Seminar Nasional Instrumentasi, Kontrol dan Otomasi
(SNIKO) 2015
Bandung, 10-11 Desember 2015
Prosiding
Diselenggarakan Oleh:
Pusat Teknologi Instrumentasi dan Otomasi ITB
Center for Instrumentation Technology and Automation (CITA)
ITB
Editor:
Tim Seminar Nasional Instrumentasi, Kontrol dan Otomasi (SNIKO) 2015 Penyunting:
Abdullah Nur Aziz, Dr.
Adhitya Sumardi Sunarya, M.Si Agus Muhammad Hatta, Ph.D Ahmad Qurthobi, ST., MT. Ajat Sudrajat, Ir., MT
Anton Irawan, ST., MT,. Dr.-Ing Awang Noor Indra Wardana, Dr.-Ing Bambang Riyanto T, Ir., Dr., Prof Deddy Kurniadi, Dr., Prof.
Emir Mauludi Husni, Ir., M.Sc., Ph.D Endarko, Ph.D
Endra Joellianto, Ph.D Fitria Hidayanti, S.Si., M.Si. Khairurrijal, Dr. Eng., Prof Mitra Djamal, Dr. Ing., Prof
Ni Njoman Manik Susantini, ST, MT Nuryanti, ST, M.Sc
Ruminto Subekti, SST, MT Siti Nurmaini, Ir., MT., Dr., Prof Suprijadi Harjono, M.Eng., Dr Suprijanto, Dr
Sutanto Hadisupadmo, Dr. Tua Tamba A, Ph.D Penerbit:
Pusat Teknologi Instrumentasi dan Otomasi ITB Redaksi:
Pusat Teknologi Instrumentasi dan Otomasi ITB
Alamat : Litbang (ex.PAU) Lt.8 Jl. Ganesa 10 Bandung 40132, Indonesia Tel. +62-22-2514452 Tel / Fax. +62-22-2534285.
Email : [email protected]
Buku ini berisi mengenai makalah yang dipresentasikan pada Seminar Nasional Instrumentasi, Kontrol dan Otomasi (SNIKO) 2015, tanggal 10-11 Desember 2015, Aula Timur – Institut Teknologi Bandung.
Hak Cipta dilindungi Undang-UndangDilarang memperbanyak atau memindahkan sebagian atau seluruh isi buku ini dalam bentuk apa pun, secara elektronis maupun mekanis, termasuk memfotokopi, merekam, atau dengan teknik perekaman lainnya, tanpa izin dari panitia.
Seminar Nasional Instrumentasi, Kontrol dan Otomasi (SNIKO) 2015 Bandung, Indonesia, 10-11 Desember 2015
KATA PENGANTAR
Sungguh merupakan kehormatan bagi kami, Pusat Teknologi Instrumentasi dan Otomasi,
Institut Teknologi Bandung untuk dapat berkumpul bersama Bapak dan Ibu sekalian pada
Seminar Nasional Instrumentasi dan Kontrol (SNIKO) 2015. Seminar nasional ini adalah
kesempatan kita bersama untuk bertemu dan menjalin kerjasama antara para akademisi,
praktisi di industri, serta pimpinan birokrasi dalam mengembangkan penguasaan ilmu
pengetahuan dan teknologi pada bidang instrumentasi, kontrol dan otomasi di Indonesia.
Urgensi kebersamaan dan kerjasama ini makin tinggi, khususnya dalam menghadapi Pasar
Bebas ASEAN 2016. Pasar bebas ini menuntut masyarakat Indonesia untuk mampu
mengembangkan produk yang kompetitif dari segi mutu, harga dan kemudahan produksi, serta
keandalan operasionalnya. Kriteria-kriteria tersebut dapat dicapai dengan pendayagunaan
sistem instrumentasi, kontrol dan otomasi yang tepat, handal serta efisien. Kualitas ini hanya
dapat tercapai melalui kolaborasi, antara pengembangan teknologi instrumentasi, kontrol dan
otomasi terkini yang dikembangkan di Perguruan Tinggi, kesempatan dan dukungan untuk
mengimplementasikannya di dunia Industri, serta dukungan dan perlindungan dalam bentuk
regulasi yang ditetapkan oleh Pemerintah sebagai pemegang kebijakan pengembangan
Industri.
