PERANCANGAN ALAT BALANCING SYSTEM
PADA RODA BAN SEPEDA MOTOR BERBASIS
MIKROKONTROLER
TUGAS AKHIR
Disusun untuk memenuhi syarat kelulusan
pada Program Studi Diploma Tiga di Jurusan Teknik Komputer
Disusun Oleh :
Arif Darmansyah
(10804061)
Pembimbing :
Ir.Syahrul, M.T.
JURUSAN TEKNIK KOMPUTER
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
LEMBAR PENGESAHAN
PERANCANGAN ALAT BALANCING SYSTEM
PADA RODA BAN SEPEDA MOTOR BERBASIS
MIKROKONTROLER
Disusun untuk memenuhi syarat kelulusan
pada Program Studi Diploma Tiga di Jurusan Teknik Komputer
Disusun Oleh : Arif Darmansyah
(10804061)
Telah Disetujui dan Disahkan Sebagai Laporan Tugas Akhir Bandung, 18 Agustus 2010
Mengetahui Menyetujui
Wendi Zarman, M.Si Ir. Syahrul, M.T
i
KATA PENGANTAR
Assalamu’alaikum Wr.Wb
Puji Syukur Penulis Panjatkan Kehadirat Allah Swt Yang telah memberikan rahmat dan hidayah-nya sehingga dapat menyelesaikan tugas akhir dengan judul “PERANCANGAN ALAT BALANCING SYSTEM PADA RODA BAN SEPEDA MOTOR BERBASIS MIKROKONTROLER“ yang merupakan salah satu syarat meraih gelar Diploma Tiga Jurusan Teknik Komputer Fakultas Teknik dan Ilmu Komputer Universitas Komputer Indonesia
Pada kesempatan ini, penulis ingin menyampaikan penghargaan dan ucapan terima kasih yang tiada terhingga kepada Ibu dan Bapak tercinta, yang selalu memberikan doa dan motivasi, untuk menyelesaikan tugas akhir ini. Kepada Istriku, terima kasih atas motivasi-nya yang terus menerus memberikan dorongan moril agar penulis bisa menyelesaikan tugas akhir ini.dan tak lupa kepada Teman-teman di Jurusan 04 TK 03 khususnya.
Atas segala bantuan didikan,bimbingan,saran,kritik,dorongan yang telah diberikan, Penyusun mengucapkan terima kasih kepada :
1. Bapak Wendi Zarman, M.Si selaku Ketua Jurusan Teknik Komputer
2. Bapak John Adler, M.Si selaku Dosen Wali atas segala dukungan baik akademik maupun non akademik
3. Bapak Ir. Syahrul, M.T selaku Dosen Pembimbing atas Bimbingan,saran dan arahannya dalam menyelesaikan Tugas Akhir ini
4. Al-Ust. Dede Tasmara selaku guru ngaji di pengajian malam kamis yang selalu memberikan doa,Tausiyah.
5. Ikhwan-ikhwan di Pengajian ahad Viaduct dan Pengajian ahad Pindad 6. Bang Budi,Madum,Mujahidin di ADIRA MOTOR
7. Teja,Apip,Dede yang selalu direpotkan oleh penulis
8. Semua rekan-rekan di Jurusan Tekkom kelas 04 TK 03 yang selalu memberikan terus dorongan
menyadari dengan segala kekurangan yang penulis miliki, laporan ini masih jauh dari sempurna. Untuk itu penulis masih membutuhkan kritik dan saran dari pembaca. Semoga Allah Swt selalu memberikan bimbingan kepada penulis. Amiin
Wassalamu’alaikum Wr. Wb
Bandung, Juli 2010
iii
1.3 Pembatasan Masalah ... 2
1.4 Metodologi Penulisan ... 2
1.5 Sistematika Penulisan ... 2
BAB II DASAR TEORI ... 4
2. 1 Optocoupler ... 4
2.2 Mikrokontroller AT89S51 ... 4
2.2.1 Fungsi Pin Mikrokontroler AT89S51...6
2.2.2 Organisasi Memori...8
2.2.3 Program Memory ...9
2.2.4 Memory Data...10
2.2.5 Special Function Register...11
2.2.6 Sumber Interupsi MCS51...14
2.3 Catudaya ... 16
2.3.1 Penyearah Gelombang Penuh Sistem CT...16
2.4 LM 7805...16
2.5 Resistor...17
2.6 Kapasitor... 17
2.7 Dioda ... 18
2.8 Transistor... 18
2.9 Bahasa Pemrograman ... 19
BAB III PERANCANGAN SISTEM ... 22
3.1 Perancangan Perangkat Keras ... 22
3.1.1 Blok Diagram Sistem ... 22
3.1.2 Rangkaian Sensor...23
3.1.3 Rangkaian Mikrokontroler... 23
3.1.4 Rangkaian ADC ... 25
3.1.5 Rangkaian Sevensegment... 28
3.1.6 Rangkaian Led Indikator ... 29
3.1.7 Power Supply ... 30
3.2 Perancangan Perangkat Lunak ... 31
3.2.1 Flowchart Keseluruhan Tentang Cara Kerja Alat ... 31
3.2.2 Flowchart Program Tampilan Pada Mikrokontroler ... 32
BAB IV PENGUJIAN DAN ANALISA ... 33
4.1 Pengujian Perangkat Keras (Hardware) ... 33
4.1.1 Pengujian Catudaya...33
4.1.2 Pengujian Sensor Optocoupler...34
4.1.3 Pengujian Rangkaian Sevensegment... 36
4.2 Pengujian Perangkat Lunak... 37
4.2.1 Pengujian Program ... 37
BAB V KESIMPULAN DAN SARAN... 42
v
DAFTAR GAMBAR
Gambar 2.1 Optocoupler ... 4
Gambar 2.2 Konfigurasi Pin Mikrokontroler AT89S51... 6
Gambar 2.3 Diagram Blok Mikrokontroller 8051 ...9
Gambar 2.4 Arsitektur Memori Mikrokontroller 8051...9
Gambar 2.5 Peta Interupsi Mikrokontroller 8051 ... 10
Gambar 2.6 Memori Data Internal... 11
Gambar 2.7 RAM internal 128 byte paling bawah... 11
Gambar 2.8 Peta SFR ... 12
Gambar 2.9 (a) RegisterTCON, (b) TMOD... 15
Gambar 2.10 Gelombang Penuh Sistem CT ... 16
Gambar 2.11 IC LM7805... 17
Gambar 2.12 Resistor ...17
Gambar 2.13 Electrolytic Capasitor (elco) ... 18
Gambar 2.14 Simbol Dioda... 18
Gambar 2.15 Rangkaian Skema Dasar Konfigurasi Saklar menggunakan Trasistor.. 19
Gambar 3.1 Blok Diagram Sistem ... 22
Gambar 3.2 Sensor Optocoupler ... 23
Gambar 3.3 Skema Rangkaian Mikrokontroler AT89S51 ... 24
Gambar 3.4 Konfigurasi Pin ADC 0804 ... 25
Gambar 3.5 Schematic ADC 0804 ... 25
Gambar 3.6 Diagram Alir Proses ADC ... 28
Gambar 3.7 Rangkaian Sevensegment ... 28
Gambar 3.8 Rangkaian Dekoder IC 74LS138 ... 29
Gambar 3.9 Rangkaian Led Indikator... 29
Gambar 3.10 Rangkaian Power Supply ... 30
Gambar 3.11 Flowchart Keseluruhan Cara Kerja Alat... 31
Gambar 3.12 Flowchart ProgramTampilan Pada sevensegment ... 32
Gambar 4.1 Sensor Optocoupler ... 34
Gambar 4.2 Posisi sensor pada kondisi baik ... 34
Gambar 4.3 Posisi sensor pada kondisi kurang baik ... 35
Gambar 4.4 Posisi sensor pada kondisi buruk ... 35
Gambar 4.6 Posisi ban pada kemiringan 890... 37
Gambar 4.7 Posisi ban pada kemiringan 900... 38
Gambar 4.8 Posisi ban pada kemiringan 910... 38
Gambar 4.9 Posisi ban pada kemiringan 870... 38
Gambar 4.10 Posisi ban pada kemiringan 880... 39
Gambar 4.11 Posisi ban pada kemiringan 920... 39
Gambar 4.12 Posisi ban pada kemiringan 930... 39
Gambar 4.13 Posisi ban pada kemiringan 840... 40
Gambar 4.14 Posisi ban pada kemiringan 850... 40
