LAMPIRAN 1
Gambar 1. Transmisi roda gigi
Gambar 3. Roda gigi aus
Gambar 5. Roda gigi patah
Gambar 6. Rangkaian analisa pengukuran data getaran
Tabel. 1 Velocity Roda Gigi Normal 500 Rpm
Time Aksial Horizontal Vertikal
0,06 0,153372 0,156369 0,156968
0,12 0,144383 0,14678 0,151574
0,18 0,154571 0,156968 0,154571
0,24 0,150975 0,156968 0,15577
0,3 0,152773 0,156968 0,157568
0,36 0,150376 0,156968 0,156968
0,42 0,153972 0,156968 0,157568
0,48 0,153972 0,156968 0,157568
0,54 0,153372 0,157568 0,156968
0,6 0,153972 0,156369 0,156968
Tabel. 2 Velocity Roda Gigi Normal 600 Rpm
Time Aksial Horizontal Vertikal
0,06 0,153972 0,156369 0,156968
0,12 0,143783 0,147979 0,149777
0,18 0,153972 0,156369 0,156968
0,24 0,153972 0,157568 0,157568
0,3 0,154571 0,156968 0,157568
0,36 0,153972 0,156968 0,157568
0,42 0,153972 0,156968 0,156968
0,48 0,153972 0,156968 0,157568
0,54 0,153972 0,156369 0,156968
0,6 0,153972 0,156968 0,156968
Tabel. 3 Velocity Roda Gigi Normal 700 rpm
Time Aksial Horizontal Vertikal
0,06 0,153972 0,156968 0,157568
0,12 0,144383 0,147379 0,149777
0,18 0,150975 0,157568 0,15577
0,24 0,153972 0,157568 0,156968
0,3 0,151574 0,157568 0,15577
0,36 0,151574 0,156968 0,156968
0,42 0,152773 0,157568 0,157568
0,48 0,15577 0,156968 0,158766
0,54 0,153972 0,156968 0,157568
0,6 0,153972 0,157568 0,156968
0,06 0,153372 0,157568 0,157568
0,12 0,143783 0,146181 0,150975
0,18 0,154571 0,15517 0,156968
0,24 0,154571 0,15517 0,156968
0,3 0,154571 0,15517 0,157568
0,36 0,154571 0,158167 0,157568
0,42 0,153972 0,156968 0,157568
0,48 0,154571 0,157568 0,156369
0,54 0,154571 0,157568 0,156968
0,6 0,153972 0,156369 0,157568
Tabel. 5 Velocity Roda Gigi Normal 900 rpm
Time Aksial Horizontal Vertikal
0,06 0,152773 0,156968 0,15577
0,12 0,144383 0,147979 0,150376
0,18 0,154571 0,157568 0,156968
0,24 0,15517 0,157568 0,157568
0,3 0,154571 0,158167 0,157568
0,36 0,154571 0,157568 0,157568
0,42 0,153972 0,156968 0,157568
0,48 0,153972 0,157568 0,157568
0,54 0,153972 0,157568 0,156369
0,6 0,154571 0,156968 0,157568
Tabel. 6 Velocity Roda Gigi Normal 1000 rpm
Time Aksial Horizontal Vertikal
0,06 0,153972 0,157568 0,156369
0,12 0,144982 0,147379 0,150376
0,18 0,154571 0,158167 0,156968
0,24 0,154571 0,157568 0,157568
0,3 0,154571 0,156968 0,158167
0,36 0,154571 0,157568 0,157568
0,42 0,153972 0,157568 0,158167
0,48 0,154571 0,158167 0,157568
0,54 0,153972 0,15577 0,157568
0,6 0,154571 0,161763 0,156968
Tabel. 7 Velocity Roda Gigi Normal 1100 rpm
0,24 0,156369 0,157568 0,157568
0,3 0,15577 0,157568 0,158167
0,36 0,15517 0,156968 0,158167
0,42 0,156968 0,157568 0,158167
0,48 0,15517 0,157568 0,157568
0,54 0,151574 0,157568 0,158167
0,6 0,15577 0,157568 0,158167
Tabel. 8 Velocity Roda Gigi Normal 1200 rpm
Time Aksial Horizontal Vertikal
0,06 0,154571 0,157568 0,157568
0,12 0,144383 0,149777 0,150376
0,18 0,15517 0,159965 0,157568
0,24 0,15517 0,156369 0,157568
0,3 0,154571 0,156968 0,157568
0,36 0,154571 0,156369 0,158167
0,42 0,153972 0,153972 0,158167
0,48 0,154571 0,159965 0,157568
0,54 0,154571 0,158167 0,157568
0,6 0,154571 0,157568 0,158167
Tabel. 9 Torsional Vibration Roda Gigi Normal 500 rpm
Time Aksial Horizontal Vertikal
0,06 0,000638 0,000651 0,000653
0,12 0,000601 0,000611 0,000631
0,18 0,000643 0,000653 0,000643
0,24 0,000628 0,000653 0,000648
0,3 0,000636 0,000653 0,000656
0,36 0,000626 0,000653 0,000653
0,42 0,000641 0,000653 0,000656
0,48 0,000641 0,000653 0,000656
0,54 0,000638 0,000656 0,000653
0,6 0,000641 0,000651 0,000653
Tabel. 10 Torsional Vibration Roda Gigi Normal 600 rpm
Time Aksial Horizontal Vertikal
0,06 0,000539 0,000547 0,000549
0,12 0,000503 0,000518 0,000524
0,18 0,000539 0,000547 0,000549
0,24 0,000539 0,000551 0,000551
0,42 0,000539 0,000549 0,000549
0,48 0,000539 0,000549 0,000551
0,54 0,000539 0,000547 0,000549
0,6 0,000539 0,000549 0,000549
Tabel. 11 Torsional Vibration Roda Gigi Normal 700 rpm
Time Aksial Horizontal Vertikal
0,06 0,000467 0,000476 0,000477
0,12 0,000437 0,000447 0,000454
0,18 0,000457 0,000477 0,000472
0,24 0,000467 0,000477 0,000476
0,3 0,000459 0,000477 0,000472
0,36 0,000459 0,000476 0,000476
0,42 0,000463 0,000477 0,000477
0,48 0,000472 0,000476 0,000481
0,54 0,000467 0,000476 0,000477
0,6 0,000467 0,000477 0,000476
Tabel. 12 Torsional Vibration Roda Gigi Normal 800 rpm
Time Aksial Horizontal Vertikal
0,06 0,000412 0,000423 0,000423
0,12 0,000386 0,000392 0,000405
0,18 0,000415 0,000416 0,000421
0,24 0,000415 0,000416 0,000421
0,3 0,000415 0,000416 0,000423
0,36 0,000415 0,000424 0,000423
0,42 0,000413 0,000421 0,000423
0,48 0,000415 0,000423 0,00042
0,54 0,000415 0,000423 0,000421
0,6 0,000413 0,00042 0,000423
Tabel. 13 Torsional Vibration Roda Gigi Normal 900 rpm
Time Aksial Horizontal Vertikal
0,06 0,000369 0,00038 0,000377
0,12 0,000349 0,000358 0,000364
0,18 0,000374 0,000381 0,00038
0,24 0,000375 0,000381 0,000381
0,3 0,000374 0,000382 0,000381
0,6 0,000374 0,00038 0,000381
Tabel. 14 Torsional Vibration Roda Gigi Normal 1000 rpm
Time Aksial Horizontal Vertikal
0,06 0,00034 0,000348 0,000346
0,12 0,00032 0,000326 0,000332
0,18 0,000342 0,00035 0,000347
0,24 0,000342 0,000348 0,000348
0,3 0,000342 0,000347 0,00035
0,36 0,000342 0,000348 0,000348
0,42 0,00034 0,000348 0,00035
0,48 0,000342 0,00035 0,000348
0,54 0,00034 0,000344 0,000348
0,6 0,000342 0,000358 0,000347
Tabel. 15 Torsional Vibration Roda Gigi Normal 1100 rpm
Time Aksial Horizontal Vertikal
0,06 0,000311 0,000323 0,000322
0,12 0,000295 0,000302 0,000306
0,18 0,000316 0,000322 0,000322
0,24 0,00032 0,000322 0,000322
0,3 0,000318 0,000322 0,000323
0,36 0,000317 0,000321 0,000323
0,42 0,000321 0,000322 0,000323
0,48 0,000317 0,000322 0,000322
0,54 0,00031 0,000322 0,000323
0,6 0,000318 0,000322 0,000323
Tabel. 16 Torsional Vibration Roda Gigi Normal 1200 rpm
Time Aksial Horizontal Vertikal
0,06 0,000295 0,000301 0,000301
0,12 0,000276 0,000286 0,000287
0,18 0,000296 0,000305 0,000301
0,24 0,000296 0,000299 0,000301
0,3 0,000295 0,0003 0,000301
0,36 0,000295 0,000299 0,000302
0,42 0,000294 0,000294 0,000302
0,48 0,000295 0,000305 0,000301
0,54 0,000295 0,000302 0,000301
Tabel. 1 Velocity Roda Aus 500 Rpm
Time Aksial Horizontal Vertikal
0,06 0,485392 0,002345 0,002345
0,12 0,358937 0,002345 1,381965
0,18 0,002345 0,002345 0,002345
0,24 0,081455 0,002345 0,751487
0,3 0,213903 0,002345 0,621436
0,36 0,019725 0,002345 0,453629
0,42 0,256454 0,002345 0,255855
0,48 0,002345 0,002345 0,66159
0,54 1,306452 0,002345 0,699946
0,6 0,026917 0,620837 0,680768
