Disusun Oleh:
DANANG DWI KRISTIYANTO
M0202020SKRIPSI
Diajukan untuk memenuhi sebagian
persyaratan mendapatkan gelar Sarjana Sains Fisika
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SEBELAS MARET
SURAKARTA
Juli, 2009Pembimbing I Pembimbing II
Drs. Syamsurizal NIP. 19561212 198803 1 001
Artono Dwijo Sutomo, S.Si.,M.Si. NIP. 19700128 199903 1 001
Dipertahankan di depan Tim Penguji Skripsi pada :
Hari : Selasa
Tanggal : 21 Juli 2009
Anggota Tim Penguji :
1. Dr. Eng. Budi Purnama, S.Si., M.Si. (...) NIP. 19731109 200003 1 001
2. Utari, S.Si., M.Si. (...)
NIP. 19701206 200003 2 002
Disahkan oleh:
Jurusan Fisika
Fakultas Matematika dan Ilmu Pengetahuan Alam
Universitas Sebelas Maret Surakarta
Dekan F MIPA UNS
Prof. Drs. Sutarno, M.Sc., Ph.D. NIP. 19600809 198612 1 001
Ketua Jurusan Fisika
Drs. Harjana, M.Si., Ph.D. NIP. 19590725 198601 1 001
PERALATAN AKUISISI DATA GPS BERBASIS MIKROKONTROLER
AT89S51” belum pernah diajukan untuk memperoleh gelar kesarjanaan di suatu
perguruan tinggi, dan sepanjang pengetahuan saya juga belum pernah ditulis atau
dipublikasikan oleh orang lain, kecuali yang secara tertulis diacu dalam naskah ini
dan disebutkan dalam daftar pustaka.
Surakarta, 28 Mei 2009
DANANG DWI KRISTIYANTO
ABSTRAK
Penelitian-penelitian di bidang Fisika banyak yang membutuhkan data posisi sebagai data pendukung. Telah didesain dan dibuat peralatan akuisisi data GPS yang terdiri dari sensor Leadtek EG-T10, pengubah TTL-RS232, mikrokontroler AT89S51 dan LCD Hitachi 16x2. Akuisisi data GPS telah berhasil dilakukan, dan dapat dilihat pada tampilan LCD. Rata-rata prosentase error sensor EG-T10 dibandingkan piranti Garmin GPSmap 60CSx bervariasi antara 0,23-5,22 %.
Kata kunci: AT89S51, GPS
ABSTRACT
Various researches in Physics need position as a secondary data. A GPS data acquisition system have been designed and built which consist of Leadtek’s EG-T10 sensor, TTL-RS232 Converter, AT89S51 microcontroller and 16x2 version of Hitachi LCD. The acquisition of the GPS data have been succeeded, the result is displayed on a LCD. The result’s mean error percentage compared to Garmin GPSmap 60CSx handheld were varied between 0,23 to 5,22 %.
Key words: AT89S51, GPS
Son and to Momma Shkhinah, my Immayah*
*Father, i have only small, but i give it all, to You*
*I’m nothing but the dust*
*"I adore You, the Great One, The Great "I AM", Bless be your name, Yahveh forever, let my face be forced to bow down before your throne !! Let me counted
worthy to escape the tribulation that happen soon, to escape Your wrath. Oh my father."*
Shallom alehim,
Puji Tuhan, akhirnya saya bisa menyelesaikan skripsi saya ini yang
berjudul ” DESAIN PERALATAN AKUISISI DATA GPS BERBASIS
MIKROKONTROLER AT89S51”, walaupun menghadapi banyak kebingunan
dan putus asa, namun kalau Dia berkata ”dalam kelemahanmu menampakkan
kekuatan-Ku” maka itulah yang saya amini.
Penulis menyadari sepenuhnya bahwa dalam menyelesaikan skripsi ini
penulis melibatkan bantuan banyak pihak, hanya ungkapan terima kasih yang
dapat penulis ucapkan kepada:
1. Bapak Prof. Drs. Sutarno, M.Sc., Ph.D., selaku Dekan FMIPA Universitas
Sebelas Maret.
2. Bapak Drs. Harjana, M.Si., Ph. D., selaku Ketua Jurusan Fisika FMIPA
Universitas Sebelas Maret.
3. Bapak Drs. Cari, M.A., Ph.D. selaku pembimbing akademik.
4. Bapak Nuryani, M.Si. selaku pembimbing skripsi sebelum beliau pergi
melanjutkan studi S3 di Australia. Terima kasih atas perhatian, kesabaran
dan bimbingannya selama ini.
5. Bapak Drs. Syamsurizal, karena bersedia membimbing saya sebagai
pengganti Bapak Nuryani.
6. Bapak Artono Dwijo Sutomo,S.Si,M.Si karena bersedia menjadi
pembimbing II di saat-saat akhir.
7. Bapak Marzuki, S.Si.,Ph.D. yang membantu mencarikan pembimbing.
8. Bapak Darsono, S.Si,M.Si. untuk peminjaman piranti GPS Garmin
GPSmap 60CSx.
9. Bapak dan Ibu staff pengajar di Jurusan Fisika maupun dari luar Jurusan
Fisika Universitas Sebelas Maret atas kuliah-kuliah yang saya terima.
menyelesaikan skripsi. Maaf saya kelamaan lulusnya.
12.Teman-teman pelayanan Komisi Pemuda GKJ Karanganyar yang memberi
perhatian dan mendoakan supaya saya segera lulus.
13.Mas Sigit dan Mas Yohanes yang menjadi pembimbing rohani saya
selama 10 tahun ini. Terima kasih atas keluh kesahmu di hadapan Tuhan.
14.Teman-teman dari Micron Labs, Inc. Terima kasih atas dukungannya
menjadi penerus kelompok studi mikrokontroler.
15.Kaum Bodongers yang menjadi sumber keceriaan, dan juga kaum
Nekaters yang suka menyembunyikan sandal saya di tempat sampah.
Terima kasih Aris telah membantu saya mengeringkan air dari lampu
motor saya.
16.Sriyono, yang membantu banyak programming Delphi dan juga antar
muka serial.
17.Mas Novi atas pinjaman handycamnya untuk dokumentasi. 18.Agus Sepur atas miniDV dan Capture Card Firewirenya. 19.Yoga, atas pinjaman kamera digitalnya dan atas printernya.
20.Seluruh adik angkatan, dari 2003 sampai 2008 dst. Semoga ku kenal
kalian lewat Facebook kalo tidak bertemu muka.
21.Kepada yang terkasih yang menjadi sumber semangat. Just wait a little longer, soon we will met.
Dan semua pihak lain yang tidak dapat penulis sebutkan satu persatu.
Kiranya Tuhan membalas kebaikan kalian semua.
DANANG DWI KRISTIYANTO
HALAMAN PENGESAHAN ... ii
HALAMAN PERNYATAAN.. ... iii
HALAMAN ABSTRAK... iv
HALAMAN ABSTRACT ... v
HALAMAN MOTTO... vi
KATA PENGANTAR ... vii
DARTAR ISI ... x
DAFTAR TABEL... xii
DAFTAR GAMBAR ... xiv
DAFTAR LAMPIRAN... xvii
BAB I PENDAHULUAN ... 1
A. LATAR BELAKANG MASALAH... 1
B. PERUMUSAN MASALAH ... 3
C. TUJUAN PENELITIAN ... 3
D. MANFAAT PENELITIAN... 3
BAB II KAJIAN PUSTAKA ... 4
A. GPS ... 4
B. TRILATERATION ... 5
C. PEMBAGIAN SISTEM GPS... 9
C.1. SISTEM ANGKASA ... 10
C.2. SISTEM KENDALI ... 15
C.3. PEMAKAI... 17
D. PROTOKOL GPS ... 17
E. SINYAL DAN FREKUENSI GPS... 32
E.1. SINYAL JARAK... 33
E.2. SINYAL NAVIGASI ... 34
E.3. GELOMBANG PEMBAWA ... 37
E.4. PENSINYALAN TAMBAHAN ... 40
E.4.1. SINYAL L2C... 40
E.4.2. PESAN NAVIGASI CNAV ... 41
J. PENGUBAH LOGIKA TTL-RS232 ... 49
K. LIQUID CRYSTAL DISPLAY (LCD). ... 51
L. PEMROGRAMAN... 52
L.1. PROGRAM EDITOR M-IDE STUDIO FOR MCS-51 53 L.2. PROGRAM SIMULASI AVSIM51... 53
L.3. PROGRAM DOWNLOADER DT-51 WINDOWS DOWNLOADER ... 54
BAB III. METODOLOGI PENELITIAN... 56
A. TEMPAT DAN WAKTU PENELITIAN ... 56
A.1. TEMPAT PENELITIAN ... 56
A.2. WAKTU PENELITIAN... 56
B. ALAT DAN BAHAN PENELITIAN ... 56
C. RANCANGAN ALAT... 56
D. TAHAPAN PENELITIAN ... 58