Gambar 4.15 Posisi ban pada kemiringan 940... 40
vii
DAFTAR TABEL
Tabel 2.1 Fungsi khusus dari Port 1...7
Tabel 2.2 Fungsi khusus dari Port 3...7
Tabel 2.3 Program status word ...14
Tabel 2.4 Alamat rekening bank...14
Tabel 2.5 Register TCON dan TMOD ...15
Tabel 2.6 Mode Timer ...16
Tabel 3.1 Pin-pin AT89S51 yang digunakan pada mikrokontroler ... 24
Tabel 3.2 Tabel resolusi ... 26
Tabel 3.3 Koneksi interface ADC ke Mikrokontroler ... 27
Tabel 3.4 Instruksi logika pada pin kontrol A/D 0804... 27 Tabel 3.5 Kebenaran 74LS138...29
Tabel 3.6 Led Indikator Posisi Benda...29
Tabel 4.1 Pengukuran Catudaya...33
BAB I
PENDAHULUAN
1.1.Latar Belakang
Perkembangan teknologi dewasa ini semakin pesat, ini terbukti dengan adanya berbagai terobosan-terobosan teknologi yang semakin hari semakin canggih, baik itu pengembangan dari teknologi yang pernah ada, ataupun suatu terobosan teknologi baru. Seperti halnya mikrokontroler yang merupakan suatu terobosan teknologi microprocessor dan microcomputer, hadir untuk memanjakan para penghobi teknologi microprocessor. Sampai saat ini, sistem mikrokontroler sudah banyak dirasakan atau digunakan oleh berbagai kalangan masyarakat, dari orang tua sampai dengan anak-anak. Di kalangan mahasiswa misalnya, mikrokontroler banyak digunakan dalam perancangan-perancangan berbagai peralatan.
Seperti kita ketahui perkembangan kendaraan bermotor khususnya sepeda motor semakin hari semakin pesat perkembangannya, tak lepas dari masih buruknya pelayanan transportasi di negeri kita menuntut adanya suatu solusi yang bisa memecahkan keruwetan dibidang transportasi, yang ditandai dengan para produsen sepeda motor yang berpacu mengeluarkan produk yang saling bersaing. Tercatat salah satu merk terkenal seperti Honda saat ini sudah memproduksi produk sepeda motor-nya hingga mencapai 10 juta sepeda motor. Maka dengan makin maraknya pengguna sepeda motor, diperlukan suatu layanan atau service yang memuaskan bagi para pengguna sepeda motor,sehingga makin baik service maka semakin lama umur onderdil atau suku cadang sepeda motornya.
Alat Balancing System Pada Roda Ban Sepeda Motor ini diharapkan bisa mengurangi cepatnya kerusakan pada onderdil sepeda motor selain itu alat balancing system ini masih dibuat oleh produsen dari luar negeri sehingga kita sangat tergantung oleh teknologi dari luar yang tentunya dengan biaya yang lebih mahal ketimbang produk bikinan dari dalam negeri.
1.2. Maksud dan Tujuan
2 1. Mempelajari dan memahami mikrokontroler AT89S51.
2. Merancang alat yang mampu mendeteksi posisi ban motor apakah dalam posisi miring dalam pemasangannya atau tidak.
3. Memperpanjang umur suku cadang sepeda motor yang tentunya mengurangi biaya perawatan sepeda motor.
4. Dapat diaplikasikan pada bengkel-bengkel sepeda motor.
1.3. Pembatasan Masalah
Pada tugas akhir ini permasalahan dibatasi pada beberapa hal antara lain :
a. Alat yang digunakan sebagai pendeteksi adalah yang berbasis mikrokontroler AT89S51.
b. Informasi posisi kemiringan ban sepeda motor berada pada posisi 800 hingga 1000.
c. Dalam perancangan alat ini pendeteksian kemiringan ban lewat sensor ketelitiannya sebesar 10
d. Informasi kondisi posisi ban sepeda motor ditampilkan pada seven segment. e. Menggunakan tampilan seven segment sebanyak 3 digit.
f. Alat digunakan untuk roda ban pada sepeda motor juga bisa pada roda ban mobil
1.4. Metodologi Penulisan
1. Studi Pustaka, yaitu melakukan penelitian dengan mempelajari literatur yang berhubungan dengan pembuatan tugas akhir diantaranya melalui internet dan memantau langsung ke bengkel-bengkel sepeda motor.
2. Melalui studi lapangan yaitu metode pengumpulan yang diperoleh baik secara langsung seperti wawancara, pengamatan saat ke bengkel-bengkel sepeda motor ataupun secara tidak langsung.
3. Ujicoba sistem, berupa pengukuran dan pengujian dengan alat ukur multi meter busur derajat dan dengan Perangkat lunak.
1.5. Sistematika Penulisan
BAB I PENDAHULUAN
Bab ini menguraikan tentang latar belakang masalah, rumusan masalah, maksud dan tujuan, pembatasan masalah, metodologi penelitian dan sistematika penulisan. BAB II DASAR TEORI
Pada bab ini menguraikan tentang dasar-dasar teori yang digunakan sebagai acuan dalam menyelesaikan proyek tugas akhir ini.
BAB III PERANCANGAN SISTEM
Membahas perakitan hardware dan software dari awal sampai akhir sehingga alat tersebut dapat bekerja dengan baik sebagai alat Balancing System Pada Roda Ban Sepeda Motor Berbasis Mikrokontroler menggunakan tampilan seven segment.
BAB IV PENGUJIAN DAN ANALISA
Memberikan analisa terhadap cara kerja alat, membandingkan antara hasil pengujian pada alat dengan hasil perhitungan secara teoritis.
BAB V KESIMPULAN DAN SARAN
Bab ini berisi kesimpulan dan saran pengembangan proyek Tugas Akhir mengenai Perancangan Alat Balancing System pada Roda Ban Sepeda Motor Berbasis Mikrokontroler.
ABSTRAK
Pertumbuhan kendaraan bermotor khususnya sepeda motor pada masa sekarang semakin hari semakin pesat, maka diperlukan suatu layanan atau service sepeda motor yang baik bagi para pemilik sepeda motor.
Untuk membantu perawatan sepeda motor ini, dibuat alat balancing system berbasis mikrokontroler yang mampu menginformasikan atau mendeteksi posisi kemiringan roda ban sepeda motor.
Dalam perancangannya digunakan sensor optocoupler sebagai sensornya dimana keluarannya yang masih analog berupa tegangan antara 1,10 volt sampai 3,60 volt dikonversikan menjadi data digital oleh rangkaian ADC, Kemudian data yang sudah dikonversikan ke data digital diproses ke bagian mikrokontroler tipe AT89s51 untuk ditampilkan ke sevensegment dan led indikator.
Dari hasil pengukuran sampai kepada hasil pengujian alat secara umum alat yang dibuat dapat berfungsi dengan baik dan diharapkan pengembangannya lebih lanjut untuk memperbaiki kinerja dari alat yang dibuat.