Tabel. 2 Velocity Roda Aus 600 rpm
Time Aksial Horizontal Vertikal
0,06 0,19952 0,002345 1,694207
0,12 0,442242 0,002345 0,010736
0,18 0,203715 0,002345 0,05089
0,24 0,671179 0,002345 0,856966
0,3 0,411077 0,002345 0,526145
0,36 0,520752 0,002345 1,101486
0,42 0,768268 0,002345 0,575289
0,48 0,221095 0,008938 0,198321
0,54 0,79284 0,002345 0,333166
0,6 0,002345 0,002345 0,460221
Tabel. 3 Velocity Roda Aus 700 rpm
Time Aksial Horizontal Vertikal
0,06 0,4782 0,002345 0,002345
0,12 0,002345 0,002345 0,454827
0,18 1,19438 0,002345 0,490786
0,24 0,002345 0,002345 0,643611
0,3 2,182049 0,014332 0,604655
0,36 0,002345 0,002345 0,439844
0,42 0,846179 0,002345 0,610649
0,48 0,002345 0,002345 0,35594
0,54 0,002345 0,002345 0,418269
0,6 0,101232 0,002345 0,002345
0,06 0,079657 0,467413 0,002345
0,12 0,475803 0,471608 0,002345
0,18 0,43505 0,620837 0,002345
0,24 1,148832 0,472807 0,002345
0,3 0,182139 0,407481 0,002345
0,36 0,407481 0,477002 0,002345
0,42 0,629827 0,831795 0,002345
0,48 0,002345 0,002345 0,002345
0,54 1,260304 0,002345 0,002345
0,6 0,002345 0,002345 0,002345
Tabel. 5 Velocity Roda Aus 900 rpm
Time Aksial Horizontal Vertikal
0,06 0,246266 0,002345 0,002345
0,12 0,582481 0,611248 0,002345
0,18 0,959449 0,212704 0,229485
0,24 0,201917 0,710734 0,002345
0,3 0,279828 0,897121 0,002345
0,36 0,291215 0,571693 0,098835
0,42 0,727515 0,246266 0,35594
0,48 0,652001 0,26065 0,323577
0,54 0,002345 0,558508 0,800032
0,6 0,671779 0,179143 0,13779
Tabel. 6 Velocity Roda Aus 1000 rpm
Time Aksial Horizontal Vertikal
0,06 0,258852 0,002345 0,002345
0,12 0,258252 0,113218 0,002345
0,18 0,407481 0,020325 0,222293
0,24 0,656196 0,020325 0,511163
0,3 0,806624 0,002345 0,322379
0,36 0,131797 0,002345 0,370324
0,42 0,25166 0,131198 0,280427
0,48 0,002345 0,002345 0,222293
0,54 0,405683 0,052688 0,357738
0,6 0,282824 0,140787 0,288817
Tabel. 7 Velocity Roda Aus 1100 rpm
0,24 0,702344 0,002345 0,002345
0,3 0,587875 0,035308 0,97623
0,36 0,035308 0,002345 0,002345
0,42 0,428457 0,002345 0,002345
0,48 0,119811 0,010136 0,002345
0,54 0,213304 0,065273 0,002345
0,6 0,3038 0,002345 1,845235
Tabel. 8 Velocity Roda Aus 1200 rpm
Time Aksial Horizontal Vertikal
0,06 0,656796 0,002345 0,002345
0,12 0,089845 0,002345 0,002345
0,18 0,26904 0,002345 0,002345
0,24 0,118612 0,02452 0,002345
0,3 0,316985 0,221694 0,824604
0,36 0,071266 0,002345 0,002345
0,42 0,002345 0,002345 0,999603
0,48 0,00714 0,441043 0,002345
0,54 0,002345 0,592669 0,737104
0,6 0,002345 0,713731 0,892326
Tabel. 9 Torsional Vibration Roda Gigi Aus 500 rpm
Time Aksial Horizontal Vertikal
0,06 0,002019 9,75737e-06 1,72525e-06
0,12 0,001493 9,75737e-06 0,001016575
0,18 9,76e-06 9,75737e-06 1,72525e-06
0,24 0,000339 9,75737e-06 0,000552795
0,3 0,00089 9,75737e-06 0,000457129
0,36 8,21e-05 9,75737e-06 0,00033369
0,42 0,001067 9,75737e-06 0,000188207
0,48 9,76e-06 9,75737e-06 0,000486666
0,54 0,005435 9,75737e-06 0,000514881
Tabel. 10 Torsional Vibration Roda Gigi Aus 600 rpm
Time Aksial Horizontal Vertikal
0,06 0,000698 8,2038e-06 0,001048
0,12 0,001547 8,2038e-06 6,64e-06
0,18 0,000713 8,2038e-06 3,15e-05
0,24 0,002348 8,2038e-06 0,00053
0,3 0,001438 8,2038e-06 0,000325
0,48 0,000773 3,1263e-05 0,000123
0,54 0,002773 8,2038e-06 0,000206
Tabel. 11 Torsional Vibration Roda Gigi Aus 700 rpm
Time Aksial Horizontal Vertikal
0,06 0,001449 7,10606e-06 1,25646e-06
0,12 7,11e-06 7,10606e-06 0,00024366
0,18 0,003619 7,10606e-06 0,000262924
0,24 7,11e-06 7,10606e-06 0,000344796
0,3 0,006611 4,34224e-05 0,000323926
0,36 7,11e-06 7,10606e-06 0,000235634
0,42 0,002564 7,10606e-06 0,000327137
0,48 7,11e-06 7,10606e-06 0,000190685
0,54 7,11e-06 7,10606e-06 0,000224075
Tabel. 12 Torsional Vibration Roda Gigi Aus 800 rpm
Time Aksial Horizontal Vertikal
0,06 0,000214 0,001254 1,11281e-06
0,12 0,001277 0,001266 1,11281e-06
0,18 0,001167 0,001666 1,11281e-06
0,24 0,003083 0,001269 1,11281e-06
0,3 0,000489 0,001093 1,11281e-06
0,36 0,001093 0,00128 1,11281e-06
0,42 0,00169 0,002232 1,11281e-06
0,48 6,29e-06 6,29e-06 1,11281e-06
0,54 0,003382 6,29e-06 1,11281e-06
Tabel. 13 Torsional Vibration Roda Gigi Aus 900 rpm
Time Aksial Horizontal Vertikal
0,06 0,000596 5,67179e-06 1,00286e-06
0,12 0,001409 0,001478179 1,00286e-06
0,18 0,00232 0,000514382 9,81261e-05
0,24 0,000488 0,001718766 1,00286e-06
0,3 0,000677 0,002169503 1,00286e-06
0,36 0,000704 0,001382524 4,2261e-05
0,42 0,001759 0,000595544 0,000152197
0,48 0,001577 0,000630328 0,000138359
Time Aksial Horizontal Vertikal
0,06 0,000572 5,18385e-06 9,16585e-07
0,12 0,000571 0,000250241 9,16585e-07
0,18 0,000901 4,49229e-05 8,68738e-05
0,24 0,00145 4,49229e-05 0,000199766
0,3 0,001783 5,18385e-06 0,000125988
0,36 0,000291 5,18385e-06 0,000144725
0,42 0,000556 0,00028998 0,000109593
0,48 5,18e-06 5,18385e-06 8,68738e-05
0,54 0,000897 0,000116453 0,000139807
Tabel. 15 Torsional Vibration Roda Gigi Aus 1100 rpm
Time Aksial Horizontal Vertikal
0,06 4,79375e-06 0,000977 8,47609e-07
0,12 0,000522948 0,000854 8,47609e-07
0,18 4,79375e-06 0,000407 8,47609e-07
0,24 0,001435536 4,79e-06 8,47609e-07
0,3 0,00120157 7,22e-05 0,000352807
0,36 7,2166e-05 4,79e-06 8,47609e-07
0,42 0,000875733 4,79e-06 8,47609e-07
0,48 0,000244884 2,07e-05 8,47609e-07
0,54 0,000435976 0,000133 8,47609e-07
Tabel. 16 Torsional Vibration Roda Gigi Aus 1200 rpm
Time Aksial Horizontal Vertikal
0,06 0,001254 4,47752e-06 7,91695e-07
0,12 0,000172 4,47752e-06 7,91695e-07
0,18 0,000514 4,47752e-06 7,91695e-07
0,24 0,000226 4,68109e-05 7,91695e-07
0,3 0,000605 0,000423235 0,000278351
0,36 0,000136 4,47752e-06 7,91695e-07
0,42 4,48e-06 4,47752e-06 0,000337423
0,48 1,36e-05 0,000841992 7,91695e-07
Tabel. 1 Velocity Roda Sompel 500 rpm
Time Aksial Horizontal Vertikal
0,06 0,876145 0,200119 2,18085
0,12 0,002345 0,180941 0,002345
0,18 0,052688 0,19952 1,722975
0,24 0,070068 0,166557 0,002345
0,3 0,030513 0,599262 0,182739
0,36 0,095838 0,556111 0,017928
0,42 0,098236 0,285821 0,01553
0,48 0,299006 0,171951 1,14224
0,54 0,002345 0,970237 0,002345
0,6 0,002345 0,304399 0,310393
Tabel. 2 Velocity Roda Sompel 600 rpm
Time Aksial Horizontal Vertikal
0,06 0,305598 0,204314 0,177944
0,12 0,611847 0,168355 0,560306
0,18 0,333166 0,302002 0,330769
0,24 0,077859 0,186934 0,466214
0,3 0,324776 0,24267 0,593269
0,36 0,117414 0,342755 0,316386
0,42 0,222293 0,248663 0,31279
0,48 0,278629 0,243269 0,002345
0,54 0,385307 0,166557 0,165958
0,6 0,367927 0,150376 0,002345
Tabel. 3 Velocity Roda Sompel 700 rpm
Time Aksial Horizontal Vertikal
0,06 0,116215 0,894723 2,059789
