TUGAS AKHIR
SIMULASI PENGATURAN KECEPATAN MOTOR INDUKSI
TIGA PHASA DENGAN DIRECT TORQUE CONTROL DENGAN
MENGGUNAKAN MATLAB 7.0.1
Diajukan untuk memenuhi salah satu persyaratan dalam
menyelesaikan pendididkan sarjana (S-1) pada Departemen Teknik Elektro
Oleh
NAMA : JEREMIA PURBA NIM : 0 4 0 4 0 2 0 4 6
DEPARTEMEN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
SIMULASI PENGATURAN KECEPATAN MOTOR INDUKSI TIGA PHASA DENGAN DIRECT TORQUE CONTROL DENGAN MENGGUNAKAN
MATLAB 7.0.1
oleh :
JEREMIA S. PURBA NIM : 04 0402 046
Tugas Akhir ini diajukan untuk melengkapi salah satu syarat untuk memperoleh gelar sarjana Teknik Elektro
Disetujui oleh : DOSEN PEMBIMBING
Ir. EDDY WARMAN NIP : 130 809 911
Diketahui oleh :
KETUA DEPARTEMEN TEKNIK ELEKTRO
Ir. NASRUL ABDI, MT NIP : 131 459 554
DEPARTEMEN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
KATA PENGANTAR
Penulis bersyukur kepada Tuhan atas segala tuntunan dan pengajaran yang diberikan-Nya dalam penyelesaian Tugas Akhir ini. Penulisan Tugas Akhir ini bertujuan memenuhi syarat kurikulum Departemen Teknik Elektro, Fakultas Teknik, Universitas Sumatera Utara dalam menyelesaikan program studi strata satu (S1). Adapun judul Tugas Akhir ini adalah: “Simulasi Pengaturan Kecepatan Motor Induksi Tiga Phasa dengan Direct Torque Control dengan Menggunakan Matlab 7.0.1”.
Selama penulisan Tugas Akhir ini, penulis mendapatkan banyak bantuan baik berupa bimbingan dan kritikan sehingga dengan rasa syukur, penulis mengucapkan terima kasih kepada:
1. Bapak Ir. Eddy Warman, selaku dosen pembimbing Tugas Akhir ini.
2. Bapak Ir. Syarifuddin Siregar, selaku dosen wali penulis yang telah membantu dari awal perkuliahan sampai penyelesaian Tugas Akhir ini. 3. Bapak Ir. Nasrul Abdi, MT, selaku Ketua Departemen Teknik Elektro. 4. Bapak Rahmad Fauzi, ST. MT, selaku Sekretaris Departemen Teknik
Elektro.
5. Ayah dan Ibu Tercinta yang mengasihi saya, yang telah memberikan semua kemampuan mereka dalam menyediakan segala kebutuhan saya selama perkuliahan.
6. Seluruh teman-teman Departemen Teknik Elektro stambuk 2004 serta seluruh saudara-saudariku yang namanya tidak dapat saya sebutkan satu persatu, atas bantuan yang diberikan kepada saya.
Akhirnya penulis menyadari masih banyak kekurangan dalam penulisan Tugas Akhir ini. Oleh karena itu penulis sangat mengharapkan saran yang membangun demi penyempurnaan Tugas Akhir ini. Kiranya Tugas Akhir ini berguna bagi pembaca terutama yang ingin mendalami pengontrolan pada motor induksi tiga phasa.
Terima kasih.
Medan, Januari 2008
ABSTRAK
Motor induksi banyak dipergunakan dalam industri saat ini karena dalam penggunaannya motor induksi dapat dioperasikan dengan kecepatan yang bervariasi. Pengaturan kecepatan putaran motor induksi dapat dilakukan dengan beberapa metode dan salah satu metode yang digunakan adalah dengan mengatur torsi secara langsung.
Direct Torque Control (DTC) merupakan teknologi terbaru yang dapat mengatur fluks dan torsi motor induksi secara langsung dengan mengatur vektor tegangannya. Pengaturan vektor ini menggunakan pengendalian umpan balik torsi dan fluks stator . Fluks dan torsi ini dihitung dari tegangan dan arus stator yang diukur pada motor. Metode ini menggunakan model referensi stator (stator reference frames) motor induksi
DAFTAR ISI
Kata Pengantar ... i
Abstrak... iii
Daftar Isi ... iv
Daftar Gambar ... vii
Daftar Tabel ... ix
BAB I : PENDAHULUAN 1.1 Latar Belakang ... 1
1.2 Rumusan Masalah... 2
1.3 Tujuan Penulisan... 2
1.4 Batasan Masalah ... 3
1.5 Metodologi Penulisan ... 3
1.6 Sistematika Penulisan ... 3
BAB II: MOTOR INDUKSI 2.1 Umum ... 5
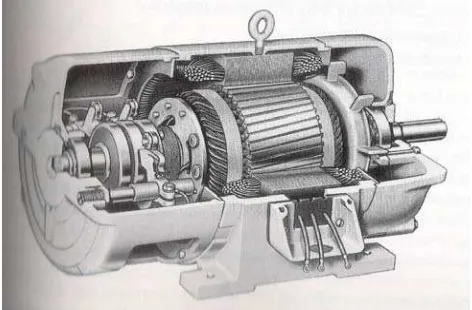
2.2 Konstruksi Motor Induksi ... 5
2.2.1 Stator ... 6
2.2.1 Rotor ... 7
2.3 Medan Putar ... 9
2.4 Prinsip Kerja Motor Induksi Tiga Phasa... 12
2.5 Rangkaian Ekivalen Motor Induksi ... 14
2.6 Pengaturan Putaran Motor Induksi ... 18
2.7.1 Aliran Daya Pada Motor Induksi ... 19
2.7.2 Perhitungan Torsi Pada Motor Induksi tiga Phasa... 21
2.8 Model Dinamik Motor Induksi ... 23
2.8.1 Model Motor Induksi Dua Phasa ... 23
2.8.2 Transformasi untuk Memperoleh Matriks Yang Konstan ... 26
2.8.3 Transformasi Tiga Phasa ke Dua Phasa... 30
BAB III : PENGONTROLAN TORSI SECARA LANGSUNG (DIRECT TORQUE CONTROL) 3.1 Umum ...34
3.2 Pengontrolan Vektor Pada Motor Induksi...35
3.3 Kondisi Switching dan Vektor Tegangan Output Inverter………….37
3.4 Pengontrolan Fluks. ...42
3.5 Pengontrolan Torsi ………44
BAB IV : SIMULASI PENGATURAN KECEPATAN MOTOR INDUKSI TIGA PHASA DENGAN DIRECT TORQUE CONTROL DAN PEMBAHASANNYA 4.1 Umum ………49
4.2 Rangkaian Simulasi ………...49
4.3 Spesifikasi Komponen Simulasi ………...50
BAB V : PENUTUP
5.1 Kesimpulan ………60 5.1 Saran ...60
DAFTAR GAMBAR
Gambar 2.1 Konstruksi motor induksi rotor belitan ... 6
Gambar 2.2 Stator ... 6
Gambar 2.3 Rotor Sangkar ... 7
Gambar 2.4 Rotor Belitan ... 8
Gambar 2.5 Arus tiga phasa seimbang ... 9
Gambar 2.6 Diagram phasor fluksi tiga phasa seimbang ... 9
Gambar 2.7 Medan putar pada motor induksi tiga fasa ... 10
Gambar 2.8 Rangkaian pengganti motor induksi ... 14
Gambar 2.9 Rangkaian ekivalen stator ... 15
Gambar 2.10 Rangkaian ekivalen rotor ... 17
Gambar 2.11 Rangkaian ekivalen motor induksi sisi stator ... 18
Gambar 2.12 Rangkaian ekivalen per-phasa motor induksi tiga phasa .. 19
Gambar 2.13 Diagram aliran daya pada motor induksi tiga phasa ... 20
Gambar 2.14 Rangkaian ekivalen Thevenin per phasa motor induksi tiga phasa ... 22
Gambar 2.15 Kumparan stator dan rotor motor induksi dua-phasa... 24
Gambar 2.16 Transformasi variabel rotor dari nilai aktual ke nilai khayalan ... 27
Gambar 2.17 Kumparan stator motor dua phasa dan tiga phasa ... 30
Gambar 3.1 Skema DTC... 35
Gambar 3.2 Rangkaian daya penggerak motor induksi tiga phasa... 37
Gambar 3.3 Bentuk gelombang tegangan keluaran Dioda ... 38
Gambar 3.5 Tegangan output inverter untuk setiap switching ... 41
Gambar 3.6 Pembagian fluks linkages stator dalam 6 ruang... 43
Gambar 3.7 Pengaruh switching VI dan VVI pada phasor fluks stator.. 44
Gambar 3.8 Blok diagram pengontrolan motor induksi dengan direct torque control... 47
Gambar 4.1 Rangkaian simulasi pengaturan kecepatan motor induksi tiga phasa dengan direct torque control... 50
Gambar 4.2 Sumber tiga phasa ... 50
Gambar 4.3 Blok Parameter sumber tiga phasa... 51
Gambar 4.4 DTC Induction Motor Drive... 51
Gambar 4.5 Blok Parameter asynchronous machine... 52
Gambar 4.6 Blok parameter converter and DC bus... 53
Gambar 4.7 Blok parameter controller... 54
Gambar 4.8 Demux... 55
Gambar 4.9 Scope... 55
Gambar 4.10 Grafik hasil simulasi untuk kondisi tanpa torsi beban ... 56
Gambar 4.11 Grafik hasil simulasi untuk kondisi dengan torsi beban sebesar 300 Nm... 57
DAFTAR TABEL
Tabel 3.1 Kondisi switching inverter phasa a ... 39
Tabel 3.2 Kondisi switching inverter ... 40
Tabel 3.3 Tegangan keluaran inverter... 41
Tabel 3.4 Sambungan tabel tegangan keluaran inverter ... 42
Tabel 3.5 Logic pegontrolan fluks ... 43
Tabel 3.6 Logic pengontrolan torsi ... 44
Tabel 3.7 Kondisi switching untuk berbagai kondisi Sλ,STdan Sθ 45 Tabel 3.8 Logic fluks phasor ... 47
Tabel 4.1 Respon Kecepatan dengan kecepatan Aktual 600 rpm .... 59
BAB I PENDAHULUAN
1.1 LATAR BELAKANG
Pada era saat ini, kebutuhan akan alat produksi yang tepat sangat diperlukan agar dapat meningkatkan efisiensi waktu dan biaya. Sebagian besar dari peralatan industri menggunakan tenaga listrik sebagai penggerak utama, yaitu motor listrik. Pemilihan motor listrik untuk industri merupakan salah satu hal penting yang harus dipertimbangkan.