Karena itulah, SNIKO mengusung tema “Tantangan Masyarakat Otomasi, Kontrol dan Industri
(MOKI) dalam Menghadapi Pasar Bebas ASEAN”. Besar harapan kami, bahwa tema ini dapat
menyatukan kita semua, baik dari Perguruan Tinggi, Industri dan Pemerintah untuk
bekerja-sama menghadapi tantangan tersebut.
Kami sungguh berbahagia, bahwa tema tersebut tercerminkan dengan baik melalui para
Pembicara Utama, yang masing-masing membawakan isu pengembangan instrumentasi,
kontrol dan otomasi terkini dan terdepan. Dimulai dari pembahasan tentang data dan informasi
meteorologi, klimatologi dan geofisika yang sangat penting perannya dalam menyusun strategi
perekonomian Indonesia. Hal ini juga didukung olehberbagai terobosan bidang mekatronika dan
robotika sebagai penggerak industri dalam berbagai skala. Industri-industri ini membutuhkan
dukungan energi. Karena itu pulalah, strategi dan implementasi bauran energi disampaikan
dalam seminar ini. Berbagai perkembangan tersebut akan tinggal landas dengan cepat bila
mendapatkan dukungan teknologi optika terkini dalam menghasilkan sistem akuisisi data yang
komprehensif dan berkecepatan tinggi.
SNIKO juga tidak akan terlaksana tanpa dukungan panitia yang telah mencurahkan pikiran dan
tenaganya untuk mensukseskan acara ini. Untuk itu, kami menyampaikan terima kasih dan
penghargaan setinggi-tingginya pada seluruh jajaran panitian SNIKO 2015. Semoga SNIKO
membuka berbagai kerjasama baru, serta memberi kenangan indah dan tidak terlupakan bagi
kita semua.
DAFTAR ISI
INSTRUMENTASI
RANCANG BANGUN SISTEM PERINGATAN SUHU PENGEREMAN BERBASIS MIKROKONTROLLER
ATMEGA 16 ... 1
DESAIN SEPATU BERPIEZOELEKTRIK SEBAGAI SISTEM PEMANEN ENERGI DARI AKTIVITAS
BERJALAN MANUSIA ... 8
IDENTIFIKASI SISTEM TEMPERATUR AIR UMPAN DEAERATOR PADA PEMBANGKIT LISTRIK TENAGA
UAP... 14
KONSEP SATUAN HILANG ENERGI DALAM ALIRAN FLUIDA ... 19
RETROFIT SISTEM PENCAMPURAN 2 FLUIDA BEDA WARNA MENGGUNAKAN MIKROKONTROLER ... 30
PERANCANGAN EARLY WARNING SYSTEM KONDISI CUACA VARIABEL KELEMBABAN LINGKUNGAN
PENCEGAHAN KECELAKAAN TRANSPORTASI KERETA API AKIBAT BANJIR SKALA LABORATORIUM .. 39
STUDI REKONSTRUKSI PERMUKAAN WAJAH SECARA 3-DIMENSI MENGGUNAKAN METODE
PROFILOMETRI FRINJI DIGITAL ... 45
CMOS OSILATOR CINCIN DENGAN KELUARAN QUADRATUR DENGAN PENGENDALIAN FREKUENSI . 53
PENGUKURAN REFLEKSI AKUSTIK BOLA SPHERE MENGGUNAKAN INSTRUMEN QUANTIFIED FISH
FINDER ... 57
RANCANG BANGUN INSTRUMEN AUTONOMOUS PENGUKUR PARAMETER FISIK LAUT ... 61
PERANCANGAN KALKULATOR
BALANCING
BERBASIS ANTARMUKA GRAFIS ... 65
PENGGUNAAN MOTOR BLDC PADA MESIN CNC DENGAN TEKNOLOGI INSTASPIN- MOTION DARI