0,12 0,662789 0,281626 0,002345
0,18 0,116814 0,442841 0,354142
0,24 0,821008 0,860562 0,002345
0,3 0,319982 0,303201 0,002345
0,36 0,002345 0,361334 0,129999
0,42 0,610049 0,524947 0,047893
0,48 0,459022 0,599262 0,255256
0,54 0,524947 0,28642 0,33017
0,06 0,327173 0,415272 0,002345
0,12 0,283423 0,305598 0,002345
0,18 0,64481 0,221095 0,004143
0,24 0,424861 0,524947 0,002345
0,3 0,543526 0,333766 0,995408
0,36 0,344553 0,425461 0,002345
0,42 0,360735 0,640015 0,232482
0,48 0,19952 0,571693 0,002345
0,54 0,148578 0,46082 1,212959
0,6 0,33916 0,336163 0,002345
Tabel. 5 Velocity Roda Sompel 900 rpm
Time Aksial Horizontal Vertikal
0,06 0,393098 0,505769 0,639416
0,12 0,351745 0,415872 0,096438
0,18 0,126403 0,519553 0,138989
0,24 0,281026 0,402088 0,319982
0,3 0,153972 0,323577 0,282824
0,36 0,262447 0,312191 0,512961
0,42 0,09404 0,490786 0,194126
0,48 0,040102 0,559707 0,002345
0,54 0,43445 0,237276 0,117414
0,6 0,436248 0,465615 0,002345
Tabel. 6 Velocity Roda Sompel 1000 rpm
Time Aksial Horizontal Vertikal
0,06 0,598662 0,397892 0,391899
0,12 0,333166 0,411077 0,980425
0,18 0,34755 0,293012 0,660991
0,24 0,194126 0,723919 0,536334
0,3 0,364331 0,387105 0,436248
0,36 0,61784 0,698148 0,372122
0,42 0,288817 0,665186 0,460221
0,48 0,29541 0,257653 0,002345
0,54 0,124605 0,773662 0,46082
0,6 0,457824 0,341557 0,002345
Tabel. 7 Velocity Roda Sompel 1100 rpm
Time Aksial Horizontal Vertikal
0,06 0,358338 0,551317 0,002345
0,24 0,361934 0,454228 0,002345
0,3 0,424861 0,559108 0,002345
0,36 0,439245 0,263646 0,474604
0,42 0,400889 0,516556 0,002345
0,48 0,689758 0,584279 0,596265
0,54 0,482396 0,606453 0,002345
0,6 0,488988 0,577087 0,002345
Tabel. 8 Velocity Roda Sompel 1200 rpm
Time Aksial Horizontal Vertikal
0,06 0,514159 0,214502 1,582735
0,12 0,359536 0,612447 0,002345
0,18 0,553714 0,659792 0,002345
0,24 0,404485 0,318184 0,002345
0,3 0,636419 0,290016 0,002345
0,36 0,674775 0,547121 0,002345
0,42 0,584279 0,410478 0,002345
0,48 0,535734 0,438046 0,002345
0,54 0,402687 0,375118 0,002345
0,6 0,350547 0,710135 0,002345
Tabel. 9 Torsional Vibration Roda gigi Sompel 500 rpm
Time Aksial Horizontal Vertikal
0,06 0,003645 0,000833 0,009073
0,12 9,76e-06 0,000753 9,76e-06
0,18 0,000219 0,00083 0,007168
0,24 0,000292 0,000693 9,76e-06
0,3 0,000127 0,002493 0,00076
0,36 0,000399 0,002314 7,46e-05
0,42 0,000409 0,001189 6,46e-05
0,48 0,001244 0,000715 0,004752
0,54 9,76e-06 0,004036 9,76e-06
0,6 9,76e-06 0,001266 0,001291
Tabel.10 Torsional Vibration Roda gigi Sompel 600 rpm
Time Aksial Horizontal Vertikal
0,06 0,001069 0,000715 0,000622
0,12 0,00214 0,000589 0,00196
0,42 0,000778 0,00087 0,001094
0,48 0,000975 0,000851 8,2e-06
0,54 0,001348 0,000583 0,000581
0,6 0,001287 0,000526 8,2e-06
Tabel. 11 Torsional Vibration Roda gigi Sompel 700 rpm
Time Aksial Horizontal Vertikal
0,06 0,000352 0,002711 0,006241
0,12 0,002008 0,000853 7,11e-06
0,18 0,000354 0,001342 0,001073
0,24 0,002488 0,002607 7,11e-06
0,3 0,000969 0,000919 7,11e-06
0,36 7,11e-06 0,001095 0,000394
0,42 0,001848 0,00159 0,000145
0,48 0,001391 0,001816 0,000773
0,54 0,00159 0,000868 0,001
0,6 0,001814 0,001229 0,002842
Tabel. 12 Torsional Vibration Roda gigi Sompel 800 rpm
Time Aksial Horizontal Vertikal
0,06 0,000878 0,001114 6,29362e-06
0,12 0,000761 0,00082 6,29362e-06
0,18 0,00173 0,000593 1,11183e-05
0,24 0,00114 0,001409 6,29362e-06
0,3 0,001459 0,000896 0,002671102
0,36 0,000925 0,001142 6,29362e-06
0,42 0,000968 0,001717 0,000623847
0,48 0,000535 0,001534 6,29362e-06
0,54 0,000399 0,001237 0,003254884
0,6 0,00091 0,000902 6,29362e-06
Tabel. 13 Torsional Vibration Roda gigi Sompel 900 rpm
Time Aksial Horizontal Vertikal
0,06 0,000951 0,001223 0,001546
0,12 0,000851 0,001006 0,000233
0,18 0,000306 0,001256 0,000336
0,24 0,00068 0,000972 0,000774
0,3 0,000372 0,000783 0,000684
0,36 0,000635 0,000755 0,00124
0,42 0,000227 0,001187 0,000469
0,6 0,001055 0,001126 5,67e-06
Tabel.14 Torsional Vibration Roda gigi Sompel 1000 rpm
Time Aksial Horizontal Vertikal
0,06 0,001323 0,000879 0,000866
0,12 0,000736 0,000909 0,002167
0,18 0,000768 0,000648 0,001461
0,24 0,000429 0,0016 0,001185
0,3 0,000805 0,000856 0,000964
0,36 0,001366 0,001543 0,000822
0,42 0,000638 0,00147 0,001017
0,48 0,000653 0,000569 5,18e-06
0,54 0,000275 0,00171 0,001019
0,6 0,001012 0,000755 5,18e-06
Tabel. 15 Torsional Vibration Roda gigi Sompel 1100 rpm
Time Aksial Horizontal Vertikal
0,06 0,000732 0,001127 4,79375e-06
0,12 0,001477 0,000343 4,79375e-06
0,18 0,000931 0,00048 4,79375e-06
0,24 0,00074 0,000928 4,79375e-06
0,3 0,000868 0,001143 4,79375e-06
0,36 0,000898 0,000539 0,000970054
0,42 0,000819 0,001056 4,79375e-06
0,48 0,00141 0,001194 0,001218719
0,54 0,000986 0,00124 4,79375e-06
0,6 0,000999 0,00118 4,79375e-06
Tabel. 16 Torsional Vibration Roda gigi Sompel 1200 rpm
Time Aksial Horizontal Vertikal
0,06 0,000982 0,00041 0,003022
0,12 0,000686 0,001169 4,48e-06
0,18 0,001057 0,00126 4,48e-06
0,24 0,000772 0,000607 4,48e-06
0,3 0,001215 0,000554 4,48e-06
0,36 0,001288 0,001045 4,48e-06
0,42 0,001115 0,000784 4,48e-06
0,48 0,001023 0,000836 4,48e-06
Tabel. 1 Velocity Roda Gigi Patah 500 rpm
Time Aksial Horizontal Vertikal
0,06 2,054994 0,002345 0,002345
0,12 1,84044 0,002345 0,002345
0,18 2,047802 0,002345 0,002345
0,24 0,349348 0,002945 0,002345
0,3 0,135992 0,010736 0,002345
0,36 0,002345 0,002945 0,002345
0,42 0,383509 0,002345 0,002345
0,48 0,048493 0,002345 0,002345
0,54 0,020924 0,002345 0,002345
0,6 0,010736 0,002345 0,002345
Tabel. 2 Velocity Roda Gigi Patah 600 rpm
Time Aksial Horizontal Vertikal
0,06 1,9627 0,002345 0,878542
0,12 1,823659 0,002345 0,002345
0,18 1,963899 0,002345 0,002345
0,24 1,983077 0,002345 0,002345
0,3 1,965696 0,002345 0,002345
0,36 1,908762 0,002345 0,002345
0,42 1,956107 0,002345 0,002345
0,48 1,960902 0,002345 0,002345
0,54 1,956107 0,002345 0,002345
0,6 1,950714 0,002345 0,002345
Tabel. 3 Velocity Roda Gigi Patah 700 rpm
Time Aksial Horizontal Vertikal
0,06 2,378623 0,002345 0,002345
0,12 2,310302 0,706539 0,002345
0,18 2,402596 0,873747 0,250461
0,24 0,427858 0,444039 0,002345
0,3 0,086249 0,53993 0,435649
0,36 0,02452 0,345153 0,002345
0,42 0,186934 0,797035 0,002345
0,48 0,294211 0,431454 0,002345
0,54 0,068869 0,354142 0,002345
Tabel. 4 Velocity Roda Gigi Patah 800 rpm
Time Aksial Horizontal Vertikal
0,06 2,401397 0,002345 0,002345
0,12 2,396003 0,026917 0,010136
0,18 2,39001 0,002345 0,002345
0,24 2,385216 0,002345 0,002345
0,3 2,383418 0,010736 0,002345
0,36 2,380421 0,002345 0,222893
