LAMPIRAN 1 Program pada Muatan
#include <TinyGPS++.h> #include <SoftwareSerial.h>
static const int RXPin = 4, TXPin = 3; static const uint32_t GPSBaud = 4800; TinyGPSPlus gps;
if (millis() > 10000 && gps.charsProcessed() < 100) {
Serial.print(gps.time.minute()); Serial.print(F(":"));
if (gps.time.second() < 10) Serial.print(F("0")); Serial.print(gps.time.second());
Int az=gps.courseTo(nilai_latitude_pengamat,nilai_longitude_pengamat, float_ latitude float_longitude);
azimuth = (90-(az)); }
else {
azimuth = 270+(180-(az)); }
Serial.println(azimuth); Serial.print("Bearing AZ : "); Serial.println(az);
Serial.println(); delay(1000);
myservo.write(azimuth); delay(1000);
DAFTAR PUSTAKA
[1] Butler, Jane, et al. 2013. Wireless Networking In The Development World. 3rd Edition
[2] Sidharta, Himawan. 2009. “Rancang Bangun Perangkat Lunak Sistem Autotracking Satellite Antenna Mobile”. Universitas Indonesia. Depok.
[3] Program Teknisi Jardiknas, 25 Februari 2011, Antena Dan Propagasi Gelombang Radio. http://oc.its.ac.id/ambilfile.php?idp=158.
[4] Balanis, Constantine A. 2005. Antenna Theory : Analysis and Design. 3rd Edition. US: John Wiley & Sons.
[5] Alaydrus, Mudrik. 2011. Antena Prinsip dan Aplikasi. Yogyakarta: Graha Ilmu.
[6] Siregar, Mutiara Sofia. 2009. “Rancang Bangun Antena Wajanbolik 2,4 Ghz Untuk Jaringan Wireless LAN”. Laporan Tugas Akhir. Universitas Sumatera Utara.
[7] Wowok.2008. Antena Wireless Untuk Rakyat.Yogyakarta: Andi.
[8] Rahmat, Edy. 2015. “Implementasi Dan Analisis Kinerja Sistem Automatic Tracking Control Polarisasi Antena Penerima Frekuensi 433 Mhz Berbasis GPS”. Laporan Tugas Akhir. Universitas Telkom.
[9] http://www.elecfreaks.com/store/arduino-nano-dep03-p-14.html. diakses pada tanggal 13 november 2015.
[11] Rochmah. 2006. “Sistem Navigasi GPS untuk penerbangan masa depan”. Laporan Tugas Akhir. Universitas Indonesia
[12] www.u-blox.com. diakses pada tanggal 13 November 2015
[13] Jaelani, Muhammad, S.T. 2004. “Sudut, Arah dan Azimuth”. Diklat Teknis Pelatihan Tata Kota. Surabaya
BAB III
PERANCANGAN SISTEM
AUTOTRACKING
ANTENA YAGI
FREKUENSI 433 MHz MENGGUNAKAN DATA GPS
3.1 Umum
Sistem tracking adalah suatu sistem yang memungkinkan antena untuk mendeteksi dan bergerak ke arah sinyal terkuat secara otomatis. Sistem tracking biasanya digunakan pada komunikasi satelit, dimana satelit bergerak sepanjang waktu dan kesalahan pengarahan haruslah minimal. Sistem ini menggunakan mikrokontroler dan motor untuk menggerakkan antena. Dengan menggunakan sistem tracking maka kuat sinyal yang diterima dapat dipertahankan sehingga tercipta komunikasi yang baik.
3.2 Spesifikasi Perangkat
Ada beberapa spesifikasi yang menjadi pendukung dalam penyusunan tugas akhir ini, adapun spesifikasi perangkat yang mendukung meliputi spesifikasi perangkat lunak dan perangkat keras.
3.2.1 Spesifikasi Perangkat Lunak (Software)
Perangkat lunak yang digunakan dalam penyusunan tugas akhir adalah sebagai berikut:
- Sistem Operasi : Windows 10
- Aplikasi Program : Arduino 1.6.0, 3DRRadio Config 1.3.1, dan Tera Term
3.2.2 Spesifikasi Perangkat Keras (Hadware)
Ada beberapa perangkat keras yang digunakan dalam penyusunan tugas akhir ini, diantaranya Laptop, GPS Tiny Parallax, Modul Radio 3DR V2, Servo, antena Yagi 433 MHz dan Arduino.
3.2.2.1 DCcduino UNO
DCcduino UNO adalah papan mikrokontroler berbasiskan ATmega328. DCcduino UNO merupakan arduino uno revisi 3. Adapun spesifikasi dari DCcduino UNO dapat dilihat pada Tabel 3.1.
Tabel 3.1 Spesifikasi Dccduino UNO
DC Current for 3.3V Pin 50 mA
Flash Memory 32 KB (ATmega328) of which 0.5 KB used bybootloader
SRAM 2 KB (ATmega328)
EEPROM 1 KB (ATmega328)
Clock Speed 16 MHz
Papan Arduino ATmega328 atau DCcduino UNO dapat dilihat pada Gambar 3.1.
Gambar 3.1 Board DCcduino Uno
3.2.2.2 RF Modul 3DR V2
Modul Radio Frekuensi yang digunakan adalah produk dari Parallax yaitu Parallax 433 RF Transmitter dan Parallax 433 RF Receiver. Gambar 3.2 menunjukkan gambar modul radio 3DR V2 433 MHz.
Gambar 3.2 Modul Radio 3DR V2 433 MHz
Tabel 3.2 memaparkan beberapa spesifikasi dari Modul RF yang terdiri dari Receiver dan Transmitter.
Tabel 3.2 Spesifikasi Modul Radio 3DR V2 433 MHz
Supply voltage 3.7-6 VDC (from USB or DF13 connector)
Transmit current 100 mA at 20 dBm
Receive current 25 mA
Serial interface 3.3 V UART
Size 25.5x 53x11 mm (without antenna)
Weight 11.5g (without antenna)
RF Modul 3DR V2 memiliki 6 Pin, dimana penjelasan mengenai fungsi dari setiap Pin dapat dilihat pada Gambar 3.3.
Gambar 3.3 Pin-Out Modul Radio 3DR V2
3.2.2.3 Motor Servo
Motor servo dikendalikan dengan memberikan sinyal modulasi lebar pulsa (Pulse Wide Modulation / PWM) melalui kabel kontrol. Lebar pulsa sinyal kontrol yang diberikan akan menentukan posisi sudut putaran dari poros motor servo. Adapun spesifikasi motor servo yang digunakan dalam tugas akhir dapat dilihat pada Tabel 3.3.
Tabel 3.3 Spesifikasi Motor Servo
Spesifikasi Keterangan
Modulation Analog
Torque 4.8V: 44.0 oz-in (3.17 kg-cm) 6.0V: 57.0 oz-in (4.10 kg-cm)
6.0V: 0.19 sec/60°
GPS(Global Positioning System) adalah perangkat yang digunakan untuk mendapatkan posisi suatu tempat melalui komunikasi satellite. Pada tugas akhir ini GPS yang digunakan adalah GPS Tiny Parallax seperti pada Gambar 3.4.
