BODY MASS INDEX MEASURING TOOLS
TUGAS AKHIR
Oleh :
Muhammad Zaki Ulinnuha NIM. 20133010025
PROGRAM STUDI DIPLOMA III TEKNIK ELEKTROMEDIK
UNIVERSITAS MUHAMMADIYAH YOGYAKARTA
i
ALAT PENGUKUR INDEKS MASSA TUBUH
Ditunjukan Kepada Politeknik Muhammadiyah Yogyakarta Untuk Memenuhi
Sebagian Persyaratan Guna Memperoleh Gelar Ahli Madya (A.Md)
Program Studi Teknik Elektromedik
Oleh
Muhammad Zaki Ulinnuha NIM. 20133010025
PROGRAM STUDI DIPLOMA III TEKNIK ELEKTROMEDIK
UNIVERSITAS MUHAMMADIYAH YOGYAKARTA
ii
LEMBAR PERNYATAAN
Penulis menyatakan bahwa dalam tugas akhir ini tidak terdapat karya
yang pernah diajukan untuk memperoleh derajat profesi ahli madya atau gelar
kesarjanaan pada suatu perguruan tinggi dan sepanjang pengetahuan penulis tidak
terdapat pendapat yang pernah ditulis atau diterbitkan orang lain, kecuali yang
secara tertulis diacu dalam naskah ini serta disebutkan dalam daftar pustaka.
Yogyakarta, Oktober 2016 Yang menyatakan,
iii
KATA PENGANTAR
Puji syukur ke hadirat Allah Yang Maha Kuasa, yang masih
melimpahkan rahmat dan barokah-Nya sehingga penulis dapat menyelesaikan
tugas akhir yang berjudul “Alat Pengukur Indeks Massa Tubuh”. Tugas akhir ini
merupakan salah satu persyaratan akademis untuk menyelesaikan studi diploma
III program studi Teknik Elektromedik Universitas Muhammadiyah Yogyakarta.
Keberhasilan dalam melakukan penelitian dan penyusunan laporan
tugas akhir ini tidak semata-mata karena sebuah keberuntungan yang kami
peroleh, akan tetapi kami mendapat banyak bantuan dalam bentuk saran,
dorongan dan bimbingan dari banyak pihak terutama teman maupun dosen
pembimbing yang merupakan motivasi terbesar yang tidak dapat di ukur dengan
materi. Oleh karena itu dengan segala hormat dan kerendahan hati perkenankan
kami mengucapkan banyak terimakasih yang tak terhingga kepada :
1. Terimakasih saya ucapkan kepada kedua Orang tua yaitu Bapak dan Ibu kami
yang telah memberikan do‟a, bimbingan serta motivasi yang tak pernah ada
kata lelah dan bosan.
2. Bapak Dr. Sukamta, S.T., M.T., selaku Direktur program Vokasi yang telah
memberikan izin kepada penulis untuk menuntut dan mencari ilmu, belajar
sebayak-banyaknya di Vokasi pada program studi Teknik Elektromedik.
3. Bapak Tatiya Padang Tunggal, S.T, selaku Ketua Program Studi Teknik
iv
4. Bapak Kuat Supriyadi, BE., S.E., S.T., selaku pembimbing dari rumah sakit
yang telah memberikan bimbingan terbaik kepada penulis dalam bidang
akademik maupun non akademik.
5. Seluruh staff, karyawan dan dosen Universitas Muhammadiyah Yogyakarta
yang telah banyak memberikan masukan-masukan dan semangat serta
dorongan kepada penulis.
6. Bapak/Ibu dosen penguji, yang telah berkenan menguji hasil penelitian dari
penulis dan memberikan hal-hal terbaik bagi penulis, kritik, saran dan
masukan agar penulis menjadi lebih baik lagi dari sebelumnya.
7. Seluruh teman-teman Teknik Elektromedik Universitas Muhammadiyah
Yogyakarta angkatan 2013 yang banyak memberikan masukan, semangat
serta dorongan kepada penulis.
8. Seluruh pihak yang telah membantu dan ikut berpartisipasi dalam penelitian
tugas akhir.
Penulis menyadari bahwa laporan yang penulis susun masih jauh dari
kata sempurna dan masih banyak terdapat kekurangan, oleh karena itu penulis
mengharapkan kepada pembaca agar memberikan kritik dan saran yang
membangun sehingga laporan yang kami susun dapat lebih baik lagi. Ahir kata
semoga laporan ini memberikan manfaat kepada kita semua.Amin.
Yogyakarta, September 2016
v
1.5.1. Manfaat teoritis ... 4
1.5.2. Manfaat praktis ... 4
BAB II TINJAUAN PUSTAKA ... 5
2.1. Penelitian Terdahulu ... 5
2.2. Berat Badan ... 5
2.2.1. Kegemukan/obesitas ... 7
2.2.2. Kurus ... 8
2.2.3. Berat badan ideal ... 9
2.2.4. Indeks massa tubuh (IMT) ... 12
2.3. Tinggi Badan ... 13
vi
2.5. Sensor Jarak... 15
2.5.1. Cara kerja sensor ultrasonic ... 15
2.5.2. Rangkaian sensor ultrasonic ... 17
2.5.3. Sensor ultrasonic HC-SR04 ... 20
2.6. Sensor Berat ... 21
2.7.8. Automatic (software) reset ... 33
2.7.9. USB overcurrent protection ... 34
2.8. LCD (Liquid Crystal Desplay) ... 34
BAB III METODE PENELITIAN ... 40
3.1. Keseluruhan Alat dan Bahan ... 40
3.2. Perakitan Rangkaian ... 40
3.3. Variable Penelitian ... 41
3.4. Definisi Operasional ... 41
3.5. Diagram Blok Modul ... 42
3.6. Diagram Alir Modul ... 43
3.7. Diagram Mekanis ... 45
3.8. Langkah Perakitan ... 46
3.8.1. Langkah perkitan power supply ... 46
3.8.2. Hasil perakitan power supply ... 47
3.8.3. Langkah perakitan keseluruhan komponen ... 47
3.8.4. Hasil perakitan keseluruan komponen ... 48
3.8.5. Rangkaian keseluruhan ... 49
vii
BAB IV METODE PENELITIAN ... 51
4.1. Spesefikasi Alat ... 51
4.2. Gambar Alat ... 51
4.3. Cara Kerja Alat... 52
4.4. Langkah Penggunaan Alat ... 52
4.5. Jenis Penelitian ... 53
4.6. Pengujian Modul ... 53
4.6.1. Pengukuran modul tinggi badan ... 55
4.6.2. Pengukuran modul berat badan ... 55
4.6.3. Pengukuran modul indeks massa tubuh ... 56
4.6.4. Perbandingan modul ... 57
4.7. Pengukuran Indeks Massa Tubuh ... 58
4.7.1. Hasil Pengukuran IMT A ... 58
4.7.2. Hasil Pengukuran IMT B ... 58
4.7.3. Hasil Pengukuran IMT C ... 59
4.8. Pembahasan Kinerja Sistem ... 59
4.9. Kelebihan dan Kekurangan Modul TA ... 60
4.10.1. Kelebihan modul TA ... 60
4.10.2. Kekurangan modul TA... 60
BAB V KESIMPULAN DAN SARAN ... 61
5.1. Kesimpulan... 61
5.2. Saran ... 61
viii
DAFTAR TABEL
Tabel 2.1 Spesifikasi arduino uno ... 28
Tabel 2.2. Konfigurasi LCD ... 35
Tabel 2.3. Fungsi pin pada LCDCaracter ... 36
Tabel 2.4. Function Set ... 36
Tabel 2.5. Entry Mode Set ... 37
Tabel 2.6. Display ON-OFF atau Kursor... 37
Tabel 2.7. Display Clear ... 38
Tabel 2.8. Sift Right atau Left ... 38
Tabel 2.9. Pemilihan Lokasi RAM LCD Character ... 39
Tabel 4.1. Pengukuran tinggi badan ... 55
Tabel 4.2. Pengukuran berat badan ... 56
Tabel 4.3. Pengukuran indeks massa tubuh ... 56
Tabel 4.4. Perbandingan modul ... 57
Tabel 4.5. Pengukuran IMT A ... 58
Tabel 4.6. Pengukuran IMT B ... 58
ix
DAFTAR GAMBAR
Gambar 2.1. Cara kerja sensor ultrasonik dengan transmitter dan receiver ... 16
Gambar 2.2. Rangkaian dasar dari transmitter ultrasonic ... 19
Gambar 2.3. Rangkaian dasar receiver sensor ultrasonic ... 19
Gambar 2.4. Sensor ultrasonik HC-SR04 ... 20
Gambar 2.5. Strain guage ... 22
Gambar 2.6. Sistem kerja strain guage ... 23
Gambar 2.7. Arduino Uno ... 26
Gambar 2.8. LCD (Liquid Crystal Desplay) ... 34
Gambar 3.1 Blok Diagram ... 42
Gambar 3.2. Flow chart ... 43
Gambar 3.3. Diagram mekanis... 45
Gambar 3.4. scematic power supply ... 46
Gambar 3.5. Lay out power supply ... 46
Gambar 3.6. Scematic rangkaian minimum sistem ... 48
Gambar 3.7. Scematic rangkaian keseluruhan ... 48
Gambar 4.1 Alat modul Tugas Akhir ... 51
Gambar 4.2. Alat pembanding tinggi badan ... 54
Kata kunci : Indeks massa tubuh ALAT PENGUKUR INDEKS MASSA TUBUH
ABSTRAK
MUHAMMAD ZAKI ULINNUHA 2013 301 0025
Pengukuran indeks massa tubuh adalah suatu yang digunakan untuk proses pengukuran dan identifikasi, dimana sebagai media pengukuran digunakan sensor ultrasonic dan sensor load cell, karena kedua sensor ini mampu mengukur tinggi dan beban. Pada alat ini menggunakan microcontroller sebagai kontrol dari keseluruhan alat.
