TUGAS SARJANA
PERENCANAAN LIFT UNTUK KEPERLUAN
GEDUNG PERKANTORAN BERLANTAI
SEPULUH
OLEH :
INDRA JAYA BARUS
NIM : 020421039
PROGRAM EKSTENSI
JURUSAN TEKNIK MESIN
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEAN
UNIVERSITAS SUMATERA UTARA
FAKULTAS TEKNIK JURUSAN TEKNIK MESIN
MEDAN
TUGAS SARJAN A
MESIN PEMINDAH BAHAN
PERENCANAAN LIFT UNTUK KEPERLUAN
GEDUNG PERKANTORAN BERLANTAI SEPULUH
Oleh :
IR. RASKITA MELIALA IR. ISRIL AMIR
INDRA JAYA BARUS
NIM : 020421039
TELAH DISETUJUI DARI HASIL SEMINAR TUGAS SARJANA PERIODE KE 103 TANGGAL 31 MARET 2008
Dosen Pembanding I Dosen Pembanding II
DAFTAR ISI
hal
KATA PENGANTAR ... i
SPESIFIKASI TUGAS ... ii
DAFTAR ISI ... iii
DAFTAR GAMBAR ... iv
DAFTAR TABEL ... v
DAFTAR NOTASI ... vi
BAB I PENDAHULUAN ... 1
1.1.LATAR BELAKANG PERENCANAAN... 1
1.2.TUJUAN PERENCANAAN... 1
1.2.1. Tujuan Teknis ... 1
1.2.2. Tujuan Akademis ... 2
1.3. BATASAN PERENCANAAN ... 2
1.4. METODE PERENCANAAN ... 2
BAB II PEMBAHASAN MATERI ... 4
2.1. MESIN PEMINDAH BAHAN ... 4
2.2. KLASIFIKASI MESIN PEMINDAH BAHAN... 4
2.3. PEMILIHAN JENIS MESIN PEMINDAH BAHAN ... 5
2.4. LIFT DAN CARA KERJANYA ... 5
2.4.1. Pemakaian Lift ... 6
2.4.2. Pemasangan Lift ... 7
2.4.3. Ruang Peletakan Lift ... 7
2.4.4. Sistem Penggerak Lift... 8
2.4.5. Metode Pengoperasian Lift ... 11
2.5. BAGIAN-BAGIAN UTAMA LIFT ... 15
2.5.1. Bagian-bagian pada Ruang Atas Sangkar ... 15
BAB III PERENCANAAN KOMPONEN UTAMA UNIT LIFT ... 28
3.1. KONDISI GEDUNG YANG DILAYANI LIFT ... 28
3.2. PERENCANAAN KAPASITAS LIFT ... 30
3.3. PERENCANAAN TALI BAJA ... 38
3.3.1. Bahan Tali Baja ... 38
3.3.2. Luas Penampang Tali Baja ... 39
3.3.3. Diameter Tali Baja ... 42
3.3.4. Umur Tali Baja ... 43
3.3.5. Pemeriksaan Kekuatan Tali Baja ... 46
3.4. PERENCANAAN PULI ... 47
3.4.1. Diameter Puli ... 47
3.4.2. Perencanaan Diameter Poros Puli ... 49
3.4.3. Pemeriksaan Tekanan pada Alur Puli oleh Tali ... 50
BAB IV PERENCANAAN SISTEM TRANMISI... 52
4.1. PERENCANAAN DAYA MOTOR ... 52
4.1.1.Pemilihan Motor Penggerak... 52
4.1.2. Perencanaan Generator Set ... 55
4.1.3. Pemeriksaan Motor terhadap Beban Lebih (Over Load) ... 56
4.2. PERENCANAAN RODA GIGI CACING ... 59
4.2.1. Putaran Puli ... 60
4.2.2. Bagian-bagian Utama Roda Gigi Cacing... 61
4.2.3. Perencanaan Ukuran Roda Gigi Cacing ... 62
4.2.4. Pemeriksaan Kekuatan Roda Gigi Cacing ... 68
4.2.5. Analisa Gaya pada Roda Gigi Cacing ... 68
4.3. PERENCANAAN POROS ... 74
4.3.1. Analisa Gaya pada Poros ... 75
4.3.1.1. Analisa Gaya Geser Akibat Gaya Radial ... 76
4.3.1.2. Analisa Momen Lentur Akibat Gaya Radial ... 77
4.4. PERENCANAAN BANTALAN ... 82
4.5. PERENCANAAN REM ... 85
4.5.1. Persyaratan Teknik ... 85
4.5.2. Persyaratan Biologik... 86
4.5.3. Pengereman Lift ... 86
4.5.4. Momen Statik Pada Saat Pengereman ... 88
4.5.5. Momen Dinamik pada Saat Pengereman ... 89
4.5.6. Pemeriksaan Momen Pengereman ... 92
BAB V KESIMPULAN ... 94
DAFTAR PUSTAKA ... 95
DAFTAR GAMBAR
Hal
GAMBAR 2.1 ... 9
GAMBAR 2.2 ... 10
GAMBAR 2.3 ... 14
GAMBAR 2.4 ... 16
GAMBAR 2.5 ... 18
GAMBAR 2.6 ... 19
GAMBAR 2.7 ... 22
GAMBAR 2.8 ... 24
GAMBAR 2.9 ... 24
GAMBAR 2.10 ... 25
GAMBAR 2.11 ... 26
GAMBAR 2.12 ... 27
GAMBAR 3.1 ... 39
GAMBAR 3.2 ... 40
GAMBAR 4.1 ... 60
GAMBAR 4.2 ... 61
GAMBAR 4.3 ... 68
GAMBAR 4.4 ... 71
GAMBAR 4.5 ... 76
GAMBAR 4.6 ... 76
GAMBAR 4.7 ... 77
GAMBAR 4.8 ... 78
GAMBAR 4.9 ... 80
GAMBAR 4.10 ... 80
GAMBAR 4.11 ... 81
GAMBAR 4.12 ... 81
GAMBAR 4.13 ... 81
DAFTAR TABEL
Hal
TABEL 3.1 Jumlah Karyawan Setiap Lantai pada Gedung Bank SUMUT Medan . 28
TABEL 3.2 Waktu Muat ... 31
TABEL 3.3 Perkiraan Berhenti ... 31
TABEL 3.4 Waktu Pinti Membuka dan Menutup ... 34
TABEL 3.5 Waktu Naik Antar Titik Berhenti ... 35
TABEL 3.6 Jumlah Semua Faktor Waktu ... 36
TABEL 3.7 Diameter Alur Puli Penggerak ... 48
TABEL 3.8 Tekanan Bidang pada Puli ... 49
TABEL 4.1 Harga X dan Y dan Hubungannya dengan harga e ... 83
BAB I PENDAHULUAN
1.1.LATAR BELAKANG
Seiring dengan perkembangan ilmu pengetahuan dan teknologi, manusia
secara terus menerus melakukan pengembangan peralatan yang dapat mempermudah
penyelesaian pekerjaan. Sistem pemindahan bahan atau transportasi yang efektif dan
efisien sangat dibutuhkan untuk menunjang kemajuan di bidang perindustrian dan
perkantoran. Hal ini disebabkan karena jumlah penduduk yang terus meningkat
sementara lahan yang tersedia semakin sempit, terutama di daerah perkotaan,
sehingga gedung – gedung perkantoran menjadi semakin menjulang.
Salah satu sistem pengangkat yang sangat penting dalam bidang perindustrian
dan perkantoran adalah lift. Peralatan ini dipergunakan untuk mengefesienkan waktu
dan tenaga bagi manusia untuk menuju lantai tujuannya masing – masing dalam
suatu gedung bertingkat.
1.2.TUJUAN PERENCANAAN 1.2.1. Tujuan Teknis
Perencanaan ini bertujuan untuk merancang suatu unit lift untuk mengangkat
, memindahkan manusia dari satu lantai ke lantai yang lain dengan kapasitas tertentu
pada suatu gedung bertingkat tinggi, dengan memperhatikan faktor keamanan dan
1.2.2. Tujuan Akademis
Perencanaan ini bertujuan untuk melengkapi persyaratan untuk
menyelesaikan Program Pendidikan Sarjana (S1) di Fakultas Teknik Jurusan Teknik
Mesin Universitas Sumatera Utara.
Perencanaan ini juga bertujuan untuk meningkatkan kemampuan mahasisa
dalam mengaplikasikan ilmu pengetahuan yang diperoleh selama mengikuti
perkuliahan dan melatih mahasiswa untuk menggunakan buku literatur / rujukan
yang ada, serta untuk menambah wawasan pengetahuan pada displin ilmu yang akan
menjadi profesi.
1.3.BAHASAN PERENCANAAN
Luasnya jangkauan permasalahan yang terdapat pada perencanaan ini
menyebabkan perlunya diadakan pembatasan masalah yang akan dikaji agar
pembahasan tidak mengambang. Adapun batasan pada perencanaan ini dititik
beratkan pada pemilihan jenis pemindah bahan yang sesuai, perhitungan komponen –
komponen utama, sistem transmis, pemilihan motor dan juga gambar perencanaan.
Sistem kontrol dari lift tidak akan dibahas secara mendalam.
1.4.METODE PERENCANAAN
Metode yang digunakan pada perencanaan ini adalah berupa survey langsung ke
gedung Bank Sumut Medan dan ditambah studi literatur / rujukan dengan
memaparkan teori dasar dan rumus – rumus empiris yang berkaitan dengan
perhitungan yang dilakukan. Pemakaian rumus umum yang sering dipakai dalam
ada, penggunaan tabel dan grafik, yang merupakan metode yang baik untuk
BAB II
PEMBAHASAN MATERI
2.1. MESIN PEMINDAH BAHAN
Mesin pemindahan Bahan merupakan suatu sistem peralatan yang digunakan
untuk mengangkat / memindahkan muatan dari suatu tempat ke tempat lain, dimana
jumlah, ukuran dan jarak pemindahannya terbatas.
