PEMETAAN PERMUKAAN TANAH DI BAWAH FLUIDA MENGGUNAKAN SENSOR ULTRASONIK
TUGAS AKHIR
Disusun untuk memenuhi syarat kelulusan
pada Program Studi Sistem Komputer Strata Satu di Jurusan Teknik Komputer
Oleh :
Indra Firmansyah 10203026
Pembimbing :
Usep Mohamad Ishaq, M.Si
Yeffry Handoko Putra, M.T
JURUSAN TEKNIK KOMPUTER
FAKULTAS TEKNIK DAN ILMU KOMPUTER UNIVERSITAS KOMPUTER INDONESIA
KATA PENGANTAR
Assalamualaikum Wr, Wb.
Puji syukur Alhamdulilah penulis panjatkan kehadirat Allah SWT yang senantiasa mencurahkan rahmat dan hidayat-Nya ke seluruh umat-Nya termasuk pada penulis.
Sholawat serta panjatkan untuk junjungan kita Nabi Besar Muhammad SAW. Hanya
dengan pertolongan Allah SWT sematalah penulis dapat menyelesaikan tugas akhir
yang berjudul “Pemetaan Permukaan Tanah Di Bawah Fluida Menggunakan Sensor
Ultrasonik”.
Adapun tugas akhir ini disusun sebagai salah satu syarat bagi penulis untuk
menyelesaikan studinya pada Jurusan Teknik Komputer Universitas Komputer
Indonesia.
Dengan keterbatasan kemampuan dan pengetahuan yang ada penulis tidak akan
dapat menyelesaikan tugas akhir ini tanpa peran serta pihak lain. Oleh karena itu
ijinkanlah penulis untuk menyampaikan ucapan terima kasih yang sebesar-besarnya
kepada :
1. Wendi Zarman, M.Si., selaku Ketua Jurusan Teknik Komputer Universitas
Komputer Indonesia.
2. Usep Mohamad Ishaq, M.Si., selaku dosen pembimbing I.
3. Yeffry Handoko Putra, M.T., selaku dosen pembimbing II.
4. Sri Nurhayati, S.Si., M.T., selaku dosen wali.
5. Orang Tua tercinta yang selalu mendorong dan memberikan motivasi sehingga
penulis dapat menyelesaikan tugas akhir ini.
6. Kakak dan Adikku yang telah banyak mendoakan penulis dalam menyelesaikan
Tugas Akhir ini.
7. Terima kasih banyak buat Ridwan yang udah ngasih pinjam komputernya. Juga
dd vina untuk Hpnya dan buat apunk makasih fiestanya.
8. Seluruh anak-anak Teknik Komputer angkatan 2003 terutama kelas TK-1 yang
9. Untuk anak-anak kost 16 baik untuk penghuni lama maupun untuk penghuni
baru, terima kasih banyak.
10. Semua pihak yang telah banyak membantu dan tidak dapat penulis sebutkan satu
persatu, terima kasih banyak atas bantuannya.
Dalam pengerjaan tugas akhir ini, penulis telah berusaha semaksimal mungkin,
walaupun demikian menyadari bahwa tugas akhir ini masih jauh dari sempurna. Untuk
itu penulis akan selalu menerima dengan tangan terbuka segala masukan yang
diberikan. Semoga tugas akhir ini dapat bermanfaat bagi kita semua untuk menambah
ilmu pengetahuan. Semoga untuk mahasiswa berikutnya dapat menyusun tugas akhir
lebih baik lagi.
Bandung, 09 Februari 2009
ABSTRACT
This final project writer try to design and realize a instrument which can map a land surface under fluid use the ultrasonic wave. The instrument made consisted of by the LV-MaxSonar EZ1 as sensor, PC as processor of data and serial port as interface between appliance by PC. Basically this instrument will measure distance or depth a surface, where does measurement done at some points so that result from the changeable measurement by PC. Mapping which in create is a contour map, this contour cartography besides using visual basic 6.0 program will also apply surfer 8 program.
ABSTRAK
Pada tugas akhir ini penulis mencoba merancang dan merealisasikan suatu alat yang dapat memetakan suatu permukaan tanah yang berada di bawah fluida dengan menggunakan gelombang ultrasonik. Alat yang dibuat terdiri dari LV-MaxSonar EZ1 sebagai sensor, PC sebagai pengolah data dan port serial sebagai antarmuka antara alat dengan PC. Pada dasarnya alat ini akan mengukur jarak atau kedalaman suatu permukaan, dimana pengukuran dilakukan pada beberapa titik sehingga hasil dari pengukuran tersebut dapat diolah oleh PC. Pemetaan yang di buat merupakan sebuah peta kontur, pembuatan peta kontur ini selain menggunakan program visual basic 6.0 juga akan menggunakan program surfer 8.
HALAMAN PENGESAHAN
PEMETAAN PERMUKAAN TANAH DI BAWAH FLUIDA MENGGUNAKAN SENSOR ULTRASONIK
Disusun untuk memenuhi syarat kelulusan
Pada Program Studi Sistem Komputer Strata Satu di Jurusan Teknik Komputer
Oleh :
Indra Firmansyah 10203026
Bandung, 09 Februari 2009
Menyetujui,
Pembimbing I Pembimbing II
Usep Mohamad Ishaq, Msi. Yeffry Handoko Putra, M.T. NIP.4127.70.05.008 NIP. 4127.70.05.017
Mengetahui,
Ketua Jurusan Teknik Komputer
Wendi Zarman, M.Si
DAFTAR ISI
BAB I PENDAHULUAN 1.1 Latar Belakang ... 1
2.5.1 Penyearah Setengah Gelombang ... 15
2.5.2 Penyearah Gelombang Penuh Sistem CT ... 15
2.5.3 Penyearah Gelombang Penuh Sistem Jembatan ... 15
BAB III PERANCANGAN SISTEM
4.1.1 Kondisi pertama (tanpa menggunakan fluida) ... 40
4.1.1.1 Pengujian pada permukaan satu ... 40
4.1.1.2 Pengujian pada permukaan dua ... 45
4.1.1.3 Pengujian pada permukaan tiga... 49
DAFTAR GAMBAR
Halaman
Gambar 2.1 Cara transmisi langsung ... 6
Gambar 2.2 Cara transmisi tidak langsung ... 6
Gambar 2.3 Pengiriman data serial ... 8
Gambar 2.4 Konektor serial DB 9 pada bagian belakang CPU ... 8
Gambar 2.5 Sensor Ultrasonik LV-MaxSonar EZ-1 ... 14
Gambar 2.6 Penyearah setengah gelombang ... 15
Gambar 2.7 Penyearah sistem CT ... 15
Gambar 2.8 Penyearah sistem jembatan ... 16
Gambar 2.9 Tampilan awal visual basic 6.0 ... 17
Gambar 3.2 Proses pemetaan permukaan tanah ... 24
Gambar 3.3 Proses pengukuran pada mode manual (dilihat dari atas) ... 25
Gambar 3.4 Proses pembuatan peta pada SURFER 8 ... 26
Gambar 3.5 Pin-pin LV-MaxSonar EZ-1 yang digunakan ... 27
Gambar 3.6 Konfigurasi DB 9 ... 28
Gambar 3.7 Rangkaian catu daya ... 28