Gambar 3.4 GPSTiny Parallax
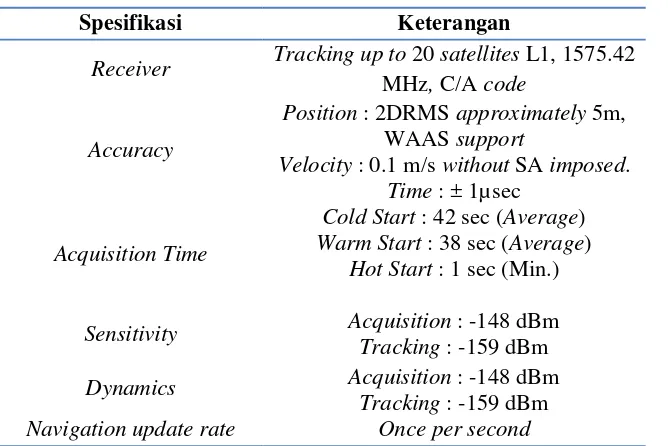
Ada pun spesifikasi dari GPS ini dapat dilihat pada Tabel 3.4. Tabel 3.4 Spesifikasi GPS Tiny Parallax
Spesifikasi Keterangan
Receiver Tracking up to 20 satellites L1, 1575.42 MHz, C/A code
Accuracy
Position : 2DRMS approximately 5m, WAAS support
Sensitivity Acquisition : -148 dBm Tracking : -159 dBm
Dynamics Acquisition : -148 dBm
Serial port TTL
Baud rate 4800 bps
Output Message NMEA0183 V2.2
GGA,GSV,GSA,RMC
Power supply DC 3.3V – 5V
3.3 Gambaran Umum Sistem
Diagram blok rancang bangun sistem Autotracking antena Yagi dapat dilihat pada Gambar 3.5.
3DR V2 Antena Yagi 3DR V2 Arduino
Motor Servo Gambar 3.5 Diagram Blok Sistem Autotracking Antena Yagi
diubah kedalam bentuk sudut azimuth oleh mikrokontroler arduino pada blok kedua. Jika data telah menjadi bentuk sudut azimuth, maka Arduino akan memerintahkan motor servo untuk bergerak kearah dimana posisi muatan berada berdasarkan data GPS yang dikirimkan dari blok muatan. Jika arah antena yagi sudah sama dengan posisi muatan, maka servo akan berhenti. Blok kedua diinisalisasi dengan nama blok pengamat.
3.4 Langkah Pengerjaan Sistem AutoTracking Antena Yagi 433 MHz Menggunakan Data GPS
Merancang Perangkat Keras Mengkonfigurasi Modul Radio
3DR V2
Merancang Software berbasis Arduino untuk sistem tracking
Melakukan P engujian terhadap sistem
tracking dengan data GPS
Gambar 3.6 Diagram Alir Perancangan Sistem Autotracking Antena Yagi 433 MHz mengunakan Data GP
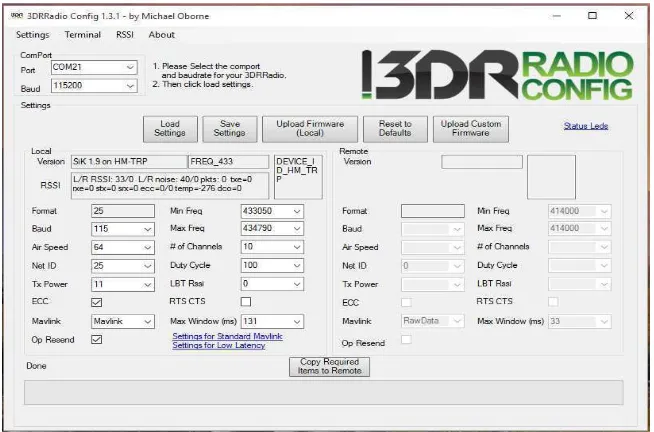
3.4.1 Konfigurasi Modul Radio 3DR V2
Konfigurasi dilakukan untuk mematchingkan antara perangkat modul radio 3DR untuk sisi penerima(receiver) dan pengirim(transmitter). Adapun langkah-langkah mengkonfigurasi modul radio 3DR V2 antara lain :
1. Hubungkan kedua modul radio ke laptop atau pc 2. Buka aplikasi Software 3DRRadio Config 1.3.1
3. Pilih salah satu port yang terhubung pada laptop atau pc 4. Pilih Load Setting
Gambar 3.7 Tampilan 3DRRadio Config 1.3.1 setelah di Load Setting 6. Pilih Save Setting, kemudian pilih Copy Required Items to Remote 7. Kemudian pilih port satu lagi yang terhubung di laptop atau pc
8. Pilih Load Setting, kemudian samakan nilai baud, Net ID, Air Speed dan #of Channels seperti pada modul radio pertama
9. Pilih Save Setting untuk menyimpan data pada modul radio kedua 10.Kedua modul radio sudah bisa dikomunikasikan.
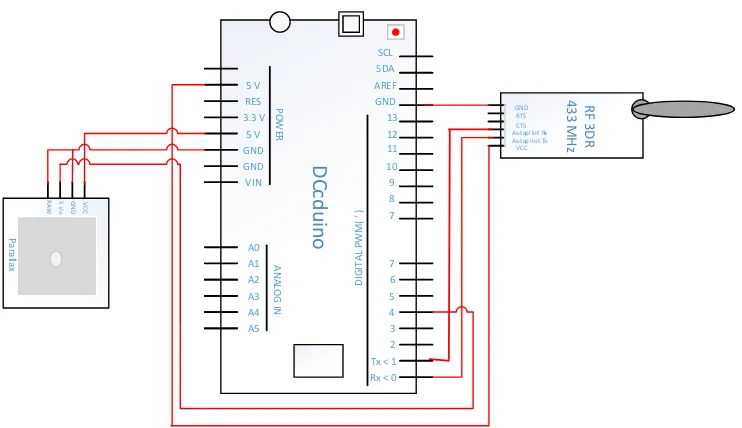
3.4.2 Perancangan Perangkat Keras
D
Gambar 3.8 Rangkaian untuk muatan dengan perangkat GPS
NANO
Gambar 3.9 Rangkaian untuk sistem tracking
ke pin 5V, pin GND dan RAW terhubung ke pin GND dan pin S I/O terhubung ke pin Digital 4. Kemudian pada modul radio terdapat enam pin, tetapi untuk tugas akhir ini hanya tiga pin yang akan digunakan, pin VCC, pin ground dan pin autopilot Tx. Pin VCC terhubung pada pin 5V, pin ground terhubung pada pin GND, pin autopilot Tx terhubung pada pin Rx<0 dan pin autopilot Rx terhubung pada pin Tx<1.