Mengingat perkembangan ilmu pengetahuan dan teknologi dan kemajuan di
bidang industri maka diperlukan mesin pemindah bahan yang tepat yang akan
meningkatkan efisiensi dari aktivitas tersebut.
2.2. KLASIFIKASI MESIN PEMINDAH BAHAN
Banyaknya jenis Mesin Pemindah Bahan yang tersedia mebuatnya sulit
digolongkan secara tepat. Penggolongan ini masih diperumit lagi oleh kenyataan
bahwa penggolongan ini juga didasarkan pada berbagai karakteristik, misalnya
desain, tujuan, jenis gerak dan sebagainya.
Mesin pemindah bahan, dalam operasinya dapat diklasifikasikan atas :
1. Alat pengangkat
Contohnya : - Elevator
- Escalator
- Crane
2. Alat pengangkut
Bila digolongkan berdasarkan jenis gerakannya, maka dapat dibedakan atas :
1. Gerak naik dn turun (hoist)
2. Gerak Transversal
3. Gerak longitudinal
2.3. PEMILIHAN JENIS MESIN PEMINDAH BAHAN
Dalam perencanaan ini dipilih mesin pemindah bahan dengan gerakan naik –
turun (hoist). Adapun mesin pemindah bahan yang akan direncanakan nantinya akan
ditempatkan dalam suatu ruangan yang mempunyai ruang gerak yang terbatas. Oleh
sebab itu faktor – faktor yang perlu dipertimbangkan dalam pemilihan jenis Mesin
Pemindah Bahan yang sesuai adalah :
- Penempatan peralatan sedapat mungkin tidak mengganggu aktivitas dan
ruang gerak pekerja / karyawan
- Aman dan efisien dalam operasi
- Nyaman dalam pemakaian, sebab muatan yang akan diangkut adalah
manusia.
Sehubungan dengan pertimbangan faktor – faktor kondisi kerja tersebut di
atas, maka dipilih lift sebagai alat pemindah bahan yang sesuai.
2.4. LIFT DAN CARA KERJANYA
Lift adalah alat pengangkat yang ditujukan khusus untuk mengangkat /
memindahkan barang atau orang secara vertikal di dalam sangkar yang bergerak
Adapun cara kerja dan lift ini adalah dengan gerakan naik-turun (hoist)
dimana sangkar yang berisi barang atau orang dan beban pengimbang digantungkan
pada tali yang ditarik naik atau turun dengan menggunakan, puli, dimana puli ini
berputar sesuai dengan kebutuhan. Puli digerakkan oleh motor listrik dan gerakan
puli digerakkan oleh motor listrik dan gerakan puli dihentikan oleh rem, sehingga
barang atau orang tidak akan naik atau turun setelah posisi angkat yang diinginkan
tercapai.
2.4.1 Pemakaian Lift
Pemakaian lift dapat dibagi atas beberapa klasifikasi, yaitu :
1. Pemakaian umum atau perniagaan (General Purpose or Comercial) yaitu tipe
lift yang digunakan pada pemakaian yang bersifat umum contohnya : pada
kantor – kantor dagang atau perusahaan.
2. Pemakaian pada tempat tinggal (Residential)
Yaitu tipe lift yang digunakan pada rumah tempat tinggal
Contohnya : pada rumah tempat tinggal
3. Pemakaian pada supermarket (Store)
Yaitu tipe lift yang dipergunakan pada swalayan atau pusat perbelanjaan.
4. Pemakaian pada lembaga – lembaga (Institutional_
Yaitu tipe lift yang dipakai pada bangunan untuk suatu bentuk kelembagaan
Contoh : pada lembaga pendidikan
2.4.2. Pemasangan Lift
1. Pemasangan dengan satu sangkar (Single Car)
Di dalam satu gedung hanya terdapat satu sangkar saja atau dengan kata lain
gedung tersebut hanya dilayani oleh satu unit lift saja. Pemasangan ini
biasanya terdapat pada gedung yang tidak begitu tinggi dan tidak luas serta
lalu lintas pemakainya tidak ramai.
2. Pemasangan dengan lebih dari satu sangkar
Pada bangunan tersebut terdapat lebih dari satu sangkar. Jika ada panggilan,
akan terjadi respon dan interaksi antara beberapa sangkar tersebut. Sangkar
yang paling dekat dan tidak sedang bekerjalah yang akan melayani panggilan
tersebut. Sistem ini dipakai pada gedung bertingkat banyak serta luas dan
mempunyai lalu lintas pemakaian yang ramai.
Ruang Peletakan Mesin
Bila ditinjau dari ruang tempat peletakan mesin utama dari lift, terdapat dua
tipe sistem peletakannya, yaitu :
1. Penthouse Machine Room Type
Mesin lift ditempatkan pada bagian atas sangkar lift.
2. Basement Machine Room Type
Mesin lift ditempatkan di bagian bawah sangkar lift.
Sistem Pengerak Lift
Bila ditinjau dari sistem penggerak lift, terdapat dua sistem yang digunakan
pada gedung – gedung bertingkat, yaitu :
2. Penggerak Lift Sistem Hidrolik
a. Penggerak Lift Sistem Wrap
Pada sistem ini penggerak utama dari sangkar lift tersebut adalah motor
listrik, dari motor tersebut akan dikopelkan ke poros mesin lift (Lift Driving
Machine), yaitu suatu alat yang menggerakkan puli penggerak dan selanjutnya puli
penggerak akan menarik tali yang diikat pada sangkar lift dan beban pengimbang.
Dengan demikian sangkar lift dan beban pengimbang akan bergerak naik atau turun
sesuai dengan putaran puli penggerak.
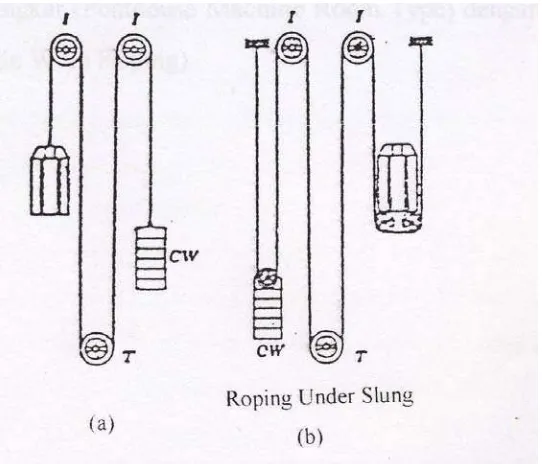
Sistem pemasangan tali pada sistem Wrap dapat dibedakan berdasarkan
peletakan ruang mesin.
- Penthouse Machine Room
Pemasangan tali pada sistem Wrap pada Penthouse Machine Room Type dapat
dilihat pada Gambar 1.1.
a. Single Wrap Roping
Tali dipasang satu kali jalan, tanpa lilitan, tali diletakkan di atas puli dan
melalui katrol, kemudian tali diikatkan di atas sangkar lift dan beban
pengimbang (Gambar a)
b. Double Wrap Roping
Ada dua cara pemasangan tali pada jenis Double Wrap Roping ini, yaitu : tali
dipasang satu kali lilit, dimana tali dililitkan pada puli dan katrol, kemudian
tali diikatkan di atas sangkar lift dan beban pengimbang (Gambar c) atau tali
dipasang dua kali lilit, tali diletakkan di atas puli dan dililitkan ke katrol,
kemudian dikembalikan ke atas sebagai titik tumpuan beban (Point of
Support).
Gambar 2.1. Pemasangan Tali pada Sistem Wrap – Penthouse Room Type
- Basement Machine Room
Pemasangan tali pada sistem Wrap pada Basement Machine Room Type dapat
dilihat pada Gambar 1.2.
Roping Under Slung
Sangkar lift dan beban pengimbang ditahan oleh dua buah katrol, selanjutnya puli
penggerak yang berada di bawah sangkar akan memutar kedua katrol yang
menggerakkan sangkar lift dan beban pengimbang dalam arah yang saling
Gambar 2.2. Pemasangan Tali pada Sistem Wrap – Basement Machine Room Type
b. Penggerak Lift Sistem Hidrolik
Lift sistem hidrolik memerlukan daya lebih kecil dibandingkan dengan sistem
wrap. Nama hidrolik diberikan karena sangkar ini digerakkan oleh sebuah pompa
dilayani oleh sebuah motor penggerak, sehingga dengan perubahan tekanan pada
minyak (oil) akan menyebabkan naik atau turunnya sangkar lift.
Sistem hidrolik dan cara kerjanya persis sama dengan dongkrak mobil
hidrolik, minyak dari penampung dipompakan oleh plunyer untuk mengangkat
sangkar lift tersebut. Pompa dihentikan sampai titik terbawah, selanjutnya sangkar
lift tersebut diturunkan dengan gaya gravitasi dan Bypass Control yang juga
mengontrol posisi dari sangkar lift tersebut sampai pada titik tertinggi.
Sistem kontrol yang digunakan pada lift dengan sistem penggerak hidrolik
biasanya sama dengan yang terdapat pada sistem penggerak wrap. Namun pada
memerlukan motor dengan daya yang lebih besar dibandingkan dengan kebutuhan
motor untuk keperluan yang sama pada sistem wrap.
Berdasarkan pertimbangan dari uraian di atas maka pada perencanaan ini
sistem penggerak lift yang akan dipergunakan adalah sistem Wrap dengan
peletakkan motor pada bagian atas sangkar (Penthouse Machine Room Type) dengan
pemasangan tali satu kali jalan (Single Wrap Roping).