Pada awalnya yang paling banyak digunakan dalam aplikasi mesin listrik yang membutuhkan pengaturan kecepatan dan torsi dengan kehandalan yang tinggi adalah motor DC karena fluks dan torsinya dapat dengan mudah diatur, yaitu dengan mengubah arus jangkar atau arus medannya. Kekurangan motor ini adalah membutuhkan perawatan yang rutin karena memiliki brush dan komutator, disamping itu harganya relatif lebih mahal dibandingkan motor induksi. Motor induksi merupakan motor yang paling menguntungkan dibandingkan dengan motor yang lain. Salah satu keuntungan utamanya adalah motor induksi tidak membutuhkan hubungan elektrik antara stator dengan rotor motor. Oleh karena itu motor induksi tidak membutuhkan brush dan komutator, sehingga tidak membutuhkan perawatan yang rutin. Motor induksi memiliki harga yang lebih murah, lebih ringan, padat dan kokoh serta memiliki efisiensi yang tinggi. Tetapi dalam hal pengaturan kecepatan dan torsi motor induksi bukanlah suatu permasalahan yang mudah untuk dilakukan.
motor induksi ini didasari atas keinginan untuk menandingi bahkan melebihi kehandalan penggerak motor DC, seperti respon torsi yang cepat, dan ketelitian pengaturan kecepatan, disamping itu juga memanfaatkan keunggulan motor induksi. Generasi pertama penggerak motor induksi ini menggunakan pulse width modulation untuk memberikan frekuensi arus sinusoidal yang dapat diubah kepada stator motor induksi. Tetapi dengan cara ini tidak mampu mengatur torsi secara langsung. Dengan kemajuan teknologi elektronika daya maka pengaturan motor induksi dengan Direct Torque Control (DTC) ini telah memungkinkan untuk membuat motor induksi yang berfungsi sebagai sumber torsi dengan pengaturan torsi secara langsung (direct torque control).
1.2 RUMUSAN MASALAH
Dari latar belakang diatas, maka dapat dirumuskan beberapa permasalahan antara lain :
1. Bagaimana cara pengaturan kecepatan putaran motor induksi.
2. Apa pengaruh perubahan torsi terhadap kecepatan putaran motor induksi. 3. Bagaimana keandalan pengaturan torsi secara langsung pada motor induksi.
1.3 TUJUAN PENULISAN
Adapun tujuan penulisan tugas akhir ini adalah
1. Untuk memberikan penjelasan pengaturan torsi secara langsung (direct torque control).
1.4 BATASAN MASALAH
Untuk menjaga agar pembahasan materi dalam tugas akhir ini lebih terarah, penulis menetapkan suatu batasan masalah sebagai berikut:
1. Tidak membahas pengaruh direct torque control (DTC) pada saat starting motor induksi.
2. Tidak membahas bagaimana pengontrolan torsi pada motor DC.
3. Tidak membahas secara rinci peralatan elektronika daya yang digunakan. 4. Tidak membahas pengaruh harmonisa terhadap motor induksi tiga phasa.
1.5 METODOLOGI PENULISAN
Metode yang digunakan dalam penulisan tugas akhir ini adalah sebagai berikut: 1. Studi literature : mengambil bahan dari buku-buku referensi, jurnal,
majalah dan sebagainya.
2. Studi bimbingan : Diskusi, berupa tanya jawab dengan dosen pembimbing yang telah ditunjuk oleh pihak Departemen Teknik Elektro USU, mengenai masalah-masalah yang timbul selama penulisan Tugas Akhir ini berlangsung
3. Percobaan dan pengamatan melalui simulasi Matlab.
1.6 SISTEMATIKA PENULISAN
BAB I: PENDAHULUAN
Bab ini menguraikan latar belakang penulisan, rumusan masalah, tujuan penulisan, batasan masalah, metode penulisan, sistematika penulisan.
BAB II: MOTOR INDUKSI TIGA PHASA
Bab ini menjelaskan konstruksi, teori medan putar, prinsip kerja, rangkaian ekivalen dan model dinamik motor induksi.
BAB III: PENGONTROLAN TORSI SECARA LANGSUNG (DIRECT TORQUE CONTROL) DENGAN INVERTER
Dalam bab ini dijelaskan prinsip terjadinya vektor tegangan inverter, flux yang terjadi serta torsi yang dikontrol secara langsung oleh switching inverter.
BABIV: SIMULASI PENGATURAN KECEPATAN MOTOR INDUKSI DENGAN DIRECT TORQUE CONTROL SERTA PEMBAHASANNYA
Bab ini menguraikan rangkaian simulasi, spesifikasi komponen simulasi, prosedur simulasi, hasil simulasi, data hasil simulasi, dan analisa hasil simulasi pengontrolan dengan direct torque control. BAB V : PENUTUP
Dalam bab ini dituliskan hal-hal yang dianggap penting di dalam penulisan yang dirangkumkan sebagai kesimpulan dan saran.
BAB II MOTOR INDUKSI
2.1 Umum
Motor listrik yang paling umum dipergunakan dalam perindustrian industri adalah motor induksi. Berdasarkan phasa sumber daya yang digunakan, motor induksi dapat diklasifikasikan menjadi motor satu phasa dan motor phasa banyak. Karena sistem distribusi umumnya adalah tiga phasa, maka motor phasa banyak biasanya adalah tipe tiga phasa. Motor induksi tiga phasa banyak digunakan di dalam berbagai bidang industri, sedangkan motor induksi satu phasa banyak digunakan pada peralatan rumah tangga karena motor induksi satu phasa mempunyai daya keluaran yang rendah. Adapun beberapa keuntungan motor induksi dibandingkan motor lain adalah konstruksinya yang sederhana tetapi padat dan kuat, ukurannya lebih kecil dan lebih ringan sehingga harganya lebih murah, perawatan yang mudah, dan memiliki efisiensi yang tinggi. Tetapi dalam hal pengaturan kecepatan dan pengontrolan torsi lebih sulit dilakukan dibandingkan motor dc. Tetapi seiring perkembangan teknologi dalam bidang elektronika daya, telah memungkinkan untuk menandingi motor dc dalam hal pengaturan kecepatan dan pengontrolan torsi.
