PERANCANGAN DAN SIMULASI METODE DIRECT TORQUE
CONTROL (DTC) UNTUK PENGATURAN KECEPATAN MOTOR
INDUKSI TIGA FASA
Panji Kurniawan – 2206100127
Jurusan Teknik Elektro – FTI, Institut Teknologi Sepuluh Nopember Kampus ITS, Surabaya – 60111
e-mail:[email protected]
Abstrak - Salah satu metode pengaturan kecepatan motor
induksi yang dikembangkan selain kontrol vektor adalah metode Direct Torque Control (DTC). Teknik kontrol DTC memungkikan pengaturan fluks dan torsi secara langsung dan terpisah serta dapat dilakukan tanpa menggunakan sensor kecepatan. Estimasi putaran rotor, torsi dan fluks dilakukan oleh DTC yang diberi masukan tegangan dan arus stator. Untuk mencapai fluks dan torsi yang dikehendaki digunakan estimasi sebagai umpan balik pada sistem kontrol. Pada tugas akhir ini dirancang dan disimulasikan suatu sistem kontrol DTC yang bertujuan untuk mengembangkan model simulasi dari DTC menggunakan program simulasi pada perangkat lunak. Hasil yang diperoleh melalui simulasi menunjukkan nilai time constant 0,24 detik untuk motor induksi 10 HP dan 1,4 detik untuk motor induksi 200 HP.
Kata Kunci: Direct Torque Control, motor induksi, Inverter.
1. PENDAHULUAN
Motor induksi merupakan motor penggerak yang paling banyak digunakan dalam bidang industri. Dengan perkembangan kemajuan teknologi dibidang mikrokontroller, mikrokomputer, dan teori kontrol mempermudah operasi dan kinerja dari motor induksi sehingga dapat menggantikan peran motor DC sebagai penggerak elektrik. Keunggulan motor induksi diantaranya adalah konstruksinya yang sederhana, harganya yang lebih murah dibandingkan motor jenis lain, serta perawatannya yang mudah. Sedangkan kekurangan dari motor induksi diantaranya adalah sifatnya yang tidak linier, teknik pengaturan kecepatannya yang relatif sulit dan membutuhkan arus starting yang tinggi sekitar enam sampai delapan kali arus nominal motor.
Pengaturan kecepatan motor induksi dapat
dilakukan dengan berbagai cara seperti kontrol
tegangan/frekuensi (v/f) atau dikenal dengan kontrol skalar. Prinsipnya adalah memaksa motor memiliki hubungan yang konstan antara tegangan dan frekuensi.Serta kontrol vektor yang mengatur secara langsung arus stator motor. Metode kontrol vektor yang sekarang ini terus dikembangkan adalah metode Direct Torque Control (DTC). Yaitu suatu teknik kontrol yang mengarah pada pengaturan dengan nilai torsi yang berubah sesuai kebutuhan beban. Perbedaan mendasar antara teknik kontrol vektor dengan DTC adalah pada kontrol vektor masukan sistem adalah kecepatan dan arus stator. Sedangkan pada DTC masukan sistem adalah fluks dan torsi.
Transformasi motor induksi dari sumbu 3 fasa (abc) menjadi sumbu 2-fasa (dq) diperlukan agar mempermudah analisa dalam pengaturan posisi atau kecepatan dan juga agar motor induksi 3 fasa memiliki sifat atau perilaku yang menyerupai motor DC sehingga lebih mudah dikontrol.