Metode Pengoperasian Lift
Metode pengoperasian lift adalah cara kerja lift dalam memberikan response
terhadap panggilan yang diberikan penumpang.
Metode operasi lift secara umum dibedakan atas dua cara, yaitu :
1. Pengoperasian Manual
Pengoperasian secara manual merupakan sistem pengoperasian sangkar
lift dengan kecepatan rendah dan dapat berhenti pada posisi sembarang titik yang
dikehendaki, misalnya untuk kondisi perawatan atau untuk keperluan khusus.
Dalam pengoperasiannya, lift diatur oleh seorang operator. Dengan
demikian semua panggilan harus dikirim ke meja operator, kemudian operator
mengatur gerakan sangkar lift ke posisi level lantai yang diinginkan / dipesan
penumpang. Metode ini jarang digunakan mengingat kurang praktisnya di dalam
penggunaannya.
2. Pengoperasian Otomatis
Pengoperasian lift secara otomatis memberikan respon secara langsung
kepada penumpang yang memanggil sangkar lift.
Pada metode operasi ini, pada setiap lantai hanya terdapat satu buah
tombol untuk memanggil sangkar, sedangkan di dalam sangkar lift terdapat
tujuan level lantai yang diinginkan. Selama ini lift bekerja, lift tidak melayani
panggilan dari penumpang lain. Lift akan memberikan tanggapannya setelah
lift selesai melaksanakan tugasnya. Dengan kata lain lift baru dapat dipanggil
apabila sangkar lift dalam keadaan tidak bekerja.
Dari penjelasan – penjelasan prinsip kerja di atas, dapat dikatakan
bahwa metode Single Automatic Push Bottom ini hanya dapat melayani
panggilan satu persatu, artinya sangkar baru dapat dipanggil apabila lift
dalam keadaan diam. Dengan demikian metode ini hanya efektif digunakan
untuk gedung dengan dua atau tiga lantai dengan pemakaian lift yang tidak
terlalu mendesak, misalnya untuk lift pengangkut baran.
b. Metode Selecticve-Collective
Pada metode operasi ini terdapat dua buah tombol panggilan pada
setiap lantai, yaitu tombol panggilan naik (∆) dan tombol panggilan turun
(∇), kecuali pada lantai terendah dan tertinggi yang masing – masing hanya
terdapat sato tombol panggilan. Di dalam sangkar lift terdapat tombol tujuan
level lantai yang digunakan.
Metode operasi Selective-Collective ini lebih praktis dan efisien
dalam menanggapi panggilan dibandingkan dengan Single Automatic Push
Bottom. Pada metode ini, secara otomatis sangkar lift akan melayani semua
panggilan naik pada saat sangkar lift naik dan melayani semua panggilan
turun pada saat sangkar lift turun, pada lantai yang akan dilaluinya. Dengan
dengan metode Single Automatic Push Bottom karena sangkar lift dapat
dipanggil walaupun lift dalam keadaan sedang bekerja.
c. Metode Duplex-Collective
Pada prinsipnya, metode Duplex-Collective ini hampir sama dengan
metode Selective-Collective. Metode Duplex-Collective merupakan operasi
gabungan dari dua atau lebih lift yang bekerja secara Selective-Collective.
Pada metode ini. Pada tiap lantai terdapat tombol bersama untuk
memanggil sangkar lift. Apabila tombol panggilan ditekan maka sangkar
dengan posisi paling dekat dan dengan arah yang sesuai dengan panggilan,
akan melayani panggilan tersebut. Hal ini merupakan keistimewaan metode
ini dibanding dengan metode Selective-Collective. Tombol tujuan terdapat
pada setiap sangkar yang berfungsi untuk mengoperasikan sangkarnya
masing – masing.
Dari pertimbangan – pertimbangan pada uraian di atas, maka metode
pengoperasian lift yang dipakai disini adalah pengoperasian otomatis dengan prinsip
Cara kerja :
- Apakah tombol naik (Up Button) ditekan maka arus akan mengalir ke
kumparan naik (Up Coil). Setelah kumparan berisi arus listrik, kumparan
akan mengisi arus ke pengatur waktu otomatis naik (Up Timer) dan semua
swich naik (Up Relay) akan menutup sehingga mengalirkan arus ke motor
penggerak. Motor penggerak memutar ke kanan mengangkat sangkar lift
pada selang waktu yang telah diatur oleh pengatur waktu otomatis naik (Up
Timer). Apabila pengatur waktu otomatis menyatakan selesai atau waktu
untuk langkah tersebut selesai maka arus akan terhenti dan sangkar lift
berhenti pada lantai yang diinginkan oleh pengatur waktu otomatis tersebut.
- Apabila tombol turun (Down Button) ditekan maka arus akan mengalir ke
kumparan turun (Down Coil). Setelah kumparan berisi arus, kumparan akan
mengisi arus ke pengatur waktu otomatis turun (Down Timer) dan semua
swich turun (Down Relay) akan menutup sehingga akan mengalirkan arus ke
motor penggerak memutar ke kiri dan menurunkan sangkar lift pada selang
waktu yang ditentukan oleh pengatur waktu otomatis turun (Down Timer)
sampai pengatur waktu otomatis menyatakan selesai dan sangkar lift terhenti
pada lantai yang diinginkan oleh pengatur waktu otomatis tersebut.
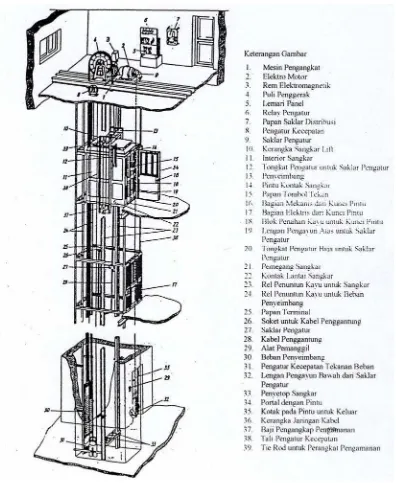
BAGIAN – BAGIAN UTAMA LIFT
Bagian – bagian pada Ruang Atas Sangkar (Penthouse Machine Room) Sebagian besar peralatan lift tipe Phenhouse Machine Room ditempatkan di
Gambar 2.4. Bagian – bagian Utama Lift Penumpang
Komponen-komponen utama peralatan lift tipe Phenhouse Machine Room
yang ditempatkan di bagian atas sangkar lift adalah :
1. Elektro Motor
2. Mesin Lift
3. Lemari Panel Relay
1. Elektro Motor
Penggerak utama lift adalah sebuah elektro motor yang digerakkan oleh
listrik PLN atau generator listrik yang dilengkapi dengan pengatur medan (Field
Control) yang dikontrol secara numerik (Numerical Control).
Elektro Motor dikopel ke rangkaiaan Gear Box yang berfungsi untuk
mereduksi putaran elektro motor dengan mesin lift (Elevator Driving Machine) puli
dan rem listrik.
2. Mesin Lift
Desain lift disini menggunakan mesin pengangkat jenis puli dan roda puli
penggerak. Pada desain dengan drum, tali yang menahan sangkar diikatkan pada
drum dan dilihatkan pada permukaannya, sedangkan pada desain dengan roda puli
penggerak, penggerak tali melewati roda puli yang digerakkan oleh gaya gesek.
Dalam perencanaan ini dipilih mesin pengangkat dengan puli penggerak
karena memiliki beberapa kelebihan, diantaranya :
- Dapat digunakan untuk mengangkat pada segala macam ketinggian.
- Ukurannya lebih kompak.
- Lebih efektif karena gaya traksi pada roda puli penggerak akan hilang bila
sangkar yang sedang turun terbentur hambatan. Dalam hal ini, kelonggaran
bagian tali yang keluar dari puli akan menyebabkan tergelincirnya roda puli
pada tali sehingga tali akan mengencang kembali.
- Penggunaan mesin pengangkat jenis roda puli ini telah mengurangi
kecelakaan secara drastis akibat putusnya tali.
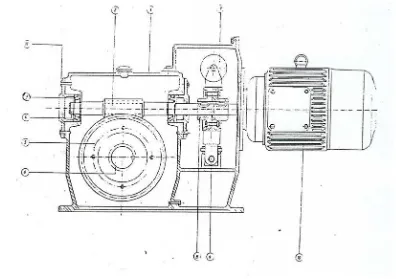
Gambar 2.5. Mesin Lift dan Elektromotor
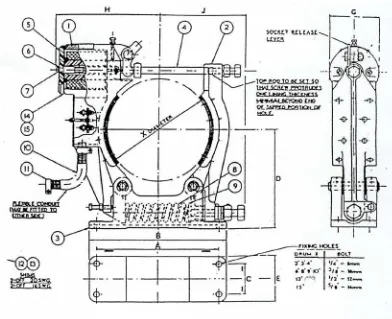
3. Rem Lift
Prinsip kerja rem lift sama dengan kontak NC dari suatu relay atau
kontraktor, dimana rem akan dalam keadaan menjepit poros mesin lift pada saat
sangkar lift tidak bekerja, sebaliknya rem akan melepaskan poros lift apabila coil rem
listrik tersebut terenergi. Dengan demikian apabila sumber arus dari panel utama
putus pada saat lift bergerak, penumpang akan aman dari bahaya benturan yang
timbul apabila rem tidak menjepit poros mesin tersebut. Di bawah ini diperlihatkan
Gambar 2.6 Rem Lift
4. Lemari Panel
Lemari panel merupakan tempat sebagian besar peralatan listrik (komponen –
komponen kontrol) disambungkan, seperti relay, transformator dan penyearah . Tiap
unit lift memiliki masing – masing satu buah lemari panel.