2.2 Konstruksi Motor Induksi
Gambar 2.1 Konstruksi motor induksi rotor belitan
2.2.1 Stator
Stator motor induksi pada prinsipnya sama dengan stator motor sinkron. Stator tersebut terbuat dari sejumlah stamping (kaki) yang membentuk slot, tempat dari belitan-belitannya. Belitan pada stator adalah belitan tiga phasa yang dihubungkan dengan sumber tiga phasa. Belitannya dibelitkan untuk sejumlah kutub tertentu, dimana jumlah pastinya ditentukan dari kecepatan yang dibutuhkan. Semakin besar jumlah kutub, kecepatan putarnya semakin berkurang dan sebaliknya.
Jika belitan stator disuplai dengan tegangan tiga phasa maka akan mengalir arus tiga phasa yang akan menghasilkan fluks magnetik berputar dengan besaran yang konstan, fluks magnetik yang berputar ini akan menginduksikan ggl pada rotor. Konstruksi stator motor induksi ditunjukkan pada Gambar 2.2.
2.2.2 Rotor
Ada dua jenis kumparan rotor, yaitu jenis rotor sangkar (squirel-cage rotor) dan rotor belitan (wound rotor). Kedua rotor ini bekerja pada prinsip yang sama dan mempunyai konstruksi stator yang sama, hanya berbeda dalam konstruksinya saja.
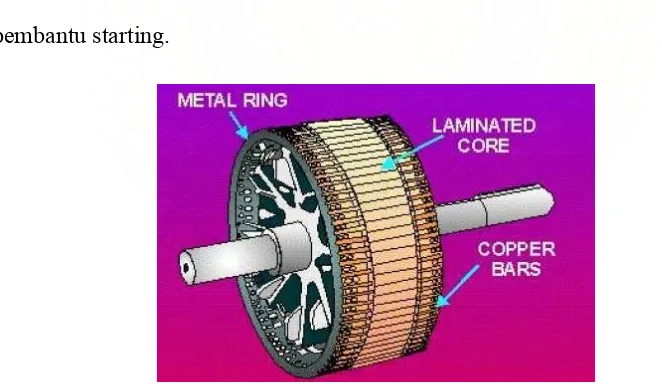
a. Rotor Sangkar (Squirrel Cage Rotor)
Hampir 90% dari motor induksi adalah jenis rotor sangkar, karena jenis ini mempunyai konstruksi yang sangat sederhana dan kuat. Rotor ini seperti pada Gambar 2.3, terdiri dari laminasi silindris inti dengan slot-slot yang paralel sebagai tempat dari konduktornya, dan konduktor-konduktor ini terbuat dari batangan tembaga atau aluminium alloy. Konduktornya tidak terisolasi dari inti, karena arus rotor secara alamiah akan mengalir melalui tahanan yang paling kecil, yaitu konduktor rotor. Pada setiap ujung konduktor rotor, semuanya dihubungsingkatkan dengan cincin ujung sehingga tidak mungkin menambahkan tahanan luar sebagai pembantu starting.
Gambar 2.3 Rotor sangkar
selalu ditempatkan paralel terhadap poros motor tetapi kerapkali dimiringkan. Hal ini akan menghasilkan torsi yang lebih seragam dan juga mengurangi derau dengung magnetik sewaktu motor sedang berputar.
b. Rotor Belitan (Wound Rotor)
Motor rotor belitan atau motor cincin slip berbeda dengan motor sangkar dalam hal konstruksi rotornya. Rotor ini memiliki belitan tiga phasa dengan jumlah kutub yang sama dengan stator. Belitan rotor ini juga diberikan tambahan resistansi luar yang terhubung melalui slip-ring. Seperti namanya, rotor dililit dengan lilitan terisolasi serupa dengan lilitan stator. Lilitan phasa rotor dihubungkan secara dan masing-masing phasa ujung terbuka yang dikeluarkan ke cincin slip yang terpasang pada poros rotor.
Motor rotor belitan kurang banyak digunakan dibandingkan dengan motor sangkar tupai karena harganya yang mahal dan biaya pemeliharaannya yang lebih besar. Rotor ini dapat dilihat pada Gambar 2.4.
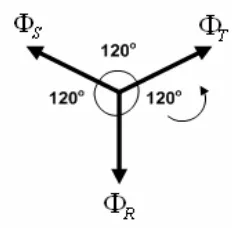
2.3 Medan Putar
Ketika belitan tiga phasa dari motor induksi diberi suplai maka medan magnet yang berputar akan dihasilkan. Medan magnet ini dibentuk oleh kutub- kutubnya yang berada pada posisi yang tidak tetap pada stator tetapi berubah-ubah mengelilingi stator. Adapun magnitudo dari medan putar ini selalu tetap yaitu sebesar 1.5 m dimana m adalah fluks yang disebabkan suatu phasa.
Untuk melihat bagaimana medan putar dibangkitkan, maka dapat diambil contoh pada motor induksi tiga phasa dengan jumlah kutub dua. Dimana ke-tiga phasanya R, S, T disuplai dengan sumber tegangan tiga phasa, dan arus pada phasa ini ditunjukkan sebagai IR, IS, dan IT, maka fluks yang dihasilkan oleh arus-arus ini adalah:
R = m sin t ...( 2.1a ) S = m sin ( t – 120o)...( 2.1b ) T = m sin ( t – 240o)...( 2.1c )
Gambar 2.5 Arus tiga phasa seimbang
i ii
iii iv
2.7 Medan putar pada motor induksi tiga phasa
(i) Pada keadaan 1 ( Gambar 2.5 ), t = 0 ; arus dalam phasa R bernilai nol sedangkan besarnya arus pada phasa S dan phasa T memiliki nilai yang sama dan arahnya berlawanan. Dalam keadaan seperti ini arus sedang mengalir ke luar dari konduktor sebelah atas dan memasuki konduktor sebelah bawah. Sementara resultan fluks yang dihasilkan memiliki besar yang konstan yaitu sebesar 1,5 m
dan dibuktikan sebagai berikut :
R = 0 ; S = m sin ( -120o ) =
2 3
− m ;
T = m sin ( -240o ) =
2 3
m
Oleh karena itu resultan fluks, r adalah jumlah phasor dari T dan – S
Sehinngga resultan fluks, r = 2 x
2 3
(ii) Pada keadaan 2, arus bernilai maksimum negatif pada phasa S, sedangkan pada phasa R dan phasa T bernilai 0,5 maksimum, dan pada saat ini t = 30o, oleh karena itu fluks yang diberikan oleh masing-masing phasa :
R = m sin ( 30o ) = 0,5 m
S = m sin ( -90o ) = - m
T = m sin (-210o) = 0,5 m
Maka jumlah phasor R dan - T adalah = r’ = 2 x 0,5 m cos 60 = 0,5 m.
Sehingga resultan fluks r = 0,5 m + m = 1,5 m.
Dari gambar diagram phasor tersebut dapat dilihat bahwa resultan fluks berpindah sejauh 30o dari posisi pertama.
(iii) Pada keadaan ini t = 60o, arus pada phasa R dan phasa S memiliki besar yang sama dan arahnya berlawanan ( 0,866 m ), oleh karena itu fluks yang diberikan
oleh masing-masing phasa :
R = m sin ( 60o ) =
2 3
m
S = m sin ( -60o ) =
2 3
− m
T = m sin ( -180o ) = 0
Maka magnitudo dari fluks resultan : r = 2 x
2 3
m cos 30o = 1,5 m
( iv ) Pada keadaan ini t = 90o, arus pada phasa R maksimum ( positif), dan arus pada phasa S dan phasa T = 0,5 m , oleh karena itu fluks yang diberikan oleh
masing-masing phasa:
R = m sin ( 90o ) = m
S = m sin ( -30o ) = - 0,5 m
T = m sin (-150o) = - 0,5 m
Maka jumlah phasor - T dan – S adalah = r’ = 2 x 0,5 m cos 60 = 0,5 m.
Sehingga resultan fluks r = 0,5 m + m = 1,5 m.
Dari gambar diagram phasor tersebut dapat dilihat bahwa resultan fluks berpindah sejauh 90o dari posisi pertama.