0,42 2,379822 0,025719 0,002345
0,48 2,3996 0,002345 0,002345
0,54 2,403195 0,02452 0,002345
0,6 2,396603 0,002345 0,002345
Tabel. 5 Velocity Roda Gigi Patah 900 rpm
Time Aksial Horizontal Vertikal
0,06 2,343863 0,415872 0,677172
0,12 2,345062 0,40029 0,177944
0,18 2,330678 0,453029 0,162362
0,24 2,330079 0,165359 0,815614
0,3 2,289925 1,031367 1,141041
0,36 2,323487 0,549519 0,659193
0,42 2,319291 0,022722 0,73171
0,48 2,316295 0,002345 0,857566
0,54 2,310302 0,05029 0,002345
0,6 2,318692 0,002345 0,002345
Tabel. 6 Velocity Roda Gigi Patah 1000 rpm
Time Aksial Horizontal Vertikal
0,06 2,174857 0,020924 0,002345
0,12 2,168864 0,654399 0,584279
0,18 2,166466 0,40029 0,233081
0,24 2,165268 0,655597 1,488643
0,3 2,160473 0,247465 0,002345
0,36 1,277085 0,742498 1,487444
0,42 0,116814 0,643012 0,002345
0,48 0,060479 0,474005 0,696351
0,54 0,131797 0,327773 0,002345
Tabel. 7 Velocity Roda Gigi Patah 1100 rpm
Time Aksial Horizontal Vertikal
0,06 2,283932 0,002345 0,002345
0,12 0,022722 0,002345 0,002345
0,18 0,330769 0,002345 0,002345
0,24 0,598063 0,002345 0,002345
0,3 0,351745 0,002345 0,002345
0,36 0,002345 0,002345 0,002345
0,42 0,186335 0,05089 0,002345
0,48 0,245067 0,002345 0,002345
0,54 0,175547 0,108424 0,002345
0,6 2,363041 0,006541 0,002345
Tabel. 8 Velocity Roda Gigi Patah 1200 rpm
Time Aksial Horizontal Vertikal
0,06 2,319891 2,010645 0,462618
0,12 2,322887 0,002345 0,26904
0,18 2,331278 0,02452 0,640614
0,24 2,343863 0,002345 0,407481
0,3 2,343863 0,540529 0,204913
0,36 2,339069 0,004143 0,002345
0,42 2,328281 0,002345 0,002345
0,48 2,324685 0,061677 0,002345
0,54 2,321689 0,126403 0,002345
0,6 2,318093 0,0419 0,002345
Tabel. 9 Torsional Vibration Roda Gigi Patah 500 rpm
Time Aksial Horizontal Vertikal
0,06 0,008549 3,57958e-06 2,89189e-06
0,12 0,007657 3,57958e-06 2,89189e-06
0,18 0,008519 3,57958e-06 2,89189e-06
0,24 0,001453 3,57958e-06 2,89189e-06
0,3 0,000566 0,00053776 2,89189e-06
0,36 9,76e-06 0,000829547 2,89189e-06
0,42 0,001596 0,000410618 2,89189e-06
0,48 0,000202 0,000832291 2,89189e-06
0,54 8,7e-05 0,000461841 2,89189e-06
Tabel. 10 Torsional Vibration Roda Gigi Patah 600 rpm
Time Aksial Horizontal Vertikal
0,06 0,006865 2,43883e-06 0,000914
0,12 0,006379 2,43883e-06 2,44e-06
0,18 0,006869 2,43883e-06 2,44e-06
0,24 0,006937 2,43883e-06 2,44e-06
0,3 0,006876 2,43883e-06 2,44e-06
0,36 0,006677 2,43883e-06 2,44e-06
0,42 0,006842 2,43883e-06 2,44e-06
0,48 0,006859 2,43883e-06 2,44e-06
0,54 0,006842 2,43883e-06 2,44e-06
0,6 0,006823 2,43883e-06 2,44e-06
Tabel. 11 Torsional Vibration Roda Gigi Patah 700 rpm
Time Aksial Horizontal Vertikal
0,06 0,007207 2,12001e-06 2,12001e-06
0,12 0,007 0,000638651 2,12001e-06
0,18 0,007279 0,000789793 0,000226396
0,24 0,001296 0,000401374 2,12001e-06
0,3 0,000261 0,00048805 0,00039379
0,36 7,43e-05 0,000311989 2,12001e-06
0,42 0,000566 0,000720452 2,12001e-06
0,48 0,000891 0,000389998 2,12001e-06
0,54 0,000209 0,000320115 2,12001e-06
0,6 0,001011 0,000251315 2,12001e-06
Tabel. 12 Torsional Vibration Roda Gigi Patah 800 rpm
Time Aksial Horizontal Vertikal
0,06 0,006444 1,88527e-06 1,88527e-06
0,12 0,006429 2,16368e-05 8,14793e-06
0,18 0,006413 1,88527e-06 1,88527e-06
0,24 0,006401 1,88527e-06 1,88527e-06
0,3 0,006396 8,62968e-06 1,88527e-06
0,36 0,006388 1,88527e-06 0,000179167
0,42 0,006386 2,06733e-05 1,88527e-06
0,48 0,006439 1,88527e-06 1,88527e-06
0,54 0,006449 1,97098e-05 1,88527e-06
Tabel. 13 Torsional Vibration Roda Gigi Patah 900 rpm
Time Aksial Horizontal Vertikal
0,06 0,005668 0,000303 0,000493
0,12 0,005671 0,000291 0,000129
0,18 0,005636 0,00033 0,000118
0,24 0,005635 0,00012 0,000594
0,3 0,005538 0,000751 0,00083
0,36 0,005619 0,0004 0,00048
0,42 0,005609 1,65e-05 0,000532
0,48 0,005601 1,71e-06 0,000624
0,54 0,005587 3,66e-05 1,71e-06
0,6 0,005607 1,71e-06 1,71e-06
Tabel. 14 Torsional Vibration Roda Gigi Patah 1000 rpm
Time Aksial Horizontal Vertikal
0,06 0,004807 1,3987e-05 1,5678e-06
0,12 0,004794 0,00043744 0,00039057
0,18 0,004788 0,00026758 0,00015581
0,24 0,004786 0,00043824 0,00099511
0,3 0,004775 0,00016542 1,5678e-06
0,36 0,002823 0,00049633 0,0009943
0,42 0,000258 0,00042983 1,5678e-06
0,48 0,000134 0,00031686 0,00046549
0,54 0,000291 0,0002191 1,5678e-06
0,6 1,71e-05 0,00031485 1,5678e-06
Tabel. 15 Torsional Vibration Roda Gigi Patah 1100 rpm
Time Aksial Horizontal Vertikal
0,06 0,004668 1,45781e-06 1,45781e-06
0,12 4,64e-05 1,45781e-06 1,45781e-06
0,18 0,000676 1,45781e-06 1,45781e-06
0,24 0,001222 1,45781e-06 1,45781e-06
0,3 0,000719 1,45781e-06 1,45781e-06
0,36 4,79e-06 1,45781e-06 1,45781e-06
0,42 0,000381 3,16316e-05 1,45781e-06
0,48 0,000501 1,45781e-06 1,45781e-06
0,54 0,000359 6,73932e-05 1,45781e-06
Tabel. 16 Torsional Vibration Roda Gigi Patah 1200 rpm
Time Aksial Horizontal Vertikal
0,06 0,004429 0,001174 0,00027
0,12 0,004435 1,37e-06 0,000157
0,18 0,004451 1,43e-05 0,000374
0,24 0,004475 1,37e-06 0,000238
0,3 0,004475 0,000316 0,00012
0,36 0,004465 2,42e-06 1,37e-06
0,42 0,004445 1,37e-06 1,37e-06
0,48 0,004438 3,6e-05 1,37e-06
0,54 0,004432 7,38e-05 1,37e-06
DAFTAR PUSTAKA
Adams, Maurice L, “Rotating Machinery Vibration”, Case Western Reserve Univercity, New York, 2000.
Harris, Cyril M & Allan G. Piersol (editor), “Shock & Vibration Handbook”. Fifth Edition, Mc. Graw-Hill Companies, New York, 2002.
Hutahaean Y. Ramses, “ Getaran Mekanik”dilengkapi pemrogaman dan simulasi
dengan MATLAB, Andi Yogyakarta, 2011.
Meirovitch, Leonard, “Fundamental of Vibration”, Mc.Gram-Hill International Edition, Singapore, 2001.
Michael, Robichaud J. P. Eng. ”Reference Standards for Vibration Monitoring
and Analysis”
Mobley, R. K; Lindley R. Higgins dan Darrin J. Wikoff. “Maintenance Engineering Handbook”., Seventh Edition, NewYork, McGraw-Hill Book Company. 2008
Monavar H, M, H. Ahmadi dan S.S. Mohtasebi, “Prediction of Defects inRoller Bearings Using Vibration Signal Analysis”. World Applied Sciences Journal. 2008.
Moon J. dan J.A. Wicker, “Non Linear Vibration of Power TransmissionBelts”,
Journal of Sound and Vibration. 1997.
Vierck, Robert K, “Analisis Getaran”, PT. Eresco, Bandung, 1995.
Spotts M. F, “Design Of Machine Elements” Fifth Edition, Mechanical
Engineering Departement The Technological Institute Northwestern niversity
Timothy R. Griffin “Computer-Aided Design Software for Torsional Analysis”
Mechanical Engineering Faculty of the Virginia Polytechnic Institute and State University. Blacksburg, Virginia. March 5, 1998.
Vierck. K Robert “Analisis Getaran” PT Eresco. Bandung. 1995.
