LAMPIRAN B
PROGRAM DI MIKROKONTROLER ATMEGA 8535
/***************************************************** This program was produced by the
CodeWizardAVR V1.25.8 Standard Automatic Program Generator
© Copyright 1998-2007 Pavel Haiduc, HP InfoTech s.r.l. http://www.hpinfotech.com
Project : Version :
Date : 17/12/2011
Author : F4CG Company : F4CG Comments:
Chip type : ATmega8535 Program type : Application Clock frequency : 11,059200 MHz Memory model : Small
External SRAM size : 0 Data Stack size : 128
*****************************************************/
#include <mega8535.h>
// Alphanumeric LCD Module functions #asm
#include <lcd.h> #include <stdio.h> #include <delay.h>
int indikator2, kondisi, hitung, nilai1, nilai2, nilai3, indktor, temp, alamat; int ps1, ps2, ps3, ps4, ps5, ps6, ps7, ps8, ps9, ps10, ps11, ps12, ps13; float kec_m, kec_km, detik, jarak, v_maks;
unsigned char eeprom *pointer_eeprom; unsigned char data1[16];
#define RXB8 1 #define TXB8 0 #define UPE 2 #define OVR 3 #define FE 4 #define UDRE 5 #define RXC 7
#define FRAMING_ERROR (1<<FE) #define PARITY_ERROR (1<<UPE) #define DATA_OVERRUN (1<<OVR)
#define DATA_REGISTER_EMPTY (1<<UDRE) #define RX_COMPLETE (1<<RXC)
// USART Receiver buffer #define RX_BUFFER_SIZE 8 char rx_buffer[RX_BUFFER_SIZE];
#if RX_BUFFER_SIZE<256
unsigned char rx_wr_index,rx_rd_index,rx_counter; #else
// This flag is set on USART Receiver buffer overflow bit rx_buffer_overflow;
// USART Receiver interrupt service routine interrupt [USART_RXC] void usart_rx_isr(void) {
char status,data; status=UCSRA; data=UDR;
if ((status & (FRAMING_ERROR | PARITY_ERROR | DATA_OVERRUN))==0) {
rx_buffer[rx_wr_index]=data;
if (++rx_wr_index == RX_BUFFER_SIZE) rx_wr_index=0; if (++rx_counter == RX_BUFFER_SIZE)
}
#ifndef _DEBUG_TERMINAL_IO_
// Get a character from the USART Receiver buffer #define _ALTERNATE_GETCHAR_
PORTA.3=1; if (PINA.6==0) {temp=6; indktor=0;} PORTA.0=1; if (PINA.6==0) {temp=9; indktor=0;} PORTA.0=1;
PORTA.1=1; PORTA.2=1; PORTA.3=0; delay_ms(2);
if (PINA.5==0) {temp=0; indktor=0;} PORTA.3=1;
} }
{
// Declare your local variables here
// Input/Output Ports initialization // Port A initialization
// Func7=In Func6=In Func5=In Func4=In Func3=Out Func2=Out Func1=Out Func0=Out
// State7=P State6=P State5=P State4=P State3=1 State2=1 State1=1 State0=1 PORTA=0xFF;
DDRA=0x0F;
// Port B initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTB=0x00;
DDRB=0x00;
// Port C initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTC=0x00;
DDRC=0x00;
// Port D initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State7=T State6=T State5=T State4=T State3=P State2=P State1=T State0=T PORTD=0x0C;
DDRD=0x00;
// Mode: Normal top=FFh // Clock source: System Clock // Clock value: Timer 1 Stopped // Mode: Normal top=FFFFh // OC1A output: Discon. // OC1B output: Discon. // Noise Canceler: Off
// OC2 output: Disconnected
// Communication Parameters: 8 Data, 1 Stop, No Parity // USART Receiver: On
// Analog Comparator Input Capture by Timer/Counter 1: Off ACSR=0x80;
LAMPIRAN C
PPROGRAM VISUAL BASIC
============================================================ Public con As New ADODB.Connection
Public rssms As ADODB.Recordset
Public Sub connectDatabase() Set con = New ADODB.Connection Set rssms = New ADODB.Recordset
con.Open "DRIVER={MySQL ODBC 3.51
Driver};DESC=;DATABASE=smsd;SERVER=localhost;UID=root;PASSWORD=;P
rssms.CursorLocation = adUseClient
rssms.Open "select ReceivingDateTime, TextDecoded from inbox ORDER by ReceivingDateTime ASC", con, adOpenStatic, adLockOptimistic
Set DataGrid1.DataSource = rssms.DataSource DataGrid1.Columns(1).Width = 5700
DataGrid1.Columns(0).Width = 2450
'Me.DataGrid1.Columns(1).Width = Len(Me.DataGrid1.Columns(1).Text) rssms.MoveLast
DAFTAR PUSTAKA
Bejo, A. 2008. C dan AVR Rahasia Kemudahan Bahasa C dalam Mikrokontroller ATMega8535, Edisi I. Yogyakarta : Graha Ilmu
Budiharto,W dan Gamayel Rizal.2007. 12 Proyek Mikrokontroler Untuk Pemula.Jakarta : Penerbit PT Elex Media Komputindo Kelompok Gramedia
Budihartono, W dan F Sigit. 2008. Elektronika Digital + Mikroprosessor, Jakarta : Penerbit ANDI Yogyakarta
Eko Putra, Agfianto. 2002. Teknik Antarmuka Komputer Konsep dan Aplikasi. Yogyakarta: Graha Ilmu
Malvino. 1985. Prinsip – prinsip elektronika. Edisi III, Jilid 1. Jakarta : Gramedia Pustaka Umum
Sitompul, Opim.2010. Pemograman C di Lingkungan Linux. Edisi 2. Medan: USU Press
Tim Divisi Penelitian dan Pengembangan MADCOMS-madiun.2005.Mahir Dalam 7 Hari Pemograman Visual Basic 6.0,Jakarta :Penerbit Andi
Rangkuti,Syahban.2011.Mikrokontroller ATMEL AVR ,Bandung : Penerbit Informatika
Wardhana, L. 2006. Belajar Sendiri Mikrokontroler AVR Seri ATMega8535. Yogyakarta : Penerbit Andi
http://arifrohmanhakim.wordpress.com/2010/05/25/arsitektur-jaringan-gsm/ Diakses 29 Agustus 2012
http://te.ugm.ac.id/~risanuri/siskom/SISTEM_GSM.pdf Diakses 2 September 2012
http://jiastisipolcandradimuka.blogspot.com/2011/03/mengenal-cara-kerja-sms-short-message.html Diakses 29 Agustus 2012
http://www.atmel.com. Diakses tanggal 17 Desember 2012
BAB III
PERANCANGAN SISTEM
3.1. PERANCANGAN ALAT
3.1.1 DIAGRAM BLOK RANGKAIAN
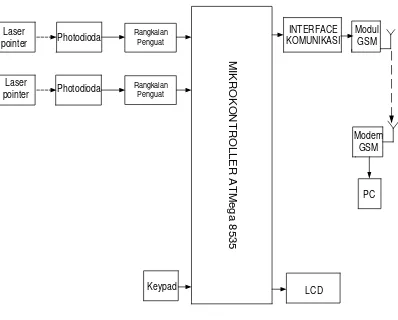
Adapun diagram blok dari sistem yang dirancang adalah seperti yang diperlihatkan pada gambar 3.1 berikut ini :
Laser
Dari gambar diagram blok diatas dapat di jelaskan cara kerja rangkaian secara singkat.Untuk melakukan pengukuran kendaraan maka dilakukan prosedur sebagai berikut, pertama Sensor di letakkan dengan jarak yang telah ditentukan yaitu 50 cm,kemudian kita menentukan input untuk nilai jarak dan kecepatan maksimum kendaraan yang dilakukan dengan menekan keypad , setelah itu kita lihat tampilan inputan jarak dan kecepatan maksimum tersebut di LCD.Setelah itu data akan diproses mikrokontroler dan akan disimpan di memory,kemudian akan tampil data My Project Sistem Ready.
Kendaraan akan memotong sensor I dan sensor II.Selanjutnya mikrokontroller akan menerima keluaran dari sensor I yang tegangannya di naikkan oleh rangkaian penguat, sehingga akan mengaktifkan counter. Setelah kendaraan melewati sensor 2 maka mikrokontroller akan menerima output untuk selanjutnya akan menghentikan counter. Mikrokontroller telah di buat program untuk , melakukan perhitungan kecepatan, setelah itu bila kecepatan kendaran yang diukur alat ini, melibihi kecepatan maksimum yang telah ditentukan , maka mikrokontroller akan mengirim data kecepatan kendaran tersebut, setelah itu mikrokontroller akan mengaktifkan modul GSM yang telah deprogram untuk mengirim data, dalam bentuk sms ke modem gsm yang telah terhubung ke personal computer (PC ) yang jaraknya jauh dari tempat pengukuran, dimana PC telah di lengkapi dengan program visual basic untuk menampilkan data-data kecepatan yang melampaui batas kecepatan maksimum, dengan bentuk data base.
3.1.2 Rangkaian Power Supplay (PSA)
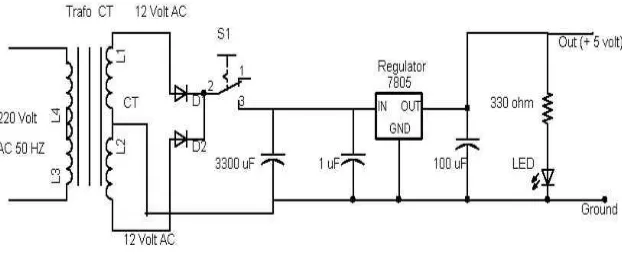
Rangkaian skematik power supply dapat dilihat pada gambar 3.2 di bawah ini:
Rangkaian power supply berfungsi untuk mensupplay arus dan tegangan ke seluruh rangkaian yang ada. Rangkaian power supply ini menghasilkan 1 keluaran, yaitu 5 volt , keluaran 5 volt digunakan untuk menghidupkan seluruh rangkaian kecuali rangkaian ADC.Trafo stepdown yang berfungsi untuk menurunkan tegangan dari 220 volt AC menjadi 12 volt AC. Kemudian 12 volt AC akan disearahkan dengan menggunakan dua buah dioda, selanjutnya 12 volt DC akan diratakan oleh kapasitor
2200 μF. Regulator tegangan 5 volt (LM7805CT) digunakan agar keluaran yang
dihasilkan tetap 5 volt walaupun terjadi perubahan pada tegangan masukannya. LED hanya sebagai indikator apabila PSA dinyalakan.