D.1. PENGUJIAN KINERJA PENGUBAH TTL-RS232.... 59
D.2. PENGUJIAN AKUISISI DATA SENSOR GPS EG-T10 60 BAB IV. HASIL PENELITIAN DAN PEMBAHASAN ... 66
A. PENGUJIAN KINERJA PENGUBAH TTL-RS232... 66
B. PENGUJIAN AKUISISI DATA SENSOR GPS EG-10... 67
BAB V. KESIMPULAN DAN SARAN... 73
DAFTAR PUSTAKA... 74
LAMPIRAN... 77
Tabel 2. Keterangan kode GGA (Baddeley, 2001.)... 20
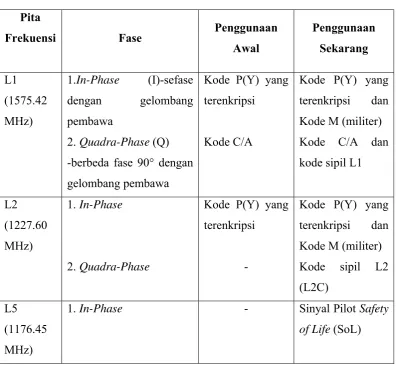
Tabel 3. Pita Frekuensi GPS... 33
Tabel 4. Tingkat Tegangan RS-232 (Bies, 2009)... 46
Tabel 5. Panjang Kabel dari Standar RS232 menurut Texas
Instrument (Bies, 2009)... 46
Tabel 6. Alamat Serial Port Control Register... 48 Tabel 7. Penghitungan Baudrate komunikasi serial... 49 Tabel 8. Nilai dan Konfigurasi Baud Rate pada Register MCS51.... 49 Tabel 9. Hasil Akuisisi Data GPS di Area Parkir Gedung B FMIPA
UNS... 68
Tabel 10. Hasil Akuisisi Data GPS di Area Boulevard Kampus UNS 68
Tabel 11. Hasil Akuisisi Data GPS di Area Gerbang Belakang Kam-
pus UNS... 69
Tabel 12. Hasil Akuisisi Data GPS di Desa Temon, Karanganyar... 69
Gambar 2. Trilateration... 5
Gambar 3. Prinsip dasar penentuan posisi dengan GPS... 8
Gambar 4. Right Ascension... 10
Gambar 5. Celestial Sphere... 10
Gambar 6. Sidereal Day vs Mean Solar Day... 11
Gambar 7. Satelit-satelit yang aktif selama 24 jam di wilayah Johor Bahru, Malaysia pada Januari 1998 (warna kuning menunjukkan satelit yang bisa dipakai pada suatu jam tertentu) 13
Gambar 8. Satelit GPS blok IIR dan Jaringan Orbit Satelit GPS... 15
Gambar 9. Posisi Stasiun Kendali Jaringan GPS di seluruh dunia... 16
Gambar 10. Stasiun Pelacak Satelit GPS yang terletak di Hawaii... 16
Gambar 11. Skwadron Pengendali Jaringan GPS di Colorado... 16
Gambar 12. Sensor GPS versi OEM berdasar chip SiRF Star III dan banyak digunakan dalam produk komersial, berukuran 12 x 15 mm... 17
Gambar 13. Alat Penerima GPS... 17
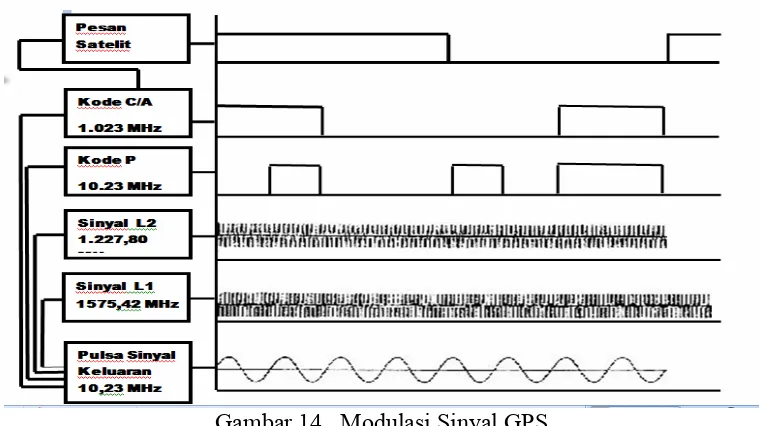
Gambar 14. Modulasi Sinyal GPS... 33
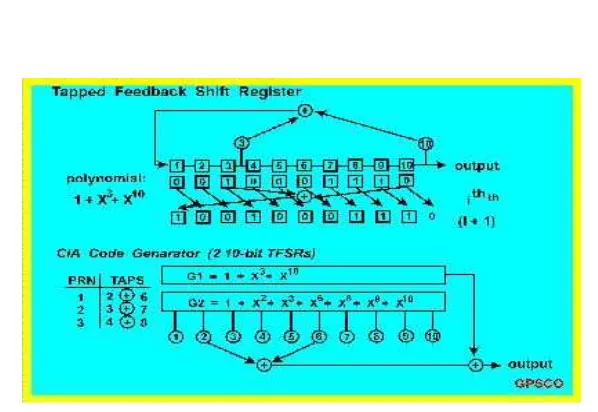
Gambar 15. Pembuatan PRN... 34
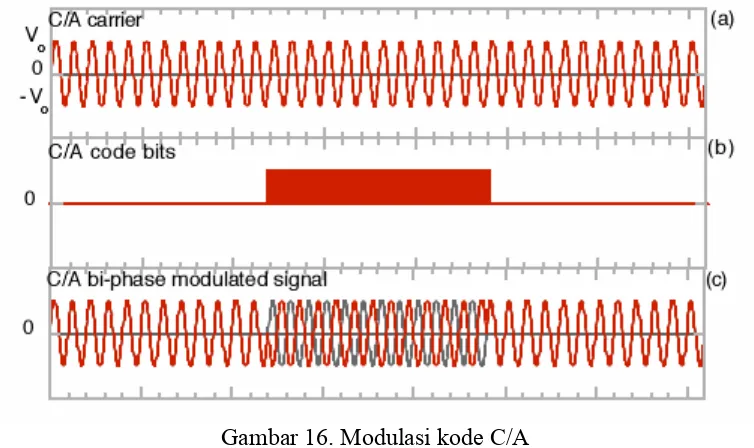
Gambar 16. Modulasi kode C/A ... 35
Gambar 17. Modulasi kode P... 36
Gambar 18. Gelombang pembawa, sinyal jarak dan sinyal navigasi. 38 Gambar 19. Modulasi gelombang pembawa dengan data yang dibawanya... 39
Gambar 20. Modulasi kode C/A dan P... 39
Gambar 21. Sensor GPS versi OEM, ELINK EG-T10... . 42
Gambar 23. Diagram blok dari arsitektur internal AT89S51... 44
Gambar 24. DT-51 Minimum System versi 3.3 buatan Innovative ElectronicsTM... 46
Gambar 25. Beragam Tingkat Tegangan dari Logika-logika IC... 50
Gambar 26. IC MAX232 dan Diagram Internalnya... 51
Gambar 27. Teknologi LCD... 52
Gambar 28. Tampilan Program M-IDE Studio for MCS-51... 53
Gambar 29. Tampilan Progam AVSIM51... 54
Gambar 30. Program DT-51 Windows Downloader... 55
Gambar 31. Diagram Rancangan Perangkat Keras... 57
Gambar 32. Tahapan-tahapan Penelitian... 58
Gambar 33. Perubahan Tegangan TTL-RS232 Sefase... 59
Gambar 34. Pengubah TTL-RS232 Berbasis MAX232... 60
Gambar 35. Rangkaian Penguji Kinerja Pengubah TTL-RS232... 60
Gambar 36. Desain Rangkaian Pengujian Sensor GPS dengan Osiloskop... 61
Gambar 37. Desain Rangkaian Pengujian Sensor GPS dengan Komputer... 61
Gambar 38. Tampilan LCD yang diharapkan dari data GPS. T1105.. berarti bujur timur 110,5°. S0733 berarti lintang selatan 07°33” yang menunjukkan posisi kampus UNS... 62
Gambar 39. Algoritma mendeteksi data GPS yang diperlukan dan menampilkan data tersebut ke LCD... 63
Gambar 40. Hasil Perbandingan Data Masukan TTL dan Keluaran RS232 dari Pengubah TTL-RS232... 66
Gambar 41. Hasil Pengujian berfungsinya sensor GPS yang diperli- hatkan oleh layar Osiloskop... 67
Gambar 43. Perbandingan Data Lintang Area Parkir……... 69
Gambar 44. Perbandingan Data Bujur Desa Temon... 73
Lampiran 2. Hasil Akuisisi Data GPS di Area Boulevard Kampus UNS 79
Lampiran 3. Hasil Akuisisi Data GPS di Area Gerbang Belakang Kam-
pus UNS... 81
Lampiran 4. Hasil Akuisisi Data GPS di Area Desa Temon, Karanganyar 83
Lampiran 5. Perbandingan Besaran Posisi GPS (Derajat, Menit, Detik)
dan Besaran Meter... 85
Lampiran 6. Program Assembler MinSys untuk Membaca Data dari
Sensor EG T10... 86
BAB I
PENDAHULUAN
A. LATAR BELAKANG MASALAH
Dalam semua jenis transportasi, terdapat kebutuhan yang mendasar untuk
meyakini di manakah posisi yang sebenarnya. Dalam sistem transportasi darat
dipergunakan tanda-tanda alami seperti gunung, pepohonan, sungai,
batu-batuan, matahari dan sebagainya. Dalam sistem transportasi laut tidak ada
tanda-tanda alami seperti di daratan yang bisa dipakai. Karena itu
dikembangkan sistem pendugaan posisi atau sistem navigasi yang lebih bisa
diandalkan. Tanda-tanda alami yang bisa dipergunakan sebagai acuan sistem
navigasi di laut antara lain bintang, matahari dan bulan. Ditambah dengan
kepercayaan masyarakat masa lalu kepada benda-benda langit sebagai
dewa-dewa yang mempengaruhi hidup mereka maka berkembanglah ilmu astronomi
dan astrologi.
Sistem navigasi yang berdasarkan benda-benda langit ini juga disebut
celestial navigation (Umland, 2006). Sistem ini mempergunakan metode pengukuran sudut antara bidang horisontal dengan suatu benda langit yang
sudah dikenal sebelumnya. Mataharilah yang paling sering dijadikan acuan,
namun bagi para mualim yang terlatih mereka dapat mempergunakan bulan,
planet atau salah satu dari bintang-bintang yang terdaftar pada almanak
kelautan yang jumlahnya mencapai 57 buah. Peralatan yang dipakai untuk
melakukan pengukuran ini disebut sextant. Dari berbagai pengukuran ini akan diperoleh tiga buah lingkaran yang perpotongan garisnya menunjukkan posisi
dari kapal tersebut.
Sistem navigasi satelit yang paling populer adalah sistem GPS milik
militer Amerika Serikat yang memperbolehkan pemakaiannya untuk
keperluan sipil. Di kalangan dunia ilmu dasar, sistem GPS dipergunakan
antara lain untuk memantau penyebaran hewan-hewan langka seperti gajah,
paus dan hiu. Yaitu dengan menempelkan sensor-sensor pemancar pada tubuh
hewan-hewan tersebut. Demikian juga di bidang Geofisika, data-data fisis
seperti resistivitas, medan magnet akan dihubungkan dengan posisi titik-titik
yang diambil datanya.
Oleh karena itu perlu dibuat sebuah sistem pemantau posisi benda
berbasis sistem GPS yang juga mentransferkan data tersebut ke pengamat
yang berada di tempat lain. Sistem yang akan dibuat nanti diharapkan juga
dapat diterapkan sebagai sebuah sistem telemetri untuk bermacam-macam
sensor.