DTC pertama dikenalkan oleh ilmuwan
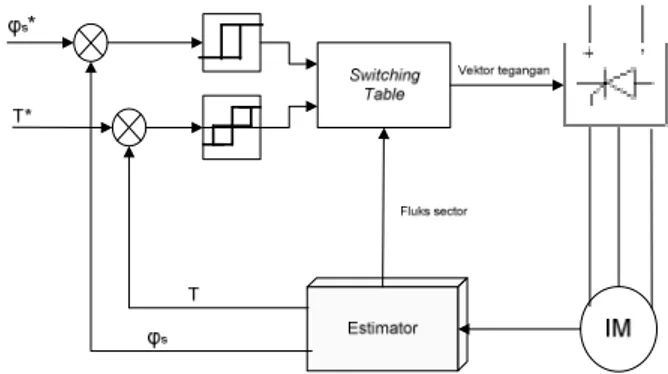
berkebangsaan Jepang (Takahashi, 1984) dan ilmuwan Jerman (Depenbrock, 1985). Blok diagram dari teknik kontrol DTC ditunjukkan oleh Gambar 1.1. [1]
Gambar 1.1 Blok diagram DTC pada motor induksi Skema dari DTC lebih sederhana dibandingkan dengan kontrol vektor karena konfigurasi dasarnya hanya terdiri dari kontroller histeresis fluks dan torsi, fluks dan torsi estimator, switching table, dan inverter. Selisih antara fluks dan torsi acuan dengan fluks dan torsi hasil estimasi merupakan kesalahan fluks dan torsi yang menjadi masukan pada fluks dan torsi komparator. Pada DTC, komparator histeresis fluks dan torsi sebagai kontroler untuk menentukan pergeseran vektor tegangan inverter yang tepat. Dua permasalahan yang biasanya dikaitkan dengan teknik kontrol DTC yang didasarkan pada histeresisnya adalah i) nilai dari frekuensi pergeseran vektor tegangan mempengaruhi nilai fluks dan torsi histeresis komparator dan ii) nilai dari estimasi fluks stator yang tidak akurat yang dapat menurunkan kinerja dari pengaturan kecepatan motor.
Pada tugas akhir ini dirumuskan suatu penyelesaian untuk mendapatkan estimasi kecepatan pada motor induksi tiga fasa dengan respon dinamis yang cepat dimana pengaturan torsi dan fluks dilakukan secara terpisah.
2. TEORI PENUNJANG 2.1 Motor Induksi
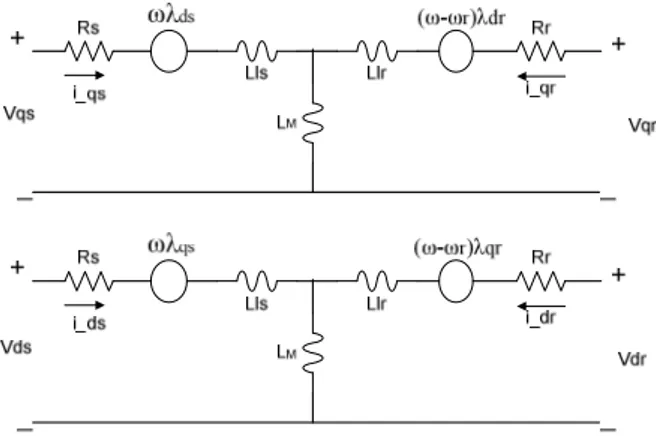
Menurut Krause P.C. [6], rangkaian ekivalen motor induksi tiga fasa pada koordinat d-q adalah seperti terlihat pada gambar 2.1 di bawah ini.
Gambar 2.1 Rangkaian ekivalen dq motor induksi 3 fasa Persamaan tegangan stator dan rotor motor induksi dinyatakan dengan :
(
)
(
r)
qr dr dr r dr qr dr r qr r qr ds qs ds s ds qs ds qs s qs p i r V p i r V p i r V p i r V λ λ ω ω λ λ ω ω λ λ ω λ λ ω . . . . . . . . . . + − − = + − + = + − = + + = (1)Fluksi yang tercakup dalam kumparan adalah :
(
)
(
)
(
)
(
ds dr)
M dr lr dr qr qs M qr lr qr dr ds M ds ls ds qr qs M qs ls qs i i L i L i i L i L i i L i L i i L i L + + = + + = + + = + + = . . . . λ λ λ λ (2)Persamaan torsi yang dihasilkan oleh mesin diberikan sebagai jumlahan
ωλ
idibagi kecepatan mekanik. Nilai torsi motor induksi dapat ditentukan dengan :(
)
(
)(
)
[
' ' ' ']
2 3 dr qr qr dr r dr qs qs ds r e i i i i p T ωλ λ ω ω λ λ ω − + − − =(3)
hubungan dengan fluks bisa ditunjukkan dengan
(
dr qr qr dr)
m(
dr qs qr ds)
ds qs qs dsi − i =− i − i =L i i −i i ' ' ' ' λ λ λ λ(4)
Sehingga persamaan torsinya dapat dituliskan sebagai :
(
' ' ' ')
2 3 ds qr qs dr m e pL i i i i T = −(
' ' ' ')
2 3 qr dr dr qr e p i i T = λ −λ(
ds qs qs ds)
e p i i T = λ −λ 2 3 (5) Kecepatan putaran motor induksi merupakan fungsi dari torsi elektromagnetik dan torsi beban. Adapun perumusan untuk mendapatkan kecepatan motor induksi adalah sebagai berikut :L e r r B T T dt d P J + = − ω ω (6) Dimana : TL = torsi beban (N.m) Te = torsi elektromagnetik (N.m) J = momen inersia (kg.m2) p = jumlah pasang kutub