BAB II
DASAR TEORI
2.1 Optocoupler
Optocoupler merupakan salah satu jenis komponen yang banyak dimanfaatkan oleh para penggemar microcontroler. Sensor yang digunakan pada kali ini yaitu sensor optocoupler sebagai sensor untuk menentukan seberapa besar kemiringan terhadap suatu benda. Benda yang diukur oleh sensor ini adalah ban sepeda motor.
Sensor optocoupler ini sangat mudah digunakannya hanya dengan memberikan sumber catudaya +5V dan ground. Pada saat sensor dipasang pada alat yang akan diukur, maka sensor akan memberikan suatu tegangan output sesuai dengan posisi kemiringan alat yang diukur.
Gambar 2.1 Optocoupler
2.2 Mikrokontroler AT89S51
5 dengan kompleksitas tinggi dan mempunyai pemrosesan pusat (Central Processing Unit) sehingga disebut sebagai mikrokomputer.
Microcontroler AT89S51 adalah microcontroler buatan ATMEL Corporation. Mikrokontroler ini termasuk kedalam bagian keluarga mikrokontroler MCS51, varian mikrokontroler 8051 yang memiliki ciri-ciri sebagai berikut:
Kompatibel dengan produk MCS-51
4K byte In System Programmable Flas Memory Dapat dilakukan pemrograman 1000 tulis dan hapus Range catu daya 4,0V s/d 5,0V
Operasi statis: 0 Hz s/d 33 MHz Tiga Tingkat Program memory lock 128 x 8 bit RAM internal
32 Programmable Jalur I/O Dua 16 bit Timer/ Counter Enam Sumber Interupsi Full Duplex Serial Channel
Low Power Idle dan Mode Power Down Watcht Dog Timer
Data Pointer Power Off Flag
Fast Programming Time Fleksibel ISP programming
dari RAM tetapi akan membekukan osilator, menggagalkan semua fungsi chip sampai interupsi eksternal atau reset hardware ditemui.
2.2.1 Fungsi Pin Mikrokontroler AT89S51
Gambar 2.2. Konfigurasi Pin Mikrokontroler AT89S51
1. VCC Tegangan Supply
2. GND Ground
3. Port 0 Port 0, merupakan port I/O 8 bit open drain dua arah. Sebagai sebuah port, setiap pin dapat mengendalikan 8 input TTL. Ketika logika “1” dituliskan ke port 0, maka port dapat digunakan sebagai input dengan high impedansi. Port 0 dapat juga dikonfigurasikan untuk multipleksing dengan address/ data bus selama mengakses memori program atau data eksternal. Pada mode ini P0 harus mempunyai pull up
7
Tabel 2.1. Fungsi khusus dari port 1:
Port Pin Fungsi Alternatif
P1.5 MOSI ( digunakan untuk In System Programming )
P1.6 MISO ( digunakan untuk In System Programming )
P1.7 SCK (digunakan untuk In System Programming )
5. Port 2 Port 2 merupakan port I/O 8 bit dua arah dengan internal pull up. Buffer output port 2 dapat mengendalikan empat TTL input. Ketika logika “1” dituliskan ke port 2, maka port ini akan mendapatkan internal pull up dan dapat digunakan sebagai input. 6. Port 3 Port 3 merupakan port I/O 8 bit dua arah dengan internal pull up.
Buffer output port 3 dapat mengendalikan empat TTL input. Ketika logika “1”dituliskan ke port 3, maka port ini akan mendapatkan internal pull up dan dapat digunakan sebagai input.Port 3 juga melayani berbagai macam fitur khusus, sebagaimana yang ditunjukkan pada tabel berikut:
Tabel 2.2.Fungsi khusus dari port 3:
Port Pin Fungsi Alternatif
P3.0 RXD ( Port Serial Input )
P3.6 WR ( Write Strobe Memori Data Eksternal )
P3.7 WR ( Write Strobe Memori Program Eksternal )
7. RST Input Reset. Logika high “1” pada pin ini untuk dua siklus mesin sementara oscilator bekerja maka akan mereset devais.
mengeluarkan suatu laju konstan 1/6 dari frekuensi oscilator dan dapat digunakan untuk pewaktu eksternal.
9. PSEN Program Store Enable merupakan strobe read untu memori Program eksternal.
10. EA/ VPP Eksternal Access Enable. EA harus di hubungkan ke GND untuk Enable devais, untuk memasuki memori program eksternal mulai alamat 0000H s/d FFFFH. EA harus dihubungkan ke VCC untuk akses memori program internal Pin ini juga menerima tegangan pemrogramman ( VPP) selama pemrograman Flash
11. XTAL1 Input untuk penguat oscilator inverting dan input untuk rangkaian internal clock
12. XTAL2 Output dari penguat oscilator inverting.
2.2.2. Organisasi Memori
Semua device 8051 mempunyai ruang alamat yang terpisah untuk memori program dan memori data.Pemisahan secara logika dari memori program dan data, mengijinkan memori data untuk diakses dengan pengalamatan 8 bit, yang dengan cepat dapat disimpan dan dimanipulasi dengan CPU 8 bit. Selain itu, pengalamatan memori data 16 bit dapat juga dibangkitkan melalui register DPTR. Memori program ( ROM, EPROM dan FLASH ) hanya dapat dibaca, tidak ditulis. Memori program dapat mencapai sampai 64K byte. Pada 89S51, 4K byte memori program terdapat didalam chip. Untuk membaca memori program eksternal mikrokontroller mengirim sinyal PSEN ( program store enable )
9 Di bawah ini dapat dilihat gambar masing-masing perangkat keras (hardware) yang ada pada mikrokontroler MCS51. Didalamnya terdapat CPU, Memory, dan perangkat keras lain yang akan menjalankan instruksi sesuai keinginan programmer.
Gambar 2.3. Diagram blok mikrokontroller 8051
Gambar 2.4. Arsitektur Memori Mikrokontroller 8051
2.2.3. Program Memory
Pada gambar 2.4. menunjukkan suatu peta bagian bawah dari memori program. Setelah reset CPU mulai melakukan eksekusi dari lokasi 0000H. Sebagaimana yang
ditunjukkan pada gambar 2.3. setiap interupsi ditempatkan pada suatu lokasi tertentu pada
memori program. Interupsi menyebabkan CPU untuk melompat ke lokasi dimana harus
dilakukan suatu layanan tertentu.Interupsi Eksternal 0, sebagi contoh, menempati lokasi
lokasi 0003H.Jika interupsi ini tidak digunakan, lokasi layanan ini dapat digunakan untuk
berbagai keperluan sebagai Memori Program.
.
Gambar 2.5. Peta Interupsi mikrokontroller 8051
2.2.4. Memory Data
Memori data internal terpetakan seperti pada gambar 2.5. Ruang memori dibagi menjadi tiga blok, yang diacukan sebagai 128 byte lower, 128 byte upper dan ruang SFR.
11
Gambar 2.6. Memori data internal
Gambar 2.7. RAM internal 128 byte paling bawah
Semua pada lokasi RAM 128 byte paling bawah dapat diakses baik dengan menggunakan pengalamatan langsung dan tak langsung. 128 byte paling atas hanya dapat diakses dengan cara tak langsung.
2.2.5. Special Function Register
diimplementasikan. Akses baca untuk alamat ini akan menghasilkan data random, dan akses tulis akan menghasilkan efek yang tak jelas.
Accumulator
ACC adalah register akumulator. Mnemonik untuk instruksi spesifik akumulator ini secara sederhana dapat disingkat sebagai A.