3.1.3 Rangkaian Mikrokontroler ATMEGA8535
Gambar 3.3 Rangkaian mikrokontroller ATMEGA8535
Mikrokontroler ini memiliki 32 port I/O, yaitu port A, port B, port C dan port D. Pin 33 sampai 40 adalah Port A yang merupakan port ADC, dimana port ini dapat menerima data analog. Pin 1 sampai 8 adalah port B. Pin 22 sampai 29 adalah port C. Dan Pin 14 sampai 21 adalah port D. Pin 10 dihubungkan ke sumber tegangan 5 volt. Dan pin 11 dihubungkan ke ground. Rangkaian mikrokontroler ini menggunakan komponen kristal sebagai sumber clocknya. Nilai kristal ini akan mempengaruhi kecepatan mikrokontroler dalam mengeksekusi suatu perintah tertentu. Pada pin 9 dihubungkan dengan sebuah kapasitor dan sebuah resistor yang dihubungkan ke ground. Kedua komponen ini berfungsi agar program pada mikrokontroler dijalankan beberapa saat setelah power aktip. Lamanya waktu antara aktipnya power pada IC mikrokontroler dan aktipnya program adalah sebesar perkalian antara kapasitor dan resistor tersebut.
Dari Sensor
Ke
Dis
p
lay
L
C
D
Dar
i K
ey
p
ad
3.1.4 Rangkaian Sensor
Rangkaian ini terdiri dari sebuah pemancar Laser, dan sebuah rangkaian penerima laser. Pemancar laser dipasang berhadapan dengan rangkaian penerima yang dilengkapi dengan photo dioda. Jika sinar laser mengenai photo dioda, maka rangkaian penerima akan menghasilkan sinyal high (1) yang dikirimkan ke mikrokontroller.
Ketika sinar Laser tidak mengenai photo dioda ( ada objek yang menghalangi sinar laser), maka rangkaian penerima akan menghasilkan sinyal low (0) yang dikirimkan ke mikrokontroller.
Pada alat ini pemancar yang digunakan adalah sebuah laser ponter, yang dijual di pasaran.
Gambar 3.4 Rangkaian Pemancar laser
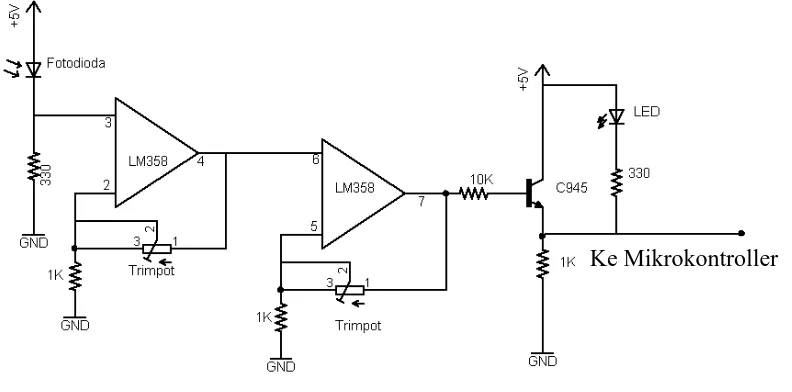
Rangkaian penerima laser tampak seperti gambar di bawah ini:
Gambar 3.5 Rangkaian Penerima sinar laser
Berdasarkan rangkaian di atas, maka tegangan output dari fotodioda dapat dihitung dengan persamaan sebagai berikut dengan menggunakan prinsip pembagi tegangan maka tegangan yang dihasilkan adalah:
a. Saat tidak ada sinar infra merah, R pada photodioda adalah 50 MΩ V photodioda = Ω
x 5 = 0,0000032 V = 3,2 µV
b. Saat ada sinar infra merah, R pada photodioda adalah 333 KΩ V photodioda = Ω
x 5 = 0,00495 V = 4,95 mV
tegangan input akan diperkuat sampai maksimal 100 kali penguatan, dimana besarnya penguatan dapat dihitung dengan menggunakan persamaan berikut:
Tegangan keluaran dari penguat pertama saat ada sinar infra merah adalah 0,495 Volt, tegangan ini belum cukup untuk dapat membuat transistor saturasi. Karena itu diperlukan penguatan yang kedua. Pada Op Amp kedua tegangan input akan diperkuat sampai 10 kali penguatan, dimana besarnya penguatan dapat dihitung dengan menggunakan persamaan berikut:
Penguatan kedua dapat dihitung dengan persamaan sebagai berikut: Vout=Av x Vin
b. Saat ada sinar infra merah, Vin = 0,495 V V= 10 x 0,495 V = 4,95 V
Maka dengan perolehan tegangan dari penguatan Op-Amp diatas maka jika saat tidak ada sinar infra merah , maka tegangan yang diperoleh adalah 3,3 mV pada tegangan ini transistor masih dalam keadaan cut off dimana terminal kolektor dan emiter dalam keaadan terbuka.Sehingga mikkrokontroler akan mendapat data Low dari sensor pada keadan tidak terkena cahaya infra merah. Dengan perolehan tegangan dari penguatan Op-Amp jika saat rangkaian sensor terkena sinar infra merah , maka tegangan yang diperoleh adalah 4,95 mV pada tegangan ini transistor masih dalam keadaan satu rasi dimana terminal kolektor dan emiter dalam keaadan tertutup. Sehingga mikkrokontroler akan mendapat data High dari sensor pada keadan terkena cahaya infra merah.
3.1.5 Rangkaian Keypad
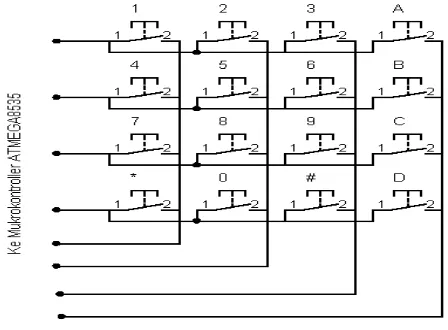
Gambar 3.6 Rangkaian keypad
Rangkaian keypad yang digunakan adalah rangkaian keypad yang telah ada dipasaran. Keypad ini terdiri dari 16 tombol yang hubungan antara tombol-tombolnya seperti tampak pada gambar di atas. Rangkaian ini dihubungkan ke PORTA mikrokontroler ATMEGA8535.
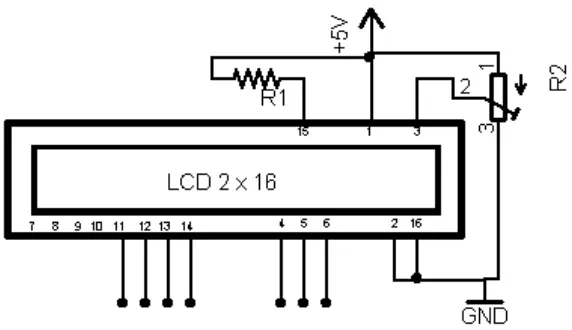
3.1.6 Rangkaian LCD (Liquid Crystal Display)
LCD (Liquid Crystal Display) adalah modul penampil yang banyak digunakan karena tampilannya menarik. LCD yang paling banyak digunakan saat ini ialah LCD LMB162ABC karena harganya cukup murah. LCD LMB162ABC merupakan modul LCD dengan tampilan 2x16 (2 baris x 16 kolom) dengan konsumsi daya rendah. Modul tersebut dilengkapi dengan mikrokontroler yang didesain khusus untuk mengendalikan LCD.
Pada LCD sudah terdapat driver untuk mengubah data ASCII output mikrokontroler menjadi tampilan karakter.Mikrokontroler HD44780 buatan Hitachi yang berfungsi sebagai pengendali LCD memiliki CGROM (Character Generator Read Only Memory), CGRAM (Character Generator Random Access Memory), dan DDRAM (Display Data Random Access Memory).
(D0-D7) dan kontrol yang terdiri atas Enable (E, Clock) untuk memalangkan data ke buffernya, sinyal Read/Write (R/W), Register Select (RS): RS= 0 modus komando, RS=1 modus data, ditambah jalur catu daya: Vss (ground), Vdd (Vcc, +5V), dan Vee (contrast control). Pada umumnya, VEE ini dihubungkan ke pembagi tegangan
(potensiometer) antara VCC dan Ground. Karena LCD yang digunakan mempunyai
backlamp, maka ditambahkan 2 pin yaitu pin ke- 15 berfungsi untuk catu daya +5
volt.
Gambar berikut menampilkan hubungan antara LCD dengan port mikrokontroler:
Gambar 3.7 Rangkaian Skematik dari LCD ke mikrokontroler
Pada gambar rangkaian skematik dari LCD pin 1 dihubungkan ke Vcc (5V), pin 2 dan 16 dihubungkan ke Gnd (Ground), pin 3 merupakan pengaturan tegangan Contrast dari LCD, pin 4 merupakan Register Select (RS), pin 5 merupakan R/W (Read/Write), pin 6 merupakan Enable, pin 11-14 merupakan data. Reset, Enable, R/W dan data dihubungkan ke mikrokontroler Atmega8535. Fungsi dari potensiometer (R2) adalah untuk mengatur gelap/terangnya karakter yang ditampilkan pada LCD.
