Informasi Dokumen
- Penulis:
- Nuril Ilmi Tohir
- Sekolah: Universitas Lampung
- Mata Pelajaran: Teknik Elektro
- Topik: Rancang Bangun Catu Daya Digital Menggunakan Buck Converter Berbasis Mikrokontroler Arduino
- Tipe: Skripsi
- Tahun: 2016
- Kota: Bandar Lampung
Ringkasan Dokumen
I. Pendahuluan: Relevansi Rancang Bangun Catu Daya Digital dengan Tujuan Pendidikan
Skripsi ini, "Rancang Bangun Catu Daya Digital Menggunakan Buck Converter Berbasis Mikrokontroler Arduino", memiliki relevansi tinggi dengan tujuan pendidikan tinggi di bidang teknik elektro, khususnya dalam konteks pembelajaran elektronika daya dan sistem kendali. Penelitian ini memadukan teori dan praktik, memungkinkan mahasiswa untuk memahami prinsip kerja catu daya, perancangan rangkaian elektronika, pemrograman mikrokontroler, dan analisis sistem kendali. Hasil penelitian yang berupa prototipe catu daya digital fungsional menjadi bukti nyata dari pemahaman konsep-konsep tersebut. Proses ini mendorong kemampuan pemecahan masalah, desain engineering, serta kemampuan analisis dan interpretasi data.
1.1 Tujuan Pembelajaran yang Tercakup
Skripsi ini secara langsung mendukung pencapaian beberapa tujuan pembelajaran, antara lain: menguasai konsep dasar elektronika daya, termasuk prinsip kerja konverter DC-DC seperti buck converter; memahami prinsip kerja mikrokontroler Arduino dan aplikasinya dalam sistem kendali; mampu merancang dan membangun rangkaian elektronika berdasarkan spesifikasi yang diberikan; mampu melakukan simulasi dan pengujian rangkaian elektronika menggunakan software pendukung seperti MATLAB Simulink; dan mampu menganalisis data hasil pengujian serta menarik kesimpulan yang valid. Mahasiswa juga dilibatkan dalam proses dokumentasi ilmiah yang sistematis, meningkatkan kemampuan penulisan laporan ilmiah.
1.2 Capaian Pembelajaran (Learning Outcomes)
Setelah mempelajari skripsi ini dan proses penelitiannya, mahasiswa diharapkan mampu: merancang dan membangun catu daya digital yang efisien dan stabil menggunakan buck converter; menganalisis kinerja catu daya digital berdasarkan parameter-parameter seperti efisiensi, regulasi beban, dan ripple tegangan; mengintegrasikan mikrokontroler Arduino dalam sistem kendali catu daya; melakukan simulasi dan validasi desain menggunakan software simulasi; mengevaluasi hasil pengujian dan membandingkannya dengan hasil simulasi; dan menyusun laporan penelitian secara sistematis dan ilmiah yang mencakup perancangan, implementasi, dan analisis hasil penelitian. Kemampuan ini relevan dengan kebutuhan industri dan riset di bidang elektronika daya.
II. Tinjauan Pustaka: Landasan Teori dan Prinsip
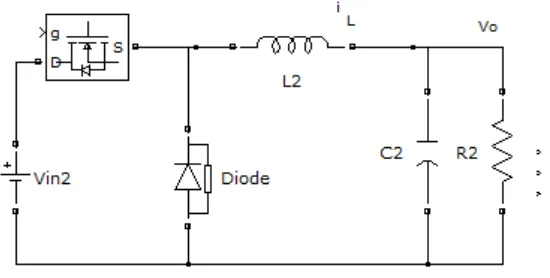
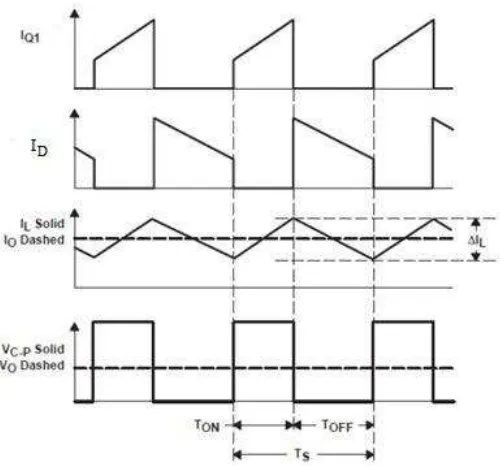
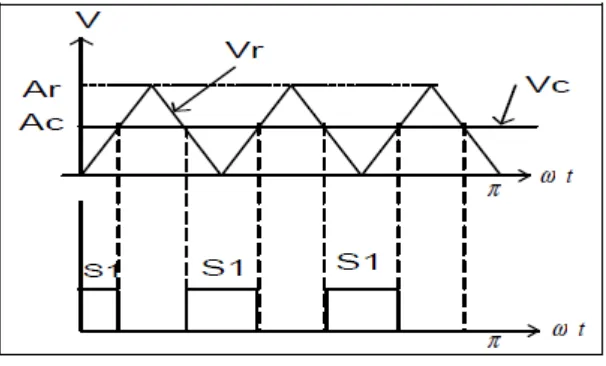
Bab tinjauan pustaka memberikan landasan teori yang kuat bagi penelitian. Konsep-konsep penting seperti catu daya (termasuk regulasi linier dan switching), buck converter, mikrokontroler Arduino, dan teknik modulasi lebar pulsa (PWM) dijelaskan secara detail. Pemahaman mendalam tentang prinsip kerja buck converter, termasuk analisis state ON dan OFF, perhitungan nilai komponen filter LC, serta penggunaan PWM untuk kendali switching sangat krusial. Selain itu, teori sistem kendali, khususnya kontrol PI, juga menjadi dasar dalam perancangan sistem kendali tegangan keluaran.