2.4 Prinsip Kerja Motor Induksi Tiga Phasa
Prinsip kerja motor induksi tiga phasa dapat dijelaskan sebagai berikut :
Jika pada belitan stator diberi tegangan tiga phasa, maka pada stator akan dihasilkan arus tiga phasa. Arus ini akan mengalir melalui belitan yang akan menimbulkan fluks dan karena adanya perbedaan sudut phasa sebesar 1200 antara ketiga phasanya, maka akan timbul medan putar dengan kecepatan sinkron ns.
p f
ns =120× ( rpm ) ... (2.2)
Dalam stator sendiri akan timbul tegangan pada masing-masing phasa yang dinyatakan E1 =4,44fN1Φ ( Volt ) ... (2.3)
E2 =4,44fN2Φm ( Volt ) ... (2.4) dimana :
E2 = Tegangan induksi pada rotor saat rotor dalam keadaan diam (Volt) N2 = Jumlah lilitan kumparan rotor
m = Fluks maksimum(Wb)
Karena kumparan rotor membentuk rangkaian tertutup, maka ggl tersebut akan menghasilkan arus I2. Adanya arus I2 di dalam kumparan rotor akan menghasilkan
medan magnet rotor. Interaksi medan magnet rotor dengan medan putar stator akan menimbulkan gaya F pada rotor. Bila kopel mula yang dihasilkan oleh gaya F cukup besar untuk memikul kopel beban, rotor akan berputar searah medan putar stator. Perputaran rotor akan semakin meningkat hingga mendekati kecepatan sinkron. Perbedaan kecepatan sinkron medan putar stator (ns) dan kecepatan rotor (nr) disebut
slip, dinyatakan dengan:
100%
s r
s − ×
=
n n n
s ... (2.5)
Pada saat rotor dalam keadan berputar, besarnya tagangan yang terinduksi pada kumparan rotor akan bervariasi tergantung besarnya slip, dan tegangan induksi ini dinyatakan dengan E2s.
E2s =4,44sfN2Φm ( Volt ) ... (2.6) dimana :
E2s = tegangan induksi pada rotor dalam keadaan berputar (Volt) f2 = s. f = frekuensi rotor (frekuensi tegangan induksi pada rotor dalam
keadaan berputar)
Bila ns = nr, tegangan tidak akan terinduksi dan arus tidak akan mengalir pada
2.5 Rangkaian Ekivalen Motor Induksi
Kerja motor induksi seperti juga kerja transformator adalah berdasarkan prinsip induksi-elektromagnetik. Oleh karena itu, motor induksi dapat dianggap sebagai transformator dengan rangkaian sekunder yang berputar. Rangakian pengganti motor induksi dapat dilihat pada gambar 2.8.
Gambar 2.8 Rangkaian pengganti motor induksi
Untuk menentukan rangkaian ekivalen dari motor induksi tiga phasa, pertama- tama perhatikan keadaan pada stator. Gelombang fluks pada celah udara yang berputar sinkron membangkitkan ggl lawan tiga phasa yang seimbang di dalam phasa-phasa stator. Besarnya tegangan terminal stator berbeda dengan ggl lawan sebesar jatuh tegangan pada impedansi bocor stator, sehingga dapat dinyatakan dengan persamaan
1
V = E1 + I1( R1+ jX1 ) Volt ……….(2.7) Di mana: V1 = tegangan terminal stator (Volt)
1
E = ggl lawan yang dihasilkan oleh fluks celah udara resultan(Volt)
1
I = arus stator (Ampere)
1
R = resistansi efektif stator (Ohm)
1
X = reaktansi bocor stator (Ohm)
Seperti halnya transformator, arus stator dapat dipecah menjadi dua komponen, komponen beban dan komponen peneralan. Komponen beban I2 menghasilkan suatu
1 V
1 R
1 X
1 I
c
R Xm
Φ
I
c
I Im
2 I
1 E
2 sX 2
I
2 R 2
fluks yang akan melawan fluks yang diakibatkan arus rotor. Komponen peneralan IΦ , merupakan arus stator tambahan yang diperlukan untuk menghasilkan fluks celah udara resultan. Arus peneralan dapat dipecah menjadi komponen rugi-rugi inti IC yang
sephasa dengan E1 dan komponen magnetisasi Im yang tertinggal dari E1 sebesar
°
90 . Sehingga dapat dibuat rangkaian ekivalen pada stator, seperti Gambar 2.9.
Gambar 2.9 Rangkaian ekivalen stator
Pada rotor belitan, jika belilitan yang dililit sama banyaknya dengan jumlah kutub dan phasa stator. Jumlah lilitan efektif tiap phasa pada lilitan stator banyaknya a kali jumlah lilitan rotor. Bandingkan efek magnetis rotor ini dengan yang terdapat pada rotor ekivalen magnetik yang mempunyai jumlah lilitan yang sama seperti stator. Untuk kecepatan dan fluks yang sama, hubungan antara tegangan Erotor yang
diimbaskan pada rotor yang sebenarnya dan tegangan E2s yang diimbaskan pada rotor
ekivalen adalah
s
E2 = aErotor ……….…………..(2.8)
Bila rotor – rotor akan diganti secara magnetis, lilitan-ampere masing- masing harus sama, dan hubungan antara arus rotor sebenarnya Irotor dan arus I2s pada rotor
ekivalen haruslah
s
I2 = a Irotor
……….……….(2.9) 1
V
1 R
1 X
1 I
c
R Xm
Φ
I
c
I Im
2 I
Akibatnya hubungan antara impedansi bocor frekuensi slip Z2S dari rotor ekivalen dan impedansi bocor frekuensi slip Zrotor dari rotor yang sebenarnya haruslah sebagai berikut
Z2S= =
S S
I E
2 2
= rotor
rotor
I E a2
rotor
Z
a2 ( Ohm ) ………. .(2.10)
Karena rotor terhubung singkat, hubungan fasor antara ggl frekuensi slip E2s
yang dibangkitkan pada phasa patokan dari rotor patokan dan arus I2s pada phasa
tersebut adalah
= S
S
I E
2 2
S
Z2 = R2+ jsX2 ………..(2.11)
Dimana: Z2S= impedansi bocor rotor frekuensi slip/phasa (Ohm)
2
R = tahanan rotor (Ohm)
2
sX = reaktansi bocor patokan pada frekuensi slip (Ohm)
Reaktansi yang didapat pada persamaan (2.11) dinyatakan dalam cara yang demikian karena sebanding dengan frekuensi rotor dan slip. Jadi X2 didefinisikan sebagai harga yang akan dimiliki oleh reaktansi bocor pada rotor dengan patokan pada frekuensi stator.
Pada stator ada gelombang fluks yang berputar pada kecepatan sinkron. Gelombang fluks ini akan mengimbaskan tegangan pada rotor dengan frekuensi slip sebesar E2s dan ggl lawan stator E1. Bila bukan karena efek kecepatan, tegangan rotor akan sama dengan tegangan stator, karena lilitan rotor identik dengan lilitan stator. Karena kecepatan relatif gelombang fluks terhadap rotor adalah s kali kecepatan terhadap stator, hubungan antara ggl efektif pada stator dan rotor adalah
s
Gelombang fluks magnetik pada rotor dilawan oleh fluks magnetik yang dihasilkan komponen beban I2 dari arus stator, dan karenanya, untuk harga efektif
s
I2 = I2 ...(2.13) Dengan membagi persamaan (2.12) dengan persamaan (2.13) didapatkan:
= S S I E 2 2 2 2 I E s ……….………(2.14)
Didapat hubungan antara persamaan (2.13) dengan persamaan (2.14), yaitu
= S S I E 2 2 2 2 I E s
= R2+ jsX2 ………..….(2.15)
Dengan membagi persamaan (2.15) dengan s, maka didapat
2 2 I E = s R2
+ jX2 ……….………..(2.16)
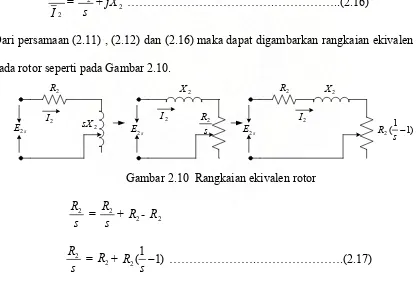
Dari persamaan (2.11) , (2.12) dan (2.16) maka dapat digambarkan rangkaian ekivalen pada rotor seperti pada Gambar 2.10.
Gambar 2.10 Rangkaian ekivalen rotor
s R2
= s R2
+ R2- R2
s R2
= R2+ 2(1−1) s
R ……….……….(2.17)
Dari penjelasan mengenai rangkaian ekivalen pada stator dan rotor di atas, maka dapat dibuat rangkaian ekivalen motor induksi tiga phasa pada masing-masing phasanya dan untuk mempermudah perhitungan maka rangkaian ekivalen dilihat dari sisi stator seperti pada Gambar 2.11.
s E2 2 R 2 sX 2 X s R2 2 R ) 1 1 ( 2 − s R 2
I I2
2
X
2
I
s
Gambar 2.11 Rangkaian ekivalen motor induksi sisi stator Dimana: X'2= a2X2
2 '
R = a2R2
2.6 Pengaturan Putaran Motor Induksi
Operasi putaran suatu motor induksi, diberikan oleh persamaan :
) 1 ( . 120 ) 1
( S
p f S
n
nr = s − = − ………..(2.18)
Dari persamaan 2.18, dapat dilihat bahwa pengaturan putaran pada motor induksi dapat dilakukan beberapa cara, yakni:
Mengubah jumlah kutub
Salah satu cara pengaturan putaran adalah dengan mengubah jumlah kutub p, dan ini hanya dapat memberikan perubahan putaran yang diskrit, karena p harus merupakan bilangan bulat. Dengan perencanaan yang benar dari rotor sangkar , hanya diperlukan untuk mengubah jumlah kutub dari belitan stator, bersamaan dengan itu arus akan rotor akan menemukan jalurnya masing-masing pada sangkar.