Gambar 3.8 Kondensator elektrolit ... 29
Gambar 3.9 IC LM 7805 ... 29
Gambar 3.10 Flowchart program bagian 1 ... 30
Gambar 3.11 Flowchart program bagian 2 ... 32
Gambar 3.12 Flowchart program bagian 3 ... 34
Gambar 3.15 Form utama mode otomatis ... 37
Gambar 4.10 Hasil pemetaan dengan interval 5 cm (SURFER 8) ... 43
Gambar 4.11 Hasil pemetaan pada baris ke 1 (VB) ... 44
Gambar 4.12 Hasil pemetaan pada baris ke 3 (VB) ... 44
Gambar 4.13 Hasil pemetaan pada baris ke 5 (VB) ... 44
Gambar 4.14 Bentuk permukaan dua ... 45
Gambar 4.15 Hasil pemetaan dengan interval 1 cm (SURFER 8) ... 45
Gambar 4.16 Hasil pemetaan dengan interval 3 cm (SURFER 8) ... 45
Gambar 4.17 Hasil pemetaan dengan interval 5 cm (SURFER 8) ... 46
Gambar 4.18 Hasil pemetaan dengan interval 1 cm (VB) ... 46
Gambar 4.19 Hasil pemetaan dengan interval 1 cm (SURFER 8) ... 46
Gambar 4.20 Hasil pemetaan dengan interval 3 cm (VB) ... 47
Gambar 4.21 Hasil pemetaan dengan interval 3 cm (SURFER 8) ... 47
Gambar 4.22 Hasil pemetaan dengan interval 5 cm (VB) ... 47
Gambar 4.23 Hasil pemetaan dengan interval 5 cm (SURFER 8) ... 48
Gambar 4.24 Hasil pemetaan pada baris ke 1 (VB) ... 48
Gambar 4.25 Hasil pemetaan pada baris ke 3 (VB) ... 48
Gambar 4.26 Hasil pemetaan pada baris ke 5 (VB) ... 49
Gambar 4.27 Bentuk permukaan tiga dengan kemiringan 10o ... 49
Gambar 4.28 Hasil pemetaan dengan menggunakan penggaris (MS. Exccel) . 50 Gambar 4.29 Hasil pemetaan mode manual (VB) ... 50
Gambar 4.31 Bentuk permukaan tiga dengan kemiringan 20o ... 51
Gambar 4.32 Hasil pemetaan dengan menggunakan penggaris (MS. Exccel) . 51 Gambar 4.33 Hasil pemetaan mode manual (VB) ... 51
Gambar 4.34 Hasil pemetaan mode otomatis (VB) ... 52
Gambar 4.35 Bentuk geelombang ultrasonik yang dipancarkan ... 59
Gambar 4.36 Contoh daerah rentan error ... 60
Gamabr 4.37 Perbandingan hasil pemetaan permukaan tiga ... 61
DAFTAR TABEL
Halaman
Tabel 2.1 konfigurasi pin dan mana sinyal konektor serial DB 9 ... 9
Tabel 2.2 Nama register yang digunakan beserta alamatnya ... 10
Tabel 2.3 Angka pembagi clok pada IC UART ... 10
Tabel 2.4 Rincian bit pada interrupt enable register ... 11
Tabel 2.5 Rincian bit pada interrupt identification register ... 11
Tabel 2.6 Rincian bit pada interrupt line control register ... 12
Tabel 2.7 Rincian bit pada interrupt modem control register ... 12
Tabel 2.8 Rincian bit pada interrupt line status register ... 13
Tabel 2.9 Rincian bit pada interrupt modem status register ... 13
Tabel 2.10 Alamat dan lokal bit pada register UART ... 21
Tabel 2.11 Nilai-nilai properti even komunikasi pada CommEvent ... 22
Tabel 2.12 Nilai-nilai properti even error pada CommEvent ... 23
Tabel 3.1 Penjelasan flowchart program bagian 1 ... 31
Tabel 3.2 Penjelasan flowchart program bagian 2 ... 33
Tabel 3.3 Penjelasan flowchart program bagian 3 ... 35
DAFTAR LAMPIRAN
1. Lampiran A – Data Pengukuran
2. Lampiran B – Skema Rangkaian
3. Lampiran C – Listing Program
BAB I PENDAHULUAN
1.1 Latar Belakang
Perkembangan teknologi saat ini dari tahun ke tahun semakin berkembang
terutama dalam dunia IT (Information Technology). Perkembangan dunia IT sangat
besar pengaruhnya dalam aspek kehidupan. Misalnya banyak bermunculan
teknologi-teknologi yang dapat membantu aktivitas manusia. Salah satunya adalah dengan
ditemukannya gelombang ultrasonik. Sekarang ini gelombang ultrasonik banyak sekali
digunakan dalam berbagai bidang, diantaranya bidang medis, NDT (Non-Destructive
Test), SONAR (Sound Navigation and Ranging), dan masih banyak lagi aplikasinya di
berbagai bidang.
Aplikasi ultrasonik yang digunakan dalam tugas akhir ini pada dasarnya adalah
pengukuran jarak dari permukaan fluida sampai ke dasar atau mengukur kedalamannya,
dimana hasil pengukuran tersebut kemudian akan diolah sehingga dapat memetakan
permukaan dasarnya. Fluida yang digunakan adalah minyak pelumas. Pemetaan yang
dibuat merupakan peta kontur, yaitu peta yang menggambarkan ketinggian permukaan
bumi atau permukaan tanah di bawah fluida. Pembuatan peta ini menggunakan garis
kontur (countur line), yaitu garis khayal yang menghubungkan tempat-tempat yang
mempunyai ketinggian yang sama.
1.2 Maksud dan Tujuan
Maksud dari penulisan tugas akhir ini adalah merancang dan membuat suatu alat
yang dapat memetakan permukaan tanah di bawah fluida dan menampilkannya pada
komputer.
Adapun tujuan yang ingin dicapai dalam tugas akhir ini adalah membuat suatu
sistem pemetaan permukaan tanah di bawah fluida secara real time.
1.3 Batasan Masalah
Batasan masalah dari perancangan alat ini adalah :
1. Hasil dari pemetaan pada mode manual dalam bentuk 3 dimensi, sedangkan
pada mode otomatis dalam bentuk 1 dimensi.
2. Sensor ultrasonik yang digunakan adalah LV-MaxSonar EZ-1.
4. Pengambilan sampling atau data dari sensor dilakukan setiap 1 detik.
5. Uji coba dilakukan pada sebuah aquarium dengan panjang 30 cm, lebar 25 cm
dan tinggi 28 cm.
6. Alat digerakkan secara manual.
7. Antarmuka alat dengan PC menggunakan port serial.
8. Pemograman pada PC menggunakan Visual Basic 6.0.
9. Untuk menghasilkan pemetaan dalam 3 dimensi digunakan software SURFER 8.
1.4 Metodologi Penelitian
Metodologi penelitian yang digunakan adalah eksperimental dengan tahapan
sebagai berikut :
1. Studi pustaka
Metoda pengumpulan data dan bahan-bahan yang berhubungan dengan
permasalahan yang menjadi topik dalam skripsi melalui jurnal-jurnal, buku-buku
dan dari internet. Selanjutnya melakukan percobaan yang relevan dengan topik
penelitian tersebut.