William T. Thomson. “Teori Getaran Dengan Penerapannya” Edisi Kedua. Erlangga. 1992
http://desnantara.blogspot.com/2013/04/frekuensi-perioda-amplitudo-panjang.html
http://id.wikipedia.org/wiki/Panjang_gelombang http://id.wikipedia.org/wiki/Amplitudo
http://karyailmiah.tarumanagara.ac.id/index.php/S1TM/article/view/949
http://digilib.itb.ac.id/gdl.php?mod=browse&op=read&id=jbptitbpp-gdl-muhammadyu-30817
http://digilib.its.ac.id/ITS-Undergraduate-3100004020795/11376
http://digilib.its.ac.id/analisa-sinyal-getaran-pada-roda-gigi-untuk-mendeteksi-kerusakan-berupa-patah-gigi-11376.html
BAB III
METODE PENELITIAN
3.1. Tempat Penelitian
Penelitian ini dilaksanakan sejak tanggal 22 Mei 2014 pengesahan usulan oleh pengelola program studi sampai dinyatakan selesai yang direncanakan berlangsung selama ± 4 bulan. Tempat pelaksanaan penelitian adalah di Research Center Noise/Vibration Control and Knowledge Based in Engineering, Program Magister Teknik
Mesin, Fakultas Teknik, Universitas Sumatera Utara.
3.2. Bahan dan Alat
3.2.1. Bahan
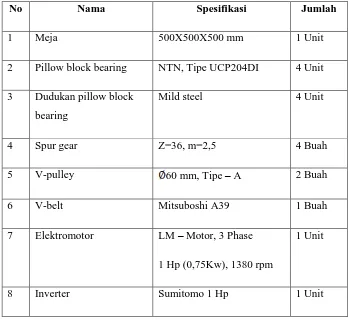
[image:32.595.168.516.435.755.2]Bahan yang digunakan dalam melakukan penelitian ini adalah sebagai berikut yang terdapat pada table 3.1.
Tabel 3.1. Bahan yang digunakan penelitian
No Nama Spesifikasi Jumlah
1 Meja 500X500X500 mm 1 Unit
2 Pillow block bearing NTN, Tipe UCP204DI 4 Unit
3 Dudukan pillow block bearing
Mild steel 4 Unit
4 Spur gear Z=36, m=2,5 4 Buah
5 V-pulley 60 mm, Tipe – A 2 Buah
6 V-belt Mitsuboshi A39 1 Buah
7 Elektromotor LM – Motor, 3 Phase
1 Hp (0,75Kw), 1380 rpm
9 Poros 20X300 mm 1 Unit
10 Poros 20X500 mm 1 Unit
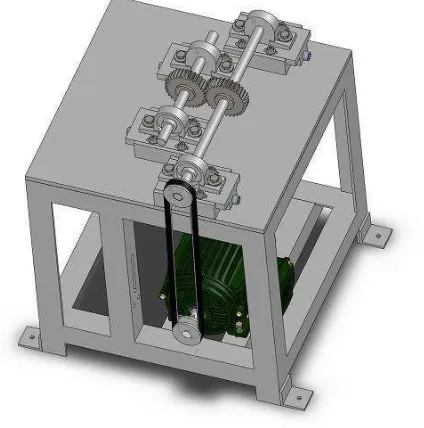
[image:33.595.222.434.221.435.2]Adapun kontruksi penelitian yang digunakan dapat dilihat pada gambar 3.1.
Gambar 3.1 Konstruksi penelitian
Roda gigi yang digunakan yaitu roda gigi normal (gambar 3.2), roda gigi aus (gambar 3.3.) dengan tingkat keausan ±25% dari kondisi normalnya, roda gigi sompel (gambar 3.4.), dan roda gigi patah (gambar 3.5) dengan kondisi patahnya 3mm pada salah satu propil roda giginya.
Gambar 3.4 Roda gigi pecah Gambar 3.5 Roda gigi patah
3.2.2. Alat yang digunakan
Alat yang digunakan dalam penelitian ini sebanyak 12 alat yaitu sebagai berikut:
1. Vibrometer laser ometron VQ-400-A-F
[image:34.595.318.480.86.211.2]Vibrometer adalah alat yang digunakan untuk mengukur kecepatan getaran.
Gambar 3.6 Vibrometer laser ometron VQ-400-A-F
2. Labjack U3-LV
[image:34.595.147.311.93.210.2]3. Probe Analog dan USB cable
Probe X2 adalah probe analog yang digunakan sebagai
[image:35.595.271.388.232.320.2]penghubung dari vibrometer ke labjack. Probe ini terdiri dari 2 jalur, yang 1 untuk penghubung ke labjack dan yang satu lagi ke power supplay.
Gambar 3.8 Probe Analog dan USB cable
4. Tachometer
Tachometer digunakan untuk mengukur kecepatan putaran
motor.
Gambar 3.9 Tachometer
5. Kabel USB
[image:35.595.285.380.433.545.2]Gambar 3.10 Kabel USB 6. Power Supplay
Power Supplay digunakan untuk mengatur arus searah yang
[image:36.595.280.388.167.257.2]dihubungkan ke vibrometer dengan daya 12V/1A.
Gambar 3.11 Power Supplay
7. Tripod
Tripod adalah alat untuk membantu agar badan vibrometer laser
ometron VQ-400-A-F bisa berdiri dengan tegak, tegar dan diam, dan
[image:36.595.315.394.408.528.2]juga bisa di atur ketinggiannya.
Gambar 3.12 Tripod
8. Voltmeter
Voltmeter digunakan untuk mengukur besarnya tegangan listrik
Gaambar 3.13 Voltmeter
9. Vernier calliper
Vernier calliper digunakan untuk mengukur jarak antar poros
[image:37.595.270.396.337.450.2]serta dimensi.
Gambar 3.14 Vernier calliper
10. Kunci pas
[image:37.595.286.411.562.695.2]Kunci past digunakan untuk mengunci baut pada saat pemasangan benda kerja.
11. Kunci L
Kunci L digunakan untuk mengunci baut pada saat pemasangan benda kerja.
Gambar 3.16 Kunci L
12. Meteran
[image:38.595.269.401.405.497.2]Meteran yaitu digunakan untuk mengukur jarak vibrometer laser kealat yang yang akan kita uji.
Gambar 3.17 Meteran
3.3.Metode Penelitian
Metode pengujian rencananya dilakukan yaitu pengujian langsung, dimana pada pengujian ini, seluruh variabel nilainya didapat dari hasil pengukuran dan digunakan bahan pengamatan atau analisis. Pada pengujian ini variabel yang digunakan terdiri dari sinyal getaran dan fenomena getaran.
3.4.Set Up Peralatan
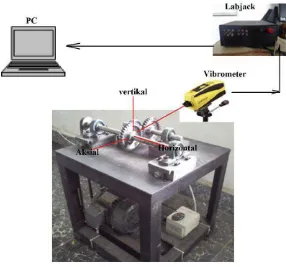
[image:39.595.170.456.227.494.2]Secara eksperimental pengujian dan pengambilan data dilakukan untuk memperoleh karakteristik getaran yang ditransmisikan dari motor keroda gigi. Keluaran vibrometer menghasilkan sinyal listrik analog yang akan dirubah menjadi sinyal listrik digital oleh ADC Labjak untuk diteruskan ke PC laptop.
Gambar 3.18 Rangkaian analisa pengukuran data getaran
Set up peralatan pengujian dilakukan untuk memperoleh data eksperimental sebagai
berikut:
1. Hubungkan Vibrometer dengan power supplay dan labjack.
2. Hubungkan Labjack dengan Vibrometer dengan menggunakan probe analog. 3. Hubungkan labjack ke PC dengan mengunakan USB cable.
4. Pasang dan operasikan vibrometer dengan tegangan 12 Volt/1A yang arusnya diatur melaui power supplay.
5. Kondisikan jarak antara vibrometer dengan roda gigi dengan jarak 376 mm. 6. Arahkan vibrometer laser kearah roda gigi kemudian arahkan lasernya pada
8. Pada arah Horizontal lakukan pengambilan data dengan kecepatan putaran yaitu 400rpm, 500rpm, 600rpm, 700rpm, 800rpm, 900rpm, 1000rpm, 1100rpm dan 1200rpm dengan menggunakan inverter. Lakukan hal yang sama pada arah Vertikal dan Aksial.
3.4 Pengolahan dan Analisa Data
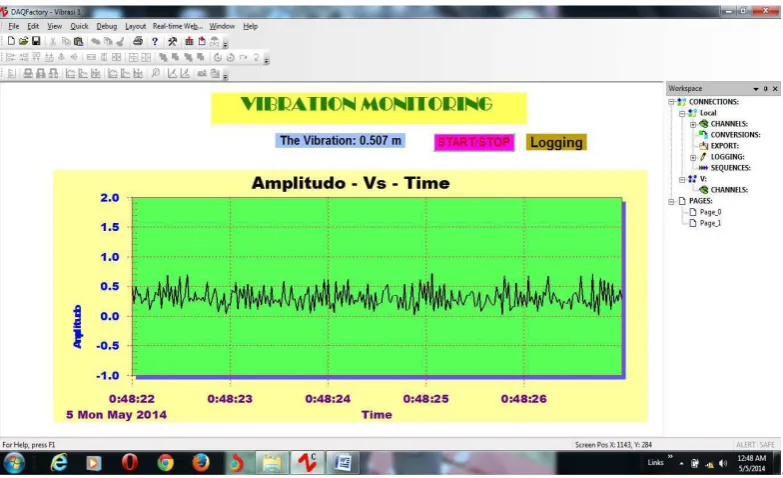
Pengolahan data getaran akan dilakukan dalam 2 tahap. Tahap dilakukan oleh alat instrumen, sedangkan tahap kedua adalah untuk kebutuhan pelaporan yang nantinya digunakan sebagai bahanan alias terhadap getaran. Data yang diperoleh berupa sinyal dinamis (gambar 3.19) selanjutnya ditransfer ke PC untuk diolah dan ditampilkan dalam bentuk table dan grafik. Hasil pengolahan data berupa laporan yang akan dianalisa menggunakan metode statistic untuk mengetahui besarnya getaran yang terjadi pada roda gigi.
