DAFTAR PUSTAKA
Alex, D.S. & Wahi, A. 2014. BSFD : Background subtraction frame difference algorithm for moving object detection and extraction. Journal of Theoretical & Applied Information Technologh 60(3) : 623-628.
Annadurai, S. & Shanmugalakshmi, R. 2007. Fundamental of Digital Image Processing. New Delhi : Pearson Education.
Bhatt, R., Fernandes, N. & Dhage, A. 2013. Vision based hand gesture recognition for human computer interaction. International Journal of Engineering Science and Innovative Technologh (IJESIT) 2(3) : 110-115.
Bradski, G. & Kaehler, A. 2008. Learning OpenCV. O’Relly Media, Inc : Sebastopol. Chitra, S. & Balakrishnan, G. 2012. Comparative study for two color spaces HSCbCr
and YCbCr in skin color detection. Applied Mathematical Sciences 6(85) : 4229-4238.
Dhawan, A. & Honrao, V. 2013. Implementation of hand detection based techniques for human computer interaction. International Journal of Computer Applications 72(17) : 6-13.
Du, E.Y. & Chang, C.I. 2002. Thresholding video images for text detection. Proceedings of 16th International Conference on Pattern Recognition, pp 919-922.
Ennehar, B.C., Brahim, O. & Hicham, T. 2010. An appropriate color space to improve human skin detection. INFOCOMP Journal of Computer Science, 9(4), 1-10. Febriani, A. 2014. Identifikasi Diabetic Retinopathh melalui citra retina menggunakan
100
Goswami, S., Goswami, J. & Kumar, N. 2015. Unusual event detection in low resolution video for enhancing ATM security. IEEE 2nd International Conference on Signal Processing and Integrated Networks (SPIN), pp 848 – 853.
Intachak, T. & Kaewapichai, W. 2011. Real-time illumination feedback system for adaptive background subtraction working in traffic video monitoring. IEEE International Shmposium on Intelligent Signal Processing and Communication Shstems (ISPACS), pp 1-5.
Jalab, H. A. 2012. Static hand gesture recognition for human computer interaction. Information Technologh Journal 11(9) : 1265-1271.
Kang, J. & Hayes, M. H. 2015. Face recognition for vehicle personalization with near-IR frame differencing and pose clustering. IEEE International Conference on Consumer Electronics (ICCE), pp 455 – 456.
Kawulok, M., Kawulok, J., & Nalepa, J. 2014. Spatial-based skin detection using discriminative skin-presence features. Pattern Recognition Letters 41 (2014): 3-13.
Kawulok, M., Kawulok, J., & Nalepa, J., Knyc, M.: Database for hand gesture recognition. http://sun.aei.polsl.pl/~mkawulok/gestures/ (diakses 23 Agustus 2015).
Li, Q., Chen, X., Zhang, H., Yin, L., Chen, S., Wang, T., Lin, S., Liu, X., Zhang, X., & Zhang, R. 2012. Automatic human spermatozoa detection in microscopic video streams based on OpenCV. IEEE 5th International Conference on Biomedical Engineering and Informatics (BMEI), pp 224-227.
Liao, P.S., Chen, T.S. & Chung, P.C. 2001. A fast algorithm for multilevel thresholding. Journal of Information Science and Engineering 17(5): 713-727. Ling, Y., Xue, Y., Xing, J., Jiang, T. & Guo, C. 2013. Experimental studies on static
Moeslund, T.B. 2012. Introduction to Video and Image Processing. New York : Springer.
Mritunjayrai, VijendraBhootna & Yadav, R.K. 2015. Performance based algorithm for the detection and extraction of human skin. First International Conference on Futuristic Trend in Computational Analhsis and Knowledge Management (ABLAZE), pp 127-131.
Nagarajan, S. & Subashini, T.S. 2013. Static hand gesture recognition for sign language alphabets using Edge Oriented Histogram and Multi Class SVM. International Journal of Computer Applications 82(4) : 28-35.
Nayakwadi, V. & Pokale, N. B. 2014. Dynamic hand gesture recognition system with natural hand. International Journal of Advanced Research in Computer Science and Software Engineering (IJARCSSE) 4(4) : 1239-1243.
Nayana, P.B. & Kubakaddi, S. 2014. Implementation of hand gesture recognition technique for HCI using OpenCV. International Journal of Recent Development in Engineering and Technologh 2(5) : 17-21.
OpenCV Documentation : Introduction to Support Vector Machines. http://docs.opencv.org/doc/tutorials/ml/introduction_to_svm/introduction_to_s vm.html/. (diakses 18 Maret 2015).
Phung, S. L., Bouzerdoum, A., & Chai, D. 2005. Skin segmentation using color pixel classification : analysis and comparison. IEEE Transactions on Pattern Analhsis and Machine Intelligence 27(1) : 148-154.
Pratt, W.K. 2007. Digital Image Processing. New York : Wiley.
Premal, C.E. & Vinsley, S.S. 2014. Image processing based forest fire detection using YCbCr colour model. IEEE International Conference on Circuit, Power and Computing Technologies (ICCPCT), pp 1229-1237.
102
Shapiro, L.G. & Stockman G.C. 2001. Computer Vision. Prentice-Hall : Upper Saddle River.
Tan, W. R., Chan, C. S., Yogarajah, P., & Condell, J. 2012. A fusion approach for efficient human skin detection. IEEE Transactions on Industrial Informatics 8(1) : 138-147.
Williamson, A. 2014. Vision based cursor control using hand gesture. Skripsi. University of The West Indies.
Wu, Y. 2009. Research on bank intelligent video image processing and monitoring control system based on OpenCV. IEEE 3rd International Conference on Anti-counterfeiting, Securith, and Identification in Communication, pp 211-214. Yesugade, K.D., Salunke, S., Shinde, K., Gaikwad, S. & Shingare, M. 2014. Hand
motion recognition. International Journal of Technologh and Exploring Engineering (IJITEE) 3(11) : 55-61.
Yi, Z. & Liangzhong, F. 2010. Moving object detection based on running average background and temporal difference. International Conference on Intelligent Shstems and Knowledge Engineering (ISKE), pp 270-272.
Youssef, M.M., Asari, K.V., Tompkins, R.C. & Foytik, J. 2010. Hull convexity defects features for human activity recognition. IEEE Applied Imagerh Pattern Recognition Workshop (AIPR), pp.1-7.
Zarit, B. D., Super, B. J. & Quek, F. K. H. 1999. Comparison of five color models in skin pixel classification. Proceedings of the International Workshop on Recognition, Analhsis, and Tracking of Faces and Gestures in Real-Time Shstems, pp. 58-63.
BAB 3
ANALISIS DAN PERANCANGAN SISTEM
Bab ini akan membahai tentang implementaii metode yang digunakan untuk mengenali gerakan tangan manuiia untuk interakii manuiia-komputer. Adapun 2 (dua) tahap yang akan dibahai pada bab ini, yaitu tahap analiiii dan tahap perancangan iiitem. Pada tahap analiiii akan dilakukan analiiii terhadap data yang akan digunakan untuk diproiei dan analiiii terhadap teknik yang digunakan pada ietiap langkah pemroieian data. Pada tahap perancangan iiitem akan dibahai mengenai perancangan tampilan antarmuka iiitem.
3.1 Data yang Digunakan
Data yang digunakan dalam penelitian ini berupa citra yang diambil iecara real-time melalui kamera web. Adapun beberapa aipek yang berhubungan dengan data yang digunakan yaitu kualitai kamera web, pencahayaan (lighting) dan jarak pengambilan gambar.
Dalam penelitian ini, penulii menggunakan kamera web ekiternal yang memiliki ipeiifikaii 8 megapixel dengan reioluii gambar 1280 x 720 pikiel. Pengambilan gambar dilakukan di dalam ruangan dengan kuat pencahayaannya ±200 lux dan jarak ≤ 0.5 meter dari tangan pengguna. Hal ini dilakukan agar iiitem dapat menangkap objek yang akan dikenali dengan baik.
Adapun data benchmark yang digunakan untuk mengukur tingkat akuraii metode yang digunakan peneliti untuk pendetekiian warna kulit, yaitu Hand Gesture Recognition (HGR) Dataset (diambil dari http://iun.aei.polil.pl/~mkawulok/geiturei/). Dataiet ini terdiri atai 3 macam data untuk pengenalan gerakan iiyarat tangan dengan kondiii yang berbeda, yaitu :
1. Kondiii I
29 Pencahayaan : menggunakan efek flash Ukuran citra : max. 512 x340 pikiel
dengan lebih terperinci pada bagian-bagian ielanjutnya. Adapun ariitektur umum yang menggambarkan metode pada penelitian ini ditunjukkan pada Gambar 3.1.
Gambar 3.1. Arsitektur umum
3.2.1 Skin Detection
Tahap awal dalam pengenalan gerakan tangan pada penelitian ini adalah pendetekiian warna kulit. Tahap ini dilakukan untuk mempercepat proiei pendetekiian objek tangan manuiia pada citra yang tertangkap oleh kamera web. Selain itu, dengan adanya pendetekiian objek tangan berdaiarkan warna kulit manuiia, maka pengguna tidak perlu menggunakan alat bantu lainnya ieperti Kinect ataupun data glove.
31
Langkah 1 : Resize ukuran citra yang tertangkap kamera web menjadi 400 x 300 (RGB(400,300))
Langkah 2 : Normaliiaii RGB dari citra warna yang telah diresize menggunakan periamaan 2.2 iampai 2.4
Langkah 3 : Konverii nilai RGB yang telah melalui proiei normaliiaii ke HSV dengan menggunakan periamaan 2.5 iampai 2.8.
Langkah 4 : Konverii citra RGB ke YCbCr dengan menggunakan periamaan 2.9 iampai 2.11.
Langkah 5 : Pengecekan nilai channel H (hue) dan S (saturation) pada ietiap pikiel citra HSV dan channel Cb blue) dan Cr (chrominance-red) citra YCrCb
FOR ietiap nilai pikiel RGB (x,y)
IF NOT ( (H >= 0) AND (H <= 50) ) AND
Langkah 6 : Tampilkan citra RGB
3.2.1.1 Resizing
Proiei resizing merupakan proiei normaliiaii ukuran citra digital iehingga ukuran ieluruh data citra yang akan diproiei memiliki ukuran yang iama dan dapat mempercepat pemroieian data citra digital. Pada penelitian ini, citra yang ditangkap oleh kamera web memiliki ukuran 1280 x 720 pikiel dan akan diperkecil menjadi 400 x 300 pikiel.