5. Governor
Governor adalah merupakan kecepatan lebih (over speed) pada lift. Prinsip kerjanya
adalah berdasarkan gaya sentrifugal. Tali (rope) governor dihubungkan ke bagian
atas dan bawah sangkar melalui dua buah puli governor. Puli governor ditempatkan
di ruang mesin atas dan yang lainnya ditempatkan di bagian bawah (basement)
Bagian – bagian pada Terowongan (Hoist Way)
Terowongan yang dimaksud pada sistem lift adalah terowongan vertikal yang
menjadi jalan atau saluran tempat dimana sangkar lift dan beban pengimbang
bergerak naik dan turun.
Pada terowongan ini terdapat beberapa peralatan seperti :
1. Saklar pembatas
2. Saklar Lift
3. Beban Pengimbang
4. Tali
5. Rel Penuntun
6. Alat Pengaman Lift
1. Sakelar Pembatas
Sakelar pembats berfungsi untuk menghubungkan atau memutuskan
rangkaian dari sistem listrik dari sumbernya tanpa campur tangan operator, akan
tetapi diaktifkan oleh sentuhan mekanik dari suatu material.
Pada pengoperasiannya, ada beberapa sakelar pembatas sebagai sakelar bantu
untuk pengaturan kerja rangkaian lift. Pada pengamanan beban lebih sangkar lift,
sakelar pembatas ini akan bekerja jika beban atau penumpang yang masuk ke dalam
sangkar melampui kapasitas (daya angkut) lift tersebut. Sakelar pembatas juga
digunakan pada operasi membuka dan menutup pintu lift serta juga terdapat pada
2. Sangkar Lift
Sangkar lift adalah suatu kerangka kendaraan yang mempunyai ruangan
untuk tempat penumpang atau barang yang akan dipindahkan. Sangkar ini harus
tertutup dan dilengkapi dengan pintu.
Sangkar ini harus kokoh, ringan dan desainnya sederhana. Pada bagian dalam
sangkar lift terdapat tombol – tombol pengatur arah tujuan dan indikator posisi lift,
lampu penerangan, push booton, open door, close door, earphone, dan tombol stop
had / auto.
Berikut ini diperlihatkan gambar tata letak peralatan dan tombol operasi di
3. Beban Pembimbing
Beban pembimbing adalah beban pemberat untuk mengimbangi berat sangkar
lift. Gerakan beban pengimbang berlawanan arah dengan sangkar lift. Dengan
demikian secara tidak langsung beban pengimbang akan mengurangi daya yang
harus disediakan oleh hoisting motor.
Beban pengimbang terdiri dari satu kerangka baja dengan desain yang
berlapis yang akan memudahkan bobot dan penyerderhanaan perakitan. Penggunaan
beban pengimbang ini adalah untuk memberikan keuntungan konsumsi daya yang
diperlukan lift.
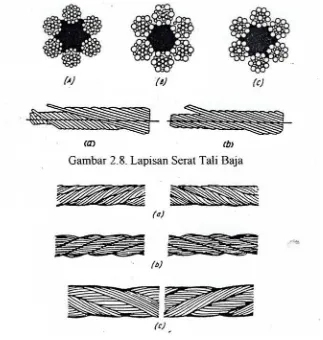
4. Tali Baja
Tali digunakan sebagai penghubung sangkar lift dengan beban pengimbang
melalui puli mesin, disamping itu juga dipergunakan untuk menghubungkan sangkar
Gambar 2.9. Konstruksi Serat Tali Baja
5. Rel Penuntun
Sangkar lift bergerak di dalam lorong pada rel penuntun yang terpasang tetap.
Untuk keperluan ini kedua sisi sangkar pada bagian atas dan bawah diberi dua
penuntun yang bentuknya sesuai dengan rel penuntun.
Rel atau batang penuntun terbuat dari batang baja profil siku T-ganda atau
batang kayu dan diikat pada kedua sisi lorong elavator. Rel diberi pelumas gemuk
secara teratur. Kerugian gesekan pada rel penuntun diambil sebesar 5 – 10 % dari
bobot komponen gerak. Penuntun dipasang pada tempat sempit diantara dua rel,
Gambar 2.10. Rel Penuntun untuk Lift
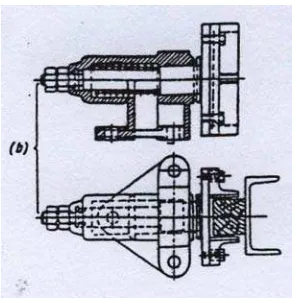
6. Alat Pengaman Lift
Sangkar lift harus dilengkapi dengan alat pengaman khusus, yaitu penahan
yang akan menghentikan sangkar secara otomatis bila tali putus atau kendur.
Banyak desain pengaman lift yang dilengkapi dengan eksentris, baji, rol
penjepit, pisau dan permukaan rem yang halus. Permukaan rem halus yang menjepit
jalur penuntun dengan kuat sepanjang permukaan kontak merupakn alat yang efisien
operasinya yang telah dibicarakan sebelumnya.
Selain rem, terdapat juga alat penggunaan lift lainnya, seperti :
- Pegas Penahan
- Penahan Gerak
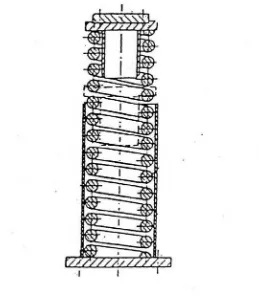
a. Pegas Penahanan
Pegas penahanan adalah merupakan suatu alat yang ditempatkan pada bagian
dasar terowongan. Alat ini berfungsi untuk mengamankan sangkar lift agar tidak
membentuk landasan (dasar terowongan) apabila suatu saat tali pengikat lift dengan
Pegas penahan bekerja berdasarkan prinsip hidrolik yang dibantu dengan
proses (spring). Dengan demikian jika sangkar jatuh secara tiba – tiba karena
putusnya tali maka sangkar akan jatuh menimpa pegas penahan dan oleh pegas
redaman hidrolik sangkar akan aman dari kemungkinan benturan yang sangat keras
apabila sangkar langsung jatuh ke dasar terowongan.
Gambar 2.11. Pegas Penahan
b. Penahan Gerak
Penahan gerak berfungsi untuk menghentikan lift secara otomatis, sebelum
kecepatan lebih (over speed). Gerak dari penahan lift dikontrol oleh governor.
Penahanan gerak akan menghentikan sangkar bila satu buah tali atau semuanya putus
BAB III
PERENCANAAN KOMPONEN UTAMA UNIT LIFT
KONDISI GEDUNG YANG AKAN DILAYANI LIFT
Untuk mengetahui kapasitas lift yang akan dirancang, maka kita harus
mengetahui kondisi gedung yang akan dilayani oleh lift tersebut, seperti jumlah
keseluruhan orang penggunaan lift, waktu kritis yang tersedia, waktu yang
dibutuhkan lift untuk menyelesaikan satu siklus dan jumlah lift yang digunakan.
Lift ini dirancang untuk melayani Gedung Bank Sumatera Utara (Bank
SUMUT) Medan. Menurut data dari Kantor Bank SUMUT, jumlah pegawai kantor
adalah sebagai berikut :
Tabel 3.1. Jumlah Karyawan Setiap Lantai pada Gedung Bank SUMUT Medan
Nomor Lantai Jumlah Karyawan (Orang)
1 120
2 100
3 95
4 80
5 75
6 70
7 65
8 60
9 50
10 40
Menurut pengamatan yang dilakukan pada lokasi survey, yaitu pada Gedung
SUMUT Medan, diperoleh bahwa hampir semua karyawan menggunakan lift untuk
mencapai lokasi gedung tempat ia bekerja, kecuali karyawan lantai satu. Hal ini
disebabkan karena sebagian karyawan yang ingin naik dari lantai I ke lantai II lebih
memilih menggunakan tangga dari pada harus antri pada jam – jam sibuk.
Pengambilan data disini dilakukan pada jam-jam paling sibuk, yaitu pada pagi hari
dari jam 7.40 – 8.00 WIB, sehingga diharapkan pengambilan data yang dilakukan
dapat mewakili kondisi paling sibuk yang mungkin terjadi.
Dari data – data dan uraian di atas dapat disesuaikan :
10 % karyawan lantai I menggunakan lift = 50 % x 120 = 12 Orang
50 % karyawan lantai II menggunakan lift = 50 % x 100 = 50 Orang
100 % karyawan lantai III sampai lantai X menggunakan lift
Sehingga jumlah keseluruhan karyawan yang menggunakan lift adalah :
Lantai I = 12 Orang
Lantai II = 50 Orang
Lantai III = 95 Orang
Lantai IV = 80 Orang
Lantai V = 75 Orang
Lantai VI = 70 Orang
Lantai VII = 65 Orang
Lantai VIII = 60 Orang
Lantai IX = 50 Orang
Pemakaian lift maksimum terjadi pada jam sibuk setelah apel pagi pukul 7.40
WIB atau pada saat pekerjaan dimulai pukul 08.000 WIB. Disini harus dengan
bahwa pada waktu tersebut karyawan menggunakn lift ke satu arah yaitu dari lantai
terendah ke lantai berikutnya sampai lantai tertinggi.
PERENCANAAN KAPASITAS LIFT
Disini ditentukan selang waktu selama 20 menit untuk perhitungan waktu
kritis, yaitu dimulai setelah apel pagi 7.00 WIB sampai pada saat pekerjaan akan
dimulai pukul 8.000 WIB, sehingga waktu yang tersedia untuk mengangkut
keseluruhan karyawan adalah 20 x 60 detik = 120 detik.
Lift yang digunakan di kantor tersebut direncanakan berkapasitas 15 orang
sebanyak 6 unit. Kemudian dilakukan perhitungan untuk membuktikan bahwa lift
dengan kapasitas 15 orang cocok untuk digunakan di kantor Bank SUMUT tersebut.