Register B
Register B digunakan pada saat opersi perkalian dan pembagian. Selain untuk keperluan tersebut diatas, register ini dapat digunakan untuk register bebas.
Program Status Word
Register PSW terdiri dari informasi status dari program yang secara detail ditunjukkan pada Tabel 2.3.
Stack Pointer
Register Pointer stack mempunyai lebar data 8 bit. Register ini akan bertambah sebelum data disimpan selama eksekusi push dan call. Sementara stack dapat berada disembarang tempat RAM. Pointer stack diawali di alamat 07h setelah reset. Hal ini menyebabkan stack untuk memulai pada lokasi 08h.
Data Pointer
Pointer Data (DPTR) terdiri dari byte atas (DPH) dan byte bawah (DPL). Fungsi ini ditujukan untuk menyimpan data 16 bit. Dapat dimanipulasi sebagai register 16 bit atau dua 8 bit register yang berdiri sendiri.
13 Ports 0, 1, 2 dan 3
P0, P1, P2 dan P3 adalah SFR yang ditempati oleh Port 0, 1, 2 dan 3. Menulis suatu logika 1 terhadap sebuah bit dari sebuah port SFR ( P0, P1, P2 atau P3) menyebabkan pin output port yang bersesesuaian akan berada dalam kondisi logika high ‘1’. Dan sebaliknya
Buffer Data Serial
Buffer serial sesungguhnya merupakan dua buah register yang terpisah, buffer pemancar dan buffer penerima. Ketika data diisikan ke SBUF, maka akan menuju ke buffer pemancar dan ditahan untuk proses transmisi. Ketika data diambil dari SBUF, maka akan berasal dari buffer penerima.
Registers Timer
Pasangan register ( TH0, TL0) dan (TH1, TL1) adalah register pencacah 16 bit untuk Timer/ Counter 0 dan 1, masing-masing.
Register Control
Registers IP, IE, TMOD, TCON, SCON, dan PCON terdiri dari bit control dan status.
Program Status Word
PSW atau Program Status Word berisi bit-bit status yang berkaitan dengan kondisi atau keadaan CPU mikrokontroler pada saat tersebut. PSW berada dalam lokasi ruang SFR ( perhatikan pada gambar 2.8. dengan lokasi alamat D0h ). Pada PSW ini kita dapat memantau beberapa status yang meliputi: carry bit, auxiliary carry ( untuk operasi BCD ), dua bit pemilih bank register, flag overflow, sebuah bit paritas dan dua flag status yang bisa didifinisikan sendiri. Bit carry dapat juga anda guakan pada keperluan operasi aritmatika, juga bisa digunakan sebagai universal akumulator untuk beberapa operasi boolean.
Tabel 2.3. Program Status Word
Tabel 2. 4. Alamat rekening bank
2.2.6. Sumber interupsi MCS51
Mikrokontroler AT89S51 mempunyai 2 buah timer, yaitu timer 0 dan timer 1, setiap timer terdiri dari 16 bit timer yang tersimpan dalam 2 buah register yaitu THx untuk timer High Byte dan TLx untuk timer Low Byte yang keduanya dapat berfungsi sebagai counter maupun sebagai timer. Timer mempunyai sumber clock dengan frekuensi tertentu yang sudah pasti sedangkan counter mendapat sumber clock dari pulsa yang hendak di hitung jumlahnya. Aplikasi dari timer atau pewaktu dapat digunakan untuk aplikasi mengitung lamanya suatu kejadian yang terjadi sedangkan counter atau penghitung biasa digunakan untuk aplikasi menghitung jumlah kejadian yang terjadi dalam periode tertentu. Register THx dan TLx diatur oleh register TMOD dan register TCON. Timer dapat diaktifkan melalui perangkat keras maupun perangkat lunak.
15 T = ( 255 – TLx ) * 1 µs
TLx merupakan isi register TL0 atau TL1 2. Sebagai timer/ counter 16 bit
T = (65535 – THx TLx) * 1 µs
THx merupakan isi register TH0 atau TH1 dan TLx merupakan isi register TL0 atau TL1
Register Timer Register Interupsi
TF1 TR1 TF0 TR0 IE1 IT1 IE0 IT0 bersifat bit addressable sehingga bit TF1 dapat disebut TCON.7 dan seterusnya hingga bit IT0 sebagai TCON 0. Register ini hanya mempunyai 4 bit saja yang berhubungan dengan timer seperti akan dijelaskan pada tabel 2.5.
.
Tabel 2.5 Fungsi Bit Register TCON yang Berhubungan dengan Timer
Register TMOD berfungsi untuk pemilihan mode operasi timer/ counter dengan fungsi tiap bitnya adalah sebagai berikut:
- Gate berfungsi pada saat TRx =1, timer akan berjalan tanpa memperhatikan nilai pada Gate (timer di kontrol software)
- C/T berfungsi sebagai pemilihan fungsi timer (0) atau counter (1). - M1 & M0 berfungsi untuk memilih mode timer dengan variasi
Nama Bit Fungsi
TF1 Timer 1 Overflow Flag yang akan diset jika timer overflow
TR1 Membuat timer 1 aktif (set) dan non aktif (clear)
TR0 Timer 0 Overflow Flag yang akan di-set jika timer overflow
Tabel 2.6 Mode Timer
Pada mode ini, AT89C51 seperti memiliki 3 buah timer. Timer 0 terpisah menjadi 2 buah timer 8 bit (TL0 – TF0 dan
TH0 –TF1) dan timer 1 tetap 16 bit
2.3 Catudaya
Catudaya merupakan hal yang paling penting dalam setiap pembuatan suatu perangkat keras.kita perhatikan berapa tegangan yang diperlukan untuk tiap-tiap perangkat yang akan digunakan. Penyearahan adalah proses menyearahkan arus bolak-balik menjadi arus searah. Komponen utama yang diperlukan dalam penyearahan adalah transformator (Trafo), dioda dan kapasitor elektrolit.
2.3.1 Penyearah Gelombang Penuh Sistem CT
Penyearah Gelombang Penuh Sistem CT menggunakan transformator jenis CT dengan dua buah dioda sebagai penyearah. Dioda secara bergantian untuk mengambil pulsa positif dan negatif , sehingga keluaran berupa gelombang penuh
Gambar 2.10 Gelombang Penuh Sistem CT
2.4 LM 7805
17 direkomendasikan tertera pada datasheet komponen tersebut. Berikut ini Contoh IC LM7805 yang diperlihatkan pada gambar 2.11.
Gambar 2.11 IC LM7805
2.5 Resistor
Resistor merupakan komponen dasar elektronika yang berfungsi untuk membatasi arus pada rangkaian, bila tahanannya semakin besar maka semakin kecil pula arus dari keluaran tersebut, sebaliknya jika nilai hambatannya kecil maka akan besar pula arusnya. Resistor bersifat resistif dan umumnya terbuat dari bahan karbon. Dari hukum Ohm diketahui, resistansi berbanding terbalik dengan jumlah arus yang mengalir melaluinya. Satuan resistansi dari suatu resistor disebut Ohm ( ). Tipe resistor yang sekarang banyak digunakan yaitu jenis resistor karbon dan metal film. Untuk mengetahui nilai resistansi dari suatu resistor caranya adalah dengan membaca warna gelang dari resistor atau membaca suatu nilai yang tertera pada badan resistor. Berikut ini Contoh Resistor yang diperlihatkan pada gambar 2.12.
Gambar 2.12 Resistor
2.6 Kapasitor
listrik disimpan pada tiap elektrodanya. Selama kapasitor melakukan pengisian, arus mengalir. Aliran arus tersebut akan berhenti bila kapasitor telah penuh. Yang membedakan tiap - tiap kapasitor adalah dielektriknya. Berikut ini salahsatu Contoh Kapasitor yang diperlihatkan pada gambar 2.13.