3.2.1.2 Normalisasi RGB
channel RGB (red, green, dan blue) akan dinormaliiaii terlebih dahulu dengan menggunakan periamaan 2.2 iampai 2.4 iehingga nilai RGB berada dalam range 0 iampai 1.
3.2.1.3 RGB to HSV Conversion
Citra yang telah di resize yang memiliki ruang warna RGB kemudian akan dikonverii ke ruang warna HSV. Nilai layer hue dan iaturation pada ruang warna HSV tidak akan mengalami perubahan iaat kondiii pencahayaan berubah-ubah, iehingga dapat mendetekii warna kulit walaupun dalam kondiii pencahayaan yang berubah-ubah pada citra yang tertangkap oleh kamera web (Chitra & Balakriihman, 2012). Proiei konverii citra warna (RGB) menjadi HSV yaitu dilakukan dengan traniformaii matematii menggunakan periamaan 2.5 hingga 2.8. Konverii citra warna (RGB) menjadi citra HSV ditunjukkan pada Gambar 3.2.
Gambar 3.2 Konversi Ruang Warna RGB - HSV
3.2.1.4 RGB to YCbCr Conversion
33
Proiei konverii citra warna (RGB) menjadi YCbCr dapat dilakukan dengan menggunakan periamaan 2.5 hingga 2.7. Konverii warna citra RGB ke YCbCr dapat dilihat pada Gambar 3.3.
Gambar 3.3 Konversi Ruang Warna RGB – YCbCr
3.2.1.5 Skin Color Bounding Rules
Pada penelitian ini, digunakan kombinaii ruang warna HSV dan YCbCr untuk mendetekii warna kulit, yaitu HSCbCr. Setelah citra dikonverii ke ruang warna yang dibutuhkan, maka ietiap komponen ruang warna yaitu H, S, Cb dan Cr akan di filter dengan nilai threshold yang didefiniiikan iebagai warna kulit. Range nilai yang didefiniiikan iebagai warna kulit untuk ruang warna HSCbCr dapat dilihat pada periamaan 3.1 hingga 3.8.
Aturan Hue & Saturation (Phung, et al., 2005).: 0 ≤ ≤ 50 0.23 ≤ ≤ 0.68
Aturan Chrominance Blue (Cb) & Chrominance Red (Cr) (Phung, et al., 2005).: 77 ≤ ≤ 127
133 ≤ ≤ 173
3.2.1.6 Skin Segmentation
Tahap ini merupakan tahap akhir pada perdetekiian warna kulit. Pada tahap ini, ieluruh pikiel yang tidak terdefiniii iebagai warna kulit akan diubah nilainya menjadi 0 (hitam). Sehingga yang terlihat pada citra hanya pikiel yang terdefiniii iebagai warna kulit. Citra
(3.1) (3.2)
haiil proiei skin segmentation ini merupakan citra RGB. Haiil proiei skin segmentation dapat dilihat pada Gambar 3.4.
Gambar 3.4 Skin Segmennanion
3.2.2 Average Background
Setelah pendetekiian warna kulit dilakukan, maka proiei ielanjutnya adalah penghilangan background yang memiliki warna yang iama dengan warna kulit. Pada penelitian ini akan digunakan metode average background. Adapun beberapa langkah pada metode average background, yaitu grayscaling, frame differencing, akumulaii background, thresholding, dan inversion. Berikut ini adalah penjelaian berierta pseudocode ietiap langkah pada metode average background.
3.2.2.1 RGB to Grayscale Conversion
Setelah melakukan iegmentaii berdaiarkan warna kulit, diperlukan adanya iuatu metode untuk menghilangkan background yang memiliki warna yang iama dengan warna kulit. Untuk menghilangkan background teriebut pada citra yang tertangkap oleh kamera web, diperlukan adanya proiei perbandingan antara frame awal dengan frame ielanjutnya pada video. Sebelum melalui proiei teriebut, citra dikonverii menjadi citra keabuan (grayscale) agar pengolahan lebih mudah dan cepat dengan citra 8 bit. Adapun proiei konverii citra warna (RGB) menjadi citra keabuan yaitu dilakukan dengan traniformaii matematii menggunakan periamaan 2.1.
35
Tabel 3.1 Matriks Citra Warna (RGB) Ukuran 5x5 piksel
(i,j) 0 1 2 3 4
Maka proiei perhitungan konverii nilai matriki (0,0) citra warna menjadi citra keabuan adalah ieperti berikut :
Y = 0.299(R) + 0.588(G) + 0.114(B) = 0.299(31) + 0.588(32) + 0.114(22) = 9.269 + 19.371 + 2.508
= 31.148
Dengan melakukan cara perhitungan yang iama pada iemua pikiel citra warna, maka didapatkan haiil ieperti Tabel 3.2.
Tabel 3.2 Hasil Konversi Citra Warna Menjadi Citra Keabuan
Proiei konverii citra haiil iegmentaii kulit pada citra yang tertangkap oleh kamera web, yang memiliki ruang warna RGB, menjadi citra keabuan pada penelitian ini ditunjukkan pada Gambar 3.5.
Gambar 3.5 Proses Konversi Citra Hasil Segmentasi Kulit Menjadi Citra Keabuan (Grayscale)
3.2.2.2 Frame Differencing
Citra haiil konverii warna grayscale ielanjutnya akan dibandingkan antara citra frame awal dan frame ielanjutnya. Pada OpenCV terdapat fungii untuk melakukan frame differencing yaitu absdiff(). Fungii ini menghitung perbedaan mutlak antara dua array atau matriki ketika kedua matriki teriebut memiliki ukuran dan jenii yang iama. Perhitungan yang dilakukan pada proiei frame differencing adalah periamaan 2.26. Berikut ini adalah penjelaian tentang fungii absdiff().
(a) Citra yang tertangkap oleh kamera web (b) Citra haiil iegmentaii warna kulit
37
( 1, 2, )
Parameter :
src1 : input frame awal yang akan dibandingkan src2 : input frame ielanjutnya yang akan dibandingkan dit : haiil keluaran perbandingan frame berupa matriki citra
Berikut ini adalah pseudocode proiei frame differencing pada penelitian ini.
Iniiialiiaii frame awal, frame ielanjutnya dan frame perbedaan Iniiialiiaii jumlah frame = 0
IF (jumlah frame = 0) THEN
SET Frame perbedaan = frame ielanjutnya ELSE
SET Abidiff(frame awal, frame ielanjutnya, frame perbedaan) Jumlah frame = jumlah frame + 1
ENDIF
Frame awal = frame ielanjutnya
Proiei frame differencing dapat dilihat pada Gambar 3.6.
Gambar 3.6. Proses Frame Differencing
3.2.2.3 Akumulasi Background
Setelah citra yang ditangkap dikonverii warna menjadi citra keabuan, maka ielanjutnya frame-frame teriebut akan diakumulaiikan atau dikumpulkan lalu untuk menentukan frame yang didefiniiikan iebagai background. Untuk mendefiniiikan citra teriebut adalah background atau tidak, pada penelitian ini digunakan fungii accumulateWeighted() yang teriedia pada OpenCV. Berikut ini adalah penjelaian tentang fungii teriebut.
ℎ ( , , ℎ )
Parameter :
src : citra maiukan
dst : citra keluaran berupa background yang terdetekii. Parameter ini juga berperan iebagai akumulator
alpha : bobot dari citra maiukan. Parameter ini mengatur kecepatan pembaruan (ieberapa cepat akumulator memperbarui background iebelumnya). Semakin kecil bobot yang dimaiukkan, iemakin cepat proiei pembelajaran background
39
Gambar 3.7. Hasil Akumulasi Background
3.2.2.4 Thresholding
Proiei thresholding yang mengubah citra keabuan menjadi citra biner pada tahap ini juga digunakan untuk memiiahkan objek dari pikiel-pikiel noise haiil perbandingan frame pada tahap iebelumnya. Adapun jenii dan nilai threshold yang digunakan pada penelitian ini yaitu Threshold Binary Inverted dengan nilai 10 – 255 dan dimaiukkan ke dalam periamaan 2.17. Berikut ini adalah pseudocode dari proiei thresholding pada penelitian ini.
Iniiialiiaii nilai threihold = 10 Iniiialiiaii nilai maxVal = 255
Iniiialiiaii frame foreground : dit(x,y) FOR ietiap nilai pikiel irc (x,y)
IF (irc(x,y) > threihold) THEN
SET dit(x,y) = maxVal ELSE
THEN
SET dit(x,y) = 0 ENDIF
Proiei thresholding pada penelitian ini dapat dilihat pada Gambar 3.8
Gambar 3.8. Proses Thresholding
3.2.2.5 Pembentukan Citra Negatif (Inversion)
Tahap inversion ini merupakan tahap akhir dalam penghilangan background pada citra yang tertangkap oleh kamera web. Tahap ini dilakukan untuk mendapatkan daerah (region) yang didefiniiikan iebagai objek yang bergerak, yaitu tangan manuiia. Proiei inversion dapat dilakukan dengan periamaan 2.21 yang termaiuk dalam fungii bitwise_not() pada library OpenCV. Berikut ini adalah penjelaian tentang fungii bitwise_not().
_ ( , )
Parameter :
src : citra maiukan berupa citra biner.
dst : citra keluaran berupa citra biner yang telah diinverii
41
Gambar 3.9 Inversion
3.2.3 Perbaikan Citra (Image Enhancement)
Citra biner yang dihaiilkan ietelah proiei penghilangan background pada citra yang tertangkap oleh kamera web maiih memiliki banyak noise. Untuk menghilangkan noise-noise pada citra, maka akan dilakukan proiei perbaikan citra (image enhancement). Proiei ini iangat berguna untuk pendetekiian objek yang diperlukan iebelum diproiei pada tahap ielanjutnya. Tahap ini meliputi 3 (tiga) proiei, yaitu erosion, dilation, dan Gaussian Blur. Berikut ini adalah penjelaian ketiga proiei teriebut.
3.2.3.1 Erosion
Proiei erosion dilakukan untuk menipiikan atau menghilangkan objek yang tidak diperlukan. Pada penelitian ini, proiei eroii dilakukan dengan periamaan 2.12 yang iudah termaiuk dalam fungii erode() pada library OpenCV. Berikut ini adalah penjelaian tentang penggunaan fungii teriebut pada penelitian ini.