2. Perancangan
Yaitu mengaplikasikan teori yang didapat dari studi pustaka dan dari hasil
bimbingan, sehingga tersusun menjadi suatu perancangan sistem untuk bagian
perangkat keras juga untuk bagian perangkat lunak.
3. Pengujian dan analisis
Merupakan metode untuk mengetahui hasil dari perancangan sistem yang telah
dibuat, apakah sudah sesuai dengan yang direncanakan atau belum. Selanjutnya
akan dilakukan pengujian, baik secara teroritis ataupun praktis dan jika terdapat
kekurangan maka akan dilakukan beberapa perbaikan sistem sehingga akhirnya
dapat diambil sebuah kesimpulan dari penelitian ini.
1.5 Sistematika Penulisan
Sistematika pembahasan dalam tugas akhir ini adalah sebagai berikut:
Bab 1 : Pendahuluan, berisi latar belakang masalah, maksud dan tujuan, batasan masalah, metodologi penelitian, serta sistematika penulisan, untuk
Bab 2 : Landasan Teori, berisi teori-teori pendukung mengenai dasar-dasar dari perangkat yang digunakan dan cara pengaplikasian pada tugas akhir ini
sehingga dapat memperjelas tentang alat yang akan dibuat.
Bab 3 : Perancangan Sistem, berisi tahap-tahap perancangan alat secara keseluruhan, baik perangkat keras atau pun perangkat lunak.
Bab 4 : Pengujian dan Analisis, berisi mengenai pengujian terhadap alat yang dibuat, pengambilan data, dan menganalisa data hasil pengukuran untuk
mengetahui keberhasilan sistem yang telah dirancang.
Bab 5 : Kesimpulan dan Saran, berisi kesimpulan yang diperoleh selama pelaksanaan tugas akhir ini dan saran mengenai hal-hal yang perlu
BAB III
PERANCANGAN SISTEM
3.1 Deskripsi 3.1.1 Diagram Blok
Alat yang dibuat terdiri dari beberapa bagian yaitu sensor, perantara (I/O) dan
personal computer (PC) termasuk didalamnya perangkat lunak dengan menggunakan
Visual Basic 6.0. Berikut ini adalah diagram blok dari alat yang akan dibuat.
Gambar 3.1. Diagram blok sistem
Sensor yang digunakan adalah sensor ultrasonik, yaitu LV-MaxSonar-EZ-1.
Karena keluaran dari sensor ini sudah berupa data serial, maka sensor bisa langsung
berkomunikasi dengan komputer yaitu dengan menggunakan port serial.
3.1.2 Prinsip Kerja
Pada dasarnya alat ini dibuat untuk bisa memetakan suatu permukaan tanah yang
berada di bawah permukaan fluida dengan menggunakan sensor ultrasonik. Alat ini
akan mengukur jarak dari permukaan fluida sampai ke dasar atau mengukur
kedalamannya. Pengukuran dilakukan pada tempat yang berbeda-beda sehingga hasil
dari pengukuran tersebut dapat diolah oleh komputer menjadi sebuah grafik. Grafik
inilah yang akan merepresentasikan permukaan tanah tersebut.
Fluida
Sensor yang digunakan dapat memperoleh data dengan cepat yaitu setiap 49 mili
detik. Karena untuk dilakukan proses pengambilan data setiap 49 mili detik itu terlalu
cepat, maka pada alat yang dibuat proses pengambilan datanya akan diset setiap 1 detik.
Proses pengukuran atau pengambilan data dapat dilakukan dengan dua mode
yaitu mode manual dan mode otomatis.
1. Mode manual
Pada mode manual, pemetaan yang dihasilkan akan berbentuk 3 dimensi.
Karena pengukuran atau pengambilan data akan dilakukan pada beberapa baris,
selain itu pada setiap barisnya juga akan dilakukan beberapa kali pengukuran,
tergantung dari rentang pengukuran yang dipilih (1 cm, 3 cm atau 5 cm). Pada mode
ini setelah tombol “Start” di klik, pengambilan data dilakukan secara manual
dengan mengklik tombol “Ambil Data” dan jika pengambilan data pada baris
tersebut sudah selesai, untuk pindah ke baris berikutnya tinggal mengklik tombol
“Next”. Sebelum dilakukan pengambilan data lagi terlebih dahulu geser posisi
relnya ke baris berikutnya. Di bawah ini adalah gambar dari proses pengukuran atau
pengambilan data mode manual.
Baris 1
Gambar 3.3. Proses pengukuran pada mode manual (dilihat dari atas)
Selain itu proses pembuatan petanya juga akan di buat dengan menggunakan
software SURFER 8. Untuk bisa di gunakan pada software SURFER 8, data hasil
pengukuran tersebut harus di export atau di transfer dulu kedalam Worksheet
Hal pertama yang dilakukan pada SURFER 8 adalah membuat data grid dengan
extention “.GRD” dengan sumber data dari Microsoft Office Excel. Dari data
tersebut bisa dibuat contur map dan wireframe map.
Gambar 3.4. Proses pembuatan peta pada SURFER 8
2. Mode otomatis
Hasil pemetaan pada mode ini tidak seperti pada mode manual, hanya akan
menghasilkan pemetaan 1 dimensi. Karena proses pengukuran atau pengambilan
datanya hanya dilakukan pada satu baris saja. Pada mode ini setelah tombol “start”
di klik pengambilan data hasil pengukuran dilakukan secara otomatis, sehingga kita
hanya tinggal menggerakkan sensornya saja. Pada mode ini proses pengambilan
datanya telah di set dilakukan setiap 1 detik sekali.
3.2 Perangkat Keras 3.2.1 Sensor
Sensor ultrasonik yang digunakan adalah LV-MaxSonar EZ-1, yang berfungsi
untuk mengukur jarak atau kedalaman suatu permukaan tanah. Sensor ini bekerja
berdasarkan waktu tempuh gelombang ultrasonik ketika melewati suatu medium.
Keluaran dari sensor ini ada tiga :
1. Serial
2. Tegangan analog
3. pulse width
Adapun cara kerja dari sensor ini adalah sebagai berikut. Pertama-tama pada 250
mili detik pertama (setelah diberi catu daya), LV-MaxSonar-EZ1 akan siap menerima
posisi high, maka MaxSonar-EZ1 akan melakukan proses kalibrasi selama 49 mili detik.
Lalu MaxSonar-EZ1 akan mengambil pembacaan jarak selama 49 mili detik lagi. Oleh
karena itu pada pembacaan pertama ini akan membutuhkan waktu sekitar 100 mili
detik. Untuk pembacaan selanjutnya hanya membutuhkan waktu 49 mili detik saja,
LV-MaxSonar-EZ1 akan memeriksa kondisi pin Rx pada akhir proses pembacaan. Data
pembacaan jarak dapat diperoleh setiap 49 mili detik.
Periode 49 mili detik ini dimulai dengan pin Rx diberi kondisi high atau open.
