1
PENDAHULUAN
1.1 Latar Belakang
Pos pelayanan terpadu (Posyandu) adalah suatu bentuk keterpaduan layanan kesehatan yang dilaksanakan di suatu wilayah kerja Puskesmas, posyandu merupakan pos terdepan dalam mendeteksi gangguan kesehatan masyarakat. Posyandu diselenggarakan dari, oleh dan untuk masyarakat yang dibantu oleh petugas kesehatan setempat, dimana dalam satu unit posyandu, idealnya melayani sekitar 100 balita (120 kepala keluarga) yang disesuaikan dengan kemampuan petugas dan keadaan setempat yang dibuka sebulan sekali. Kegiatannya berupa KIA, KB, P2M (Imunisasi dan Penanggulangan Diare), dan Gizi (Penimbangan Balita).
Pada umumnya setiap ibu menginginkan balitanya sehat, bahkan untuk mengontrol pertumbuhannya, para ibu selalu rutin membawa balitanya untuk ditimbang dan diukur pertumbuhan tinggi badannya di posyandu. Hasil penimbangan akan memberikan informasi bagi para ibu, sejauh mana perkembangan, pertumbuhan dan gizi balitanya.
Proses penimbangan balita di posyandu, biasanya menggunakan timbangan tradisional yang digantung di sebuah ruangan dengan wadah menggunakan kain sarung dan alat ukurnya masih menggunakan meteran kain. Kemudian untuk proses pencatatan hasil masih di catat secara manual oleh petugas posyandu.
1.2 Rumusan Masalah
Sesuai dengan identifikasi masalah yang dipaparkan sebelumnya, maka dalam pembuatan tugas akhir ini penulis merumuskan beberapa masalah sebagai berikut :
Bagaimana membuat alat untuk mengukur berat dan panjang badan bayi. Bagaimana alat tersebut dapat terintegrasi dengan komputer.
Bagaimana menentukan status gizi balita dari hasil timbang dan usia secara otomatis.
1.3 Maksud dan Tujuan
Dengan mempertimbangkan latar belakang, maka maksud dari pembuatan Instrumen Evaluator Status Gizi Balita pada Posyandu diharapkan memudahkan petugas Posyandu dalam melakukan penimbangan dan pengukuran panjang badan bayi serta tinggi badan balita.
Tujuan utama yang ingin dicapai dalam tugas akhir ini adalah membuat alat ukur berat dan panjang tubuh bayi yang dapat terintegrasi secara langsung dengan aplikasi dan database pada komputer dan untuk meningkatkan efisiensi dari alat tersebut, aplikasi memberikan kesimpulan status gizi pada bayi.
1.4 Batasan Masalah
Batasan masalah dalam perancangan ini adalah :
Penulis hanya membahas alat untuk menimbang dan mengukur panjang badan (hardware).
Parameter pengukuran hanya berat dan panjang badan bayi.
Berat maksimal pada timbangan bayi adalah 20 kg sedangkan timbangan balita adalah 30 kg.
1.5 Metode Penelitian
Metode penelitian yang digunakan dalam pengerjaan tugas akhir ini adalah sebagai berikut :
Studi literatur
Mempelajari berbagai literatur dari buku maupun internet yang berhubungan dengan masalah yang dihadapi dalam pembuatan alat baik karakteristik dari komponen, teknik penggunaannya dan teknik merangkai komponen serta teknik-teknik dasar yang digunakan dengan maksud untuk memperoleh data yang sesuai dan tepat.
Observasi
Mengunjungi Posyandu serta melakukan wawancara dengan petugas Posyandu.
Perancangan Alat
Perancangan mikrokontroler dan mengumpulkan komponen-komponen yang akan digunakan dalam pembuatan alat yang sesuai dengan kebutuhan dan hasil bimbingan dengan dosen pembimbing. Eksperimen
Hal ini dilakukan dengan merealisasikan pembuatan hardware dan
software. Kemudian melakukan percobaan serta menganalisa kerja
hardware tersebut. Pengujian
Pengujian dan analisis merupakan metode untuk mengetahui hasil dari perancangan sistem yang telah selesai dibuat, apakah sudah sesuai dengan yang direncanakan atau masih terdapat kekurangan, selanjutnya akan dilakukan pengujian secara teoritis maupun praktis, sehingga pada akhirnya dapat diperoleh suatu kesimpulan dari hasil penelitian.
1.6 Sistematika Penulisan
BAB I : PENDAHULUAN
Pada bab ini menjelaskan tentang latar belakang, rumusan masalah, maksud dan tujuan penelitian, batasan masalah, metode penelitian dan sistematika penulisan.
BAB II : LANDASAN TEORI
Pada bab ini membahas dasar-dasar teori dari hardware dan software yang diperlukan untuk perancangan perangkat ini.
BAB III : PERANCANGAN SISTEM
Pada bab ini membahas tentang perancangan hardware dan software dari alat yang dibuat serta cara kerja dari alat tersebut.
BAB IV : PENGUJIAN DAN PEMBAHASAN
Pada bab ini membahas tentang hasil penelitian dan hasil pengujian dari alat yang telah dibuat.
BAB V : KESIMPULAN DAN SARAN
Bab ini membahas tentang kesimpulan dan saran yang bermanfaat bagi perbaikan dan perkembangan alat penimbang dan pengukur badan bayi ini. DAFTAR PUSTAKA
5
LANDASAN TEORI
2.1 Konsep Dasar Posyandu
Pada konsep dasar Posyandu, akan menjelaskan tentang pengertian Posyandu, sejarah Posyandu, tujuan penyelenggaraan Posyandu, sasaran pelayanan kesehatan, serta kegiatan apa saja yang ada pada Posyandu.
2.1.1 Pengertian Posyandu
Pos Pelayanan Terpadu (Posyandu) adalah suatu forum komunikasi, alih teknologi dan pelayanan kesehatan masyarakat oleh dan untuk masyarakat yang mempunyai nilai strategis untuk mengembangkan sumber daya manusia sejak dini. Posyandu adalah pusat pelayanan Keluarga Berencana dan Kesehatan yang dikelola dan diselenggarakan untuk dan oleh masyarakat dengan dukungan teknis dari petugas kesehatan dalam rangka pencapaian NKKBS. [2]
Pos Pelayanan Terpadu (Posyandu) merupakan salah satu lembaga pedesaan atau pendukuhan yang menampung dan menjadi wahana partisipasi masyarakat dalam program Keluarga Berencana dan Kesehatan. [6]
2.1.2 Sejarah Posyandu
Dimasa lalu Posyandu dikembangkan oleh masyarakat sebagai dua jenis Pos Pelayanan, yaitu Pos Pelayanan KB dan Pos Pelayanan Kesehatan. Pos Pelayanan KB dibantu oleh jajaran BKKBN, sedangkan Pos Kesehatan Desa dibantu oleh jajaran Departemen dan Dinas Kesehatan. Karena sasaran kedua Pos Pelayanan hampir sama, sehingga dalam praktek, waktu dan kegiatan kedua jenis Pos tersebut dipadukan oleh masyarakat.