Dari waktu kritis yang tersedia, maka dihitunglah waktu yang sebenarnya
dibutuhkan. Dari sini akan diketahui apakah lift dengan kapasitas 15 orang mampu
mengangkat jumlah keseluruhan karyawan dalam masa waktu kritis tersebut.
Selama satu trip perjalanan (naik dari lantai dasar ke lantai tertinggi dan
kembali ke lantai dasar), lift membutuhkan waktu antara lain :
a. Waktu untuk memuat penumpang (waktu penumpang memasuki lift)
b. Waktu pintu membuka dan menutup
c. Waktu naik dari lantai terendah ke lantai – lantai tertinggi
d. Waktu turun dari lantai tertinggi ke lantai terendah
1. Waktu Muat Penumpang
Perkiraan waktu yang dibutuhkan untuk memuat penumpang ke dalam
sangkar lift dapat dilihat pada Tabel 3.3.
Tabel 3.2. Waktu Muat (detik)
Kapasitas (orang) 8 10 12 14 16 18 20
Waktu Muat (detik) 8 10 11 13 14 16 18
Berdasarkan Tabel 3.3. di atas maka untuk memuat penumpang sebanyak 15
orang dibutuhkan Waktu Muat selama 13,5 detik.
2. Waktu Membuka dan Menutup Pintu
Untuk menghitung waktu yang dibutuhkan lift untuk membuka dan menutup
pintu pada satu trip perjalanan, terlebih dahulu harus diperkirakan berapa kali lift
tersebut berhenti selama satu trip tersebut. Perkiraan jumlah berhenti yang terjadi
pada satu trip dapat dilihat pada Tabel 3.2 berikut ini.
Tabel 3.3. Perkiraan Berhentilah (kali)
Passenger pertrip
32 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30
30 2 4 5.78 7.6 9.5 10.5 11.7 12.8 13.8 14.8 16.0 17.2 18.0 19.0 19.5
28 2 39 6.5 7.2 9.0 10.1 11.6 12.5 13.5 14.6 15.6 16.6 17.6 18.1 18.4
26 2 38 5.5 7.0 8.5 9.8 11.2 12.2 13.1 14.1 15.1 16.0 16.8 17.4 17.7
24 2 38 5.4 6.9 8.3 9.6 10.8 11.9 12.2 13.1 14.1 15.4 16.1 16.7 17.3
22 2 37 54 68 82 95 105 116 125 133 141 148 154 161 170
18 2 37 52 66 78 89 99 108 116 123 129 134 139 144 150
16 2 36 51 65 76 86 95 103 110 116 121 126 130 134 139
14 2 36 50 63 73 83 90 97 103 108 113 116 120 122 125
12 2 35 49 60 70 78 85 90 95 99 102 105 108 110 113
10 2 34 47 58 65 72 77 82 85 88 90 92 94 95 95
8 2 33 44 53 59 64 68 70 73 75 76 77 78 78 8
6 2 31 40 46 50 53 55 57 58 58 59 59 6 6 6
4 2 27 33 36 38 39 39 4 4 4 4 4 4 4 4
2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2
Menurut Tabel 3.2 untuk gedung 10 tingkat dengan kapasitas lift 15 orang,
dengan cara interpolasi, diperoleh bahwa untuk satu trip, diperkirakan lift berhenti
sebanyak 8 kali.
Selanjutnya perlu diingat bahwa lift harus berhenti pada akhir trip di lantai
dasar. Pada setiap kali berhenti, lift wajib membuka dan menutup pintu untuk
memuat penumpang sehingga. :
Frekuensi membuka / menutup pintu = Perkiraan Berhenti Total
= Perkiraan Berhenti – 1 kali berhenti di lantai dasar
= 8 + 1 = 9 kali
Selanjutnya perlu diperhitungkan waktu yang dibutuhkan untuk sekali
membuka dan menutup pintu. Perkiraan waktu yang dibutuhkan untuk sekali
membuka dan menutup pintu dapat dilihat pada Tabel 3.4 di bawah ini.
Tabel 3.4. Waktu Pintu Membuka dan Menutup (detik)
Door Type Width
In (mm)
Open
(See)
Close
(sec)
Total
(sec)
Transfer Inefeciency
Single-Slide
Two-speed center opening
36 (900)
Tipe pintu yang direncanakan disini adalah tipe Center Opening dengan lebar
1100 mm, sehingga berdasarkan Tabel 3.4 di atas, waktu yang dibutuhkan untuk
sekali membuka dan menutup pintu adalah 4,6 detik.
Maka :
Waktu pintu membuka/menutup = Frekuensi membuka/menutup x Waktu
membuka menutup
= 9 x 4,6 detik
3. Waktu Naik
Waktu yang dibutuhkan untuk naik dari satu titik berhenti ke titik berhenti
berikutnya dapat dicari dengan cara menghitung jarak setiap titik berhenti.
Perkiraan Jarak Titik Berhenti =
Tabel 3.Waktu Naik Antar Titik Berhenti (detik)
(2 mps)
Dari Tabel 3.5. diperoleh bahwa waktu naik antar setiap titik berhenti untuk
jarak titik berhenti 5 m pada kecepatan angkat 1,5 ms, adalah 6,67 detik (dengan cara
interpolasi).
Total Waktu Naik = Waktu Naik x Perkiraan Berhenti
= 6,67 x 8
= 53,36 detik
4. Waktu Turun
Waktu yang dibutuhkan untuk turun dari lantai tertinggi ke lantai dasar
adalah :
=
5. Waktu Transfer Infesiensi
Dari Tabel 3.4 di atas, untuk pintu tipe Center Opening dengan lebar 1100
Waktu inefisiensi = 5% x (Waktu Muat + Waktu membuka / menutup
pintu + Waktu Naik + Waktu Turun)
= 100
5
x (13.5 + 41,4 + 53,36 + 26,67)
= 100
5
x 134,93
= 6,75 detik
Waktu Total
Waktu total adalah waktu yang dibutuhkan mengangkut seluruh karyawan
untuk mencapai lantai tujuan masing – masing. Total semua dapat dilihat pada Tabel
3.6 di bawah ini.
Tabel 3.6. Penjumlahan Semua Faktor Waktu
No Uraian Waktu (detik)
1 Waktu Muat Penumpang 13,5
2 Waktu Membuka dan Menutup Pintu 41,4
3 Waktu Naik 53,36
4 Waktu Turun 26,67
5 Waktu Transfer Inefisiensi 6,75
Total 141,68
Jadi waktu total yang dibutuhkan untuk menyelesaikan perjalanan dalam satu
trip, yaitu perjalanan dari lantai dasar ke lantai tertinggi dan kembali ke lantai dasar
Jumlah trip yang dibutuhkan untuk mengangkut seluruh karyawan dapat
dihitung dari :
Jumlah Trip Total =
Disini direncanakan akan bekerja 6 unit lift yang beroperasi secara
Duplex-Collective, sehingga jumlah trip yang harus dilakukan oleh masing – masing unit lift
adalah :
Jumlah Trip untuk satu unit lift =
Sehingga waktu total yang dibutuhkan untuk mengangkut seluruh karyawan :
= Jumlah Trip x Total Waktu Satu Trip
= 7 x 141,68
= 991,92 detik
Dari perhitungan tersebut diperoleh bahwa waktu total yang dibutuhkan
untuk mengangkut seluruh karyawan pengguna lift adalah 991,92 detik (16,5 menit),
sedangkan waktu kritis yang tersedia adalah 1200 detik (20 menit), yaitu dimulai dari
pukul 7.40 WIB sampai 8.00 WIB, sehingga dapat disimpulkan bahwa lift dengan
kapasitas 15 orang, dengan jumlah lift sebanyak 6 unit, cocok digunakan pada
gedung Bank Sumut Medan.
PERENCANAAN TALI BAJA
Perencanaan dalam pemilihan dan perhitungan tali baja meliputi :
1. Bahan Tali Baja
2. Luas Penampang Tali Baja
3. Diameter Tali Baja
4. Umur Tali Baja
5. Pemeriksaan Kekuatan Tali Baja
Bahan Tali Baja
Penggunaan tali pada lift merupakan kebutuhan primer, karena pada tali
inilah sangkar penampang yang akan diangkat tergantung.
Beberapa hal yang menyebabkan dipilihnya tali baja sebagai peralatan
pengangkat pada perencanaan ini yaitu :
a. Lebih ringan dibandingkan rantai
b. Lebih tahan terhadap sentakan
c. Operasi tenang walaupun pada kecepatan tinggi
d. Menunjukkan tanda – tanda bila akan putus
Dari beberapa kenyataan yang terjadi bahwa kerusakan tali
diakibatkan oleh kelelahan bahan dan setiap tali hanya dapat mengalami
kelengkungan dalam jumlah tertentu. Adapun beberapa hal yang harus
diperhatikan dalam perencanaan tali baja yaitu ukuran puli atau drum,
konstruksi tali dan umur pakai tali.
Pada perencanaan ini tali baja yang dipakai adalah Baja Karbon
Tinggi JIS G3521 dengan kekuatan putus (σb 160 kg/mm2...(Lit 3 hal 31)
Gambar 3.1. Penampang Tali Baja
Luas Penampang Tali Baja
Sebelum menghitung luas penampang tali baja, terlebih dahulu
dilakukan perhitungan kekuatan putus tali baja yang akan digunakan.