ω
r = kecepatan angular rotor (rad/detik)θr = posisi sudut (rad) 2.2 Direct Torque Control (DTC)
Dasar pemikiran dan prinsip kerja metode Direct Torque Control (DTC) pertama kali dikembangkan oleh Takahasi dan Noguchi pada tahun 1986, dapat diformulasikan seperti berikut ini[3] :
1. Nilai dari fluks stator merupakan perubahan atau penambahan nilai tegangan emf stator. Oleh karena itu nilai magnitude dari fluks stator sangat bergantung dari tegangan statornya.
2. Nilai torsi elektromagnetik berbanding lurus dengan nilai sinus dari sudut antara vektor fluks stator dan fluks rotor.
3. Perubahan nilai fluks rotor sangatlah kecil jika dibandingkan fluks stator.
Berdasarkan konsep dasar DTC diatas, nilai magnitude dari fluks stator dan torsi dapat dikontrol secara langsung dengan melakukan pemilihan vektor tegangan secara tepat, yaitu pemilihan state inverter secara berurutan dengan spesifikasi berikut :
1. Vektor tegangan bukan nol yang sudut fluks statornya tidak melebihi ±900 menyebabkan fluks naik.
2. Vektor tegangan bukan nol yang sudut fluks statornya melebihi ±900 menyebabkan fluks turun.
3. Vektor tegangan nol (V0 dan V7, Vektor tegangan saat
short - circuit) tidak berpengaruh pada vektor fluks stator yang berarti motor berhenti bergeak.
4. Torsi dapat dikontrol dengan pemilihan state inverter yang tepat dimana fluks stator meningkat atau menurun.
2.2.1 Komparator Histeresis
Pada metode DTC konvensional, kontroler yang digunakan dalam mengatur kesalahan fluks dan torsi agar sesuai dengan fluks referensi dan torsi referensi berturut –
turut menggunakan two-level dan three-level hysteresis. Komparator ini digunakan untuk mendapatkan nilai kesalahan fluks pada daerah histeresisnya. Pada kesalahan fluks dihasilkan dua nilai histeresis, yaitu -1 atau 1 dan pada kesalahan torsi dihasilkan tiga nilai histeresis yaitu -1, 0, 1. Nilai kesalahan fluks dan torsi didapatkan dari persamaan :
est s ref s s est ref e T T T
ψ
ψ
ψ
= − ∆ − = ∆ (7)2.2.2 Estimator Fluks, dan Torsi
Pada pengaturan kecepatan putaran motor induksi metode DTC, estimator berfungsi sebagai pengganti sensor kecepatan dan posisi rotor. Nilai fluks dan torsi berdasarkan persamaan tegangan stator estimasi tidak memerlukan sinyal kecepatan atau posisi jika berada pada sumbu stationer. Persamaan tegangan dan arus stator berada pada sumbu-dq
berdasarkan transformasi Park. Pada metode DTC
konvensional adapun persamaan fluks stator estimasi dalam fungsi tegangan dan arus stator sebagai berikut :
(
sb sc)
ds sa qs I I I I I − = = 2 1 3 2 (8)(
)
(
b c)
dc ds c b a dc qs V V V V V V V V V − = − + = 2 1 2 1 3 2 (9)Persamaan fluks stator estimasi adalah sebagai berikut :
(
)
(
V i R)
dt dt R i V s ds ds ds s qs qs qs∫
∫
− = − = . . ψ ψ (10) atau s s s s R i V dt d . − = ψ (11) Jika Rs nilainya sangat kecil, maka Rs. is ≈ 0, sehingga :s s V dt dψ = (12) t Vs s = ∆ ∆ψ (13)
Dimana ∆t adalah periode sampling.
