 86% daya akan terkonsentrasi
di lapisan permukaan konduktor. Lapisan ini disebut reference depth. Tingkat efek kulit tergantung pada frekuensi dan sifat material (resistivitas listrik (ρ) dan permeabilitas magnetik relatif (μr)) pada konduktor. Akan muncul efek kulit
ketika diberikan frekuensi yang semakin tinggi atau ketika jari-jari benda kerja
relatif besar. Distribusi dari densitas arus sepanjang ketebalan benda kerja (radius)
secara kasar dapat dihitung dengan persamaan
Keterangan :
I = densitas arus pada jarak y dari permukaan (A/m2).
Io = densitas arus pada permukaan benda kerja (A/m2).
y = jarak dari permukaan menuju inti (m)
Adapun kedalaman penetrasi dalam meter dirumuskan sebagai berikut ini :
=
. . (2.8)
Keterangan :
= resistivitas listrik dari logam (ohm.m).
μr = permeabilitas magnetik relatif.
f = frekuensi (Hz)
= kedalaman penetrasi (m)
Jika arus searah melewati sebuah konduktor, maka arus akan terdistribusi
secara merata pada seluruh permukaan konduktor tersebut. Tetapi jika arus
bolak-balik dialirkan melalui konduktor yang sama, arus tidak tersebar secara merata.
Kerapatan arus paling besar selalu berada dipermukaan konduktor dan kerapatan
arus ini akan semakin berkurang ketika mendekati pusat konduktor. Hal ini yang
disebut (skin effect) efek kulit. (Slamet Pambudi. 2012)
Kedalaman pemanasan bisa diatur dengan memvariasikan frekuensi
inverter. Kecepatan pemanasan akan semakin tinggi dengan mengkonsentrasikan
arus pada bagian permukaan material. Untuk lebih jelasnya dapat dilihat pada
gambar 2.3.
Gambar 2.3 Pengaruh Frekuensi pada Pemanasan Induksi
(Habibi, 2007)
Pada gambar diatas, besarnya frekuensi yang diterapkan pada konduktor
karena arus Eddy mengalir di permukaan konduktor sehingga menyebabkan
energi panas hanya terpusat pada permukaan material sehingga permukaan
material lebih cepat panas dari pada pusatnya. (AND9166/D. 2014)
Adapun besarnya frekuensi perputaran pada sebuah kumparan yang terdiri
dari lilitan di suatu medan magnetik untuk membangkitkan tegangan dapat
dirumuskan menggunakan persamaan ggl induksi magnetik dibawah ini:
∈= N.A.B.ω (2.9)
2.4. Resistivitas dan Konduktivitas Listrik pada Material
Kemampuan material untuk dengan mudah menghantarkan arus listrik
ditentukan oleh konduktivitas listrik. Kebalikan dari konduktivitas adalah
resistivitas listrik. Satuan untuk resistivitas dan konduktivitas adalah ohm meter
dan mho/m. Resistivitas listrik suatu logam tertentu bervariasi dengan suhu,
komposisi kimia, struktur mikro logam, dan ukuran butir. Untuk sebagian besar
logam, resistivitas akan naik dengan kenaikan suhu. Resistivitas dari logam murni
dapat direpresentasikan sebagai fungsi linier dari suhu (kecuali ada perubahan
dalam kisi-kisi logam)
ρT = ρ0[1 + α (T – T0 )] (2.11)
keterangan :
ρ = resistivitas listrik pada suhu ruang T0
ρ (T) = resistivitas listrik pada suhu T α = koefisien suhu dari resistivitas listrik.
Hubungan resistivitas listrik (ohm-m) dengan resistivitas listrik R (ohm) dapat
R = ρ (2.12)
Keterangan :
l = panjang konduktor yang dialiri arus.
A = luas penampang konduktor di mana arus mengalir melaluinya.
Sedangkan dalam pembuatan induktor biasanya tidak diperlukan kawat
tembaga yang sangat panjang hanya puluhan sentimeter saja, sehingga efek
resistansi bahan kawat tembaga dapat diabaikan.