Alat pengukur tinggi dan berat badan ini dilengkapi dengan perhitungan indeks massa tubuh yang di dapatkan dari hasil pengukuran tinggi yang di ukur menggunakan sensor ultrasonic HC-SR04 dan berat badan yang di ukur menggunakan load cell NA2. Prinsip kerjanya ketika sensor ultrasonic memancarkan sinyal ultrasonic dan mengenai objek akan diterima oleh receiver lalu di teruskan ke microcontroller untuk menentukan tinggi objek yang di ukur. Load cell akan mengukur beban pada inti besinya, maka nilai resistansi pada stain guage akan berubah.
Bedasarkan hasil pengukuran sensor ultrasonic dengan menggunakan dua sampel dapat disimpulkan memiliki kesalahan (%error) sebesar 0,054 Sedangkan untuk sensor berat dengan menggunakan dua sampel dapat disimpulkan memiliki kesalahan(%error) sebesar 0,110 dari total pengukuran yang dilakukan sebanyak 20 kali.
Key Word : Body mass index.
BODY MASS INDEX MEASURING TOOLS ABSTRACT
MUHAMMAD ULINNUHA ZAKI 2013 301 0025
Measurement body mass index that was used for the measurements and identification, media mesurement used ultrasonic sensor and load cell sensor, because the both is capabel of measureing heights and weights. This tool used a microcontroller as the overall control of the tool.
Tool for measureing height and weight is equpped whit a body mass index calculations in the get of thre height measurement results in measurement using ultrasonic sensors SR04-HC and weight in the measure using load cell NA2. The principle of ultrasonic sensor works when transmitting ultrasonic signals and hit the objects and will be accepted by the receive and then in the forward to the
microcontroller to determine the height of the object in the
measurement. Load cell will measure the load on the iron core, then the value of the resistance on the stain of the guage will change.
Based on the results of the measurement of ultrasonic sensor using the two samples can be inferred to have errors (% error) of 0.045. As for the weight of the sensor using the two samples can be inferred to have errors (% error) of 0.110 after 20 times of measurement.
BAB I PENDAHULUAN
1.1. Latar Belakang
Pengukuran merupakan suatu bagian yang tak terpisahkan dalam
kegiatan evaluasi. Pengukuran merupakan suatu proses untuk memperoleh
data. Data hasil pengukuran merupakan data objektif, yang dapat dijadikan
dasar melakukan penilaian. Dengan melakukan pengukuran ini kita dapat
mengambil beberapa manfaat.
Dalam hal pengukuran berat dan tinggi badan, biasanya
dilakukan secara manual yaitu dengan menggunakan timbangan atau
pengukur berat badan konvensional. Definisi timbangan itu sendiri adalah
sebuah alat bantu yang digunakan untuk mengetahui berat suatu benda.
Sedangkan definisi alat ukur tinggi badan merupakan sebuah alat bantu
yang digunakan untuk mendapatkan data ukuran tubuh dalam sisi
tingginya yang di ukur dalam keadaan murni tinggi badan dari tumit
hingga ujung kepala tanpa perlengkapan apapun. Berat badan di ukur
dalam satuan kilogram (kg) dan tinggi badan di ukur dalam satuan
centimeter (cm).
Sebelum abad ke-20, pola hidup seperti kegemukan jarang di
temui, tetapi pada 1997 WHO secara resmi menyatakan kegemukan
sebagai epidemik global. Hingga 2005 , WHOmemperkirakan setidaknya
banyak wanita dibandingkan pria. Dahulu, kegemukan dianggap sebagai
masalah negara-negara berpenghasilan tinggi, namun saat ini angka
kegemukan meningkat di seluruh dunia, baik di negara maju maupun
negara berkembang. Kurus juga merupakan salah satu penyebab tubuh
tidak menjadi ideal. Kekurangan ini disebabkan sedikitnya sel lemak yang
ada dalam tubuh atau kekurangan kadar lemak yang ada dalam sel-sel
tubuh.
Di era sekarang ini, banyak orang yang mulai meninggalkan
gaya hidup sehat dengan tidak memperdulikan bentuk tubuhnya. Oleh
karenanya untuk mencegah dan menangani masalah tidak tercapainnya
tubuh ideal di masyarakat yang barangkali masih belum mengerti tentang
berat badan ideal, Penulis mencoba untuk memberikan alternatif
penyelesaian masalah dengan cara memberi informasi kepada masyarakat
dalam mengetahui bentuk tubuhnya sendiri. Apabila menggunakan
timbangan konvensional, kita hanya bisa mengetahui berat badansaja.
Begitu pula dengan pengukur tinggi badan yang hanya bisa memberikan
informasi tentang tinggi badan saja.
Bedasarkan permasalahan dan latar belakang di atas, penulis
tertarik untuk mendesain sistem yang dapat mengukur berat dan tinggi
badan yang dapat mengukur indeks massa tubuh secara otomatis yang
1.2. Rumusan Masalah
Bedasarkan permasalahan pada latar belakang di atas, penelitian
ini ditujukan untukmenyelesaikan permasalahan pengukuran indeks massa
tubuh bedasarkan alat ukur tinggi badan dan berat badan digital yang
saling terintegrasi.
1.3. Batasan Masalah
Agar tidak terjadi kerancuan dan pelebaran permasalahan dalam
penyusunan tugas akhir, penulismembatasi pokok permasalahan yang
sifatnya praktis, yaitu :
1. Membangun rancangan bentuk fisik penghitung berat dan tinggi badan.
2. Membangun sistem penghitung indeks massa tubuh.
3. Range pengukuran berat badan 30 Kg – 90 Kg.
4. Range pengukuran tinggi badan 100 Cm – 190 Cm
1.4. Tujuan
1.4.1. Tujuan umum
Membantu masyarakat ataupun pasien dalam mengetahui
berat dan tinggi badannya, serta menentukan berat badan ideal
1.4.2. Tujuan khusus
Penelitian ini bertujuan untuk membangun alat ukur tinggi
badan dan berat badan digital yang terintegrasi guna memberikan
informasi tentang indeks massa tubuh.
1.5. Manfaat
1.5.1. Manfaat teoritis
Menambah wawasan terlebih kepada penulis sendiri,
tentang pengukuran berat dan tinggi badan.
1.5.2. Manfaat praktis
Rangkaian ini di rancang untuk menyempurnakan alat
pengukur tinggi dan berat badan yang telah ada. Dimana alat ini
lebih efektif dan efesien. Dari segi kemudahan dalam penggunaan
dan ketepatan dalam pembacaan hasil akhir karena menggunakan
BAB II
TINJAUAN PUSTAKA
2.1. Penelitian Terdahulu
Pengukuran indeks massa tubuh adalah salah satu cara dalam
menentukan apakah tubuh dalam kondisi normal atau tidak normal. Pada
penelitian sebelumnya telah dibuat alat pengukur tinggi dan berat badan
yang difungsikan untuk mengetahui berat dan tinggi badan seseorang.
Pada kesempatan kali ini penulis akan mencoba membuat modul dengan
menggunakan pengukuran tinggi dan berat badan guna mengetahui indeks
massa tubuh seseorang.
Afif Muhammad (2015) telah membuat alat pengukur tinggi
dan berat badan digital yang terintegrasi. Prinsip kerjanya menggunakan
sensor ultrasonic sebagai pengukuran tinggi dan load cell sebagai sensor
berat yang berfungsi sebagai pengukuran berat. Kelebihan dari modul ini
adalah suber tegangan yang tidak menggunakan jala2 PLN namun
menggunakan battrey. Kekurangan dari mudul ini adalah belum
disertakannya rumus perhitungan indeks massa tubuh dalam program.
2.2. Berat Badan
Pengukuran massa tubuh merupakan salah satu data dasar
mengenai kondisi tubuh seseorang baik berfungsi sebagai diagnosis medis
kesehatan, massa tubuh dapat dijadikan patokan ukuran ideal (tidak
kekurangan dan kelebihan).