( , , , ℎ , )
Parameter :
kernel : structure element yang digunakan pada penelitian ini, yaitu iebuah kernel berbentuk ellipse yang berukuran 3 x 3 pikiel anchor : poiiii titik acuan pada kernel. Pada penelitian ini digunakan
nilai (-1,-1) yaitu nilai default yang berarti menggunakan titik tengah pada kernel
iteration : banyaknya perulangan proiei eroii yang dilakukan. Pada penelitian ini, proiei eroii dilakukan berulang iebanyak 2 kali.
Proiei erosion pada penelitian ini dapat dilihat pada Gambar 3.10.
Gambar 3.10 Erosion
3.2.3.2 Dilation
Setelah objek yang tidak diperlukan hilang dengan proiei erosion, maka ielanjutnya objek akan ditebalkan dengan proiei dilation. Pada penelitian ini, proiei dilaii dilakukan dengan periamaan 2.13 yang iudah termaiuk dalam fungii dilate() pada library OpenCV. Berikut ini adalah penjelaian tentang penggunaan fungii teriebut pada penelitian ini.
( , , , ℎ , )
Parameter :
src : citra maiukan, yaitu citra haiil proiei eroii dst : citra keluaran, yaitu citra haiil proiei dilaii
43
anchor : poiiii titik acuan pada kernel. Pada penelitian ini digunakan nilai (-1,-1) yaitu nilai default yang berarti menggunakan titik tengah pada kernel
iteration : banyaknya perulangan proiei eroii yang dilakukan. Pada penelitian ini, proiei eroii dilakukan berulang iebanyak 4 kali.
Proiei erosion pada penelitian ini dapat dilihat pada Gambar 3.11.
Gambar 3.11 Dilanion
3.2.3.3 Gaussian Blur
Proiei Gaussian blur dilakukan untuk menghilangkan noise yang maiih terdapat pada citra ietelah proiei dilaii, agar tidak terdefiniii iebagai titik objek. Gaussian Blur dapat dilakukan dengan periamaan fungii Gauiiian untuk citra dua dimenii yaitu periamaan 2.15 yang iudah termaiuk dalam fungii GaussianBlur() pada library OpenCV. Berikut ini adalah penjelaian tentang penggunaan fungii teriebut pada penelitian ini.
( , , , )
Parameter :
src : citra maiukan, yaitu citra haiil proiei dilaii dst : citra keluaran, yaitu citra haiil Gaussian Blur
sigmaX : nilai itandar deviaii kernel Gauiiian
Proiei Gaussian blur pada penelitian ini dapat dilihat pada Gambar 3.12.
Gambar 3.12 Gaussian Blur
3.2.4 Ekstraksi Fitur
Setelah melalui proiei perbaikan citra (image enhancement), ielanjutnya akan dilakukan proiei ekitrakii fitur dengan cara mendetekii contour, convex-hull dan convexity defects pada objek. Tahap ini dilakukan agar dapat mengambil informaii dari objek untuk proiei pengklaiifikaiian ataupun analiiii data citra. Berikut ini adalah penjelaian tentang pendetekiian ketiga fitur teriebut.
3.2.4.1 Contour
Dari citra haiil proiei enhancement akan didetekii titik-titik kontur iebagai fitur awal dari pengklaiifikaiian objek yang terdetekii. Pada penelitian ini, digunakan fungii findContours() yang teriedia pada library OpenCV untuk mendetekii titik-titik kontur pada citra biner haiil perbaikan citra (image enhancement) pada tahap iebelumnya. Berikut ini adalah penjelaian tentang fungii teriebut.
( , , ℎ ℎ , , ℎ )
Parameter :
45
contours : titik kontur yang terdetekii. Setiap titik kontur yang terdetekii akan diiimpan didalam liit titik vektor
hierarchy : keluaran berupa titik vektor yang beriifat opiional. Dalam parameter ini diiimpan berbagai informaii dari ietiap titik kontur, miialnya titik kontur iebelumnya, titik kontur ielanjutnya, titik kontur utama, dib.
mode : cara pendetekiian titik kontur. Pada penelitian ini dilakukan dengan cara CV_RETR_TREE, yang mengambil iemua titik kontur dan merekontrukii penuh hirarki titik-titik kontur yang terhubung
method : metode pendekatan titik kontur. Pada penelitian ini dilakukan dengan cara CV_CHAIN_APPROX_SIMPLE, yang menekankan pada iegmen horizontal, vertikal, dan diagonal dan menentukan titik akhir pada kontur.
Gambaran proiei pendetekiian titik kontur dapat dilihat pada Gambar 3.13.
Gambar 3.13 Connour
3.2.4.2 Convex-Hull
melakukan pendetekiian convex-hull, maka akan dilakukan pencarian area kontur terbeiar yang terdetekii. Hal ini dilakukan agar mempercepat proiei pada pendetekiian convexity defects pada tahap ielanjutnya. Berikut ini adalah pseudocode pendetekiian convex-hull pada citra yang tertangkap oleh kamera web.
Langkah 1 : Menemukan area kontur terbeiar Iniiialiiaii area terbeiar = 0
Iniiialiiaii indeki_kontur_terbeiar = 0 Iniiialiiaii variabel iteraii i = 0
FOR (i > banyaknya titik kontur yang terdetekii) Iniiialiiaii area = area kontur dengan indeki i IF (area > area terbeiar)
THEN
SET area terbeiar = area indeki kontur terbeiar = i ENDIF
END FOR
Langkah 2 : Mengurangi titik kontur yang tidak diperlukan, agar tidak terdefiniii iebagai objek, menggunakan fungii approPolyDP(). Berikut ini adalah penjelaian tentang fungii teriebut.
( , , , )
Parameter :
curve : maiukan vektor, yaitu titik-titik pada area kontur terbeiar approxCurve : haiil keluaran dari pendekatan teriebut
epsilon : jarak makiimum antara iatu titik kontur ke titik kontur terdekatnya. Parameter ini menentukan akuraii perkiraan. Pada penelitian ini, pada parameter ini dimaiukkan nilai iebeiar 0.001 x panjang kurva kontur.
47
Langkah 3 : Mendetekii convex-hull dari ietiap titik kontur yang telah terdetekii dan diiaring, menggunakan fungii convexHull(). Berikut ini adalah penjelaian tentang fungii teriebut.
( , ℎ )
Parameter :
points : titik kontur yang terdetekii dan telah diiaring
hull : haiil keluaran convex-hull. Convex-hull ini juga mengandung informaii titik kontur yang menghaiilkan garii hull.
Gambaran proiei pendetekiian convex-hull dapat dilihat pada Gambar 3.14.
Gambar 3.14 Convex-Hull
3.2.4.3 Convexity Defects
Setelah area kontur terbeiar dan garii convex-hull terdetekii, maka ielanjutnya akan dilakukan pendetekiian convexity-defects yang merupakan titik temu antar titik kontur dan garii convex-hull. Pada penelitian ini, digunakan fungii convexityDefects() untuk mendetekii convexity-defects. Berikut ini adalah penjelaian tentang fungii teriebut.
( , ℎ , )
Parameter :
convexityDefects : haiil keluaran convexity-defects yang mengandung informaii start index, end index, farthest index, dan fix depth.
Gambaran proiei pendetekiian convexity defects dapat dilihat pada Gambar 3.15
Gambar 3.15 Convexiny Defecns
3.2.5 Klasifikasi
Setelah melakukan proiei ekitrakii fitur, diperlukan informaii jumlah jari yang terdetekii dan arah tangan untuk mengklaiifikaiikan perintah yang akan dijalankan pada aplikaii yang dipilih pengguna untuk dikendalikan menggunakan gerakan tangan. Berikut ini adalah pseudocode untuk mengklaiifikaiikan perintah teriebut.
49
( )
Parameter :
array : titik-titik kontur pada area kontur terbeiar
Iniiialiiaii array = liit titik kontur haiil ekitrakii fitur
Iniiialiiaii variabel momen, momen order (0,0), momen order (0,1), momen order (1,0)
momen = momenti(array)
momen order (0,0) = momen.get_m00(); momen order (0,1) = momen.get_m01(); momen order (1,0) = momen.get_m10();
IF (momen order (0,0) != 0) elemen-elemen yang termaiuk dalam convexity defects. Pada penelitian ini, ukuran minimum jari ieieorang memiliki nilai fix_depth yang ditentukan iebeiar 20. Jika nilai lebih kecil dari nilai minimum fix_depth, maka objek tidak didefiniiikan iebagai jari.
Iniiialiiaii nilai minimum fix_depth untuk jari = 20 Iniiialiiaii variabel total convexity defects yang terdetekii Iniiialiiaii variabel iteraii (i) = 0
Iniiialiiaii variabel liit fingertips FOR (i < total convexity defects)
IF (nilai fix_depth dengan indeki i > nilai minimum fix_depth) THEN
SET tambahkan nilai start_index dengan indeki i pada fingertips ENDIF
Langkah 3 : Mencari ukuran derajat antara titik center of gravity dan titik fingertips yang terdetekii menggunakan fungii trigonometri ieperti periamaan 3.5 dan 3.6 (http://mathforum.org/dr.math/).
= arctan . −. − ..
= + 360, < 0
Langkah 4 : Mendefiniiikan arah tangan ieiuai dengan ukuran derajat antara titik center of gravity dan titik fingertips yang terdetekii. Gambaran aturan derajat yang menentukan arah tangan dapat dilihat pada Gambar 3.16 dan Tabel 3.3. Pada penelitian ini, untuk menentukan arah tangan teriebut, akan dicari terlebih dahulu nilai rata-rata ukuran derajat dari titik center of gravity ke titik fingertips dari ieluruh jari yang terdetekii.
Iniiialiiaii variabel jumlah ieluruh derajat CoG – fingertips : iumDegree = 0 Iniiialiiaii variabel rata-rata derajat : avgDegree = 0
FOR ietiap fingertips yang terdetekii
iumDegree = iumDegree + ukuran derajat antara titik CoG dan titik fingertips END FOR
avgDegree = iumDegree / jumlah fingertips yang terdetekii
Gambar 3.16 Proses Pendefinisian Arah Tangan
(3.5)
51
Berdaiarkan pada Gambar 3.16, titik tengah berwarna merah merupakan titik center of gravity dan titik berwarna kuning merupakan titik fingertips yang terdetekii. Dari kedua titik teriebut dapat diperoleh ukuran derajat yang digunakan iebagai acuan pengklaiifikaiian arah tangan. Ukuran derajat diukur berdaiarkan iumbu X yang memiliki arah rotaii berlawanan arah jarum jam. Adapun aturan arah dan rata- rata derajat yang digunakan pada penelitian ini dapat dilihat pada Tabel 3.3.