2.5. IGBT (Insulated Gate Bipolar Transistor)
2.5.1. Definisi
IGBT atau Transistor dwikutub gerbang-terisolasi adalah piranti
semikonduktor yang merupakan gabungan antara Transistor dan MOSFET. Biasa
berfungsi sebagai komponen saklar untuk sebuah aplikasi daya.
Arsitektur dasar dari IGBT hampir sama dengan MOSFET kecuali adanya
penambahan layer P+ pada colector diatas layer drain N+ dari MOSFET.
Peralatan ini memiliki impedansi input yang tinggi dari MOSFET, tetapi
karakteristik konduksi seperti BJT. Jika gate adalah positif dengan respect ke
emitter, sebuah N-chanel diinduksikan pada daerah P. Ini di forward-biaskan pada
base emitter junction dari P-N-P transistor, menjadikan on dan menyebabkan
modulasi konduktivitas pada daerah N-, memberikan reduksi signitifikan pada
drop over konduksi pada MOSFET itu.
IGBT terdiri dari tipe N dan tipe P, memiliki tiga kaki yang dinamakan G
(gate), C (collector) dan E (emitor). Berikut diperlihatkan gambar penampang
umum IGBT dan simbolnya.
(a) (b)
2.5.2. Karakteristik IGBT
Berdasarkan kinerjanya, IGBT memiliki beberapa karakteristik yang
membedakannya dengan jenis mosfet lain. Karakteristik yang dimilikinya ini
menjadikannya memiliki beberapa keunggulan antara lain memiliki impedansi
input yang sangat tinggi sehingga tidak membebani rangkaian pengendalinya
(atau sering disebut rangkaian driver). Output IGBT memiliki tahanan (Roff) yang
sangat besar pada saat tidak menghantar, sehingga arus bocor sangat kecil. Pada
saat menghantar, tahanan pensaklaran (Ron) sangat kecil, mengakibatkan
tegangan jatuh (voltage drop) lebih kecil daripada transistor pada umumnya
sehingga menjadikannya lebih efisien karena kerugian panas hampir tidak ada.
Memiliki kecepatan pensaklaran/frekuensi kerja yang lebih tinggi dibanding
transistor lainnya.
2.5.3. Prinsip kerja IGBT sebagai Saklar
Prinsip kerja IGBT sebagai saklar dalam rangkaian daya dapat dijelaskan
pada gambar 2.5.
Gambar 2.5 Rangkaian Inverter Sederhana
(Helly Andri, 2012)
Dari gambar diatas dapat dilihat bahwa pada saklar S1 dan S2 di A, beban
akan mendapatkan tegangan positif dan sebaliknya pada S1 dan S2 di B, beban
akan mendapatkan tegangan positif dari arah yang berlainan. Dengan demikian,
pemindahan saklar S1 dan S2 secara bergantian akan menghasilkan tegangan
bolak-balik, dengan amplitudo yang ditentukan oleh besarnya sumber sedangkan
frekuensi ditentukan oleh perpindahan saklar. Bentuk gelombang tegangan
keluaran dari perpindahan saklar ini adalah sinusoidal. Namun pada prakteknya
dilakukan teknik pensaklaran dengan sinyal PWM dari sumber DC tetap. Pada
PWM, amplitudo tegangan keluaran dapat dikendalikan dengan memodulasi
bentuk gelombang. Mengurangi filter untuk menurunkan harmonik dan kendali
amplitudo tegangan merupakan dua keuntungan yang berbeda dari PWM. Kendali
saklar-saklar untuk keluaran sinusoidal PWM membutuhkan sinyal referensi,
dalam hal ini sinyal sinusoidal dan sinyal carrier yaitu gelombang segitiga yang
mengendalikan frekuensi switching.