Mengubah frekuensi
Pengaturan frekuensi untuk mengendalikan putaran motor induksi biasanya dibarengi juga dengan pengaturan tegangan masuk yang sebanding dengan frekuensi. Dengan menggunakan inverter , yaitu suatu alat yang dapat mengubah tegangan searah menjadi tegangan bolak-balik, frekuensi yang dihasilkan dapat dibuat berubah.
1 V
1
R X1
c
R
m
X
2 ' R '
2 X
) 1 1 ( '
2 −
s R 1
I I0
c
I
m
I
Perubahan frekuensi arus bolak-balik dari inverter ini ditentukan oleh periode pulsa yang memicu penyearah yang digunakan. Dengan mempercepat atau memperlambat periode pulsa yang memicu penyearah, frekuensi dan juga kecepatan dapat diatur. Mengubah tegangan stator
Pengaturan putaran dengan mengubah tegangan stator dapat dilakukan dengan mengatur vektor tegangannya. Pengaturan vektor tegangan ini menggunakan pengendalian umpan balik torsi dan fluks stator .Fluks dan torsi dihitung dari tegangan dan arus stator yang diukur pada motor. Fluks dan torsi ini merupakan keadaan aktual, yang akan dibandingkan dengan torsi dan fluks referensi untuk menentukan kondisi torsi error, fluks error dan posisi fluks stator. Dengan menggabungkan output torsi error, output fluks error, dan posisi fluks stator maka dapat diperoleh posisi switching inverter yang akan menentukan besar tegangan dan arus yang diberikan ke stator. Pengaturan ini dapat dilakukan dengan Direct Torque Control (DTC) dan pengaturan dengan metode ini akan dibahas lebih lanjut pada BAB berikutnya.
2.7 Perhitungan Performansi Motor Induksi Tiga Phasa 2.7.1 Aliran Daya Pada Motor Induksi
[image:30.595.118.504.572.705.2]Pada motor induksi tidak ada sumber tegangan yang langsung terhubung ke rotor, sehingga daya yang melewati celah udara sama dengan daya yang yang diinputkan ke rotor.
Gambar 2.12 Rangkaian ekivalen per-phasa motor induksi tiga phasa R1 X1
c m
Rc Xm
'
2 '
2
R X2'
Pg
1
( )
s s R2' 1−
m
ω
PFW/3
Ps/3
Ts/3
1 V a
n -+
dengan: PFW = Rugi-rugi gesek dan angin motor
Ps = Daya penggerak poros
Ts = Torsi penggerak poros
Model rangkaian ekivalen per phasa motor induksi tiga phasa pada Gambar 2.12 menggambarkan proses pengubahan daya elektromekanik pada motor induksi tiga phasa. Daya total yang diinputkan pada kumparan stator (P1) dapat dirumuskan sebagai
berikut:
P1 = 3 V1I1 Cos θ ……….(2.18)
dengan: V1 = tegangan sumber
I1 = arus masukan
θ = perbedaan sudut phasa antara arus masukan dan tegangan sumber Sebelum daya ditransfer melewati celah udara, motor induksi mengalami rugi- rugi berupa rugi-rugi tembaga stator (3 I12 R1) dan rugi-rugi inti stator (3 E12 / Rc ).
Daya yang ditransfer melalui celah udara (3 PAG) sama dengan penjumlahan rugi-rugi
tembaga rotor (3Prcu) dan daya mekanik (3 Pd). Daya yang ditransfer melalui celah
udara ini sering disebut juga dengan daya input rotor. 3 PAG = 3 Prcu + 3 Pm
3 s R I ' 2 2 ' 2)
( = 3(I2')2R2' + 3( 2')2(1 )R2' s
s
I − ……….. .(2.19)
[image:31.595.98.502.592.707.2]Untuk lebih jelasnya dapat dilihat pada Gambar 2.13 yang menggambarkan diagram aliran daya pada motor induksi tiga phasa.
Gambar 2.13 Diagram aliran daya pada motor induksi tiga phasa
θ
Cos I V1 1
3
Rugi - rugi tembaga stator
Rugi - rugi inti stator
Rugi - rugi tembaga rotor Konversi daya Daya mekanik Rugi-rugi gesek dan angin 1 2 1
3I R 3E12/Rc ' 2 2'
2 )
(
3 I R
' 2 2 ' 2 ) 1 ( ) ( 3 R s s I − s P Celah Udara FW P m s Tω s R I
PAG 3( ) /
3 2'
2 ' 2
Hubungan antara rugi-rugi tembaga rotor dan daya mekanik dengan daya input rotor, masing-masing dalam besaran per-phasa dapat ditulis sebagai berikut:
rcu
P = (I2')2R2'=sPAG ……….……..…. (2.20)
d
P = R s PAG
s s
I ) (1 ) (1 )
( 2' 2 − 2'= − ………...(2.21)
Dari gambar 2.13 juga dapat dilihat bahwa motor induksi juga mengalami rugi-rugi gesek dan angin (PFW ) sehingga daya output mekanik yang merupakan daya
penggerak poros (Ps) sama dengan daya mekanik total (3Pd) dikurangi rugi-rugi gesek
dan angin (PFW ).
m s FW d
s P P T
P =3 − = ω ………(2.22) dengan Ts = torsi penggerak poros
m
ω = kecepatan sudut poros
2.7.2 Perhitungan Torsi Pada Motor Induksi Tiga Phasa
Torsi mekanik (Td) dapat dihitung dengan membagi persamaan (2.21) dengan
kecepatan sudut poros (ωm ).
s R I s P T m m d d ' 2 2 ' 2) ( ) 1 ( ω ω = − = ………...……….…(2.23) s m s m s m m s n n s ω ω ωω ω ω− = − = −
= 1 ………...…...(2.24)
dengan ωs =kecepatan sudut sinkron (radian/detik)
= m
ω kecepatan sudut poros rotor (radian/detik)
s
m sω
ω =(1− )
Rangkaian ekivalen pada Gambar 2.11 dapat disederhanakan sehingga menjadi rangkaian Thevenin seperti diperlihatkan pada Gambar 2.14. Dengan rangkain ini, harga arus rotor (I2')dapat dihitung, sehingga persamaan torsi yang diinginkan dapat diperoleh.
Gambar 2.14 Rangkaian ekivalen Thevenin per phasa motor induksi tiga phasa
Dengan: Vφ
Z Z Z V M M Th 1 + = M C M C M jX R jX R Z +
= ; Z1 =R1 + jX1
Sehingga: 2 ' 2 Z Z V I Th Th + = 2 2 2' jX jX s R R V I Th Th Th + + + = ………...(2.26)
Besar arus ini adalah:
2 2 2 ' 2 ' 2 ) ( )
(R R s jX jX
V I Th Th Th + + + = ………...(2.27)
Substitusi persamaan (2.26) ke persamaan (2.25) dan pengalian dengan 3 (untuk torsi tiga phasa) diperoleh persamaan torsi mekanik total:
(
)
⎥⎥ ⎦ ⎤ ⎢⎢ ⎣ ⎡
+ + ⎟⎟⎠ ⎞ ⎜⎜⎝
⎛ + =
2 ' 2 2
' 2
' 2 2
3 ,
3
X X s
R R
s R V T
Th Th
s
Th
d
ω
φ ………..……….……(2.28)
2.8 MODEL DINAMIK MOTOR INDUKSI 2.8.1 Model Motor Induksi Dua Phasa
Rangkaian ekivalen motor seperti diuraikan sebelumnya hanya dapat digunakan untuk menganalisa performansi motor induksi dalam keadaan stabil (steady-state). Ini menyebabkan kondisi transien ketika terjadi perubahan beban dan perubahan frekuensi diabaikan. Perubahan ini terjadi pada aplikasi yang membutuhkan penggerak pengatur kecepatan yang variabel (variable speed drive). Model dinamik ini digunakan untuk melihat pengaruh perubahan sesaat tegangan/arus, frekuensi stator dan torsi. Untuk mendapatkan model dinamik motor induksi, maka ada beberapa asumsi yang diambil pada motor induksi yaitu:
1. Celah udara yang seragam (Uniform air gap)
2. Kumparan stator dan rotor motor seimbang, dengan distribusi magnetomotive force (mmf) yang sinusoidal.
3. Induktansi bervariasi secara sinusoidal terhadap posisi rotor. 4. Perubahan parameter motor dan saturasi diabaikan.
Gambar 2.15 Kumparan stator dan rotor motor induksi dua phasa
Tegangan terminal pada kumparan stator dan rotor merupakan penjumlahan tegangan jatuh pada resistansi dengan rata-rata perubahan fluks (persamaan 2.29 s/d 2.32) Perubahan fluks ini merupakan perkalian arus dengan induktansi.