2.1 Nilai Akademik Tinjauan Pustaka
Tinjauan pustaka memiliki nilai akademik yang tinggi karena menyajikan landasan teori yang komprehensif dan relevan. Penggunaan sumber referensi yang beragam memperkaya pemahaman mahasiswa terhadap berbagai aspek penelitian. Penjelasan rinci tentang prinsip kerja setiap komponen dan subsistem membantu mahasiswa memahami interaksi antara teori dan praktik. Pemahaman ini penting untuk mengembangkan inovasi dan solusi di bidang elektronika daya.
2.2 Aplikasinya dalam Pembelajaran
Tinjauan pustaka ini dapat digunakan sebagai bahan ajar yang komprehensif dalam mata kuliah elektronika daya, sistem kendali, dan mikrokontroler. Penjelasan yang sistematis dan terstruktur memudahkan mahasiswa untuk memahami konsep-konsep yang kompleks. Selain itu, referensi yang diberikan dapat menjadi panduan bagi mahasiswa untuk melakukan studi lebih lanjut atau meneliti topik-topik terkait. Bagian ini dapat diintegrasikan dengan praktikum untuk memperkuat pemahaman konseptual.
III. Metodologi Penelitian: Proses dan Metode Penelitian
Bab metodologi penelitian menjelaskan secara rinci tahapan-tahapan yang dilakukan dalam penelitian, mulai dari perancangan model simulasi hingga pengujian perangkat keras. Penggunaan MATLAB Simulink untuk simulasi dan pengujian memungkinkan mahasiswa untuk memvalidasi desain sebelum implementasi fisik. Proses ini penting untuk mengurangi risiko kegagalan dan mengoptimalkan desain. Pengujian perangkat keras meliputi pengukuran parameter kinerja catu daya digital, seperti efisiensi, regulasi beban, dan ripple tegangan.
3.1 Nilai Pedagogis Metodologi Penelitian
Metodologi penelitian yang diuraikan dalam skripsi ini memberikan contoh yang baik tentang bagaimana proses penelitian ilmiah yang sistematis dan terstruktur dilakukan. Penggunaan simulasi sebelum implementasi fisik merupakan praktik yang baik dalam pengembangan produk. Proses ini mengajarkan mahasiswa pentingnya validasi desain dan pengujian sebelum implementasi. Pengukuran parameter kinerja dan analisis data juga merupakan bagian penting dalam metodologi ilmiah.
3.2 Implikasinya dalam Pembelajaran
Bab ini dapat dijadikan contoh bagi mahasiswa dalam melakukan penelitian di bidang teknik elektro. Penjelasan yang detail tentang tahapan-tahapan penelitian, termasuk perencanaan, pelaksanaan, dan analisis data, dapat menjadi panduan yang berharga. Penggunaan MATLAB Simulink sebagai alat simulasi dapat diintegrasikan ke dalam mata kuliah terkait untuk melatih mahasiswa menggunakan software tersebut. Analisis data dan penulisan laporan ilmiah juga dapat dijadikan sebagai bahan pembelajaran.