Setelah itu LV-MaxSonar-EZ1 akan memancarkan gelombang sonar dengan frekuensi
42 kHz, lalu pin pulse width (PW) akan di set high. Ketika obyek target terdeteksi, pin
pulse width akan low tetapi jika tidak terdeteksi target maka pin pulse width akan
berlogika high hingga 37,5 mili detik. Selama 4,7 mili detik berikutnya data serial akan
dikirimkan. Setelah itu, LV-MaxSonar-EZ1 akan mengatur tegangan analog pada pin
AN (analog output) sesuai dengan hasil pembacaan jarak.
Keluaran yang digunakan adalah keluaran serial, yaitu pada pin Tx. Berikut
adalah pin-pin yang digunakan.
Tx
Gambar 3.5. Pin-Pin LV-MaxSonar EZ-1 yang digunakan
Dimana nantinya pin Tx akan dihubungkan dengan pin 2 (Rx) pada DB 9,
sedangkan untuk pin GND dan pin Vcc (+5) akan dihubungkan dengan catu daya.
3.2.2 Interface
Agar alat dapat berkomunikasi dengan PC maka harus ada sarana interface yang
memungkinkan agar keduanya dapat saling mendukung, untuk inferfacenya sendiri
akan menggunakan port serial. Kecepatan transmisi (baud rate) yang akan digunakan
adalah 9600 (bit/detik) dengan panjang data 8 bit, tanpa paritas dan jumlah bit stop
alat yang berhubungan harus diatur pada kecepatan yang sama. Jadi, boud ratenya harus
disamakan dengan boud rate yang digunakan pada sensor.
DB 9
Rx
GND 2
5
Gambar 3.6. Konfigurasi DB 9
Komunikasi yang terjadi adalah komunikasi satu arah, yaitu komunikasi dari
sensor ke PC saja. Pada DB 9 pin yang digunakan hanya pin 2 dan pin 5, dimana pin 2
berfungsi untuk menerima data serial dari sensor sedangkan pin 5 sebagai ground.
3.2.3 Rangkaian catu daya
Bagian catu daya merupakan bagian penting bagi semua rangkaian. Tegangan
yang dibutuhkan untuk rangkaian adalah 5 Volt DC, karena sensor yang digunakan
bekerja pada level tegangan 5 Volt.
Gambar 3.7.Rangkaian catu daya
Catu daya tersebut menggunakan sebuah dioda bridge sebagai penyearah
sehingga bekerja dalam mode penyearah gelombang penuh. Transformator yang
menghilangkan ripple akibat penyearahan yang belum sempurna, dengan adanya
muatan dari elko maka ripple bisa ditutupi.
Gambar 3.8.Kondensator elektrolit
Tegangan keluaran penyearah belum bisa stabil pada satu titik yang diinginkan,
misalnya pada 5 Volt DC. Untuk mengatasi hal ini maka dibuatlah catu daya yang
dilengkapi dengan IC regulator. IC regulator yang digunakan adalah LM 7805, dimana
IC ini akan meregulasi tegangan mendekati 5 Volt DC sesuai kebutuhan rangkaian.
Gambar 3.9.IC LM7805
Tegangan keluaran dari IC ini sudah mendekati tegangan yang diinginkan
sekitar 5 Volt DC (efektifnya 4,9 Volt DC), dan sebagai indikator dilengkapi dengan
led.
3.3 Perangkat Lunak
Pada bagian perangkat lunak ini menggunakan program visual basic 6.0, berikut
adalah flowchart secara umum dari program :
LM
7805
V in
Gnd
Simpan
Tabel 3.1. Penjelasan flowchart program bagian 1
No Blok Keterangan
1 Merupakan awal program
2 Melakukan inisialisasi port serial
3 Menginputkan Kode dan Nama Peta yang akan di buat
4 Bagian ini berfungsi untuk memilih mode kerja alat. Jika nilai dari index
sama dengan “0” maka program akan loncat ke mode manual. Tetapi jika
tidak sama dengan “0” maka program akan loncat ke mode otomatis
5 Memanggil prosedur mode manual
6 Mengecek apakah jumlah data koordinat yang ada di database berjumlah
0. Jika Ya maka program akan memulai pembacaan data serial, tetapi jika
tidak program akan menghapus data koordinat dulu. Hal ini dikarenakan
data koordinat yang di simpan di database hanya bersipat sementara
7 Melakukan penghapusan data koordinat yang ada di database
8 Melakukan pembacaan data serial yang dikirim oleh sensor
9 Melakukan proses pengecekan, dimana jika jumlah data yang ada pada
buffer serial sama dengan “5” maka program akan mengambil data
tersebut. Tetapi jika tidak sama dengan “5” program akan terus
melakukan pembacaan. Ini berfungsi untuk mendeteksi apakah data yang
dikirimkan oleh sensor sudah di terima semua, dimana jumlah data yang
dikirimkan sensor adalah 5 buah karakter ASCII.
10 Melakukan pengambilan data pada buffer serial dan menyimpannya pada
variable “d_cm”
11 Menampilkan data yang ada di variable “d_cm” pada label
“Lb2Jarak_M” dan pada MSChart “MSChart1” sehingga membentuk
grafik
Tabel 3.2. Penjelasan flowchart program bagian 2
No Blok Keterangan
13 Melakukan proses pengecekan pada timer “Timer2” apakah sudah 1 detik.
Jika sudah maka akan mengosongkan buffer, tetapi jika belum akan terus
menunggu timer sampai 1 detik
14 Mengosongkan buffer serial supaya bisa menerima data serial lagi
15 Melakukan proses pengecekan apakah akan dilakukan pengambilan data
lagi. Jika “ya” maka program akan mengecek apakah data yang akan di
ambil untuk baris yang baru, tetapi jika “tidak” maka program akan
selesai
16 Melakukan proses pengecekan apakah akan dilakukan pengukuran pada
baris yang baru. Jika “ya” maka nilai dari variable “b” di tambah 1, hal ini
mengindikasikan bahwa proses pengukuran pada baris pertama telah
selesai dan akan dilakukan pengukuran pada baris berikutnya. Tetapi jika
“tidak” program akan melakukan proses pembacaan data serial lagi,
artinya proses pengukuran untuk baris sebelumnya belum selesai
17 Nilai dari variabel “b” akan di tambah 1
18 Melakukan proses pengecekan apakah nilai dari variabel “b” lebih kecil
dari 12. Jika “ya” maka program akan melakukan pembacaan data serial,
tetapi jika “tidak” maka proses pengukuran untuk semua baris telah
selesai dilakukan
19 Pengukuran telah selesai dilakukan
20 Apakah data hasil pengukuran yang telah di simpan di databese akan
langsung di export atau di transfer ke dalam excel. Jika ya maka program
akan memangggil prosedure export dan jika tidak program akan berhenti.