Gambar 1. Skema Sistem Akuisisi dan Transmisi Data GPS
Sensor GPS akan mengeluarkan data posisi (bujur, lintang) yang
diterimanya dari satelit GPS. Data ini berupa data digital dengan format
ASCII dan dikeluarkan dengan sistem komunikasi serial TTL. Data ini akan
diolah oleh MinSys, namun karena sistem komunikasi serial yang dapat
diterima oleh MinSys adalah RS232 maka antara keduanya haruslah terdapat
pengubah tegangan TTL-RS232 yang biasanya berbasis MAX232 (Webster,
2009).
Data yang berasal dari TTL-RS232 Converter akan diterima oleh MinSys yang kemudian akan disimpan di dalam memori internalnya. Data
yang tersimpan di dalam memori ini akan dikeluarkan ke tampilan LCD dan
juga ditransferkan ke port 1 yang akan meneruskannya ke MinSys kedua,
MinSys kedua inilah yang akan mengirimkan data tersebut ke HP
TTL-RS232 Converter. HP akan mengirimkan data-data GPS ke HP lain dengan SMS. Proses pengiriman SMS ini akan diatur oleh MinSys kedua
dengan protokol AT Command (Widians,2009). B. PERUMUSAN MASALAH
Masalah akan dirumuskan meliputi:
a. Bagaimana membuat piranti akuisisi data GPS berbasis mikrokontroler
AT89S51 dan hasilnya ditampilkan ke LCD.
C. TUJUAN PENELITIAN
Penelitian ini bertujuan untuk:
a. Pembuatan suatu peralatan sistem pemantauan posisi berbasis GPS yang
dapat dipakai secara praktis .
D. MANFAAT PENELITIAN
Manfaat dari penelitian ini adalah:
a. Penelitian yang memerlukan data posisi dapat memperoleh data tersebut
dari peralatan yang dibuat.
b. Pemakaian AT89S51 akan memberikan kesempatan untuk penambahan
BAB II
KAJIAN PUSTAKA
A. GPS
System GPS merupakan kepanjangan dari Global Positioning System dan satu-satunya sistem navigasi satelit (Global Navigation Satellite System, GNSS) yang dapat dipakai di seluruh dunia (Commissioners of Irish Lights, 2008).
Beberapa negara mengembangkan sistem serupa namun bersifat regional saja atau
belum berfungsi penuh. Misalnya sistem Beidou yang dikembangkan China,
sistem Galileo yang dikembangkan oleh Uni Eropa yang didukung juga oleh
China, Israel, India, Maroko, Arab Saudi, Korea Selatan dan Ukrania yang
direncanakan dapat beroperasi mulai tahun 2010. Ada juga sistem GLONASS,
milik Rusia yang menjalani perbaikan bekerja sama dengan India. India sendiri
mempunyai sistem navigasi satelit bernama Indian Regional Navigational Satellite Sistem (IRNSS). Apabila kata GPS diterjemahkan berarti sistem penentuan letak benda yang dapat digunakan di seluruh dunia. Sistem ini
mempergunakan minimal 24 buah satelit berorbit menengah yang terus-menerus
memancarkan gelombang elektromagnetik yang oleh penerimanya digunakan
untuk menentukan lokasi, kecepatan dan arahnya. Sebenarnya terdapat 30 satelit
yang dipakai, namun enam (6) satelit dipergunakan sebagai cadangan kalau ada
satu atau beberapa satelit yang gagal berfungsi (Kastenholz, 2007).
GPS telah menjadi alat bantu navigasi yang digunakan di seluruh dunia.
GPS juga menjadi alat yang sangat berguna dalam pembuatan peta, survei lahan,
aplikasi komersial, apalagi dalam penerapan ilmu sains. GPS dapat juga
digunakan sebagai referensi waktu yang akurat yang dipakai dalam penelitian
gempa bumi dan sinkronisasi jaringan telekomunikasi (Moore, 1995).
B. TRILATERATION
Penerima sinyal GPS menghitung posisinya dengan mengukur
jarak dirinya dengan tiga atau lebih satelit GPS. Pengukuran jeda waktu antara
pengiriman dan penerimaan sinyal dari tiap sinyal GPS akan memberikan
jaraknya dengan masing-masing satelit, karena dari satelit. Dengan mengetahui
lokasi dan jarak dari minimal tiga satelit maka penerima sinyal GPS dapat
menentukan posisinya dengan metode yang disebut trilateration (Kaminsky, 2007).
Apabila penerima berada pada posisi B, maka dapat dihitung posisinya
Gambar 2. Trilateration
berdasarkan titik referensi P1, P2 dan P3 pada bidang dua dimensi.
Dengan mengukur r1 dapat diperoleh informasi posisi dalam bentuk lingkaran,
lalu dengan mengukur r2 informasi posisi menjadi lebih akurat yaitu dua buah
titik A dan B. Pada pengukuran yang ketiga yaitu r3 memberikan koordinat pada
B. pengukuran yang keempat juga dapat dilakukan untuk mengurangi ralat
pengukuran.
mempergunakan dua atau lebih titik referensi dan jarak antara benda terhadap
masing-masing titik referensi. Untuk memperoleh data posisi benda yang akurat
pada bidang 2D minimal diperlukan tiga titik referensi.
Penurunan matematis dari trilateration pada bidang tiga dimensi bisa diperoleh dengan pemodelan yaitu tiga buah bulatan yang berdekatan seperti pada
gambar 2. Ada tiga batasan yang diterapkan pada model ini, pertama, ketiga
lingkaran tersebut haruslah berada pada bidang z = 0, kedua, salah satu titik referensi haruslah menjadi titik origin / titik pusat koordinat, ketiga, salah satu titik referensi haruslah berada pada sumbu x. Namun dapatlah dipilih tiga buah
titik sembarang, lalu mencari titik B, lalu dicari posisi b pada koordinat yang
ditetapkan.
Dengan tiga buah persamaan bola
2
Dengan mengurangkan persamaan 1 dengan persamaan 2 :
d
Kemudian nilai x disubtitusikan ke persamaan bola yang pertama dan diperoleh
persamaan lingkaran yang pertama
Dari persamaan 1 dan persamaan 3 dicari nilai y (persamaan 1 dikurangi
Nilai z bisa diperoleh dengan menyusun persamaan 1 sehingga
2
Sehingga diperoleh nilai ketiga titik x, y dan z. Dan karena nilai z berbentuk akar
kuadrat maka kemungkinan nilai-nilai penyelesaiannya adalah nol, tunggal
maupun dua buah nilai penyelesaian. Visualisasi dari pencarian nilai akar-akar
kuadrat ini bisa digambarkan dengan membentuk lingkaran yang berasal dari
irisan dari dua buah bulatan bola yang diiriskan terhadap bulatan bola ketiga. Jika
keliling lingkaran itu berada di luar bola ketiga berarti nilai z merupakan akar
kuadrat dari sebuah nilai negatif, tidak terdapat nilai penyelesaian yang real.
Apabila keliling lingkaran menyentuh bulatan bola tepat pada satu titik maka z
pastilah nol. Jika keliling lingkaran itu menyentuh permukaan bulatan bola pada
dua titik maka nilai z merupakan dua buah nilai positif dan negatif dari akar
kuadrat suatu bilangan positif.
Peralatan penerima GPS dapat menentukan posisinya dengan mengetahui
posisi dari minimal 3 buah satelit dan jarak dari masing-masing satelit ke
tiga dimensi. Satelit dan penerima sama-sama menjalankan suatu kode (PRN) lalu
menerima waktu jeda antara sinyal satelit dan sinyal internalnya, jeda inilah yang
digunakan untuk menghitung jarak.
Gambar 3. Prinsip dasar penentuan posisi dengan GPS
Penentuan posisi sistem GPS menggunakan dua metode:
1. Metode Absolut (Point Positioning) 2. Metode Relatif (Differential Positioning)
Metode Absolut di dasarkan pada datum WGS’84 (World Geodetic System ’84) (Hana,1995) yang merupakan almanak ketinggian permukaan bumi yang
telah diukur yang mencakup seluruh permukaan bumi. WGS’84 terakhir direvisi
pada tahun 2004 dan akan berlaku resmi sampai tahun 2010. Titik pusat dari
datum ini adalah pusat massa bumi yang dihitung dengan ketelitian minimal 2 cm.
Didasarkan pada Earth Gravitational Model 1996 yang dikembangkan oleh NIMA (National Imaginery and Mapping Agency), GSFC (NASA Goddard Space
Flight Center) dan Ohio State University. Titik-titik ketinggian ini disebut geoid. Dengan menggunakan empat titik pada kisi-kisi sesuai datum WGS’84 dapat
ditentukan ketinggian suatu benda berdasarkan teknik interpolasi (Hana, 1995).
Metode Relatif tidak hanya menggunakan satelit namun juga stasiun darat
Metode absolut akan memberikan ketajaman pengukuran sebesar 5 meter,
sedangkan metode relatif dapat memberikan ralat pengukuran sebesar 1 meter.
Kesalahan penentuan posisi berdasarkan sistem GPS disebabkan antara lain:
1. Adanya multipath, yaitu sinyal satelit yang diterima oleh penerima GPS melewati dua jalur atau lebih sehingga terjadi bias. Hal ini bisa terjadi jika penerima berada pada lokasi yang berdekatan dengan sistem transmisi daya tegangan tinggi, benda reflektif, gedung tinggi dsb.
2. Selective Availability (SA), merupakan filtering untuk mengacak sinyal satelit, dilakukan dengan sengaja oleh militer AS sehingga pihak sipil yang menggunakan GPS tidak memperoleh data yang akurat. SA tidak berlaku bagi penerima GPS yang dipakai militer AS. Namun SA bisa dikurangi dengan metode relatif. Pada Mei 2000 SA dihapuskan karena mendapat keberatan dari pihak penerbangan sipil yang menghendaki ketepatan posisi dalam navigasinya.
3. Untuk posisi yang diplot ke peta dapat terjadi ketidaksinkronan parameter-parameter peta dan setting parameter pada penerima.
4. Keterlambatan sinyal karena melewati ionosfer dan troposfer, ionisasi pada lapisan ini mengganggu sinyal GPS.
5. Ephemeris Errors, kesalahan orbit satelit GPS dibandingkan dengan datum WGS’84 yang terdapat pada penerima, terjadi jika terdapat pergeseran orbit satelit.
6. Posisi relatif satelit/gangguan sisi miring. Hal ini terjadi jika posisi satelit terletak pada sudut yang sangat lebar atau sangat dekat atau hamper berhimpitan satu sama lain sehingga perhitungan ketepatan berkurang.