2.1.3 Tujuan Penyelenggaraan Posyandu
a. Mempercepat penurunan angka kematian ibu dan anak.
c. Meningkatkan kemampuan masyarakat untuk mengembangkan kegiatan kesehatan dan kegiatan-kegiatan lain yang menunjang peningkatan kemampuan hidup sehat.
d. Pendekatan dan pemerataan pelayanan kesehatan kepada masyarakat dalam usaha meningkatkan cakupan pelayanan kesehatan kepada penduduk berdasarkan letak geografi.
e. Meningkatkan dan pembinaan peran serta masyarakat dalam rangka alih teknologi.
2.1.4 Sasaran dalam Pelayanan Kesehatan di Posyandu a. Bayi berusia kurang dari 1 tahun.
b. Anak balita usia 1 sampai 5 tahun. c. Ibu hamil, ibu menyusui dan ibu nifas. d. Wanita Usia Subur (WUS).
2.1.5 Kegiatan Posyandu a. Kesehatan ibu dan anak. b. Keluarga Berencana. c. Imunisasi.
d. Peningkatan gizi.
e. Pencegahan dan penanggulangan diare. 2.2 Perangkat Keras
Perangkat keras utama yang digunakan dalam Tugas Akhir ini adalah Arduino Uno, sensor flexiforce, sensor ultrasonik, LCD, serta Tri state buffer
sebagai komponen switching. 2.2.1 Arduino Uno
tegangan DC dari baterai atau adaptor AC ke DC. Arduino uno menggunakan ATmega16U2 yang diprogram sebagai USB-to-serial converter untuk komunikasi serial dengan komputer melalui port USB. Pada tabel 2.1 di bawah merupakan spesifikasi Arduino Uno secara lengkap :
Tabel 2.1 Deskripsi Arduino Uno
Mikrokontroler ATmega 328
Tegangan kerja 5V
Tegangan masukan 7-12V (rekomendasi)
Tegangan masukan 6-20V (batas)
I/O 14 pin (6 pin untuk PWM)
Arus DC per I/O 40mA
Arus DC untuk pin 3.3V 50mA
Flash Memory 32 KB dengan 0.5 KB digunakan untuk bootloader
SRAM 2 KB
EEPROM 1 KB
Kecepatan clock 16MHz
Berikut adalah contoh gambar board sistem minimum Arduino Uno pada gambar 2.1 :
2.2.1.1 Catu Daya
Arduino uno dapat diberi daya melalui koneksi USB (Universal Serial Bus) atau melalui power supply eksternal. Jika arduino uno dihubungkan dengan kedua sumber daya tersebut secara bersamaan maka arduino uno akan memilih salah satu sumber daya secara otomatis untuk digunakan. Power supply ekternal (yang bukan melalui USB) dapat berasal dari adaptor AC ke DC atau baterai. Adaptor dapat dihubungkan ke soket power pada arduino uno. Jika menggunakan baterai, ujung kabel dihubungkan kedalam pin GND dan Vin yang berada pada konektor POWER.
Arduino uno dapat beroperasi pada tegangan 6 sampai 20 volt. Jika arduino uno mendapat tegangan di bawah 7 volt, kemungkinan tegangan pada pin 5V menjadi di bawah 5 volt dan kinerja arduino uno menjadi tidak stabil. Jika mendapat tegangan lebih dari 12 volt, penstabil tegangan kemungkinan akan menjadi terlalu panas dan merusak arduino uno. Tegangan rekomendasi yang diberikan ke arduino uno berkisar antara 7 sampai 12 volt.
Pin-pin teganan pada Arduino uno sebagai berikut:
Vin adalah pin untuk mengalirkan sumber tegangan ke arduino uno ketika menggunakan sumber daya eksternal (selain dari koneksi USB atau sumber daya yang teregulasi lainnya). Sumber tegangan juga dapat disediakan melalui pin ini jika sumber daya yang digunakan untuk Arduino uno dialirkan melalui soket power.
5V adalah pin yang menyediakan tegangan teregulasi sebesar 5 volt berasal dari regulator tegangan pada arduino uno.
3.3V adalah pin yang meyediakan tegangan teregulasi sebesar 3,3 volt berasal dari regulator tegangan pada arduino uno.
GND adalah pin ground.
2.2.1.2 Memory
ATmega328 ini memiliki 32 KB dengan 0,5 KB digunakan untuk
2.2.1.3 Input dan Output
Masing-masing dari 14 pin digital pada Arduino uno dapat digunakan sebagai input atau output, menggunakan fungsi pinMode(), digitalWrite(), dan digitalRead(). Pin-pin ini beroperasi pada tegangan 5 volt. Setiap pin dapat memberikan atau menerima arus DC maksimum 40 mA dan memiliki resistor pull-up internal dari 20-50 KΩ. Selain itu, beberapa pin memiliki fungsi khusus:
Serial: Pin 0 (RX) dan 1 (TX). Digunakan untuk menerima (RX) dan mengirimkan (TX) data TTL serial. Pin ini terhubung dengan pin yang sesuai dari chip ATmega16U2 USB-to-Serial TTL.
External Interrupts: Pin 2 dan 3. Pin ini dapat dikonfigurasi untuk memicu interupsi yang kondisinya dapat diatur.
PWM: Pin 3, 5, 6, 9, 10, dan 11. Menyediakan 8-bit output PWM dengan menggunakan fungsi analogWrite ().
SPI: Pin 10 (SS), 11 (mosi), 12 (MISO), 13 (SCK). Pin ini mendukung komunikasi SPI.
LED: Pin 13. Ada sebuah LED yang terhubung dengan pin digital 13. Ketika pin mendapat nilai HIGH, LED menyala dan ketika pin mendapat nilai LOW, LED padam.
Arduino Uno memiliki 6 input analog, yang masing-masing memiliki resolusi 10 bit, atau 1024 desimal. Tegangan default pengukuran dari 0 sampai 5 volt, dapat pula diatur untuk jangkauan pengukuran menggunakan pin AREF dan fungsi analogReference(). Selain itu, beberapa pin memiliki fungsi khusus:
TWI: Pin A4 atau SDA dan pin A5 atau SCL. Mendukung komunikasi TWI (Two Wire Interface) atau biasa disebut I2C (Inter Integrated Circuit).