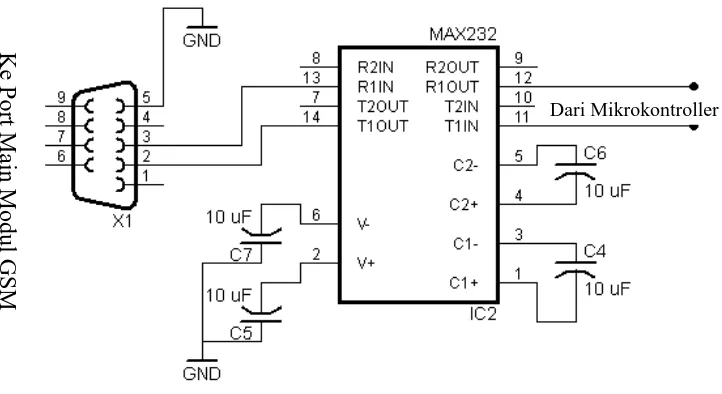
3.1.7 Rangkaian Driverr MAX232
Untuk menghubungkan mikrokontroller dengan modul GSM diperlukan komunikasi serial RS232r, driver yang digunakan adalah MAX232.Driver ini berfungsi untuk mesinkronisasi tegangan antara mikrokontroller dengan Modul GSM.Sehingga komunikasi serial dapat terjadi antara mikrokontroler dan modul GSM.Rangkaian driver MAX232 ini ditunjukkan pada gambar 3.8 berikut:
Gambar 3.8 rangkaian MAX232
Rangkaian ini terdiri dari sebuah ic MAX232 dan 4 buah elektrolit kapasitor. Rangkaian ini berfungsi mengubah logika high +3 s/d +25 volt pada DB9 menjadi logika high 5 volt pada keluarannya, juga mengubah logika low -3 s/d -25 volt pada DB9 menjadi logika low 0 volt pada keluarannya. Dan sebaliknya,dimana tegangan +3s/d-3 volt tidak di definisikan. Pin 12 dan Pin 11 akan menerima data serial berupa data kecepatan yang telah diprogram di mikrokontroller yang akan dikirim ke modul GSM , sehingga modul GSM akan mengirim Data serial tadi dalam bentuk SMS ke modem GSM yang terhubung ke PC.Fungsi utamanya adalah Untuk mengkonversikan sinyal TTL pada mikrokontroler menjadi sinyal seial port yang dibutuhkan.
Ke
P
or
t Main Modul
GSM
3.1.8 Module GSM SIM300EVB dan Modem GSM
Perangkat GSM yang digunakan dalam perancangan ini adalah D-GSM300 yaitu Modul SIMCOM SIM300EVB yang dikembangkan oleh Delta Electronic menjadi Modul GSM Modem siap pakai sehingga perangkat mikrokontroler maupun PC dapat mengaksesnya dengan mudah. PC dapat mengakses modul ini melalui port RS232 yang disediakan sedangkan mikrokontroler dapat mengakses melalui port serial. Untuk netbook atau laptop yang tidak memiliki port serial, dengan tambahan DU‐232, SIM300EVB dapat diakses melalui port USB. Dalam pengguanaan modul gsm digunakan perintah atau yang lebih dikenal dengan “at-command” yang ditetapkan baik secara internasional maupun oleh vendor pembuat modem itu sendiri.
pengoperasian SIM300EVB dengan PC dilakukan menghubungkan port RS232 SIM300EVB pada port RS232 PC. Software yang digunakan adalah GTKterm/minicom (linux) atau Hyperterminal (windows). Baudrate standar yang digunakan D-GSM300 adalah 115200 bps. Module SIM300EVB ditunjukkan oleh gambar berikut :
Gambar 3.9 Modul GSM SIM300 Top Dan Bottom View
3.2 Perancangan Program
Diagram alir programnya adalah sebagai berikut:
start
Inisialisasi ke port dengan modul GSM
Tunggu Sinyal dari sensor
Nilai V Maks = Baca eeprom V maks = Nilai V Maks
Tampilkan nilai jarak , t (detik) V = Nilai V ( meter )
Tampilkan nilai jarak , t (detik) V = Nilai V ( Kilometer )
Ya
Tidak
Masukkan Data jarak dan Vmaks ke eeprom
Tidak
Pada saat power dihidupkan maka mikrokontroler akan melakukan inilisiasi port ke modul GSM, bila koneksi modul GSM dengan mikrokontroler terubung dengan baik maka mikrokontroler akan membaca nilai inputan V maks dan jarak yang disimpan di EEPROM yang sebelumnya telah disetting dengan menggunakan Keypad , yang telah terhubung dengan mikrokontroller, kemudian mikrokontroller akan menunggu sinyal dari sensor , dimana pada perancangan alat terdapat dua sensor, yaitu sensor 1 dan sensor 2 .Sensor yang digunakan adalah photodioda,apabila sensor satu mengirim inputan 0 ( Low ) yang akan mengaktifkan program penghitungan waktu dan program ini akan berakhir hingga sensor 2 mengirim inputan 0 (Low), selama sensor 2 tidak 0 (LOW) tetap melakukan pengitungan waktu .
Apabila mikrokontroller tidak mendapat data input dari sensor 1 maka mikrokontroler dapat menerima settingan data jarak dan kecepatan maksimum yang ditekan melalui keypad,kemudian data akan di simpan dalam EEPROM. Setelah didapat waktu maka dilaksanakan program penghitungan kecepatan yaitu Jarak dibagi waktu, dimana jarak nya adalah 0,5 meter dan waktu ( t ) detik, setelah itu tampilkan pada LCD nilai jarak, t(detik) dan nilai v (meter/detik).Kemudian lakukan konversi ke Km/Jam, setelah itu tampilkan di LCD nilai jarak,t(detik) dan nilai v ( kilometer/jam ). Apabila hasil perhitungan kecepatan (V) nya lebih besar atau sama dengan kecepatan V maksimum yang telah disimpan dalam EEPROM maka mikrokontroler perintahkan modul GSM mengirim data kecepatan yang telah terukur yang melebihi batas kecepatan maksimum dalam bentuk SMS kemudian akhiri program, dimana pada mikrokontroler teah dibuat program untuk mengirim format data SMS yang akan dikirimkan oleh modul GSM.
BAB IV
PENGUJIAN SISTEM
Pada bab ini, akan dibahas pengujian alat mulai dari pengujian alat permodul sampai pengujian alat secara keseluruhan. Pengujian tersebut akan di lakukan secara bertahap dengan urutan sebagai berikut:
a. Pengujian minimum sistem
b. Pengujian sistem secara keseluruhan
4.1 Pengujian Minimum Sistem
4.1.1 Pengujian Rangkaian mikrokontroller AVR ATMega8535
Pada pengujian rangkaian mikrokontroller dilakukan percobaan yang sifatnya sederhana tapi dapat menunjukkan bekerja tidaknya minimum system pada rangkaian tersebut.Percobaan tersebut adalah menghidupkan beberapa buah LED secara bergantian. Percobaan ini dilakukan pada I/O port (Port A). Untuk menghidupkan LED tersebut digunakan program sebagai berikut:
while (1) {
// Place your code here PORTA=170
delay_ms(100); PORTA=15 delay_ms(100); };
Jika Program tersebut dijalankan , maka LED akan hidup dan mati secara bergantian seperti yang ditunjukkan oleh tabel sebagai berikut:
Tabel 4.1 Pengujian Rangkaian Mikrokontroler AVR ATMega8535
LED 1 LED 2 LED 3 LED 4 LED 5 LED 6 LED 7 LED 8
Tahap 1 ON OFF ON OFF ON OFF ON OFF
Tahap 2 ON OFF ON OFF ON OFF ON OFF
4.1.2 Pengujian LCD
Selain percobaan uji I/O Port ( Port A), juga duilakukan pengujian LCD. Pada tahap ini dilakukan percobaan untuk mengaktifkan LCD system. Pengaktifan LCD ini dilakukan dengan cara menampilkan beberapa karakter pada LCD.Untuk menampilkan beberapa karakter tersebut digunakan listing program sebagai berikut:
while (1) {
// Place your code here lcd_gotoxy(4,0);
lcd_putsf("MY PROJECT"); delay_ms(30);
lcd_clear(); };
}
4.1.3Pengujian Keypad
Pengujian rangkaian tombol ini dapat dilakukan dengan menghubungkan rangkaian ini dengan mikrokontroler ATMEGA8535, kemudian memberikan program sederhana untuk mengetahui baik/tidaknya rangkaian ini. Rangkaian dihubungkan ke PORTA.
Untuk Mengecek penekanan pada tombol “A” yang paling atas, maka PORTA.0
diberi logika 0 Dengan demikian maka PORTA.0 akan mendapat logika low (0), dan yang lainnya mendapat logika high (1), seperti berikut:
Jika terjadi penekanan pada Tbl A, maka PORTA.0 akan terhubung ke PORTA.7 yang menyebabkan PORTA.7 juga akan mendapatkan logika low (0). Seperti berikut:
A.7 A.6 A.5 A.4 A.3 A.2 A.1 A.0 0 1 1 1 1 1 1 0
Nilai pada PORTA.7 akan berubah menjadi 0. Nilai inilah sebagai indikasi adanya penekanan pada tombol A.
A.7 A.6 A.5 A.4 A.3 A.2 A.1 A.0 1 1 1 0 1 1 1 0
Nilai pada PORTA.4 akan berubah menjadi 0. Nilai inilah sebagai indikasi adanya penekanan pada tombol 1. Demikian seterusnya untuk tombol-tombil yang lain.