Gambar 3.9 menggambarkan bentuk rangkaian untuk sistem tracking pada tugas akhir ini. Pada rangkaian ini terdapat tiga perangkat, dimana motor servo dan modul radio 3DR V2 terhubung pada satu mikrokontroller arduino. Pada modul radio terdapat enam pin, tetapi untuk tugas akhir ini hanya tiga pin yang akan digunakan, pin VCC, pin ground dan pin autopilot Rx. Pin VCC terhubung pada pin 5V, pin ground terhubung pada pin GND, pin autopilot Rx terhubung pada pin Tx<1 dan pin autopilot Tx terhubung pada pin Rx<0.. Servo merupakan perangkat yang akan menggerakkan antena yagi kearah dimana posisi muatan berada. Ada tiga pin yang ada pada servo, pin VCC terhubung ke pin 5V, pin GND terhubung ke pin GND dan pin PWM terhubung ke pin D2.
Gambar 3.10 Tampilan Muatan dan Antena Pengamat
3.4.3 Perancangan Perangkat Lunak
Perangkat lunak dibuat dengan menggunakan bahasa pemrograman untuk Arduino. Diagram alir perangkat lunak yang dirancang untuk sistem autotracking antena Yagi dapat dilihat pada Gambar 3.11. Ketika alat ini diberikan daya, Arduino Uno akan menginisialisasi variable yang akan digunakan dalam program dan memulai komunikasi serial.
Pada muatan, GPS akan membaca posisi muatan. Kemudian data posisi yang diperoleh GPS akan dikirimkan ke pengamat melalui komunikasi serial kedua modul radio 3DR V2. Untuk mengetahui keadaan data sudah terkirim atau belumnya dapat dilihat pada port serial yang terhubung pada pengamat.
mulai
BAB IV
HASIL PENGUJIAN DAN ANALISA SISTEM
4.1 Umum
Di dalam bab ini akan dilakukan pengujian terhadap rancangan sistem autotracking antena yagi frekuensi 433 MHz menggunakan data GPS. Pengujian yang dilakukan pada rancangan sistem ini bertujuan untuk mengetahui proses kerja, kinerja, dan hasil sistem apakah telah bekerja sesuai dengan yang diharapkan atau tidak. Muatan yang digunakan terdiri dari modul radio 3DR V2, mikrokontroler Arduino, GPS dan Kompas. Muatan ini akan mengirimkan data ke antena stasiun penerima melalui frekuensi komunikasi 433 MHz. Pengujian dilakukan dengan cara mengubah-ubah posisi dari muatan, dimana muatan diposisikan random di tiga tempat berbeda, yang setiap posisi dilakukan lima kali percobaan. Selanjutnya akan dilihat berapa besar kesalahan pengarahan antena stasiun penerima terhadap muatan. Skema pengujian sistem autotracking dapat dilihat pada Gambar 4.1.
Gambar 4.1 Skema Pengujian Sistem Autotracking Untuk Antena Unidirectional 433 MHz
4.2 Hasil Pengujian Sistem
pengujian yang didapat dari sistem autotracking antena Yagi 433MHz menggunakan data posisi GPS.
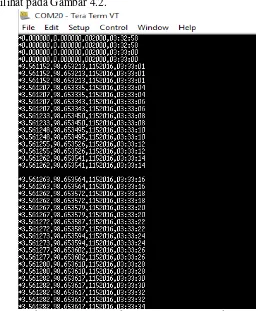
4.2.1 Posisi Pengamat pada Koordinat 3.561263°, 98.653564°. Hasil pembacaan data GPS untuk mengetahui posisi pengamat dapat dilihat pada Gambar 4.2.
Gambar 4.2 Data Koordinat Posisi Pengamat dari GPS
Gambar 4.2 menunjukkan data yang diperoleh dari hasil pengujian sistem bahwa posisi pengamat terletak pada koordinat latitude 3.561263° dan longitude 98.653564°.
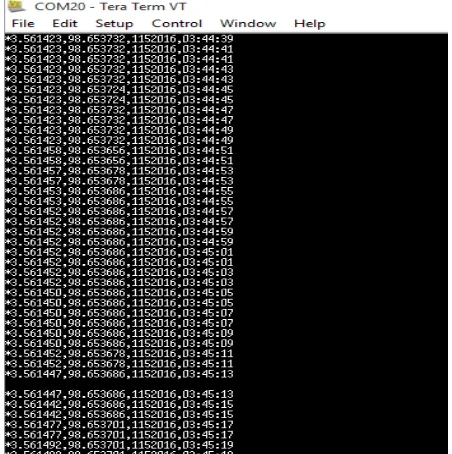
Gambar 4.3 Data Koordinat Posisi Pertama Muatan dari GPS
Gambar 4.3 menunjukkan data yang diperoleh dari hasil pengujian sistem bahwa posisi pertama muatan terletak pada koordinat latitude 3.561423° dan longitude 98.653732°. Posisi muatan dapat dilihat pada Gambar 4.4.
Gambar 4.4 Posisi Pertama Muatan tampak di lapangan
azimuth adalah 44° dan untuk besar sudut bearing adalah 46°. Dapat dilihat pada Gambar 4.5.
Gambar 4.5 Tampilan dari Terminal Arduino Hasil pengujian dapat dilihat pada Tabel 4.1.
Tabel 4.1 Hasil Pengujian pada posisi muatan pertama
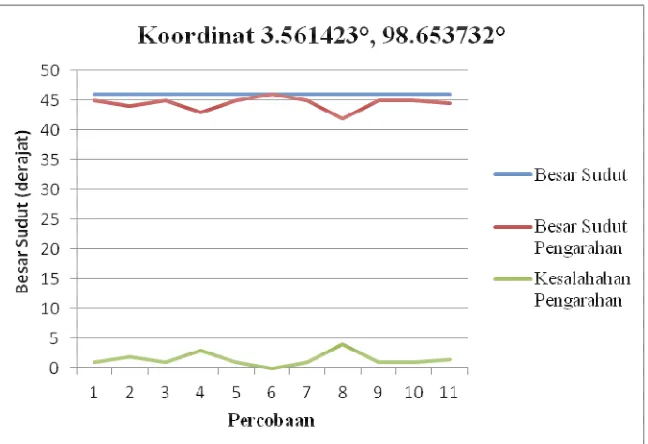
Gambar 4.6 Grafik hasil pengujian untuk posisi pertama
Gambar 4.6 menjelaskan bahwa percobaan dilakukan lima kali dengan besar referensi(azimuth) sebesar 46°. Untuk besar sudut yang diperoleh dari hasil pegujian dapat dilihat pada garis merah dengan rata-rata besar sudut 44.5° . Besar kesalahan pengarahan ditampilkan pada garis hijau, dimana rata-rata besar kesalahan pengarahan sebesar 1.5°.
4.2.3 Muatan Pada Koordinat 3.561458°, 98.653800°
Gambar 4.7 Data Koordinat Posisi Kedua Muatan dari GPS
Gambar 4.7 menunjukkan data yang diperoleh dari hasil pengujian sistem bahwa posisi kedua muatan terletak pada koordinat latitude 3.561458° dan posisi longitude 98.653800°. Posisi muatan dapat dilihat pada Gambar 4.8.