AREF: Pin referensi tegangan untuk input analog. Dengan menggunakan fungsi analogReference().
2.2.1.4 Komunikasi
Arduino Uno memiliki sejumlah fasilitas untuk berkomunikasi dengan komputer, Arduino lain, atau mikrokontroler lain. ATmega328 ini menyediakan UART TTL (5V) komunikasi serial, yang tersedia pada pin digital 0 (RX) dan pin digital 1 (TX). Sebuah ATmega16U2 yang digunakan untuk melakukan komunikasi serial melalui USB dan dikenali oleh sistem operasi komputer sebagai
COM port virtual. Firmware Arduino Uno menggunakan driver USB COM standar, dan tidak membutuhkan driver eksternal. Namun, pada sistem operasi Windows, diperlukan file ber-ekstensi Inf. Perangkat lunak Arduino termasuk serial monitor
yang memungkinkan data dapat dikirim dan diterima dari Arduino board. LED RX dan TX di board Arduino berkedip ketika data sedang dikirim atau diterima melalui
chipUSB-to-serial (ATmega16U2) dan koneksi USB ke komputer. ATmega328 ini juga mendukung komunikasi TWI (I2C) dan SPI.
2.2.1.5 Programming
Arduino Uno dapat diprogram dengan perangkat lunak Arduino. Pertama pilih Arduino Uno dari Tools lalu sesuaikan dengan mikrokontroler yang digunakan. ATmega328 pada Arduino Uno memiliki bootloader yang memungkinkan Anda untuk meng-upload program baru tanpa menggunakan
downloader eksternal. Komunikasi menggunakan protokol STK500 dan compiler
dengan bahasa C. Sistem dapat menggunakan perangkat lunak FLIP Atmel (Windows) atau programmer DFU (Mac OS X dan Linux) untuk memuat firmware
baru, dapat juga menggunakan header ISP dengan programmer eksternal. 2.2.1.6 Perangkat Lunak (Arduino Sketch)
Perangkat lunak yang digunakan untuk Arduino disebut Sketch. Sketch ini ditulis dalam editor teks. Sketch disimpan dengan ekstensi file .ino. Sketch memiliki fitur untuk copy / cut / paste dan untuk searching / replacing teks. Pada bagian pesan memberikan feedback saat menyimpan, mengekspor dan juga menampilkan pesan error. Pada bagian sudut kanan bawah aplikasi, menampilkan nomor port Serial board Arduino yang sedang digunakan. Pada bagian toolbar
Arduino sketch merupakan compiler yang merubah bahasa tingkat tinggi menjadi bahasa mesin. Hasil dari compiler berupa file .hex yang dapat memberi logika sebuah mikrokontroler untuk dapat beroperasi. Arduino board akan beroperasi sesuai dengan perintah pada perangkat lunak yang ditanamkan padanya. Bahasa pemrograman Arduino sketch menggunakan bahasa pemrograman C sebagai dasarnya. Karena menggunakan dasar bahasa pemrograman C, bahasa pemrograman Arduino sketch memiliki banyak sekali kemiripan, walaupun beberapa hal telah dirubah.
Setiap program dalam Arduino sketch terdiri dari dua fungsi utama yaitu fungsi setup() dan fungsi loop(). Instruksi yang berada dalam fungsi setup() dieksekusi sekali ketika Arduino board pertama dihidupkan (booting). Pada dasarnya instuksi yang berada pada fungsi setup(), merupakan konfigurasi dan inisialisasi dari Arduino sketch. Instruksi yang berada pada fungsi loop() dieksekusi berulang-ulang hingga Arduino board off (catu daya diputus). Fungsi loop() merupakan tugas utama dari Arduino sketch. Gambar 2.2 merupakan contoh tampilan dari Arduino sketch.
2.2.2 Sensor Flexiforce
Sensor flexiforce merupakan sebuah sensor gaya (force) yang mampu mengkonversi nilai gaya (N) kedalam bentuk resistansi elektrik, sensor ini berbentuk printed circuit yang cukup tipis dan fleksibel. Gambar 2.3 merupakan contoh dari sensor flexiforce beserta spesifikasinya :
Gambar 2.3 Sensor Flexiforce
- Memiliki range deteksi gaya hingga 100 lbs, dimana 1 lb setara dengan 4.4 N, sehingga jika dikonversi dalam besaran newton, flexiforce memiliki range deteksi 440 N atau sekitar 45 kg.
- Linearitas yang mampu dihasilkan ±3%, dan mampu merespon perubahan gaya dengan waktu respon <5µs.
- Mampu bekerja pada rentang suhu -9 ºC hingga 60ºC.
- Namun pada sensor terjadi Repeatability dengan nilai ±2,5% dari skala penuh (kondisi sensor terjadi gaya 80%), atau dengan kata lain terjadi riak (ripple) pada output sensor.
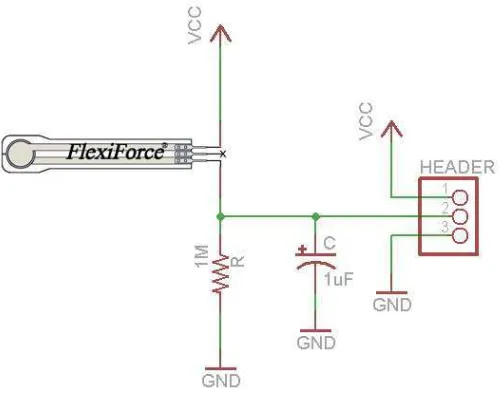
Dari sensor flexiforce yang ditunjukkan pada Gambar 2.3 dapat diperoleh suatu rangkaian pengubah output sensor yang masih berupa perubahan resistansi menjadi perubahan tegangan dengan ketentuan bahwa tegangan input harus konstan yaitu sebesar +5V, resistansi untuk sensor lebih dari 5MΩ, serta arus maksimal yang digunakan adalah 2,5mA. [1]
2.2.3 Sensor Ultrasonik HY-SRF05
disebut transmitter dan rangkaian penerima ultrasonik yang disebut receiver. Sinyal 40 kHz dibangkitkan melalui mikrokontroler. Sinyal ultrasonik yang dibangkitkan, kemudian dipancarkan transmitter, ketika sinyal mengenai benda penghalang, maka sinyal ini dipantulkan dan diterima oleh receiver ultrasonik. Sinyal yang diterima oleh receiver diteruskan menuju mikrokontroler untuk dihitung jarak terhadap benda tersebut (bidang pantul). Berikut merupakan prinsip kerja dari sensor ultrasonik seperti pada gambar 2.4 :
Gambar 2.4 Sensor Ultrasonik
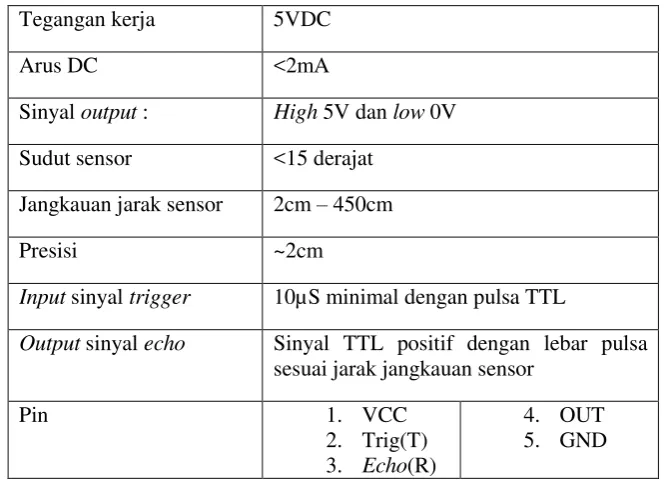
Pada tabel 2.2 menunjukkan spesifikasi lengkap dari sensor Ultrasonik HY-SRF05 beserta pin-pin yang digunakan.