C. PEMBAGIAN SISTEM GPS
Sistem GPS terdiri dari tiga pembagian kerja : sistem angkasa (SS, Space Segment)(Kowoma, 2007), sistem kendali (CS, Control Segment) dan pemakai (US, User Segment).
C.1. SISTEM ANGKASA
Sistem Angkasa terdiri dari satelit-satelit GPS yang mengorbit, yang
sering disebut juga Space Vehicle (SV), Sistem GPS memerlukan 24 SV yang disebar dalam enam bidang orbit yang sama, keenam bidang orbit tersebut
mempunyai sudut inklinasi sebesar kira-kira 55° (relatif terhadap ekuator bumi)
dan saling terpisah dengan jarak sebesar 60° right ascension pada ascending node.
Gambar 4. Right Ascension
Gambar 5. Celestial Sphere
Right Ascension (disingkat RA, disimbolkan α) merupakan istilah astronomis yang artinya setara dengan garis bujur bumi (terestial) namun berada
pada bulatan celestial (gambaran imajiner dari bola dengan radius sangat besar, yang pusatnya sama dengan pusat bumi, tiap benda dianggap mengapung pada
equinox/vernal equinox ke arah timur. Satuan dari RA biasanya jam, menit dan detik, dengan syarat nilai 24 jam berarti satu lingkaran penuh. Alasan dari
pemilihan satuan ini adalah karena fakta bahwa bumi berotasi dengan periode
yang relatif konstan (mean solar day dan sidereal day hanya terpaut 0,997). Oleh karena itu satu jam Right Ascension setara dengan 15° busur, satu menit Right Ascension setara dengan 15 menit busur dan satu detik Right Ascension setara dengan 15 detik busur. RA bisa digunakan untuk menentukan posisi suatu bintang
dan berapa lama waktu yang ditentukan oleh bintang itu untuk mencapai suatu
titik di langit. Misalnya, jika sebuah titik meridian mempunyai RA sebesar
01:30:00 maka sebuah bintang dengan RA=20:00:00 akan berada pada titik
meridian itu setelah 18,5 jam sidereal kemudian.
Gambar 6. Sidereal Day vs Mean Solar Day
Sidereal Day merupakan ukuran rotasi bumi terhadap kerangka acuan selain sumbu bumi berdasar fakta bahwa bintang-bintang yang terlihat dari bumi
berotasi pada suatu sumbu setiap 25.800 tahun (Adams, 2005). Saat bumi berada
pada posisi 1, matahari dan suatu bintang di langit sama-sama berada di sebelah
tidak. Waktu antara posisi 1 dan posisi 2 adalah Sidereal Day sedangkan waktu antara posisi 1 dan posisi 3 adalah Mean Solar Day (hari matahari). Perbedaan Sidereal Day dan Mean Solar Day adalah 365.25/366.25 atau 0,997(3 menit, 56 detik).
Satelit-satelit GPS berada pada ketinggian kira-kira 20.200 km (12.600 mil
atau 10.900 mil laut) dan radius orbit 26.600 km sehingga setiap Sidereal Day satelit akan mengitari bumi sebanyak dua kali sehingga akan melalui suatu tempat
di bumi sebanyak dua kali tiap hari. Keseluruhan orbit satelit diatur sedemikian
sehingga di manapun di muka bumi akan selalu ada minimal 6 satelit yang bisa
dipergunakan. Sejak april 2007 ada 30 buah satelit yang dipergunakan oleh sistem
GPS, satelit-satelit tambahan tersebut dipergunakan untuk menambah ketelitian
pengukuran dan juga sebagai satelit cadangan jika ada satelit yang tidak berfungsi.
Terdapat lima kelompok satelit GPS yang pernah diluncurkan. Terdiri dari
: blok I, blok II, blok IIA,blok IIR dan blok IIR-M. Satelit-satelit blok I terdiri dari
11 satelit yang diluncurkan antara tahun 1978-1985 yang dipergunakan untuk
melakukan ujicoba sistem GPS, terletak pada orbit dengan inklinasi 63 derajat,
namun tidak ada satupun dari satelit ini yang berfungsi. Satelit pada blok II terdiri
dari 9 satelit yang menjadi generasi pertama sistem GPS yang beroperasi. Satelit
blok II, IIA dan IIR terletak pada orbit dengan inklinasi 55 derajat. Dari 27 satelit
blok II, IIA dan IIR , 24 satelit merupakan satelit utama sedangkan sisanya
merupakan cadangan yang berada pada orbit sedemikian sehingga dapat segera
menggantikan satelit utama yang mengalami kegagalan fungsi. Sebenarnya sistem
GPS dapat beroperasi sejak akhir tahun 1980an namun terjadi penundaan karena
berbagai hal diantaranya tragedi pesawat ulang alik Challenger (28 Januari 1986)
sehingga baru dapat beroperasi penuh pada tahun 1994 dengan 24 satelit blok II
dan IIA.
Pada tahun 2005 diluncurkan satelit blok IIR-M yang merupakan
pembaharuan dari satelit-satelit blok IIR dengan penambahan kemampuan
memancarkan sinyal L2C untuk keperluan sipil yang ditambahkan pada sinyal L2
dan sinyal militer (kode M) yang ditambahkan pada sinyal L1 maupun L2. Namun
akan diluncurkan satelit baru blok IIF dengan tambahan sinyal L5 (SoL : Safety of Life) untuk pemakaian sipil.
Gambar 7. Satelit-satelit yang aktif selama 24 jam di wilayah Johor Bahru, Malaysia pada Januari 1998 ( warna kuning menunjukkan satelit yang bisa
dipakai pada suatu jam tertentu )
Tabel 1. Jaringan Satelit GPS (Rizos, 1999.) SVN
(nomor satelit)
PRN Tanggal peluncuran
Blok II
Blok IIF Dijadwalkan
Gambar 8. Satelit GPS blok IIR dan Jaringan Orbit Satelit GPS
C.2. SISTEM KENDALI
Jalur orbit seluruh satelit GPS diamati oleh stasiun-stasiun pengamat milik
Angkatan Udara Amerika Serikat, antara lain berlokasi di Hawaii, Kwajalein,
Ascension Island, Diego Garcia dan Colorado Springs, Colorado. Selain itu juga
diamati oleh stasiun-stasiun pengamat milik National Geospatial-Intelligence
Agency (NGA). Data-data orbit satelit kemudian dikirimkan kepada pusat kendali
AU AS di Air Force Space Command yang terletak di pangkalan AU Schriever di
Colorado Springs yang dioperasikan oleh Skwadron Operasi Angkasa ke-2 (2
SOPS). Pusat kendali ini memberikan data navigasi terbaru kepada
masing-masing satelit secara teratur melalui antena daratnya yang terletak di Ascension
Island, Diego Garcia, Kwajalein dan Colorado Springs. Proses ini diperlukan
untuk mensinkronisasi jam atom pada satelit sampai kepada ketelitian satu
Gambar 9. Posisi Stasiun Kendali Jaringan GPS di seluruh dunia
Gambar 10. Stasiun Pelacak Satelit GPS yang terletak di Hawaii
C.3. PEMAKAI
Penerima GPS secara umum terdiri dari antena yang menerima sinyal dari
satelit, prosesor dan jam yang sangat akurat (biasanya jam dengan osilator kristal)
serta display data GPS (Brain, 2009). Kualitas sensor GPS bisa dilihat dari berapa
jalur sinyal yang dimilikinya yang menunjukkan berapa banyak satelit yang bisa
dipantau secara bersamaan. Dahulu jalur sinyal yang dimiliki sensor hanya empat
atau lima, namun sejak 2006 mulai muncul sensor dengan jalur sinyal sebanyak
12 atau 20 buah.
Gambar 12. Sensor GPS versi OEM berdasar chip SiRF Star III dan banyak digunakan dalam produk komersial, berukuran 12 x 15 mm
Gambar 13. Alat Penerima GPS
D. PROTOKOL GPS
Sensor GPS bisa berkomunikasi dengan komputer dan peralatan lain
dengan protokol standar NMEA 0183 (Hewerdine,2005) dan NMEA 2000 yang
dibuat oleh National Marine Electronics Association milik Amerika Serikat.
Untuk mempergunakannya diperlukan sejumlah biaya lisensi. Namun metode
memperbolehkan program-program komputer berlisensi bebas seperti gpsd serta
program lain berdasar referensi Glenn Baddeley maupun Dale DePriest untuk
memakai protokol NMEA tanpa melanggar hukum tentang hak cipta. Selain itu
terdapat juga protokol berlisensi lain seperti u-blox, SiRF dan MTK. Media
transfer data bisa mempergunakan metode serial, USB maupun bluetooth.
Protokol NMEA merupakan standar yang ditujukan untuk kepentingan
komunikasi antara peralatan elektronik kelautan seperti echo sounder, sonar, Anemometer, gyrocompass, autopilot, penerima GPS dan masih banyak lagi peralatan lain. Standar ini mempergunakan metode komunikasi serial dengan kode
karakter ASCII yang menentukan bagaimana data ditransfer dari satu pengirim kepada satu atau banyak penerima, selain itu juga menentukan apa isi dari pesan
yang ditransfer sehingga penerima bisa menerjemahkan isi pesan dengan benar. Metode komunikasi serial yang dipakai antara lain : kecepatan data 4800 bit/detik,
8 data bit, tanpa paritas dan satu atau lebih bit tanda berhenti. Sedangkan metode
pemakaian kode ASCII antara lain : setiap pesan dimulai dengan karakter dollar
($), lalu lima karakter seterusnya menunjukkan jenis pesan yang ditransfer, lalu isi data dengan pemisah tanda koma, setelah itu isi data diakhiri dengan tanda
bintang (*) yang diikuti dengan dua karakter hexadesimal yang berupa checksum data. Checksum data ditentukan dengan algoritma Eksklusif-OR semua karakter antara $ dan *. Kemudian pesan diakhiri dengan karakter <CR><LF>.