Gambar 2.13 Electrolytic Capacitor (Elco)
Kapasitor ELCO mempunyai kutub atau polaritas yaitu tanda positif dan tanda negatif. Jika dalam pemasangan kutub-kutub ELCO terbalik maka kapasitor akan rusak.
2.7 Dioda
Dioda adalah suatu komponen elektronik yang dapat melewatkan arus pada satu arah saja. Ada berbagai macam dioda diantaranya dioda tabung, dioda sambungan P-N dan dioda kontak titik dan sebagainya. Fungsi dioda sangat berperan penting pada rangkaian elektronika, diantaranya mempunyai fungsi untuk menghasilkan tegangan searah dari tegangan bolak-balik. Bentuk dioda yang sering digunakan pada saat sekarang ini terdiri dari semikonduktor jenis P yang dibuat bersambung dengan semikonduktor jenis N.
Gambar 2.14 Simbol Dioda
2.8 Transistor
19
Gambar 2.15 Rangkaian skema dasar konfigurasi saklar menggunakan
transistor
Sesuai dengan rangkaian pada gambar 2.15, agar ada arus yang mengalir dari Vcc maka pada Y0 harus diberi logika 0 sehingga transistor menjadi On (kondisi jenuh) dan mengalirkan arus dari Vcc ke CA, karena sevensegment yang digunakannya menggunakan konfigurasi sevensegment CA (Common Anode)
2.9 Bahasa Pemrograman
Bahasa assembly adalah suatu bentuk bahasa mesin yang mudah dimengerti oleh manusia, sedangkan bahasa mesin dimengerti oleh mikrokontroller. Assembly adalah program komputer yang mentranslitrasi program dari bahasa assembly ke bahasa mesin, Sedangkan bahasa assembly adalah ekuivalensi bahasa mesin dalam bentuk alpanumerik. Mnemonics alpanumerik digunakan sebagai alat bantu bagi programmer untuk memprogram mesin komputer daripada menggunakan serangkaian 0 dan 1 (bahasa mesin) yang panjang dan rumit. Bahasa assembly menghasilkan program yang kecil dan cepat.
2.9.1 Instruksi Bahasa Assembly
Ada beberapa perangkat lunak (software) yang dapat digunakan sebagai program bantu untuk membuat dang mensimulasikan program, diantaranya AVSIM51, ALDS dan Pinnacle. Pinnacle memiliki beberapa fitur yang cukup lengkap seperti : Register Data Pointer (DPTR), Ports, Timer, Internal RAM, External RAM dan lain-lain. Program sumber (source code) dibuat dengan pinnacle 52, hasil kerja program yang telah dikompile dalam bahasa assembler ini adalah assembly listing. Instruksi yang digunakan dalam penyusunan program adalah sebagai berikut :
EQU
ORG (Origin)
Digunakan untuk mengarahkan lokasi tempat instruksi yang ada dibawahnya CLR
Memberikan nilai “0” pada bit tertentu SETB
Memberikan nilai ”1” pada bit tertentu CALL
Merupakan instruksi untuk melakukan lompatan dengan area sebesar 2 KB LCALL
Instruksi ini hampir sama dengan instruksi CALL, hanya saja instruksi ini digunakan jika label yang dipanggil letaknya lebih jauh dari 2 KB
MOV
Intruksi ini berfungsi melakukan pemindahan data dari variabel pada kode operasi kedua dan disimpan di variabel pada kode operasi pertama.
MOVC
Intruksi ini digunakan untuk memori program. Tanda ‘@’ digunakan untuk menandai A+DPTR yang berfungsi untuk menyatakan lokasi memori yang isinya disalin ke akumulator A, dalam hal ini nilai tersimpan dalam DPTR (Data Pointer Register) ditambah dengan nilai yang tersimpan dalam akumulator A sama dengan lokasi memori program yang diakses.
JMP
Digunakan untuk melakukan lompatan dan menjalankan program yang berada dialamat yang ditentukan oleh label tertentu.
SJMP
Digunakan untuk melakukan lompatan untuk jarak yang pendek ( Short JUMP) LJMP
Instruksi ini berfungsi untuk melakukan lompatan untuk jarak yang jauh (Long Jump) JB
Lompat jika Bit tertentu bernilai 1, artinya jika bit yang telah ditentukan bernilai 1, maka lompat ke alamat yang telah ditentukan dan dilanjutkan ke instruksi berikutnya. JNB
21 Instruksi ini berfungsi melakukan pengurangan pada Rn (R0…….R7) dengan 1 dan lompat ke alamat yang ditentukan apabila hasilnya bukan 00. apabila hasilnya telah mencapai 00, maka program akan terus menjalankan instruksi dibawahnya.
CJNE
Instruksi ini berfungsi melakukan perbandingan antara data tujuan dan data sumber serta melakukan lompatan ke alamat yang ditentukan jika hasil perbandingan tidak sama.
RET
Digunakan untuk melakukan lompatan ke alamat yang disimpan dalam SP dan SP-1. Instruksi ini biasa digunakan pada saat kembali dari subrutin yang dipanggil dengan instruksi ACALL atau LCALL.
END
BAB III
PERANCANGAN SISTEM
Pada bab perancangan sistem ini membahas tentang prinsip kerja, perancangan perangkat keras (hardware) dan perangkat lunak (software) dari masing-masing blok rangkaian.
3.1 Perancangan Perangkat Keras
Pada bab ini akan dibahas tentang perancangan sebuah alat yang meliputi diagram blok rangkaian dengan prinsip kerja dari masing-masing blok rangkaian yang digunakan.
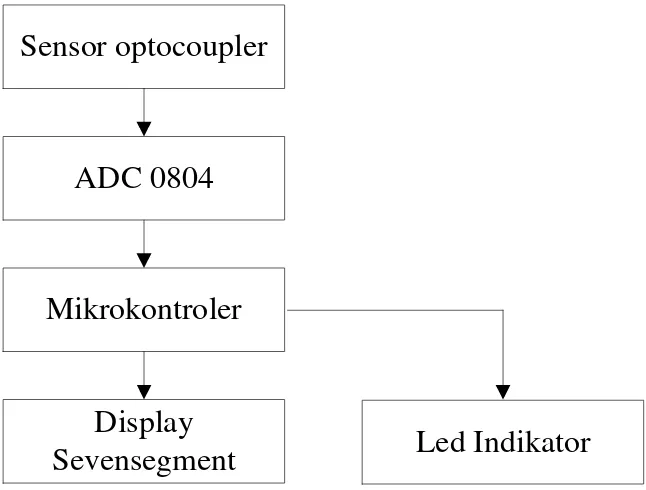
3.1.1 Blok Diagram Sistem
Di bawah ini adalah diagram blok secara keseluruhan :
Gambar 3.1. Blok Diagram Sistem
Sensor optocoupler
ADC 0804
Mikrokontroler
Display
23 Prinsip kerja pada bagian blok adalah sebagai berikut :
a. Sensor Optocoupler berfungsi untuk mendeteksi seberapa besar sudut kemiringan benda yang diukur lewat gerakan jarum pada Optocoupler
b. ADCberfungsi untuk mengubah data analog menjadi data digital sebanyak 8 bit c. Microcontroler akan mengolah data dari ADC menjadi tampilan lewat display seven segment.
d. Display seven segment berfungsi untuk menampilkan berapa sudut kemiringan ban sepeda motor yang ditampilkan berupa angka.