[image:40.595.116.508.358.597.2]. Gambar 3.19 Pengukuran time domain
Sesuai dengan maksud penelitian, variable ini menjadi focus perhatian yang perlu dikondisikan untuk pengolahan data guna mendapatkan suatu hasil yang mendekati sempurna.
Adapun variabel yang diamati dalam penelitian ini adalah :
1. Pada saat pemasangan roda gigi, poros harus sejajar dan di ukur dengan jarak yang sama antara poros penggerak dengan poros yang digerakkan menggunakan vernier calliper.
2. Jarak Vibrometer laser ometron VQ-400-A-F ke roda gigi. 3. Putaran motor yang di ubah dengan inverter.
4. Getaran pada roda gigi normal, roda gigi aus, rodah gigi sompel, dan roda gigi patah dengan arah horizontal, vertikal dan aksial.
3.5.Pelaksanaan Penelitian
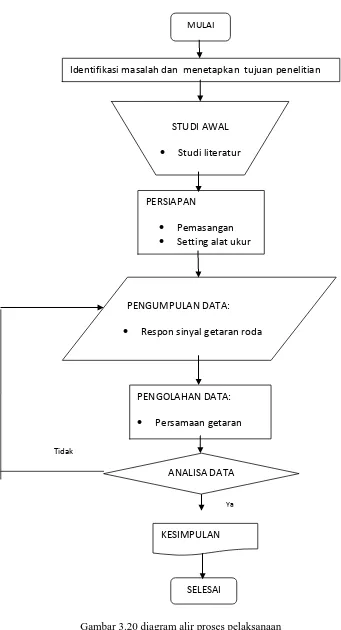
Gambar 3.20 diagram alir proses pelaksanaan
MULAI
PERSIAPAN
Pemasangan Setting alat ukur
Identifikasi masalah dan menetapkan tujuan penelitian
PENGUMPULAN DATA:
Respon sinyal getaran roda gigi
STUDI AWAL
Studi literatur
PENGOLAHAN DATA:
Persamaan getaran
ANALISA DATA
KESIMPULAN
SELESAI Ya
BAB IV
ANALISA DAN PEMBAHASAN
4.1. Perhitungan Getaran Roda Gigi Lurus
Roda gigi yang digunakan pada penelitian ini adalah roda gigi lurus dengan spesifikasi sebagai berikut:
Jenis roda gigi : Roda gigi lurus
Jumlah gigi : 36 gigi
Modul : 2.5
4.2 Karakteristik Getaran Pada Roda Gigi Lurus Dengan Variasi Putaran
Pengukuran getaran pada roda gigi lurus dengan kondisi roda gigi normal, roda gigi aus, roda gigi sompel, dan roda gigi patah dilakukan dengan memvariasikan kecepatan yaitu: 400 Rpm, 500 Rpm, 600 Rpm, 700 Rpm, 800 Rpm, 900 Rpm, 1000 Rpm, 1100 Rpm dan 1200 Rpm.
Rumus dasar getaran menggunakan rumus sebagai berikut:
a. Simpangan: t A
x .sin , maka
t x A sin b. Kecepatan: t A
x .cos , maka
t x A cos c. Percepatan: t A x2 sin
, maka
t x A
2sin
4.2.1 Karakteristik Getaran Pada Roda Gigi Normal
Tabel 4. 1. Hasil pengukuran velocity roda gigi normal pada putaran 400 Rpm
Velocity Roda gigi Normal (mm/s)
Time (s) Aksial Horizontal Vertikal
0,06 0.152773 0.15577 0.156968
0.12 0.143783 0.14678 0.149177
0.18 0.153972 0.156968 0.156968
0.24 0.153372 0.156968 0.156369
0.30 0.153372 0.156369 0.156968
0.36 0.153372 0.156968 0.156369
0.42 0.153372 0.156369 0.156369
0.48 0.153372 0.156369 0.156968
0.54 0.151574 0.156369 0.156369
0.60 0.156968 0.156968 0.156968
Gambar 4. 1. Velocity roda gigi normal pada putaran 400 Rpm
Jika dikaitkan dengan standart indicator uji kelayakan mesin ISO 2372 (BS4675) kelas I data getaran yang dihasilkan oleh velocity roda gigi normal memiliki amplitudo sebesar 0.159366 mm/s yang berati roda gigi normal ini berada pada zona A (hijau), yang memilik vibrasi sangat baik dan dibawah vibrasi yang diizinkan.
Berdasarkan dari data hasil percobaan di atas, data yang dihasilkan adalah berupa hasil kecepatan. Sehingga berdasarkan data vibrasi yang didapatkan maka digambarkan karakteristik vibrasi dengan langkah sebagai berikut:
Kecepatan sudut pada kecepatan putaran poros: 400 Rpm, maka:
s rad x400 41,86 / 60
2
Frekuensi motor dapat dihitung: f
2 ,sehingga
2 f Maka: 0.142 0.144 0.146 0.148 0.15 0.152 0.154 0.156 0.158 0.16 0.162
0 10 20 30 40 50 60 70
Hz
f 6,67
2 86 , 41
2
Sehingga Perioda motor dapat dihitung adalah sebagai berikut:
Amplitodo dapat dapat dihitung melalui persamaan velocity yang di dapat dari hasil transduser, dengan demikian persamaan amplitudo dapat dihitung sebagai berikut:
t A x .cos
t x A cos s mm
A 0,00451 /
06 . 0 ). 86 , 41 cos( 86 , 41 0.152773
Untuk menghitung acceleration dapat dicari dengan mendifferensialkan persamaan velocity sebagai berikut:
dt x d x
dt t A d
x ( .cos )
t A x2 sin 06 , 0 ). 86 , 41 sin( 0,00451 . ) 86 , 41 ( 2 x x
4,649396 mm/s2
Dari hasil perhitungan acceleration yang didapat dari mendifferensialkan persamaan velocity dapat dilihat pada tabel 4.2 sebagai berikut:
s f
T 0,149
Table 4.2. Hasil pengukuran acceleration roda gigi normal pada putaran 400 Rpm
Dari tabel diatas dapat di gambarkan grafik acceleration vs time seperti gamabar 4.2. sebagai berikut:
Acceleration Roda Gigi Normal (mm/s)
Time (s) Aksial Horizontal Vertikal
0,06 4.649396 4.74059 4.77707
0.12 4.375809 4.467003 4.539961
0.18 4.685873 4.77707 4.77707
0.24 4.667635 4.77707 4.758828
0.30 4.667635 4.758828 4.77707
0.36 4.667635 4.77707 4.758828
0.42 4.667635 4.758828 4.758828
0.48 4.667635 4.758828 4.77707
0.54 4.612916 4.758828 4.758828
Gambar 4.2. Acceleration roda gigi normal pada putaran 400 Rpm
Dapat dilihat dari gambar grafik acceleration roda gigi normal bahwa untuk amplitudo yang dihasilkan memiliki amplitudo terbesar pada arah horizontal.
Untuk menghitung displacement dapat dicari dengan mengintegralkan persamaan velocity sebagai berikut:
x(t)
x
t A x .sin..
mm 0,00265 06 , 0 ). 86 , 41 sin( . 0,00451 x x
Dari hasil perhitungan displacement yang mengintegralkan persamaan velocity dapat dilihat pada tabel 4.3 sebagai berikut:
4.3 4.4 4.5 4.6 4.7 4.8 4.9
0 10 20 30 40 50 60 70
Table 4.3. Hasil perhitungan displacement roda gigi normal pada putaran 400 Rpm
Displacement Roda Gigi Normal (mm)
Time (s) Aksial Horizontal Vertikal
0,06 0.00265 0.002702 0.002723
0.12 0.002494 0.002546 0.002587
0.18 0.002671 0.002723 0.002723
0.24 0.00266 0.002723 0.002712
0.30 0.00266 0.002712 0.002723
0.36 0.00266 0.002723 0.002712
0.42 0.00266 0.002712 0.002712
0.48 0.00266 0.002712 0.002723
0.54 0.002629 0.002712 0.002712
0.60 0.002723 0.002723 0.002723
Gambar 4. 3. Displacement roda gigi normal pada putaran 400 Rpm
Dapat dilihat dari gambar grafik displacement roda gigi normal bahwa untuk amplitudo yang dihasilkan memiliki amplitudo terbesar pada arah horizontal.
4.2.2 Karakteristik Getaran Pada Roda Gigi Aus
Hasil pengukuran getaran pada roda gigi aus dapat di lihat pada tabel 4.4 berikut ini:
Table 4.4. Hasil pengukuran Velocity roda gigi aus pada putaran 400 Rpm
Velocity Roda Gigi Aus (mm/s)
Time (s) Aksial Horizontal Vertikal
0,06 0.708337 0.002345 0.031712
0.12 0.629827 0.002345 0.030513
0.18 0.339759 0.002345 0.002345
0.24 0.868953 0.002345 0.002345
0.30 0.002345 0.002345 2.159874
0.00245 0.0025 0.00255 0.0026 0.00265 0.0027 0.00275 0.0028
0 10 20 30 40 50 60 70
D
is
p
la
ce
m
e
n
t
(m
m
)
Time (s)
AKSIAL
HORIZONTAL
[image:50.595.113.378.534.739.2]0.42 1.085305 0.414673 0.782652
0.48 0.002345 0.330769 0.474604
0.54 2.280935 0.113218 0.002345
0.60 0.002345 0.684964 0.752087
[image:51.595.115.546.305.508.2]Dari tabel diatas dapat di gambarkan grafik velocity vs time seperti gambar 4.4. sebagai berikut:
Gambar 4. 4. velocity roda gigi aus pada putaran 400 Rpm
Jika dikaitkan dengan standart indicator uji kelayakan mesin ISO 2372 (BS4675) kelas I, data getaran yang dihasilkan pada velocity roda gigi aus memiliki amplitudo sebesar 2.454736 mm/s yang berati roda gigi aus ini berada pada zona B (kuning), vibrasi roda gigi baik dan dapat dioperasikan karena masih dalam batas yang diizinkan.