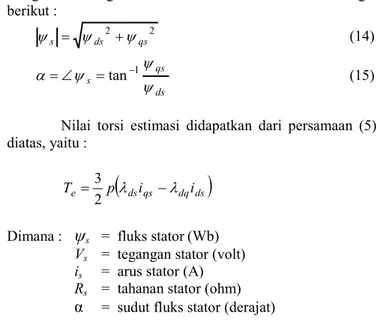
Dengan nilai magnitude dan sudut fluks stator adalah sebagai berikut : 2 2 qs ds s ψ ψ ψ = + (14) ds qs s ψ ψ ψ α=∠ =tan−1 (15)
Nilai torsi estimasi didapatkan dari persamaan (5) diatas, yaitu :
(
ds qs dq ds)
e p i i T = λ −λ 2 3Dimana :
ψ
s = fluks stator(Wb)Vs = tegangan stator (volt)
is = arus stator (A)
Rs = tahanan stator (ohm)
α
= sudut fluks stator (derajat)2.2.3 Switching Table
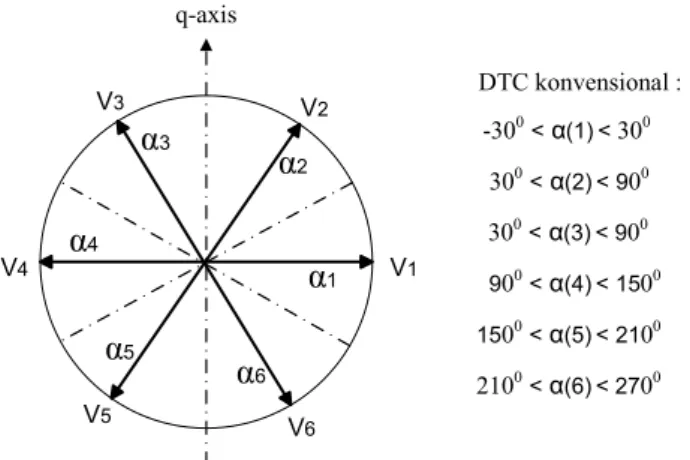
Algoritma pemilihan vektor tegangan inverter pada DTC untuk diterapkan pada motor induksi didasarkan pada nilai dari fluks dan torsi histeresis, serta nilai dari sektor fluks stator yang dinyatakan dengan
α
. Adapun aturan pemilihan tegangan pada switching table seperti ditunjukkan pada table 2.1. Keluaran dari switching table mengatur perangkat switching yang aktif pada inverter. Gambar 2.2 menunjukkan hubungan antara vektor tegangan inverter dengan sektor dari fluks stator. Vektor tegangan aktif atau bernilai bukan nol terdiri dari ܸത1 (100); ܸത2 (110); ܸത3 (010); ܸത4 (011); ܸത5 (001); ܸത6 (101). Sedangkan vektor tegangan bernilai nol adadalah ܸത0 (000); ܸത7 (111).Tabel 2.1 Switching Table dari vektor tegangan inverter
ψ Te α(1) sektor 1 α(2) sektor 2 α(3) sektor 3 α(4) sektor 4 α(1) sektor 5 α(1) sektor 6 -1 -1 ܸത5 ܸത6 ܸത1 ܸത2 ܸത3 ܸത4 0 ܸത0 ܸത7 ܸത0 ܸത7 ܸത0 ܸത7 1 ܸത3 ܸത4 ܸത5 ܸത6 ܸത1 ܸത2 1 -1 ܸത6 ܸത1 ܸത2 ܸത3 ܸത4 ܸത5 0 ܸത7 ܸത0 ܸത7 ܸത0 ܸത7 ܸത0 1 ܸത2 ܸത3 ܸത4 ܸത5 ܸത6 ܸത1
Adapun nilai sektor fluks stator didapat dari persamaan 15 diatas yaitu
ds qs s ψ ψ ψ α 1 tan− = ∠ =
V1 V2 V3 V4 V5 V6 q-axis
α
1α
6α
3α
5α
4α
2 DTC konvensional : -300<α(1) < 300 300<α(2) < 900 300<α(3) < 900 900 <α(4) < 1500 1500<α(5) < 2100 2100 <α(6) < 2700Gambar 2.2 Vektor tegangan inverter dan sektor switching fluks stator pada DTC konvensional
3. PERANCANGAN SISTEM