Program yang diisikan pada mikrokontroler ATMEGA8535 untuk menguji rangkaian keypad adalah sebagai berikut:
PORTA.0=0;
if (PINA.4==0) {temp=1; indktor=0;} if (PINA.5==0) {temp=2; indktor=0;} if (PINA.6==0) {temp=3; indktor=0;}
Program diatas akan menunggu penekanan pada tombol 1, tombol 2, tombol 3 dan seterusnya. Jika tombol 1 ditekan, maka variable temp akan diisi dengan 1, jika tombol 2 ditekan, maka variable temp akan diisi dengan 2 dan jika tombol 3 ditekan, maka variable temp akan diisi dengan 3. Variable temp merupakan variable untuk penyimpanan nilai tombol yang ditekan. Indktor merupakan variable untuk keluar dari rutin baca keypad. Jika indktor bernilai 0 makan program akan keluar dari rutin baca keypad dan melanjutkan ke rutin selanjutnya.
Untuk Mengecek penekanan pada 4 tombol yang di tengah, maka PORTA.1 diberi logika 0 Dengan demikian maka PORTA.1 akan mendapat logika low (0), dan yang lainnya mendapat logika high (1).
Jika terjadi penekanan pada Tbl 4, maka PORTA.0 akan terhubung ke PORTA.4 yang menyebabkan PORTA.4 juga akan mendapatkan logika low (0). Seperti berikut,
Nilai pada PORTA.4 akan berubah menjadi 0. Nilai inilah sebagai indikasi adanya penekanan pada tombol 4.
Jika terjadi penekanan pada Tbl 5, maka PORTA.0 akan terhubung ke PORTA.5 yang menyebabkan PORTA.5 juga akan mendapatkan logika low (0). Seperti berikut,
A.7 A.6 A.5 A.4 A.3 A.2 A.1 A.0 1 1 0 1 1 1 1 0
Nilai pada PORTA.5 akan berubah menjadi 0. Nilai inilah sebagai indikasi adanya penekanan pada tombol 5. Demikian seterusnya untuk tombol-tombil yang lain.
Program yang diisikan pada mikrokontroler ATMEGA8535 untuk menguji rangkaian keypad adalah sebagai berikut:
PORTA.1=0;
if (PINA.4==0) {temp=4; indktor=0;} if (PINA.5==0) {temp=5; indktor=0;} if (PINA.6==0) {temp=6; indktor=0;}
4.1.4 Pengujian Rangkaian Sensor
Pengujian pada rangkaian dapat dilakukan dengan mengukur tegangan pada output sensor. Dari hasil pengujian didapatkan tegangan sebagai berikut :
Tabel 4.2 Pengujian Rangkaian Sensor
Kondisi Tegangan pada output sensor Sensor tidak Terhalang 4,98 volt
Sensor Terhalang 0,003 volt
4.1.5 Pengujian Module GSM
Pengoperasian modul GSM SIM300EVB dengan mikrokontroler ATMega8535 dilakukan dengan menghubungkan pin main SIM300EVB pada pin USART mikrokontroler dan menjalankan at-command via mikrokontroler dan menampilkan respon dari modul GSM pada LCD. Baudrate standar yang digunakan dalam komunikasi D-GSM300 dengan ATMega8535 adalah 9600 bps.
Pengujian pengoperasian modul GSM SIM300EVB dengan mikrokontroler sebagai berikut,pengiriman sms dilakukan dalam mode teks. Pengoperasian pengiriman sms dengan menggunakan mikrokontroler dilakukan yaitu dengan engiriman sms pada 1 penerima. Berikut potongan listing program mikrokontroler ATMega8535 untuk mengirimkan at-commad pada modul gsm untuk mengirim sms: void send_SMS( )
{
printf("at+cmgs="); // Mengirim sms tanpa menyimpan pada memori putchar('"');
printf("+6285359710965"); // No Id GSM yang dituju putchar('"');
delay_ms(1000);
4.2 Pengujian Sistem Secara Keseluruhan
4.2.1 Analisa Perhitungan kecepatan kendaraan secara teori
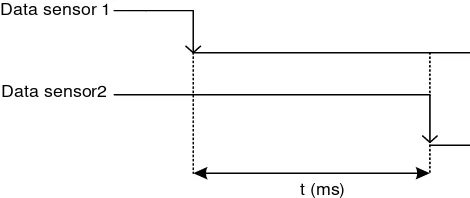
Mikrokontroller melakukan penghitungan jumlah waktu yang dibutuhkan untuk menerima data sensor 1 dan sensor 2, Pada saat data dari sensor 1 adalah low, maka data ini digunakan untuk memerintahkan mikrokontroller melakukan penghitungan waktu, apabila mikrokontroller menerima data masukan low dari sensor 2, maka data low sensor 2 digunakan untuk menghentikan program perhitungan waktu. Dengan potongan listing program dari codevision sebagai berikut:
Data sensor 1
Data sensor2
t (ms)
Gambar 4.1 Diagram perhitungan selang waktu antara data sensor 1 dan data dari sensor 2.
Dari gambar diatas menunjukkan keadaan jika PIND.3 dan PIND.2 mendapatkan trigger negatif, sehingga perhitungan waktu di mulai dari PIND.3 = 0 memulai perhitungan waktu dan PIND.2 = 0 untuk menghentikan perhitungan waktu. Dimana selang waktu dihitung dengan kelipatan 2 milisekon.misalkan waktu yang terukur adalah t ( mili second ) diamana dalam pemograman mikrokontroller waktu ( t ) dikonversikan ke detik yaitu 2 x sehingga t ( detik ) = t milisekon / 500, sedangkan jarak sensor 1 dan sensor 2 ( S ) adalah tetap yaitu 50 cm.Jarak ( S ) adalah 50 cm = 0,5 m dimana rumus kecepatan ( v ) = S / t maka untuk mengkonverikan ke Km/Jam sebagai satuan kecepatan adalah sebagai berikut:
v
=
0,5 m
di konversikan ke Km/jam menjadi
v =
0,5 m
x
3 00 1000v
=
1,84.2.2 Data Pengujian Alat Secara Keseluruhan
Untuk mengetahui ketelitian alat yang telah dirancang maka dilakukan suatu pengujian dengan tabel sebagai berikut:
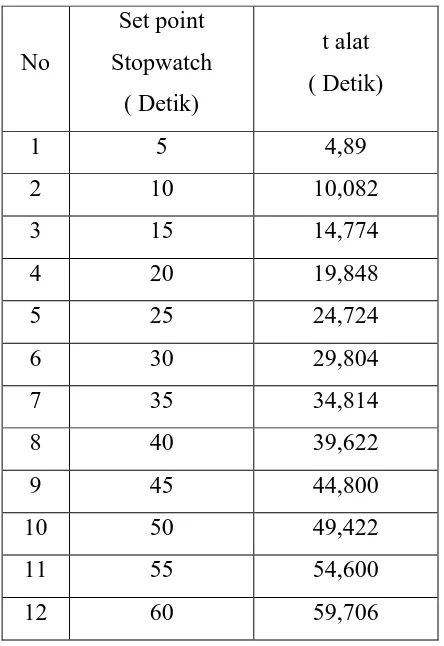
Tabel 4.3 Pengujian alat dengan stopwatch
No
Pengujian t ( waktu ) di alat dilakukan untuk membandingkan apakah t (waktu) yang diprogram di alat sudah cukup baik, sehingga alat yang dirancang dapat digunakan sebagai alat pengukur kecepatan kendaraan bermotor, pada pengujian t alat dibandingkan dengan t stopwatch . Dengan memvariasikan waktu di stopwatch dari 5 detik sampai 60 detik, dimana pada setiap setpoin waktu di butuhkan untuk mengaktifkan sensor 1 dan sensor 2, dimana sinyal keluaran dari sensor 1 akan mengaktifkan counter untuk memulai perhitungan waktu dan sensor 2 merupakan sinyal untuk meghentikan counter penghitungan waktu pada program.
Tabel 4.4 Penguian alat secara keseluruhan
Persamaan yang digunakan untuk menghitung persentase (%) kesalahan adalah :
% kesalahan = v speedometer – v alat
v s eedometer
x 100 % ...( 4.3)
4.2.3 Tampilan Database Kecepatan Melebihi Kecepatan Maksimum
Setelah data kecepatan maksimum di deteksi dan diolah oleh alat, maka data akan dikirim dalam bentuk SMS dengan menggunakan modul GSM yang akan diterima oleh modem GSM pada PC dan ditampilkan dalam bentuk database dengan menggunakan visual basic. Berikut tampilan database kecepatan maksimum pada pengujian alat:
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari hasil perancangan alat hingga pengujian dan pembahasan sistem maka penulis dapat menarik kesimpulan, antara lain :
1. Alat yang dirancang dapat di gunakan untuk pengukuran kecepatan kendaraan bermotor yang melintas di jalan raya atau pun jalan tol yang memiliki peraturan batas kecepatan maksimum.
2. Alat ini dapat melakukan pengukuran kecepatan kendaraan bermotor yang di pantau pada jarak jauh , karena data yang di ukur akan dikirim dalam bentuk SMS melalui komunikasi GSM .
3. Dari Pengujian alat ,besar kesalahan rata-rata dari alat dalam pengukuran kecepatan adalah 4,26 %, ini terjadi karena ada delay pada program .
5.2 Saran
Setelah melakukan penelitian ini diperoleh beberapa hal yang dapat dijadikan saran untuk penelitian lebih lanjut, antara lain :
1. Pada perancangan alat ini, diharapkan dapat dikembangkan kembali untuk mendeteksi identitas kendaraan ,yang melaju melebihi batas kecepatan maksimum dan menyimpan datanya.
2. Pada perancangan alat ini, kirannya dapat dikembagkan lagi dengan menggunakan counter waktu dengan skala mikrosekon, untuk memperoleh nilai waktu yang lebih real, dan mengunakan pemograman yang baik untuk meminimalkan pengaruh delay pada program sehingga dapat diproleh data kecepatan yang lebih baik lagi.