Berdasarkan dari data hasil percobaan di atas, data yang dihasilkan adalah berupa hasil kecepatan. Sehingga berdasarkan data vibrasi yang didapatkan maka digambarkan karakteristik vibrasi dengan langkah sebagai berikut:
0 0.5 1 1.5 2 2.5 3
0 10 20 30 40 50 60 70
V
e
lo
ci
ty
(
m
m
/s
)
Time (s)
AKSIAL
HORIZONTAL
Kecepatan sudut pada kecepatan putaran poros: 400 Rpm, maka:
s rad x400 41,86 / 60
2
Frekuensi motor dapat dihitung: f
2 ,sehingga
2 f Maka: Hz
f 6,67
2 86 , 41
2
Sehingga Perioda motor dapat dihitung adalah sebagai berikut:
Amplitodo dapat dapat dihitung melalui persamaan velocity yang di dapat dari hasil transduser, dengan demikian persamaan amplitudo dapat dihitung sebagai berikut:
t A x .cos
t x A cos s mm
A 0,020902 /
06 , 0 ). 86 , 41 cos( 86 , 41 0.708337
Untuk menghitung acceleration dapat dicari dengan mendifferensialkan persamaan velocity sebagai berikut:
dt x d x
dt
t
A
d
x
(
.
cos
)
s f
T 0,149
06 , 0 ). 86 , 41 sin( 0,020902 .
) 86 , 41
( 2
x
x= 21,55705mm/s2
[image:53.595.113.388.303.628.2]Dari hasil perhitungan acceleration yang didapat dari mendifferensialkan persamaan velocity dapat dilihat pada tabel 4.5 sebagai berikut:
Table 4.5. Hasil perhitungan acceleration roda gigi aus pada putaran 400 Rpm
Acceleration Roda Gigi Aus (mm/s2)
Time (s) Aksial Horizontal Vertikal
0,06 21.55705 0.071377 0.068756
0.12 19.16773 0.071377 0.066157
0.18 10.34 0.071377 0.005085
0.24 26.44514 0.071377 0.005085
0.30 0.071377 0.071377 4.682966
0.36 7.038718 8.27898 0.005085
0.42 33.02946 12.61989 1.696919
0.48 0.071377 10.06641 1.029021
0.54 69.41648 3.445614 0.005085
0.60 0.071377 20.84573 1.630649
Gambar 4.5 Acceleration roda gigi aus pada putaran 400 Rpm
Dapat dilihat dari gambar grafik acceleration roda gigi aus bahwa untuk amplitudo yang dihasilkan memiliki amplitudo terbesar pada arah aksial.
Untuk menghitung displacement dapat dicari dengan mengintegralkan persamaan velocity sebagai berikut:
x(t)
x
t A x .sin
mm 0,012286 06 , 0 ). 86 , 41 sin( . 0.020902 x x
Dari hasil perhitungan displacemen yang didapat dengan mengintegralkan persamaan velocity dapat dilihat pada tabel 4.6 sebagai berikut:
0 10 20 30 40 50 60 70 80
0 10 20 30 40 50 60 70
Table 4.6. Hasil pengukuran displacement roda gigi aus pada putaran 400 Rpm
Displacement Roda Gigi Normal (mm)
Time (s) Aksial Horizontal Vertikal
0,06 0.012286 4.07E-05 3.92E-05
0.12 0.010924 4.07E-05 3.77E-05
0.18 0.005893 4.07E-05 2.9E-06
0.24 0.015072 4.07E-05 2.9E-06
0.30 4.07E-05 4.07E-05 0.002669
0.36 0.004012 0.004718 2.9E-06
0.42 0.018825 0.007192 0.000967
0.48 4.07E-05 0.005737 0.000586
0.54 0.039563 0.001964 2.9E-06
0.60 4.07E-05 0.011881 0.000929
Gambar 4.6. Displacement roda gigi aus pada putaran 400 Rpm
Dapat dilihat dari gambar grafik disaplacement roda gigi aus bahwa untuk amplitudo yang dihasilkan memiliki amplitudo terbesar pada arah aksial.
4.2.3 Karakteristik Getaran Pada Roda Gigi Patah
Hasil pengukuran getaran pada roda gigi patah dapat di lihat pada tabel 4.7 berikut ini
Table 4.7. Hasil pengukuran velocity roda gigi patah pada putaran 400 Rpm
Velocity Roda Gigi Patah (mm/s)
Time (s) Aksial Horizontal Vertikal
0,06 1.736159 0.002345 0.002345
0.12 2.008248 0.002345 0.002345
0.18 1.107479 0.002345 0.062277
0.24 2.010046 0.002345 0.002345
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.045
0 10 20 30 40 50 60 70
D
is
p
la
ce
m
e
n
t
(m
m
)
Time (s)
AKSIAL
HORIZONTAL
[image:56.595.114.375.537.730.2]0.36 2.075371 0.543526 0.002345
0.42 0.933679 0.26904 1.912358
0.48 2.07597 0.545323 0.002345
0.54 1.824258 0.302602 1.393352
0.60 2.088556 0.241472 0.002345
[image:57.595.112.533.335.534.2]Dari tabel diatas dapat di gambarkan grafik velocity vs time seperti gambar 4.7 sebagai berikut:
Gambar 4.7 Velocity roda gigi patah pada putaran 400 Rpm
Jika dikaitkan dengan standart indicator uji kelayakan mesin ISO 2372 (BS4675) kelas I, data getaran yang dihasilkan pada velocity roda gigi patah memiliki amplitudo sebesar 2.454736 mm/s yang berati roda gigi patah ini berada pada zona B (kuning), vibrasi roda gigi baik dan dapat dioperasikan karena masih dalam batas yang diizinkan.
Berdasarkan dari data hasil percobaan di atas, data yang dihasilkan adalah berupa hasil kecepatan. Sehingga berdasarkan data vibrasi yang didapatkan maka digambarkan karakteristik vibrasi dengan langkah sebagai berikut:
0 0.5 1 1.5 2 2.5
0 10 20 30 40 50 60 70
V
e
lo
ci
ty
(
m
m
/s
)
Time (s)
AKSIAL
HORIZONTAL
Kecepatan sudut pada kecepatan putaran poros: 400 Rpm, maka:
s rad x400 41,86 / 60
2
Frekuensi motor dapat dihitung: f
2 ,sehingga
2 f Maka: Hz
f 6,67
2 86 , 41
2
Sehingga perioda motor dapat dihitung adalah sebagai berikut:
Amplitodo dapat dapat dihitung melalui persamaan velocity yang di dapat dari hasil transduser, dengan demikian persamaan amplitudo dapat dihitung sebagai berikut:
t A x .cos
t x A cos s mm A A / 0,051232 06 , 0 ). 86 , 41 cos( 86 , 41 1,736159
Untuk menghitung acceleration dapat dicari dengan mendifferensialkan persamaan velocity sebagai berikut:
dt x d x
t
A
d
x
(
.
cos
)
s f
T 0,149
06 , 0 ). 86 , 41 sin( 4 0,051232 .
) 86 , 41
( 2
x
52,83712
x
mm/s2
[image:59.595.112.376.303.630.2]Dari hasil perhitungan acceleration yang didapat dari mendifferensialkan persamaan velocity dapat dilihat pada tabel 4.8 sebagai berikut:
Table 4.8. Hasil perhitungan acceleration roda gigi patah pada putaran 400 Rpm
Acceleration Roda Gigi Patah (mm/s2)
Time (s) Aksial Horizontal Vertikal
0,06 52.83712 0.071377 0.071377
0.12 61.1177 0.071377 0.071377
0.18 33.70429 0.071377 1.895289
0.24 61.17242 0.071377 0.071377
0.30 52.3994 10.72302 13.02115
0.36 63.16048 16.5413 0.071377
0.42 28.41496 8.187783 58.19945
0.48 63.17871 16.59601 0.071377
0.54 55.51827 9.209175 42.40436
0.60 63.56174 7.348785 0.071377
Gambar 4.8. Acceleration roda gigi patah pada putaran 400 Rpm
Dapat dilihat dari gambar grafik acceleration roda gigi patah bahwa untuk amplitudo yang dihasilkan memiliki amplitudo terbesar pada arah aksial.
Untuk menghitung displacement dapat dicari dengan mengintegralkan persamaan velocity sebagai berikut:
x(t)
x
t A x .sin
.mm 0,030114 06 , 0 ). 86 , 41 sin( . 0,051232 x x
Dari hasil perhitungan displacemen yang didapat dengan mengintegralkan persamaan velocity dapat dilihat pada tabel 4.9 sebagai berikut:
0 10 20 30 40 50 60 70
0 10 20 30 40 50 60 70
Table 4.9. Hasil perhitungan displacement roda gigi pada putaran 400 Rpm
Displacement Roda Gigi Patah (mm)
Time (s) Aksial Horizontal Vertikal
0,06 0.030114 4.07E-05 4.07E-05
0.12 0.034833 4.07E-05 4.07E-05
0.18 0.019209 4.07E-05 0.00108
0.24 0.034864 4.07E-05 4.07E-05
0.30 0.029864 0.006111 0.007421
0.36 0.035997 0.009427 4.07E-05
0.42 0.016195 0.004666 0.03317
0.48 0.036008 0.009459 4.07E-05
0.54 0.031642 0.005249 0.024168
0.60 0.036226 0.004188 4.07E-05
Gambar 4.9 Displacement roda gigi patah pada putaran 400 Rpm
Dapat dilihat dari gambar grafik displacement roda gigi patah bahwa untuk amplitudo yang dihasilkan memiliki amplitudo terbesar pada arah aksial.