Setelah data diterima maka servo akan diperintahkan oleh mikrokontroler arduino untuk mengarahkan antena yagi kearah muatan, dalam hal ini arah yang dituju merupakan konversi dari besar sudut. Dimana diperoleh besar sudut azimuth adalah 40° dan untuk besar sudut bearing adalah 50°. Dapat dilihat pada Gambar 4.9.
Gambar 4.9 Tampilan dari Terminal Arduino
Hasil pengujian dapat dilihat pada Tabel 4.2.
Tampilan data pada grafik untuk hasil tracking muatan pada posisi kedua dapat dilihat pada Gambar 4.10.
Gambar 4.10 Grafik hasil pengujian untuk posisi kedua
Gambar 4.10 menjelaskan bahwa percobaan dilakukan lima kali dengan besar referensi(azimuth) sebesar 50°. Untuk besar sudut yang diperoleh dari hasil pegujian dapat dilihat pada garis merah dengan rata-rata besar sudut 49° . Besar kesalahan pengarahan ditampilkan pada garis hijau, dimana rata-rata besar kesalahan pengarahan sebesar 1°.
4.2.4 Muatan Pada Koordinat 3.561232°, 98.653923°.
Gambar 4.11. Data Koordinat Posisi Ketiga Muatan dari GPS
Gambar 4.11 menunjukkan data yang diperoleh dari hasil pengujian sistem bahwa posisi ketiga muatan terletak pada koordinat latitude 3.561232° dan posisi longitude 98.653923°. Posisi muatan dapat dilihat pada Gambar 4.12.
Setelah data diterima maka servo akan diperintahkan oleh mikrokontroler arduino untuk mengarahkan antena Yagi kearah muatan, dalam hal ini arah yang dituju merupakan konversi dari besar sudut. Dimana diperoleh besar sudut azimuth adalah 77° dan untuk besar sudut bearing adalah 13°. Dapat dilihat pada Gambar 4.13.
Gambar 4.13 Tampilan dari Terminal Arduino
Hasil pengujian dapat dilihat pada Tabel 4.3.
Rata-Rata 3.561232° 98.653923° 13° 11.9° 1.3° Tampilan data pada grafik untuk hasil tracking muatan pada posisi ketiga dapat dilihat pada Gambar 4.14.
Gambar 4.14 Grafik hasil pengujian untuk posisi ketiga
Gambar 4.14 menjelaskan bahwa percobaan dilakukan lima kali dengan besar referensi(azimuth) sebesar 13°. Untuk besar sudut yang diperoleh dari hasil pegujian dapat dilihat pada garis merah dengan rata-rata besar sudut 11.9° . Besar kesalahan pengarahan ditampilkan pada garis hijau, .dimana rata-rata besar kesalahan pengarahan sebesar 1.3°.
4.3 Analisis Data
Berikut ini adalah analisis dari hasil pengujian sistem autotracking antena Yagi 433 MHz dengan data posisi GPS.
Untuk posisi muatan pertama terletak pada koordinat latitude 3.561423° dan longitude 98.653732°, dari 10 kali percobaan didapat besar sudut pengarahan adalah 44.50 dan kesalahan pengarahan adalah 1.50.
Untuk posisi muatan kedua terletak pada koordinat latitude 3.561458° dan longitude 98.653800°, dari 10 kali percobaan didapat besar sudut
pengarahan adalah 490 dan kesalahan pengarahan adalah 10.
Untuk posisi muatan ketiga terletak pada koordinat latitude 3.561232° dan longitude 98.653923°, dari 10 kali percobaan didapat besar sudut
Table 4.4 menjelaskan perbandingan besar kesalahan antara tracking kuat sinyal dengan tracking menggunakan data GPS[15].
Tabel 4.4 Perbandingan Besar Kesalahan Pengarahan Tracking dengan data GPS dan Kuat Sinyal
Percobaan dibandingkan dengan tracking dengan kuat sinyal yang memiliki besar kesalahan pengarahan 7.2°. Pada posisi 3 untuk tracking dengan data GPS memiliki besar kesalahan pengarahan 1.3° lebih baik dibandingkan dengan tracking dengan kuat sinyal yang memiliki besar kesalahan pengarahan 8.4°.
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Adapun beberapa kesimpulan dari pembahasan pada Tugas Akhir ini adalah sebagai berikut.
1. Besar Kesalahan pengarahan pada koordinat latitude 3.561423°, longitude 98.653732° sebesar 1.5°
2. Besar Kesalahan pengarahan pada koordinat latitude 3.561458°, longitude 98.653800° sebesar 1°
3. Besar Kesalahan pengarahan pada koordinat latitude 3.561232°, longitude 98.653923° sebesar 1.3°
4. Kesalahan pengarahan rata-rata dari sistem autotracking yang dirancang adalah 1.267°, dimana kesalahan pengarahan terbesar adalah 1.50 dan kesalahan pengarahan terkecil adalah 10
5. Tracking menggunakan data GPS lebih baik dibangdingkan tracking menggunakan kuat sinyal.
5.2 Saran
Adapun saran dari Tugas Akhir ini adalah sebagai berikut.
1. Membuat rancang bangun sistem autotracking antena unidirectional menggunakan data GPS dengan mempertimbangkan sudut elevasi.
BAB II
TEORI DASAR
2.1 Umum
Kualitas suatu sistem komunikasi sangat ditentukan oleh kuat sinyal yang diterima. Salah satu cara agar sinyal dapat diterima secara maksimal adalah dengan mengarahkan antena penerima tepat ke antena pengirim. Pengarahan antena akan mudah dilakukan jika target yang dituju tetap atau tidak bergerak, kita hanya perlu mengetahui posisi target lalu mengarahkan antena ke posisi tersebut[1].
Jika target yang dituju dapat bergerak, maka diperlukan suatu sistem tracking untuk mengarahkan antena. Sistem tracking yang dibuat umumnya menggunakan kuat sinyal sebagai referensi sebagai pengarah. Sistem tracking adalah suatu sistem yang memungkinkan antena penerima untuk mendeteksi antena pengirim lalu mengarahkan antena tersebut. Sistem tracking digunakan untuk mempertahankan level sinyal yang diterima pada level tertentu[2].
2.2 Gelombang Elektromagnetik
(2.1)
Kecepatan (ν) bergantung pada medium. Ketika medium rambat adalah hampa udara (free space), seperti pada persamaan 2.2[3]:
v = c = 3 x 108 m/s (2.2) Salah satu spektrum frekuensi gelombang elektromagnetik adalah gelombang radio. Pembagian spektrum frekuensi gelombang radio dapat ditunjukkan pada Tabel 2.1.
Tabel 2.1 Spektrum Frekuensi Gelombang Radio Nama Band Singkatan Band
2.3 Antena
Antena adalah perangkat media transmisi wireless (nirkabel) yang memanfaatkan udara atau ruang bebas sebagai media penghantar. Antena mempunyai fungsi untuk merubah energi elektromagnetik terbimbing menjadi gelombang elektromagnetik ruang bebas (gelombang mikro) yang merupakan fungsi antena sebagai transmitter(Tx). Energi listrik dari transmitter dikonversi menjadi gelombang elektromagnetik dan oleh sebuah antena yang kemudian gelombang tersebut dipancarkan menuju udara bebas. Pada receiver(Rx) akhir gelombang elektromagnetik dikonversi menjadi energi listrik dengan menggunakan antena. Gambar 2.1 menunjukkan antena sebagai pengirim dan penerima.