Motor induksi yang digunakan dalam perancangan ini adalah motor induksi jenis rotor sangkar (squirrel-cage) hubungan bintang, Y . Dimana dari motor induksi ini dapat kita ketahui besar tegangan atau arus tiap fasanya. Keluaran yang dihasilkan dari motor induski tiga fasa ini terdiri dari sistem elektrik yaitu nilai fluks stator dan torsi elektromagnetis dan sistem mekanis yaitu kecepatan putaran rotor. Pada perancangan simulasi DTC ini menggunakan motor induksi tenaga 10 HP, 380 V, 60 Hz dan 200 HP, 460 V, 60 Hz . Adapun parameter – parameter motor induksi (didapat dari paper refrensi) yang digunakan dalam simulasi ini adalah sebagai berikut :
Tabel 3.1 Parameter – parameter motor induksi 10 HP dan 200 HP
No. Nama 10 HP 20 HP
1. Jumlah pasang kutub 2 2
2. Tahanan stator (ohm) 0.7384 0.01485
3. Tahanan rotor (ohm) 0.451 0.009295
4. Induktansi stator dan
rotor (mH) 3.045 0.3207 5. Induktansi magnetic (mH) 2.956 0.3085 6. Momen inersia (kg.m2) 0.08 5.2 7. Koefisien redaman (N.m.s) 0.00315884 0.08
Berdasarkan parameter motor induksi yang ada diatas dan persamaan – persamaan pada bab sebelumnya. Nilai kecepatan stator motor, fluks stator, torsi dan kecepatan putaran rotor dapat ditentukan. Kecepatan stator motor jenis 10 HP dan 200 HP, berdasarkan persamaan 2.1 memilki nilai sebagai berikut : p f Ns =60. 2 60 . 60 = s N rpm Ns =1800
3.2 Perancangan DTC pada program Matlab
Dalam mengembangkan model simulasi Direct Torque Control (DTC) menggunakan program simulasi Matlab masukan yang digunakan adalah fluks dan torsi acuan. Nilai acuan fluks adalah 1 Wb dan nilai acuan torsi adalah 40 Nm untuk motor induksi 10 HP . Dan nilai acuan fluks adalah 1 Wb dan nilai acuan torsi adalah 400 Nm untuk motor induksi 200 HP Cara kerja metode DTC adalah dengan mempertahankan keluaran fluks dan torsi agar sesuai dengan referensi yang diberikan. Adapun bagian – bagian yang dirancang pada metode DTC ini adalah komparator, estimator, sektor sudut fluks stator, dan switching table dengan menggunakan persamaan – persamaan dan algoritma seperti yang telah dijelaskan pada bagian teori penunjang.
Gambar 3.1 Simulasi DTC pada motor induksi
4. HASIL SIMULASI DAN ANALISIS
Berdasarkan teori penunjang dan hasil perancangan yang ada pada bagian sebelumnya, maka bisa dilakukan pengukuran sistem secara closed loop. Pengukuran dilakukan pada motor induksi tipe 10 HP dan 200 HP dengan keadaan tanpa beban dan berbeban.