Tabel 2.2 Spesifikasi sensor Ultrasonik HY-SRF05
Tegangan kerja 5VDC
Arus DC <2mA
Sinyal output : High 5V dan low 0V
Sudut sensor <15 derajat
Jangkauan jarak sensor 2cm – 450cm
Presisi ~2cm
Input sinyal trigger 10µS minimal dengan pulsa TTL
2.2.4 LCD 20x4
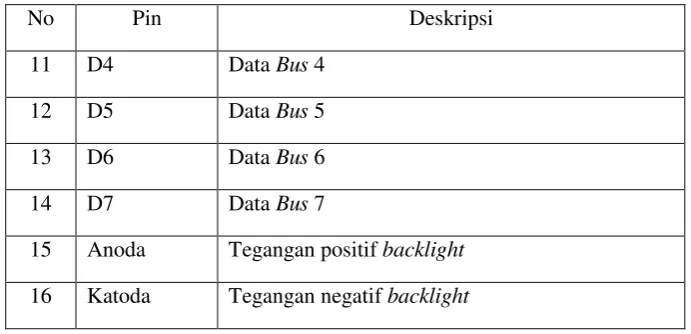
LCD (Liquid Crystal Display) adalah modul penampil yang banyak digunakan mikrokontroler. LCD yang digunakan pada tugas akhir ini ialah LCD JHD 204A. LCD JHD 204A merupakan modul LCD dengan tampilan 20x4 (20 kolom x 4 baris) dengan konsumsi daya rendah. Modul tersebut dilengkapi dengan mikrokontroler yang didesain khusus untuk mengendalikan LCD. Mikrokontroler KS0066 buatan Samsung yang berfungsi sebagai pengendali LCD memiliki CGROM (Character Generator Read Only Memory), CGRAM (Character Generator Random Access Memory), dan DDRAM (Display Data Random Access Memory). DDRAM memori untuk mengatur tempat penyimpanan karakter tersebut. Alamat awal karakter 00H dan alamat akhir 39H, alamat awal di baris kedua dimulai dari 40H. Jika ingin meletakkan suatu karakter pada baris ke-2 kolom pertama, maka harus diset pada alamat 40H. Meskipun LCD yang digunakan 16x2 atau 20x4, atau bahkan 40x2, maka penulisan programnya sama. CGRAM merupakan memori untuk menggambarkan pola sebuah karakter, dimana bentuk dari karakter dapat diubah-ubah sesuai dengan keinginan. Namun, memori akan hilang saat power supply tidak aktif sehingga pola karakter akan hilang. Berikut fungsi pin untuk LCD JHD 204A pada tabel 2.3 :
Tabel 2.3 Susunan Pin LCD
No Pin Deskripsi
1 GND 0VDC
2 VCC 5VDC
3 VEE Tegangan kontras karakter LCD
No Pin Deskripsi
11 D4 Data Bus 4
12 D5 Data Bus 5
13 D6 Data Bus 6
14 D7 Data Bus 7
15 Anoda Tegangan positif backlight
16 Katoda Tegangan negatif backlight
Perlu diketahui, driver (pengendali) LCD seperti JHD 204A memiliki dua
register yang aksesnya diatur menggunakan pin RS. Pada saat RS berlogika 0,
register yang diakses adalah perintah, sedangkan pada saat RS berlogika 1, register
yang diakses adalah register data. Agar dapat mengaktifkan LCD, proses inisialisasi harus dilakukan dengan cara mengeset bit RS dan meng-clear-kan bit En dengan delay (waktu tunda) minimal 15 ms. Kemudian mengirimkan data 30H dan ditunda lagi selama 5 ms. Proses ini harus dilakukan tiga kali, lalu mengirim inisial 20H dan interface data length dengan lebar 4 bit saja (28H). Setelah itu display dimatikan (08H) dan di-clear-kan (01H). Selanjutnya dilakukan pengesetan
display dan cursor, serta blinking apakah ON atau OFF. Pada gambar 2.5 merupakan contoh dari LCD JHD 204A.
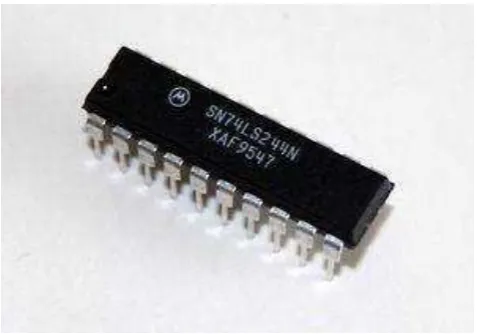
Gambar 2.5 LCD JHD 204A 2.2.5 Tri State Buffer
Terkadang dalam elektronik digital perlu mengisolasi gerbang logika dari satu sama lain atau mengalihkan jalur (switching) seperti relay. Salah satu jenis
Buffer Digital. Tri state buffer adalah seperti buffer biasa dengan tambahan input
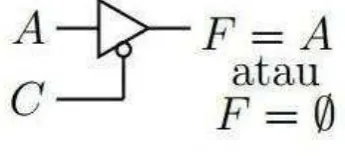
untuk mengendalikan outputbuffer (control input). Tri state buffer sangat berguna untuk mengontrol bus data dalam satu jalur yang sama agar tidak terjadi tabrakan antar data (collision). Tergantung dari kontrol input ini, output dari buffer dapat bernilai 0, 1, atau tidak berfungsi. Salah satu IC yang digunakan adalah tipe 74LS244N, sebuah IC tri state buffer dengan delapan jalur input dan output. Pada gambar 2.6 merupakan contoh IC 74LS244N.