4.2.4 Karakteristik Getaran Pada Roda Gigi Sompel
Hasil pengukuran getaran pada roda gigi pecah dapat di lihat pada tabel 4.10 berikut ini:
Table 4.10. Hasil pengukuran velocity roda gigi sompel pada putaran 400 Rpm
Velocity Roda Gigi Sompel (mm/s)
Time (s) Aksial Horizontal Vertikal
0,06 2.340867 0.503372 1.081709
0.12 0.079058 1.088901 0.466813
0.18 1.096093 0.422464 0.01553
0.24 0.002345 0.27743 0.161163
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04
0 10 20 30 40 50 60 70
D
is
p
la
ce
m
e
n
t
(m
m
)
Time (s)
AKSIAL
HORIZONTAL
0.36 2.454736 0.156369 0.503971
0.42 2.454736 0.965442 0.645409
0.48 0.002345 0.182139 0.184537
0.54 2.454736 0.221095 0.548919
0.60 2.454736 0.160564 0.311591
Dari tabel diatas dapat di gambarkan grafik velocity vs time seperti gambar 4.10 sebagai berikut:
Gambar 4.10. Velocity roda gigi sompel pada putaran 400 Rpm
Jika dikaitkan dengan standart indicator uji kelayakan mesin ISO 2372 (BS4675) kelas I, data getaran yang dihasilkan pada velocity roda gigi sompel memiliki amplitudo sebesar 2.454736 mm/s yang berati roda gigi sompel ini berada pada zona B (kuning), vibrasi roda gigi baik dan dapat dioperasikan karena masih dalam batas yang diizinkan.
0 0.5 1 1.5 2 2.5 3
0 10 20 30 40 50 60 70
V
e
lo
ci
ty
(
m
m
/s
)
Time (s)
AKSIAL
HORIZONTAL
Berdasarkan dari data hasil percobaan di atas, data yang dihasilkan adalah berupa hasil kecepatan. Sehingga berdasarkan data vibrasi yang didapatkan maka digambarkan karakteristik vibrasi dengan langkah sebagai berikut:
Kecepatan sudut pada kecepatan putaran poros: 400 rpm, maka:
s rad x400 41,86 / 60
2
Frekuensi motor dapat dihitung: f
2 ,sehingga
2 f Maka: Hz
f 6,67
2 86 , 41
2
Sehingga Perioda motor dapat dihitung adalah sebagai berikut:
Amplitodo dapat dapat dihitung melalui persamaan velocity yang di dapat dari hasil transduser, dengan demikian persamaan amplitudo dapat dihitung sebagai berikut:
t A
x. .cos.
t c x A .
s mm A A / 0,069077 06 , 0 ). 86 , 41 cos( 86 , 41 2.340867 Untuk menghitung acceleration dapat dicari dengan mendifferensialkan persamaan velocity sebagai berikut:
s f
T 0,149
dt
t
A
d
x
(
.
cos
)
t A x2 sin 06 , 0 ). 86 , 41 sin( 0,069077 . ) 86 , 41 ( 2 x 2 mm/s 71,24041 x
Dari hasil perhitungan acceleration yang didapat dari mendifferensialkan persamaan velocity dapat dilihat pada tabel 4.11 sebagai berikut:
Table 4.11. Hasil perhitungan acceleration roda gigi sompel pada putaran 400 Rpm
Acceleration Roda Gigi Sompel (mm/s2)
Time (s) Aksial Horizontal Vertikal
0,06 71.24041 15.31928 32.92002
0.12 2.405984 33.1389 14.20669
0.18 33.35777 12.857 0.472638
0.24 0.071377 8.443131 4.904741
0.30 74.34105 15.72054 5.561349
0.36 74.70582 4.758828 15.33752
0.42 74.70582 29.38163 19.64195
0.48 0.071377 5.543111 5.616069
0.54 74.70582 6.728654 16.70545
Dari tabel diatas dapat di gambarkan grafik acceleration vs time seperti gambar 4.11 sebagai berikut:
Gambar 4.11. Acceleration roda gigi sompel pada putaran 400 Rpm Dapat dilihat dari gambar grafik acceleration roda gigi sompel bahwa untuk amplitudo yang dihasilkan memiliki amplitudo terbesar pada arah aksial.
Untuk menghitung displacement dapat dicari dengan mengintegralkan persamaan velocity sebagai berikut:
x(t)
x
t A
x .sin....
mm 0,040602 06 , 0 ). 86 , 41 sin( 0.069077 x x
Dari hasil perhitungan displacemen yang didapat dengan mengintegralkan persamaan velocity dapat dilihat pada tabel 4.12 sebagai berikut:
0 10 20 30 40 50 60 70 80
0 10 20 30 40 50 60 70
Table 4.12. Hasil perhitungan displacement roda gigi sompel pada putaran 400 Rpm
Displacement Roda Gigi Sompel (mm)
Time (s) Aksial Horizontal Vertikal
0,06 0.040602 0.008731 0.018762
0.12 0.001371 0.018887 0.008097
0.18 0.019012 0.007328 0.000269
0.24 4.07E-05 0.004812 0.002795
0.30 0.042369 0.00896 0.00317
0.36 0.042577 0.002712 0.008741
0.42 0.042577 0.016746 0.011195
0.48 4.07E-05 0.003159 0.003201
0.54 0.042577 0.003835 0.009521
0.60 0.042577 0.002785 0.005405
Gambar 4.12. Displacement rodagigi sompel pada putaran 400 Rpm Dapat dilihat dari gambar grafik acceleration roda gigi sompel bahwa untuk amplitudo yang dihasilkan memiliki amplitudo terbesar pada arah aksial.
4.3 Simpangan Maksimum (Amplitudo)
Dari hasil analisa di atas maka besarnya simpangan maksimum pada masing-masing roda gigi normal, roda gigi aus, roda gigi sompel dan roda gigi patah dapat di lihat pada tabel sebagai berikut:
4.3.1. Simpangan Maksimum (Amplitudo) 400 rpm
Dari hasil pengukuran data didapat simpangan maksimum (amplitudo) seperti yang pada tabel 4.13 dibawah ini:
Tabel 4.13. Amplitudo maksimum 400 rpm
Tipe aksial horizontal vertikal
Roda gigi normal 0,156968 0,1593655 0,159366
Roda gigi aus 2,454736 2,016039 2,454736
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.045
0 10 20 30 40 50 60 70
D
is
p
la
ce
m
e
n
t
(m
m
)
Time (s)
AKSIAL
HORIZONTAL
Roda gigi sompel 2,454736 1,908762 2,454736
Roda gigi patah 2,427767 1,536588 2,404993
Dari hasil data di atas dapat digambarkan grafik simpangan maksimum tiap masing-masing roda gigi seperti gambar 4.13 sebagai berikut:
Gambar 4.13. Grafik amplitudo maksimum 400 rpm
Jika dilihat dari grafik amplitudo maksimum masing-masing roda gigi pada kecepatan 400 Rpm dapat di lihat bahwa pada pada roda gigi aus dan roda gigi sompel memiliki amplitudo terbesar pada arah aksial dan vertical yaitu sebesar 2,454736 mm/s.
4.3.2. Simpangan Maksimum (Amplitudo) 500 rpm
Dari hasil pengukuran data didapat simpangan maksimum (amplitudo) seperti yang pada tabel 4.14 dibawah ini:
0 0.5 1 1.5 2 2.5 3
Roda gigi normal
Roda gigi aus Roda gigi sompel
Roda gigi patah
A
m
p
li
tu
d
o
(
m
m
/s
)
aksial
horizontal
Tabel 4.14. Amplitudo maksimum 500 rpm
Tipe aksial horizontal vertikal
Roda gigi normal 0,158167 0,1611634 0,159366
Roda gigi aus 2,447545 1,429311 2,454137
Roda gigi sompel 1,282479 1,440099 2,38162
Roda gigi patah 2,127511 1,500629 1,688214
Dari hasil data di atas dapat digambarkan grafik simpangan maksimum tiap masing-masing roda gigi seperti gambar 4.14 sebagai berikut:
Gambar 4.14. Grafik amplitudo maksimum 500 rpm
Jika dilihat dari grafik amplitudo maksimum masing-masing roda gigi pada kecepatan 500 Rpm dapat di lihat bahwa pada pada roda gigi sompel
0 0.5 1 1.5 2 2.5 3
Roda gigi normal
Roda gigi aus
Roda gigi sompel
Roda gigi patah
A
m
p
li
tu
d
o
(
m
m
/s
)
aksial
horizontal
4.3.3. Simpangan Maksimum (Amplitudo) 600 rpm
Dari hasil pengukuran data didapat simpangan maksimum (amplitude) seperti yang pada tabel 4.15 dibawah ini:
Tabel 4.15. Amplitudo maksimum 600 rpm
Tipe aksial horizontal vertikal
Roda gigi normal 0,157568 0,1558756 0,158766
Roda gigi aus 2,417579 0,1723432 2,447545
Roda gigi sompel 0,901316 0,254241 2,385216
Roda gigi patah 1,992066 0,116103 1,769122
Dari hasil data di atas dapat digambarkan grafik simpangan maksimum tiap masing-masing roda gigi seperti gamabar 4.15 sebagai berikut:
Gambar 4.15. Grafik amplitude maksimum 600 rpm
0 0.5 1 1.5 2 2.5 3
Roda gigi normal
Roda gigi aus Roda gigi som