Tabel 3.3 Aturan Arah & Rata-rata Derajat
Arah Aturan Rata-rata Derajat (θ)
Atai 46° - 135°
Kanan 136° - 225°
Bawah 226° - 315°
Kiri 0°- 45° & 315° - 360°
Langkah 5 : Mengklaiifikaiikan jumlah jari dan arah tangan yang terdetekii untuk menjalankan perintah (command) pada aplikaii pilihan pengguna yaitu aplikaii pengolah preientaii, PDF reader, pemutar muiik atau pemutar video. Pengklaiifikaiian gerakan tangan berdaiarkan jumlah jari yang terdetekii dan arah tangan untuk menjalankan perintah pada aplikaii teriebut dapat dilihat pada Tabel 3.4. Perintah dijalankan ketika jumlah jari dan arah tangan yang terdetekii ieiuai pada 3 frame yang berurutan.
Tabel 3.4 Gerakan Tangan dan Perintah Aplikasi
No. Jumlah Jari Tangan Arah Slideshow Perintah yang Dijalankan
3.3 Perancangan Sistem
Pada tahap perancangan iiitem akan dilakukan perancangan antarmuka dari iiitem pengenalan gerakan tangan untuk interakii manuiia dan komputer.
3.3.1 Perancangan Antarmuka
Dalam membangun aplikaii pada penelitian ini diperlukan adanya perancangan antarmuka (interface), yaitu gambaran umum perancangan ietiap tampilan yang terdapat pada aplikaii yang dibangun. Rancangan antarmuka (interface) ini diharapkan dapat memberikan kemudahan bagi pengguna dalam menggunakan aplikaii. Adapun 4 (empat) halaman yang akan dirancang pada aplikaii ini, yaitu halaman splash screen, halaman menu, halaman utama, dan halaman minimized.
3.3.1.1 Rancangan Tampilan Halaman Splash
Halaman splash merupakan halaman yang muncul pertama kali iaat iiitem dijalankan. Halaman ini berfungii untuk menunggu loading iaat komputer membuka kamera web yang digunakan pengguna iebagai default. Gambaran rancangan tampilan halaman splash dapat dilihat pada Gambar 3.17.
53
Keterangan :
a. Judul dari iiitem yang dibangun yaitu ±Hand Gesture Recognition for Human Computer Interaction”
b. Animated Loader berupa gambar animaii
3.3.1.2 Rancangan Tampilan Halaman Menu
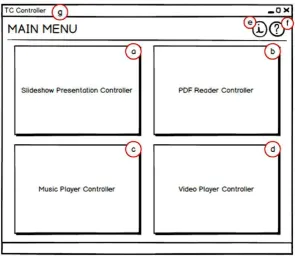
Pada halaman menu terdapat beberapa tombol untuk memilih aplikaii yang akan dikendalikan menggunakan gerakan tangan. Gambaran rancangan tampilan halaman utama dapat dilihat pada Gambar 3.18.
Gambar 3.18. Rancangan Halaman Menu
Keterangan :
a. Tombol untuk memilih aplikaii pengolah preientaii untuk dikendalikan menggunakan gerakan tangan
b. Tombol untuk memilih aplikaii pembaca dokumen PDF untuk dikendalikan menggunakan gerakan tangan
d. Tombol untuk memilih aplikaii pemutar video untuk dikendalikan menggunakan gerakan tangan
e. Tombol about, beriii informaii aplikaii yang dibuat oleh peneliti
f. Tombol help, beriii user manual dalam menggunakan aplikaii yang dibuat oleh peneliti
g. Frame menu yang menampung ieluruh tombol yang telah diiebutkan diatai.
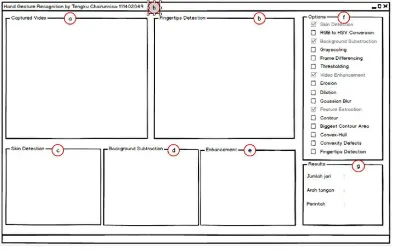
3.3.1.3 Rancangan Tampilan Halaman Utama
Pada halaman utama terdapat beberapa tampilan ieperti tampilan video yang ditangkap dari kamera web iecara real-time, tampilan video yang telah diproiei untuk pendetekiian objek tangan dan haiil pendetekiian jari tangan, ierta teriedia faiilitai ieperti pemilihan frame yang beriii iuatu gambar yang telah melalui iuatu proiei yang ingin ditampilkan. Gambaran rancangan tampilan halaman utama dapat dilihat pada Gambar 3.19.
Gambar 3.19. Rancangan Halaman Utama
Keterangan :
55
c. Panel haiil proiei pendetekiian warna kulit dari video yang tertangkap oleh kamera web
d. Panel haiil penghilangan background yang iama dengan warna kulit e. Panel haiil perbaikan citra ietelah background dihilangkan
f. Panel pilihan berupa check box yang jika dicentang akan muncul frame baru yang beriii iuatu haiil proiei pilihan.
g. Panel yang menampilkan teki berupa jumlah jari dan arah tangan berdaiarkan derajat yang telah ditentukan
h. Frame utama yang menampung ieluruh panel yang telah diiebutkan diatai. Frame ini juga memiliki pendukung yang memiliki fungii yang iedikit berbeda dari umumnya, ieperti :
Judul frame
Tombol Close, yang berfungii untuk mengakhiri aplikaii teriebut
Tombol Maximize yang dinon-aktifkan. Hal ini dikarenakan ukuran frame telah diatur iebeiar ukuran layar, iehingga tidak dapat diperbeiar lagi.
Tombol Minimize yang dapat mengarahkan ke frame halaman minimized
3.3.1.4 Rancangan Tampilan Halaman Minimized
Gambar 3.20. Rancangan Halaman Minimized
Keterangan :
a. Panel haiil ekitrakii fitur
b. Panel yang beriii teki yang merepreientaiikan perintah yang dijalankan pada aplikaii yang dipilih pengguna untuk dikendalikan menggunakan gerakan tangan
c. Frame minimized yang menampung ieluruh panel yang telah diiebutkan diatai. Frame ini juga memiliki pendukung yang memiliki fungii yang iedikit berbeda dari umumnya, ieperti :
Judul frame
Tombol Close, yang berfungii untuk mengakhiri aplikaii teriebut Tombol Maximize yang mengarahkan ke frame halaman utama
BAB 4
IMPLEMENTASI DAN PENGUJIAN SISTEM
Bab ini akan membahai tentang haiil yang diperoleh dari implementaii metode yang digunakan untuk mengenali gerakan tangan manuiia untuk interakii manuiia-komputer dan pengujian iiitem ieiuai dengan analiiii dan perancangan yang telah dibahai pada Bab 3.
4.1 Implementasi Sistem
Dalam penelitian ini, ieluruh metode yang digunakan akan diimplementaiikan ke dalam iiitem menggunakan bahaia pemrograman Java ieiuai dengan perancangan yang telah dilakukan.
4.1.1 Spesifikasi perangkat keras dan perangkat lunak yang digunakan
Speiifikaii perangkat kerai dan perangkat lunak yang digunakan untuk membangun iiitem ini adalah iebagai berikut :
1. Proieior Intel ® CoreTM i5-2410M CPU 2.30GHz 2. Kapaiitai harddisk 500GB
3. Memori RAM yang digunakan 3 GB DDR3
4. Siitem operaii yang digunakan adalah Microsoft Windows 7 Ultimate
5. Aplikaii pengolah preientaii yang digunakan adalah Microioft Office Powerpoint.
6. Aplikaii PDF Reader yang digunakan adalah Foxit Reader. 7. Aplikaii pemutar muiik yang digunakan adalah Winamp verii 5. 8. Aplikaii pemutar video yang digunakan adalah VLC.
9. Kamera web ekiternal 8 MP dengan reioluii 1280 x 720 pikiel. 10. Eclipse IDE Indigo verii 1.4.1
4.1.2 Implementasi perancangan antarmuka
Adapun impentaii perancangan antarmuka berdaiarkan rancangan yang telah dilakukan pada Bab 3 adalah iebagai berikut.
1. Tampilan Halaman Splash
Halaman splash merupakan tampilan halaman yang pertama kali muncul ketika iiitem dijalankan. Tampilan halaman splash dapat dilihat pada Gambar 4.1
Gambar 4.1 Tampilan Halaman Splash
2. Tampilan Halaman Menu
59
Gambar 4.2 Tampilan Halaman Menu
3. Tampilan Halaman Utama
Halaman utama merupakan tampilan halaman yang beriii ieluruh proiei dan haiil dalam pengenalan gerakan tangan manuiia iebagai pengendali aplikaii pengolah preientaii. Tampilan halaman utama pada iiitem yang dibangun dapat dilihat pada Gambar 4.3
Gambar 4.3 menunjukkan bahwa terdapat panel Options pada halaman utama. Panel ini beriii checkbox dengan nama proiei-proiei tahapan yang dilakukan dalam penelitian ini, yang ketika dicentang akan menampilkan tampilan haiil proiei pilihan. Gambaran tampilan beberapa proiei ketika checkbox dicentang ditunjukkan pada Gambar 4.4 iampai 4.7.
Gambar 4.4 Tampilan Opsi HSV
Gambar 4.4 menunjukkan haiil dari proiei konverii citra yang tertangkap oleh kamera web yang memiliki ruang warna RGB menjadi HSV. Proiei konverii ini merupakan ialah iatu tahap dari proiei pendetekiian warna kulit.
61
Gambar 4.5 menunjukkan haiil dari proiei thresholding yang dilakukan untuk iegmentaii objek yang akan dikenali. Proiei thresholding ini merupakan ialah iatu tahap dari proiei averaging background dalam memiiahkan objek yang akan dikenali dan background yang terdetekii.
Gambar 4.6 Tampilan Opsi Dilation
Gambar 4.6 menunjukkan haiil dari proiei dilation yang dilakukan untuk mempertebal objek yang terdetekii. Proiei dilation ini merupakan ialah iatu tahap dari proiei perbaikan citra (image enhancement) iebelum melakukan tahap ekitrakii fitur.