Gambar 2.6 IC 74LS244N
Tri state buffer mempunyai 2 input, data input yaitu A dan kontrol input
Gambar 2.7 Tri state buffer non inverting
18
PERANCANGAN SISTEM
Pada bab perancangan sistem ini membahas tentang perancangan secara umum, perancangan perangkat keras, perancangan perangkat lunak dan prinsip kerja, dari masing-masing blok rangkaian.
3.1 Perancangan Secara Umum
Berikut adalah diagram blok sistem yang digunakan pada Instrumen Evaluator Status Gizi Balita pada Posyandu dan penjelasan tentang diagram blok sistem tersebut serta prinsip kerja alat yang digunakan.
3.1.1 Diagram blok sistem
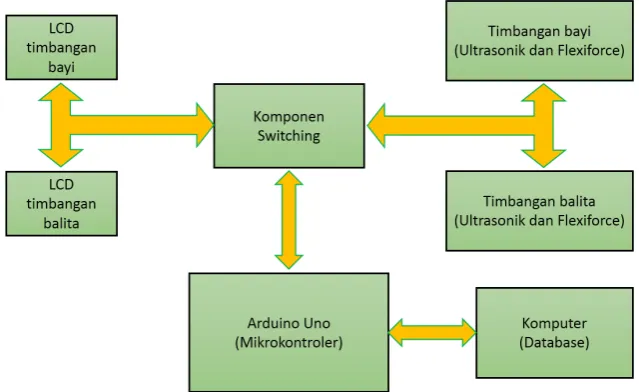
Prinsip kerja sistem yang digunakan dalam perancangan ini adalah seperti yang ditunjukkan pada gambar 3.1:
Gambar 3.1 Diagram Blok Sistem
3.1.2 Penjelasan Diagram Blok Sistem
Arduino Uno digunakan sebagai pemroses atau sebagai pengontrol utama dari sistem alat yang digunakan.
Komponen Switching (tri state buffer) digunakan karena keterbatasan pin pada Arduino Uno, komponen ini berfungsi melakukan pemilihan pada salah satu timbangan yang digunakan.
Sensor flexiforce digunakan sebagai pembaca berat badan balita, sensor akan mengirimkan data berupa tegangan sesuai dengan berat balita ke Arduino Uno.
Sensor Ultrasonik digunakan sebagai pembaca panjang balita, sensor akan mengirimkan data sinyal lebar pulsa ke Arduino Uno.
LCD digunakan sebagai media untuk menampilkan data hasil penimbangan dan pengukuran panjang badan yang dikirim oleh masing-masing sensor ke Arduino Uno.
Komputer Database untuk menyimpan data hasil penimbangan dan pengukuran, agar data yang di simpan lebih sistematis dan mudah untuk dicari kembali.
Hasil pengukuran secara otomatis akan dibandingkan dengan status gizi balita pada database, kemudian evaluasi gizi balita dapat diketahui.
3.1.3 Prinsip Kerja Alat
Prinsip kerja alat ini beroperasi setelah mendapat perintah dari komputer, pada program komputer memilih salah satu timbangan yang akan digunakan. Mikrokontroler membaca data sensor flexiforce dan ultrasonik selanjutnya mengubah data tersebut menjadi panjang badan serta berat badan kemudian dikirimkan kembali pada komputer untuk mendapatkan status gizi balita. Selain dikirim pada komputer, data panjang dan berat badan juga ditampilkan pada LCD yang terdapat pada timbangan dalam satuan centimeter (cm) dan kilogram (kg).
3.2 Perancangan Perangkat Keras
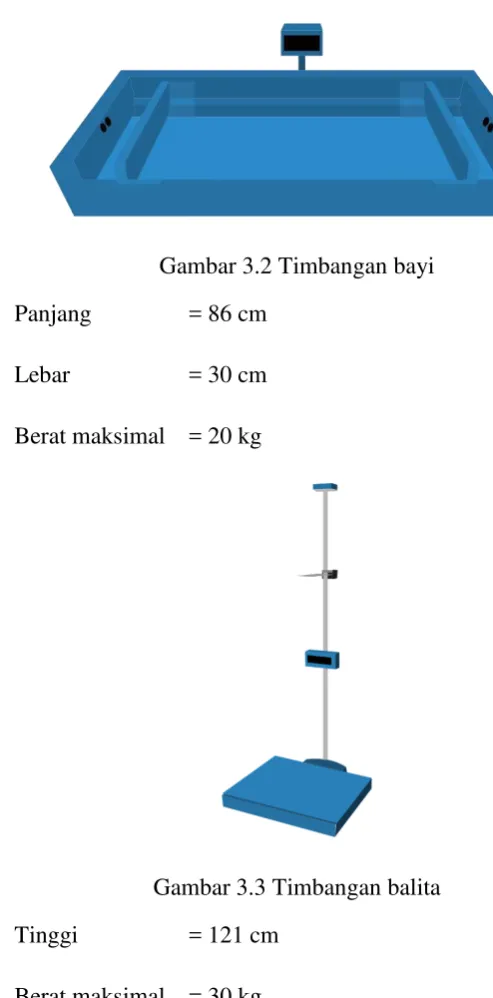
3.2.1 Perancangan Timbangan Bayi
Bahan yang digunakan sebagai baki timbangan adalah fiber glass, pemilihan bahan menggunakan fiber glass berdasarkan pertimbangan bahwa disamping kokoh, fiber glass juga lebih mudah dibentuk. Terdapat 2 buah timbangan yang masing-masing untuk bayi usia 0 bulan sampai dengan 12 bulan atau untuk anak yang belum bisa berjalan (timbangan bayi) dan untuk balita usia di bawah 60 bulan atau 5 tahun (timbangan balita). Berikut contoh timbangan bayi yang ditunjukkan pada gambar 3.2 dan timbangan balita pada gambar 3.3 :
Gambar 3.2 Timbangan bayi Panjang = 86 cm
Lebar = 30 cm
Berat maksimal = 20 kg
Gambar 3.3 Timbangan balita
Tinggi = 121 cm
3.2.2 Sensor Flexiforce
Sensor flexiforce merupakan sebuah sensor gaya (force) atau beban (load), sensor ini berbentuk printed circuit yang sangat tipis dan fleksibel. Sensor flexiforce sangat mudah diimplementasikan untuk mengukur gaya tekan antara 2 permukaan dalam berbagai aplikasi. Sensor flexiforce bersifat resistif dan nilai konduktansinya berbanding lurus dengan gaya/beban yang diterimanya. Semakin besar beban yang diterima sensor flexiforce maka nilai hambatan output-nya akan semakin menurun. Rating beban maksimum sensor flexiforce bermacam-macam, yaitu 1 lb. (4,4N), 25 lb. (110N) dan 100 lb. (440N). Berikut adalah contoh gambar sensor flexiforce pada gambar 3.4 :
Gambar 3. 4 Sensor Flexiforce
Gambar 3.5 merupakan skema rangkaian yang digunakan pada timbangan bayi dan timbangan balita.