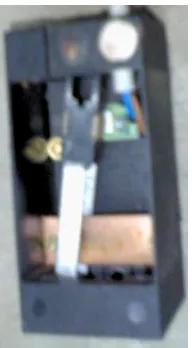
3.1.2 Rangkaian Sensor
Rangkaian sensor optocoupler ini digunakan untuk mendeteksi pergerakan jarum penghitung sudut kemiringan ban sepeda motor dimana hasil outputnya berupa tegangan (volt), sensor ini sudahdalam bentuk yang menyatu untuk masukan data dari sensor digunakan Pin 6 (+ in) pada rangkaian IC ADC 0804, jika jarum tersebut telah bergerak, maka sensor akan mengirimkan data tersebut ke ADC dan diteruskan ke mikrokontroler untuk ditampilkan ke display seven segment.
Gambar 3.2. Sensor Optocoupler
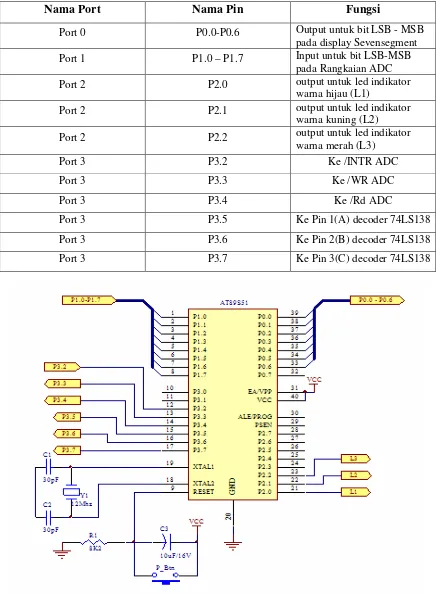
3.1.3 Rangkaian Mikrokontroler
Tabel 3.1. Pin-pin AT89S51 yang digunakan pada mikrokontroler
Nama Port Nama Pin Fungsi
Port 0 P0.0-P0.6 Output untuk bit LSB - MSB
pada display Sevensegment
Port 1 P1.0 – P1.7 Input untuk bit LSB-MSB
pada Rangkaian ADC
Port 2 P2.0 output untuk led indikator
warna hijau (L1)
Port 2 P2.1 output untuk led indikator
warna kuning (L2)
Port 2 P2.2 output untuk led indikator
warna merah (L3)
Port 3 P3.2 Ke /INTR ADC
Port 3 P3.3 Ke /WR ADC
Port 3 P3.4 Ke /Rd ADC
Port 3 P3.5 Ke Pin 1(A) decoder 74LS138
Port 3 P3.6 Ke Pin 2(B) decoder 74LS138
Port 3 P3.7 Ke Pin 3(C) decoder 74LS138
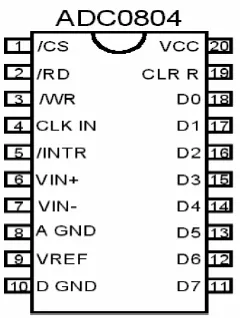
25 3.1.4 Rangkaian ADC
Konverter A/D tersedia secara komersial sebagai rangkaian terpadu dengan resolusi 8 bit sampai dengan 16 bit. Pada tugas akhir ini akan memperkenalkan ADC0804, yaitu sebagai sebuah konverter A/D 8 bit yang mudah diinterfacekan dengan sistem mikrokontroller. A/D ini menggunakan metode approksimasi berturut-turut untuk mengkonversikan masukan analog (0-5V) menjadi data digital 8 bit yang ekivalen. ADC0804 mempunyai pembangkit clock internal dan memerlukan catu daya +5V dan mempunyai waktu konversi optimum sekitar 100us.
Gambar 3.4. Konfigurasi pin ADC0804
Gambar 3.5. Schematic ADC 0804
rendah keduanya, keluaran digital akan muncul pada saluran keluaran. Sinyal mulai konversi pada WR (pin 3).
Untuk memulai suatu konversi, CS harus rendah. Bilamana WR menjadi rendah, konverter akan mengalami reset, dan ketika WR kembali kepada keadaan high, konversi segera dimulai. Konversi detak konverter harus terletak dalam daereh frekuensi 100 sampai 800kHz. CLK IN (pin4) dapat diturunkan dari detak mikrokontroller, sebagai kemungkinan lain, kita dapat mempergunakan pembangkit clock internal dengan memasang rangkaian RC antara CLN IN ( pin 4) dan CLK R (pin19). Pin 5 adalah saluran yang digunakan untuk INTR, sinyal selesai konversi. INTR akan menjadi tinggi pada saat memulai konversi, dan akan aktif rendah bila konversi telah selesai.
Tepi turun sinyal INTR dapat dipergunakan untuk menginterupsi sistem mikrokontroller, supaya mikrokontroller melakukan pencabangan ke subroutine pelayanan yang memproses keluaran konverter. Pin 6 dan 7 adalah masukan diferensial bagi sinyal analog. A/D ini mempunyai dua ground, A GND (pin 8) dan D GND ( pin10). Kedua pin ini harus dihubungkan dengan ground. Pin 20 harus dihubungkan dengan catu daya +5V A/D ini mempunyai dua buah ground, A GND (pin8) dan D GND (pin10). Keduanya harus dihubungkan dengan catu daya, sebesar +5V. Pada A/D 0804 REF V merupakan tegangan referensi yang digunakan untuk offset suatu keluaran digital maksimum. Dengan persamaan sebagai berikut:
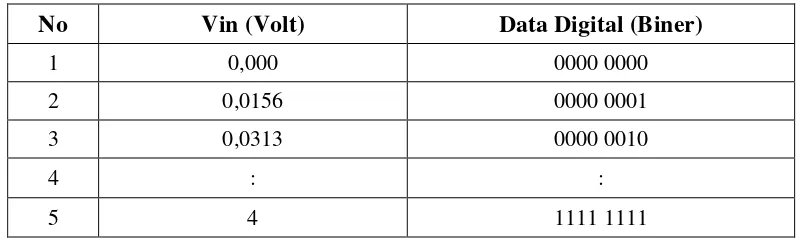
Vref = ½ V IN maks
Vresolusi = V IN maks
255
Misalnya anda menginginkan masuk analog maksimum sebesar 4 V, maka: VREF = ½ x 4 = 2 volt
Vresolusi = 4/255= 0,0156 V
Resolusi ini mempunyai arti sebagai berikut:
27 A/D ini dapat dirangkai untuk menghasilkan konversi secara kontinu. Untuk melaksanakannya, kita harus menghubungkan CS, dan RD ke ground dan menyambungkan WR dengan INTR. Maka dengan ini keluaran digital yang kontinu akan muncul, karena sinyal INTR menggerakkan masukan WR. Pada akhir konversi INTR berubah menjadi low, sehingga keadaan ini akan mereset konverter dan mulai konversi.