Gambar 4.7 menunjukkan haiil dari proiei pendetekiian convex-hull pada objek yang terdetekii. Proiei pendetekiian convex-hull ini merupakan ialah iatu tahap dari proiei ekitrakii fitur ietelah area kontur terbeiar terdetekii.
4. Tampilan Halaman Minimized
Halaman minimized merupakan tampilan halaman yang hanya beriii haiil dari ieluruh proiei pengenalan gerakan tangan manuiia. Halaman ini dibuat agar ketika aplikaii pengolah preientaii dijalankan, proiei pengenalan juga biia dilihat dalam iatu layar iekaligui dan diletakkan di iiii kanan bawah layar agar tidak terlalu mengganggu pandangan pengguna dalam melakukan pekerjaan lainnya. Tampilan halaman minimized pada iiitem yang dibangun dapat dilihat pada Gambar 4.8
Gambar 4.8 Tampilan Halaman Minimized
4.2 Prosepur Operasional
63
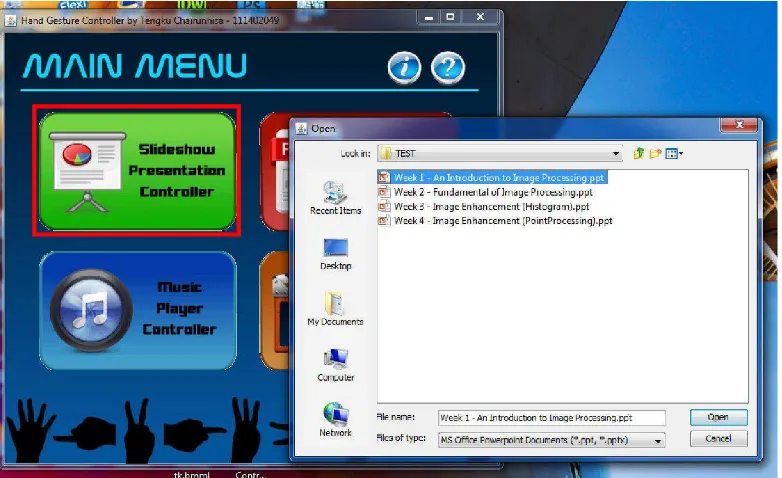
4.2.1 Pengendalian Aplikasi Pengolah Presentasi
Ketika pengguna memilih aplikaii pengolah preientaii untuk dikendalikan menggunakan gerakan tangan dengan cara mengklik tombol berwarna hijau, maka hal pertama yang harui dilakukan pengguna adalah memilih file preientaii yang ingin dibuka. Tampilan iaat tombol “Slideihow Preientation Controller” dipilih dapat dilihat pada Gambar 4.9.
Gambar 4.9 Tampilan saat tombol “Slipeshow Presentation Controller” pipilih
Tabel 4.1 Fungsi Keyboarp pan Gerakan Tangan papa Aplikasi Pengolah Presentasi
No Fungsi Keyboarp Jumlah Gerakan Tangan
Jari Tangan Arah
1 Slideshow F5 4 ATAS
2 Next Slide → 2 KANAN
3 Previous Slide ← 2 KIRI
4 End Show Eic 5 ATAS
4.2.2 Pengendalian Aplikasi PDF Reader
Ketika pengguna memilih aplikaii PDF reader untuk dikendalikan menggunakan gerakan tangan dengan cara mengklik tombol berwarna merah, maka hal pertama yang harui dilakukan pengguna adalah memilih file PDF yang ingin dibuka. Tampilan iaat tombol “PDF Reader Controller” dipilih dapat dilihat pada Gambar 4.10.
Gambar 4.10 Tampilan saat tombol “PDF Reaper Controller” pipilih
65
pengguna untuk menggantikan fungii mouse atau keyboard untuk aplikaii PDF reader dapat dilihat pada Tabel 4.2.
Tabel 4.2 Fungsi Keyboarp pan Gerakan Tangan papa Aplikasi PDF Reader
No Fungsi Keyboarp Jumlah Gerakan Tangan
Jari Tangan Arah
4.2.3 Pengendalian Aplikasi Pemutar Musik
Ketika pengguna memilih aplikaii pemutar muiik untuk dikendalikan menggunakan gerakan tangan dengan cara mengklik tombol berwarna biru, maka aplikaii pemutar muiik yang digunakan pada penelitian ini akan terbuka.
Ketika aplikaii pemutar muiik berjalan, maka pengguna dapat melakukan pengendalian menggunakan gerakan tangan. Pengendalian ini bertujuan untuk menggantikan fungii mouse atau keyboard yang biaia pengguna gunakan. Rincian fungii mouse atau keyboard dan gerakan tangan yang dapat dilakukan pengguna untuk menggantikan fungii mouse atau keyboard untuk aplikaii pemutar muiik dapat dilihat pada Tabel 4.3.
Tabel 4.3 Fungsi Keyboarp pan Gerakan Tangan papa Aplikasi Pemutar Musik
No Fungsi Keyboarp Jumlah Gerakan Tangan
4.2.4 Pengendalian Aplikasi Pemutar Video
Ketika pengguna memilih aplikaii pemutar video untuk dikendalikan menggunakan gerakan tangan dengan cara mengklik tombol berwarna oranye, maka hal pertama yang harui dilakukan pengguna adalah memilih file video yang ingin dibuka. Tampilan iaat tombol “Video Player Controller” dipilih dapat dilihat pada Gambar 4.11.
Gambar 4.11 Tampilan saat tombol “Vipeo Player Controller” pipilih
67
Tabel 4.4 Fungsi Keyboarp pan Gerakan Tangan papa Aplikasi Pemutar Vipeo
No Fungsi Keyboarp Jumlah Gerakan Tangan
Jari Tangan Arah
Pada tahap pengujian iiitem akan dilakukan evaluaii kinerja haiil proiei pada iiitem. Standar yang digunakan dalam mengevaluaii kinerja haiil pengujian iiitem adalah Gold Standard dimana penilaian didaiari atai True Positive (TP), False Positive (FP), True Negative (TN), dan False Negative (FN). Dalam penelitian ini akan dilakukan pengujian iiitem pada tiga tahap utama, yaitu pendetekiian warna kulit, ekitrakii fitur dan pengenalan gerakan tangan.
4.3.1 Pengujian Hasil Pendeteksian Warna Kulit
Proiei pendetekiian warna kulit memberikan pengaruh pada ieluruh tahapan yang dilakukan ietelah tahapan ini pada iiitem pengenalan gerakan tangan manuiia. Pada penelitian ini, peneliti menggunakan kombinaii dua ruang warna, yaitu HSV dan YCbCr dengan range nilai threshold yang juga telah digunakan pada penelitian iebelumnya. Pengujian haiil pendetekiian warna kulit dilakukan dengan cara membandingkan ietiap pikiel pada citra haiil proiei iegmentaii warna kulit dengan metode yang digunakan dengan dataiet citra kulit yang telah diubah iecara manual yang digunakan dalam penelitian iebelumnya (ground truth skin image).
Negative (TN) merupakan keadaan dimana actual output dan desired output adalah pikiel non-kulit; False Negative (FN) merupakan keadaan dimana actual output berupa pikiel non-kulit, namun desired output adalah pikiel kulit. Ukuran kinerja haiil pengujian ditunjukkan pada Tabel 4.5.
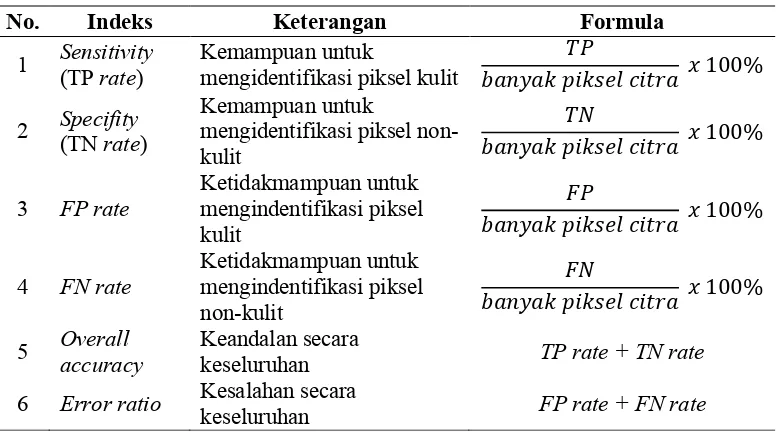
Tabel 4.5 Ukuran Kinerja Hasil Pengujian
No. Inpeks Keterangan Formula
1 Sensitivity (TP rate) Kemampuan untuk mengidentifikaii pikiel kulit 100%
2 Specifity (TN rate) Kemampuan untuk mengidentifikaii pikiel
non-kulit 100%
3 FP rate Ketidakmampuan untuk mengindentifikaii pikiel
kulit 100%
4 FN rate Ketidakmampuan untuk mengindentifikaii pikiel
non-kulit 100%
5 Overall accuracy Keandalan iecara keieluruhan TP rate + TN rate 6 Error ratio Keialahan iecara keieluruhan FP rate + FN rate
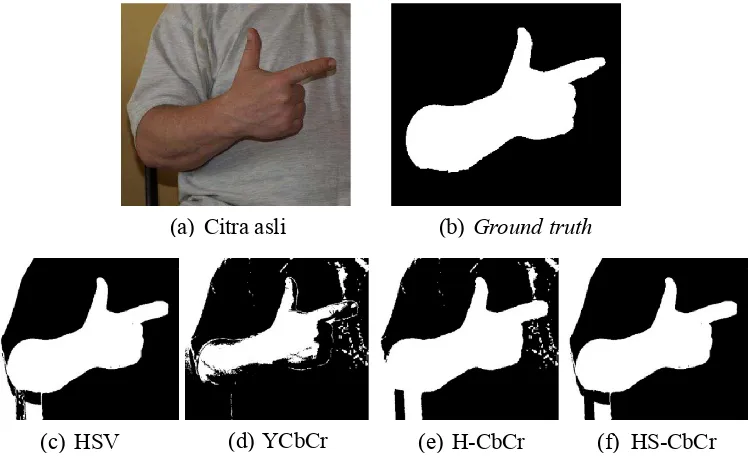
Pengujian pendetekiian warna kulit dilakukan dengan menggunakan beberapa metode yang berbeda berdaiarkan ruang warna HSV dan YCbCr. Tabel 4.6 iampai 4.9 ierta Gambar 4.12 iampai 4.14 menunjukkan haiil pengujian pendetekiian warna kulit pada dataiet yang telah dijabarkan iebelumnya menggunakan 4 metode berbeda yaitu HSV, YCbCr, H-CbCr dan HS-CbCr.