BAB II
TINJAUAN PUSTAKA
2.1 Mikrokontroler ATMega8535
Mikrokontroler dapat dianalogikan sebagai sebuah sistem komputer yang dikemas dalam sebuah chip,artinya di dalam sebuah IC mikrokontroler sebetulnya sudah terdapat kebutuhan minimal agar mikroprosesor dapat bekerja,yaitu meliputi mikroprosesor,ROM,RAM,I/O dan clock seperti halnya yang dimiliki oleh sebuah PC.Mengingat kemasannya yang berupa sebuah chip dengan ukuran yang relatif lebih kecil , tentu saja spesifikasi dan kemampuan yang dimiliki oleh mikrokontroller akan menjadi lebih rendah bila dibandingkan dengan sistem komputer seperti PC baik dilihat dari segi kecepatannya. Tidak seperti system komputer, yang mampu menangani berbagai macam program aplikasi (misalnya pengolah kata, pengolah angka dan lain sebagainya), mikrokontroler hanya bisa digunakan untuk satu aplikasi tertentu saja.
Meskipun dari sebuah kemampuan lebih rendah tetapi mikrokontroller memiliki kelebihan yang tidak bisa diperoleh pada sistem komputer yaitu,dengan kemasannya yang kecil dan kompak membuat mikrokontroller menjadi lebih fleksibel dan praktis digunakan terutama pada sistem-sistem yang relatif tidak terlalu kompleks atau tidak memerlukan bahan komputasi yang tinggi.
2.1.1 Arsitektur Mikrokontroler AVR ATMEGA8535
Mikrokontroller AVR merupakan keluarga mikrokontroller RISC (Reduced Instruction Set Computing) keluaran Atmel.Konsep arsitektur AVR pada mulanya
AVR merupakan mikrokontroller dengan arsitektur Harvard dimana antara kode program dan data disimpan dalam memori secara terpisah. Umumnya arsitektur Havard ini menyimpan kode program dalam memori permanen atau semi-permanen(non Volatille) Sedangkan data disimpan dalam memori tidak permanen(Volatile).ATMega8535 memiliki fitur yang cukup lengkap,mulai dari kapasitas memori program dan memori data yang cukup besar ,interupsi,timer/counter,PWM,USART,TWI,analog comparator,EEPROM internal dan juga ADC internal semuanaya ada dalam ATMega8535.
Selain itu kemampuan kecepatan ekseskusi yang lebih tinggi menjadi alasan bagi banyak orang untuk beralih dan lebih memilih untuk menggunakan mikrokontroller jenis AVR dari pada pendahulu nya keluarga MCS-51.
Secara garis besar, mikrokontroler ATMEGA8535 memiliki arsitektur harvard, yaitu memisahkan memori untuk kode program dan memori untuk data
sehingga dapat memaksimalkan unjuk kerja dan pararelisme .Instruksi-instruksi dalam memori program dieksekusi dalam salah satu alur tunggal , dimana pada saat satu instruksi di kerjakan instruksi berikutnya sudah diambil dari memeori program.
Gambar 2.1 Arsitektur ATMega8535
2.1.2 Fitur ATMega8535
Berikut ini adalah fitur-fitur yang dimiliki oleh ATMega8535:
1. 130 macam instruksi,yang hampir semuanya dieksekusi dalam satu siklus clock. 2. Kecepatan mencapai 16 MIPS dengan clock 16 MHZ.
3. 512 Byte internal EEPROM. 4. 32x8-bit register serba guna.
7. Programming Lock, fasilitas untuk mengamankan kode program. 8. 4 channel output PWM.
9. 8 channel ADC 10-Bit.
10. 2 Buah timer/counter 8-bit dan 1 buah timer/counter 16-bit. 11. Serial USART.
12. Master/Slave SPI serial interface. 13. Serial TWI atau 12 C.
14. On-Chip Analog comparator.
2.1.3 Konfigurasi Pin ATMega8535
Mikrokontroler ATMega8535 memiliki 40 pin untuk model PDIP ditunjukkan pada Gambar 2.2, dan 44 pin untuk model TQFP dan PLCC. Nama-nama pin pada mikrokontroler ini adalah :
1. VCC : merupakan pin yang berfungsi sebagai pin masukan catu daya digital. 2. GND : merupakan pin ground untuk catu daya digital.
3. Port A (PA0...PA7) : merupakan pin I/O 8bit dua arah(bi-directional) dan pin masukan 8 chanel ADC.
4. Port B (PB0 – PB7) : merupakan akan pin I/O 8 bit dua arah (bi-directional)dengan resistor pull-up internal dan pin fungsi khusus, yaitu sebagai Timer/Counter, komperator analog dan SPI.
5. Port C (PC0 – PC7) : merupakan pin I/O 8bit dua arah (bi-directional)dan pin fungsi khusus, yaitu TWI, komperator analog, input ADC dan Timer Osilator. 6. Port D (PD0 – PD7) : merupakan pin I/O 8 bit dua arah(bi-directional) dan pin fungsi khusus, yaitu komperator analog, interupsi eksternal dan komunikasi serial.
7. RESET : merupakan pin yang digunakan untuk mereset mikrokontroler. 8. XTAL1 :merupakan input ke penguat osilator pembalik dan input ke internal
clock.
9. XTAL2 : merupakan out put dari penguat oslator pembalik.
10.AVCC : merupakan pin masukan tegangan untuk ADC yang terhubung ke portA.
Gambar 2.2 Konfigurasi Pin ATMega8535 Deskripsi pin-pin pada mikrokontroler ATMega8535 :
1.Port A
Merupakan 8-bit dua arah bi-directional port I/O,dengan menggunakan resistor pull-up internal dimana setiap pinnya dapat diatur per bit. Output buffer Port A dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port A (DDRA) harus disetting terlebih dahulu sebelum Port A digunakan. Bit-bit DDRA diisi 0 jika ingin memfungsikan pin-pin port A yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, kedelapan pin port A juga digunakan untuk masukan8 channel ADC.
2. Port B
Merupakan 8-bit dua arah(bi-directional) port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer Port B dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port B (DDRB) harus disetting terlebih dahulu sebelum Port B digunakan. Bit-bit DDRB diisi 0 jika ingin memfungsikan pin-pin port B yang bersesuaian sebagai input, atau diisi 1 jika sebagai output.Selain sebagai port I/O 8 bit port B juga dapat difungsikan secara individu sebagai berikut:
2.PB6: MISO( SPI Bus Master Input/ Slave Out put)
Merupakan port I/O 8-bit dua arah (bi-directional). Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer Port C dapat memberi
1.PC7: TOSC2 (Timer Oscillator 2) 2.PC6: TOSC1 (Timer Oscillator 1) 3.PC1: SDA (Serial Data Input/Output) 4.PC0: SCI (Serial Clock)
4. Port D
1.PD7: OC2 ( Ouput Compare Timer/Counter 1) 2.PD6: ICP1 ( Timer Counter 1 input capture)
3.PD5: OC1A ( Output Compare A Timer /Counter1) 4.PD4: OC1B ( Output Compare B Timer/Counter 1) 5.PD3: INT1 ( External Interrupt 1 Input)
6.PD2: INT0 ( External interrupt 0 Input) 7.PD1: TXD ( USART Transmit)
8.PD0: RXD ( USART Receive)
5. RESET
RST pada pin 9 merupakan pin reset yang akan bekerja bira diberi pulsa rendah (aktif Low) selama minimal 1,5us.
6. XTAL2
Merupakan out put dari penguat dari osilator pembalik
7. XTAL1
Merupakan input ke penguat osilator pembalik dan input ke internal clock.
8. AVcc
Avcc adalah pin masukan catu daya yang digunakan untuk masukan analog ADC yang terhubung ke Port A. Kaki ini harus secara eksternal terhubung ke Vcc melalui lowpass filter.
9. AREF
AREF adalah pin masukan referensi analog untuk ADC. Untuk operasionalisasi ADC, suatu level tegangan antara AGND dan Avcc harus dibeikan ke kaki ini.
10. AGND
2.1.4 Peta Memory ATMega8535
Mikrokontroller ATMega8535 memiliki 3 jenis memori yaitu memori program, memori data dan memori EEPROM.Ketigannya memiliki ruang-ruang tersendiri dan terpisah seperti terlihat pada gambar 2.5
Gambar 2.3 Organisasi memori ATMega8535
1.Memori Program
2.Memori Data
ATMega8535 memiliki kapasitas memori data sebesar 608 byte yang terbagi menjadi 3 bagian yaitu register serba guna,register I/O dan SRAM. 32 byte alamat terendah digunakan untuk register serbaguna yaitu R0 – R31. 64 byte berikut nya digunakan untuk register I/O yang digunakan untuk mengatur fasilitas timer /counter ,interrupsi,ADC,USART,SPI,EEPROM dan port I/O seperti Port A, Port B, Port C, dan Port D. Selanjutnya 512 byte diatasnya digunakan untuk memory data SRAM .
Jika register-register I/O diatas diakses seperti mengakses data pada memori ( Jika kita menggunakan instruksi LD atau ST ) maka register I/O diatas menempati alamat 0020-005F. Tetapi jika register-register I/O diakses seperti mengakses I/O pada umumnya ( menggunakan instruksi IN/ IOUT) maka register I/O diatas menempati alamat memori 0000h – 003Fh.
3.Memori EEPROM
ATMega8535 memiliki memori EEPROM sebesar 512 byte yang terpisah dari memori program maupun dari memori data. Memori EEPROM ini hanaya dapat diakses dengan menggunakan register-register I/O yaitu register EEPROM Addres ( EEARH-EEARL),register EEPROM Data (EEDR) dan register EEPROM control ( EECR). Untuk megakses memory EEPROM ini diperlakukan sperti mengakses data eksternal sehingga waktu dari eksekusi relatif lebih lama dibadingkan jika kita mengakses data dari SRAM.