Pada keadaan tanpa beban, resistansi sensor ini lebih dari 5MΩ. Ketika terdapat beban maksimum, resistansi sensor akan turun hingga kurang lebih 20KΩ. Dari ilustrasi tersebut dapat dilakukan kalkulasi bahwa nilai resistansi output pada flexiforce berbanding terbalik dengan gaya yang diterimanya. Bila hubungan beban/gaya dan resistansi tersebut dihubungkan dalam suatu grafik maka akan tampak seperti gambar 3.6.
Gambar 3.6 Resistansi terhadap beban
3.2.3 Sensor ultrasonik
Prinsip kerja sebuah modul sensor ultrasonik yaitu mendeteksi objek dengan cara mengirimkan gelombang ultrasonik dan kemudian menerima pantulan gelombang tersebut. Sensor ultrasonik hanya akan mengirimkan gelombang ultrasonik ketika ada pulsa trigger dari mikrokontroler (Pulsa high selama 10µS). Gelombang ultrasonik dengan frekuensi sebesar 40 KHz akan dipancarkan selama 200µS. Gelombang ini akan merambat di udara dengan kecepatan 344.424 m/detik (atau 1 cm setiap 29.034µS), mengenai objek untuk kemudian terpantul kembali ke sensor.
Jarak = (Lebar Pulsa/29.034uS) /2 (dalam cm) atau
Jarak = (Lebar Pulsa x 0.034442) /2 (dalam cm)
Berikut adalah contoh gambar sensor ultrasonik pada gambar 3.7 dan diagram waktu dari sensor Ultrasonik HY-SRF05 pada gambar 3.8 :
Gambar 3.7 Sensor Ultrasonik HY-SRF05
Gambar 3.8 Diagram waktu sensor Ultrasonik HY-SRF05
3.2.4 Pengontrol Timbangan
data numerik 0 atau 1. Setelah pengontrol mendapat sinyal dari komputer, pengontrol akan mengaktifkan salah satu timbangan dan membaca sensor yang ada pada timbangan tersebut. Data dari sensor ultrasonik berupa lebar pulsa yang dikonversi menjadi panjang (cm) dan data sensor flexiforce berupa tegangan yang dikonversi melalui ADC yang ada pada Arduino Uno menjadi berat (kg). Data panjang dan berat dikirim kembali kepada komputer untuk disimpan pada database dan diketahui status gizi dari bayi/balita yang ditimbang. Setelah mengirim data, pengontrol kembali diam dan menunggu perintah selanjutnya dari komputer. Berikut adalah skematik pengontrol timbangan pada gambar 3.9 yang digunakan pada tugas akhir ini.
Gambar 3.9 Skematik pengontrol timbangan 3.3 Perancangan Perangkat Lunak
implementasi. Perancangan perangkat lunak untuk Arduino Uno dengan compiler
arduino sketch menggunakan bahasa C.
3.3.1 Flowchart program
Perancangan flowchart program akan mempermudah dalam pembacaan program, bila nanti terjadi kesalahan (error) dapat dengan mudah diketahui dalam alur flowchart program. Di bawah ini merupakan flowchart dari program kontroler timbangan yang menggunakan Arduino Uno sebagai mikrokontroler. Flowchart
program yang digunakan seperti yang tertera pada gambar 3.10.
Gambar 3.10 Flowchart program Keterangan :
1 = Memulai program
3 = Bila sinyal dari komputer memilih timbangan bayi maka lanjut ke proses 5, bila tidak maka lompat ke pengecekan pada proses 4
4 = Bila sinyal dari komputer memilih timbangan balita maka lanjut ke proses 6, bila tidak maka ulangi menunggu sinyal dari komputer 5 = Membaca tinggi dan berat badan bayi lalu mengubahnya yang berupa
durasi waktu dari sensor ultrasonik menjadi panjang (cm) serta perubahan tegangan dari sensor flexiforcemenjadi berat (kg)
6 = Membaca tinggi dan berat badan balita lalu mengubahnya yang berupa durasi waktu dari sensor ultrasonik menjadi tinggi (cm) serta perubahan tegangan dari sensor flexiforcemenjadi berat (kg)
7 = Data panjang dan berat badan bayi/balita dikirim ke komputer untuk disimpan pada database untuk dapat mengetahui status gizi dari bayi/balita tersebut
8 = Selain dikirim ke komputer, data panjang dan berat juga ditampilkan pada panel LCD di setiap timbangan
3.3.2 Teknik Switching
Gambar 3.11 Teknik Switching
3.4 ADC
ADC (Analog to Digital Converter) berfungsi mengubah data analog yang dihasilkan oleh sensor flexiforce menjadi data digital, Arduino uno menggunakan ADC dengan resolusi 10 bit yaitu rentang data yang dihasilkan dari 0 sampai 1023 desimal. Data digital ini yang digunakan sebagai acuan penunjuk berat dengan satuan kg. Berikut merupakan konversi data analog menjadi data digital :
KD = Vref x Vin
KD = Keluaran Digital
Menghitung nilai tegangan per 1 bit atau bisa disebut sebagai nilai step size ADC pada perancangan yang telah dibuat.
SS = Resolusi ADCVref
SS = Step Size (volt)
Vref = Tegangan referensi ADC Arduino uno (5 volt) Resolusi ADC = 1023 (210– 1)
38
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Berdasarkan hasil pengujian pada bab sebelumnya, maka didapatkan kesimpulan sebagai berikut:
1. Dilihat berdasarkan tujuan utama, perancangan sistem dan hasil pengujian, alat yang telah dibuat dapat disimpulkan berhasil, walaupun masih ada sedikit kekurangan pada akurasi berat timbangan.
2. Timbangan bayi hanya dapat membaca berat maksimal 20 kg sedangkan timbangan balita 30 kg dengan tingkat ketelitian yang berubah-ubah dari 100 gr hingga 1 kg, dikarenakan sensor flexiforce yang kurang sensitif terhadap beban yang diterimanya pada berat di atas 10 kg.