Istilah berat badan digunakan dalam bahasa sehari-hari, dalam
ilmu biologi dan medis untuk merujuk kepada massa atau berat badan
seseorang. Berat badan diukur dalam kilogram, suatu penilaian massa di
seluruh dunia, meskipun di beberapa negara seperti Amerika Serikat itu
diukur dalam pound. Kebanyakan rumah sakit, sekarang menggunakan
kilogram untuk perhitungan berat badan, tetapi menggunakan kilogram
dan pound bersamaan untuk tujuan lainnya. Sebenarnya, berat badan
adalah berat dari seseorang tanpa diikuti dengan suatu apapun, akan tetapi
berat badan hampir selalu diikuti dengan berat pakaian, sepatu dan
aksesoris berat seperti ponsel dan dompet karena pada saat orang
mengukur berat badan mereka sering tidak menanggalkan semua
barang-barang tersebut. Berat badan juga adalah salah satu cara untuk menentukan
kesehatan seseorang.
Berat badan seseorang dapat dipengaruhi oleh beberapa faktor,
salah satunya adalah pisikologi atau mental. Penyakit mental atau
pisikologis seperti bulemia adalah kelainan cara makan dimana seseorang
makan secara terus berlebihan secara berulang-ulang dan kemuadian
kembali mengeluarkannya. Mengeluarkan makanan yang dimakan ini bisa
melalui muntah yang biasanya diinduksi dengan obat pencahar, selain itu
diuretik. Selain makan berlebih, penderita bulemia juga cendrung diet
sangat ketat dan juga olah raga berlebihan.
Bulimia selalu berhubungan dengan kontrol diet ataupun
penurunan berat badan. Penderita bulimia biasanya terlalu memperhatikan
berat badan, selalu merasa kurang percaya diri dengan berat badan
sehingga cenderung melakukan diet berlebih.Bulimia merupakan salah
satu kelainan mental, penyebab bulimia belum diketahui secara biologis.
2.2.1. Kegemukan/obesitas
Obesitas telah didefinisikan sebagai berat badan minimal
20% di atas berat sesuai dengan tingkat kematian terendah untuk
individu dari ketinggian tertentu, jenis kelamin, dan usia (berat
badan ideal). 20% - 40% lebih dari berat badan ideal dianggap
ringan obesitas; 40-100% dari berat badan ideal dianggap cukup
obesitas; dan 100% lebih dari berat badan ideal dianggap parah,
atau obesitas. Pedoman baru-baru ini lebih untuk obesitas
menggunakan pengukuran yang disebut Body Mass Index (BMI).
BMI lebih dari 30% dianggap obesitas. Pengukuran dan
perbandingan pinggang dan lingkar pinggul juga dapat memberikan
beberapa informasi mengenai faktor risiko yang terkait dengan
berat badan. Semakin tinggi rasio, semakin besar kesempatan untuk
ketebalan kulit kali lipat untuk menentukan apakah jaringan adalah
otot atau jaringan lemak.
Banyak perhatian telah dihasilkan tentang meningkatnya
angka kejadian obesitas di kalangan orang Amerika. Beberapa studi
telah mencatat peningkatan dari 12% menjadi 18% yang terjadi
antara 1991 dan 1998. Penelitian lain justru memperkirakan bahwa
lebih dari 50% orang Amerika kelebihan berat badan.
2.2.2. Kurus
Kurus atau berat badan kurang umumnya lebih
disebabkan oleh kurangnya kalori protein, namun bisa juga
disebabkan oleh penyakit tertentu seperti hepatitis, trauma, luka
bakar, bulimia anoreksia dan cacingan. Dalam kasus pertama yang
perlu dilakukan hanyalah mencukupi asupan karbohidrat, lemak
dan protein yang sesuai dengan kebutuhan.Sedangkan dalam kasus
kedua perlu dilakukan peningkatan kebutuhan akan zat gizi, artinya
asupan kebutuhan yang sesuai patokan saja (ditentukan
berdasarkan tinggi badan dan umur) tidak lagi dapat mencukupi,
namun yang lebih penting adalah pemulihan penyakit yang
diderita.
Kondisi lain yang bisa menyebabkan kurus adalah tidak
efisiennya pencernaan seseorang, sehingga walaupun porsi
(baik umur, tinggi badan, aktivitas kerja dan jenis kelamin) namun
badannya tetap saja kurus.Hal seperti ini biasanya disebabkan oleh
faktor keturunan dan gangguan penyerapan atau pencernaan. Untuk
kasus ini makanan atau suplemen yang dapat membantu
pencernaan akan sangat dianjurkan.
Kurangnya nafsu makan juga dapat menyebabkan
penurunan berat badan. Untuk hasil yang terbaik disarankan untuk
menambah porsi makan. Bagi yang sulit untuk makan dalam porsi
banyak sebaiknya menambah frekuensi makan dari 3 kali menjadi
4 atau 5 kali sehari.
Gejala Kurus Atau Berat Badan Kurang :
Kondisi berat badan kurang dari IMT yang cenderung bertahan
lama.
2.2.3. Berat badan ideal
Berat badan ideal adalah bobot optimal dari tubuh untuk
menjaga kesehatan dan kebugaran. Rentang dari berat badan ideal
seseorang dapat diperhitungkan berdasarkan berbagai macam
faktor, di antaranya: ras, jenis kelamin, usia, serta tinggi badan.
Dikenal berbagai macam metode perhitungan berat badan ideal, di
antara yang umum digunakan untuk usia dewasa adalah sebagai
berikut: berat badan ideal berdasarkan indeks massa tubuh
berat badan ideal pada anak dapat dihitung berdasarkan rumus
Leffler dan rumas Theron.
Perhitungan terhadap berat badan ideal memiliki
kegunaan sebagai parameter keadaan kesehatan seseorang. Dengan
mempertahankan berat badan sesuai dengan rentangan berat badan
yang ideal, kita dapat mengoptimalkan kesehatan dan kebugaran
tubuh serta menghindarkan kita dari potensi untuk munculnya
penyakit – penyakit tertentu, terutama penyakit metabolik
seperti diabetes melitus (DM), hipertensi, ataupun juga penyakit
lain yang melibatkan organ jantung dan pembuluh darah. Selain itu,
memperhitungakan berat badan ideal juga berguna untuk
menentukan pola makan dan aktifitas yang sesuai, menentukan
dosis obat yang sesuai, serta mengetahui keadaan pertubuhan
seorang anak, apakah pertumbuhannya sudah optimal atau tidak.
Berat badan ideal diyakini sebagai berat badan maksimal
untuk orang dikatakan sehat, didasarkan terutama pada tinggi
badan tetapi dapat dimodifikasi oleh faktor-faktor lain seperti jenis
kelamin, usia, derajat dan perkembangan otot. Berat badan ideal
atau ideal body weight (IBW) awalnya diperkenalkan oleh dr.
Devine pada tahun 1974 untuk memungkinkan penilaian dosis obat
pada pasien obesitas, peneliti menunjukkan bahwa metabolisme
obat-obatan tertentu lebih berhubungan dengan berat badan ideal
yang menunjukkan angka kematian relatif untuk pria dan wanita
sesuai dengan kombinasi tinggi-berat yang berbeda. Pengukuran
yang paling sering dari IBW adalah dengan menggunakan rumus
Devine. Metode lain yang digunakan dalam memperkirakan berat
badan yang ideal adalah indeks massa tubuh dan metode Hamwi.
a. Rumus Devine
Berat Badan Ideal (Laki-laki) = 50kg + 2.3kg x
(Tinggi(inchi) – 60)
Berat Badan Ideal (Perempuan) = 45.5kg + 2.3kg x
(Tinggi(inchi) – 60)
Rumus ini diaplikasikan untuk orang dengan tinggi lebih
dari 60 inchi (5 kaki). 1 Inchi = 2.54 cm, 1 kaki = 30.48 cm.
Rumus Devine banyak digunakan di internet untuk
membuat kalkulator online untuk menghitung berat badan
ideal seseorang.
b. Rumus Hamwi
Metode Hamwi (juga dikenal sebagai persamaan Hamwi
atau formula Hamwi) digunakan untuk menghitung berat
badan ideal dari orang dewasa.
Pria: [106 + (6×10)], Tambahkan 6 untuk setiap inci jika
tinggi lebih dari 5 kaki.
Wanita: [100 + (5×10)], Tambahkan 5 untuk setiap inci jika
Contoh: Berat badan ideal laki-laki yang tingginya 5 kaki
10 inci [106 + (6×10)] = 166.
2.2.4. Indeks massa tubuh (IMT)
Indeks Massa Tubuh atau Body Mass Index (BMI)
adalah jumlah berat badan ideal yang dihitung dari berat dan tinggi
badan seseorang. BMI merupakan indikator yang cukup handal
untuk kegemukan tubuh bagi kebanyakan orang. BMI tidak
mengukur lemak tubuh secara langsung, namun penelitian telah
menunjukkan bahwa BMI berkorelasi dengan lemak tubuh, seperti
berat air dan dual energy x-ray absorptiometry (Grummer – Strawn
LM, 2002)[8]. IMT dapat dianggap sebagai alternatif untuk
langkah-langkah langsung mengukur lemak tubuh. Selain itu,
metode IMT yang mudah dan murah.