2.1.5 Status Register ( SREG)
Gambar 2.4 Status Register
Status Register ATMega8535:
1.Bit 7 – I : Global Interrupt Enable
Bit I digunakan untuk mengaktifkan interrupsi secara umum ( interrupsi
global) .Jika bit I benilai „1‟ maka interrupsi secara umum akan aktif , tetapi
jika bernilai „0‟ maka tidak ada satupun interrupsi yang aktif.Pengaturan jenis -jenis interrupsi apa sja yang akan aktif dilakukan dengan mengatur register kontrol yang sesuai dengan jenis interrupsi tersebut, dengan terlebih dahulu
mengaktifkan interupsi global ,yaitu bit I diset‟1‟.
2.Bit 6 – T : Bit Copy Storage
Bit T digunakan untuk mementukan bit sumber atau bit tujuan pada instruksi bit copy.Pada instruksi BST ,data akan dicopy dari register ke bit T( Bit T sebagai tujuan) sedangkan pada instruksi BLD, bit T akan di copy ke register ( Bit T Sebagai Sumber).
3.Bit 5 – H : Half carry Flag
Bit H digunakan untuk menunjukkan ada tidaknya setengah carry pada operasi aritmatika BCD ,yaitu membagi satu byte data menjadi dua bagian ( masing-masing 4 bit) dan masing-masing-masing-masing bagian dianggap sebagai 1 digit desimal. 4.Bit 4 – S: Sign bit
5.Bit 3 –V : Two‟s Complement over flow flag
Bit V digunakan untuk mendukun operasi aritmatika komplemen 2.Jika terjadi luapan pada operasi aritmatika bilangan komplemen 2 maka akan
menyebabkan bit V bernilai „1‟.
6.Bit 2 - N : Negative Flag
Bit N digunakan untuk menunjukkan apakah hasil sebuah operasi aritmatika ataupun operasi logika bernilai negatif atau tidak.Jika hasilnya negatif maka
bit N bernilai „1‟ dan jika hasilnya bernilai positif maka bit N bernila‟0‟.
7.Bit 1 - Z : Zero Flag
Bit Z digunakan untuk menunjukkan hasil operasi aritmatika ataupun operasi
logika apakah bernilai nol atau tidak.Jika hasilnya nol maka bit Z bernilai „1‟ dan jika hasilnya tidak nol maka bit Z bernilai‟0‟.
8.Bit 0 – C : Carry flag
Bit C digunakan untuk menunjukkan hasil operasi aritmatika ataupun logika apakah ada carry atau tidak.Jika ada carry maka bit C bernilai‟1‟ dan jikatidak
ada carry maka bit C akan bernilai „0‟.
2.1.6 Register Serba guna ( General Purpose Register)
Gambar 2.5 Register Serba guna
2.1.7 USART ( Universal Synchronous and Asynchoronous Serial Receiver And Transmitter)
Universal Synchronous Serial Receiver and Transmitter (USART) juga merupakan
salah satu metode komunikasi serial yang dimiliki oleh ATMega8535. USART merupakan komunikasi yang memiliki fleksibilitas yang tinggi, yang dapat kita gunakan untuk melakukan transfer data baik antara mikrokontroler maupun dengan modul-modul eksternal termasuk PC yang memiliki fitur UART.
USART memungkinkan transmisi data baik secara synchronous maupun asynchronous sehingga dengan demikian USART pasti kompatibel dengan UART.
Pada ATMega8535,pengaturan secara umum pengaturan mode komunikasi baik Synchronous maupun Asynchronous adalah sama , perbedaannya hanya terletak pada
sumber clocknya saja.
2.2 Modul GSM
2.2.1 Pengertian Modul GSM
Modul GSM merupakan sebuah perangkat yang menawarkan layanan transit SMS, mengirim pesan ke jaringan selular dari media lain atau sebaliknya, sehingga memungkinkan pengiriman atau penerimaan pesan SMS dengan atau tanpa menggunakan ponsel.Modul GSM adalah peralatan yang didesain supaya dapat digunakan untuk aplikasi komunikasi dari mesin ke mesin atau dari manusia ke mesin. Modul GSM merupakan peralatan yang digunakan sebagai mesin dalam suatu aplikasi. Dalam aplikasi yang dibuat harus terdapat mikrokontroler yang akan mengirimkan perintah kepada modul GSM berupa AT command melalui RS232 sebagai komponen penghubung (communication links). Modul GSM mempunyai fungsi yang sama dengan sebuah telepon seluler yaitu mampu melakukan fungsi pengiriman dan penerimaan SMS. Dengan adanya sebuah modul GSM maka aplikasi yang dirancang dapat dikendalikan dari jarak jauh dengan menggunakan jaringan GSM sebagai media akses.
2.2.2 Modul GSM SIM 300C EVB Dan Modem GSM
Modul GSM yang digunakan pada perancangan alat adalah tipe sim 300C EVB yang dapat di operasikan dengan menggunakan mikrokontroller, Modul GSM ini mempunyai fungsi yang sama dengan sebuah telepon seluler yaitu mampu melakukan fungsi pengiriman SMS.
Adapun bagian – bagian dari modul GSM SIM 300C EVB adalah sebagai berikut: A: port serial UTAMA untuk men-download, perintah AT transmiting, data bertukar data
B: Slot kartu SIM C: Interface headset
D: Saklar Download, mengaktifkan atau mematikan fungsi download
G: PWRKEY kunci, menghidupkan atau mematikan SIM300C H: Bagian-bagian seperti port tombol, port serial utama dan debug. I : Port Main
J: Serial port DEBUG K: Lubang untuk antena L: Sumber adaptor antarmuka M: LED sebagai lampu indikator N: Buzzer
O: Interface Headphone
P: Lubang untuk menghubungkan SIM300C dengan casing .
Gambar 2.6 Modul GSM SIM300C
2.2.3 JARINGAN GSM
GSM muncul pada pertengahan 1991 dan akhirnya dijadikan standar telekomunikasi selular untuk seluruh Eropa oleh ETSI (European Telecomunication Standard Institute). Pengoperasian GSM secara komersil baru dapat dimulai pada awal tahun
1992 karena GSM merupakan teknologi yang kompleks dan butuh pengkajian yang mendalam untuk bisa dijadikan standar. Pada September 1992, standar tipe approval untuk handphone disepakati dengan mempertimbangkan dan memasukkan puluhan item pengujian dalam memproduksi GSM. Pada awal pengoperasiannya, GSM telah
mengantisipasi perkembangan jumlah penggunanya yang sangat pesat dan arah pelayanan per area yang tinggi, sehingga arah perkembangan teknologi GSM adalah DCS (Digital Cellular System) pada alokasi frekuensi 1800 Mhz.
Alokasi spektrum frekuensi untuk GSM awalnya dilakukan pada tahun 1979. Spektrum ini terdiri atas dua buah sub-band masing-masing sebesar 25MHz, antara 890MHz - 915MHz dan 935MHz - 960MHz. Sebuah sub-band dialokasikan untuk frekuensi uplink dan band yang lain sebagai frekuensi downlink. Kedua sub-band tersebut dibagi lagi menjadi kanal -kanal, sebuah kanal pada satu sub-sub-band
memiliki pasangan dengan sebuah kanal pada sub-band yang lain. Tiap sub-band dibagi menjadi 124 kanal, yang kemudian masing -masing diberi nomor yang dikenal sebagai Absolute Radio Frequency Channel Number ( ARFCN).
Prinsip kerja dari suatu jaringan GSM adalah pembagian pelayanan menjadi daerah-daerah kecil yang disebut sel. Sel merupakan daerah layanan terkecil dalam sistem selular. Setiap sel dilayani oleh sebuah BS (Base station) yang mempunyai seperangkat peralatan pemancar dan penerima dengan beberapa kanal frekuensi untuk berkomunikasi dengan pelanggan, maka sel didefinisikan sebagai luas cakupan dari sebuah base station untuk suatu daerah daerah tertentu. Jumlah sel pada suatu daerah geografis adalah berdasarkan pada jumlah pelanggan yang beroperasi di daerah tersebut. Masing- masing BS saling terintegrasi dan dikendalikan oleh suatu MSC (Mobile Switching Center). Jangkauan pengiriman sinyal pada sistem komunikasi
Ukuran sel pada sistem seluler dapat dipengaruhi oleh: 1. Kepadatan pada trafik
2. Daya pemancar yaitu Base station dan Mobile Station (MS)
3. Dan faktor alam seperti gunung, udara, laut, gedung – gedung dan lain-lain.
Akan tetapi batasan-batasan tersebut akhirnya ditentukan sendiri oleh kuatnya sinyal radio antar Base Station (BS) dan Mobile Station (MS). Ada beberapa hal yang menjadi faktor penting dari sistem GSM. Faktor-faktor tersebut diantaranya:
1. Pemancar mempunyai daya pancar yang rendah dan cakupan yang kecil. 2. Menggunakan prinsip pengulangan frekuensi (frekuensi reuse).
3. Pembelahan sel (Cell Splitting) pada sel yang telah jenuh dengan pelanggan.
2.2.4 ARSITEKTUR JARINGAN GSM
Sebuah jaringan GSM dibangun dari beberapa komponen fungsional yang memiliki fungsi dan interface masing-masing yang spesifik. Secara umum jaringan GSM dapat dibagi menjadi 3 yaitu:
1. Mobile Station (MS) 2. Base Station Subsystem 3. Network Subsystem
Berikut ini akan dijelaskan mengenai arsitektur GSM yang merupakan gabungan dari perangkat-perangkat yang saling berkaitan dalam mendukung jaringan GSM. Fungsi dari komponen jaringan itu diantara nya:
1. Base Transceiver Station (BTS)
luas. Biasanya sebuah BTS akan memiliki beberapa transceivers (TRXs) yang memungkinkan untuk melayani beberapa frekuensi yang berbeda dan antena sel yang berbeda.