Terdapat 19 jenis kode pengenal menurut standar NMEA (Baddeley,
2001), dari ke-19 jenis kode ini yang paling penting adalah GGA yang
menyediakan data ralat GPS, RMC yang menyediakan data minimum GPS dan
GSA yang menyediakan data status satelit :
1. $GPBOD - Bearing, origin to destination
2. $GPBWC - Bearing and distance to waypoint, great circle
3. $GPGGA - Global Positioning System Fix Data
4. $GPGLL - Geographic position, latitude / longitude
5. $GPGSA - GPS DOP and active satellites
6. $GPGSV - GPS Satellites in view
8. $GPR00 - List of waypoints in currently active route
9. $GPRMA - Recommended minimum specific Loran-C data
10.$GPRMB - Recommended minimum navigation info
11.$GPRMC - Recommended minimum specific GPS/Transit data
12.$GPRTE – Routes
13.$GPTRF - Transit Fix Data
14.$GPSTN - Multiple Data ID
15.$GPVBW - Dual Ground / Water Speed
16.$GPVTG - Track made good and ground speed
17.$GPWPL - Waypoint location
18.$GPXTE - Cross-track error, Measured
19.$GPZDA - Date & Time
Penjelasan lebih jelas diberikan sebagai berikut:
1. $GPBOD - Bearing, origin to destination, menyatakan arah antara suatu
titik asal dan titik tujuan.
Contoh : BOD,045.,T,023.,M,DEST,START
045.,T menyatakan 045 derajat dari "START" ke "DEST"
023.,M menyatakan 023 derajat Magnetik from "START" ke "DEST"
DEST destination waypoint ID
START origin waypoint ID
2. $GPBWC - Bearing and distance to waypoint, great circle; menyatakan
arah dan jarak ke suatu titik acuan.
Contoh:
$GPBWC,081837,,,,,,T,,M,,N,*13
BWC,225444,4917.24,N,12309.57,W,051.9,T,031.6,M,001.3,N,004*29
225444 UTC (Universal Time Coordinated ) 22:54:44 4917.24,N garis lintang dari titik acuan
12309.57,W garis bujur dari titik acuan
051.9,T arah ke titik acuan, derajat yang sebenarnya
031.6,M arah ke titik acuan, derajat magnetik
004 kode ID titik acuan
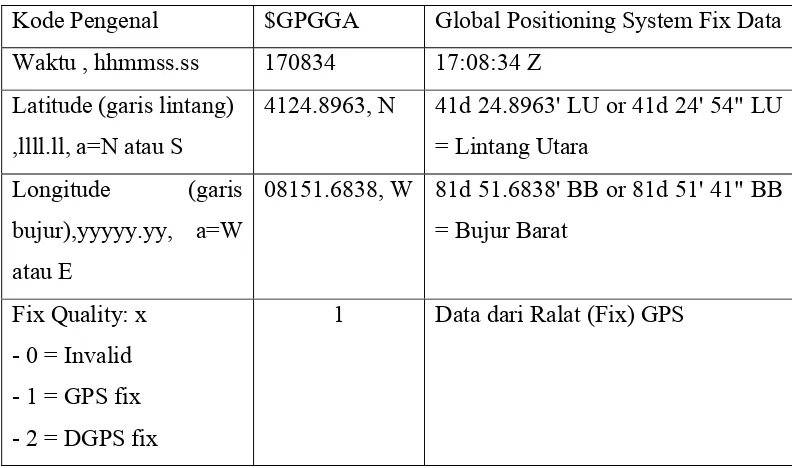
3. $GPGGA - Global Positioning System Fix Data
Tabel 2. Keterangan kode GGA (Baddeley, 2001.)
Kode Pengenal $GPGGA Global Positioning System Fix Data
Waktu , hhmmss.ss 170834 17:08:34 Z
08151.6838, W 81d 51.6838' BB or 81d 51' 41" BB
Jumlah satelit 05 Jumlah satelit yang terlacak
Horizontal Dilution of
Precision (HDOP)
1.5 Keakuratan relatif dari posisi
horisontal
Altitude (ketinggian) 280.2, M 280.2 meters di atas permukaan laut
Perbedaan Geoid -34.0, M -34 meter, Perbedaan ‘geoid’
WGS84 ellipsoid bumi terhadap
ketinggian diatas permukaan laut )
Waktu sejak
pemutakhiran DGPS
Kosong Tidak ada pemutakhiran
Kode id statiun
referensi DGPS
Kosong Tidak ada kode id stasiun
Checksum *75 Digunakan oleh program untuk mengetahui kerusakan data selama
transmisi
Global Positioning System Fix Data. Data posisi, waktu dan ralat untuk penerima GPS.
Contoh 1.
$--GGA,hhmmss.ss,llll.ll,a,yyyyy.yy,a,x,xx,x.x,x.x,M,x.x,M,x.x,xxxx
hhmmss.ss = UTC / waktu dari posisi yang ditunjukkan
llll.ll = garis lintang dari posisi yang ditunjukkan
a = N or S (utara/selatan)
yyyyy.yy = garis bujur dari posisi yang ditunjukkan
a = E or W (timur/barat)
x = indikator kualitas GPS (0=no fix, 1=GPS fix, 2=Dif. GPS fix)
xx = jumlah satelit yang dipakai
x.x = keakuratan pengukuran horisontal
x.x = ketinggian antena di atas permukaan laut
x.x = selisih Geoid
M = satuan dari selisih Geoid, meter
x.x = umur data Differential GPS / DGPS (second)
xxxx = kode ID stasiun referensi DGPS
Contoh 2.
$GPGGA,hhmmss.ss,llll.ll,a,yyyyy.yy,a,x,xx,x.x,x.x,M,x.x,M,x.x,xxxx*hh
1 = UTC / waktu dari posisi yang ditunjukkan
2 = garis lintang
3 = N or S / utara - selatan
4 = garis bujur
5 = E or W / timur atau barat
6 = indikator kualitas GPS (0=invalid; 1=GPS fix; 2=Diff. GPS fix)
7 = jumlah satelit yang dipakai
8 = keakuratan pengukuran horisontal
9 = ketinggian antena di atas permukaan laut (geoid)
10 = satuan dari ketinggian antenna, meter
11 = Perbedaan ‘geoid’ WGS84 ellipsoid bumi terhadap ketinggian
diatas permukaan laut
12 = satuan dari selisih Geoid, meter
13 = umur data Differential GPS / DGPS (second)
14 = kode ID stasiun referensi DGPS
15 = Checksum
4. $GPGLL - Geographic position, latitude / longitude; garis bujur-lintang
Contoh1. $GPGLL,3751.65,S,14507.36,E*77
Contoh2. $GPGLL,4916.45,N,12311.12,W,225444,A
4916.46,N garis lintang 49 deg. 16.45 min. LU
12311.12,W garis bujur 123 deg. 11.12 min. BB
225444 data diambil pada 22:54:44 UTC
A Data valid
Contoh3. $GPGLL,5133.81,N,00042.25,W*75
1 5133.81 garis lintang saat ini
2 N North/South = utara/selatan
3 00042.25 garis bujur saat ini
4 W East/West = timur/barat
5 *75 checksum
5. $GPGSA - GPS DOP and active satellites
Contoh 1. $GPGSA,A,3,,,,,,16,18,,22,24,,,3.6,2.1,2.2*3C
Contoh 2. $GPGSA,A,3,19,28,14,18,27,22,31,39,,,,,1.7,1.0,1.3*35
1 = Mode:
M=Manual, dipaksa untuk beroperasi pada mode 2D atau 3D
A=Automatic, 3D/2D 2 = Mode:
1=ralat tidak tersedia
2=2D
3=3D
3-14 = kode ID dari satelit/SV yang digunakan untuk ralat posisi(kosong
kalau tidak ada)
15 = PDOP
16 = HDOP
17 = VDOP
6. $GPGSV - GPS Satellites in view; satelit yang terlacak
Contoh.
$GPGSV,3,1,11,03,03,111,00,04,15,270,00,06,01,010,00,13,06,292,00*74
$GPGSV,3,2,11,14,25,170,00,16,57,208,39,18,67,296,40,19,40,246,00*74
$GPGSV,3,3,11,22,42,067,42,24,14,311,43,27,05,244,00,,,,*4D
$GPGSV,1,1,13,02,02,213,,03,-3,000,,11,00,121,,14,13,172,05*67
Keterangan:
1 = jumlah total pesan/kode berjenis ini pada periode ini
2 = nomor pesan/kode
3 = jumlah satelit yang terlacak
5 = ketinggian dalam derajat, 90 maksimum
6 = sudut Azimuth(000 sampai 359 derajat dari utara ke selatan) 7 = SNR, 00-99 dB (kosong jika tidak ada pelacakan)
8-11 = informasi tentang satelit kedua, seperti bagian 4-7
12-15= informasi tentang satelit ketiga, seperti bagian 4-7
16-19= informasi tentang satelit keempat, seperti bagian 4-7
7. $GPHDT - Heading, True; arah
Arah kendaraan/ kapal dalam derajat
$--HDT,x.x,T
x.x = Heading, degrees True
8. $GPR00 - List of waypoints in currently active route
Contoh 1.
$GPR00,EGLL,EGLM,EGTB,EGUB,EGTK,MBOT,EGTB,,,,,,,*58
Contoh 2.
$GPR00,MINST,CHATN,CHAT1,CHATW,CHATM,CHATE,003,004,00
5,006,007,,,*05
9. $GPRMA - Recommended Minimum specific Loran-C data
Contoh. $GPRMA,A,llll.ll,N,lllll.ll,W,,,ss.s,ccc,vv.v,W*hh
1 = status Data
2 = Latitude/ garis lintang
3 = N/S = utara/selatan
4 = longitude/garis bujur
5 = W/E = barat/timur
6 = tidak dipakai
7 = tidak dipakai
8 = kecepatan dalam knot
9 = Course over ground 10 = Variation
11 = arah dari variasi E/W
12 = Checksum
informasi navigasi minimum yang disarankan (dikirimkan oleh penerima
saat titik tujuan sudah aktif)
Contoh 1.
$GPRMB,A,0.66,L,003,004,4917.24,N,12309.57,W,001.3,052.5,000.5,V*0B
A status Data , A = OK, V = peringatan
0.66,L kesalahan antar-jalur (maksimal 9,9 mil laut),
kemudi ke ralat (L = kiri, R = kanan)
003 kode ID titik acuan asal
004 kode ID titik tujuan
4917.24,N titik tujuan, garis lintang 49 derajat. 17.24 min. North
12309.57,W titik tujuan, garis bujur 123 deg. 09.57 min. West
001.3 jarak ke tujuan, mil laut
052.5 arah ke tujuan
000.5 kecepatan kea rah titik tujuan, knot
V peringatan kedatangan,A = arrived/datang, V = not arrived/tidak datang
*0B checksum
Contoh 2.