Dalam pengukuran, indeks massa tubuh didapatkan dari
hasil pembagian antara berat badan dan kuadrat tinggi badan dalam
meter (Marekensson, 2004).
Indeks Massa Tubuh = Berat Badan/Tinggi Badan (meter)2[7].
Contoh: Berat Badan = 68 kg, Tinggi = 165 cm (1.65 m)
IMT = 68 / (1.65)2 = 24.98
Untuk orang dewasa berusia 20 tahun dan lebih tua, IMT
ditafsirkan menggunakan kategori status berat badan standar yang
remaja, interpretasi BMI berdasarkan usia dan jenis kelamin
tertentu.
Status Penilaian IMT menurut Kementrian Kesehatan
Republik Indonesia (2003) dikategorikan dalam beberapa
kelompok sebagai berikut :
– Di bawah 18.4 = Berat badan kurang (Underweight)
– 18.5 – 25.0 = Berat badan normal (Normal)
– 25.1 – 27,0 = Berat badan berlebih (Overweight)
– 27.1 lebih = Kegemukan (Obesitas)
2.3. Tinggi Badan
Tinggi tubuh merupakan salah satu faktor antopometri yang
memberikan informasi pertumbuhan tulang seseorang. Selain itu,
merupakan ukuran yang memiliki hubungan massa tubuh terhadap tinggi
tubuh.
Menurut Bary L. Johnson (1979) yang di kutip oleh Murtiantmo
Wibowo Adi, Tinggi badan merupakan ukuran posisi tubuh berdiri
(vertical) dengan kaki menempel pada lantai, posisi kepal dan leher tegak,
pandangan rata-rata air, dada di busungkan, perut datar dan tarik nafas
beberapa saat.
Tinggi badan manusia bergantung pada faktor lingkungan dan
genetik. Tinggi badan manusia beragam menurut pengukuran
darirata-rata) menyebabkan seseorang mengalami
gigantismeatau dwarfisme, bila tak lebih dari variasi tersebut masih bisa
dikatakan normal.
Pertumbuhan rata-rata untuk setiap jenis kelamin dalam populasi
berbeda secara bermakna, di mana pria dewasa rata-rata lebih tinggi
daripada wanita dewasa. Selain itu, tinggi badan manusia juga berbeda
menurut kelompok etnis.
Pertumbuhan tinggi badan biasanya berhenti ketika lempeng
pertumbuhan (lempeng efifisis) di ujung tulang menutup. Penutupan ini
terjadi sekitar usia 16 tahun pada wanita atau 18 tahun pada pria. Tetapi,
kadang-kadang pada sebagian orang, baru menutup pada usia sekitar 20-21
tahun.
2.4. Timbangan Badan Digital
Kemajuan teknologi yang begitu pesat membuat hidup lebih
mudah dan sederhan. Seperti halnya timbangan digital telah jelas memiliki
manfaat yang jauh lebih besar dibandingkan dengan model timbangan
analog.Timbangan badan digital merupakan jenis timbangan yang bekerja
secara elektronis dengan tenaga listrik. Umumnya timbangan ini
menggunakan arus lemah dan indikatornya berupa angka digital pada layar
bacaan.
Manfaat terbesar dari Timbangan badan digital adalah tingkat
timbangan badan digital mulai banyak dipakai di laboratorium dan
tempat-tempat lain.
2.5. Sensor Jarak
Sensor ultrasonic adalah sebuah sensor yang berfungsi untuk
mengubah besaran fisis (bunyi) menjadi besaran listrik dan sebaliknya.
Cara kerja sensor ini didasarkan pada prinsip dari pantulan suatu
gelombang suara sehingga dapat dipakai untuk menafsirkan eksistensi
(jarak) suatu benda dengan frekuensi tertentu. Disebut sebagai sensor
ultrasonic karena sensor ini menggunakan gelombang ultrasonic (bunyi
ultrasonic).
Gelombang ultrasonic adalah gelombang bunyi yang
mempunyai frekuensi sangat tinggi yaitu 20.000 Hz. Bunyi ultrasonic
tidak dapat di dengar oleh telinga manusia. Bunyi ultrasonic dapat
didengar oleh anjing, kucing, kelelawar, dan lumba-lumba. Bunyi
ultrasonic nisa merambat melalui zat padat, cair dan gas. Reflektivitas
bunyi ultrasonic di permukaan zat padat hampir sama dengan reflektivitas
bunyi ultrasonic di permukaan zat cair. Akan tetapi, gelombang bunyi
ultrasonic akan diserap oleh tekstil dan busa.
2.5.1. Cara kerja sensor ultrasonic
Pada sensor ultrasonic, gelombang ultrasonic
piezoelektrikdengan frekuensi tertentu. Piezoelektrik ini akan
menghasilkan gelombang ultrasonic (umumnya berfrekuensi
40kHz) ketika sebuah osilator diterapkan pada benda tersebut.
Secara umum, alat ini akan menembakkan gelombang ultrasonic
menuju suatu area atau suatu target. Setelah gelombang menyentuh
permukaan target, maka target akan memantulkan kembali
gelombang tersebut. Gelombang pantulan dari target akan
ditangkap oleh sensor, kemudian sensor menghitung selisih antara
waktu pengiriman gelombang dan waktu gelombang pantul
diterima.
Gambar 2.1.Cara kerja sensor ultrasonic dengan transmitter dan
Secara detail, cara kerja sensor ultrasonic adalah sebagai berikut:
1. Sinyal dipancarkan oleh pemancar ultrasonic dengan frekuensi
tertentu dan dengan durasi waktu tertentu. Sinyal tersebut
berfrekuensi diatas 20kHz. Untuk mengukur jarak benda
(sensor jarak), frekuensi yang umum digunakan adalah 40kHz.
2. Sinyal yang dipancarkan akan merambat sebagai gelombang
bunyi dengan kecepatan sekitar 340 m/s. Ketika menumbuk
suatu benda, maka sinyal tersebut akan dipantulkan oleh benda
tersebut.
3. Setelah gelombang pantulan sampai di alat penerima, maka
sinyal tersebut akan diproses untuk menghitung jarak benda
tersebut. Jarak benda dihitung berdasarkan rumus :
S = 340. t/2...(2.1)
dimana S merupakan jarak antara sensor ultrasonic dengan
benda (bidang pantul), dan t adalah selisih antara waktu
pemancaran gelombang oleh Transmitter dan waktu ketika
gelombang pantul diterima receiver.
2.5.2. Rangkaian sensor ultrasonic
Piezoelektrik
Piezoelektrik berfungsi untuk mengubah energi listrik
menjadi energi mekanik. Bahan piezoelektrik adalah material yang
mekanis. Sebaliknya, jika medan listrik diterapkan, maka material
tersebut akan mengalami regangan atau tekanan mekanis. Jika
rangkaian pengukur beroperasi pada mode pulsa elemen
piezoelektrik yang sama, maka dapat digunakan sebagai transmitter
dan reiceiver. Frekuensi yang ditimbulkan tergantung pada
osilatornya yang disesuiakan frekuensi kerja dari masing-masing
transduser. Karena kelebihannya inilah maka tranduser
piezoelektrik lebih sesuai digunakan untuk sensor ultrasonic.
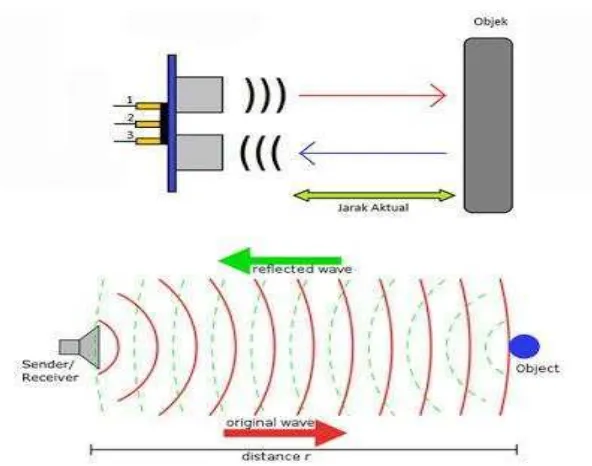
Transmitter
Transmitter adalah sebuah alat yang berfungsi sebagai
pemancar gelombang ultrasonic dengan frekuensi tertentu (misal,
sebesar 40 kHz) yang dibangkitkan dari sebuah osilator. Untuk
menghasilkan frekuensi 40 KHz, harus di buat sebuah rangkaian
osilator dan keluaran dari osilator dilanjutkan menuju penguat
sinyal. Besarnya frekuensi ditentukan oleh komponen RLC / kristal
tergantung dari disain osilator yang digunakan. Penguat sinyal akan
memberikan sebuah sinyal listrik yang diumpankan ke
piezoelektrik dan terjadi reaksi mekanik sehingga bergetar dan
memancarkan gelombang yang sesuai dengan besar frekuensi pada
Gambar 2.2. Rangkaian dasar dari transmitterultrasonic
Receiver
Receiver terdiri dari transduser ultrasonic menggunakan
bahan piezoelektrik, yang berfungsi sebagai penerima gelombang
pantulan yang berasal dari transmitter yang dikenakan pada
permukaan suatu benda atau gelombang langsung LOS (Line
ofSight) dari transmitter. Oleh karena bahan piezoelektrik memiliki
reaksi yang reversible, elemen keramik akan membangkitkan
tegangan listrik pada saat gelombang datang dengan frekuensi yang
resonan dan akan menggetarkan bahan piezoelektrik tersebut.