TEXAS INSTRUMENT ... 72
Seminar Nasional Instrumentasi, Kontrol dan Otomasi (SNIKO) 2015 Bandung, Indonesia, 10-11 Desember 2015
KONTROL
RANCANG BANGUN MODUL KONTROL SIMULATOR REFRIGERASI ADSORPSI BERBASIS ARDUINO
DAN LABVIEW ... 83
IMPLEMENTASI METODE KORELASI SILANG UNTUK DETEKSI FRIKSI STATIS KATUP DI KALANG
KONTROL ... 91
KONTROL NAVIGASI ROBOT BERODA PADA KONTES ROBOT PEMADAM API INDONESIA (KRPAI)
MENGGUNAKAN FUZZY LOGIC ... 100
RANCANG BANGUN PROTOTIPE WAHANA BAWAH AIR TIPE WORKING CLASS ROV (REMOTE
OPERATING VEHICLE) ... 107
PEMODELAN DAN RANCANG BANGUN AUTONOMOUS UNDERWATER VEHICLE DENGAN ENAM
PROPELLER ... 115
PERANCANGAN DAN KONTROL MODE OPERASI TATA UDARA RUANG BEDAH ... 121
RANCANG BANGUN SISTEM KONTROL OTOMASI FERTIGASI PARAMETER SUHU SISTEM AEROPONIK
PADA CAISIM ... 129
IMPLEMENTASI ADAPTIVE NEURO FUZZY INFERENCE SYSTEM UNTUK PREDIKSI PRODUKSI ENERGI
LISTRIK DI PLTA WONOGIRI ... 133
IMPLEMENTASI NEAR FIELD COMMUNICATION (NFC) DAN KARTU RFID SEBAGAI PERANGKAT
MOBILE PRESENSI MAHASISWA ... 140
IDENTIFIKASI SISTEM TURBIN GAS MENGGUNAKAN METODE ANALISIS KORELASI DAN ALGORITMA
REALISASI ... 150
PEMODELAN SISTEM TERDISTRIBUSI MENGGUNAKAN METODE HIRARKI PADA POWER PLANT
PEMBANGKIT LISTRIK TENAGA UAP (PLTU) ... 155
ESTIMASI WAKTU INJEKSI BAHAN BAKAR PADA MESIN 4 LANGKAH DENGAN MENGGUNAKAN ANFIS
... 163
OTOMASI
PERANCANGAN
OPERATOR TRAINING SIMULATOR
(OTS) DAN PENGONTROL PID
MINI PLANT FLOW
MENGGUNAKAN DCS ... 174
‘PHANTOM VIRTUAL’ TOMOGRAFI ELEKTRIK BERBASIS KONSEP RANGKAIAN RESISTOR - II ... 180
OPTIMASI MODEL IDENTIFIKASI BAHAN BAKAR MINYAK MELALUI PEMILIHAN FITUR ... 184
EVALUASI KEANDALAN SISTEM DISTRIBUSI TENAGA LISTRIK DI INDUSTRI PUPUK ... 190
PROSES AUTO VISUAL INSPEKSI PADA ENGINE PISTON DENGAN APLIKASI KAMERA DAN ROBOT
YANG TERINTEGRASI ... 195
PERANCANGAN DAN IMPLEMENTASI HIGH AVAILABILITY CLUSTER WEB SERVER BERBASIS DBRD
DAN HEARTBEAT ... 205
OPERASI VALAS: IDENTIFIKASI NOMINAL DENGAN METODE
CANNY EDGE DETECTION
DAN
TEMPLATE MATCHING
... 212
SISTEM PAKAR PENCEGAHAN EPIDEMI DEMAM BERDARAH DENGUE ... 222
APLIKASI
MOBILE
MENGGUNAKAN
FRAMEWORK PHONEGAP
UNTUK
MONITORING
PERSEDIAAN
BARANG PADA PERUSAHAAN DISTRIBUSI SECARA
REAL
-
TIME
... 229
PENGGUNAAN SCADA DALAM SISTIM DISTRIBUSI TENAGA LISTRIK DI KILANG UNIT II DUMAI ... 237
Seminar Nasional Instrumentasi, Kontrol dan Otomasi (SNIKO) 2015 Bandung, Indonesia, 10-11 Desember 2015
57
Pengukuran Refleksi Akustik Bola Sphere Menggunakan Instrumen Quantified
Fish Finder
1Steven Solikin, 2Henry M. Manik*)
1Program Studi Teknologi Kelautan Program Pascasarjana IPB