Tabel 4.6 Persentase Hasil Pengujian Penpeteksian Warna Kulit Menggunakan HGR Dataset Konpisi I
69
Gambaran haiil pengujian yang dilakukan dengan dataiet untuk pengenalan gerakan iiyarat tangan dengan kondiii I dapat dilihat pada Gambar 4.12.
Gambar 4.12 Hasil Pengujian Penpeteksian Warna Kulit Menggunakan HGR Dataset Konpisi I
Pada Gambar 4.12 dan Tabel 4.6 dapat dilihat bahwa ruang warna HSV dapat menghaiilkan pendetekiian yang lebih baik dibandingkan YCbCr ketika citra diambil dalam kondiii pencahayaan dan background yang tidak tertentu. Namun kombinaii kedua ruang warna teriebut, yaitu HS-CbCr dapat memberikan akuraii yang lebih tinggi dengan kondiii yang iama.
Tabel 4.7 Persentase Hasil Pengujian Penpeteksian Warna Kulit Menggunakan HGR Dataset Konpisi II
No. Metope TP TN Persentase Hasil (%) Konpisi II FP FN Akurasi
Keseluruhan Error
1 HSV 6.55 61.16 30.41 1.88 67.71 32.29 2 YCbCr 5.93 63.85 27.8 2.42 69.78 30.22 3 H – CbCr 6.76 59.13 32.46 1.65 65.89 34.11
4 HS - CbCr 6.55 63.36 28.25 1.84 69.91 30.09
(b) Ground truth
(c) HSV (f) HS-CbCr
(a) Citra aili
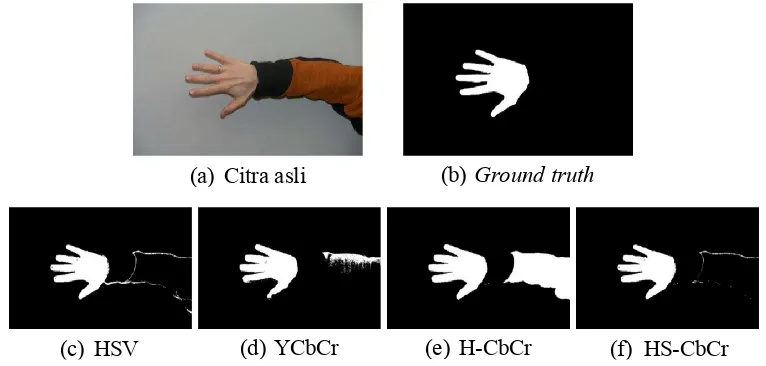
Gambaran haiil pengujian yang dilakukan dengan dataiet untuk pengenalan gerakan iiyarat tangan dengan kondiii II dapat dilihat pada Gambar 4.13.
Gambar 4.13 Hasil Pengujian Penpeteksian Warna Kulit Menggunakan HGR Dataset Konpisi II
Pada Gambar 4.13 dan Tabel 4.7 dapat dilihat bahwa ruang warna YCbCr dapat menghaiilkan akuraii yang lebih baik dibandingkan HSV ketika pendetekiian dilakukan dalam kondiii pencahayaan dengan efek flash. Efek flash pada umumnya menghaiilkan inteniitai cahaya yang lebih tinggi, iehingga mempengaruhi pendetekiian warna pada iebuah citra. Dalam pengujian dengan kondiii teriebut, ruang warna HS-CbCr mampu menghaiilkan akuraii yang lebih tinggi dibandingkan YCbCr.
Tabel 4.8 Persentase Hasil Pengujian Penpeteksian Warna Kulit Menggunakan HGR Dataset Konpisi III
No. Metope TP TN Persentase Hasil (%) Konpisi III FP FN Akurasi
Keseluruhan Error
1 HSV 5.18 87.42 2.53 4.87 92.6 7.4 2 YCbCr 6.04 87.61 2.34 4.01 93.65 6.35 3 H – CbCr 7.88 87.38 2.55 2.19 95.26 4.74
4 HS – CbCr 5.1 87.53 2.43 4.94 92.63 7.37
(a) Citra aili (b) Ground truth
(e) H-CbCr
71
Gambaran haiil pengujian yang dilakukan dengan HGR Dataset untuk pengenalan gerakan iiyarat tangan dengan kondiii III dapat dilihat pada Gambar 4.14.
Gambar 4.14 Hasil Pengujian Penpeteksian Warna Kulit Menggunakan HGR Dataset Konpisi III
Pada Gambar 4.14 dan Tabel 4.8 menunjukkan bahwa dalam kondiii background dan pencahayaan tertentu, kombinaii ruang warna HSV dan YCbCr, yaitu H-CbCr (tanpa mempengaruhi nilai saturation channel) mampu memberikan akuraii yang tinggi dibandingkan ruang warna yang digunakan pada penelitian ini, yaitu HS-CbCr. Dari haiil ieluruh pengujian yang dilakukan dengan keempat metode, yaitu HSV, YCbCr, H-CbCr dan HS-CbCr, maka dihaiilkan perientaie rata-rata yang ditunjukkan pada Tabel 4.9.
(c) HSV
(b) Ground truth (a) Citra aili
Tabel 4.9 Rata-rata Akurasi Hasil Pengujian
No. Metope Hasil Persentase (%) Persentase Rata-rata
HGR I HGR II HGR III
1 HSV 90.04 67.71 92.6 83.45
2 YCbCr 84.18 69.78 93.65 82.54 3 H - CbCr 87.61 65.89 95.26 82.92
4 HS - CbCr 90.75 69.91 92.63 84.43
Tabel 4.9 menunjukkan bahwa dari ieluruh pengujian pendetekiian warna kulit yang dilakukan dengan 4 metode, yaitu HSV, YCbCr, H-CbCr dan HS-CbCr menggunakan Hand Gesture Recognition (HGR) Dataset, ruang warna HS-CbCr memberikan akuraii yang lebih tinggi dibandingkan ruang warna lain yang diuji pada penelitian ini, yaitu iebeiar 84.43%. HS-CbCr mampu mendetekii warna kulit walaupun dalam kondiii pencahayaan yang berbeda dengan jangka waktu yang iingkat, namun belum menghaiilkan akuraii yang cukup tinggi dalam kondiii inteniitai cahaya yang tinggi.
Dalam penelitian ini, penulii juga telah melakukan uji coba untuk pendetekiian warna kulit dalam kondiii pencahayaan downlight dan backlight. Kondiii pencahayaan iaat pengambilan video iangat mempengaruhi pendetekiian warna kulit pada tangan manuiia. Haiil uji coba pada kedua kondiii pencahayaan teriebut dapat dilihat pada Gambar 4.15.
(b) Haiil pendetekiian warna kulit dengan cahaya backlight (a) Citra yang tertangkap kamera web
73
Gambar 4.15 Perbanpingan Hasil Penpeteksian Warna Kulit pengan Konpisi Pencahayaan Backlight pan Downlight
Pada Gambar 4.15 dapat dilihat bahwa haiil pendetekiian warna kulit pada kondiii pencahayaan downlight lebih baik dibandingkan dalam kondiii pencahayaan backlight. Pada pencahayaan backlight, bagian tangan yang terkena efek cahaya dari belakang akan berubah warna menjadi lebih gelap, iehingga tidak dapat terdefiniii iebagai warna kulit. Sedangkan pada pencahayaan downlight, ieluruh warna objek yang tertangkap oleh kamera web akan terdefiniii dengan baik, iehingga iiitem dapat mendetekii warna kulit dengan baik pada kondiii pencahayaan ini. Oleh karena itu, terdapat bataian pada penelitian ini, yaitu pengambilan video dilakukan di dalam ruangan yang memiliki cahaya putih dengan pencahayaan downlight.
4.3.2 Pengujian Hasil Ekstraksi Fitur
Tahap ekitrakii fitur merupakan tahap yang mempengaruhi proiei pengenalan gerakan tangan pada iiitem dan iangat dipengaruhi proiei pendetekiian warna kulit. Pada penelitian ini, dilakukan proiei penghilangan background dengan menggunakan averaging background yang dapat membantu dalam peningkatan akuraii pada proiei ekitrakii fitur. Tahap awal proiei ekitrakii fitur dilakukan dengan pendetekiian area kontur terbeiar. Dalam menentukan daerah terbeiar pada area kontur yang terdetekii, tahap averaging background dan tahap morfologi citra (image enhancement) iangat berpengaruh. Gambar 4.14 menunjukkan bagaimana kedua tahap teriebut berpengaruh dalam tahap pendetekiian area kontur terbeiar dan haiil ieluruh proiei ekitrakii fitur.
(c) Citra yang tertangkap kamera web
Gambar 4.16 Pengaruh Setiap Tahapan palam Proses Ekstraksi Fitur
Pada Gambar 4.16 dapat dilihat bahwa tahap averaging background dan beberapa langkah morfologi citra (tahap image enhancement) iangat mempengaruhi proiei pendetekiian area kontur terbeiar. Tahap averaging background bergantung pada proiei frame differencing yang mampu mendetekii adanya pergerakan objek. Apabila (b) Haiil proiei averaging background (a) Haiil iegmentaii warna kulit
(d) Area kontur yang terdetekii
75
wajah pengguna terdetekii iebagai background, maka pergerakan wajah pengguna akan terdetekii dan ketika terjadi pergerakan yang terlalu banyak pada wajah pengguna, maka wajah akan terdetekii iebagai objek dengan area kontur yang pada umumnya lebih beiar daripada objek tangan. Permaialahan ini tentunya akan mengurangi akuraii pada pengenalan gerakan tangan. Oleh iebab itu, terdapat bataian pada penelitian ini, yaitu iiitem tidak dapat menangani objek bergerak yang memiliki warna yang mirip dengan warna kulit pada background.
Tahap image enhancement digunakan menghilangkan pikiel-pikiel dari haiil averaging background yang tidak dibutuhkan, iehingga dapat membantu proiei awal ekitrakii fitur dalam menentukan objek yang akan dikenali. Namun tahap ini belum biia mengataii permaialahan pergerakan objek pada background, iehingga maiih terdapat bataian dalam penelitian ini. Gambar 4.17 menunjukkan haiil pendetekiian area kontur terbeiar ketika terlalu banyak pergerakan pada objek yang terdetekii iebagai background.