2.5.3. Sensor ultrasonic HC-SR04
Sensor ini merupakan sensor ultrasonic siap pakai, satu
alat yang berfungsi sebagai pengirim, penerima, dan pengontrol
gelombang ultrasonic. Alat ini bisa digunakan untuk mengukur
jarak benda dari 2cm - 4m dengan akurasi 3mm. Alat ini memiliki
4 pin, pin Vcc, Gnd, Trigger dan Echo[11]. Pin Vcc untuk listrik
positif dan Gnd untuk ground-nya. Pin Trigger untuk Trigger
keluarnya sinyal dari sensor dan pin Echo untuk menangkap sinyal
pantul dari benda.
Gambar 2.4.Sensor ultrasonicHC-SR04
Cara menggunakan alat ini yaitu: ketika kita memberikan
tegangan positif pada pin Trigger selama 10uS, maka sensor akan
mengirimkan 8 step sinyal ultrasonic dengan frekuensi 40kHz.
Selanjutnya, sinyal akan diterima pada pin Echo. Untuk mengukur
jarak benda yang memantulkan sinyal tersebut, maka selisih waktu
menentukan jarak benda tersebut. Rumus untuk menghitungnya
sudah saya sampaikan di atas.
2.6. Sensor Berat
Load cellmerupakan komponen utama pada sistem timbangan
digital. Bahkan tingkat ke-akurasian suatu timbangan digital tergantung
dari jenis dan tipe load cell yang dipakai.Setiap timbangan harus lulus
legalisasi oleh badan Direktorat Metrologi, yaitu suatu badan yang
berwenang untuk melegalisasikan atau men-sahkan timbangan melalui
sistem TERA. Setiap timbangan diharuskan melakukan TERA maksimal
satu tahun sekali, karena semua timbangan dalam proses pemakaiannya
pada jangka waktu tertentu akan mengalami deformasi mekanis pada
frame timbangan, ini akan berpengaruh terhadap tingkat ke-akurasian
dari loadcell pada timbangan.
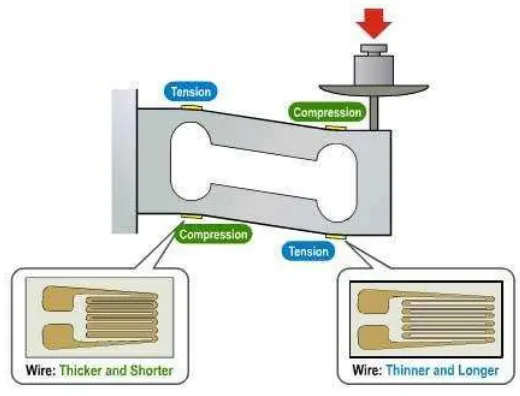
Load cell merupakan sensor berat, apabila load cell diberi beban
pada inti besinya maka nilai resitansi di Strain gaugeakan berubah.
Umumnya load cell terdiri dari 4 buah kabel, dimana dua kabel sebagai
eksitasi dan dua kabel lainnya sebagai sinyal keluaran.
Load cell adalah alat electromekanik yang biasa disebut Transducer, yaitu
gaya yang bekerja berdasarkan prinsip deformasi sebuah material akibat
adanya tegangan mekanis yang bekerja, kemudian merubah gaya mekanik
menjadi sinyal listrik. Untuk menentukan tegangan mekanis didasarkan
mekanis dan deformasi yang diakibatkan disebut regangan. Regangan ini
terjadi pada lapisan kulit dari material sehingga menungkinkan untuk
diukur menggaunakan sensor regangan atau strain gauge.
Selama proses penimbangan, beban yang diberikan
mengakibatkan reaksi terhadap elemen logam pada load cell yang
mengakibatkan perubahan bentuk secara elastis. Gaya yang ditimbulkan
oleh regangan ini (positif dan negatif) di conversikan kedalam sinyal
listrik oleh strain gauge(pengukur regangan) yang terpasang pada spring
element. Load cell yang paling sederhana adalah load cell yang terdiri dari
bending beam dan strain gauge. Sering kali komponen tersebut dilengkapi
dengan elemen tambahan (housing, sealing, dll) untuk melindungi elemen
strain gauge.
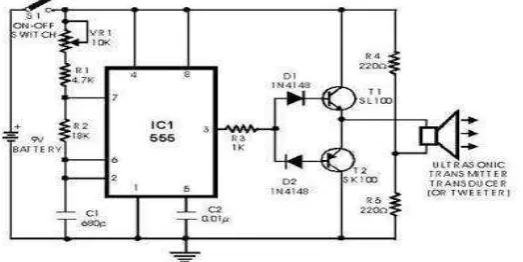
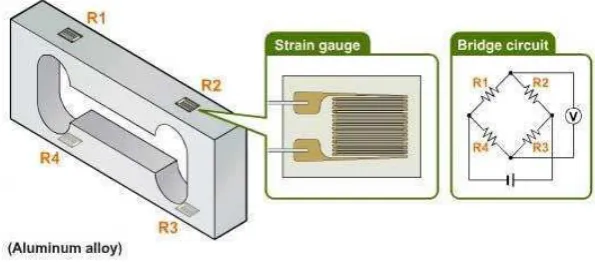
Gambar 2.5.Strain gauge
Strain Gaugemerupakan konduktor yang diatur dalam pola zigzag pada
permukaan sebuah membrane. Ketika membrane tersebut meregang, maka
resistansinya akan meningkat.
Strain gauge merupakan sensor yang digunakan untuk
strain gauge ini banyak diaplikasikan pada jembatan timbang mobil/truk
atau alat ukur berat dalam skala besar. Sensor strain gaugeadalah grid
metal foil tipis yang dilekatkan pada permukaan dari Load cell. Apabila
Load cell di beri beban, maka terjadi strain dan kemudian ditransmisikan
ke foil grid. Tahanan foil grid berubah sebanding dengan strain induksi
beban.
Sensor strain gauge pada umumnya adalah tipe metal foil,
dimana konfigurasi grid dibentuk oleh proses photoeching. Karena
prosesnya sederhana, maka dapat dibuat bermacam-macam ukuran gauge
dan bentuk grid. Untuk macam gauge terpendek yang tersedia adalah
0.20mm, dan yang terpanjang 102 mm. Tahanan gauge standar adalah 120
mm dan 350Ω, bahkan untuk keperluan khusus gauge ada juga yang
tersedia dengan tahanan 500Ω, 1000Ω dan 10kΩ.
Load cell memiliki bermacam-macam caracteristik yang bisa
diukur, tergantung pada jenis logam yang dipakai, bentuk load cell, dan
ketahanan dari lingkungan sekitar.
Untuk memilih Load cell yang sesuai dengan kebutuhan anda, penting
untuk mengetahui definisi dari parameter berikut :
Calibration : membandingkan output (signal)Load cell dengan standar
Combined Error : Penyimpangan maksimum, jika ditarik garis lurus
diukur pada saat tanpa beban sampai ketika diberikan beban maksimal dan
sebaliknya saat beban maksimal sampai pada keadaan tanpa beban.
Pengkuran dinyatakan dalam persen terhadap kapasitas maksimal. Biasa
disebut juga Non-linearity dan hysteresis.
CREEP : Perubahan sinyal keluaran Load cell selama pembebanan tidak
berubah, dan tidak ada perubahan lingkungan sekitar.
CREEP RECOVERY : Perubahan pengukuran kondisi tanpa beban, setelah
beberapa waktu diberikan beban dan kemudian beban dihilangkan.
DRIFT : Perubahan nilai pengukuran saat diberikan beban konstan
ECCENTRIC LOAD : Pembebanan pada area timbangan tapi tidak tepat di
titik antar load cell
ERROR : Perbedaan pengukuran dengan beban yang sesungguhnya.
EXCITATION : Tegangan input yang diberikan agar Load cell bekerja.
Pada umumnya Load cell membutuhkan tegangan excitation 10VDC,
tetapi ada juga yang memerlukan 15VDC, 20VDC, dan 25VDC dan ada
HYSTERESIS : Penyimpangan maksimum hasil pengukuran dengan beban
yang sama. Satu pengukuran dari nol sampai maksimum, pengukuran yang
lain dari maksimum sampai nol. Pengukuran histerisis dinyatakan dalam
persen terhadap kapasitas maksimum (%FS). Biasanya Histerisis selalu
bernilai 0.02%FS, 0.03%FS dan 0.05%FS
INPUT BRIDGE RESISTANCE : Resistansi Input daripada Load cell.