Tabel 3.3 Koneksi Interface ADC ke Mikrokontroler
ADC MIKROKONTROLER
/INTR P3.2
/WR P3.3
/RD P3.4
D0 s/d D7 P1.0 s/d P1.7
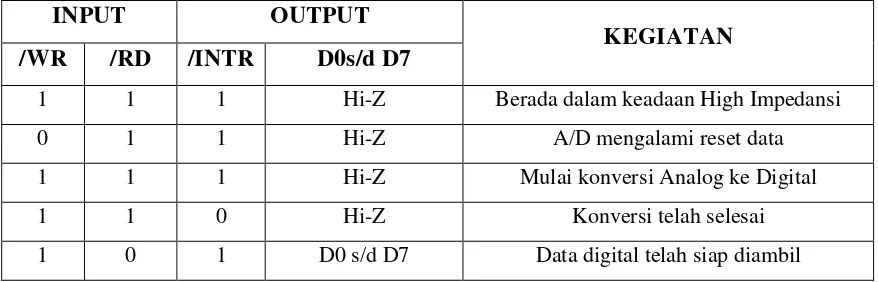
Tabel 3.4. Instruksi logika pada pin kontrol A/D 0804
INPUT OUTPUT
/WR /RD /INTR D0s/d D7 KEGIATAN
1 1 1 Hi-Z Berada dalam keadaan High Impedansi
0 1 1 Hi-Z A/D mengalami reset data
1 1 1 Hi-Z Mulai konversi Analog ke Digital
1 1 0 Hi-Z Konversi telah selesai
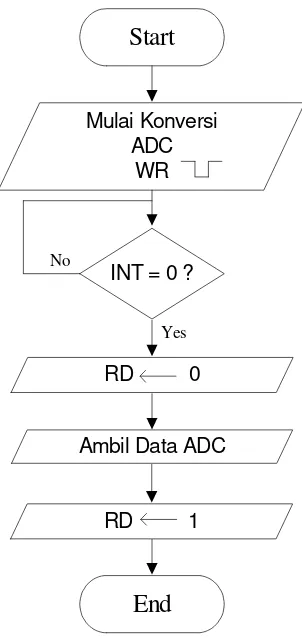
Gambar 3.6 Diagram Alir Proses ADC
3.1.5 Rangkaian Display Seven segment
Gambar 3.7 Rangkaian Seven segment Start
Mulai Konversi ADC
WR
INT = 0 ?
RD 0
Ambil Data ADC
RD 1
End No
29
Gambar 3.8 Rangkaian Dekoder IC 74LS138
Tabel 3.5. kebenaran 74LS138
SELEKTOR ENABLE OUTPUT
C B A G1 /G2A /G2B Y0 Y1 Y2 Y3 Y4 Y5 Y6 Y7
0 0 0 1 0 0 0 1 1 1 1 1 1 1
0 0 1 1 0 0 1 0 1 1 1 1 1 1
0 1 0 1 0 0 1 1 0 1 1 1 1 1
0 1 1 1 0 0 1 1 1 0 1 1 1 1
1 0 0 1 0 0 1 1 1 1 0 1 1 1
1 0 1 1 0 0 1 1 1 1 1 0 1 1
1 1 0 1 0 0 1 1 1 1 1 1 0 1
1 1 1 1 0 0 1 1 1 1 1 1 1 0
Pada tabel kebenaran tersebut tampak bahwa seven segmen yang hidup tergantung pada output dari dekoder 74LS138, yang sedang mengeluarkan logika low ”0”, sehingga dari 8 buah display tersebut, selalu hanya satu display yang akan dihidupkan. Agar display tampak nyala secara bersamaan maka ketiga display tersebut
harus dihidupkan secara bergantian dengan waktu tunda tertentu.
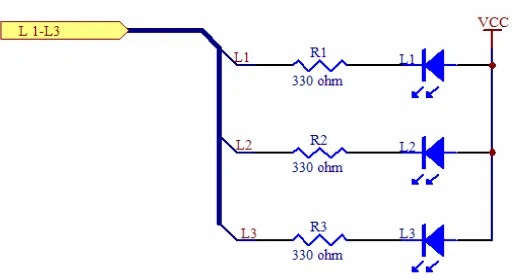
3.1.6 Rangkaian Led Indikator
Tabel 3.6 Led Indikator Posisi benda
Warna Led Posisi Kemiringan Ban Sepeda Motor
Hijau (L1) 890 - 910
Kuning (L2) 870 - 880 atau 920 - 930
Merah (L3) 800 - 860 atau 940 - 1000
Dari tabel di atas kita bisa lihat posisi kemiringan ban sepeda motor baik melihat dari sevensegment maupun lewat indikator lampu led. Led ini berfungsi sebagai tanda bila led berwarna hijau menyala, maka posisi ban sepeda motor masih baik. Bila lampu led berwarna kuning menyala maka posisi ban sepeda kurang baik dan bila lampu led berwarna merah ,maka posisi ban sepeda motor sudah buruk dalalm pemasangannya
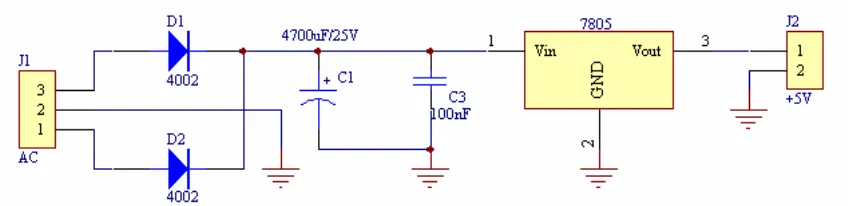
3.1.7 Power Supply
Pada bagian rangkaian ini power supply merupakan bagian yang penting dari semua rangkaian. Power Supply berfungsi untuk memberikan supply tegangan, khususnya ke IC mikrokontroler AT89S51 dan modul rangkaian lain yang bekerja pada tegangan 5 Volt DC. Regulator DC ini menggunakan dua buah dioda sebagai penyearah dengan mode penyearah gelombang penuh dari AC ke DC. Transformator yang digunakan adalah transformator jenis CT (Center Tap), untuk itu IC regulator yang digunakan adalah IC regulator bertipe LM 7805. Berikut merupakan gambar rangkaian dari sistem power supply yang digunakan untuk menghasilkan tegangan keluaran 5 Volt DC pada sistem.
31 3.2 Perancangan Perangkat Lunak
Pada bagian perancangan ini berfungsi untuk mengendalikan keseluruhan sistem dari alat. Perangkat lunak ini berisikan program yang nantinya disimpan di dalam mikrokontroler, sehingga mikrokontroler melaksanakan perintah-perintahnya secara otomatis sesuai dengan urutan program yang dibuat Untuk mendukung perancangan ini penulis menggunakan software Pinnacle 52 dengan bahasa yang digunakan yaitu bahasa assambler MCS-51.
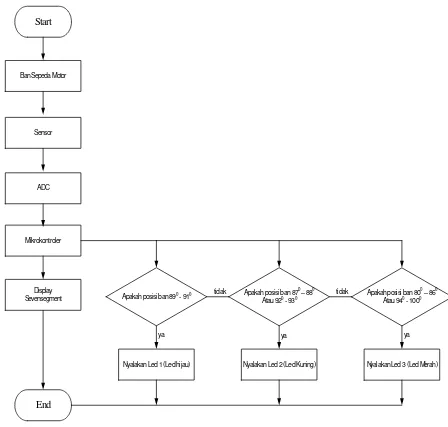
3.2.1 Flowchart Keseluruhan Tentang Cara Kerja Alat
Flowchart cara kerja alat Balancing Ban Sepeda motor dapat dilihat pada gambar 3.10
Gambar 3.11. Flowchart Keseluruhan Cara Kerja Alat
Sevensegment Apakah posisi ban 890 - 910
Nyalakan Led 1 (Led hijau)
Apakah posisi ban 870
Nyalakan Led 2 (Led Kuning)
Apakah posisi ban 800 – 860 Atau 940
- 1000
Nyalakan Led 3 (Led Merah) tidak
3.2.2 Flowchart Program Tampilan pada Sevensegment
Gambar 3.12 Flowchart Program Tampilan pada Seven segment
Inisialisasi data A Ratusan DPTR Alamat 7segment
Start
Ubah Data A Ke Kode 7segment A Ratusan + alamat 7segment
Ubah Data A Ke Kode 7segment A Ratusan + alamat 7 segment
Ubah Data A Ke Kode 7segment A Ratusan + alamat 7 segment
33
BAB IV
PENGUJIAN DAN ANALISA
Pada bab ini akan dibahas tentang pengujian berdasarkan perencanaan dari sistem yang dibuat. Pengujian ini dilaksanakan untuk mengetahui kemampuan dari sistem dan untuk mengetahui apakah sistem sudah berjalan sesuai dengan yang direncanakan.