4.1 Pengujian Sistem Untuk Keadaan Beban Nol
Pada pengukuran yang pertama ini dilakukan dengan kondisi sistem DTC tanpa beban dengan nilai acuan fluks stator adalah 1 Wb, dan nilai acuan torsi 40 Nm pada motor 10 HP. Sedangkan acuan fluks dan torsi pada moto
200 HP adalah 1 Wb dan 400 Nm. Adapun grafik respon kecepatan sebagai beikut :
Gambar 4.1 Respon kecepatan pada motor 10 HP tanpa beban
Adapun respon kecepatan diatas memiliki
karakteristik sebagai berikut : 1. Time constant (τ) τ = t ,saat ω = 0.632 x 1710 = 1080.72 rpm τ = 0.24 detik 2. Delay time (td) td = τ ln 2 = 0.166 detik 3. Settling time (ts) ts (0.5%) = 5τ = 1.2 detik ts (2%) = 4τ = 0.96 detik ts (5%) = 3τ = 0.72 detik 4. Delay time (td) td = τ ln 2 = 0.166 detik 5. Nilai steady state = 1710 rpm
Gambar 4.2 Respon kecepatan pada motor 200 HP tanpa beban
Adapun respon kecepatan diatas memiliki
karakteristik sebagai berikut : 1. Time constant (τ) τ = t ,saat ω = 0.632 x 1700 = 1074.4 rpm τ = 1.4 detik 2. Delay time (td) td = τ ln 2 = 0.97 detik 3. Settling time (ts) ts (0.5%) = 5τ = 7 detik ts (2%) = 4τ = 5.6 detik ts (5%) = 3τ = 4.2 detik 4. Delay time (td) td = τ ln 2 = 0.97 detik 5. Nilai steady state = 1700 rpm
Dengan pengujian sistem tanpa beban (beban = 0), torsi awal yang diperlukan untuk menggerakkan motor sangatlah besar, mencapai 5 sampai 6 kali dari torsi saat keadaan tunak yaitu 50 Nm untuk motor 10 HP dan 400 Nm untuk motor 200 HP. Hal ini terjadi karena pada starting awal arus stator motor yang dibangkitkan sangatlah besar dibanding arus nominal. Arus dan torsi memiliki nilai yang sebanding sesuai persamaan torsi pada motor induksi.
Gambar 4.3 Respon torsi pada motor 10 HP tanpa beban
Gambar 4.4 Respon torsi pada motor 200 HP tanpa beban Dari gambar 4.3 dan gambar 4.4 terlihat bahwa pada mulanya respon torsi masih bernilai 0. Lalu kemudian pada sesaat kemudian dan seterusnya torsi estimasi terus meningkat dan bernilai pada kisaran 40 Nm dan 400 Nm untuk mengikuti torsi referensi yang diberikan. Hal ini disebabkan karena adanya percepatan rotor pengaruh dari momen inersia.
Sedangkan pada keadaan tunak, karena sistem di operasikan tanpa beban maka torsi elektromagnetis memiliki nilai antara 10 Nm sampai 10 Nm untuk motor 10 HP dan -100 Nm sampai dengan -100 Nm untuk motor 200 HP. Hal
0 0.2 0.4 0.6 0.8 1 0 200 400 600 800 1000 1200 1400 1600 1800 waktu(detik) K e c e p a ta n ( rp m ) 0 0.5 1 1.5 2 2.5 3 -200 0 200 400 600 800 1000 1200 1400 1600 1800 waktu (detik) K e c e p a ta n ( rp m ) 0 0.2 0.4 0.6 0.8 1 -10 0 10 20 30 40 50 60 waktu (detik) T o rs i (N m ) 0 0.5 1 1.5 2 2.5 3 -300 -200 -100 0 100 200 300 400 500 waktu (detik) T o rs i (N m )
tersebut menandakan bahwa walaupun tanpa beban, torsi elektromagnetis tidak benar – benar bernilai nol.
4.2 Pengujian Sistem Untuk Keadaan Berbeban
Pada pengukuran ini dilakukan dengan kondisi sistem dengan beban 25 Nm pada saat t = 0,6 detik dan 300 Nm pada saat t = 3 detik dengan nilai acuan fluks stator adalah 1 Wb, dan nilai acuan torsi 40 Nm pada motor 10 HP dan 1 Wb dan 400 Nm pada motor 200 HP.