2Departemen Ilmu dan Teknologi Kelautan FPIK IPB Kampus IPB Dramaga Bogor
Coresponding author: [email protected]*)
Abstrak
Pengukuran nilai echo akustik dari ikan merupakan metode yang penting dalam pendugaan stok ikan. Data estimasi stok ikan yang tepat atau presisi dapat diperoleh dari akurasi instrumen akustik yang sudah dikalibrasi. Salah satu metode untuk mengkalibrasi instrumen akustik adalah dengan mengukur nilai echo
dari sebuah target standar, yaitu bola sphere. Tingkat akurasi dari instrumen sonar yang dikalibrasi sangat tergantung pada karakteristik akustik dari target (bola
sphere). Pengkalibrasian menggunakan objek bola
sphere ini dilakukan pada instrumen akustik CruzPro PcFF88. Bola sphere yang terbuat dari material tungsten carbide dengan ukuran diameter 3 cm diletakkan pada jarak 1 m di bawah transducer CruzPro menggunakan frekuensi 200 kHz. Hasil yang didapatkan berdasarkan pengukuran langsung menunjukkan bahwa nilai target strength dari bola sphere tersebut adalah sebesar -42.5 dB, sedangkan secara empiris nilai target strength bola
sphere tersebut adalah sebesar -46 dB.
Kata Kunci: akustik; bola sphere; CruzPro PcFF88
1
Pendahuluan
Quantified Echo Sounder (QES) sangat banyak digunakan dalam survei akustik untuk mengestimasi stok ikan. Untuk mendapatkan hasil estimasi yang baik, diperlukan kalibrasi terhadap instrumen yang digunakan.
Pada sekitar tahun 1980-an, Foote[1] bersama
peneliti lain mengembangkan metode kalibrasi menggunakan bola sphere standar (metode kalibrasi sphere). Pada metode ini dilakukan pengamatan pada nilai echo dari sphere tersebut, pengukuran amplitudo, dan mengubahnya menjadi nillai target strength (TS) dari sphere tersebut. Menurut Foote et. al[2], untuk mengkalibrasi suatu
instrumen dengan menggunakan bola sphere ada tiga metode perhitungan yang dapat digunakan, yaitu: (1) sensitivitas on-axis dari keseluruhan
echo-sounding dan sistem yang terintegrasi, (2) fungsi time-varied-gain (TVG) dari penerima (receiver), dan (3) sudut bim dari transducer. Perhitungan komponen elektrik dari komponen sistem juga dapat termasuk dalam faktor kalibrasi.
Metode kalibrasi tersebut dicoba untuk diujikan pada fish finder CruzPro PcFF88 yang memiliki spesifikasi seperti yang ditunjukkan pada Tabel 1. Gelombang suara yang ditransmit dari transducer
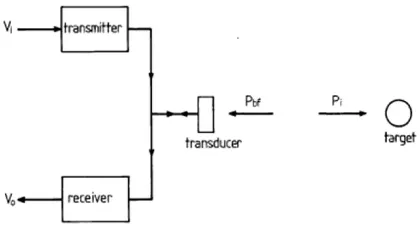
CruzPro menjalar pada kolom air lalu mengenai target (bola sphere) dan kemudian gelombang suara akan kembali diterima oleh receiver transducer. Gelombang suara yang kembali tersebut dinamakan echo.