Gambar 2.1 Antena Sebagai Pengirim dan Penerima
2.3.1 Parameter Karateristik Antena
Parameter karakteristik antena digunakan untuk menguji atau mengukur performa antena yang akan digunakan. Berikut penjelasan beberapa parameter antena yang sering digunakan yaitu direktivitas antena, gain antena, pola radiasi antena, beamwidth antena, bandwidth antena, impedansi antena dan voltage standing wave ratio (VSWR).
Antena Antena
Gelombang Elektromagnetik
2.3.1.1 Direktivitas Antena
Keterarahan dari suatu antena didefinisikan sebagai ”perbandingan antara intensitas radiasi maksimum dengan intensitas radiasi dari antena referensi isotropis”. Keterarahan dari sumber non-isotropis adalah sama dengan perbandingan intensitas radiasi maksimumnya di atas sebuah sumber isotropis[4]. Keterarahan pada antena secara umum dinyatakan dari Persamaan 2.3[4]:
rad
Umax = intensitas radiasi maksimum (watt)
Prad = daya radiasi total (watt)
2.3.1.2 Gain Antena
Gain (directive gain) adalah karakter antena yang terkait dengan kemampuan antena mengarahkan radiasi sinyalnya atau penerimaan sinyal dari arah tertentu. Gain bukanlah kuantitas yang dapat diukur dalam satuan fisis pada umumnya seperti watt, ohm, atau lainnya, melainkan suatu bentuk perbandingan. Oleh karena itu, satuan yang digunakan untuk gain adalah decibel [4].
Gain dari sebuah antena adalah kualitas nyala yang besarnya lebih kecil daripada penguatan antena tersebut yang dapat dinyatakan pada persamaan 2.4[5] :
Dimana :
k = efisiensi antena, 0 ≤ k ≤1
Gain antena dapat diperoleh dengan mengukur power pada main lobe dan membandingkan power-nya dengan power pada antena referensi. Gain antena diukur dalam satuan decibel. Decibel dapat ditetapkan dengan dua cara yaitu [4] :
a. Ketika mengacu pada pengukuran daya (power)
(2.5)
b. Ketika mengacu pada pengukuran tegangan (volt)
(2.6)
Gain antena biasanya diukur relatif pada : 1) dBi (relatif pada radioator isotropic) 2) dBd (relatif pada radioator dipole)
Hubungan antara dBi dan dBd dapat dilihat pada persamaan 2.7[5] :
0 dBd = 2,15 dBi (2.7) Umumnya dBi digunakan untuk mengukur gain sebuah antena.
Gain dapat dihitung dengan membandingkan kerapatan daya maksimum antena yang diukur dengan antena referensi yang diketahui gainnya. Maka dapat dituliskan pada persamaan 2.8[4]:
(2.8)
Gt = Gain total antena.
Pt = Nilai level sinyal maksimum yang diterima antena terukur (dBm). Ps = Nilai level sinyal maksimum yang diterima antena referensi (dBm). Gs = Gain antena referensi.
2.3.1.3 Pola Radiasi Antena
Pola radiasi dari sebuah antena didefinisikan sebagai fungsi matematis atau gambaran secara grafis dari karakteristik radiasi sebuah antena sebagai fungsi dari koordinat ruang. Pada kasus secara keseluruhan, pola radiasi dihitung/diukur pada medan jauh dan digambarkan kembali sebagai koordinat arah. Karakteristik radiasi mencakup rapat flux daya, intensitas radiasi, kuat medan, keterarahan/direktivitas, fasa atau polarisasi. Karakteristik radiasi yang menjadi pusat perhatian adalah distribusi energi radiasi dalam ruang 2 dimensi maupun 3 dimensi sebagai fungsi dari posisi pengamat di sepanjang jalur dengan jari-jari yang konstan. Contoh koordinat yang sesuai diperlihatkan pada Gambar 2.2[4].
Gambar 2.2 Sistem Koordinat Untuk Menganalisis Antena
Beamwidth adalah besarnya sudut berkas pancaran gelombang frekuensi radio utama (main lobe) yang dihitung pada titik 3 dB menurun dari puncak lobe utama [5]. Besarnya beamwidth dapat dihitung dengan persamaan 2.10[6] :
(2.10)
Dimana :
B = 3 dB beamwidth (derajat)
= frekuensi (GHz)
d = diameter antena (m)
Gambar 2.3 menunjukkan tiga daerah pancaran yaitu lobe utama (main lobe, nomor 1), lobe sisi samping (side lobe, nomor 2) dan lobe sisi belakang (back lobe, nomor 3).
Gambar 2.3 Beamwidth Antena
Half Power Beamwidth (HPBW) adalah daerah sudut yang dibatasi oleh titik-titik setengah daya atau -3 dB atau 0.707 dari medan maksimum pada lobeutama. First Null Beamwidth (FNBW) adalah besar sudut bidang diantara dua arah pada main lobe yang intensitas radiasinya nol
Bandwidth suatu antena didefinisikan sebagai rentang frekuensi dimana kerja yang berhubungan dengan berapa karakteristik (seperti impedansi masukan, pola, beamwidth, polarisasi, gain, efisiensi, VSWR, return loss, axial ratio) memenuhi spesifikasi standar [4]. Gambar 2.4 menunjukkan bandwidth antena.
Gambar 2.4 Bandwidth Antena
Dari Gambar 2.4 diketahui f1 adalah frekuensi bawah, f2 adalah frekuensi
atas dan fc merupakan frekuensi tengah. Dengan melihat Gambar 2.4 bandwidth
dapat dicari dengan menggunakan persamaan 2.11[5] :
(2.11)
Bandwidth yang dinyatakan dalam persen seperti ini biasanya digunakan untuk menyatakan bandwidth antena yang memiliki band sempit (narrow band). Sedangkan untuk band yang lebar (broad band) biasanya digunakan definisi rasio antara batas frekuensi atas dengan frekuensi bawah.
2.3.1.6 Impedansi Antena
perbandingan antara tegangan terhadap arus pada terminal tersebut. Seperti pada
V = beda potensial terminal (volt) I = arus terminal (ampere)
2.3.1.7 Voltage Standing Wave Ratio (VSWR)
VSWR adalah perbandingan antara amplitudo gelombang berdiri (standing wave) maksimum (|V|max) dengan minimum (|V|min). Pada saluran transmisi ada dua komponen gelombang tegangan, yaitu tegangan yang dikirimkan (V0+) dan tegangan yang direfleksikan (V0-). Pebandingan tegangan yang direfleksikan dengan yang dikirimkan disebut sebagai koefisien refleksi tegangan (Γ) [4] :
(2.13)
di mana ZL adalah impedansi beban (load) dan Z0 adalah impedansi saluran.