Diukur dengan Ohm meter antara dua titik input atau Excitasi. Biasanya
selalu lebih besar dari resistansi Output/sinyal karena adanya resistor
kompensasi pada jalur Excitasi.
INSULATION RESISTANCE : Pengukuran resistansi antara sirkuit Load
cell dengan strukturnya. Pengukuran dilakukan dengan tegangan DC.
NON-LINEARITY : Penyimpangan maksimum pada grafik hasil kalibrasi
terhadap garis lurus (Ideal) antara tanpa beban dan beban penuh.
Dinyatakan dengan persentase terhadap pengukuran pada kapasitas
maksimum, hanya diukur dari nol sampai maksimum. Umumnya
Non-linearity sebesar 0.025FS dan 0.035FS.
OUTPUT : Sinyal yang dihasilkan oleh load cell dimana output
berbanding lurus dengan eksitasi dan beban yang diterapkan. Sinyal
outputload cell dalam satuan mV/V atau V/A
OUTPUT BRIDGE RESISTANCE : Hambatan keluaran dari Cell. Output
Bridge Resistance adalah 350O, 480O, 700O, 750O dan 1000O.
OUTPUT RATE : Tngkat perbandingan antara output tanpa beban dengan
REAPITIBILITY : Selisih bacaan output maksimum Load cell untuk beban
yang sama dan waktu yang identik.
RESOLUTION : Perubahan terkecil di input mekanis yang menghasilkan
perubahan yang terdeteksi dalam sinyal output
SAFE OVERLOAD RATING : Beban maksimum (%) kapasitas beban,
yang dapat diterapkan tanpa menghasilkan pergeseran permanen dalam
karakteristik kinerja luar yang spesifik.
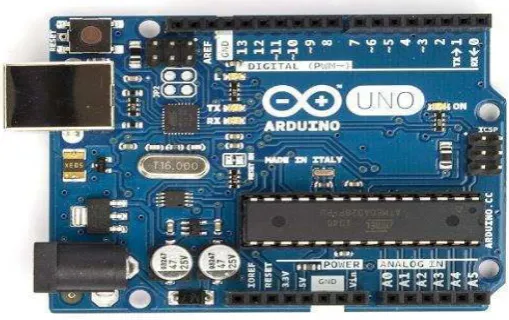
2.7. Arduino uno
Arduino unoadalah papan sirkuit berbasis Microcontroller
ATmega328 yang fleksibel dan open-source, perangkat keras dan
lunaknya mudah digunakan. IC (integrated circuit) ini memiliki 14
input/output digital (6 output untuk PWM), 6 analog input, resonator
kristal keramik 16 MHz, Koneksi USB, soket adaptor, pin header ICSP,
dan tombol reset.
Uno berbeda dari semua board microcontroller diawal-awal
yang tidak menggunakan chip khusus driver FTDI USB-to-serial. Sebagai
penggantinya penerapan USB-to-serial adalah ATmega16U2 versi R2
(versi sebelumnya ATmega8U2). Versi Arduino uno Rev.2 dilengkapi
resistor ke 8U2 ke garis ground yang lebih mudah diberikan ke mode
DFU.
2.7.1. Keunggulan board arduino uno revision 3
1. 1.0 pinout: ditambahkan pin SDA dan SCL di dekat pin AREF
dan dua pin lainnya diletakkan dekat tombol RESET, fungsi
IOREF melindungi kelebihan tegangan pada papan rangkaian.
Keunggulan perlindungan ini akan kompatibel juga dengan
dua jenis board yang menggunakan jenis AVR yang beroperasi
pada tegangan kerja 5V dan Arduino Due tegangan operasi
3.3V
2. Rangkaian RESET yang lebih mantap.
3. Penerapan ATmega 16U2 pengganti 8U2.
Bahasa "UNO" berasal dari bahasa Italia yang artinya
SATU, ditandai dengan peluncuran pertama Arduino 1.0, Uno pada
versi 1.0 sebagai referensi untuk Arduino yang selanjutnya, seri
Uno versi terbaru dilengkapi USB. Untuk melihat versi sebelumnya
Tabel 2.1 Spesifikasi arduino uno
EEPROM 1 KB (ATmega328)
Clock Speed 16 MHz
Length 68.6 mm
Width 53.4 mm
Weight 25 g
Note: Referensi desain Arduino dapat digunakan ATmega8, 168,
atau 328, model disini yang tertera menggunakan ATmega328
tetapi versi ATmega8 hanya sebagai referensi saja.
2.7.2. Power
Arduino uno dapat disupply langsung ke USB atau
berfungsi tanpa saklar.Kabel external (non-USB) seperti
menggunakan adaptor AC ke DC atau baterai dengan konektor
plug ukuran 2,1mm polaritas positif di tengah ke jack power di
board. Jika menggunak baterai dapat disematkan pada pin GND
dan Vin di bagian Power konektor
Papan Arduinodapat disupplai tegangan kerja antara 6
sampai 20 volt, jika catu daya di bawah tengan standart 5V board
akan tidak stabil, jika dipaksakan ke tegangan regulator 12 Volt
mungkin board arduino cepat panas (overheat) dan merusak board.
Sangat direkomendasikan tegangannya 7-12 volt.
2.7.3. Penjelasan power PIN:
1. VIN - Input voltase board saat anda menggunakan sumber catu daya luar (adaptor USB 5 Volt atau adaptor yang lainnya
7-12 volt), Anda bisa menghubungkannya dengan pin VIN
ini atau langsung ke jack power 5V. DC power jack (7-12V),
Kabel konektor USB (5V) atau catu daya lainnya (7-12V).
Menghubungkan secara langsung power supply luar (7-12V)
ke pin 5V atau pin 3.3V dapat merusak rangkaian Arduino
ini.
2. 3V3 - Pin tegangan 3.3 volt catu daya umum langsung ke board. Maksimal arus yang diperbolehkan adalah 50 mA.
4. IOREF - Pin ini penyedia referensi tengangan agar mikrokontrol beroperasi dengan baik. Memilih sumber daya
yang tepat atau mengaktifkan penerjemah tegangan pada
output untuk bekerja dengan 5V atau 3.3V.
2.7.4. Memory
ATmega328 memiliki memory 32 KB (dengan 0.5 KB
digunakan sebagai bootloader). Memori 2 KB SRAM dan 1 KB
EEPROM (yang dapat baca tulis dengan libari EEPROM).
2.7.5. InputdanOutput
Masing-masing dari 14 pin UNO dapat digunakan
sebagai input atau output, menggunakan perintah fungsi pinMode(),
digitalWrite(), dan digitalRead() yang menggunakan tegangan
operasi 5 volt. Tiap pin dapat menerima arus maksimal hingga
40mA dan resistor internal pull-up antara 20-50kohm, beberapa pin
memiliki fungsi kekhususan antara lain:
1. Serial: 0 (RX) dan 1 (TX). Sebagai penerima (RX) dan
pemancar (TX) TTL serial data. Pin ini terkoneksi untuk pin
korespondensi chip ATmega8U2 USB-toTTL Serial.
2. External Interrupts: 2 dan 3. Pin ini berfungsi sebagai
konfigurasi Trigger saat interupsi value low, naik, dan tepi,
3. PWM: 3, 5, 6, 9, 10, dan 11. Melayani output 8-bit PWM
dengan fungsi analogWrite().
4. SPI: 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK). Pin yang
support komunikasi SPI menggunakan SPI library.
5. LED: 13. Terdapat LED indikator bawaan (built-in)
dihubungkan ke digital pin 13, ketika nilai value HIGH led
akan ON, saat value LOW led akan OFF.
6. Uno memiliki 6 analog input tertulis di label A0 hingga A5,
masing-masingnya memberikan 10 bit resolusi (1024).
Secara asal input analog tersebut terukuru dari 0 (ground)
sampai 5 volt, itupun memungkinkan perubahan teratas dari
jarak yang digunakan oleh pin AREF dengan fungsi
analogReference().
Sebagai tambahan, beberapa pin ini juga memeliki kekhususan
fungsi antara lain:
1. TWI: pin A4 atau pin SDA dan and A5 atau pin SCL. Support
TWI communication menggunakan Wire library. Inilah pin
sepasang lainnya di board UNO:
2. AREF : Tegangan referensi untuk input analog. digunakan
fungsi analog Reference().