21 Melakukan transfer data koordinat yang ada di dalam database ke dalam
excel
22 Akan membuka program Surfer 8
Buffer
Tabel 3.4. Penjelasan flowchart program bagian 3
No Blok Keterangan
24 Memanggil prosedur mode otomatis
25 Melakukan pembacaan data serial yang dikirim oleh sensor
26 Melakukan proses pengecekan, dimana jika jumlah data yang ada pada
buffer serial sama dengan “5” maka program akan mengambil data
tersebut. Tetapi jika tidak sama dengan “5” program akan terus
melakukan pembacaan. Ini berfungsi untuk mendeteksi apakah data yang
dikirimkan oleh sensor sudah di terima semua, dimana jumlah data yang
dikirimkan sensor adalah 5 buah karakter ASCII.
27 Melakukan pengambilan data pada buffer serial dan menyimpannya pada
variable “d_cm”.
28 Melakukan proses pengecekan pada timer “Timer1” apakah sudah 1 detik.
Jika sudah maka program akan menampilkan data yang ada di variable
“d_cm”, tetapi jika belum akan terus menunggu timer sampai 1 detik
29 Menampilkan data yang ada di variable “d_cm” pada label “Lb2Jarak_O”
dan pada MSChart “MSChart1” sehingga membentuk grafik
30 Menyimpan data yang ada pada varibel “d_cm” ke database
31 Melakukan proses pengecekan pada timer “Timer2” apakah sudah 1 detik.
Jika sudah maka akan mengosongkan buffer, tetapi jika belum akan terus
menunggu timer sampai 1 detik
32 Mengosongkan buffer serial supaya bisa menerima data serial lagi
33 Melakukan proses pengecekan apakah akan dilakukan pengambilan data
lagi. Jika “ya” maka program akan melakukan pembacaan data serial,
tetapi jika “tidak” maka program akan selesai
34 Merupakan akhir program
Perancangan pada Visual Basic 6.0
1. Perancangan form loading
Form ini adalah form yang pertama kali muncul ketika program di jalankan.
Proses yang terjadi disini adalah meloading form menu utama. Berikut adalah
Gambar 3.13. Form loading
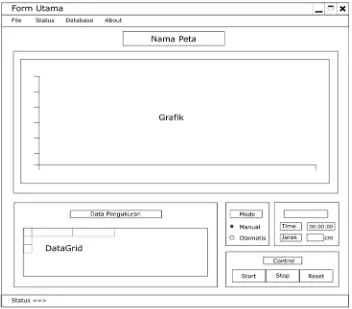
2. Perancangan Menu Utama
Pada form menu utama proses pengukuran dilakukan, disini akan ditampilkan
data-data hasil pengukuran tersebut dalam bentuk grafik dan tabel. Program yang
akan di buat terdiri dari dua mode yaitu mode manual dan otomatis, berikut adalah
rancangan dari menu utama.
Gambar 3.15. Form utama mode otomatis
Keterangan:
• File – New Map, untuk membuat peta baru.
File – Export To Excel, berfungsi untuk mentransfer data koordinat yang ada di
database ke dalam worksheet document.
File – Exit, untuk menutup program.
• Status – Connect, untuk melakukan koneksi.
Status – Disconnect, untuk memutus koneksi.
• Database
• About
3. Perancangan form new map
Sebelum kita melakukan proses pembuatan peta terlebih dahulu kita inputkan
kode dan nama peta yang akan di buat. Berikut adalah rancangan dari form new
Gambar 3.16. Form new map
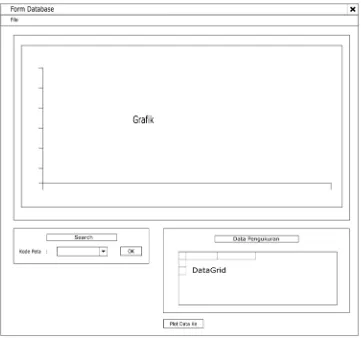
4. Perancangan form database
Pada form database kita bisa melakukan pencarian terhadap peta-peta yang telah
kita buat. Berikut adalah rancangan dari form database.
Gambar 3.17. Form database
Keterangan :
5. Perancangan form about
Berikut adalah perancangan dari form about
BAB IV
PENGUJIAN DAN ANALISIS
4.1 Pengujian Alat
Pengujian akan dilakukan pada tiga bentuk permukaan yang berbeda.
Pertama-tama akan dilakukan pengujian secara manual dengan menggunakan penggaris,
kemudian dilakukan pengujian dengan alat. Untuk setiap permukaan, pengujian akan
dilakukan dalam 2 kondisi, yang pertama tanpa menggunakan fluida dan yang kedua
dengan menggunakan fluida. Dimana untuk permukaan satu dan dua dalam setiap
kondisinya akan dilakukan 3 kali percobaan dengan interval pengukuran yang berbeda
(mode manual) dan baris yang berbeda (mode otomatis). Sedangkan untuk permukaan
tiga dalam setiap kondisinya hanya akan dilakukan satu kali percobaan dengan interval
pengukuran 1 cm (mode manual).
4.1.1 Kondisi pertama (tanpa menggunakan fluida) 4.1.1.1 Pengujian Pada Permukaan Satu
Ini adalah bentuk dari permukaan yang akan di uji:
1. Pengujian secara manual dengan menggunakan penggaris
Percobaan dengan interval pengukuran 1 cm
Gambar 4.2. Hasil pemetaan dengan interval 1 cm (SURFER 8)
Percobaan dengan interval pengukuran 3 cm
Gambar 4.3. Hasil pemetaan dengan interval 3 cm (SURFER 8)