) 32 . 2 ...( ... ... ) ( ) ( ) ( ) ( ) 31 . 2 ...( ... ... ) ( ) ( ) ( ) ( ) 30 . 2 ...( ... ... ) ( ) ( ) ( ) ( ) ( ) 29 . 2 ...( ... ... ) ( ) ( ) ( ) ( β ββ β β α βα β β β β αβ α αα α α α α α β β α α β β α α i L p i R i L p i L p i L p v i L p i L p i R i L p i L p v i L p i L p i L p i R i L p v i L p i L p i L p i L p i R v ds d qs q ds d qs q d d ds dd ds d qs dq ds q q ds qd qs qq qs q qs + + + + = + + + + = + + + + = + + + + =
dengan p adalah operator diferensial d/dt. vqs,vds,vα,vβadalah tegangan terminal stator pada koordinat q, d, dan pada kumparan rotor αdan β. iqsdan idsadalah arus stator pada koordinat d dan q. iαdan iβadalah arus rotor pada kumparan αdan β.
αα L L
Lqq, dd, dan Lββadalah induktansi diri pada q, d axis dan pada kumparan αdan β. T1 adalah jumlah belitan kumparan stator, sementara T2 adalah jumlah belitan
kumparan rotor. Induktansi bersama antara dua buah kumparan dilambangkan dengan L, dengan dua subscript. Subscript pertama menyatakan ggl induksi yang timbul pada sebuah kumparan oleh karena arus pada kumparan lain (arus pada kumparan lain ini dinotasikan dengan subscript kedua). Sebagai contohLqdmerupakan induktansi
d-axis q-axis ds v 1 T 2 T α
v
i
αβ i β v qs i r
θ
Stator Rotorα
β
2 T 1 T dsi
+ − + − + −vqsbersama antara kumparan d dan q disebabkan arus pada kumparan d. Dengan asumsi celah udara yang seragam (uniform) maka besarnya induktansi diri konstan setiap saat tanpa dipengaruhi posisi angular rotor.
rr
L L
Lαα = ββ = (Lrr=Induktansi rotor)……….……(2.33)
s qq
dd L L
L = = (Ls =Induktansi stator) ……….…...(2.34)
Induktansi bersama antara kumparan-kumparan stator dan antara kumparan-kumparan rotor adalah nol, karena fluks yang timbul pada kumparan tidak akan melingkupi kumparan lain yang berbeda sudut 900. Sehingga:
0
= = βα αβ L
L ………..….…..(2.35)
0
= = qd
dq L
L ………..(2.36)
Induktansi bersama antara kumparan stator dengan rotor merupakan fungsi posisi rotor,
r
θ . Induktansi bersama ini merupakan fungsi sinusoidal karena asumsi mmf
(magnetomotive force) yang sinusoidal pada kumparan. Karena kumparan stator dan rotor adalah simetris, maka induktansi bersama antara kumparan stator dengan rotor adalah sama apakah dilihat dari sisi stator ataupun rotor.
r sr d
d L L Cos
Lα = α = θ ………..(2.37)
r sr d
d L L Sin
Lβ = β = θ ………...(2.38)
r sr q
q L L Sin
Lα = α = θ ………...(2.39)
r sr q
d L L Cos
Lβ = β =− θ ………(2.40)
Dengan Lsradalah nilai puncak induktansi bersama kumparan stator dengan kumparan rotor. Persamaan 2.40 bernilai negatif karena arus yang bernilai positif pada kumparan β menghasilkan fluks linkage yang bernilai negatif pada kumparan q. Dengan
persaman differensial dengan induktansi yang bervariasi terhadap waktu. Persaman tersebut menjadi:
) (
) (
)
( s s qs sr r sr r
qs R L p i L p i Sin L p i Cos
v = + + α θ − β θ ………..…….(2.41)
) (
) (
)
( s s ds sr r sr r
ds R L p i L p i Cos L p i Sin
v = + + α θ + β θ ………...…….(2.42)
α α L p i Sinθ L p i Cosθ R L p i
v = sr ( qs r)+ sr ( ds r)+( rr + rr ) ………..……(2.43)
β β L p i Cosθ L p i Sinθ R L p i
v =− sr ( qs r)+ sr (ds r)+( rr + rr ) ...………….(2.44)
dengan: Rs =Rq =Rd =tahanan stator
= = =Rα Rβ
Rrr tahanan rotor Lrr = induktansi rotor
= s
L induktansi stator
Lsr = induktansi bersama kumparan stator dengan rotor
Persamaan 2.41 s/d 2.44 berubah-ubah menurut waktu karena dipengaruhi oleh posisi sesaat rotor (θr). Oleh karena itu untuk mempermudah menganalisis performansi motor dibutuhkan persamaan yang lebih sederhana yang besarnya tidak tergantung pada posisi rotor.
2.8.2 Transformasi Untuk Memperoleh Matriks yang Konstan
Gambar 2.16 Transformasi variabel rotor dari nilai aktual ke nilai khayalan
Pada proses ini nilai khayalan rotor setiap phasa-nya memiliki jumlah belitan yang sama dan juga menghasilkan mmf (magnetomotif force) yang sama dengan kumparan aktual rotor. Dengan memproyeksikan kumparan αdan β ke sumbu d-axis dan q-axis, maka akan didapatkan arus pada kumparan khayalan idrrdan
qrr
i (persamaan 2.45)
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ β α θ
θθ θ i
i Cos Sin Sin Cos i i r r r r qrr drr ……...………(2.45)
Transformasi ini berlaku untuk tegangan, arus dan fluks linkages pada sebuah mesin. Persamaan (2.45) ditulis menjadi:
[ ]
Tαβ iαβidqrr = .………..(2.46)
dengan idqrr =
[
idrr iqrr]
t .……….(2.47)[
]
ti i
iαβ = α β ..………...…………...(2.48)
dan ⎥
⎦ ⎤ ⎢ ⎣ ⎡ − = r r r r Cos Sin Sin Cos T θ θθ θ
αβ ………(2.49)
q-axis qrr v ds v ds i drr
i
1 T 2 T 2 T αv
i
αTransformasi dari bentuk α-βaxis ke d-q axis berlaku juga untuk sebaliknya karena: 1
− = αβ αβ T
T ..………...(2.50) Dengan demikian diperoleh:
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ qrr drr r r r r i i Cos Sin Sin Cos i i θ θθ θ β α ………..(2.51)
dan untuk persamaan tegangan diperoleh:
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ qrr drr r r r r v v Cos Sin Sin Cos v v θ θθ θ β α ………...(2.52)
dengan memasukkan transformasi pada persamaan (2.45) ini kedalam persamaan (2.41) dan (2.42) didapatkan
) ( )
(R L p i L p
vqs = s + s qs + sr iqrr …………...…….……(2.53) )
( )
( s s ds sr drr
ds R L p i L p i
v = + + ………...…..(2.54)
dengan memasukkan nilai iα dari persaman (2.51) kedalam persamaan (2.43) didapatkan
[
drr r qrr r]
rr rr r ds sr r qs
srp i Sin L p i Cos R L p i Cos i Sin
L
vα = ( θ )+ ( θ )+( + ) θ + θ
= LsrSinθrpiqs+Lsriqsθ&rCosθr +LsrCosθrpids −Lsridsθ&rSinθr +
Rrr
[
idrrCosθr +iqrrSinθr]
+LrrCosθrpidrr −Lrridrrθ&rSinθr +LrrSinθrpiqrr+Lrriqrrθ&rCosθr
=
α
v
[
Lsrpiqs −Lsrθ&rids −Lrrθ&ridrr +(Rrr +Lrrp)iqrr]
Sinθr +
[
Lsrθ&r iqs +Lsrpids +Lrrθ&riqrr +(Rrr +Lrr)idrr]
Cosθr …………..(2.55)dengan,θ&radalah turunan dariθrterhadap waktu.