2.6. PWM (Pulse Width Modulation)
Pulse-Width Modulation (PWM) adalah sebuah cara memanipulasi lebar
sinyal yang dinyatakan dengan pulsa dalam satu periode untuk mendapatkan
tegangan rata-rata yang berbeda. PWM merupakan salah satu cara untuk
mengendalikan rangkaian analog menggunakan sinyal digital. Sinyal PWM terdiri
atas deretan pulsa yang berulang dengan frekuensi tertentu. Perbandingan antara
lebar pulsa ‘ON’ dengan periode disebut dengan duty cycle. Duty cycle biasanya
diekspresikan dalam persen, dengan 100% berarti sinyal PWM selalu dalam
kondisi ‘ON’. Berikut gambar 2.6 adalah langkah-langkah pembangkitan sinyal
PWM pada mikrokontroler.
Dari skema diatas, tahap pertama adalah menggunakan fitur timer, terlebih
dahulu timer harus dihubungkan dengan clock pada mikrokontroler. Besar clock
akan menentukan frekuensi sinyal PWM yang dihasilkan. Langkah selanjutnya
adalah menghubungkan output timer dengan pin I/O yang sesuai. Berikutnya
adalah mengatur counter pada timer agar berhitung ke arah membesar. Dengan
konfigurasi demikian, counter akan berhitung mulai dari 0 hingga nilai
maksimum kemudian kembali ke 0 dan seterusnya. Langkah selanjutnya adalah
mengatur waktu on timer (periode) untuk memperoleh frekuensi PWM yang
diinginkan. Waktu on timer ini menentukan nilai maksimum counter sehingga
secara otomatis juga mempengaruhi frekuensi sinyal PWM yang dihasilkan.
Setelah itu, atur nilai register output compare untuk memperoleh duty
cycle yang diinginkan. Untuk konfigurasi timer “clear on compare match”, sinyal
PWM yang dihasilkan akan bernilai high hingga counter mencapai nilai register
output compare. Saat hal ini terjadi, sinyal PWM yang dihasilkan akan bernilai
low hingga counter mencapai nilai maksimum. Kemudian counter akan kembali
ke 0 dan sinyal PWM kembali ke nilai high. Untuk konfigurasi timer “set on
compare match”, sinyal PWM yang dihasilkan berkebalikan dengan konfigurasi
sebelumnya. Adapun dalam penelitian ini sinyal PWM dibangkitkan oleh
mikrokontroler Atmega8535 sehingga dapat memanfaatkan langkah-langkah pada
skema 2.6 diatas. (Kurnia, N. 2015)
2.6.1. Perhitungan Duty Cycle PWM
Dengan cara mengatur lebar pulsa “on” dan “off” dalam satu perioda
gelombang melalui pemberian besar sinyal referensi output dari suatu PWM akan
didapat duty cycle yang diinginkan.
Adapun duty cycle dari PWM dapat dinyatakan sebagai berikut:
Duty cycle =
x 100% (2.13)
Keterangan
Ton = Periode pada saat ON
Toff = Periode pada saat OFF
Dengan menggunakan persamaan (2.13) maka duty cycle dapat divariasikan
BAB I
PENDAHULUAN
1.1. Latar Belakang
Inkubator adalah alat yang berfungsi untuk menginkubasi dalam suhu
terkontrol. Pada umumnya, inkubator bekerja menggunakan elemen pemanas
terbuat dari plat yang didalamnya diberi nikelin atau heater keramik, dimana
pemakaian daya listriknya yang besar apalagi saat pertama dipanaskan
membutuhkan waktu yang cukup lama hingga alat dapat dioperasikan. Selain itu,
perlu dipertimbangkan pula keseragaman suhu yang ada didalam dengan
memperhatikan pola penempatan elemen pemanas.
Dalam pengoperasian inkubator diperlukan kewaspadaan yang cukup
tinggi. Hal ini dikarenakan beberapa bagian dari inkubator jika dipanaskan akan
berada pada suhu yang cukup tinggi. Jika pengguna menyentuh salah satu bagian
yang dilarang selama operasi, atau mengoperasikannya dengan cara yang salah,
bisa dipastikan pengguna akan mengalami kecelakaan yang tak diduga.