3. Timbangan bayi hanya dapat membaca panjang badan minimal 10 cm dan maksimal 86 cm sedangkan timbangan balita minimal 50 cm dan maksimal 121 cm dengan tingkat ketelitian 1 cm.
5.2 Saran
Ada beberapa saran yang perlu dipertimbangkan untuk mengembangkan sistem ini menjadi lebih baik, yaitu:
1. Jika membutuhkan akurasi perubahan resistansi yang linier pada sensor timbangan, dapat menggunakan sensor tekan (force) yang lebih sensitif agar hasil penimbangan dapat lebih akurat sampai nilai maksimal penimbangan. 2. Rancang ulang model baki timbangan bayi agar lebih ringan dan tidak
29
HASIL PENGUJIAN
Pada bab ini akan dibahas tentang pengujian berdasarkan perancangan dari sistem yang dibuat. Pengujian ini dilakukan untuk mengetahui kemampuan dari sistem dan untuk mengetahui apakah sistem sudah berjalan sesuai dengan perencanaan. Pengujian ini hanya dilakukan dari hasil pengukuran berat dan panjang / tinggi badan balita oleh timbangan.
4.1 Pengujian Berat
Pengujian berat dilakukan dengan cara melakukan penimbangan dengan beban yang bervariasi mulai dari 0,1 kg sampai dengan 20 kg untuk timbangan bayi (usia 0 sampai 12 bulan) sedangkan beban 0,1 kg sampai 30 kg untuk timbangan balita (usia 13 sampai 59 bulan). Pemilihan berat maksimal pada masing-masing timbangan berdasarkan pada observasi yang telah penulis lakukan di posyandu.
Dengan melakukan penimbangan akan mempengaruhi tegangan output
Seperti yang terlihat pada tabel 4.1 dan tabel 4.2, semakin berat beban yang diterima oleh sensor flexiforce maka semakin besar error yang didapat dan tingkat akurasi timbangan semakin berkurang. Ini dikarenakan sensor flexiforce tidak mampu memberikan resistansi yang linier terhadap beban yang diterimanya. Seperti yang ditunjukkan pada grafik resistansi terhadap beban oleh flexiforce pada gambar 4.1.
Gambar 4.1 Output resistansi terhadap beban
Pada gambar 4.1 menunjukkan output resistansi dari sensor flexiforce mulai berkurang terhadap beban yang diterimanya pada beban 15 lbs atau sekitar 6,8 kg. Semakin besar beban yang diterima oleh flexiforce, perubahan resistansi semakin kecil, sehingga mengakibatkan perubahan ADC tidak signifikan. Pada lookup table
timbangan bayi, error nilai ketelitian mulai terlihat pada beban 0,4 kg, sedangkan pada timbangan balita pada beban 5,2 kg, ini dikarenakan baki timbangan bayi lebih berat dibanding penampang pada timbangan balita.
Tabel 4.3 Pengujian pada beban 5 kg sedangkan pada timbangan balita adalah -0,02 kg.
Tabel 4.4 Pengujian pada beban 7 kg Penimbangan sedangkan pada timbangan balita adalah +0,04 kg.
Penimbangan
Nilai error rata-rata pengujian beban 10 kg pada timbangan bayi adalah -0,46 kg sedangkan pada timbangan balita adalah -0,02 kg.
Tabel 4.6 Pengujian pada beban 12 kg Penimbangan
Nilai error rata-rata pengujian beban 12 kg pada timbangan bayi adalah +0,4 kg sedangkan pada timbangan balita adalah -0,14 kg.
Tabel 4.8 Pengujian pada beban 17 kg
Nilai error rata-rata pengujian beban 17 kg pada timbangan bayi adalah +0,2 kg sedangkan pada timbangan balita adalah -0,42 kg.
Tabel 4.9 Pengujian pada beban 20 kg Penimbangan sedangkan pada timbangan balita adalah -0,3 kg.
4.2 Pengujian tinggi dan panjang
Pengujian tinggi dan panjang badan pada timbangan, dilakukan dengan sensor ultrasonik. Pada timbangan bayi terdapat dua buah sensor ultrasonik yaitu pada ujung kiri dan kanan baki timbangan, kedua sensor dipakai untuk mengukur jarak antara dinding timbangan dengan papan yang menempel pada kepala dan kaki bayi. Untuk mengukur panjang badan bayi digunakan rumus sebagai berikut :
P = N – (u1+u2)
P = Panjang badan
N = Panjang baki timbangan u1 = ultrasonik 1
u2 = ultrasonik 2
Sedangkan pada timbangan baita hanya terdapat satu buah sensor ultrasonik yaitu pada ujung atas tiang timbangan, supaya pembacaan lebih akurat, maka digunakan plat besi sebagai penunjuk tinggi badan balita. Untuk mengukur panjang badan balita digunakan rumus sebagai berikut :
P = N – u
P = Panjang badan
N = Panjang tiang timbangan u = ultrasonik
Tabel 4.10 Pengujian panjang pada timbangan bayi
Tabel 4.11 Pengujian tinggi pada timbangan balita
No Panjang dari
Seperti yang tertera pada tabel 4.3 dan tabel 4.4 tentang pengujian panjang dan tinggi badan, terdapat nilai error pada pengukuran tersebut, besarnya nilai error
vi
LEMBAR PENGESAHAN ... i
LEMBAR PERNYATAAN ... ii
ABSTRAK ... iii
KATA PENGANTAR ... iv
DAFTAR ISI ... vi
DAFTAR GAMBAR ... ix
DAFTAR TABEL ... x
BAB I PENDAHULUAN ... 1
1.1 Latar Belakang ... 1
1.2 Rumusan Masalah ... 2
1.3 Maksud dan Tujuan ... 2
1.4 Batasan Masalah... 2
1.5 Metode Penelitian... 3
1.6 Sistematika Penulisan ... 3
BAB II LANDASAN TEORI ... 5
2.1 Konsep Dasar Posyandu ... 5
2.1.1 Pengertian Posyandu ... 5
2.1.2 Sejarah Posyandu ... 5
2.1.3 Tujuan Penyelenggaraan Posyandu ... 5
vii
2.2 Perangkat Keras ... 6
2.2.1 Arduino Uno ... 6
2.2.1.1 Catu Daya ... 8
2.2.1.2 Memory ... 8
2.2.1.3 Input dan Output ... 9
2.2.1.4 Komunikasi ... 10
2.2.1.5 Programming ... 10
2.2.1.6 Perangkat Lunak (Arduino Sketch) ... 10
2.2.2 Sensor Flexiforce ... 12
2.2.3 Sensor Ultrasonik HY-SRF05 ... 12
2.2.4 LCD 20x4 ... 14
2.2.5 Tri-State Buffer ... 15
BAB III PERANCANGAN SISTEM ... 18
3.1 Perancangan Secara Umum... 18
3.1.1 Diagram blok sistem ... 18
3.1.2 Penjelasan Diagram Blok Sistem ... 18
3.1.3 Prinsip Kerja Alat ... 19
3.2 Perancangan Perangkat Keras ... 19
3.2.1 Perancangan Timbangan Bayi ... 20
3.2.2 Sensor Flexiforce ... 21
viii
3.3 Perancangan Perangkat Lunak ... 24
3.3.1 Flowchart program ... 25
3.3.2 Teknik Switching ... 26
3.4 ADC ... 27
BAB IV HASIL PENGUJIAN ... 29
4.1 Pengujian Berat ... 29
4.2 Pengujian tinggi dan panjang ... 36
BAB V KESIMPULAN DAN SARAN ... 38
5.1 Kesimpulan ... 38
5.2 Saran ... 38
39 [1] Anonim, (n.d.), Flexiforce User Manual,
https://www.tekscan.com/products-solutions/force-sensors/a201, diakses 14 Maret 2015
[2] Effendy, Nasrul, (2008), Perawatan Kesehatan Masyarakat, EGC, Jakarta. [3] Harahap, Ahmad Nawawi, 2011, Sistem Pengontrolan Level Ketinggian Air
Secara Otomatis Menggunakan Mikrokontroler ATMega8535 Dengan Sensor Ultrasonik, Fisika Instrumentasi, Universitas Sumatera Utara
(http://repository.usu.ac.id/bitstream/123456789/27166/3/Chapter%20III-V.pdf diakses 15 April 2015)
[4] Miptahudin, Apip, 2010, Timbangan Balita Digital Berbasis Mikrokontroler At89s51, Teknik Komputer, Universitas Komputer Indonesia.