3. Reset :. Meneka jalur LOW untuk mereset Microcontroler, terdapat tambahan tombol reset untuk melindungi salah satu
2.7.6. Communication
Arduino uno memiliki fasilitas nomer untuk komunikasi
dengan komputer atau hardware Arduino lainya, atau dengan
Microcontroler. Pada ATmega328 menerjemahkan serial
komunikasi UART TTL (5V) pada pin 0 (RX) dan 1 (TX). Pada
ATmega16U2 serial komunikasinya dengan USB dan port
virtual pada software di komputer. Perangkat lunak (firmware)
16U2 menggunakan driver standart USB COM dan tidak
membutuhkan driver luar lainnya. SoftwareArduino bawaan telah
menyertakan serial monitor yang sangat mudah membaca dan
mengirim data dari dan ke Arduino. LED indikator TX dan RX
akan kedip ketika data telah terkirim via koneksi USB-to-serial
dengan USB pada komputer (tetapi tidak pada serial com di pin 0
dan pin 1).Software Serial library membolehkan banyak pin serial
communication pada uno. ATmega328 juga support I2C (TWI) dan
SPI communication. SoftwareArduino terbenam di dalamnya Wire
library untuk memudahkan penggunaan bus I2C.
2.7.7. Program
Arduino uno dapat di program dengan
softwareArduinopilih "Arduino uno dari Tools > Board menu
(akan terlacak microcontroller pada board). Microcontroller
bootloaderyang dapat anda upload kode baru tanpa menggunakan
programmer perangkat lainnya. Komunikasi menggunakan
protokol original STK500. Anda dapat pula langsung bootloader
dan program pada microcontroller melalui ICSP (In-Circuit Serial
Programming) menggunakan Arduino ISP atau yang semisalnya.
Pada ATmega16U2 (atau 8U2 di rev1 dan rev2 board)
dapat melihat firmware source code. Pada ATmega16U2/8U2
load-nya dengan DFU bootloader, yang dapat diaktifkan di antaranya:
1. On Rev1 boards: menyambung jumper solder di balik board dan
kemudian mereset 8U2.
2. On Rev2 or later boards: Resistor suntikan pada 8U2/16U2 HWB ke jalur ground, hal ini dapat membuat mudah masuk ke
mode DFU.
2.7.8. Automatic (software) reset
Agak dibutuhkan tekan tombol reset sebelum upload,
sebab Arduino uno dirancang reset dulu oleh software ketika
terhubung dengan komputer. Satu komponen jalur kontrol aliran
(DTR) dari ATmega8U2/ 16U2 yang terhubung di reset seperti
halnya ATmega328 dengan 100 nanofarad kapasitor. Software
upload kode ini dapat mengupload secara mudah tanpa kehilangan
2.7.9. USBovercurrentprotection
Arduino uno memiliki fungsi resettable polyfuse untuk
memproteksi dari port USB komputer akibat hubung singkat atau
kelebihan arus. Jika arus yang melebihi 500mA dari port USB
maka fuse secara otomatis putus koneksi hingga short atau
overload dilepaskan dari board ini.
2.8. LCD (Liquid Crystal Desplay)
Layar LCD merupakan media untuk menampilan data yang
sangat efektif dan efisien dalam penggunaannya. Di alat ukur tinggi dan
berat badan ini LCDdigunakan untuk menampilkan hasil akhir dari
penghitungan tinggi, derat dan indek massa tubuh.LCD yang digunakan
yaitu LCDcaracter 2x16. Berikut merupakan gambar dari LCD 2 x 16.
Gambar 2.8.LCD
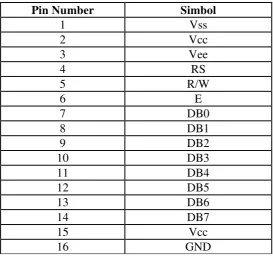
Beberapa pin yang penting pada LCD Character adalah sebagai
berikut :
RS : Register Select
RS = 0; untuk menulis ke register instruksi
R/W: Read/ write
Untuk lebih jelasnya dalam memahaminya, di bawah ini adalah keterangan
pin LCD 2 x 16 Caracter:
Tabel 2.3. Fungsi pin pada LCDCaracter
B
ni adalah tabel keterangan fungsi set:
Tabel 2.4.Function Set
RS R/W D7 D6 D5 D4 D3 D2 D1 D0
0 0 0 0 1 DL N F X X
DL : Set data lengh. Bit ini digunakan untuk mengatur apakah interface jalur data antara microcontroler dengan LCDCaracter adalah 4 bit atau
8 bit
DL = 0; Data lengh4 bit
DL = 1;Data lengh 8 bit
Nama Signal Fungsi
DB0 – DB7 Untuk mengirimkan data caracter atau dan instruksi
E Enable- Signal start untuk mulai pengiriman data atau instruksi
R/W
Signal yang digunakan untuk memilih mode baca atau tulis „0‟ : write
„1‟ : tulis
RS
Register Select
“0”: Instruction register (Write) “1”: Data register (Write, Read)
Vee Tegangan Pengaturan kontras pada LCD
Vcc Tegangan Vcc
N : Set jumlah baris. Bit ini dugunakan untuk setting jumlah baris yang akan digunakan pada LCDcaracter, satu baris atau dua baris.
N = 0; Satu baris display
Untuk lebih jelasnya perhatikan tabel 2.5.
Tabel 2.5. Entry Mode Set
I/D : Set increment atau decrement I/D = 0; Decrement RAM
I/D = 1; Increment RAM
S = Menggeser display ke kanan atau ke kiri S = 0; display tidak bergeser
S = 1; display bergeser kekanan atau kekiri bergantung I/D
Dalam memahami display on-off / kursor lihatlah tabel di bawah ini:
Tabel 2.6.Display ON-OFF/ Kursor
RS R/W D7 D6 D5 D4 D3 D2 D1 D0
0 0 0 0 0 0 1 D C B
RS R/W D7 D6 D5 D4 D3 D2 D1 D0
D : Set displayON/ OFF. Bit ini untuk mengatur apakah displayLCD di hidukan atau dipadamkan.
D = 0: Display OFF
D = 1; Display ON
C : Set displaycursor ON/ OFF. Bit ini untuk menampilkan atau tidak, kursor pada LCDcaracter. untuk menandai caracter yang tercetak pada
layar seperti halnya pada monitor komputer.
C = 0; Cursor OFF
C = 1; Cursor ON
B :Set cursor berkedik ( BLINK ). Bit ini dapat digunakan untuk mengatur cursor pada LCDcaracter apakah berkedip atau tidak.
B = 0; Cursor tidak berkedip
B = 1; Cursor berkedip
Untuk mengetahui lebih jelas masalah display clear perhatikan tabel
dibawah ini:
Tabel 2.7.Display Clear
RS R/W D7 D6 D5 D4 D3 D2 D1 D0
0 0 0 0 0 0 0 0 0 1
Instruksi ini difungsikan untuk membersihkan layar LCD karakter.
Perhatikan juga tabel dibawah ini:
Tabel 2.8.Sift Right atau Left
RS R/W D7 D6 D5 D4 D3 D2 D1 D0
0 0 0 0 0 1 S/C R/L X X
S/C = 0; menggeser cursor
S/C = 1; menggeser display
R/L : Untuk menggeser ke kiri atau kekanan R/L = 0; menggeser ke kiri (Left)
R/L = 1; menggeser ke kanan (Right)
Untuk memahami lebih jelas dalam pemilihan lokasi RAM
LCDcaracter maka terlebih dahulu perhatikan tabel di bawah ini:
Tabel 2.9. Pemilihan Lokasi RAM LCDCharacter
Y
= Pemilihan lokasi RAM baris 1 atau 2
Y= 0:pemilihan lokasi RAM LCD pada baris 1
Y= 1: pemilihan lokasi RAM LCD pada baris 2
XXXX = pemilihan alamat dari address 0000 s/d 1111 atau 0 s/d 15
desimal, karena jumlah caracter yang dapat dimunculkan pada layar
LCDcaracter adalah 16 Caracter.
RS R/W D7 D6 D5 D4 D3 D2 D1 D0
BAB III
METODE PENELITIAN
3.1. Keseluruhan Alat dan Bahan 1. Sensor berat (Load cell)
2. Sensor jarak (HC-SR04)
3. Arduino
4. LCD16x2
5. Capasitor
6. Resistor
3.2. Perakitan Rangkaian 3.8.1. Alat
1. Papan PCB
2. Solder
3. Timah
4. Penyedot Timah
5. Larutan Fericloride
3.8.2. Bahan
1. Travo CT 2 A
2. T-Blok
3. Dioda bridge 2A
5. Capasitor non polar 104
6. Resistor
7. LED
8. Transistor TIP
9. IC regulator 7805
3.3. Variable Penelitian 3.3.1. Variabel bebas
Sebagai variable bebas adalah tinggi dan berat badan
seseorang.
3.3.2. Variabel tergantung
Sebagai variabel tergantung pada modul ini adalah indeks
massa tubuh.
3.4. Definisi Operasional
Dalam kegiatan operasionalnya, variabel-variabel yang
digunakan dalam perencanaan modul ini, baik variabel bebas, variabel
tergantung dan juga variabel terkendali memiliki fungsinya
masing-masing, antara lain :
1. Indeks massa tubuh digunakan sebagai objek untuk dilakukan
pengukuran.