$GPRMB,A,4.08,L,EGLL,EGLM,5130.02,N,00046.34,W,004.6,213.9,122.9,A*3D
1 2 3 4 5 6 7 8 9 10 11 12 13 14
1 A keabsahan
2 4.08 di luar jalur
3 L kemudi ke L=kiri (L/R)
4 EGLL titik acuan terakhir
5 EGLM titik acuan berikutnya
6 5130.02 garis lintang dari titik acuan selanjutnya
7 N North/South = utara/selatan
8 00046.34 garis bujur dari titik acuan selanjutnya
9 W East/West=barat/timur
11 213.9 arah ke titik acuan.
12 122.9 kecepatan saat mendekat
13 A keabsahan
14 *3D checksum
Contoh 3. $GPRMB,A,x.x,a,c--c,d--d,llll.ll,e,yyyyy.yy,f,g.g,h.h,i.i,j*kk
1 = status data (V=peringatan)
2 = kesalahan jalur dalam mil laut
3 = arah kemudi untuk memperbaiki kesalahan jalur (L or R)
4 = kode ID titik acuan asal
5 = kode ID titik acuan tujuan
6 = garis lintang titik tujuan
7 = N or S = U atau S
8 = garis bujur titik tujuan
9 = E or W = barat atau timur
10 = jarak ke titk tujuan dalam mil laut
11 = arah ke titik tujaun, dalam derajat
12 = kecepatan saat mendekati titik tujuan dalam knot
13 = status kedatangan;
14 = Checksum
11. $GPRMC - Recommended minimum specific GPS/Transit data
Contoh1.
$GPRMC,081836,A,3751.65,S,14507.36,E,000.0,360.0,130998,011.3,E*62
Contoh2.
$GPRMC,225446,A,4916.45,N,12311.12,W,000.5,054.7,191194,020.3,E*68
225446 waktu UTC 22:54:46
A peringatan penerima navigasi;A = OK, V =
peringatan
4916.45,N garis lintang 49 deg. 16.45 min LU
12311.12,W garis bujur 123 deg. 11.12 min BB
000.5 kecepatan , Knots
191194 tanggal 19 November 1994
020.3,E variasi magnetis 20.3 deg timur
*68 checksum Contoh3.
$GPRMC,220516,A,5133.82,N,00042.24,W,173.8,231.8,130694,004.2,W*70
1 2 3 4 5 6 7 8 9 10 11 12
1 220516 kode waktu
2 A keabsahab – A=ok, V=invalid
3 5133.82 garis lintang saat ini
4 N North/South = utara/selatan
5 00042.24 garis bujur saat ini
6 W East/West= timur/barat
7 173.8 kecepatan dalam knotSpeed in knots
8 231.8 True course 9 130694 kode tanggal
10 004.2 Variation
11 W East/West= timur/barat
12 *70 checksum Contoh4.
$GPRMC,hhmmss.ss,A,llll.ll,a,yyyyy.yy,a,x.x,x.x,ddmmyy,x.x,a*hh
1 = waktu UTC
2 = status data (V=peringatan penerima navigasi)
3 = garis lintang
4 = N or S=utara/selatan
5 = garis bujur
6 = E or W=timur/barat
7 = kecepatan, knot
8 = Track made good dalam derajat True 9 = tanggal UT
10 = derajat variasi magnetis(dari true course dikurangkan ke arah
11 = E or W=timur/barat
12 = Checksum 12. $GPRTE – Routes
contoh.
$GPRTE,2,1,c,0,PBRCPK,PBRTO,PTELGR,PPLAND,PYAMBU,PPFAIR,
PWARRN,PMORTL,PLISMR*73
$GPRTE,2,2,c,0,PCRESY,GRYRIE,GCORIO,GWERR,GWESTG,7FED*34
1.nomor kode dalam urutan
2.nomor kode
3.'c' = jalur yang sedang aktif, 'w' =daftar titik acuan dimulai dengan titik
tujuan
4.nama atau nomor dari jalur yang aktif 5.onwards, nama dari titik acuan pada jalur 13. $GPTRF - Transit Fix Data
Waktu, tanggal, posisi dan informasi yang berhubungan dengan ralat transit
$--TRF,hhmmss.ss,xxxxxx,llll.ll,a,yyyyy.yy,a,x.x,x.x,x.x,x.x,xxx
hhmmss.ss = waktu UTC
xxxxxx = tanggal: dd/mm/yy
llll.ll,a = Latitude , N/S
yyyyy.yy,a = Longitude, E/W
x.x = sudut ketinggian
x.x = jumlah iterasi
x.x = jumlah interval doppler
x.x = pemutakhiran jarak, mil laut
x.x = kode ID satelit
14. $GPSTN - Multiple Data ID
kode ID data jamak
kode ini dipancarkan sebelum tiap kode individual dimana penerima
perlu untuk menentukan sumber data yang tepat dalam system.
pemindaian atau peralatan yang menggabungkan data dari berbagai
sumber dan menghasilkan satu jenis keluaran.
$--STN,xx
xx = kode ID pengirim, 00 to 99
15. $GPVBW - Dual Ground / Water Speed
data referensi perairan dan daratan
$--VBW,x.x,x.x,A,x.x,x.x,A
x.x =kecepatan air arah membujur, knot
x.x = kecepatan air melintang, knot
A = Status: kecepatan air, A = Data sah
x.x = Longitudinal ground speed, knots
x.x = Transverse ground speed, knots
A = Status: Ground speed, A = Data valid
16. $GPVTG - Track made good and ground speed
Contoh 1. $GPVTG,360.0,T,348.7,M,000.0,N,000.0,K*43
Contoh 2. $GPVTG,054.7,T,034.4,M,005.5,N,010.2,K
054.7,T True track made good 034.4,M Magnetic track made good 005.5,N kecepatan darat, knot
010.2,K kecepatan darat, Kilometer per jam
Contoh 3. $GPVTG,t,T,,,s.ss,N,s.ss,K*hh
1 = Track made good
2 = huruf 'T' menyatakan bahwa track made good relative terhadap atah utara
3 = tidak dipakai
4 = tidak dipakai
5 = kecepatan di darat dalam knot
6 = huruf 'N' menyatakan bahwa kecepatan di darat dalam knot
7 = kecepatan di darat dalam kilometer/jam
8 = huruf 'K' menyatakan bahwa kecepatan di darat dalam
9 = Checksum
Track made good dan kecepatan relative terhadap daratan $--VTG,x.x,T,x.x,M,x.x,N,x.x,K
x.x,T = Track/jalur, derajat True
x.x,M = Track, derajat Magnetik
x.x,N = kecepatan, knots
x.x,K = kecepatan, Km/hr
17. $GPWPL - Waypoint location
Contoh 1. $GPWPL,4917.16,N,12310.64,W,003*65
4917.16,N Latitude dari titik acuan
12310.64,W Longitude dari titik acuan
003 kode ID titik acuan
saat sebuah jalur sedang aktif kode ini dikirimkan kepada setiap titik
acuan pada jalur tersebut secara berurutan. Saat semua titik acuan telah
dilaporkan GPR00 dikirimkan pada urutan data selanjutnya. Pada setiap
kelompok kode hanya ada satu kode WPL atau kode R00 akan dikirim.
Contoh 2. $GPWPL,5128.62,N,00027.58,W,EGLL*59
1 2 3 4 5 6
1 5128.62 Latitude of nth waypoint on list
2 N North/South
3 00027.58 Longitude of nth waypoint
4 W East/West
5 EGLL Ident of nth waypoint
6 *59 checksum
18. $GPXTE - Cross-track error, Measured
Contoh 1. $GPXTE,A,A,0.67,L,N
A kode peringatan, V = peringatan
(peringatan Loran-C Blink atau SNR )
L kemudi ke kiri untuk memperbaiki jalur ( L=kiri,R=kanan)
N satuan jarak, mil laut
Contoh 2. $GPXTE,A,A,4.07,L,N*6D
1 2 3 4 5 6
1 A keabsahan
2 A pengunci periode
3 4.07 jarak dari jalur
4 L kemudi ke kiri (L/R)
5 N satuan jarak
6 *6D checksum
19. $GPZDA - Date & Time
UTC,hari, bulan, tahun dan zona waktu local
$--ZDA,hhmmss.ss,xx,xx,xxxx,xx,xx
hhmmss.ss = UTC
xx = hari, 01 to 31
xx = bulan, 01 to 12
xxxx = Tahun
xx = keterangan zona waktu, 00 to +/- 13 hours
xx = keterangan zona waktu (menit) (tanda sama dengan jam)
Program-program yang diakui resmi sesuai protokol NMEA antara lain :
NetStumbler
Rand McNally StreetFinder
Magic e-Map,
Microsoft: Streets and Trips, MapPoint, Autoroute
PocketMap Navigator
OnCourse Navigator
Delorme: Street Atlas, Topo USA, XMAP,
Fugawi: Marine ENC, Map of America
iGuidance
TomTom Navigator
Via Michelin
Destinator
Route 66
Rand McNally Street Finder
TravRoute Door-to-Door 2000
Mappopolis
National Geographic TOPO!
CoPilot Live dan lain-lain.
E. SINYAL DAN FREKUENSI GPS
Setiap satelit GPS terus-menerus memancarkan sinyal-sinyal kepada
peralatan penerima GPS untuk kepentingan penentuan lokasi dan sinkronisasi
waktu. Secara umum sinyal-sinyal tersebut terbagi ke dalam dua kategori yaitu
sinyal jarak dan sinyal navigasi. Sinyal jarak dipergunakan untuk menentukan
jarak penerima dan satelit. Sinyal navigasi memberikan informasi orbit satelit
sehingga penerima dapat menghitung posisi satelit (ephemerisnya). Sinyal
navigasi juga berisi informasi tentang jaringan GPS secara keseluruhan maupun
tentang waktu.
E.1. SINYAL JARAK
Sinyal jarak diperlukan untuk menghitung signal transmit time, waktu yang diperlukan sinyal dari satelit mencapai penerima, sering juga disebut Time of Arrival (TOA), yang apabila dikalikan dengan kecepatan cahaya dalam vakum (299792458m/s) akan memberikan informasi jarak dari satelit kepada penerima.
Setiap satelit memancarkan sinyal-sinyal GPS dalam dua jenis kode
spektrum yaitu kode Coarse / Acquisition (C/A) yang tersedia secara gratis untuk
umum dan kode Precise (P) yang terenkripsi dan dipergunakan oleh militer. Kode
C/A dan kode P didesain berbeda fase 90° (Quadra-Phase).