2. Mobile Switching Center
BSC membawahi satu atau lebih BTS serta mengatur trafik yang datang dan pergi dari BSC menuju MSC atau BTS. BSC memenejemen sumber radio dalam pemberian frekuensi untuk setiap BTS dan mengatur handover ketika mobile station melewati batas antar sel. MSC didesain sebagai switch ISDN (Integrated Service Digital Network) yang dimodifikasi agar berfungsi untuk jaringan seluler.
MSC juga dapat menghubungkan jaringan seluler dengan jaringan fixed. 3. Home Location Register ( HLR )
HLR merupakan database yang berisi data pelanggan yang tetap. Data tersebut antara lain, layanan pelanggan, service tambahan serta informasi mengenai lokasi pelanggan yang paling akhir (update).
4. Authentication Center (AuC)
AuC berisi database informasi rahasia yang disimpan dalam bentuk format kode. AuC digunakan untuk mengontrol penggunaan jaringan yang sah dan mencegah semua pelanggan yang melakukan kecurangan.
5. Visitor Location Register (VLR)
VLR merupakan database yang berisi informasi sementara mengenai pelanggan, terutama mengenai lokasi dari pelanggan pada cakupan area jaringan.
6. Operation and Maintance Center (OMC)
OMC sebagai pusat pengontrolan operasi dan pemeliharaan jaringan. Fungsi utamanya mengawasi alarm perangkat dan perbaikan terhadap kesalahan operasi. 7. Mobile Station (MS)
MS merupakan perangkat yang digunakan oleh pelanggan untuk dapat memperoleh layanan komunikasi bergerak. MS dilengkapi dengan sebuah smartcard yang dikenal dengan SIM (Subscriber Identity Module) yang berisi
8. Equipment Identity Register (EIR)
Equipment Identity Register (EIR) merupakan database yang berisi suatu daftar valid mobile equipment pada jaringan. Setiap mobile station diidentifikasikan dengan International Mobile Equipment Identity (IMEI). Pada kasus khusus sebuah IMEI ditandai/didaftarkan invalid bila ponsel dilaporkan dicuri/dirampas dari pemiliknya.
Gambar 2.7 Arsitektur jaringan GSM
2.2.5 Layanan SMS (Short Message Service) Pada Sistem GSM
SMS adalah layanan untuk mengirim dan menerima pesan tertulis (teks) dari maupun kepada perangkat bergerak (Mobile Device). Pesan teks yang dimaksud tersusun dari huruf, angka, atau karakter alfanumerik. Pesan teks dikemas dalam satu paket/frame yang berkapasitas maksimal 160 byte yang dapat direpresentasikan berupa 160 karakter huruf latin atau 70 karakter alfabet non-latin seperti alfabet Arab atau Cina.
sistem 2G pada umumnya) yaitu layanan suara dan switched data.Namun karena keberhasilan SMS yang tak terduga dengan ledakan pelanggan yang menggunakan nya, menjadikan SMS menjadi bagian Integral dari layanan sistem.
SMS adalah data tipe pesan asinkron yang pengiriman datanya dilakukan dengan mekanisme protokol store and forward. Hal ini berarti bahwa pengirim dan penerima SMS tidak perlu berada dalam status berhubungan (connected/online) satu sama lain ketika akan saling bertukar pesan.
Keterbatasan SMS adalah pada ukuran pesan yang dapat dikirimkan, yaitu maksimal hanya sebesar 160 byte. Keterbatasan ini disebabkan karena mekanisme transmisi SMS itu sendiri. Pada awalnya, SMS merupakan sebuah layanan yang ditambahkan pada sistem GSM yang digunakan untuk mengirimkan data mengenai konfigurasi dari handset pelanggan GSM. SMS dikirimkan menggunakan signalling frame pada kanal frekuensi atau time slot frame GSM yang biasanya digunakan untuk
mengirimkan pesan untuk kontrol dan sinyal setup panggilan telepon, seperti pesan singkat tentang kesibukan jaringan atau pesan CLI (Caller Line indentification). Frame ini bersifat khusus dan ada pada setiap panggilan telepon serta tidak dapat
digunakan untuk membawa suara atau data dari pelanggan melainkan hanya berupa pesan saja. Ukuran frame pada sistem GSM sendiri adalah sebesar 1250 bit (kurang lebih sama dengan 160 byte). Karena hanya menggunakan satu frame inilah pengiriman pesan SMS menjadi sangat murah dan terjangkau, karena beban biaya hanya dihitung dari penggunaan satu frame melalui kanal frekuensi.
Pengiriman SMS menggunakan frame pada kanal frekuensi adalah berarti SMS dikirim oleh pengirim ke nomor telepon tertentu yang bertindak sebagai SMSC (SMSCenter) dan kemudian SMSC bertugas untuk meneruskannya ke penerima. Pengiriman SMS berlangsung cepat karena, SMSC selain terhubung ke LAN aplikasi juga terhubung ke MSC (Mobile Switching Network) melalui SS7 (Signaling System 7) yang merupakan jaringan khusus untuk menangkap frame kontrol dan sinyal.
PDC ukuran pesan sms sama dengan sistem GSM ,yaitu 160 byte dan pada cdma one ukuran pesan SMS sebesar 256 byte.
Gambar 2.8 Struktur Time slot dan Frame pada GSM
Pada akhirnya SMS menjadi layanan messaging yang populer dan digemari oleh pelanggan hanphone. Layanan SMS dapat diintegrasikan dengan layanan GSM yang lain seperti suara, data, dan fax, dan karena itu pesan SMS selain digunakan untuk pengiriman pesan person to person juga digunakan untuk notifikasi suara dan pesan fax yang datangkepada pelanggan. Selain itu, SMS juga berharga murah,
bersifat pribadi, serta dalam pengoperasiannya tidak terlalu mengganggu kesibukan pemakainya, karena mereka dapat mengirim atau menerima pesan pada waktu yang mereka kehendaki.
Berdasarkan mekanisme distribusi pesan SMS oleh aplikasi SMS, terdapat empat macam mekanisme pengiriman pesan, yaitu:
a. Pull, yaitu pesan yang dikirimkan ke pengguna berdasarkan permintaan pengguna.
b. Push – event based, yaitu pesan yang diaktivasi oleh aplikasi berdasarkan kejadian yang berlangsung.
c. Push – scheduled, yaitu pesan yang diaktivasi oleh aplikasi berdasarkan waktu yang telah terjadwal.
Kini SMS tidak terbatas untuk komunikasi antar manusia pengguna saja, namun juga bisa dibuat otomatis dikirim/diterima oleh peralatan (komputer, mikrokontroler, dsb) untuk mencapai suatu tujuan tertentu. Namun untuk melakukannya, kita harus memahami dulu cara kerja SMS itu sendiri. Gambar 2.10 berikut ini adalah alur pengiriman SMS pada standar teknologi GSM.
Gambar 2.9 Alur Pengiriman SMS
Ketika pengguna mengirim SMS, maka pesan dikirim ke MSC melalui jaringan seluler yang tersedia yang meliputi tower BTS yang sedang meng-handle komunikasi pengguna, lalu ke BSC, kemudian sampai ke MSC. MSC kemudian mem-forward lagi SMS ke SMSC untuk disimpan. SMSC kemudian mengecek (lewat HLR - Home Location Register) untuk mengetahui apakah handphone tujuan sedang aktif dan dimanakah handphone tujuan tersebut.
2.2.6 Mengirim dan Menerima SMS
Dalam pengiriman /penerimaan SMS ada dua buah mode yakni modus teks dan modus PDU ( Protocol Data Unit).
a.Mode Teks
Mode ini adalah cara paling mudah untuk mengirim pesan, karena pada mode ini pesan yang dikirimkan tidak perlu dilakukan koversi lagi melainkan isi pesannya langsung dapat dikirimkan. Teks yang dikirim tetap dalam bentuk aslinya dengan panjang mencapai 160 (7 bit default alfabet) atau 140 (8 bit) karakter. Sesungguhnya mode teks adalah hasil encode yang direpresentasikan dalam format PDU. Kelemahannya, kita tidak dapat menyisipkan gambar dan nada dering ke dalam pesan yang akan dikirim serta terbatasnya dalam enkoding. Mode teks ini tidak didukung oleh semua operator GSM ataupun terminal.
b. Mode PDU ( Protocol Data Unit)
Mode PDU merupakan format pesan dalam bentuk oktet heksadesimal dan oktet semidesimal dengan panjang mencapai 160 karakter (7 bit) atau 140 karakter (8 bit). Kelebihan menggunakan mode PDU adalah kita dapat melakukan enkoding sendiri yang tentunya harus pula didukung oleh hardware dan operator GSM, melakukan kompresi data, menambahkan nada
2.2.7 AT Comman
Perintah AT ( AT Command) digunakan untuk berkomunikasi dengan terminal melalui serial port pada komputer .Dengan penggunaan perintah AT , kita dapat mengetahui kekuatan sinyal dari terminal , mengirim pesan ,menambahkan item pada buku alamat, mematikan terminal dan banyak fungsi lainnya.Setiap vendor biasanya memeberikan referensi tentang daftar referensi yang tersedia.
Komputer ataupun mikrokontroler dapat memberikan perintah AT-Command melalui hubungan kabel data serial ataupun bluetooth. AT-Command ini sebenarnya adalah pengembangan dari perintah yang dapat diberikan kepada modem Hayes yang sudah ada sejak dulu. Dinamakan AT-Command karena semua perintah diawali dengan karakter A dan T. Antar perangkat handphone dan GSM/CDMA modem bisa memiliki AT-Command yang berbeda-beda, namun biasanya mirip antara satu perangkat dengan perangkat lain. Untuk dapat mengetahui secara persis maka kita harus mendapatkan dokumentasi teknis dari produsen pembuat handphone atau GSM/CDMA modem tersebut.