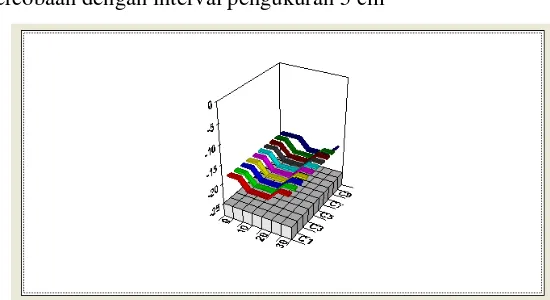
Percobaan dengan interval pengukuran 5 cm
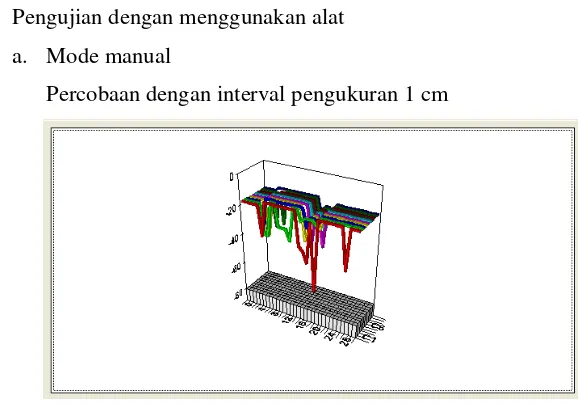
2. Pengujian dengan menggunakan alat
a. Mode manual
Percobaan dengan interval pengukuran 1 cm
Gambar 4.5. Hasil pemetaan dengan interval 1 cm (VB)
Gambar 4.6. Hasil pemetaan dengan interval 1 cm (SURFER 8)
Percobaan dengan interval pengukuran 3 cm
Gambar 4.8. Hasil pemetaan dengan interval 3 cm (SURFER 8)
Percobaan dengan interval pengukuran 5 cm
Gambar 4.9. Hasil pemetaan dengan interval 5 cm (VB)
b. Made otomatis
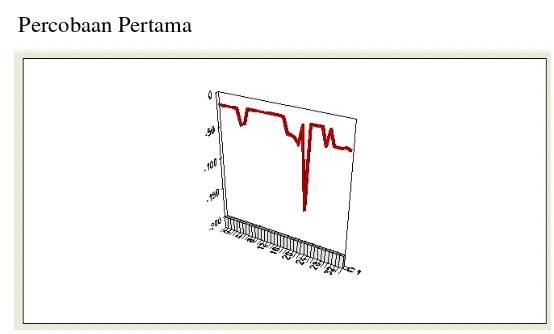
Percobaan Pertama
Gambar 4.11. Hasil pemetaan pada baris ke 1 (VB)
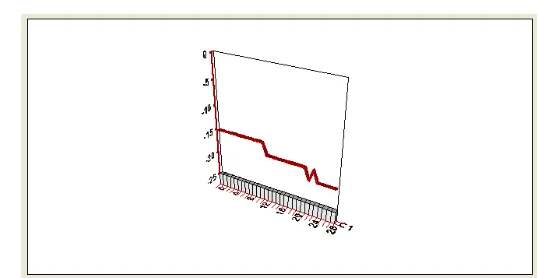
Percobaan Kedua
Gambar 4.12. Hasil pemetaan pada baris ke 3 (VB)
Percobaan Ketiga
4.1.1.2Pengujian Pada Permukaan Dua
Ini adalah bentuk dari permukaan yang akan di uji
Gambar 4.14. Bentuk permukaan dua
1. Pengujian secara manual dengan menggunakan penggaris
Percobaan dengan interval pengukuran 1 cm
Gambar 4.15. Hasil pemetaan dengan interval 1 cm (SURFER 8)
Percobaan dengan interval pengukuran 3 cm
Percobaan dengan interval pengukuran 5 cm
Gambar 4.17. Hasil pemetaan dengan interval 5 cm (SURFER 8)
2. Pengujian dengan menggunakan alat
a. Mode manual
Percobaan dengan interval pengukuran 1 cm
Gambar 4.18. Hasil pemetaan dengan interval 1 cm (VB)
Percobaan dengan interval pengukuran 3 cm
Gambar 4.20. Hasil pemetaan dengan interval 3 cm (VB)
Gambar 4.21. Hasil pemetaan dengan interval 3 cm (SURFER 8)
Percobaan dengan interval pengukuran 5 cm
Gambar 4.23. Hasil pemetaan dengan interval 5 cm (SURFER 8)
b. Mode otomatis
Percobaan Pertama
Gambar 4.24. Hasil pemetaan pada baris ke 1 (VB)
Percobaan Kedua
Percobaan Ketiga
Gambar 4.26. Hasil pemetaan pada baris 5 (VB)
4.1.1.3Pengujian pada permukaan tiga
Pengujian pada permukaan tiga tujuannya adalah untuk menguji apakah alat
yang dibuat dapat memetakan suatu bidang atau permukaan miring. Dimana kemiringan
yang diuji adalah 10o dan 20o. Cara pengujian pada permukaan tiga berbeda dengan cara
pada pengujian permukaan sebelumnya (permukaan satu dan dua). Pada permukaan tiga
pengujian hanya dilakukan pada satu baris saja untuk setiap modenya. Sehingga
pemetaan yang dihasilkan hanya dalam 1 dimensi.
Kemiringan 10o
Ini adalah bentuk permukaan yang akan di uji
1. Pengujian secara manual dengan menggunakan penggaris
Gambar 4.28. Hasil pemetaan dengan menggunakan penggaris (MS.Excel)
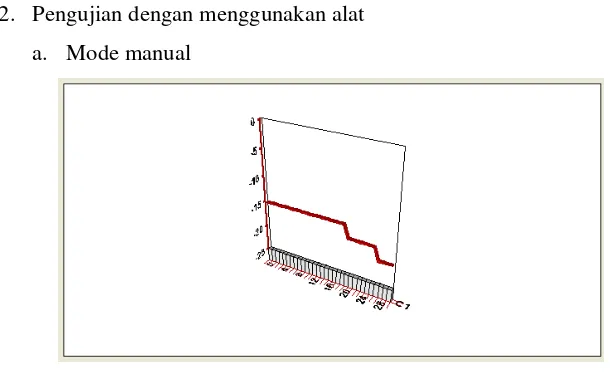
2. Pengujian dengan menggunakan alat
a. Mode manual
Gambar 4.29. Hasil pemetaan mode manual (VB)
b. Mode otomatis
Kemiringan 20o
Ini adalah bentuk permukaan yang akan di uji
Gambar 4.31. Bentuk permukaan tiga dengan kemiringan 20o
1. Pengujian secara manual dengan menggunakan penggaris
Gambar 4.32. Hasil pemetaan dengan menggunakan penggaris (MS.Excel)
2. Pengujian dengan menggunakan alat
a. Mode manual
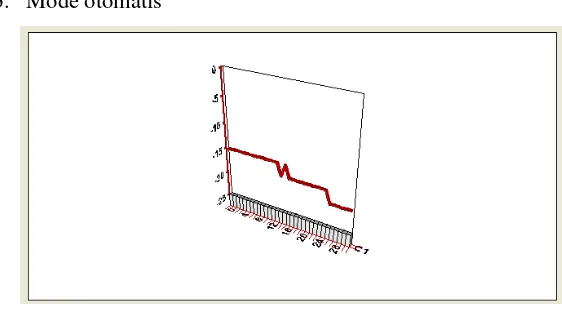
b. Mode otomatis
Gambar 4.34. Hasil pemetaan mode otomatis (VB)
4.1.2 Kondisi kedua (menggunakan fluida)
Pada proses pengukuran dilakukan posisi dari sensor harus berada didalam
fluida, yaitu dengan mencelupkan sensor ultrasonik pada jarak ± 1 cm. Hal tersebut
dilakukan karena jika sensor diletakan di atas fluida maka data yang didapat tidak
akurat, karena gelombang ultrasonik akan segera dipantulkan jika menyentuh
permukaan fluida padahal yang diharapkan adalah gelombang ultrasonik menyerap
terlebih dahulu didalam fluida baru kemudian gelombang ultrasoniknya dipantulkan.
Ketika proses pengukuran dilakukan, pada saat posisi sensor menyentuh
permukaan fluida data atau jarak yang didapat adalah 15,24 cm atau 6 inci. Hal ini
dikarenakan 15,24 cm atau 6 inci adalah jarak minimum yang dapat di deteksi oleh
sensor. Jadi, walaupun jarak sebenarnya dari sensor ke permukaan fluida berada di
bawah 15, 24 cm data atau jarak yang didapat tetap 15,24 cm atau 6 inci. Tetapi ketika
posisi dari sensor di celupkan kedalam fluida data atau jarak yang didapat menjadi
645,16 cm atau 254 inci. Ada kemungkinan fluida yang digunakan yaitu minyak
pelumas mengotori bagian dalam sensor, sehingga data atau jarak yang didapat menjadi
tidak akurat.