Tabel 3. Pita Frekuensi GPS
Pita
Frekuensi Fase Penggunaan
Awal
1.In-Phase (I)-sefase
dengan gelombang
pembawa
2. Quadra-Phase (Q) -berbeda fase 90° dengan
2. Quadra-Phase - Sinyal Data Safety of Life (SoL)
Gambar 15. Pembuatan PRN
Kode C/A adalah kode PRN (Pseudo Random Number) sepanjang 1.023 bit yang dipancarkan 1,023 Megabit /second (1,023 Mb/s) yang diulang terus
setiap satu milidetik. Keunggulan dari kode random dengan ribuan bit ini adalah
kerumitannya sehingga hanya dapat diterjemahkan jika benar-benar sama dan
setiap satelit masing-masing mempunyai kode C/A PRN yang berbeda. Metode
ini juga digunakan dalam teknologi CDMA (Code Division Multiple Access) di mana penerima dapat menerima sinyal dari berbagai satelit pada frekuensi yang
sama.
Tapped Feedback Shift Registers dipergunakan untuk menghasilkan kode biner 0 dan 1 secara urut dengan frekuensi 1,023 MHz. Pada setiap pulsa, bit pada
register digeser ke kanan di mana isi dari register paling kanan di baca sebagai
keluaran. Data baru pada register paling kiri dibuat dengan penjumlahan modulo-2
(binary sum) dari sekelompok register tertentu. Pada kode C/A, mempergunakan dua buah TFSR 10 bit yang menghasilkan dua buah kode Gold (G) yaitu G1
dengan menghitung polynomial 1 + X3 + X10 dan G2 dengan menghitung
polynomial 1 + X2 + X3 + X6 + X8 + X9 + X10. Keluaran dari register paling kanan
Kombinasi keluaran yang berbeda dari register G2 menghasilkan kode PRN yang
berbeda. Ada 36 jenis kode yang berbeda yang bisa dihasilkan dalam satu kali
proses.
Gambar 16. Modulasi kode C/A
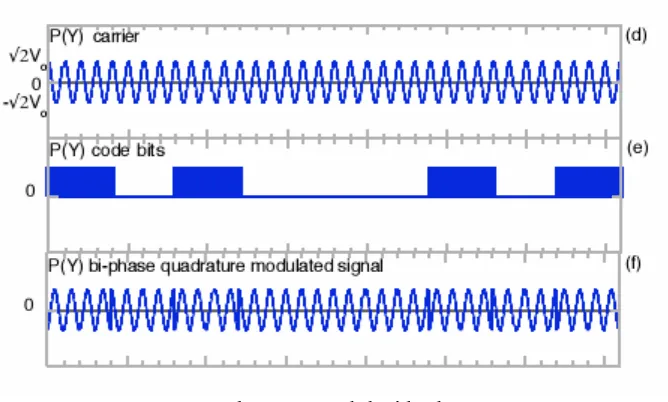
Kode Precision juga merupakan kode PRN (kode acak) namun setiap
satelit mempergunakan sebanyak 6.1871 × 1012 bit kode dan hanya diulang satu
minggu sekali (dipancarkan dengan kecepatan 10,23 Mbit/detik). Kode P
sepanjang ini cukup aman terhadap interferensi yang timbul dari obyek-obyek tata
surya. Untuk mencegah penggunaannya oleh pihak-pihak yang tidak
berkepentingan maka kode P dienkripsi, dengan suatu algoritma enkripsi, kode
W, untuk menghasilkan suatu kode akhir, kode Y. Kode yang terenkripsi inilah
yang ditransmisikan ke penerima (kode P(Y)). Kode enkripsi W tetap
dirahasiakan terhadap masyarakat namun diperkirakan berada di sekitar 20 kHz
yang lebih rendah frekuensinya dari kode P. Hal ini memperbolehkan
penerjemahan kode Y tanpa mengetahui detail dari kode W (Nerem, 2004).
Kode PRN GPS dibuat dari angka 1 sampai 37 (hanya angka 1-31 yang
Gambar 17. Modulasi kode P
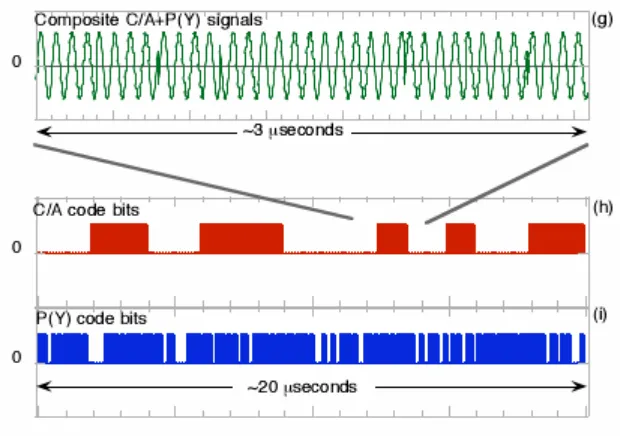
Kode C/A dibuat unik untuk masing-masing satelit sedangkan kode P pada
masing-masing satelit sebenarnya merupakan potongan dari kode P utama dengan
panjang kira-kira 2.35 × 1014 bit (235,000,000,000,000 bit), masing-masing satelit
memancarkan kode bagiannya yang berbeda-beda.
E.2. SINYAL NAVIGASI
Sinyal navigasi berisi tiga bagian pesan yaitu : informasi waktu dan
tanggal, data ephemeris dan almanak. Informasi waktu juga berisi tentang status satelit dan kesehatannya. Data ephemeris memberikan informasi orbit satelit secara akurat. Almanak berisi data orbit / lokasi dan informasi masing-masing
satelit yang berada pada seluruh jaringan GPS dan nomor PRNnya
masing-masing.
Data ephemeris berisi jalur-jalur orbit sesuai dengan hukum Keppler yang
dikoreksi dengan memperhitungkan gangguan radiasi matahari dan medan-medan
dapat berlaku selama beberapa minggu. Almanak dipergunakan untuk membantu
penerima GPS untuk menentukan satelit mana yang harus dicari, setelah
menemukan sinyal satelit yang dimaksud, penerima mengambil data ephemeris dari satelit yang bersangkutan. Penentuan posisi satelit tidak dapat ditentukan
sampai penerima GPS menerima keseluruhan data ephemeris secara lengkap dan akurat dari satelit tersebut.
Sinyal navigasi tersusun dalam bentuk 1.500 bit data, yang terbagi lagi
atas lima bagian (frame) masing-masing sebesar 300 bit dan dipancarkan dengan kecepatan 50 bps. Sehingga setiap bagian memerlukan 6 detik untuk
menyelesaikan pemancaran datanya.
Bagian 1 berisi data jam dan tanggal, status satelit dan kondisinya
Bagian 2 dan 3 , berisi data ephemeris satelit
Bagian 4 dan 5, berisi 1/25 bagian dari almanak, sehingga untuk
memperoleh isi almanak secara keseluruhan (15.000 bit) diperlukan waktu 12,5
menit.
Transfer data almanak akan memakan waktu 12,5 menit, hal inilah yang menyebabkan waktu jeda yang lama bagi peralatan pemakai GPS saat pertama
kali dinyalakan supaya berada pada status siap pakai. Informasi almanak
dipergunakan untuk memantau satelit-satelit GPS yang lain, sedangkan data
ephemeris dari masing-masing satelit digunakan untuk menentukan posisi satelit-satelit yang aktif dipakai. Waktu yang diperlukan untuk memperoleh informasi ini
menyebabkan waktu jeda yang cukup lama pada saat penentuan posisi pertama
kali setelah peralatan penerima GPS dimatikan selama beberapa jam.
.
E.3. GELOMBANG PEMBAWA
Kode C/A dan kode P adalah data, sedangkan untuk mentransmisikannya
diperlukan gelombang pembawa. Gelombang pembawa dihasilkan dengan jam
kristal cesium atau rubidium dengan frekuensi 10,23 MHz. Setiap satelit
diperlengkapi dengan dua buah jam atom cesium dan dua buah jam atom
rubidium, sehingga diperoleh ketepatan waktu 10-13 detik dalam satu hari atau satu
IIR dan IIR-M. Satelit-satelit yang termasuk golongan blok IIF bahkan
mempergunakan maser hidrogen yang mempunyai ketepatan waktu lebih baik.
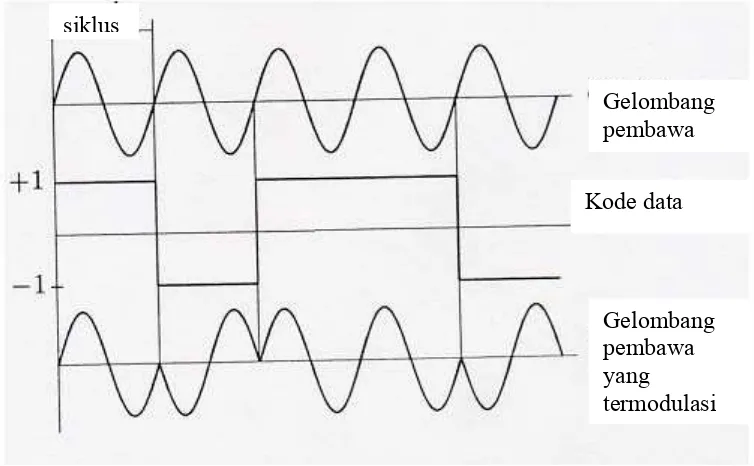
Proses modulasi data ke dalam gelombang pembawa diperlihatkan pada gambar
12, dimana gelombang pembawa sinusoidal disuperposisikan dengan gelombang
data yang bersifat kotak (square wave).
Gambar 18. Gelombang pembawa, sinyal jarak dan sinyal navigasi
siklus
Gelombang pembawa
Kode data
Gelombang pembawa yang termodulasi
Gambar 20. Modulasi kode C/A dan P
Gelombang pembawa yang dipakai adalah pada pita L, yaitu dua frekuensi pita L,
L1 dan L2 (Reinard, 2000) . L1 dimodulasikan dengan kode C/A (kode publik)
maupun kode P (kode militer), sedangkan L2 dimodulasikan dengan kode P saja.
Pemakaian dua jenis frekuensi ini berguna untuk mengukur adanya gangguan
ionosfer sehingga dapat menghilangkan pengaruh derau yang timbul. Selain itu
berguna juga untuk data cadangan dimana data GPS diperoleh dari dua sumber
yang berguna apabila mengalami kesulitan pengolahan data jika dari satu sumber
saja. Dan juga berguna saat terjadinya gangguan disengaja pada sistem GPS
melalui jamming dari orang-orang yang tidak bertanggung jawab.