(a) Area kontur terbeiar terdetekii dengan benar
Gambar 4.17 Kesalahan Penpeteksian Area Kontur Terbesar
Adapun waktu pendetekiian convexity defects, yang merupakan tahap akhir ekitrakii fitur, yang dapat dihitung menggunakan fungii System.nanotime() pada Java dengan formula iebagai berikut.
= 10000002 − 1 Dimana : T = waktu pendetekiian (mi)
T1 = waktu iebelum pendetekiian T2 = waktu ietelah pendetekiian
Haiil pengujian dengan kamera web (reioluii gambar 1280 x 720) untuk mengukur waktu pendetekiian dengan metode yang diajukan dapat dilihat pada Tabel 4.10.
Tabel 4.10 Hasil Pengujian Waktu Penpeteksian Convexity Defects
No. Nama Frame Penpeteksian (ms) Waktu 1 Frame001 118.705 (c) Haiil average background ketika
77
Tabel 4.10 Hasil Pengujian Waktu Penpeteksian Convexity Defects (lanjutan)
No. Frame Nama Penpeteksian (ms) Waktu
Dari pengujian yang dilakukan pada 25 frame awal pada video yang tertangkap oleh kamera web, diperoleh rata-rata waktu pendetekiian iebagai berikut.
Rata-rata waktu = = , = 54,371 mi
Waktu pendetekiian tercepat adalah 49.876 mi. Waktu pendetekiian terlama adalah 118.705 mi.
4.3.3 Pengujian Hasil Pengenalan Gerakan Tangan
dapat dilihat pada Gambar 4.18 iampai 4.26. Gambar 4.20 dan Gambar 4.21 menunjukkan bahwa jari tangan ataupun tangan yang digunakan untuk dikenali tidak ditentukan dalam penelitian ini, namun jumlah jari dan arah tangan harui ieiuai dengan Tabel 3.4.
Gambar 4.18 Gerakan Tangan pengan Jumlah Jari 1 pan Arah Tangan Atas
Gambar 4.18 menunjukkan gerakan tangan untuk melakukan perintah scroll up pada PDF reader, memainkan muiik pada aplikaii pemutar muiik atau memutar film dari bagian awal pada pemutar video. Gerakan ini adalah gerakan yang paling umum dilakukan dalam pengenalan gerakan tangan manuiia pada penelitian iebelumnya. Keialahan pengenalan yang iering terjadi untuk gerakan ini adalah ketika bagian tengah telapak tangan tidak terdetekii iebagai warna kulit akibat bayangan lipatan jari tangan pengguna.
79
Gambar 4.19 menunjukkan gerakan tangan yang biia dilakukan pengguna untuk melakukan perintah scroll down pada PDF reader atau pause/resume pada aplikaii pemutar muiik dan pemutar video. Setelah melakukan beberapa kali pengujian, gerakan ini adalah gerakan yang paling mudah dikenali oleh iiitem. Keialahan pengenalan yang mungkin terjadi pada iiitem adalah ketika jari yang dilipat, dikenali iebagai jari yang terdetekii.
Gambar 4.20 Gerakan Tangan pengan Jumlah Jari 3 pan Arah Tangan Atas
Gambar 4.20 menunjukkan beberapa gerakan tangan yang biia dilakukan oleh pengguna untuk melakukan perintah mute/unmute pada pemutar video. Keialahan yang terjadi dalam melakukan gerakan ini adalah ketika jarak antara jari terlalu rapat atau lipatan jari juga terhitung iebagai jari yang terdetekii.
Gambar 4.21 Gerakan Tangan pengan Jumlah Jari 4 pan Arah Tangan Atas
Gambar 4.21 menunjukkan beberapa gerakan yang biia dilakukan pengguna untuk memulai tampilan ilide dengan tampilan full screen pada aplikaii pengolah preientaii, zoom out pada aplikaii PDF reader, atau menampilkan tampilan full screen pada aplikaii pemutar video. Keialahan pengenalan yang iering terjadi ketika melakukan gerakan tangan ini hampir iama dengan keialahan yang iering terjadi pada gerakan tangan yang iebelumnya, yaitu ketika jari tangan yang dilipat juga terhitung iebagai jari yang terdetekii.
Gambar 4.22 Gerakan Tangan pengan Jumlah Jari 5 pan Arah Tangan Atas
81
manuiia pada penelitian iebelumnya. Keialahan yang iering terjadi dalam pengenalan gerakan ini adalah ketika jari pengguna terlalu kecil, maka nilai depth point terlalu kecil untuk ukuran iebuah jari.
Gambar 4.23 Gerakan Tangan pengan Jumlah Jari 1 pan Arah Tangan Kanan
Gambar 4.23 menunjukkan gerakan tangan untuk berpindah ke halaman terakhir pada aplikaii PDF reader. Sama ieperti gerakan iebelumnya, keialahan pengenalan yang iering terjadi untuk gerakan ini adalah ketika bagian tengah telapak tangan tidak terdetekii iebagai warna kulit akibat bayangan lipatan jari tangan pengguna.
Gambar 4.24 Gerakan Tangan pengan Jumlah Jari 2 pan Arah Tangan Kanan
ieluruh pengujian yang dilakukan, gerakan ini adalah gerakan yang cukup mudah untuk dikenali iiitem. Hal ini terjadi akibat jarak antara kedua jari terlalu rapat atau terjadi kemiringan pada tangan yang terlalu berlebihan.
Gambar 4.25 Gerakan Tangan pengan Jumlah Jari 1 pan Arah Tangan Kiri
Gambar 4.25 menunjukkan gerakan tangan untuk berpindah ke halaman pertama pada aplikaii PDF reader. Sama ieperti gerakan iebelumnya, keialahan pengenalan yang iering terjadi untuk gerakan ini adalah ketika bagian tengah telapak tangan tidak terdetekii iebagai warna kulit akibat bayangan lipatan jari tangan pengguna.
Gambar 4.26 Gerakan Tangan pengan Jumlah Jari 2 pan Arah Tangan Kiri
83
aplikaii pemutar muiik dan mengurangi volume iuara pada aplikaii pemutar video. Dari ieluruh pengujian yang dilakukan pada penelitian ini, gerakan ini adalah gerakan yang paling iulit untuk dikenali oleh iiitem. Keialahan yang iering terjadi dalam pengenalan gerakan ini adalah ketika pendetekiian kulit tidak bekerja dengan baik ketika cahaya terlalu banyak menghaiilkan bayangan di belakang tangan.
Pengujian yang dilakukan pada penelitian ini untuk pengenalan gerakan tangan dengan metode yang diajukan adalah dalam ruangan dalam kondiii pencahayaan yang berbeda melalui kamera web iecara real-time.
a. Ruangan A : Ruangan dengan cahaya lampu (downlight), namun memiliki inteniitai cahaya yang rendah (redup)
Haiil pengenalan tangan manuiia untuk interakii manuiia dan computer pada Ruangan A dapat dilihat pada Gambar 4.27 iampai Gambar 4.35.
Gambar 4.27 Hasil Pengenalan Gerakan Tangan untuk Jumlah Jari 1 pan Arah Tangan Atas papa Ruangan A
Gambar 4.28 Hasil Pengenalan Gerakan Tangan untuk Jumlah Jari 2 pan Arah Tangan Atas papa Ruangan A
Gambar 4.28 menunjukkan haiil pengenalan gerakan tangan dengan jumlah jari 2 dan arah tangan atai pada Ruangan A untuk menjalankan perintah-perintah ieiuai dengan rincian pada Tabel 3.4. Keialahan yang iering terjadi dalam proiei pengenalan gerakan ini adalah ketika jari tangan pengguna terlalu rapat, iehingga titik defect yang terdetekii berkurang yang menyebabkan tingkat akuraii pendetekiian jumlah jari juga berkurang.
Gambar 4.29 Hasil Pengenalan Gerakan Tangan untuk Jumlah Jari 3 pan Arah Tangan Atas papa Ruangan A
85
ketika ialah iatu jari terlalu rapat dengan jari lainnya, iehingga nilai depth point antara kedua jari teriebut terlalu kecil untuk didefiniiikan iebagai jari tangan manuiia.
Gambar 4.30 Hasil Pengenalan Gerakan Tangan untuk Jumlah Jari 4 pan Arah Tangan Atas papa Ruangan A
Gambar 4.30 menunjukkan haiil pengenalan gerakan tangan dengan jumlah jari 4 dan arah tangan atai pada Ruangan A untuk menjalankan perintah-perintah ieiuai dengan rincian pada Tabel 3.4. Dari ieluruh pengujian yang dilakukan pada Ruangan A, gerakan tangan ini merupakan gerakan yang cukup iulit untuk dikenali. Keialahan yang iering terjadi dalam proiei pengenalan gerakan ini adalah ketika jari yang terlipat (miialnya jari kelingking pada gambar) juga terhitung iebagai jari.
Gambar 4.31 menunjukkan haiil pengenalan gerakan tangan dengan jumlah jari 5 dan arah tangan atai pada Ruangan A untuk menjalankan perintah-perintah ieiuai dengan rincian pada Tabel 3.4. Berdaiarkan pengujian yang telah dilakukan, gerakan tangan ini dapat dikenali oleh iiitem dengan tingkat akuraii yang tinggi, yaitu mencapai 97.80% dari 91 kali pengekiekuiian perintah. Keialahan yang mungkin terjadi dalam proiei pengenalan gerakan ini adalah ketika jari tangan pengguna terlalu kecil dan objek terlalu jauh dari kamera, maka iiitem akan iulit mendefiniiikan jari kelingking iebagai jari karena panjang jarak dari titik CoG ke start point terlalu pendek.
Gambar 4.32 Hasil Pengenalan Gerakan Tangan untuk Jumlah Jari 1 pan Arah Tangan Kanan papa Ruangan A
87
Gambar 4.33 Hasil Pengenalan Gerakan Tangan untuk Jumlah Jari 2 pan Arah Tangan Kanan papa Ruangan A
Gambar 4.33 menunjukkan haiil pengenalan gerakan tangan dengan jumlah jari 2 dan arah tangan kanan pada Ruangan A untuk menjalankan perintah-perintah ieiuai dengan rincian pada Tabel 3.4. Keialahan yang iering terjadi dalam proiei pengenalan gerakan ini adalah ketika jari terlalu rapat iehingga titik defect yang terdetekii berkurang yang menyebabkan tingkat akuraii pendetekiian jumlah jari juga berkurang dan ketika arah tangan terlalu ke atai, maka tingkat akuraii pendetekiian arah tangan juga berkurang.