Penggunaan inkubator yang perlu dikalibrasi sebelum digunakan kembali juga
masih menjadi masalah keteledoran pengguna.
Dalam hal ini, penerapan metode pemanasan secara induksi memiliki
peluang yang cukup menjanjikan. Metode induksi memiliki kelebihan dari sisi
kesederhanaannya. Memiliki tingkat suplai panas yang terkendali dan waktu
pemanasan yang cepat. Sebelumnya, telah dilakukan penelitian tentang aplikasi
pemanas induksi untuk proses brazing pada logam (Beni, 2016).
Metode pemanas induksi ini juga sangat efisien karena panas yang
sebenarnya dihasilkan di dalam benda kerja itu sendiri. Penggunaan arus induksi
yang timbul pada benda kerja membuat komponennya relatif tidak terjadi
peningkatan temperatur, sehingga tidak membutuhkan komponen yang mahal dan
menjadikannya lebih aman. Konsumsi daya listrik masih dikategorikan kecil
dibanding penggunaan heater pada umumnya. Adapun cara pemanasan dengan
Berdasarkan alasan diatas, maka akan dilakukan penelitian dengan judul
“Rancang Bangun Inkubator Skala Laboratorium dengan Sistem Pemanas
Induksi (Induction Heating) Berbasis Mikrokontroler ATMega8535”
sehingga diharapkan mampu meminimalisir tingkat kecelakaan/kesalahan
penggunaan inkubator dan menjadikan inkubator metode induksi ini sebagai
solusi meningkatkan kinerja operasi inkubator secara efisien, mudah dan aman.
1.2. Perumusan Masalah
Berdasarkan uraian latar belakang masalah di atas, perumusan masalah
dalam penelitian ini adalah bagaimana merancang dan membuat suatu inkubator
dengan memanfaatkan panas dari prinsip induksi sehingga menghasilkan
inkubator yang mampu bekerja secara efisien, mudah dan aman.
.
1.3. Batasan Masalah Penelitian
Pada penelitian ini permasalahan yang dibahas dibatasi oleh :
1. Perancangan dan pembuatan inkubator dengan memanfaatkan panas dari
prinsip induksi.
2. Inkubator dibuat dari bahan besi dengan kandungan karbon rendah (steel
low carbon) yang diinduksi dan diuji dengan nilai frekuensi kerja
3. Penghubung pengukuran temperatur dengan komputer menggunakan port
serial dan aplikasi Visual Basic.
1.4. Tujuan Penelitian
Penelitian yang dilakukan ini bertujuan untuk menghasilkan rancang
bangun inkubator dengan memanfaatkan panas dari prinsip induksi.
1.5. Manfaat penelitian
Adapun manfaat yang diharapkan dari penelitian ini antara lain :
1. Dapat meminimalisir tingkat kecelakaan/kesalahan dalam penggunaan
inkubator.
2. Menjadikan inkubator dengan metode induksi ini sebagai solusi
1.6. Sistematika Penulisan
Penulisan laporan skripsi ini dibagi kedalam lima bab yang akan
menjelaskan secara bertahap mengenai keseluruhan isi skripsi. Adapun
sistematika penulisan skripsi ini sebagai berikut:
BAB I : PENDAHULUAN
Bab ini merupakan pendahuluan yang berisi latar belakang,
rumusan masalah, batasan masalah, tujuan penelitian, manfaat
penelitian dan sistematika penulisan.
BAB II : TINJAUAN PUSTAKA
Bab ini membahas dasar teori yang terkait dengan cara kerja
rangkaian pemanas induksi dan persamaan-persamaan empiris
yang mendukungnya.
BAB III : METODE PENELITIAN
Bab ini membahas mengenai metodologi perancangan,
pembuatan dan pengujian alat.
BAB IV : HASIL DAN ANALISIS
Bab ini berisikan hasil pengujian dan pembahasannya.
BAB V : KESIMPULAN DAN SARAN
Bab ini berisikan beberapa kesimpulan dan saran dari hasil