Gambar 4.5 Respon kecepatan motor 10 HP untuk beban 20 Nm
Gambar 4.6 Respon kecepatan motor 200 HP beban 250 Nm
Gambar 4.7 Respon torsi motor 10 HP untuk beban 20 Nm
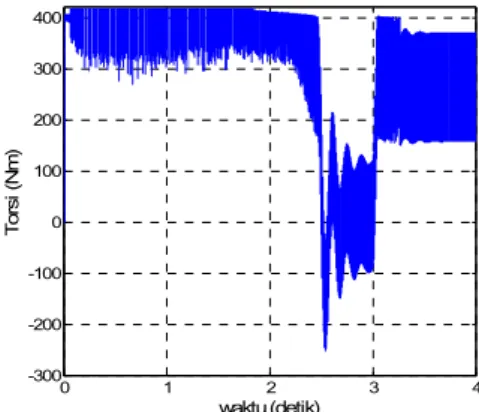
Gambar 4.8 Respon torsi motor 200 HP untuk beban 250 Nm Dari gambar 4.5 tampak bahwa ketika motor 10 HP diberikan beban 20 Nm keadaan tunak dari kecepatan turun menjadi 1650 rpm. Sedangkan pada motor 200 HP pada kondisi berbeban penurunan kecepatan putaran rotor tidak terlalu besar. Hal ini dikarenakan beban atau gangguan yang diberikan pada motor masih dalam kondisi normal. Respon torsi pada gambar 4.7 dan gambar 4.8 juga memperlihatkan karakteristik yang sama yaitu mengikuti torsi acuan dengan tetap memiliki ripple. Dengan ripple pada motor 10 HP adalah 10 Nm dan pada 200 HP adalah 150 Nm.
5. KESIMPULAN
Pengaturan kecepatan metode DTC pada motor induksi daya 10 HP memberikan respon kecepatan yang cukup baik karena cepat mencapai keadaan tunak dengan nilai time constant 0.2 detik, waktu tunda 0.0243 detik dan kecepatan keadaan tunak pada 1710 rpm. Nilai kesalahan keadaan tunak dari kecepatan yang dihasilkan juga tidak terlalu besar. Pada motor induksi 200 HP nilai time constant 1.4 detik, waktu tunda 0.97 detik dengan keadaan tunak pada kecepatan adalah 1700 rpm.
Respon torsi yang dihasilkan dari percobaan memperlihatkan bahwa respon torsi yang idhasilkan dapat mengikuti torsi acuan yang diberikan. Pada motor 10 HP respon torsi memiliki daerah ripple mencapai 10 Nm. Ketika kecepatan putaran motor mencapai keadaan tunak maka respon torsipun memiliki keadaan tunak pada 0 Nm namun tetap ada ripple. Sedangkan pada motor induksi 200 HP respon torsi memiliki daerah ripple yang besar yaitu 150 Nm.
DAFTAR PUSTAKA
[1] Wahab Abdul H.F dan Sanusi H., Simulink Model of
Direct Torque Control of Induction Machine,
American Journal of Applied Science, 2008.
[2] Pujol Arias Antoni, Thesis: Improvement In Direct
Torque Control of Induction Motor., Nopember,
2000.
[3] Andrzej M. Trzynadlowski. Control of Induction
Motor. San Diego, USA : Academic Press. 2001.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 0 200 400 600 800 1000 1200 1400 1600 1800 waktu (detik) K e c e p a ta n ( rp m ) 0 1 2 3 4 -200 0 200 400 600 800 1000 1200 1400 1600 1800 waktu (detik) K e c e p a ta n ( rp m ) 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 -10 0 10 20 30 40 50 60 waktu (detik) T o rs i (N m ) 0 1 2 3 4 -300 -200 -100 0 100 200 300 400 waktu (detik) T o rs i (N m )
[4] Toufuti Riad, Meziane Salima, dan Benalla Hocine,
Direct Torque Control Strategy of Induction Motor,
Acta Electrotechnica et Informatica, No.1, Vol.7, 2007 [5] Hughes Austin. Electric Motors And Drives :
Fundamentals, Types and Applications, Third Edition, Elsevier Ltd., 2006
[6] Krause.P.C ” Analysis of Electrica Machinary”, Mc. Graw Hill, 1987.
DAFTAR RIWAYAT HIDUP
Panji Kurniawan dilahirkan di
kota Bandar Lampung pada
tanggal 1 Desember 1987. Anak ketiga dari pasangan suami – istri
Sumardji, BA dengan Sri
Handayati, SH bertempat tinggal di Jl.Kopi Utara III No. 110, Bandar Lampung. Hobi penulis adalah sepakbola, browing internet dan membaca. Penulis dapat dihubungi melalui email [email protected]