Rumus untuk mendari VSWR adalah [4] :
Kondisi yang baik adalah ketika VSWR bernilai 1, yang berarti tidak ada refleksi ketika saluran dalam keadaan matching sempurna. Namun, kondisi ini kenyataannya sulit diperoleh. Oleh karena itu, nilai standar VSWR yang diijinkan dalam perancangan antena adalah ≤ 2.
2.3.2 Antena Unidirectional
Antena unidirectional memancarkan dan menerima sinyal hanya dari satu arah. Antena unidirectional mempunyai kemampuan direktivitas yang lebih dibandingkan jenis–jenis antena lainnya. Kemampuan direktivitas ini membuat antena ini lebih banyak digunakan untuk koneksi jarak jauh. Dengan kemampuan direktivitas ini membuat antena mampu mendengar sinyal yang relatif kecil dan mengirimkan sinyal lebih jauh. Umumnya antena unidirectional mempunyai spesifikasi gain tinggi tetapi beamwidth kecil. Hal ini menguntungkan karena kecilnya beamwidth menyebabkan berkurangnya derau yang masuk kedalam antena. Semakin kecil bidang tangkapan(aperture), semakin naik selektivitas antena terhadap sinyal wireless yang berarti semakin sedikit derau yang ditangkap oleh antena tersebut[7].
Beberapa macam antena unidirectional antara lain antena Yagi-Uda, antena parabola, antena helix, antena log-periodik, dan lain–lain. Gambar 2.5 salah satu jenis antena unidirectional yaitu antena Yagi-Uda.
2.4 Arduino
Arduino adalah kit elektronik atau papan rangkaian elektronik open source yang didalamnya terdapat komponen utama yaitu sebuah chip mikrokontroler dengan jenis AVR. Mikrokontroler itu sendiri adalah chip atau IC (integrated circuit) yang bisa diprogram menggunakan komputer. Tujuan menanamkan program pada mikrokontroler adalah agar rangkaian elektronik dapat membaca input, memproses input tersebut dan kemudian menghasilkan output sesuai yang diinginkan. Jadi mikrokontroler bertugas sebagai ‘otak’ yang mengendalikan input, proses dan output sebuah rangkaian elektronik. Karena komponen utama Arduino adalah mikrokontroler, maka Arduino dapat diprogram menggunakan komputer sesuai kebutuhan kita. Arduino tidak perlu perangkat chip programmer karena didalamnya sudah ada bootloader yang akan menangani upload program dari komputer. Sudah memiliki sarana komunikasi USB, sehingga pengguna laptop yang tidak memiliki port serial/RS323 bisa menggunakannya. Bahasa pemrograman relatif mudah karena software Arduino dilengkapi dengan kumpulan library yang cukup lengkap[8]. Memiliki modul siap pakai (shield) yang bisa ditancapkan pada board Arduino. Misalnya shield GPS, Ethernet, SD Card, dll.
Secara umum Arduino terdiri dari dua bagian, yaitu:
Gambar 2.6 Arduino Nano
2. Software = Software Arduino meliputi IDE untuk menulis program, driver untuk koneksi dengan komputer, contoh program dan library untuk pengembangan program. Gambar 2.7 merupakan Tampilan Software Arduino IDE.
Gambar 2.7 Tampilan Software Arduino IDE
2.5 Motor Servo
Gambar 2.8 Motor Servo
Motor ini terdiri dari sebuah motor DC, serangkaian gear, potensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan batas sudut dari putaran servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui pin sinyal dari kabel motor.
Secara umum terdapat 2 jenis motor servo, yaitu motor servo standard dan motor servo Continous. Servo motor tipe standar hanya mampu berputar 180 derajat. Sedangkan servo motor continuous dapat berputar sebesar 360 derajat. Pada badan servo tertulis tipe servo yang bersangkutan[8].
Untuk menggerakkan motor servo ke kanan atau ke kiri, tergantung dari nilai delay yang diberikan. Untuk membuat servo pada posisi center, berikan pulsa 1ms sampai dengan 20 ms. Untuk memutar servo ke kanan, berikan pulsa <=1 ms, dan pulsa >= 2 ms untuk berputar ke kiri dengan delay 1 ms, seperti Gambar 2.9.
Gambar 2.9 Menggerakkan motor servo ke kanan atau ke kiri
GPS atau Global Positioning System, merupakan sebuah alat atau sistem yang dapat digunakan untuk menginformasikan penggunanya berada (secara global) di permukaan bumi yang berbasiskan satelit. Data dikirim dari satelit berupa sinyal radio dengan data digital.
2.6.1 Sistem koordinat pada GPS
Koordinat Geografi diukur dalam lintang dan bujur dalam besaran derajat desimal, derajat menit desimal, atau derajat menit detik. Lintang diukur terhadap ekuator sebagai titik NOL (0° sampai 90° positif kearah utara dan 0° sampai 90° kearah selatan). Bujur diukur berdasarkan titik NOL di greenwich (0° sampai 180° kearah timur dan 0° sampai 180° kearah barat)[10]. Gambar 2.10 merupakan tampak globe yang menunjukan letak lintang dan bujur pada bumi[10].
Gambar 2.10 Sistem Koordinat Latitude dan Longitude
1. Koordinat yang mengandung derajat (degree), menit (minutes), dan detik (seconds), disebut juga DMS.
Format: derajat menit detik koma detik (dd mm ss.ss) Contoh: 40:26:46.302N 79:56:55.903W
Arti: Pada Lintang Utara (Latitude North) 40 derajat 26 menit 46,302 detik, Pada Bujur Barat (Longitude West) 79 derajat 56 menit 55,903 detik.
2. Koordinat yang mengandung derajat (degree) dan menit (minutes), disebut juga MinDec.
Format: derajat menit koma menit (dd mm.mmmm) Contoh: 76° 77.4564, -54° 34.5657
Arti : Pada Lintang Utara 76 derajat 77,4564 menit, Pada Bujur Barat 54 derajat 34,5657 menit.
3. Koordinat yang mengandung derajat saja (DegDec) Format: derajat koma derajat (dd.dddddd)
Contoh: -06.257508 , 106.745980
Arti: Pada Lintang Selatan 6, 257508 derajat, Pada Bujur Timur 106,745980 derajat.
2.7 Azimuth dan Bearing
Bearing merupakan satu sistem penentuan arah garis dengan memakai sebuah sudut dan huruf-huruf kuadran. Sudutnya diukur dari utara maupun selatan ke arah timur ataupun barat, untuk menghasilkan sudut kurang dari 90°[13]. Gambar 2.11 menunjukkan perbedaan antara Bearing dan Azimuth.
Gambar 2.11 Azimuth dan Bearing
2.8 Kompas
Kompas adalah alat navigasi untuk menentukan arah berupa sebuah panah penunjuk magnetis yang bebas menyelaraskan dirinya denganmedan magnet bumi secara akurat. Kompas memberikan rujukan arah tertentu, sehingga
sangat membantu dalam bidang navigasi. Arah mata angin yang ditunjuknya adalah utara, selatan, timur, dan barat[14].