Kemudian dilakukan pengujian lagi dengan kondisi tanpa menggunakan fluida.
Ternyata data yang didapat juga menjadi tidak akurat. Dengan begitu dapat disimpulkan
bahwa sensor yang digunakan yaitu LV-Maxsonar EZ-1 tidak bisa melakukan
pengukuran di dalam fluida ini, yaitu didalam minyak pelumas karena akan mengotori
bagian dalam sensor dan akan menyebabkan sensor menjadi tidak akurat lagi.
Oleh karena itu proses pengujian dengan kondisi menggunakan fluida ini tidak
4.2 Error
Dari data-data hasil pengujian diatas, yaitu dari data hasil pengujian dengan
menggunakan alat (mode manual) dan dari data hasil pengujian secara manual dengan
menggunakan penggaris akan di dapatkan nilai error. Nilai error ini di dapat dengan
cara membandingkan data hasil pengujian alat dengan data hasil pengujian
menggunakan penggaris, yaitu dengan menggunakan rumus :
%
A = Jarak hasil pengukuran alat
B = Jarak sebenarnya
Juga akan diperoleh error rata-rata untuk setiap baris pengukuran, yaitu dengan
menggunakan rumus:
Berikut adalah tabel error yang didapat dari pengujian pada permukaan satu, dua
dan tiga :
1. Permukaan satu
Tabel 4.1. Error pada interval pengukuran 1 cm
Tabel 4.1 Lanjutan
Tabel 4.2. Error pada interval pengukuran 3 cm
Interval Baris 1 Baris 2 Baris 3 Baris 4 Baris 5 Baris 6 Baris 7 Baris 8 Baris 9 Baris 10
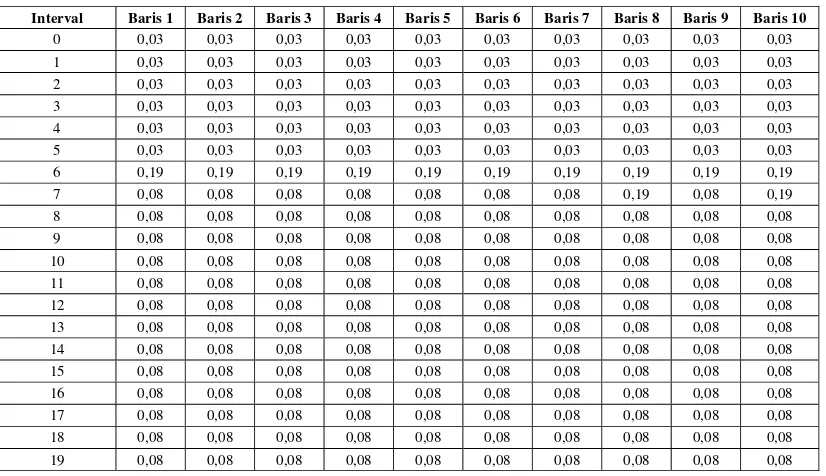
Tabel 4.3. Error pada interval pengukuran 5 cm
Interval Baris 1 Baris 2 Baris 3 Baris 4 Baris 5 Baris 6 Baris 7 Baris 8 Baris 9 Baris 10
Tabel 4.4. Error pada interval pengukuran 1 cm
Tabel 4.4 Lanjutan
Tabel 4.5. Error pada interval pengukuran 3 cm
Tabel 4.6. Error pada interval pengukuran 5 cm
Tabel 4.7. Error pada interval pengukuran 1 cm Interval Jarak Sebenarnya Hasil Pengukuran Error
0 -17,3 -15,24 0,12
Kemiringan 20o
Tabel 4.8. Error pada interval pengukuran 1 cm Interval Jarak Sebenarnya Hasil Pengukuran Error
0 -12,8 -15,24 0,19
Error rata-rata 0,08
4.3 Analisis
Berdasar pada data yang didapat dan disajikan pada gambar dan tabel diatas
(juga bisa di lihat pada Lampiran A) maka tahap berikutnya adalah analisis. Adapun
jenis-jenis analisis yang dilakukan yaitu:
1. Pengaruh interval pengukuran terhadap pemetaan yang dihasilkan (mode
manual)
2. Pengaruh error terhadap pemetaan yang dihasilkan (mode manual)
3. Pengaruh bentuk permukaan terhadap data yang didapat dari alat (mode manual
Pengaruh interval pengukuran terhadap pemetaan yang dihasilkan
Pada gambar 4.2 sampai gambar 4.10 atau pada hasil pemetaan permukaan satu
terlihat bahwa pengukuran yang dilakukan dengan interval 1 cm menghasilkan
pemetaan yang lebih detail atau lebih mirip dengan bentuk permukaan sebenarnya
dibandingkan dengan pengukuran yang dilakukan dengan interval 3 cm dan 5 cm.
Dengan kata lain bisa dikatakan bahwa data yang dihasilkan oleh pengukuran dengan
interval 3 cm dan 5 cm tidak bisa mewakili bentuk permukaan sebenarnya. Ini juga
terlihat pada hasil pemetaan permukaan dua tepatnya pada gambar 4.17. Pengujian yang
dilakukan secara manual dengan menggunakan penggaris saja menghasilkan pemetaan
yang berbeda jauh dengan bentuk sebenarrnya.
Dengan begitu interval pengukuran sangat berpengaruh terhadap bentuk
pemetaan yang dihasilkan, semakin kecil interval pengukuran maka pemetaan yang di
hasilkan akan semakin mendekati bentuk permukaan sebenarnya.
Pengaruh error terhadap pemetaan yang dihasilkan 1. Permukaan satu
Nilai error rata-rata yang didapat untuk setiap pengukuran sangatlah kecil yaitu
sekitar 0,05% - 0,09%. Pada tabel 4.1 dan tabel 4.2 nilai error terbesar untuk setiap
pengukuran adalah 0,19%, ini terjadi pada saat pengukuran dilakukan pada interval
6 cm, 21 cm dan 22 cm. Apabila dilihat dari peta yang dihasilkan, nilai error
terbesar ini terjadi pada daerah peralihan, yaitu dari permukaan tinggi ke permukaan
rendah dan sebaliknya dari permukaan rendah ke permukaan tinggi.
Pada interval 6 cm jarak atau kedalaman yang didapatkan dari alat adalah 17,78
cm, sedangkan pada pengukuran secara manual untuk interval tersebut seharusnya
jarak atau kedalamannya adalah 22 cm. Ini juga terjadi pada interval 21 cm dan 22
cm, seharusnya jarak atau kedalamannya adalah 22 cm tetapi jarak atau kedalaman
yang terukur oleh alat masih 17,78 cm
2. Permukaan dua
Pada permukaan dua nilai error rata-rata yang didapat untuk setiap pengukuran
adalah sekitar 0,05% - 0,72%. Tetapi jika dilihat dari error yang terjadi pada setiap
pengukuran ada yang mencapai 3,67 %, yaitu pengukuran baris ke 10 interval 12 cm
Sama seperti pada permukaan satu error sering terjadi pada dareah peralihan.