Dari persamaan transformasi (3.53) bahwa vα =vdrrCosθr +vqrrSinθrsehingga:
= drr
= qrr
v
[
Lsrpiqs −Lsrθ&rids −Lrrθ&ridrr +(Rrr +Lrrp)iqrr]
………..(2.57) Dari (2.53), (2.54) ,(2.56) dan (2.57) persamaan vektor tegangan tersebut dituliskan dalam bentuk matriks yaitu:⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + − + − + + = ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ p L R L p L L L p L R L p L p L p L R p L p L R v v v v rr rr r rr sr sr r rr rr rr r sr sr sr s s sr s s drr qrr ds qs θ θ θ θ & & & & 0 0 0 0 ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ drr qrr ds qs i i i i ...….(2.58)
Seperti halnya pada rangkaian ekivalen trafo, jika dilihat dari sisi stator persamaan (2.58) menjadi: ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + − + − + + = ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ p L R L p L L L p L R L p L p L p L R p L p L R v v v v r r r r m m r r r r r m m m s s m s s dr qr ds qs θ θ θ θ & & & & 0 0 0 0 ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ dr qr ds qs i i i i ...……...(2.59) dengan: rr
r a R
R = 2 ,
a i
iqr = qrr , vqr =avqrr,
2 1 T T a= rr
r a L
L = 2 ,
a i i drr
dr = , vdr =avdrr, Lm =aLsr
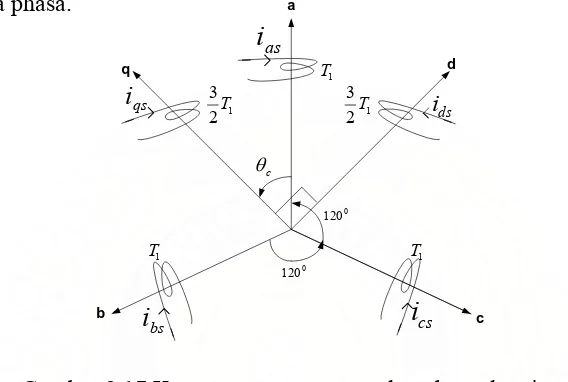
2.8.3 Transformasi Tiga Phasa ke Dua Phasa
[image:41.595.156.440.243.434.2]Model motor induksi yang dibahas sebelumnya adalah untuk mesin dua phasa. Mesin induksi dua-phasa jarang sekali digunakan dalam aplikasi industri. Model dinamik motor induksi tiga phasa diturunkan dari mesin dua phasa. Kedua model ini ekivalen karena kumparan pada dua phasa dan tiga phasa menghasilkan mmf (magnetomotive force) dan arus yang sama. Gambar 2.17 menunjukkan kumparan dua phasa dan tiga phasa.
Gambar 2.17 Kumparan stator motor dua phasa dan tiga phasa.
Dengan menganggap kumparan tiga phasa masing-masing memiliki jumlah belitan (T1) per phasa. Untuk menghasilkan mmf yang sama maka kumparan dua phasa
mempunyai jumlah belitan (3T1/2) per phasa. mmf pada sumbu d-q didapat dengan
memproyeksikan mmf (magnetomotive force) tiga phasa pada sumbu d-q. Dimisalkan sumbu q tertinggal θcdari sumbu a, maka hubungan antara arus phasa d-q dengan phasa abc adalah:
Arus io menyatakan ketidakseimbangan arus phasa a, b dan c dan dikenal sebagai arus
urutan nol. Persamaan diatas dituliskan dengan:
[ ]
abc abcqdo T i
i = ………(2.61)
dengan: iqdo=
[
iqs ids io]
t ……….(2.62)[
]
tcs bs as
abc i i i
i = ………...(2.63)
dan variabel transformasi dari phasa abc ke phasa d-q adalah:
[ ]
32= abc T ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + − + − 2 1 2 1 2 1 ) 3 2 ( ) 3 2 ( ) 3 2 ( ) 3 2 ( π θ π θ θ π θ π θ θ c c c c c c Sin Sin Sin Cos Cos Cos ………..(2.64)
Transformasi dari arus dua phasa ke arus tiga phasa adalah
[ ]
abc qdoabc T i
i = −1 ………..(2.65)
[ ]
⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + + − − = − 1 ) 3 2 ( ) 3 2 ( 1 ) 3 2 ( ) 3 2 ( 1 1 π θ π θ π θ π θ θ θ c c c c c c abc Sin Cos Sin Cos Sin CosT ………...(2.66)
Jika sumbu q pada Gambar 2.18 berimpit dengan phasa a (θc =0),maka transformasi dari sumbu abc ke sumbu d-q menjadi seperti pada persamaan (2.67). Kondisi seperti ini disebut model stator reference-frames.
⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − − = 2 1 2 1 2 1 2 3 2 3 0 2 1 2 1 1 3 2 abc s
Sehingga untuk tegangan pada dua phasa: ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ cs bs as abc s ds qs v v v T v v v 0 ……….(2.68) = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ 0 v v v ds qs ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − − 2 1 2 1 2 1 2 3 2 3 0 2 1 2 1 1 3 2 ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ cs bs as v v v ………(2.69) sehingga,
(
)
⎥⎦⎤ ⎢⎣ ⎡ − += as bs cs
qs v v v
v 2 1 3 2 ………....(2.70)
untuk sistem tiga phasa yang seimbang berlaku: 0
= +
+ bs cs
as v v
v ………(2.71)
maka
as cs
bs v v
v + )=−
( ……….……..(2.72)
dengan mensubstitusikan persamaan (2.72) ke dalam persamaan (2.70) didapatkan tegangan quadrature stator (vqs)menjadi:
as as
qs v v
v = ⎥⎦ ⎤ ⎢⎣ ⎡ = 2 3 3 2 ……….….…(2.73)
dengan cara yang sama didapatkan
cb bs
cs
ds v v v
v 3 1 ) ( 3 1 = −
= ……….….…...(2.74)
as
qs i
i = ……….………....(2.75)
) (
3 1
bs cs
ds i i
BAB III
PENGONTROLAN TORSI SECARA LANGSUNG (DIRECT TORQUE CONTROL)
3.1 Umum
Dalam penggunaannya, motor induksi dapat dioperasikan dengan kecepatan yang bervariasi. Oleh karena itu, motor induksi banyak dipergunakan dalam industri saat ini. Pengaturan kecepatan putaran motor induksi dapat dilakukan dengan beberapa metode dan salah satu metode yang digunakan adalah dengan mengontrol torsi motor induksi secara langsung.
Direct Torque Control merupakan kemajuan terbaru dalam teknologi pengontrolan motor induksi. Seperti diketahui bahwa fungsi dasar penggerak pengatur kecepatan (variable speed drive) adalah mengendalikan aliran energi dari jala-jala ke mesin dalam proses produksi industri. Energi ini disuplai lewat poros motor. Dua besaran yang dapat diukur yang menunjukkan kondisi poros ini adalah torsi dan kecepatan. Untuk mengendalikan aliran energi maka besaran tersebut harus diatur. Dalam prakteknya salah satu dari besaran ini harus dikontrol yang dikenal dengan kontrol torsi (torque control) dan kontrol kecepatan (speed control). Ketika variable speed drive beroperasi sebagai kontrol torsi maka kecepatan bergantung kepada beban. Sebaliknya ketika beroperasi sebagai kontrol kecepatan, maka torsi bergantung kepada beban.
penggerak pengatur kecepatan mesin ac (ac variable speed drive) didasari atas keinginan untuk menandingi bahkan melebihi performansi yang cukup bagus yang dimiliki penggerak motor dc (dc drives), seperti respon torsi yang cepat dan pengaturan kecepatan yang akurat dengan memanfaatkan berbagai kelebihan motor ac.
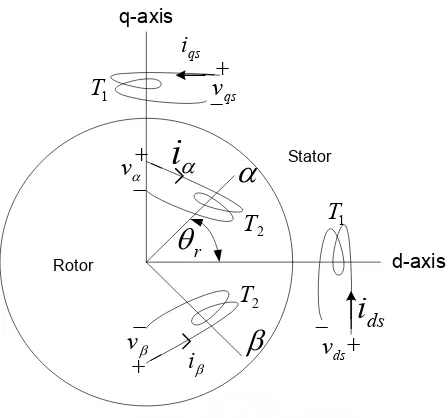
3.2 Pengontrolan Vektor Pada Motor Induksi
[image:46.595.115.482.409.669.2]Teknik pengontrolan pada motor induksi yang dikenal dengan field-oriented control (FOC) bekerja dengan performansi dinamik yang tinggi yang sebanding dengan karakteristik dari motor dc. Pengontrolan motor induksi ini dilakukan dengan mengontrol parameter motor dalam besaran vektor. Pengontrolan vektor ini menggunakan pengendalian umpan balik torsi dan fluks stator (Gambar 3.1). Fluks dan torsi dihitung dari tegangan dan arus stator yang diukur pada motor. Metode ini menggunakan model referensi stator (stator reference frames) motor induksi.
