Ermanu A. H MK Sistem Kontrol - TE UMM 1
DESAIN KOMPENSATOR
Jika konfigurasi
pole-zero
dari
plant
sedemikian hingga
spesifikasi sistem tidak dapat cocok dengan mengatur
faktor
penguatan
lup
terbuka
(K) sebagaimana
perancangan
dengan
TKA bab
terdahulu, maka
kompensator bertingkat
dapat ditambahkan ke sistem
untuk mengkompensasi beberapa atau semua pole dan
zero plant
Gp(s)
H( s)
-R( s) E( s) C( s)
Gc( s)
Ermanu A. H MK Sistem Kontrol - TE UMM 2
Kompensator Mendahului Fasa
Fungsi alih kompensator fasa-mendahului adalah
G s
s
a
s
b
a
b
c
( )
=
+
+
0
≤ <
x
θa
θb
-b -a
s1 jω
σ
Kontribusi sudut :
0
)
(
=
−
>
∠
G
cs
θ
aθ
bKegunaan : memperbaiki performans transien
Ermanu A. H MK Sistem Kontrol - TE UMM 3
Contoh :
Tentukan kompensasi yang diperlukan untuk sebuah sistem dengan fungsi alih plant
) 2 )( 1 (
10 ) (
+ + =
s s s s Gp
Agar sistem ini memenuhi kekhususan berikut (a) lewatan maksimum < 15%, (b) waktu naik 4 det (c) Kv>6
Untuk memenuhi spesifikasi lewatan maksimum < 15%, maka menggunakan instruksi MATLAB :
>> mp=0.15;
>> zeta=sqrt(log(mp)^2/(pi^2+log(mp)^2)); >> zeta
zeta = 0.5169
Penyelesaian :
Ermanu A. H MK Sistem Kontrol - TE UMM 4
Contoh :
Tentukan kompensasi yang diperlukan untuk sebuah sistem dengan fungsi alih plant
) 2 )( 1 (
10 ) (
+ + =
s s s s Gp
Agar sistem ini memenuhi kekhususan berikut (a) lewatan maksimum = 15%, (b) Kv>10
Untuk memenuhi spesifikasi lewatan maksimum = 15%, maka menggunakan instruksi MATLAB :
>> mp=0.15;
>> zeta=sqrt(log(mp)^2/(pi^2+log(mp)^2)); >> zeta
Ermanu A. H MK Sistem Kontrol - TE UMM 5 Jadi untuk memenuhi Mp < 15%, makaζ> 0,5169. Misalkan
dipilihrasio redamanζ= 0,707 makaωnditentukan sbb :
>> zeta=0.707; >> tr=4;
>> wn=(pi-atan(sqrt(1-zeta^2)/zeta))/(tr*sqrt(1-zeta^2))
wn =
0.8329
Titik yang memenuhi spesifikasi ini adalah
2 1
ζ
ω
ζω
+ −−
= n j n
s
Yaitu :
>>s1=-zeta*wn+wn*sqrt(1-zeta^2)*i
s1 =
-0.5888 + 0.5890i
[image:2.612.282.529.94.276.2]Ermanu A. H MK Sistem Kontrol - TE UMM 6
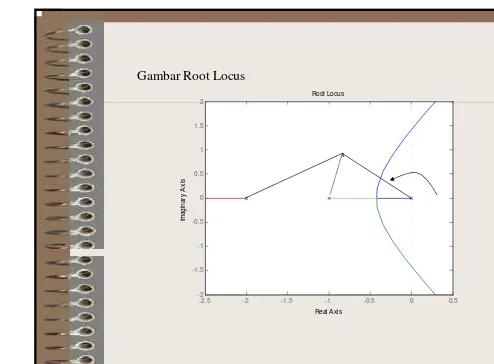
Gambar Root Locus
-2.5 -2 -1.5 -1 -0.5 0 0.5
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
Root Locus
Real Axis
Im
agi
nar
y
A
x
is
x
Ermanu A. H MK Sistem Kontrol - TE UMM 7
>> tetha1=180-atan(imag(s1)/abs(real(s1)))*180/pi
tetha1 =134.9913
>> tetha2=atan(imag(s1)/(1-abs(real(s1))))*180/pi
tetha2 =55.0855
Ermanu A. H MK Sistem Kontrol - TE UMM 8
• >>
tetha3=atan(imag(s1)/(2-abs(real(s1))))*180/pi
• tetha3 =