IV. Hasil dan Pembahasan: Analisis Data dan Interpretasi
Bab hasil dan pembahasan menyajikan data hasil simulasi dan pengujian perangkat keras. Data tersebut dianalisis untuk mengevaluasi kinerja catu daya digital dan membandingkan hasil simulasi dengan hasil pengujian fisik. Perbandingan ini penting untuk memvalidasi model simulasi dan mengidentifikasi potensi penyimpangan. Pembahasan mencakup analisis efisiensi, regulasi beban, pengaruh perubahan beban dan setpoint terhadap tegangan keluaran, serta perbandingan dengan catu daya konvensional.
4.1 Nilai Akademik Hasil dan Pembahasan
Analisis data dan interpretasi hasil merupakan bagian penting dari sebuah penelitian ilmiah. Skripsi ini menunjukkan contoh yang baik tentang bagaimana data hasil simulasi dan pengujian diinterpretasi secara kritis dan sistematis. Perbandingan hasil simulasi dengan hasil pengujian fisik memberikan gambaran yang lebih lengkap tentang kinerja catu daya digital. Pembahasan yang mendalam memperkuat argumentasi dan kesimpulan.
4.2 Penggunaan dalam Pembelajaran
Bab ini dapat digunakan sebagai contoh analisis data dan interpretasi hasil dalam konteks penelitian teknik elektro. Mahasiswa dapat belajar bagaimana menyajikan data secara efektif, menganalisis data secara kritis, dan menarik kesimpulan yang valid. Pembahasan juga dapat digunakan sebagai bahan diskusi dalam kelas untuk meningkatkan pemahaman mahasiswa terhadap konsep-konsep yang dibahas. Analisis dan pembahasan ini mengajarkan pentingnya analisis kritis dan interpretasi data dalam penelitian ilmiah.
V. Kesimpulan dan Saran: Kesimpulan Penelitian dan Arah Pengembangan
Bab kesimpulan dan saran merangkum temuan-temuan penting dari penelitian dan memberikan saran untuk pengembangan penelitian selanjutnya. Kesimpulan harus mencerminkan hasil analisis data dan menjawab rumusan masalah. Saran dapat berupa peningkatan desain catu daya digital, pengembangan algoritma kendali yang lebih canggih, atau penelitian lebih lanjut terhadap aspek-aspek tertentu dari catu daya digital.
5.1 Nilai Akademik Kesimpulan dan Saran
Kesimpulan yang dibuat harus singkat, padat, dan jelas, menunjukkan pemahaman yang mendalam terhadap hasil penelitian. Saran untuk pengembangan penelitian selanjutnya menunjukkan pemikiran yang kritis dan visioner, membuka peluang bagi penelitian lebih lanjut di bidang yang sama. Hal ini penting untuk kemajuan ilmu pengetahuan dan teknologi.
5.2 Penggunaan dalam Pembelajaran
Bab ini dapat digunakan sebagai contoh bagaimana menyusun kesimpulan dan saran dalam sebuah laporan ilmiah. Mahasiswa dapat belajar bagaimana merangkum temuan-temuan penting dan memberikan saran yang konstruktif untuk penelitian selanjutnya. Saran yang diberikan dapat menjadi inspirasi bagi mahasiswa untuk melakukan penelitian lebih lanjut di bidang elektronika daya dan sistem kendali.
Referensi Dokumen
- Catu Daya Tegangan DC Variabel dengan Dua TAHAP Regulasi (Switching dan Linier) ( Istataqomawan, Zuli, Darjat, Agung Warsito )
- Catu Daya Menggunakan Seven Segment ( Hendrickson )
- Perancangan Catu Daya Berbasis Up-Down Binary Counter dengan 32 Keluaran ( Yanis, Rifaldi, Dringhuzen J. Mamahit, S.T. M.Eng, dkk )
- Analisa Kestabilan DC-DC Konverter Dengan Metode Penambahan LC Disisi kontrol ( Andrianto.D )
- Multilevel Dc-Dc Converter Dengan Kendali Pwm Phase Shifted Carrier ( Purnomo.R.S )
- Perancangan Catu Daya Dc Terkontrol Untuk Rangkaian Resonansi Berbasis Kumparan Tesla ( Pujiyatmoko, Heru. Mochammad Facta. Agung Warsito )
- Pembuatan Catu Daya Arus Dc Menggunakan Topologi Inverter Jembatan Penuh Dan Penyearah ( Ilmanda, Hermawan . Mochammad Facta. Karnoto )

![Gambar 2.1 Rangkaian Regulator Linier[1]](https://thumb-ap.123doks.com/thumbv2/123dok/672379.173930/33.595.220.464.399.547/gambar-rangkaian-regulator-linier.webp)