2.9 Tracking Antena
Pergerakan muatan dapat menimbulkan masalah pada sisi stasiun bumi. Hal ini terjadi karena untuk dapat menerima data dengan baik, stasiun bumi harus terarah ke muatan. Oleh karena itu, antena stasiun bumi harus memiliki mount yang dapat digerakkan dan sistem tracking. Mount antena yang biasa digunakan adalah EL/AZ mount yang memungkinkan antena untuk digerakkan ke arah atas-bawah dan kiri-kanan. Sistem tracking diperlukan pada situasi dimana sebuah jaringan komunikasi mengharuskan level sinyal yang diterima dan yang dikirimkan berada didalam batas tertentu. Sistem tracking akan mencari arah sinyal terkuat yang dikirimkan oleh muatan sehingga memungkinkan antena stasiun bumi untuk pointing ke muatan [2].
BAB I
PENDAHULUAN
1.1 Latar Belakang Masalah
Kualitas suatu sistem komunikasi sangat ditentukan oleh kuat sinyal yang diterima. Salah satu cara agar sinyal dapat diterima secara maksimal adalah dengan mengarahkan antena penerima tepat ke antena pengirim. Pengarahan antena akan mudah dilakukan jika target yang dituju tetap atau tidak bergerak.
Jika target yang dituju dapat bergerak, maka diperlukan suatu sistem tracking untuk mengarahkan antena. Sistem tracking yang dibuat umumnya menggunakan kuat sinyal sebagai referensi sebagai pengarah. Sistem ini tidak efektif dikarenakan kurangnya presisi pengarahan antena terhadap muatan.
Untuk itu dalam tugas akhir ini dibahas sistem autotracking untuk antena unidirectional dengan frekuensi operasi 433 MHz menggunakan data GPS(Global Positioning System) untuk meningkatkan presisi pengarahan.
1.2 Perumusan Masalah
Adapun rumusan masalah dari Tugas Akhir ini adalah sebagai berikut:
1. Bagaimana merancang agar antena stasiun penerima dapat senantiasa terarah ke muatan, sehingga stasiun penerima dapat menerima data yang dikirimkan dengan baik.
3. Berapa besar kesalahan pengarahan dari antena penerima terhadap posisi muatan.
1.3 Tujuan Tugas Akhir
Adapun tujuan dari Tugas Akhir ini adalah merancang bangun sistem autotracking pada antena Yagi yang mempunyai frekuensi operasi 433 MHz dengan menggunakan data GPS agar dapat mendeteksi dan mengarahkan antena stasiun penerima ke muatansecara akurat.
1.4 Batasan Masalah
Adapun batasan masalah pada Tugas Akhir ini adalah sebagai berikut :
1. Sistem autotracking antena yang digunakan berdasarkan data posisi dari GPS. 2. Antena yang digunakan untuk autotracking adalah antena Yagi dengan
frekuensi operasi 433 MHz.
3. Modul radio yang digunakan adalah 3DR V2 433MHz. 4. Modul GPS yang digunakan adalah GPSTiny Parallax 5. Motor penggerak yang digunakan adalah Motor Servo 180°.
6. Pengukuran dilakukan pada Gedung Magister Teknik Elektro Lantai 4 Departemen Teknik Elektro Universitas Sumatera Utara.
1.5 Metode Penelitian
1. Studi literatur.
Dengan membaca teori-teori yang berkaitan dengan topik Tugas Akhir yang terdiri dari buku-buku referensi baik yang dimilki oleh penulis atau dari perpustakaan dan juga dari artikel-artikel, jurnal, layanan internet, dan lain-lain.
2. Pemilihan peralatan kontrol.
Memilih peralatan kontrol yang sesuai untuk kondisi yang bersangkutan sehingga didapatkan hasil yang diinginkan.
3. Perancangan.
Merancang sistem autotracking antena yagi menggunankan data GPS melalui perhitungan terlebih dahulu, lalu membangun sistem tersebut.
4. Ujicoba dan pengukuran langsung.
Melakukan ujicoba secara umum terhadap sistem autotracking antena yagi yang telah dibangun dengan mengukur parameternya dengan alat ukur yang ada.
5. Implementasi dan analisa.
Melakukan implementasi secara langsung di lapangan dan menganalisa sistem autotracking antena yagi yang telah dibangun.
1.6 Sistematika Penulisan
BAB I PENDAHULUAN
Bab ini menguraikan tentang latar belakang masalah, rumusan masalah, tujuan penulisan, batasan masalah, metodologi penulisan, serta sistematika penulisan.
BAB II TEORI DASAR
Bab ini berisi penjelasan tentang antena, GPS, Servo, Arduino, Bearing, Azimuth dan Tracking antena.
BAB III PERANCANGAN SISTEM AUTOTRACKING ANTENNA YAGI FREKUENSI 433 MHz MENGGUNAKAN DATA GPS Bab ini berisi mengenai perancangan sistem autotracking antena Yagi frekuensi kerja 433 MHz dengan menggunakan data GPS.
BAB IV HASIL PENGUJIAN DAN ANALISA SISTEM
Bab ini berisi tentang hasil ujicoba sistem autotracking antena Yagi frekuensi kerja 433 MHz dengan menggunakan data GPS yang telah dibangun dan diimplementasikan di lapangan.
BAB V KESIMPULAN DAN SARAN
TUGAS AKHIR
RANCANG BANGUN SISTEM AUTOTRACKING ANTENA YAGI FREKUENSI 433 MHZ MENGGUNAKAN DATA GPS
Diajukan untuk memenuhi salah satu persyaratan dalam menyelesaikan Pendidikan Sarjana (S-1) pada Departemen Teknik Elektro
Oleh
ZHUHRI RAMADHANI PURBA NIM : 110402050
DEPARTEMEN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
ABSTRAK
Kualitas suatu sistem komunikasi sangat ditentukan oleh kuat sinyal yang diterima. Salah satu cara agar sinyal dapat diterima secara maksimal adalah dengan mengarahkan antena penerima tepat ke antena pengirim. Pengarahan antena akan mudah dilakukan jika target yang dituju tetap atau tidak bergerak, kita hanya perlu mengetahui posisi target lalu mengarahkan antena ke posisi tersebut. Dalam hal ini posisi target yang dituju dapat bergerak, oleh karena itu sistem tracking yang digunakan untuk mengarahkan antena. Pada tugas akhir ini sistem yang digunakan adalah sistem autotracking menggunakan data GPS(Global Positioning System). GPS akan membaca data Posisi muatan, kemudian data dikirimkan ke antena penerima dengan modul radio 433 MHz V2. Setelah data diterima maka servo akan diperintah melalui mikrokontroler arduino mengarah ke posisi muatan.
Hasil yang diperoleh dari pengujian bahwa besar kesalahan pengarahan antena terhadap muatan sebesar 1.5° untuk koordinat 3.561423°, 98.653732°. Kemudian pada koordinat 3.561458°, 98.653800° besar kesalahan pengarahan sudut sebesar 1 ° dan untuk koordinat 3.561232° dan 98.653923° besar kesalahan pengarahan sudut sebesar 1.3°. Rata-rata besar kesalahan pengarahan antena terhadap muatan sebesar 1.27°
KATA PENGANTAR
Puji syukur penulis haturkan kehadirat Allah S.W.T yang telah memberikan kemampuan dan kesehatan dalam menyelesaikan Tugas Akhir ini, serta shalawat beriring salam penulis sampaikan kepada junjungan umat Nabi Muhammad S.A.W.