Jumlah lengkungan yang terdapat pada rangkaian tali (Number of
Gambar 3.2. Sistem Pemasangan Tali pada Puli dan Jumlah Lengkungan
Maka dengan mengambil desain tali dengan jumlah kawat i = 22, maka luas
penampang tali dapat dihitung dari :
F22
3600 d
S
b−
σ
= ... (Lit.3 hal. 39)
K Dmin
dimana :
σb = kekuatan putus kawat baja
= 160 kg / mm2 = 16.000 kg /cm
= 9,5 (dipilih) ... (Lit. 1 hal. 31)
2
S = tegangan tarik untuk satu kali
Berdasarkan survey yang dilakukan di gedung Bank Sumut Medan, disini
dipakai 5 buah tali baja, sehingga tegangan tarik untuk satu tali adalah :
Q
η = jumlah bagian suspensi (tali penyangga)
= 3 buah ... (Lit. 6 hal. 75)
= Efisiensi akibat kerugian karena kekakuan tali pada saat menggulung
sehingga luas penampang tali baja adalah :
F22
Diameter Tali Baja =
=
Diameter kawat tali baja adalah dapat dihitung dengan persamaan :
δ =
selanjutnya diameter tali baja dihitung dengan persamaan :
d = 1,5 δ i ... (Lampiran 3)
= 1,5 . 0,54 . 222
= 12,07 mm
Berdasarkan standarisasi tali baja (Lampiran 7) maka tali baja yang dipilih
disesuaikan menurut standard tersebut, yaitu :
Diameter tali (d) = 14,2 mm
Berat per meter = 0,670 kg
Kekuatan patah aktual = 10200 kg mm
Umur Tiga Baja
Umur kerja dari tali baja dipengaruhi oleh beberapa faktor, yaitu :
1. Material
2. Metode Operasi
3. Tegangan – tegangan yang bekerja pada tali
4. Jumlah penggulungan tekuk, yaitu transmisi tali dari keadaan lurus ke
keadaan bengkok atau sebaliknya
Jumlah penggulungan tekuk yang dapat diterima tali baja sebelum mengalami
kerusakan tergantung yang bekerja dan perbandingan diameter puli dengan diameter
tali baja yang dipergunakan.
Dalam hal menentukan umur tali baja, tidak terlepas pada faktor keausan tali
baja (m) yang besarnya tergantung pada jumlah tekukan (NB = Number of bend).
Besarnya faktor keausan (m) didapat dari persamaan :
D
d
M ... (Lit. 3 hal 43)
Σ NB C C1 C
d D
2
Dimana :
= perbandingan diameter puli dengna diameter tali yang diizinkan > e1
– e2 ... (Lit. 3 hal. 41)
e1 = faktor yang bergantung pada alat pengangkat dan kondisi
operasi ... (Lit. 3 hal. 42, Tabel 3)
= 0,9 ... (Lit.3 hal.42, Tabel 10)
d D
> 20 . 0,9
> 18
Harga ini masih dibawah 25 d
min D
= , maka untuk perhitungan selanjutnya
dipakai harga d D
= 25
σ = Tegangan tarik sebenarnya pada tali (kg/mm2
222
C = faktor karakteristik dari konstruksi tali dan tegangan tarik
sehingga :
Dari tabel faktor harga m pada Lampiran 6, untuk harga m = 2,83, dengan
cara interpolasi diperoleh jumlah siklus penggulungan tekuk berulang yang terjadi
sebelum tali putus (z) adalah 567647 kali penekukan.
Jumlah siklus penggulungan tekuk berulang yang diizinkan dapat dihitung
dari persamaan :
Z1
selanjutnya umur tali dapat dihitung dari persamaan :
N =
= 227058,8 kali penukukan
= jumlah tekukan berulang per siklus kerja (mode suspensi beban)
= 4 buah ... (Lit. Gambar 3.2)
Dari perhitungan tersebut diperoleh bahwa umur tali adalah 113,53 bulan atau
9,5 tahun, selanjutnya tali baja harus diganti meskipun kondisinya masih terlihat
baik.
Pemeriksaan Kekuatan Tali Baja
Tali baja diperiksa terhadap tarikan yang terjadi untuk mengetahui kondisi
aman tidaknya konstruksi lift yang dirancang. Perencanaan dikatakan aman jika
tegangan tarik yang terjadi lebih kecil dari tegangan tarik izin (S < Smax).
Tegangan tarik izin (Smax) dapat dicari dari :
Smas
K P =
Dimana :
P = kekuatan putus tali sebenarnya (kg)
= σb . F222
= 8000 kg
K = faktor keamanan lift
= 9,5 ... (Lit. 1 hal. 31)
Smax
5 , 9 8000 =
= 842 kg
Tegangan tarik izin tali diperoleh Smax
PERENCANAAN PULI
kg, sedangkan dari perhitungan
sebelumnya diperoleh bahwa tegangan tarik yang terjadi pada tali S = 122,38 kg,
sehingga dapat disimpulkan bahwa tali aman terhadap beban tarik.
Puli berfungsi sebagai penuntun arah tali baja. Pada perencanaan puli, hal –
hal yang perlu diperhitungkan adalah :
1. Diameter puli
2. Diameter poros puli
3. Pemeriksaan tekanan pada alur puli oleh tali
Diameter Puli
Diameter Dmin
d Dmin
dihitung dari persamaan = 25.
Dari perhitungan sebelumnya telah diperoleh diameter tali d = 14,2 mm, sehingga
diameter puli :
Dmin = 25 . d
= 25 . 142
Diameter puli yang dipergunakan disini adalah Dmin = 355 mm
Diameter alur puli selengkapnya diambil berdasarkan standarisasi diameter puli,
yang dapat dilihat pada tabel di bawah ini.
Tabel 3.7 Dimensi Alur Puli Penggerak
Dia
-Maka dengan cara interpolasi diperoleh ukuran – ukuran puli penggerak
untuk diameter tali d = 14,2 adalah sebagai berikut :
S2 = 20,8 mm
C2 = 10,4 mm
Perencanaan Diameter Poros Puli
Diameter poros puli dapat dihitung dari persamaan :
P = d . L
Q
dimana :
P = Tekanan bidang pada puli yang tergantung pada kecepatan
keliling permukaan. Tekanan ini tidak boleh melibih harga –
harga yang tertera pada tabel di bawah ini.
Tabel 3.7. Tekanan Bidang Pada Puli
v (m/s) 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1,0 1,1 1,2 1,3 1,4 1,5
P (kg/cm2) 75 70 66 62 60 57 55 54 53 52 51 50 49 48 47
Untuk kecepatan = 1,5 m/s diperoleh P = 47 kg /cm
• •
2
L = Panjang bus tali (cm)
= (1,5 1,8) d ………. (Lit. 1 hal. 72)
= 1,8 . d (dipilih)
Q = Beban total puli
= Kapasitas lift + Berat Sangkar + Berat Bobot Pengimbang
= Berat Bobot Pengimbang = Berat Sangkar + 0,5 (Kapasitas)
= 650 + 0,5 (1050) = 1175 kg
= 1050 kg + 650 + 1165
maka :
Berdasarkan standarisasi diameter poros (Lampiran 22), diameter poros puli
penggerak yang dipergunakan adalah sebesar 60 mm. Poros puli penggerak dipilih
dari bahan Baja Karbon S 55 C-D G 3123 yang memiliki tegangan tarik izin σ1 = 85
kg / mm
Pemeriksaan Tekanan pada Alur Puli oleh Tali
2
Tekanan pada alur puli diasumsikan terdistribusi secara merata di seluruh
permukaan kontak antara tali baja dengan alur puli. Besarnya tekanan tersebut dapat
dihitung dari persamaan.
P1 ( / )
S = tegangan yang terjadi pada tali (kg)
= 3,55 mm
Agar perencanaan aman maka tekanan yang terjadi pada alur puli harus lebih
kecil dari tekanan izin. Tekanan izin pada alur puli dapat dihitung dari persamaan :
P1
K = faktor keamanan lift
= 9,5
Dari perhitungan sebelumnya diperoleh tekanan pada alur puli sebesar P1 =
0.049 kg/mm2, sedangkan tegangan izin alur puli P1 = 15,8 kg/mm2 sehingga alur
BAB IV
PERENCANAAN SISTEM TRANSMISI
4.1. PERENCANAAN DAYA MOTOR 4.1.1. Pemilihan Motor Penggerak
Sebelum menentukan reduksi dan dimensi pasangan roda gigi yang akan
dipergunakan pada sistem transmisi, maka terlebih dahulu harus ditentukan jenis
motor penggerak. Hal ini disebabkan karena besarnya putaran motor akan
menentukan besarnya reduksi yang harus dihasilkan oleh rangkaian roda gigi.
Disamping itu daya motor yang dipilih harus mencukupi kebutuhan daya yang
diperlukan bagi rangkaian lift.
Daya motor yang dibutuhkan untuk melayani kebutuhan sistem lift dapat
dihitung dari persamaan :
V = Kecepatan lift
Dalam prakteknya, perlu dilakukan pemeriksaan terhadap daya motor. Hal ini
dikarenakan dibutuhkannya daya yang besar pada sat start atau mungkin beban yang
besar yang terus bekerja setelah start. Dengan demikian perlu diperhitungkan adanya
faktor koreksi yang besarnya adalah : fc
. .
= 1,0 1,3 …….. (Lit. 4 hal. 7)
Dalam hal ini dipilih fc = 1,3.
Nd = fc . N
- Mudah diperoleh
st
= 1,3 . 14,23
= 15,5 hp
Adapun sumber daya yang dipilih disini adalah dari jala – jala listrik PLN
(AC). Hal ini dikarenakan beberapa alasan, yaitu :
- Konstruksi lebih sederhana sehingga lebih mudah dalam hal penempatannya
dan lebih hemat ruangan
- Putaran relatif konstan untuk beban yang berfluktuasi.
- Tidak menimbulkan polusi udara dan polusi suara.
- Lebih mudah distart.