Beberapa jenis perintah AT yang umum digunakan adalah sebagai berikut: 1. Mengecek apakah handphone sudah terkoneks dengan komputer
Sintaks: AT < enter >
Respon : OK : menunjukkan sudah terhubung.
ERROR : menunjukkan ada kesalahan dalam koneksi 2. Mengetahui nama vendor terminal
Sintaks :
AT+CGMI < enter >
3. Menentukan mode format Sintaks:
AT + CMGF = < Mode> < enter > Respon : OK
Format Mode :
Mode 0 : Mode PDU Mode 1 : Mode Teks 4. Mengirim Pesan
Sintaks :
AT + CMGS = < panjang PDU > < enter >>*pesan Respon: OK
5. Membaca Pesan Sintaks :
AT + CMGR=<INDEX><enter>
Respon : +CMGR:<Status>,<Isi Pesan> 6. Menghapus Pesan
Sintaks :
AT + CMGD=<index><enter> Respon : OK
2.3 Komunikasi Serial RS 232
digunakan dalam komunikasi serial adalah NRZ (Non-Return-to-Zero), di mana bit 1 dikirimkan sebagai high value dan bit 0 sebagai low value.
Komunikasi serial merupakan hal yang penting dalam system embedded, karena dengan komunikasi serial kita dapat dengan mudah menghubungkan mikrokontroler dengan devais lainnya. Port serial pada mikrokontroler terdiri atas dua pin yaitu RXD dan TXD. RXD berfungsi untuk mengirim data dari komputer atau perangkat lainnya, standard komunikasi serial untuk computer adalah RS-232, RS-232 mempunyai standard tegangan yang berbeda dengan serial port mikrokontroler, sehingga agar sesuai dengan RS-232 maka dibutuhkan suatu rangkaian level converter, IC yang digunakan bermacam-macam, tapi yang paling mudah dan sering digunakan ialah IC MAX232/HIN232. Pada prinsipnya, komunikasi serial ialah komunikasi dimana pengiriman data dilakukan per bit, sehingga lebih lambat dibandingkan komunikasi parallel seperti pada port printer yang mampu mengirim 8 bit sekaligus dalam sekali detak. Beberapa contoh komunikasi serial ialah mouse, scanner, dan system akuisisi data yang terhubung ke port COM1/COM2.
Gambar 2.11 berikut merupakan penggunaan IC MAX 232 dalam rangkaian sebagai komunikasi serial.
Gambar 2.10 MAX 232 untuk komunikasi serial
2.4 LCD ( Liquid Crystal Display)
LCD ( Liquid Crystal Display) adalah suatu jenis media tampilan yang menggunakan kristal cair sebagai penampil utama. Mikrokontroller sebagai chip miniatur dari sistem komputer, tentunya membutuhkan media penampil output layaknya sebuah monitor. Kita dapat mengkonfigurasi I/O dari chip mikro pada kit rangkaian elektronik melalui berbagai bahasa pemrograman yang mampu mengkompiler menjadi file berekstensi HEX agar dapat di flashing ke chip mikro. LCD berfungsi menampilkan suatu nilai hasil sensor, menampilkan teks, atau menampilkan menu pada aplikasi
mikrokontroler. LCD yang digunakan adalah jenis LCD M1632. LCDM1632 merupakan modul LCD dengan tampilan 16 x 2 baris dengan konsumsi daya rendah. M1632 adalah merupakan modul LCD dengan tampilan 16 x 2 baris dengan konsumsi daya yang rendah. Adapun fitur yang disajikan dalam LCD ini adalah:
a. Terdiridari 16 karakter dan 2 baris. b. Mempunyai 192 karakter tersimpan. c. Terdapat karakter generator terprogram. d. Dapat dialamati dengan mode 4-bit dan 8-bit e. Dilengkapi dengan black light.
Modul ini dilengkapi dengan mikrokontroler yang didisain khusus untuk mengendalikan LCD. Kegunaan LCD banyak sekali dalam perancangan suatu sistem dengan menggunakan mikrokontroler. LCD dapat berfungsi untuk menampilkan suatu nilai hasil sensor, menampilkan teks, atau menampilkan menu pada aplikasi mikrokontroler.
Gambar 2.11 LCD 2 x 16
Pada bab ini kita akan membahas antar muka LCD dengan mikrokontroller ATMega8535. Gambar 2.12 berikut ini adalah Pin LCD M1632.
Urutan pin (1), umumnya, dimulai dari sebelah kiri (terletak di pojok kiri atas) dan untuk LCD yang memiliki 16 pin, 2 pin terakhir (15 & 16) adalah anoda dan katoda untuk back-lighting.
Tabel 2.1 Fungsi pin-pin pada Liquid Crystal Display
Sebagaimana terlihat pada kolom deskripsi (symbol and functions), interface LCD merupakan sebuah parallel bus, dimana hal ini sangat memudahkan dan sangat cepat dalam pembacaan dan penulisan data dari atau ke LCD. Kode ASCII yang ditampilkan sepanjang 8 bit dikirim ke LCD secara 4 atau 8 bit pada satu waktu. Jika mode 4 bit yang digunakan, maka 2 nibble data dikirim untuk membuat sepenuhnya 8 bit (pertama dikirim 4 bit MSB lalu 4 bit LSB dengan pulsa clock EN setiap nibblenya)
bersihkan layar, posisi kursor dll). Ketika RS dalam kondisi high atau 1, data yang dikirimkan adalah data ASCII yang akan ditampilkan dilayar. Misal, untuk menampilkan huruf pada layar maka RS harus diset ke 1. Jalur kontrol R/W harus berada dalam kondisi low (0) saat informasi pada data bus akan dituliskan ke LCD.
Apabila R/W berada dalam kondisi high (1), maka program akan melakukan query (pembacaan) data dari LCD. Instruksi pembacaan hanya satu, yaitu Get LCD status (membaca status LCD), lainnya merupakan instruksi penulisan. Jadi hampir setiap aplikasi yang menggunakan LCD, R/W selalu diset ke 0. Jalur data dapat terdiri 4 atau 8 jalur (tergantung mode yang dipilih pengguna), mereka dinamakan DB0, DB1, DB2, DB3, DB4, DB5, DB6 dan DB7. Mengirim data secara parallel baik 4 atau 8 bit merupakan 2 mode operasi primer. Untuk membuat sebuah aplikasi interface LCD, menentukan mode operasi merupakan hal yang paling penting
Mode 8 bit sangat baik digunakan ketika kecepatan menjadi keutamaan dalam sebuah aplikasi dan setidaknya minimal tersedia 11 pin I/O (3 pin untuk kontrol, 8 pin untuk data). Sedangkan mode 4 bit minimal hanya membutuhkan 7 bit (3 pin untuk kontrol, 4 untuk data). Aplikasi dengan LCD dapat dibuat dengan mudah dan waktu yang singkat, mengingat koneksi parallel yang cukup mudah antara kontroller dan LCD. Gambar 2.14 berikut adalah contoh LCD (2×16) yang umum digunakan :
Gambar 2.13 LCD M1632
2.5 Keypad
pada pin GPIO dari mikro, namun karena keterbatasan pin yang ada, maka diperlukan sebuah teknik untuk mengatasi masalah keterbatasan pin tersebut namun tetap dapat mengakomodir keperluan untuk memasukan data secara lengkap.Untuk media input data numerik yang menggunakan 10 hingga 16 buah tombol bisa dilakukan dengan mengunakan teknik Multiplex Matrix Keypad. Tombol – tombol tersebut disusun sedemikian rupa membentuk sebuah matrik sehingga untuk semua tombol tersebut bisa dikontrol hanya dengan mengunakan 7-8 pin saja. Berikut contoh susunan matriksnya :
Gambar 2.14 Keypad dengan matrix 4x4
2.6 Photodioda
Photodioda adalah dioda yang bekerja berdasarkan intensitas cahaya,jika photodioda terkena cahaya maka photodioda akan bekerja seperti dioda pada umumnya , tetapi jika tidak mendapat cahaya maka photodioda akan berperan seperti resistor dengan nilai tahanan yang besar sehingga arus listrik tidak dapat mengalir. Photodioda merupakan sensor cahaya semi konduktor yang dapat mengubah besaran cahaya menjadi besaran listrik.
Photodioda merupakan sebuah dioda denga sambungan p-n yang dipengaruhi cahaya dalam kerjanya, cahaya yang dapat dideteksi oleh photodioada ini mulai dari cahaya inframerah ,cahaya tampak, ultra ungu sampai sinar-X, photodioda memiliki prinsip kerja sebagai berikut, karena photodioda terbuat dari semikonduktor p-n junction maka cahaya yang diserap oleh photodioda akan menyebabkan terjadinya pergeseran foton yang akan menghasilkan pasangan elektron hole dikedua sisi dari sambungan, ketika elektron-elektron yang dihasilkan itu masuk ke pita konduksi maka elektron-elektron itu akan mengalir kearah positive sumber tegangan sedangkan hole yang dihasilkan akan mengalir kearah negatif sumber tegangan sehingga arus akan mengalir kedalam rangkaian. Besarnya pasangan elektron ataupun hole yang dihasilkan tergantung dari besarnya intensitas cahaya yang diserap oleh photodioda.
Sifat-sifat dari photodioda adalah sebagai berikut, jika terkena cahaya maka resistansinya akan berkurang , dan jika tidak terkena cahaya maka resistansinya akan meningkat. Bisanya photodioda dipasang reverse ,bedasarkan teori mengenai dioda pada saat dioda dipasang reverse , maka arus tidak akan mengalir karena hambatan yang sangat besar sekali , jadi pada kondisi ini dioda dikatakan sebagai kondisi open circuit ( saklar ) ,namun pada photo dioda hambatan yag besar tadi bisa menjadi