[image:8.595.329.539.338.453.2]Gambar1 blok diagram pengukuran refleksi bola sphere
Tabel 1Spesifikasi CruzPro Fish Finder PCF8850
Parameter Nilai
Frekuensi (kHz) 200
Transmitted Power (Watt) 320
Near Field (m) 0.38
Kecepatan Suara (m/s) 1516
Durasi Pulsa (ms) 0.4
Ping Rate (s) 0.334
Amplifier Gain (dB) -20.83
Menurut Sawada dan Furusawa[3], metode
58 dari sebuah bola sphere sangat tergantung pada frekuensi instrumen, diameter, dan massa jenis dari bola sphere tersebut. Namun, nilai TS juga sangat tergantung pada kecepatan suara yang merambat di air dan pada bola sphere tersebut, dimana faktor kecepatan suara tersebut sangatlah sulit untuk dihitung.
2
Metode
Kami mencoba melakukan metode kalibrasi bola
sphere dan integrasi echo pada fish finderCruzPro PcFF88 di sebuah water tank yang berisi air tawar dengan kedalaman maksimal 2.5 m. Frekuensi yang digunakan sebesar 200 kHz dengan pengukuran TS.
Bola sphere yang terbuat dari material tungsten carbide dengan diameter 35 mm diletakkan sejauh 1 m dari permukaan transducer, sedangkan permukaan transducer diletakkan sejauh 70 cm dari permukaan air.
Gambar2 sistem diagram blok QES
3
Diskusi
3.1
Percobaan Forbes
et. al
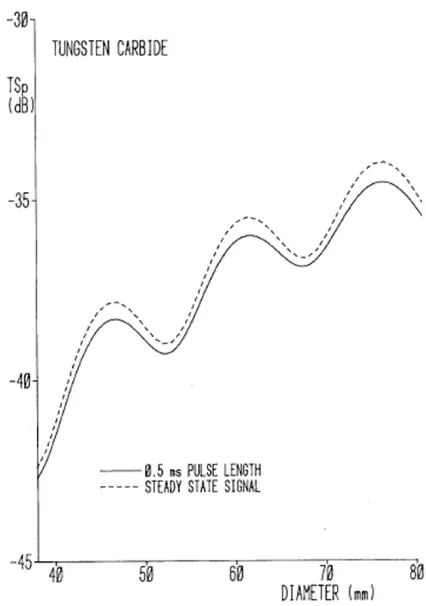
Kami membandingkan nilai TS yang kami dapatkan dengan percobaan yang telah dilakukan sebelumnya oleh Forbes, Simmonds, dan Edward[5]
[image:9.595.327.540.97.400.2]yang mengukur nilai TS dari bola sphere dengan diameter yang berbeda-beda.
Gambar 3 target strength dari sphere tungsten carbide
Berdasarkan percobaan yang dilakukan oleh Forbes et. al tersebut, semakin besar ukuran bola
sphere maka nilai TS akan semakin besar juga, namun hubungan keduanya tidak linear, melainkan pada ukuran-ukuran tertentu nilai TS akan kembali mengecil baru kemudian membesar lagi. Hasil yang didapatkan dari percobaan tersebut menunjukkan bahwa bola sphere dengan ukuran diameter 35 mm memiliki nilai TS di antara -40 dB sampai -45 dB. Hasil yang kami dapatkan, yaitu TS dari bola sphere yang diukur dengan instrumen CruzPro PcFF88 memiliki nilai -42.5 dB berada di dalam rentang nilai dari percobaan Forbes et. al.
Pulse Generator Transmitter
Transducer 40 log r
Color Display
Seminar Nasional Instrumentasi, Kontrol dan Otomasi (SNIKO) 2015 Bandung, Indonesia, 10-11 Desember 2015
[image:10.595.85.292.108.274.2] [image:10.595.333.549.300.544.2]59
Gambar 4 echogram TS hasil rekaman CruzPro PcFF88
Gambar 4 menunjukkan hasil echogram atau nilai
echo bola sphere pada kedalaman 1 m yang diukur menggunakan instrumen CruzPro PcFF88. Dari echogram tersebut dapat diketahui bahwa nilai TS dari bola sphere adalah -42.5 dB.