Tugas Akhir ini merupakan bagian dari kurikulum yang harus diselesaikan untuk memenuhi persyaratan menyelesaikan pendidikan Sarjana Strata Satu di Departemen Teknik Elektro, Fakultas Teknik, Universitas Sumatera Utara. Adapun judul Tugas Akhir ini adalah :
“RANCANG BANGUN SISTEM AUTOTRACKING ANTENA YAGI FREKUENSI 433 MHZ MENGGUNAKAN DATA GPS”
Tugas Akhir ini penulis persembahkan kepada yang teristimewa yaitu ayahanda Sya’ban Purba dan ibunda Susi Merianti Hutagalung yang senantiasa memberikan perhatian dan kasih sayang sejak penulis lahir hingga sekarang, serta adik-adik tercinta Muhammad Nur Hakim Purba dan Isra Ardhiani Purba yang senantiasa mendukung dan memberi semangat.
Selama penulis menjalani pendidikan di kampus hingga diselesaikannya Tugas Akhir ini, penulis banyak menerima bantuan, bimbingan, dan dukungan dari berbagai pihak. Untuk itu dalam kesempatan ini penulis ingin mengucapkan terima kasih kepada :
2. Bapak Drs. Hasdari Helmi,M.T., selaku Penasehat Akademis penulis, atas bimbingan dan arahannya dalam melayani perkuliahan selama ini.
3. Bapak Ir. Surya Tarmizi Kasim, M.Si dan Bapak Rahmad Fauzi ST, MT selaku Ketua dan Sekretaris Departemen Teknik Elektro Fakultas Teknik Universitas Sumatera Utara.
4. Bapak Rahmat Fauzi, ST, MT dan Bapak Dr. Ali Hanafiah Rambe, ST, MT selaku dosen penguji Tugas Akhir, atas masukan dan bantuannya dalam penyempurnaan Tugas Akhir ini.
5. Seluruh staf pengajar yang telah memberi bekal ilmu kepada penulis dan seluruh pegawai Departemen Teknik Elektro, Fakultas Teknik, Universitas Sumatera Utara atas segala bantuannya.
6. Temen - teman Sub-Jurusan Telekomunikasi Teknik Elektro USU, Wahyudi, Hasan, Rido, Ikhyar, Ferdi, Ari, Surya, Faisal, dan Oktri yang selama ini membantu dan memfasilitasi penulis untuk menyelesaikan Tugas Akhir ini.
7. Teman – teman di Teknik Elektro FT-USU, terkhusus angkatan 2011 atas dukungan, do’a, suka dan duka selama di bangku perkuliahan.
8. Abang-abang senior yang selalu membantu, mendukung dan memberi masukan selama menjalani perkuliahan.
9. Keluarga Besar MME-GS yang telah memberikan banyak sekali pembelajaran.
10. Semua pihak yang tidak sempat penulis sebutkan satu per satu.
tujuan menyempurnakan dan mengembangkan kajian dalam bidang ini sangat penulis harapkan.
Akhir kata penulis berserah diri pada Allah SWT, semoga Tugas Akhir ini bermanfaat bagi pembaca sekalian terutama bagi penulis sendiri.
Medan, Januari 2016 Penulis
DAFTAR ISI
2.2 Gelombang Elektromagnetik ... 5
2.3.1.6 Impedansi Antena ... 12 FREKUENSI 433 MHz MENGGUNAKAN DATA GPS 3.1 Umum ... 22
3.4 Langkah Pengerjaan Sistem Autotracking Antena Yagi 433 MHz Menggunakan Data GPS ... 28
3.4.2 Perancangan Perangkat Keras ... 30
3.4.3 Perancangan Perangkat Lunak ... 32
BAB IV HASIL PENGUJIAN DAN ANALISIS SISTEM 4.1 Umum ... 34
4.2 Hasil Pengujian Sistem ... 35
4.2.1 Posisi Pengamat pada Koordinat 3.561178°, 98.653854° ... 35
4.2.2 Posisi Muatan pada Koordinat 3.561448°, 98.653869° ... 36
4.2.3 Posisi Muatan pada Koordinat 3.561293°, 98.653991° ... 38
4.2.4 Posisi Muatan pada Koordinat 3.561345°, 98.653793° ... 41
4.3 Analisa Data ... 44
BAB V KESIMPULAN DAN SARAN 5.1 Kesimpulan ... 46
5.2 Saran... 46
DAFTAR GAMBAR
Gambar 2.1 Antena Sebagai Pengirim dan Penerima ... 7
Gambar 2.2 Sistem Koordinat Untuk Menganalisis Antena ... 10
Gambar 2.3 Beamwidth Antena ... 11
Gambar 2.9 Menggerakkan Motor Servo kekanan atau kekiri ………… ... 17
Gambar 2.10 Sistem Koordinat Lalitude dan Longitude... 18
Gambar 2.11 Azimuth dan Bearing ... 20
Gambar 2.12 Tampilan Kompas dari Smartphone ... 20
Gambar 3.1 Board DCcduino Uno ... 24
Gambar 3.2 Modul Radio 3DR V2 433 MHz... 24
Gambar 3.3 Pin-Out Modul Radio 3DR V2 ... 25
Gambar 3.4 GPS Tiny Parallax ………...………. 26
Gambar 3.5 Diagram Blok Sistem Tracking Antena Yagi……… 27
Gambar 3.6 Diagram Alir Perancangan Sistem Tracking Antena Yagi 433 MHz mengunakan Data GPS ... 28
Gambar 3.7 Tampilan 3DRRadio Config 1.3.1 setelah di Load Setting ... 29
Gambar 3.8 Rangkaian untuk muatan dengan perangkat GPS………. 30
Gambar 3.10 Tampilan Muatan dan Antena pengamat……….. ... 32 Gambar 3.11 Diagram Alir Perangkat Lunak Sistem Tracking……….. 33 Gambar 4.1 Skema Pengujian Sistem Autotracking Untuk Antena
DAFTAR TABEL
Tabel 2.1 Spektrum Frekuensi Gelombang Radio……….. ... 6
Tabel 3.1 Spesifikasi DCcduino UNO……….. ... 23
Tabel 3.2 Spesifikasi Modul Radio 3DR V2 433 MHz………... 24
Tabel 3.3 Spesifikasi Motor Servo ……….. ... 25
Tabel 3.4 Spesifikasi GPS Tiny Parallax ……….. ... 26
Tabel 4.1 Hasil Pengujian Pada Posisi Muatan Pertama……….. .... 37
Tabel 4.2 Hasil Pengujian Pada Posisi Muatan Kedua ……….. ... 40
Tabel 4.3 Hasil Pengujian Pada Posisi Muatan Ketiga……….. ... 42