2. Microcontrller yang digunakan sebagai kontrol adalah Arduino
3. Sensor ultrasonic dan sensor berat digunakan sebagaialat ukur
dalam proses pengukuran.
3.5. Diagram Blok Modul
Gambar 3.1 Blok Diagram
Cara kerja blok diagram
Sumber listrik masuk yang nantinya akan mensuplay tegangan
ke seuruh rangkaian. Setelah itu akan menghidupkan arduino yang akan
mengaktifkan sensor load cell dan ultrasonic. Sensor berat akan membaca
berapa beban yang diukur, output dari load cell sangat kecil sehingga
output dimasukkan ke penguat sinyal lalu diteruskan ke microcontroller.
Data output yang masih berupa tegangan analog akan di ubah menjadi
digital menggunakan ADC.
Sensor ultrasonic yang berada di atas akan mengukur dengan
3.6. Diagram Alir Modul
Yes
No
Yes
No Yes
Yes
Gambar 3.2. Flowchart Modul Pengukuran Tinggi
Pengukuran Berat
if ( IMT< 18.5 lcd.print(" Low Weight ");
if ( IMT >= 18.5
&& IMT<25 ) lcd.print(" Normal ");
if ( IMT >= 25 ) lcd.print(" Over Weight ");
Restart Start
Penjelasan diagram alir 1. Mulai
Untuk memulai program
2. Inisialisasi LCD
Sebelum mengerjakan program, microcontroler melakukan persiapan
ke LCD
3. Sensor Ultrasonic On
Sensor ultrasonic akan mengukur tinggi objek yang akan di ukur.
4. Sensor Load cell On
Sensor load cell akan mengukur berat objek yang di ukur.
5. Pengukuran
Microcontroler akan melakukan perhitungan untuk mengidentifikasi
berat ideal objek.
6. Selesai
3.7. Diagram Mekanis
Sensor Jarak
Microcontroller
Loadcell
3.8. Langkah Perkitan
3.8.1. Langkah perakitan power supply
1. Membuat rangkaian skematik power supply 5 volt di aplikasi
proteus. Gambar di bawah ini adalah rangkaian skematik
power supply 5 volt.
Gambar 3.4.scematic power supply
2. Setelah rangkaian skematik jadi, tahap selanjutnya adalah
membuat lay out dan di sablon ke papan pcb. Untuk gambar
lay out power supply 5 volt papan pcb dapat di lihat pada
gambar 3.5 di bawah ini.
3. Rakit komponen yang di butuhkan dengan menggunakan
solder dan timah.
3.8.2. Hasil perakitan power supply
Rangkaian power supply berfungsi sebagai supplay
tegangan ke semua rangkaian yang menggunakan tegangan DC.
Yang besarnya 5 volt. Prinsip kerja power supply adalah merubah
tegangan AC menjadi tegangan DC dengan menggunakan
transformator sebagai penurun tegangan dan dioda sebagai
komponen yang berfungsi sebagai penyearah tegangan. Modul
power supply yang penulis buat akan mengubah tegangan AC
menjadi DC sebesar 5VDC dengan menggunakan IC regulator
7805.
3.8.3. Langkah perakitan keseluruhan komponen
1. Membuat rangkaian skematik arduino uno, LCD dan sensor
yang di gunakan di aplokasi proteus. Gambar 3.6 di bawah ini
Gambar 3.6. Scematic rangkaian minimum sistem
3.8.4. Rangkaian keseluruhan
Hasil perakitan seluruh komponen dapat dilihat
pada gambar 3.7.
3.9. Pembuatan Program Modul
Untuk pembuatan program pada modul ini menggunakan
aplikasi arduino. Program dapat di lihat secara umum seperti dibawah ini.
#include <Hx711.h>
unsigned long pulseTime = 0; float B, C, A, BB ;
lcd.print (" Tugas Akhir ");
for(i = 1 ; i < 16 ; i++){ lcd.scrollDisplayLeft(); delay (200);
}
lcd.setCursor (0, 0);
lcd.print (" Muhammad Zaki U "); lcd.setCursor (0, 1);
digitalWrite (initPin, HIGH); delayMicroseconds (10);
digitalWrite (initPin, LOW);
pulseTime = pulseIn (echoPin, HIGH);
BAB IV
METODE PENELITIAN
4.1. Spesifikasi Alat
Alat pengukur tinggi dan berat badan adalah alat yang
digunakan untuk mengetahui indeks massa tubuh. Adapun spesefikasi
modul yang penulis buat adalah sebagai berikut :
Nama Alat : Alat Pengukur Tinggi dan Berat Badan
Tegangan : 220 V
Desplay : LCD 16 x 2
4.2. Gambar Alat
Untuk gambar alat dapat dilihat seperti pada gambar 4.1
dibawah ini:
4.3. Cara Kerja Alat
Ketika alat terhubung ke jala-jala PLN, kemudian switch
ON/OFF di tekan ke posisi On, maka tegangan akan masuk ke power
supply dan meneruskannya ke microcontroller, tegangan dari power
supply juga memberikan tegangan ke sensor.
Pada microcontroller, tegangan yang masuk akan di proses
untuk di keluarkan pada port yang telah ditentukan. Port pada
microcontroller berfungsi sebagai pemberi sinyal pada sensor yang akan
mengukur objek dan menampilkannya pada LCD.LCD menampilkan
ukutan tinggi tubuh, berat tubuh dan indeks massa tubuh objek yang
diukur.
4.4. Langkah Penggunaan Alat
1. Sambungkan alat ke jala-jala PLN.
2. Ubah posisi saklah menjadi On.
3. Objek yang akan di ukur harus berada diantara sensor berat dan sensor
jarak.
4. Alat akan menampilkan tinggi badan dan berat badan objek.
5. Alat akan menampilkan hasil dari indek massa tubuh dan hasilnya.
6. Tekan reset untuk melakukan pengukurn ulang.
4.5. Jenis Penelitian
Jenis penelitian yang digunakan untuk melakukan penelitian ini
menggunakan metode eksperimentalyaitu alat Pengukur Berat dan Tinggi
Badan ini adalah IMT (Indeks Massa Tubuh).
4.6. Pengujian Modul
Proses pengujian modul pengukur tinggi dan berat badan
dilakukan dengan melibatkan tiga orang sebagai objek yang akan di ukur
tinggi dan berat badannya. Ketiga objek melakukan proses pengukuran
dengan menggunakan cara dan teknik yang sama agar tidak ada pengaruh
dalam pengambilan data. Terlebih dahulu masing-masing objek mengukur
tinggi dan berat badannya pada alat pengukur tinggi badan konvensional
dan berat badan konvensional. Selanjutnya objek mengukur tinggi dan
berat badannya menggunakan modul guna pengambilan data hingga dapat
di ketahui apakah modul layak pakai atau tidak.
Spesefikasi alat yang digunakan sebagai pembanding tinggi
badan adalah sebagai berikut :
Merk : GEA
Gambar 4.2. Alat pembanding tinggi badan
Spesefikasi alat yang digunakan sebagai pembanding tinggi badan adalah
sebagai berikut :
Merk : CAMRY
Satuan : KG
Gambar 4.3. Alat pembanding berat badan
Proses percobaan alat dapat di lihat pada tabel-tabel seperti di
4.6.1. Pengukuran modul tinggi badan
Pada proses pengukuran tinggi badan, peneliti mengukur
dengan dan memantau dengan membandingkan modul pengukur
tinggi badan dengan alatukur tinggi badan konvensional. Berikut
peneliti menguraikan dalam bentuk tabel.
Tabel 4.1. Pengukuran tinggi badan
No
Tinggi
badan
(Cm)
Hasil Pengukuran
1 154 153,4 153,4 153,5 153,7 153,4 153,5
2 157 156,7 156,6 156,6 156,7 156,7 156,7
3 168 167,5 167,7 167,8 167,6 167,5 167,5
4 170 169,4 169,4 169,5 169,7 169,5 169,5
5 164 163,7 163,8 163,4 163,5 163,4 163,4
6 161 160,4 160,5 160,5 160,5 160,4 160,5
4.6.2. Pengukuran modul berat badan
Pada proses pengukuran tinggi badan, peneliti mengukur
dengan dan memantau dengan membandingkan modul pengukur
tinggi badan dengan alatukur tinggi badan konvensional. Berikut
Tabel 4.2. Pengukuran berat badan
4.6.3. Pengukuran modul indeks massa tubuh
Pada pengukuran indeks massa tubuh, peneliti
mendapatkan hasil seperti di bawah ini.
Tabel 4.3 Pengukuran indeks massa tubuh
4.6.4. Perbandingan modul
Proses pengukuran dan perbandingan dapat dilihat pada
tabel 4.4 seperti dibawah ini.
Tabel 4.4. Perbandingan modul
No
Tinggi Badan (Cm) Berat badan (Kg)
Konvensional Modul Error Konvensional Modul Error
1. 148 149 0,06 53 53,2 0,03