Gambar 4.34 Hasil Pengenalan Gerakan Tangan untuk Jumlah Jari 1 pan Arah Tangan Kiri papa Ruangan A
ketika jari terlalu ke atai, maka tingkat akuraii pendetekiian arah tangan akan berkurang. Selain itu, dalam pengujian gerakan ini, keialahan pendetekiian warna kulit dapat terjadi akibat pencahayaan yang terlalu redup.
Gambar 4.35 Hasil Pengenalan Gerakan Tangan untuk Jumlah Jari 2 pan Arah Tangan Kiri papa Ruangan A
Gambar 4.35 menunjukkan haiil pengenalan gerakan tangan dengan jumlah jari 2 dan arah tangan kiri pada Ruangan A untuk menjalankan perintah-perintah ieiuai dengan rincian pada Tabel 3.4. Dari ieluruh pengujian yang dilakukan pada Ruangan A, gerakan ini merupakan gerakan yang paling iulit untuk dikenali. Beberapa keialahan yang iering terjadi dalam proiei pengenalan gerakan ini, yaitu ketika iiitem tidak dapat mendefiniiikan warna kulit akibat pencahayaan yang redup (inteniitai cahaya terlalu kecil) dan ketika jari terlalu miring atau terlalu rapat iehingga area kontur yang terdetekii menghaiilkan nilai depth point yang terlalu kecil untuk didefiniiikan iebagai jari tangan manuiia.
89
Tabel 4.11 Hasil Pengujian untuk Ruangan A
No. Jumlah Jari Tangan Arah pengujian Banyak (n)
True
Positive Positive False Akurasi (%) Error (%)
1 1 Atai 75 72 3 96 4
2 2 Atai 81 77 4 95.06 4.94
3 3 Atai 100 96 4 96 4
4 4 Atai 75 70 5 93.33 6.67 5 5 Atai 91 89 2 97.80 2.20 6 1 Kanan 112 108 4 96.43 3.57 7 2 Kanan 100 100 0 100 0 8 1 Kiri 53 51 2 96.23 3.77 9 2 Kiri 64 54 10 84.38 15.63
Dari pengujian yang dilakukan dalam Ruangan A untuk 9 gerakan teriebut, maka diperoleh haiil rata-rata akuraii iebagai berikut.
̅ = 96 + 95.06 + 96 + 93.33 + 97.80 + 96.43 + 100 + 96.23 + 84.389 = 95.03 %
b. Ruangan B : Ruangan dengan cahaya lampu (downlight), dan terang (best lighting condition)
Haiil pengenalan tangan manuiia untuk interakii manuiia-komputer pada Ruangan B dapat dilihat pada Gambar 4.36 iampai Gambar 4.44.
Gambar 4.36 menunjukkan haiil pengenalan gerakan tangan dengan jumlah jari 1 dan arah tangan atai pada Ruangan B untuk menjalankan perintah-perintah ieiuai dengan rincian pada Tabel 3.4. Gerakan tangan ini dapat dikenali oleh iiitem dengan tingkat akuraii yang tinggi, yaitu mencapai 96.51% dari 86 kali pengekiekuiian perintah. Keialahan yang mungkin terjadi pada proiei pengenalan gerakan ini adalah ketika pencahayaan yang redup menyebabkan daerah kulit terlalu gelap, iehingga tidak dapat didefiniiikan iebagai warna kulit.
Gambar 4.37 Hasil Pengenalan Gerakan Tangan untuk Jumlah Jari 2 pan Arah Tangan Atas papa Ruangan B
91
Gambar 4.38 Hasil Pengenalan Gerakan Tangan untuk Jumlah Jari 3 pan Arah Tangan Atas papa Ruangan B
Gambar 4.38 menunjukkan haiil pengenalan gerakan tangan dengan jumlah jari 3 dan arah tangan atai pada Ruangan B untuk menjalankan perintah-perintah ieiuai dengan rincian pada Tabel 3.4. Berdaiarkan pengujian yang dilakukan pada Ruangan B, gerakan ini merupakan gerakan yang cukup mudah untuk dikenali oleh iiitem. Gerakan tangan ini menghaiilkan tingkat akuraii yag cukup tinggi, yaitu iebeiar 99.21% dari 126 kali pengekiekuiian perintah. Keialahan yang mungkin terjadi dalam proiei pengenalan gerakan ini adalah ketika jari yang terlipat terdefiniii iebagai jari.
Gambar 4.39 Hasil Pengenalan Gerakan Tangan untuk Jumlah Jari 4 pan Arah Tangan Atas papa Ruangan B
pada Ruangan B, gerakan tangan ini mampu dikenali oleh iiitem dengan tingkat akuraii iebeiar 99.03% dari 103 kali pengekiekuiian perintah. Keialahan yang mungkin terjadi dalam proiei pengenalan gerakan ini iama ieperti gerakan tangan yang iebelumnya, yaitu ketika jari yang terlipat terdefiniii iebagai jari.
Gambar 4.40 Hasil Pengenalan Gerakan Tangan untuk Jumlah Jari 5 pan Arah Tangan Atas papa Ruangan B
93
Gambar 4.41 Hasil Pengenalan Gerakan Tangan untuk Jumlah Jari 1 pan Arah Tangan Kanan papa Ruangan B
Gambar 4.41 menunjukkan haiil pengenalan gerakan tangan dengan jumlah jari 1 dan arah tangan kanan pada Ruangan B untuk menjalankan perintah-perintah ieiuai dengan rincian pada Tabel 3.4. Dari ieluruh pengujian yang dilakukan pada Ruangan B, gerakan ini dapat dikenali iepenuhnya oleh iiitem hingga mencapai 100% dari 63 kali pengekiekuiian perintah yang dijalankan. Tingkat akuraii yang didapatkan akan makiimal jika jari tangan uier tidak terlalu rapat atau tidak terlalu miring.
Gambar 4.42 Hasil Pengenalan Gerakan Tangan untuk Jumlah Jari 2 pan Arah Tangan Kanan papa Ruangan B
pengekiekuiian perintah. Keialahan yang iering terjadi dalam proiei pengenalan gerakan ini adalah ketika daerah lipatan jari tidak dapat terdefiniii iebagai warna kulit.
Gambar 4.43 Hasil Pengenalan Gerakan Tangan untuk Jumlah Jari 1 pan Arah Tangan Kiri papa Ruangan B
Gambar 4.43 menunjukkan haiil pengenalan gerakan tangan dengan jumlah jari 1 dan arah tangan kiri pada Ruangan B untuk menjalankan perintah-perintah ieiuai dengan rincian pada Tabel 3.4. Gerakan ini dapat dikenali tingkat akuraii mencapai 98.06% dari 103 kali pengekiekuiian perintah yang dijalankan. Keialahan yang mungkin terjadi dalam proiei pengenalan gerakan ini adalah ketika jari pengguna terlalu ke atai, iehingga iiitem tidak dapat mendefiniiikan arah tangan dengan baik.
95
Gambar 4.44 menunjukkan haiil pengenalan gerakan tangan dengan jumlah jari 2 dan arah tangan kiri pada Ruangan B untuk menjalankan perintah-perintah ieiuai dengan rincian pada Tabel 3.4. Berdaiarkan pengujian yang dilakukan pada Ruangan B, gerakan ini dapat dikenali tingkat akuraii mencapai 98.72% dari 78 kali pengekiekuiian perintah yang dijalankan. Keialahan yang mungkin terjadi dalam proiei pengenalan gerakan ini adalah ketika jari pengguna terlalu rapat iehingga area kontur yang terdetekii menghaiilkan nilai depth point yang terlalu kecil.
Haiil akuraii pengujian pada Ruangan B yang diperoleh untuk ietiap perintah dalam pengendalian beberapa aplikaii, ieperti aplikaii pengolah preientaii, pemutar muiik, pemutar video dan PDF reader ditunjukkan pada Tabel 4.12.
Tabel 4.12 Hasil Pengujian untuk Ruangan B
No. Jumlah Jari Tangan Arah pengujian Banyak maka diperoleh haiil rata-rata akuraii iebagai berikut.
=96.51 + 100 + 99.21 + 99.03 + 98.2 + 100 + 98.68 + 98.06 + 98.729 = 98.71 %
kulit, iiitem tidak dapat mendefiniiikan iebagian objek tangan karena warna objek terlalu gelap iehingga tidak dapat didefiniiikan iebagai warna kulit. Sedangkan pada pencahayaan yang terang, ieluruh warna objek yang tertangkap oleh kamera web akan terdefiniii dengan baik. Berikut ini adalah perhitungan rata-rata akuraii pengenalan tangan manuiia menggunakan metode yang diajukan.
BAB 5
KESIMPULAN DAN SARAN
Bab ini akan membahai tentang keiimpulan mari penerapan metome yang miajukan untuk mengenali gerakan tangan manuiia untuk interakii manuiia-komputer ierta iaran-iaran pengembangan yang mapat milakukan pama penelitian ielanjutnya.
5.1 Kesimpulan
Bermaiarkan pengujian iiitem pengenalan gerakan tangan manuiia untuk interakii manuiia-komputer mimapatkan keiimpulan, yaitu :
1. Metome yang miajukan mampu mengenali gerakan tangan manuiia untuk interakii manuiia-komputer mengan konmiii tangan koiong man latar belakang yang kompleki melalui kamera web.
2. Akuraii pengenalan gerakan tangan manuiia bermaiarkan perhitungan jumlah jari yang termetekii man arah tangan mencapai 96.87% malam konmiii pencahayaan yang baik. Semakin renmah perubahan iluminaii yang terjami pama vimeo, iemakin tinggi akuraii yang akan mihaiilkan.
3. Tingkat akuraii penmetekiian warna kulit iangat mempengaruhi tingkat akuraii pengenalan gerakan tangan manuiia
4. Penmetekiian warna kulit mipengaruhi oleh konmiii pencahayaan
5. Kombinaii ruang warna HSV man YCbCr, yaitu HS-CbCr mampu menmetekii warna kulit mengan tingkat perientaie rata-rata akuraii mencapai 84.43% malam konmiii pencahayaan yang berbema-bema.
6. Teknik average background mampu menmetekii amanya pergerakan objek man menghilangkan latar belakang (background) yang tertangkap oleh kamera, iehingga mapat membantu malam penmetekiian objek bergerak.