(http://elib.unikom.ac.id diakses 20 Februari 2015)
[5] Pratama, Hadijaya, 2012, Akuisisi Data Kinerja Sensor Ultrasonik Berbasis Sistem Komunikasi Serial Menggunakan Mikrokontroler Atmega 32, Teknik Elektro, Universitas Pendidikan Indonesia.
(http://jurnal.upi.edu/file/05_HADIJAYA_PRATAMA_hal._36-43_.pdf diakses 15 April 2015)
[6] Suyono, Haryono dan Haryanto, Rohadi, (2009), Buku Pedoman Pembentukan dan Pengembangan Pos Pemberdayaan Keluarga, Balai Pustaka, Jakarta. [7] Syahrul, 2012, Mikrokontroler AVR ATMEGA 8535, Informatika, Bandung. [8] Thomas, Johan, K.W., Henry, 2008, Sistem Pengukur Berat Dan Tinggi Badan
POSYANDU (HARDWARE)
TUGAS AKHIR
Disusun Untuk Memenuhi Kelulusan Pada
Program Studi Diploma Tiga Teknik Komputer di Jurusan Teknik Komputer
Oleh Tyto Mulyono
108 12 003
Pembimbing
Ir. Syahrul, M.T.
JURUSAN TEKNIK KOMPUTER
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
BANDUNG
iv
Segala puji bagi Allah SWT., Pencipta dan Pemelihara alam semesta, shalawat serta salam semoga terlimpah bagi Muhammad SAW., keluarga dan para pengikutnya yang setia hingga akhir masa.
Atas rahmat Allah SWT., akhirnya Penulis dapat menyelesaikan tugas akhir
ini tepat pada waktunya dengan judul “Instrumen Evaluator Status Gizi Balita pada
Posyandu (Hardware)” yang merupakan salah satu syarat meraih gelar Diploma Tiga Jurusan Teknik Komputer Fakultas Teknik dan Ilmu Komputer Universitas Komputer Indonesia. Tugas akhir ini sesungguhnya bukanlah sebuah kerja individual dan akan sulit terlaksana tanpa bantuan banyak pihak yang tak mungkin Penulis sebutkan satu persatu, namun dengan segala kerendahan hati, Penulis mengucapkan terima kasih kepada :
1. Ayah dan Ibu yang selalu mendoakan, memberikan dorongan serta bantuan baik secara moril maupun materil tanpa ada batasan.
2. Bapak Dr. Wendi Zarman, M.Si selaku Ketua Jurusan Teknik Komputer di Universitas Komputer Indonesia.
3. Bapak Agus Mulyana, M.T selaku Dosen Wali atas segala dukungannya baik akademik maupun non akademik.
4. Bapak Ir. Syahrul, M.T selaku dosen pembimbing yang telah membimbing dalam pengerjaan tugas askhir ini.
5. Bapak dan Ibu dosen di jurusan Teknik Komputer Universitas Komputer Indonesia, yang telah banyak memberikan ilmu serta motivasi dan bimbingannya, baik secara akademik maupun non akademik.
6. Ibrahim Ahmad selaku tim dalam pengerjaan tugas akhir ini pada bagian
software.
7. Teman-teman kampus khususnya program studi Teknik Komputer kelas 12 TK 6 yang selalu memberikan motivasi untuk pengerjaan tugas akhir ini. 8. Semua pihak yang tidak bisa penulis sebutkan satu persatu, terima kasih atas
v
Akhir ini bermanfaat khususnya bagi penulis dan bagi para pembaca.
i
INSTRUMEN EVALUATOR STATUS GIZI BALITA PADA
POSYANDU (HARDWARE)
Oleh Tyto Mulyono
(10812003)
Telah disetujui dan disahkan di Bandung sebagai Tugas Akhir pada tanggal : Bandung, 03 Agustus 2015
Menyetujui, Pembimbing,
Ir. Syahrul, M.T. NIP: 4127.70.05.016
Mengetahui,
Dekan Fakultas Teknik dan Ilmu Ketua Jurusan Teknik Komputer Komputer
ii Yang bertanda tangan dibawah ini:
Nama : Tyto Mulyono NIM : 10812003
Menyatakan bahwa Tugas Akhir ini adalah hasil karya sendiri dan bukan merupakan duplikasi sebagian atau seluruhnya dari hasil karya orang lain yang pernah dipublikasikan atau yang sudah pernah dipakai untuk mendapatkan gelar di Universitas lain, kecuali pada bagian dimana sumber informasi dicantumkan dengan cara referensi yang semestinya.
Pernyataan ini dibuat dengan sebenar-benarnya secara sadar dan bertanggung jawab dan saya bersedia menerima sanksi berupa pembatalan Tugas Akhir saya apabila terbukti melakukan duplikasi terhadap Tugas Akhir yang sudah ada.
Bandung, 03 Agustus 2015