Selain itu dari posisi baris yang terlalu dekat ke sisi aquarium atau tempat pengujian
juga rentan terhadap error. Hal ini dikarenakan bentuk gelombang ultrasonik yang
dipancarkan oleh sensor tidak berupa garis lurus, tetapi seperti gambar di bawah ini.
Gambar 4.35. Bentuk gelombang ultrasonik yang dipancarkan
Pengukuran yang dilakukan pada permukan kedua, pada dasarnya adalah untuk
menguji apakah sensor bisa mendeteksi suatu cekungan. Dari semua percobaan
yang dilakukan terlihat bahwa sensor tidak bisa mendeteksi cekungan tersebut. Hal
ini dikarenakan cekungan yang diuji terlalu sempit.
3. Permukaan tiga
Error rata-rata yang didapat pada pengujian permukaan tiga untuk kemiringan
10o adalah 0,12% sedangkan untuk kemiringan 20o adalah 0,08 %. Sedangkan error
untuk setiap pengukurannya adalah 0,03% - 0,20% untuk kemiringan 10o dan 0% -
0,19% untuk kemiringan 20o
Error terjadi karena gelombang ultrasonik yang dipancarkan tidak bisa di
pantulkan lagi secara sempurna. Ini dikarenakan bentuk permukaan yang tidak datar.
Gelombang ultrasonik akan memantul dulu kemana-mana baru kemudian keterima lagi
oleh sensor, sehingga waktu tempuhnya menjadi lebih lama dan jarak yang
Berdasarkan data-data tersebut dapat disimpulkan bahwa error sering terjadi
pada daerah peralihan, yaitu dari permukaan tinggi ke permukaan rendah dan
sebaliknya dari permukaan rendah ke permukaan tinggi. Seperti pada gambar berikut:
Gambar 4.36. Contoh daerah rentan error
Sedangkan error yang terjadi pada pengujian yang dilakukan dalam mode
otomatis, tidak dapat diketahui. Hal ini dikarenakan dalam mode otomatis yang menjadi
acuan adalah waktu. Waktu disini adalah waktu pada saat proses pengukuran atau
pengambilan data itu dilakukan. Jadi, ketika proses pengukuran dilakukan, tempat atau
daerah yang di ukur tidak bisa diketahui secara pasti. Oleh karena itu hasil pengukuran
pada mode ini tidak bisa dibandingkan dengan hasil pengukuran secara manual
(menggunakan penggaris).
Pengaruh bentuk permukaan terhadap data yang didapat dari alat (mode manual dan otomatis)
Dari data yang telah dipaparkan sebelumnya dapat disimpulkan bahwa semakin
komplek bentuk permukaan yang akan dipetakan, maka data yang didapat dari alat
semakin rentan error. Hal ini telihat dari hasil pengujian pada permukaan dua. Selain
itu, untuk bentuk permukaan yang miring pemetaan yang dihasilkan juga tidak terlalu
mirip karena perbedaan ketinggian permukaan pada satu titik pengukuran dengan titik
pengukuran berikutnya kurang dari 1 inci, jadi data atau jarak yang didapat akan
dianggap sama dengan ketinggian sebelumnya. Hal ini terlihat pada hasil pengujian
pada permukaan tiga bentuk dari petanya akan seperti tangga. Berikut adalah
perbandingan dari hasil pemetaannya.
-25
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Setelah melakukan beberapa percobaan dan analisa, maka dapat diambil
kesimpulan diantaranya:
1. Pengukuran yang dilakukan dengan inteval 1 cm menghasilkan pemetaan
permukaan yang lebih detail atau lebih mirip dengan bentuk permukaan
sebenarnya dibandingkan dengan pengukuran yang dilakukan dengan interval 3
cm dan 5 cm.
2. Dari semua percobaan yang dilakukan error banyak terjadi pada daerah
peralihan, yaitu daerah antara permukaan tinggi dan permukaan rendah. Seperti
pada gambar berikut:
Gambar 5.1. Contoh daerah rentan error
3. Untuk bentuk permukaan yang tidak terlalu komplek dapat dipetakan dengan
cukup baik, seperti pada pengujian permukaan satu. Tetapi untuk bentuk
permukaan yang miring tidak bisa di petakan dengan baik karena perbedaan
ketinggian permukaan pada satu titik pengukuran dengan titik pengukuran
berikutnya kurang dari 1 inci jadi data atau jarak yang di dapat dianggap sama
dengan pengukuran pada titik sebelumnya.
4. Pemetaan yang dihasilkan memberikan tingkat keakuratan dengan error terbesar
adalah 3,67 %, terjadi pada pengujian permukaan dua yaitu pengukuran baris ke
10 interval 12 cm pada percobaan dengan interval 3 cm.
5.1 Saran
Hasil percobaan ini masih jauh dari sempurna, oleh karena itu perlu dilakukan
penelitian lebih lanjut dalam proses perancangannya. Adapun saran yang dapat
disampaikan adalah sebagai berikut:
1. Penggunan sensor yang langsung dapat digunakan didalam air, misalnya
LV-MaxSonar WR-1.
2. Tidak menutup kemungkian alat ini dikembangkan untuk bisa digerakkan secara
DAFTAR PUSTAKA
BAKOSURTANAL. (2004). Panduan Membaca Rupa Bumi Indonesia. Jakarta : Pusat
Pelayanan Jasa dan Informasi BAKOSURTANAL.
Firdaus. (2007). 64 Trik Tersembunti visual Basic 6. Palembang: Maxikom.
HTTP://www.roboticsconnection.com/c-4-robot-sensors.aspx. Diakses pada tanggal 23
Agustus 2008.
HTTP://www.Maxbotix.com. Diakses pada tanggal 25 Agustus 2008.
HTTP://www.maxbotix.com/uploads/MaxSonarEZ1.zip. Diakses pada tanggal 25
Agustus 2008.
HTTP://www.maxbotix.com/MaxSonar-EZ1__FAQ.html. Diakses pada tanggal 25
Agustus 2008.
Malvino. (2003). Prinsip-Prinsip Elektronika Buku Satu dan Buku Dua. Jakarta:
Salemba Teknika.
Prasetia, R., & Widodo, C.E. (2004). Interfacing Port Paralel dan Port Serial Dengan
Visual Basic 6.0. Yogyakarta: Andi.
Subiyanto, A. (2007). Karakterisasi Gelombang Ultrasonik Pada Minyak Pelumas.
PROFIL PENULIS
INDRA FIRMANSYAH.
Lahir di cianjur tanggal 8 April 1985. Menamatkan pendidikan SD
di SD Negeri Campaka III (1997), Menamatkan pendidikan SLTP
di SLTP Negeri 1 Cianjur (2000), Menamatkan pendidikan SLTA di
SMU Negeri 3 Cianjur (2003) dan melanjutkan studi S1 pada
Jurusan Teknik Komputer di Universitas Komputer Indonesia
(2003). Mengerjakan Tugas Akhir dengan judul Pemetaan
Permukaan Tanah Di Bawah Fluida Menggunakan Sensor
Ultrasonik.
E-mail : z3ro_85@yahoo.com
Alamat : Kp. KOPEM No. 6B RT 01 RW 10 Kelurahan Sawah Gede