3.2
Parameter SONAR
Source Level
Source level (SL) dari proyektor ke segala arah selalu direferensikan pada jarak standar 1 m atau 1 yard dari pusat akustiknya (dalam hal ini adalah bola sphere). Menurut Waite[6], pada jarak 1 m dari
pusat akustik bola sphere dengan luas area 4 = 12.6 m2. Jika daya luaran yang digunakan
adalah P watt, SL didefinisikan dengan persamaan
= 10 log (1)
=10 . × / .
=10 log P + 10 log (1.1846 × 1017)
SL =10 log P + 170.8 dB (2) (jika jarak standar adalah 1 yard, SL = 10 log P + 171.5 dB). Karena P yang digunakan saat pengambilan data adalah 320 Watt, maka SL = 195.85 dB.
Transmission Loss
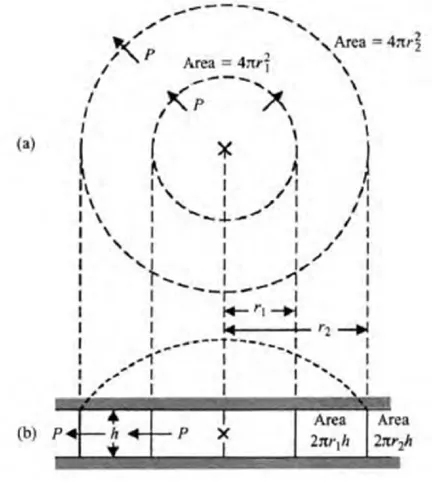
Transmission loss (TL) atau yang biasa sering disebut juga sebagai propagation loss (PL) adalah perhitungan kuantitatif dari hasil reduksi intensitas suara antara sumber dan target. PL dapat disebabkan oleh spreading loss maupun absorpsi dari kolom perairan. Pada kasus bola sphere,
power dari transducer diradiasikan ke semua arah sama besarnya. Karena P = intensitas × area,
= 4 = 4 = ⋯ = 4
dan jika r1 = 1 m, fungsi PL menjadi
= 10 = 10 (3)
atau dalam bentuk logaritmik,
= 20 log (4)
dimana r dalam meter. Jarak antara transducer dan bola sphere adalah 1 m, maka nilai PL adalah 0 dB.
Gambar 5 spreading loss
4
Kesimpulan
Frekuensi 200 kHz merupakan frekuensi yang biasanya digunakan untuk survei ikan di laut dangkal. Untuk kalibrasi instrumen dengan menggunakan target bola sphere dengan diameter sekitar 40 mm, nilai TS yang harus dikeluarkan oleh instrumen tersebut haruslah berkisar -42 dB atau lebih besar. Instrumen CruzPro PcFF88 sudah terkalibrasi dengan baik.
5
Daftar Pustaka
60 equipment,” J. Acoust. Soc. Am. 71, 742-747 (1982).
[2] K.G. Foote, H.P. Knudsen, G. Vestnes, D.N. MacLennan, and E.J. Simmonds, “Calibration of Acoustic Instruments for Fish Density Estimation: A Practical Guide,” International Council for the Exploration of the Sea (1987). [3] K. Sawada and M. Furusawa, “Precision
calibration of echo sounder by integration of standard sphere echoes,” J. Acoust. Soc. Jpn. (E)14, 4 (1993).
[4] D. N. MacLennan, “The Theory of Solid Spheres as Sonar Calibratlcm Targets,” Scottish Fisheries Research Report (1981). [5] S.T. Forbes, E.J. Simmonds, and J.I. Edwards,
“Progress in target strength measurements on live gadoids. Marine Laboratory Working Paper No. 80/15, 40 pp. (mimeo) (1980).