Frekuensi L1 diperoleh dengan mengalikan frekuensi dasar 10,23 MHz
dengan 154 sehingga diperoleh 1575.42MHz ( =19 cm) sedangkan frekuensi L2
diperoleh dengan mengalikan frekuensi dasar dengan 120 sehingga diperoleh
E.4. PENSINYALAN TAMBAHAN
Sistem GPS telah beroperasi dengan penuh sejak 17 Juli 1995
mempergunakan ketiga jenis sinyal di atas. Namun karena perkembangan
teknologi dan juga bertambahnya kebutuhan akan pemakaian GPS dalam bidang
sipil menuntut adanya pensinyalan tambahan. Pertama kali diumumkan oleh wakil
presiden AS pada tahun 1998 dan dikuatkan oleh keputusan konggres AS pada
tahun 2000 yang menyebut proyek tersebut sebagai GPS III.
Sistem GPS III membutuhkan stasiun darat dan satelit yang baru, dengan
tambahan sinyal navigasi untuk keperluan militer maupun sipil. Selain itu juga
dirancang agar sistem ini mempunyai keakuratan dan ketersediaan yang lebih baik
bagi semua pemakai sistem GPS. Sistem GPS III direncanakan akan selesai
kira-kira tahun 2013.
E.4.1. SINYAL L2C
Tambahan sinyal yang pertama kali diumumkan adalah sinyal L2C yang
digunakan untuk keperluan sipil. Kode sipil ini dipancarkan pada frekuensi yang
berbeda daripada L1 untuk kode C/A, yaitu frekuensi L2 sehingga disebut sinyal
L2C (kode Civil (sipil) pada L2). Oleh karena perbedaan ini, maka pensinyalan L2C memerlukan perangkat keras baru pada satelit GPS sehingga hanya akan
dapat dipergunakan pada satelit GPS dengan desain baru yaitu satelit Block IIR-M
dan yang akan datang.
Tidak seperti kode C/A, sinyal L2C mempergunakan dua buah kode PRN
sebagai sinyal jarak, yaitu kode Civilian Moderate (CM) dan kode Civilian Long (CL). Kode CM terdiri dari 10.230 bit kode yang diulang setiap 20 ms. Kode CL
terdiri dari 767.250 bit kode yang diulang setiap 1.500 ms. Masing-masing sinyal
dipancarkan dengan kecepatan 511.500 bps, namun keduanya dimultipleksikan
sehingga kecepatannya bersamanya menjadi 1.023.000 bps. Kode CM
dimodulasikan dengan metode sinyal navigasi CNAV sedangkan kode CL tidak
dimodulasikan dengan data apapun sehingga disebut sinyal tanpa data . Jika
pengembalian data 2,7 dB lebih baik dan pelacakan 0,7 dB lebih baik sekalipun
sinyal L2C dipancarkan dengan daya 2,3 dB lebih lemah.
E.4.2. PESAN NAVIGASI CNAV
Metode navigasi CNAV merupakan perbaikan dari pesan navigasi
sebelumnya (NAV) karena didesain lebih akurat. Dalam format pesan CNAV,
pesan navigasi seperti waktu, status, Ephemeris dan almanak tidak lagi mempergunakan frame melainkan menggunakan metode paket data seperti protokol TCP/IP pada internet. Metode paket data mempergunakan dua bagian
pesan, yang pertama paket kendali (PCI : Protocol Control Information) dan yang kedua data yang ingin ditransmisikan. PCI terletak di depan dan di belakang pesan
sedang data yang diinginkan berada di antaranya.
Dengan pesan navigasi CNAV dua dari empat pesan yang dikirimkan
berisi data ephemeris dan minimal satu dari empat paket data berisi data waktu, namun sebenarnya desain dari CNAV memperbolehkan beragam paket data untuk
ditransmisikan. Dengan 32 satelit GPS yang beroperasi saat ini sedangkan
kebutuhan data yang perlu dipancarkan oleh satelit masih kecil maka sebenarnya
pemakaian kapasitas transmisi data satelit GPS belum mencapai 75%,
F. SENSOR GPS
Elink Tecnologies, Inc™ merupakan salah satu pembuat sensor GPS yang
banyak dipakai oleh produsen peralatan penerima GPS / OEM (Original Equipment Manufacturer). Salah satu sensor versi OEMnya adalah ELINK EG-T10. Dibuat berdasarkan arsitektur chipset SiRFstarII yang telah banyak
digunakan dalam aplikasi GPS. Waktu yang dibutuhkannya untuk aktif dari
kondisi mati adalah 45 detik, dari kondisi menyala adalah 8 detik. Sensor ini
memiliki 12 jalur sinyal sehingga dapat memantau 12 satelit GPS sekaligus untuk
menjalankan fungsinya, dengan waktu pantau ulang selama 0,1 detik. Mempunyai
fitur hemat daya. Mempergunakan mikroprosesor ARM7TDMI yang dapat
diprogram oleh pemakai. Diperlengkapi dengan memori berjenis Static RAM
dengan kapasitas 1Mb dan dapat ditambah sampai kapasitas 8Mb. Diperlengkapi
juga dengan memori non-volatile (ROM) berjenis memori flash dengan kapasitas 4Mb yang dapat ditambah sampai 16Mb. Dua buah bandar serial berjenis
tegangan TTL, satu dipergunakan untuk menerima sinyal perintah GPS dan satu
sebagai masukan RTCM-104 DGPS. Sensor ini mempunyai ukuran fisik
71,12x40,64x14,4 mm. Mendukung standar protocol NMEA-0183 dan SiRF.
Mempunyai demodulator RTCM-104 DGPS dan WAAS (Elink, 2006).
Sensor ini mendukung protocol NMEA GPGGA (Global Positioning System Fix Data )(Baddeley ,2001) :
G. MIKROKONTROLER MCS-51
Mikrokontroler merupakan suatu sistem komputasi yang terintegrasi yang
mencakup prosesor, memori (RAM dan ROM) , serta pena masukan keluaran
(I/O). MCS 51 merupakan keluarga mikrokontroler yang didesain oleh Intel
Corporation™ yang telah berkembang menjadi berbagai turunan yang
dikembangkan oleh perusahaan lain. Atmel Corporation ™ merupakan salah satu
pengembangnya yang memproduksi mikrokontroler seri 89x51. Beberapa
karakteristik teknis dari mikrokontroler (Atmel, 2005) ini antara lain:
1. Memori berjenis flash berbasis semikonduktor berkapasitas 4KByte
dengan ketahanan tulis ulang sebanyak 1000 kali.
3. Frekuensi kerja dari 0-33 MHz.
4. Penguncian memori terprogram dalam tiga tahap.
5. Memori RAM internal sebesar 128x8 bit.
6. Jalur I/O sebesar 32 pena.
7. Timer / Counter 16 bit berjumlah dua.
8. Enam sumber interupsi (serial, timer dan saklar eksternal).
9. Jalur komunikasi serial UART (Universal asynchronous receiver/transmitter ).
10. Tersedia mode hemat daya : low power (6,5 mA) dan power down (50 A)(Atmel, 2008)
11. Bendera power off.
12. Metode pemrograman ISP (mode byte dan mode page).
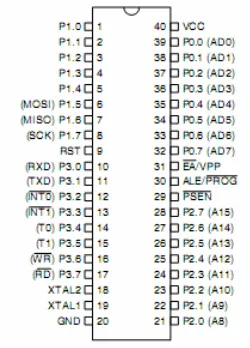
Gambar 23. Diagram blok dari arsitektur internal AT89S51.
H. DT-51™ MINIMUM SYSTEM (MINSYS)
Innovative Electronic™ merupakan salah satu perusahaan pembuat sistem
mikrokontroler berbasis AT89S51. Produknya yang digunakan dalam penelitian
ini adalah DT-51 MinSys versi 3.3. Di dalam DT-51™ MinSys terdapat kernel yang didesain untuk mempermudah penggunaan mcs-51 terutama untuk periferal
tambahan seperti LCD ataupun periferal lain yang menggunakan sistem bus
mcs-51 yang dibuat oleh Innovative Electronics™. Terdapat juga tambahan memori
Spesifikasi khusus dari DT-51™ MinSys antara lain :
1. Mempergunakan AT89S51 dengan memori flash 4 KB dan
mendukung varian MCS-51 dengan 40 pena lainnya seperti
AT89S52, AT89S53, AT89S8252, AT89LS53 dan AT89LS8252.
2. Komunikasi serial dengan komputer dengan standar RS-232.
3. Memori EEPROM sebesar 8kB untuk menyimpan data dan
program.
4. 4 bandar masukan keluaran dengan kapasitas 8 bit.
5. Bandar keluaran untuk LCD (Liquid Crystal Display). (Innovative Electronics, 2009)
Gambar 24. DT-51 Minimum System versi 3.3 buatan Innovative ElectronicsTM
I. KOMUNIKASI SERIAL
Komunikasi serial merupakan salah satu jenis komunikasi yang populer
selain komunikasi paralel, standar yang digunakan disebut sebagai RS-232.
Komunikasi serial berlangsung secara dua arah (full duplex). Data dikirim secara berurutan satu per satu. Sedangkan data baru bisa dipahami apabila merupakan
kumpulan 8 bit yang disebut byte. Sehingga memerlukan pengolahan sebelum pengiriman maupun sesudah penerimaan data supaya data dapat diterjemahkan.
Perangkat keras yang melakukan proses ini disebut UART (Universal Asynchronus Receiver Transmiter (Peacock, 1998).
Beberapa ciri khas komunikasi serial antara lain:
1. Kabel serial bisa berukuran cukup panjang. Hal ini karena bandar serial
mengirimkan logika ‘1’ sebagai -3 volt hingga -25 volt dan logika ‘0’
sebagai +3 volt sampai +25 volt. Rentang tegangan sebesar 50 volt ini
menangkal adanya pengaruh perubahan sinyal karena kehilangan daya
sehingga memungkinkan kabel serial sepanjang kira-kira 15 meter. Makin
tinggi kecepatan pengiriman datanya makin pendek kabel yang mungkin
dipakai supaya kehandalan data tetap terjamin.
Tabel 4. Tingkat Tegangan RS-232 (Bies, 2009)
Tingkat Logika Transmitter Capable (V) Receiver Capable (V)
Space State (0) +5...+15 +3...+25
Mark State (1) -5...-15 -3...-25
Undefined - -3...+3
Tabel 5. Panjang Kabel dari Standar RS232 menurut Texas Instrument (Bies, 2009)
Baudrate Panjang Kabel Maksimal (feet)
19200 50
9600 500
4800 1000