Dalam perencanaan ini motor listrik yang dipilih memiliki 2 (dua) pasang
kutub (pole), dimasa setiap pasangnya terdiri dari 2 (dua) kutub. Maka putaran motor
dapat ditentukan dengan persamaan berikut :
ns (rpm)
= 2 pasang (direncanakan)
Jadi putaran motor listrik dalam perencanaan ini adalah n = 1500 rpm. Dari
standarisasi motor listrik AC untuk putaran 1500 rpm dan daya minimal 15,5 hp
diperoleh spesifikasi sebagai berikut :
Daya Motor (N) = 20 hp
Rated Speed (n) = 1460 rpm
Diameter Poros Penghubung (d) = 42 mm
Efisiensi (η) = 89,5 %
Faktor Daya (cos φ ) = 0,8
(Data lain dapat dilihat pada Lampiran 2)
4.1.2. Perencanaan Generator Set
Generator set adalah sebagai sumber arus listrik pada saat aliran listrik PLN
padam. Hal ini sangat penting supaya lift tetap dapat beroperasi dan hal – hal yang
tidak diinginkan akibat pemadaman arus listrik secara tiba – tiba oleh PLN tidak
terjadi. Generator set ini dirancang hanya untuk mengatasi beban listrik untuk kipas
dan penerangan lift serta untuk kebutuhan sistem lift itu sendiri sebanyak 6 unit di
Gedung Bank Sumut Medan.
Generator set yang dipilih harus dapat melayani keseluruhan unit lift beserta
peralatan pendukungnya berupa kipas dan penerangan. Maka KVA total yang harus
dilayani oleh Generator set adalah :
KVA total = KVA lift + KVA kipas dan penerangan
KVA lift =
KVA kipas dan penerangan diperoleh dari hasil survey sebesar 1 KVA
Maka
KVA total = 86,7 + 1
= 87,7 KVA
Dari perhitungan di atas maka direncanakan generator set dengan daya
keluaran sebesar 100 KVA, cos φ = 0,8 dan dihubungkan dengan jala –jala listrik
PLN dengan sistem sinkronisasi.
4.1.3. Pemeriksaan Motor terhadap Beban Lebih (Over Load)
Momen gaya yang dihasilkan motor ketika terjadi percepatan (momen gaya
start motor = Mmot) adalah :
Mmot = Mst + Mdyn ……… (Lit. 3 hal 296)
dimana :
Mst = momen tahanan statis
Mdyn (kgm)
δ = koefisien transmisi
= 1,1 . .
1,25 ……….. (Lit. 3 hal 293)
= 1,2 (dipilih)
GD2 = momen girasi komponen pada poros (rotor + kopling)
GD2 = GD2 rotor + GD2 kopling
G’ = berat netto maksimum yang diangkat motor
G’ = (Q + Gs) - Gcw (kg)
= (1050 + 650) - 1175 = 525 kg
Sehinggga :
Maka momen gaya start motor (Mmot) dapat dihitung berdasarkan persamaan
sebagai berikut :
Mrated
Pemeriksaan keamanan motor terhadap beban lebih (over load) didasarkan
pada rasiobeban – motor, yaitu perbandingan antara Momen Gaya Maksimum (Mmax)
dengan Momen Gaya Ternilai (Mrated). Jika perbandingannya lebih kecil dari harga
yang ditentukan, maka dapat disimpulkan bahwa motor aman terhadap beban lebih
atau dapat dituliskan :
Rasiobeban – motor max <1,75
Rasiobeban – motor
dimana :
Mmax = Momen Gaya Maksimum
= Mmot ……… (Lit. 3 hal 297)
= 8,2449 kg m
Mrated = Momen Gaya Ternilai
= 7,60 kg m
Sehingga :
Rasiobeban – motor
60 , 7
2449 , 8 =
= 1,085
Dari hasil pemeriksaan tersebut didapatkan bahwa nilai perbandingan antara
momen gaya maksimum dengan momen gaya ternilai (Rasiobeban-motor) = 1,085. nilai
ini masih berada dibawah nilai izin (Rasiobeban-motor (izin)) = 1,85 sehingga dapat
disimpulkan bahwa motor aman terhadap beban lebih (over load).
4.2. PERENCANAAN RODA GIGI CACING
Pada perencanaan lift ini untuk mereduksi putaran motor listrik digunakan
roda gigi cacing merupakan pasangan dari ulir cacing dan sebuah roda cacing yang
berkait pada ulir cacing.
Keuntungan penggunaan roda gigi cacing ini adalah dimungkinkannya
perbandingan transmisi yang besar yang mana tidak diizinkan oleh sistem roda gigi
lurus, serta cara kerjanya yang halus. Besar reduksi yang diizinkan dapat mencapai 1
: 100, tetapi arah transmisi pada sistem roda gigi cacing ini tidak dapat dibalik karena
Gambar 4.1. Sistem Transmisi Roda Gigi yang direncanakan
4.2.1. Putaran Puli (npuli)
Putaran puli dapat dihitung dengan menggunakan rumus :
npuli =
dimana :
V = kecepatan angkat
= 1,5 m/s = 90 m/min
dpuli = diameter puli
= 465 mm = 0,465 m
Maka :
npuli (rpm)
0,465 . 3,14
90 =
= 61,6 rpm
Jadi Perbandingan putaran yang harus direduksi oleh rangkaian roda gigi
cacing adalah :
i
= 61,6 1460
= 23,7
= 24 (ditetapkan)
4.2.2. Bagian – Bagian Utama Roda Cacing
Bagian – bagian utama roda cacing dapat dilihat pada Gambar 4.2 di bawah
ini.
Gambar 4.2. Bagian – bagian Utama Roda Cacing
b. Diameter jarak bagi cacing
c. Diameter inti cacing
d. Sudut kisar
e. Jarak bagi
f. Kisar
g. Tinggi gigi
h. Tinggi kepala
i. Tinggi kaki
j. Jarak sumbu
k. Diameter lingkaran kaki dari roda cacing
l. Diameter jarak bagi roda cacing
m. Diameter tenggorok roda cacing
n. Diameter luar ada cacing
o. Lebar roda cacing
4.3.2. Perencanaan Ukuran Roda Cacing
Data – data roda gigi cacing yang direncanakan adalah :
Daya Motor Listrik (N) = 20 hp = 15 KW
Transmisi Ratio (i) = 24 ; maka : ZI = i. Z2
1. Momen Puntir
= 24
Putaran Motor (n) = 1460 rpm
Selanjutnya akan dihitung ukuran – ukuran roda gigi cacing yang berdasarkan
data – data tersebut di atas.
TD = 9,74 x 105
P = daya yang dihasilkan oleh motor listrik
= 15 KW
Momen Puntir Poros Cacing (Tc)
TC
P = daya yang dihasilkan oleh motor listrik
nC = putaran pada poros cacing
Faktor Keamanan Sf1 : Sf2 = 2,15
Tegangan Geser Izin dapat dihitung dari :
τa
3. Diameter Poros
Diameter Poros Drum (ds2)
Diameter Poros Cacing (ds1)
ds2 xT (mm)
mn (mm)
Dp 25,4
= ………. (Lit. 4 hal 215)
dimana :
Dp = jarak bagi diameter (jumlah gigi per inch diameter)
= 2 (diambil, agak ukuran kompak) …. (Lit. 4 hal 216, Tabel 6.2)
5. Jumlah ulir gigi cacing (z1
Jumlah gigi roda cacing (z
) = 1
2) = 24
Sudut kisar (γ) = 14,50
6. Modul Aksial (m
(dipilih) Cacing dan poros merupakan satu kesatuan
Diameter Jarak Bagi Cacing (d1)
Diameter Jarak Bagi Roda Cacing (d2)
d2 = z2 . ms
10.Tinggi Kepala Gigi Cacing (hk
h
)
k
Beban tangensial yang terjadi pada roda cacing dapat dihitung dari :
Ft
=
Dalam perencanaan ini dipilih bahan untuk cacing dai Baja Karbon Tempa
SF50 dengan kekuatan tarik σa = 55 kg/mm2 sedangkan bahan untuk Roda Cacing
dipilih Besi Cor Kelabu dengan spesifikasi :
Tegangan lentur yang diizinkan (σba) = 5,5 kg
Y = 0,314 (Dipergunakan untuk dua arah putaran) ………(Lit.4 hal 279)
Selanjutnya beban lentur yang diizinkan bahan pada roda cacing (Fab) dapat
dihitung dari :
Fab = σba . be . hk . Y
= 5,5 . 54,02 . 1,7 . 0,314
= 1184,8 kg
Beban permukaan gigi yang diizinkan (Fac) dapat dihitung dari :
Fac = Ke . d2 . be . K
dimana :
= 0,035 kg / mm2 (Baja Celup Dingin) ……... (Lampiran 4)
Kγ = Faktor sudut kisar
= 1,25 (untuk γ = 100
– 150) …..…………. (Lit. 4 hal 280)
maka :
Fac = 0,035 . 314 . 54,02 . 1,25
= 742,1 kg
Seperti telah disebutkan terdahulu bahwa harga terkecil diantara (Fab) dan
(Fac) diambil sebagai Fmin = 742,1 kg. Disini harga Fmin lebih besar dari pada Ft
sehingga dapat disimpulkan bahwa roda cacing aman terhadap beban lentur.