Gambar 3.1 Skema DTC
dt d i R
vs = s s + λs ……….(3.1)
sehingga:
dt i R vs s s
s =∫( − )
λ .. ………...….(3.2)
dengan:vs = vektor tegangan stator is = vektor arus stator
= s
R tahanan stator
= s
λ vektor fluks stator
dengan demikian fluks linkages dalam koordinat stator reference frames dihitung berdasarkan
dt i R vqs s qs
qs =∫( − )
λ ………..(3.3)
dt i R vds s ds
ds =∫( − )
λ ………..………(3.4)
sehingga besarnya fluks stator adalah: 2
2
) ( )
( qs ds
s λ λ
λ = + ∠θfs .………...…….(3.5)
⎟⎟⎠ ⎞ ⎜⎜⎝ ⎛ = − ds qs fs λ λ θ 1
tan ……….……….(3.6)
Persamaan torsi elektromagnetik adalah:
(
qs ds ds qs)
e i i
P
T = λ − λ
2 2 3
………..…..……….(3.7)
Frekuensi listrik dihitung dengan mendifferensialkan sudut vektor fluks rotor yaitu:
⎪⎭ ⎪ ⎬ ⎫ ⎪⎩ ⎪ ⎨ ⎧ ⎟⎟⎠ ⎞ ⎜⎜⎝ ⎛ = = − ds qs r e dt d dt d λ λ θ ω 1 tan 2 s qs ds ds qs e λ λ λ λ λ
Persamaan kecepatan rotor adalah : ) ( 2 r e r e r T R P λ ω
ω = − ………(3.9)
dengan komponen d dan q-axis diperoleh dari transformasi tiga phasa ke sistem dua phasa.
as
qs i
i = ……….……….……..…....(3.10)
) ( 3 1 bs cs
ds i i
i = − ………...……….…………..…..(3.11) 3.3 Kondisi Switching Dan Vektor Tegangan Output Inverter
[image:48.595.90.504.318.531.2]Rangkaian daya penggerak motor induksi tiga phasa dapat dilihat pada Gambar 3.2. Motor Induksi Tiga Phasa Sumber Tegangan Tiga Phasa
T1 3
T T T T T 2 4 5 6 a b c TR R R cf Diode-Bridge Rectifier Regenerating
Circuit Link Filter PWM Inverter
a b c D1 D2 3 D 4 D 5 D 6 D
Gambar 3.2 Rangkaian daya penggerak motor induksi tiga phasa
Gambar 3.3 Bentuk gelombang tegangan keluaran Dioda
[image:49.595.96.503.408.695.2]Setelah disearahkan maka tegangan ini akan diubah kedalam tegangan bolak-balik yang akan diberikan kepada motor induksi tiga phasa. Bentuk tegangan yang dihasilkan oleh inverter ini untuk konduksi 1800 pada transistor adalah seperti pada Gambar 3.4.
Gambar 3.4 Bentuk tegangan keluaran Inverter π
3
π 2π
π 2π
π 2π 3π
π
3
t
ω
t
ω
t
ω
Vas
Vbs
Vcs
0 dc
V 3 2
dc
V 3 1
dc
V 3 1
dc
V 3 1
−
dc
V 3 2
−
dc
V 3 1
Vc
b V Vac a
b Vbc V
b
a Vca
12 23 34 45
0
Vm
Vm
900 180 2700
Vm
600 1200 1800 2400 3000 3600
Vc
b V Vac a
b Vbc V
b
a Vca
56 61
0
Pada Inverter tiga-phasa seperti pada Gambar 3.2 dapat dibuat beberapa kombinasi switching yang akan menghasilkan vektor tegangan yang berbeda. Jika T1
on dan T4 off (dilambangkan dengan Sa = 1) maka pada Va timbul tegangan sebesar
Vdc, seperti dapat dilihat pada Tabel 3.1. Demikian juga halnya pada Sb dan Sc. Ketika
T1 dan T4 off maka tidak ada tegangan pada Va.
Tabel 3.1 Kondisi Switching Inverter Phasa a T1 T4 Sa Va
on off off off 1 0 Vdc 0
Tegangan output tiga phasa diperoleh dari konfigurasi waktu penyalaan enam buah transistor pada Gambar 3.2 tersebut. Ada 8 jenis switching yang berbeda yang dapat dibuat dari kombinasi Sa, Sb, dan Sc. Delapan jenis switching ini akan
menghasilkan 8 buah vektor tegangan output inverter yang berbeda. Vektor tegangan yang terjadi untuk tegangan line to line berlaku:
⎪⎭ ⎪ ⎬ ⎫ − = − = − = a c ca c b bc b a ab v v v v v v v v v ……….. ………(3.12)
Untuk sistem yang setimbang berlaku: 0
= +
+ b c
a v v
v ……….………..………..…(3.13)
c b
a v v
v =− − persamaan ini dimodifikasi menjadi:
a c b a a
a v v v v v
v +2 = − − +
ca ab
a v v
v = −
3 3 ca ab a v v
Sehingga tegangan phasa kumparan stator motor adalah: 3 ca ab as v v
v = − …………..……….………....(3.14)
dengan cara yang sama didapatkan
3 ab bc bs v v
v = − ………..………..(3.15)
3 bc ca cs v v
v = − ………..………..(3.16)
dengan, vas,vbs,vcs =tegangan phasa kumparan stator motor. dan tegangan stator motor pada d dan q axis adalah:
as as
qs v v
v = ⎥⎦ ⎤ ⎢⎣ ⎡ = 2 3 3 2 ..………..……….(2.73) cb bs cs
ds v v v
v 3 1 ) ( 3 1 = − = ………..………….(2.74)
dari persamaan (3.12), (3.14 s/d 3.16), (2.73), dan (2.74) didapatkan tegangan pada mesin (juga merupakan tegangan output inverter) untuk setiap jenis switching yang dapat dilihat pada Tabel 3.2.
Tabel 3.2 Kondisi Switching Inverter
Switcing I II III IV V VIII b
Sa S Sc V Vab Vbc ca Vbs Vcs Vqs V ds
0 0
1 0 −Vdc
dc V 3 2 − 3 dc V − dc V 3 2 dc V 3 1
− Vdc
3 1
− Vdc
3 2
0
1 0 1
dc V 3 1 3 dc V
Va Vb c
dc
V 0 Vdc 0
V Vas
dc
V 0 Vdc Vdc −Vdc 0 Vdc
3 1 dc V 3 1
0 0 1 0 0 Vdc 0 −Vdc Vdc Vdc
3 1
− Vdc
3 1
− Vdc
3 2 dc V 3 1 − 3 dc V
0 1 1 0 Vdc Vdc −Vdc 0 Vdc Vdc
3 2
− Vdc
3 1 dc V 3 1 dc V 3 2 − 0 VI
0 1 0 −Vdc Vdc 0 Vdc
3 1
− Vdc
3 2 dc V 3 1
− Vdc
3 1 −
1
1 0 Vdc Vdc 0 0 Vdc −Vdc Vdc
3 1 dc V 3 1 dc V 3 2 − 3 dc V −
VII 0 0
dc
V
3 1
0 0 0 0 0 0 0 0 0 0 0
1
1 V V V 0
0
0 0 0 0 0 0 0
0
dc
V
0
[image:51.595.126.507.302.412.2]1
Gambar 3.5 Tegangan output inverter untuk setiap switching.
Jadi untuk berbagai jenis switching inverter didapatkan phasor tegangan stator yang berbeda sebagai resultan dari Vqs dan Vds (Gambar 3.5, Tabel 3.3 dan Tabel 3.4).
Tabel 3.3 Tegangan Keluaran Inverter
q
d
dc
V
3 1
dc
V
3 2
dc
V
3 1
−
dc
V
3 1 −
dc
V
3 2 −
I
II
III V
IV (VII,VIII)
(0,0)
VI Vdc
Tabel 3.4 Sambungan Tabel Tegangan Keluaran Inverter
Dengan phasor tegangan yang berubah-ubah maka sesuai dengan persamaan (3.1) dan (3.2) didapat fluks stator berubah secara vektoris.
3.4 Pengontrolan Fluks
q
s
λ
ds
λ
qs
λ
0
60
0
60
0
60
0
60
0
60
fs
θ
1
3
4 5
6
2
d
[image:54.595.177.423.74.330.2]Gambar 3.6