4.1 Pengujian Perangkat Keras ( Hardware )
Pada pengujian hardware dilakukan pada setiap sinyal masukan dan sinyal keluaran dari tiap-tiap blok rangkaian yang di uji satu persatu. Pengujian dilakukan dengan mengukur tegangan input dan tegangan output pada setiap blok rangkaian alat tersebut..
Pengujian hardware dilakukan pada tiap-tiap blok rangkaian alat, meliputi: 1. Rangkaian Catu Daya.
2. Rangkaian Sensor Optocoupler. 3. Rangkaian Sevensegment
Pada pengujian ini alat yang digunakan ialah multimeter digital.
4.1.1 Pengujian Catu Daya
Pengujian dilakukan dengan cara mengukur tegangan keluaran pada kaki output IC LM7805 (voltage regulator), karena pada perancangan alat ini hanya dibutuhkan tegangan sebesar 5 VDC, dan penggujian dilakukan dengan menggunakan multimeter digital. Adapun hasil pengukuran adalah sebagai berikut :
Tabel 4.1 Pengukuran Catu Daya
INPUT OUTPUT
12 VAC 4.90 VDC
Hasil pengukuran pada tabel diatas menunjukan bahwa keluaran tegangan untuk IC LM7805 sebesar + 4,90 VDC . Dari hasil pengukuran tersebut dapat diambil
4.1.2 Pengujian Sensor Optocoupler
Gambar 4.1. Sensor Optocoupler
Gambar 4.1 merupakan sensor yang digunakan pada alat balance pada ban sepeda motor. Pengujian pada rangkaian sensor dilakukan dengan cara mengukur tegangan kaki output sensor, Berikut adalah hasil pengujian dan pengukuran yang dapat dilihat pada tabel 4.3. dari hasil pengujian, pada saat sensor dipasang pada posisi kemiringan minimum yaitu sebesar 800 kondisi output sensor 1.10 V dan pada saat sensor pada posisi kemiringan maksimum yaitu sebesar 1000 kondisi output sensor 3,60 V.
4.2. Posisi sensor pada kondisi baik
35
4.3. Posisi sensor pada kondisi kurang baik
Pada gambar 4.3. terlihat posisi bandul pada sensor berada pada posisi 920. kondisi ini merupakan kondisi yang kurang baik dalam pemasangan roda ban. Selain sudut 920 ada sudut yang dianggap kurang baik yaitu sudut 870 - 880 dan sudut 930 yang diindikasikan dengan led indikator berwarna kuning pada tampilan display-nya.
4.4. Posisi sensor pada kondisi buruk
Tabel 4.2. Hasil Pengujian Sensor Optocoupler
Berdasarkan hasil pengujian sensor optocoupler ,kita bisa lihat seberapa besar perubahan pada data Vout ini tergantung dari posisi sensor ketika dipasang. Penunjukan keterangan pada tabel diatas didapat dari studi lapangan yang dilakukan pada beberapa teknisi dibeberapa bengkel motor.
4.1.3 Pengujian Rangkaian Seven segment
37 4.2 Pengujian Perangkat Lunak
Pada tugas akhir ini perangkat lunak yang digunakan adalah pinnacle 5.2, perangkat lunak ini sangat penting untuk mengendalikan dalam perancangan alat ini. Pada pengujian dilakukan dengan cara mensimulasikan program, kemudian hasilnya di pasang langsung di sistem minimum.Tampilan pada pinnacle 5.2 ketika program di jalankan, tampak terlihat pada gambar 4.5.
Gambar 4.5. Tampilan pada software pinnacle 5.2
4.2.1 Pengujian Program
Pada saat pertama kali alat dijalankan dan dipasang pada ban sepeda motor, maka display seven segment akan memberikan informasi tampilan berupa angka dari 800 sampai 1000 dan led indikator, tergantung dari inputan sensor yang dikonversikan oleh rangkaian ADC. dapat dilihat seperti ditunjukan pada gambar di bawah ini.
Gambar 4.7. Posisi ban pada kemiringan 900
Gambar 4.8. Posisi ban pada kemiringan 91
Pada gambar 4.6 sampai gambar 4.8 posisi ban sepeda motor berada pada kemiringan 890, 900 dan 910, ini berarti ini berarti bahwa ban sepeda motor berada pada posisi yang masih baik. Selain di tampilkan pada tampilan seven segment, tampak menyala pula lampu led berwarna hijau sebagai indikatornya.
39
Gambar 4.10. Posisi ban berada pada kemiringan 880
Gambar 4.11. Posisi ban berada pada kemiringan 920
Gambar 4.12. Posisi ban berada pada kemiringan 930
Gambar 4.13. Posisi ban berada pada kemiringan 840
Gambar 4.14. Posisi ban berada pada kemiringan 850
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Berdasarkan hasil dari beberapa percobaan dan analisa, maka dapat disimpulkan sebagai berikut:
1. Berdasarkan hasil percobaan yang dilakukan langsung pada ban sepeda motor, sensor optocoupler yang terpasang pada ban sepeda motor, sensor optocoupler akan memberikan tegangan keluaran dimana rentang tegangan antara 1,10Vdc hingga 3,60Vdc.
2. Nilai data didapat dari hasil output sensor optocupler yang dikonversi dengan meggunakan rangkaian ADC 0804 agar menghasilkan data digital.
3. Posisi ideal yang dapat diukur sesuai dengan kondisi yang baik adalah antara 890- 910 dan untuk posisi kurang baik adalah 870- 880 dan 920- 930 serta posisi ban dalam kondisi buruk adalah 840- 860 dan 940 - 960, karena mustahil posisi ban sepeda motor melebihi pada posisi 800 hingga 1000.
5.2 Saran
Perancangan alat ini masih jauh dari kata sempurna, untuk itu perlu diadakan pengembangan lebih lanjut lagi dalam proses perancangan dan aplikasinya. Adapun saran yang dapat disampaikan kepada pihak-pihak yang ingin mengembangkan sistem ini sebagai berikut:
1. Menggunakan variasi yang lain dalam hal penampilan seperti menggunakan tampilan display seven segment yang lebih besar ukurannya supaya jelas ketika melihat hasil tampilannya walau dari jarak yang agak jauh.
2. Memanfaatkan komunikasi serial sehingga bisa ditampilkan juga pada PC. 3. Menambah digit angka sehingga menambah tingkat ketelitian dalam
43
DAFTAR PUSTAKA
1. Afgianto Eko Putra. Belajar Mikrokontroler AT89C51/52/55 (Teori dan Aplikasi Edisi 2), Gava Media, Yogyakarta, 2004
2. Triwiyanto, Microcontroller AT89s51 Trainer Kit User Manual,Surabaya 3. Hidayat. Modul Praktikum Mikroprosesor. Bandung, UNIKOM, 2006 4. Malvino & Paul Albert. Prinsip-Prinsip Elektronik. Jakarta, Erlangga, 1992
RIWAYAT PENULIS
Nama : Arif Darmansyah
Tempat, tanggal lahir : Bandung, 28 Juli 1978
Alamat : Jl. Merkuri Timur Blok U No.41/11 Komp.Margahayu
Raya Bandung 40286
Jenis Kelamin : Laki – laki
Agama : Islam
Phone : 022-75602482
Pendidikan :
1984 – 1990 : SDN PINDAD III BANDUNG
1990 – 1993 : SLTP NEGERI 30 BANDUNG
1993 – 1996 : STM NEGERI 1 BANDUNG
Kerja Praktek :
DINAS KOMINFO SUMEDANG