4.2.4. Analisa Gaya Pada Roda Gigi Cacing
Gaya yang timbul pada roda gigi ini adalah gaya W seperti yang terlihat pada
gambar di bawah ini :
Gambar 4.3. Analisa Gaya Roda Gigi Cacing
Dari gambar di atas terlihat tiga komponen gaya orthogonal, yaitu :
Wx = W. Cos фn+ μ . cos λ
dimana :
W = gaya normal
Wx = gaya searah sumbu x
= gaya aksial pada poros cacing
Wy = gaya searah sumbu y
= gaya radial yang menyebabkan momen bengkok pada
poros cacing
Wz = gaya searah sumbu z
Gaya tangensial yang bekerja pada poros cacing
Pada kenyataannya terdapat gesekan antara cacing dengan roda cacing,
sehingga persamaan tersebut di atas menjadi :
Wx = W (cos фn . sin λ + μ . cos λ)
Untuk menghitung gaya – gaya di atas, maka terlebih dahulu dicari gaya
Nd = Daya motor rencana
= 15,5 hp
Vc
= π D
= kecepatan garis puncak
= π /Dp = 3,14/2 = 1,57
μ = Koefisien gesekan
Untuk menghitung koefisien gesekan terlebih dahulu harus
dihitung kecepatan luncur V
s-Gambar 4.4. Grafik Koefisien Gesek (μ) dan Kecepatan Luncur (Vs)
W =
Selanjutnya dapat dihitung ketiga komponen gaya orthogonal lainnya, yaitu :
Wx2 Wy2 dan W
z-Jadi gaya pada roda gigi cacing :
x
⇒ Gaya radial W
= 372,5 kg
y
⇒ Gaya tangensial W
= 350,3 kg
z
Berat roda gigi cacing (W
= 1338,7 kg
d2 = diameter jarak bagi roda cacing
= 314 mm
ds2 = diameter poros roda cacing / drum
= 66 mm
Wt (3142 662)44,08.7,8 10 6
Gaya radial yang terjadi pada roda gigi cacing (Wyt)
Wyt = Wy + W1
= 350,3 + 25,41
= 375,71
Berat puli penggerak (drum)
Puli penggerak dipilih dari bahan Besi Cor Kelabu yang memiliki massa jenis
p = 7,8 x 10-6 kg / m3 ………. (Lit. 3 hal 358)
Dari perhitungan sebelumnya telah diperoleh diameter puli penggerak
Dpuli = 465 mm
Tebal puli penggerak / drum (bpuli)
bpuli
W
= 1,8 d
= 1,8 . 66
= 119 mm
Bagian yang kosong diasumsikan 60 % dari keseluruhan volume drum/puli
penggerak, maka berat puli penggerak adalah 40 % dari berat total, sehingga :
2 = π (d12 – ds12) bpuli
Gaya terjadi pada puli penggerak (drum adalah gaya radial (Wy2), yang
besarnya dapat dihitung :
Wy2 ( ) 2{( 2)( )}cos30
2 2
2 cw s cw
s W G Q G W G
G
Q+ + + + + +
=
dimana :
Q = berat penumpang + berat tali baja
= 1050 kg + {(1,145 kg/m) x (70 m) x (4 buah)}
= 1370,6 kg
Gs = bobot sangkar
= 650 kg
Gcw = berat bobot pengimbang
= 1175 kg
W2 = berat puli
= 62 kg
Sehingga :
Wy2 = (1370,6+650+62)2 +1175+2{(1370+650+62)(1175)}0,866
= 3155, 1 kg
Jadi gaya radial yang terjadi pada puli penggerak (drum) adalah sebesar
3155,1 kg.
4.3. PERENCANAAN POROS
Poros merupakan salah satu bagian yang terpenting pada suatu konstruksi
mesin. Hampir semua jenis mesin menggunkan poros untuk meneruskan tenaga dan
Proses biasanya menerima beban lentur, tarikan, tekan dan putaran, yang
bekerja sendiri – sendiri ataupun gabungan satu dengan lainnya.
Pada perencanaan ini bahan poros roda cacing diambil dari baja yang
mempunyai kekuatan tarik 100 kg/mm2.
Pada perencanaan poros ini, hal – hal yang perlu diperhitungkan adalah :
analisa gaya – gaya yang bekerja pada poros, analisa gaya geser akibat gaya radial,
analisa momen lentur akibat gaya radial, analisa gaya geser akibat beban tangensial,
dan analisa momen lentur akibat gaya aksial.
4.3.1. Analisa Gaya pada Poros
∑ M∆ = 0
(Wyl . 200) – (RBy . 400) + (Wy2 . 580) = 0
(375,71 . 200) – (RBy . 400) + (3155,1 . 580) = 0
RBy = 4762,75 kg (ke atas)
∑ MB = 0
(RAy . 400) – (Wy1 . 200) + (Wy2 . 180) = 0
(RAy . 400) – (375,71 . 200) + (3155,1 . 180) – 0
4.3.1.1. Analisa Gaya Geser Akibat Gaya Radial
Gambar 4.6. Gaya Geser Akibat Gaya Radial pada Poros
Untuk 0 < x1 < 200
V11 = RAy
= - 1231,94 kg
Untuk 200 < X2 < 400
V12 = RAy = RAy – Wy1
= (- 1231,94) – 375,71
= 1607,65 kg
Untuk 0 < X3 < 180
V13 = Wy2
= 3155,1 kg
Untuk 180 < X4 < 380
Vl4 = Wy2 - RBy
= 3155,1 – 4762,75
4.3.1.2. Analisa Momen Lentur Akibat Gaya Radial
Gambar 4.7. Momen Lentur akibat Gaya Radial pada Poros
Untuk < X1 < 200
M (x) = RAy . (x) = (-1231,94) . (x)
M (0) = 0
M (200) = (- 1231.94) . (200)
= - 246388 kg mm
Untuk 200 < x2 400
M (x) = RAy . (x2) - Wy1 (x2 - 200)
= (- 1231,94) . x2 – { 375,71 (x2 – 200)}
= - 1607,65 x2 + 7542
M (200) = - 1607,65 (200) + 7542
= - 313988 kg mm
M (400) = - 1607,65 (400) + 7542
= 5934,35
Untuk 0 < x3 < 180
M(x) = - Wy2 . x3
M (180) = 3155,1 . 180
= 567918 kg mm
4.3.1.3. Analisa Gaya Geser Akibat Beban Tangensial
Gambar 4.8. Gaya Geser Akibat Gaya Tangensial
Untuk 0 <x , 200
V1.1 = RAz = RBz
2 Wz =
= 2
7 . 1338
= 669,35 kg
Untuk 200 < x < Wz
V1.2 = RAz - Wz
= 669,35 – 1338,7
= - 669,35 kg
4.3.1.4. Analisa Momen Lentur Akibat Gaya Aksial Untuk 0 < x < 200
M(x) = RAz . x
= 669,35 x
M (200) = 669,35 . 200
= 133870 kg mm
Untuk 200 < x < 400
M (x) = (RAz . x2) – Wz (x2 – 200)
= 669,35 . x2 – 1338,7 (x2 – 200)
= - 669,35 . x2 + 267740
M (200) = (- 669,35 . 200) + 267740
= - 13370 kg mm
M (400) = ( - 669,35 . 400) + 267740
= 0
Beban ekivalen di titik A :
RA eq Bz 2
2
By) (R )
(R +
=
= (4762,75)2 +(669,35)2
= 4809,55 kg
Momen lentur total di titik A adalah :
MAtot = RA eq . 200
= 1402,04 x 200
= 280408 kg mm
Momen lentur total di titik B adalah :
Mbtot = RB eq
Jadi momen lentur maksimum terjadi pada titik B yang besarnya adalah . 180
= 4809,55 x 180
Gambar 4.9.Diagram Gaya Geser Akibat Gaya Radial
4.4. PERENCANAAN BANTALAN
Bantalan dirancang untuk menerima beban radial murni, beban aksial murni
atau gabungan keduanya. Pada perencanaan ini, bantalan yang dipilih adalah
bantalan kerucut. Alasan pemilihan bantalan jenis ini adalah karena bantalan ini
dapat menahan kedua beban radial dan aksial atau setiap kombinasi dari keduanya.
Pada bantalan ini, meskipun beban aksial luar tidak ada, beban radial akan
menyebabkan suatu kemiringan kerucut tersebut.
Disamping alasan di atas, pemilihan bantalan jenis kerucut ini juga
dikarenakan sistem pelunasannya yang cukup sederhana. Dalam perencanaan ini
akan digunakan bantalan kerucut sebanyak 4 buah. Selanjutnya untuk perhitungan
bantalan, akan kita ambil bantalan B, karena gaya yang terjadi pada bantalan B lebih
besar dibandingkan gaya yang terjadi pada bantalan A.
Gambaran 4.14. Bantalan Rol Kerucut
Dengan demikian, dari perhitungan sebelumnya diperoleh beban ekivalaen
pada bantalan B (RB eq) adalah sebesar 4809,55 kg, sehingga untuk perhitungan
Untuk perhitungan selanjutnya dipakai bantalan rol kerucut dengan faktor beban v =
1 untuk pembebanan dengan cincin dalam yang berputar ..…… (Lit. 4 hal. 135) dan
faktor beban e = 0,35 ……… (Lampiran 19)
Beban ekivalen dinamis dapat dihitung dari persamaan :
P = X . v. Wr
Harga X dan Y pada persamaan di atas tergantung pada perbandingan
dengan harga e, seperti yang dapat dilihat pada tabel di bawah ini.
Tabel 4.1. Harga X dan Y dan Hubungannya dengan Harga e
e
Sehingga disini berlaku hubungan r
Maka beban ekivalen dinamis menjadi :
P = X . Wr + Y . W
= (1) . 4809,55 + (0) . 1338,7
Waktu pakai bantalan dapat dilihat pada Lampiran 21, dimana disini dipilih
umur nominal bantalan Lh = 5000 – 15.000 jam, maka faktor umur bantalan (fn)
dapat dihitung sebagai berikut :
fn
Faktor kecepatan dapat dihitung dari persamaan :
fn
dimana n = putaran poros = 1460 rpm
=
=
= 0,32
Harga Kapasitas Nominal Spesifik ( C) menjadi :
C =
= 32314,16 kg =317 kN
Dengan menyesuaikan bantalan rol kerucut dengan standarisasi ukuran pada
Lampiran 19 maka bantalan yang akan digunakan adalah bantalan kerucut dengan