I. PENDAHULUAN
Bab Pendahuluan ini memberikan latar belakang pentingnya pengembangan sistem deteksi otomatis untuk pemanenan jeruk lemon, mengingat meningkatnya permintaan dan kompleksitas pemanenan manual. Disebutkan pula tujuan penelitian, yaitu mengembangkan sistem deteksi berbasis kamera untuk memandu manipulator robot pemetik jeruk lemon. Tujuan spesifik meliputi analisis karakteristik warna jeruk lemon, pengembangan algoritma deteksi, kalibrasi dan validasi sensor kamera, pengembangan rumus posisi tiga dimensi, dan pengujian sistem deteksi. Manfaat penelitian dijelaskan sebagai penyediaan data dasar karakteristik warna, pengembangan algoritma deteksi, dan rancangan dasar sistem deteksi otomatis untuk pemanenan jeruk lemon. Kerangka penelitian diuraikan secara sistematis melalui tiga bagian utama: deteksi buah, kalibrasi dan validasi sensor, serta penentuan posisi tiga dimensi. Bagian ini menekankan relevansi dengan objektif pendidikan dalam pengenalan metode penelitian ilmiah, khususnya riset terapan di bidang pertanian dan rekayasa.
1.1 Latar Belakang
Bagian ini memaparkan konteks permasalahan, yaitu potensi besar jeruk lemon di Indonesia yang membutuhkan inovasi pemanenan untuk efisiensi dan kualitas. Data ekspor dan impor jeruk menunjukkan peningkatan permintaan. Penelitian ini diposisikan sebagai solusi atas kendala pemanenan manual yang monoton, mahal, dan rentan kesalahan. Diuraikan juga kompleksitas robot pertanian dibandingkan robot industri karena lingkungan pertanian yang dinamis dan kompleks. Penggunaan komputer dan pengolahan citra digital sebagai solusi untuk mendapatkan hasil yang obyektif dan akurat juga dijelaskan, menjadikannya relevan dengan pendidikan dalam bidang sistem informasi dan teknologi digital dalam pertanian.
1.2 Tujuan Penelitian
Bagian ini menjabarkan tujuan utama penelitian, yaitu mengembangkan sistem deteksi otomatis untuk jeruk lemon. Lebih detail, tujuan spesifik diuraikan meliputi: karakterisasi citra jeruk lemon berdasarkan parameter warna RGB dan HSI, pengembangan algoritma eliminasi latar belakang, kalibrasi dan validasi sensor kamera, pengembangan rumus perhitungan posisi tiga dimensi, dan evaluasi sistem deteksi. Ini relevan secara pendidikan karena mendemonstrasikan bagaimana tujuan penelitian dipecah menjadi langkah-langkah yang terukur dan terarah, penting dalam metodologi penelitian.
1.3 Manfaat Penelitian
Bagian ini menjelaskan manfaat penelitian bagi pengembangan ilmu pengetahuan dan teknologi. Data karakteristik warna jeruk lemon dapat menjadi dasar pengembangan algoritma deteksi yang lebih akurat. Rumus perhitungan posisi tiga dimensi hasil kalibrasi dan validasi dapat diaplikasikan pada sistem robotika. Rancangan sistem deteksi otomatis dapat menjadi acuan bagi pengembangan teknologi pemanenan berbasis robot. Ini relevan secara pendidikan karena menunjukan dampak praktis dan aplikatif dari sebuah penelitian, mengajarkan mahasiswa untuk mempertimbangkan dampak risetnya.
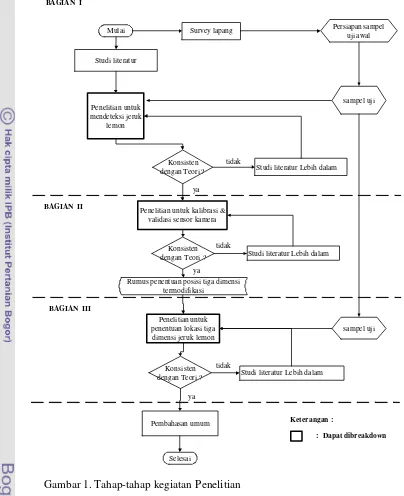
1.4 Kerangka Penelitian
Bagian ini menggambarkan alur penelitian secara sistematis melalui diagram alur. Terdapat tiga bagian utama: analisis karakteristik warna dan algoritma deteksi, kalibrasi dan validasi sensor kamera, dan penentuan posisi tiga dimensi. Penjelasan tahapan penelitian ini menunjukan pentingnya perencanaan dan metodologi riset yang terstruktur, hal penting dalam pendidikan tinggi.
II. KARAKTERISASI CITRA UNTUK DETEKSI BUAH JERUK LEMON PADA TANAMANNYA
Bab ini membahas karakterisasi citra jeruk lemon untuk keperluan deteksi. Dijelaskan latar belakang karakteristik morfologi dan komposisi jeruk lemon yang relevan dengan pengolahan citra. Metode penelitian meliputi pengambilan citra, pengukuran parameter warna (RGB dan HSI), dan analisis statistik untuk menentukan parameter yang efektif membedakan jeruk lemon dari latar belakangnya. Hasil penelitian berupa sebaran nilai parameter warna dan algoritma deteksi berbasis nilai ambang batas (thresholding). Pembahasan meliputi analisis karakteristik warna dan evaluasi algoritma deteksi. Simpulan bab ini merangkum parameter warna efektif untuk deteksi jeruk lemon dan keakuratan algoritma deteksi.
2.1 Pendahuluan
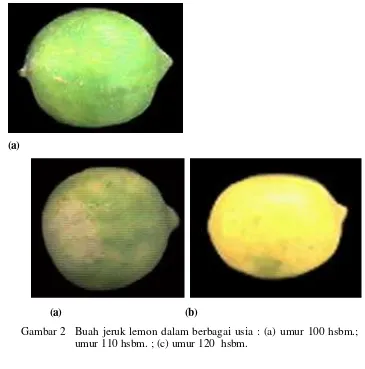
Bagian ini memberikan pengantar tentang karakteristik jeruk lemon, meliputi morfologi, komposisi, dan varietas. Penjelasan ini memberikan konteks penting untuk memahami bagaimana ciri-ciri fisik jeruk lemon akan diterjemahkan ke dalam data citra digital untuk keperluan deteksi. Relevansi pendidikan terletak pada penekanan pentingnya pengetahuan dasar tentang obyek penelitian sebelum melakukan analisis data.
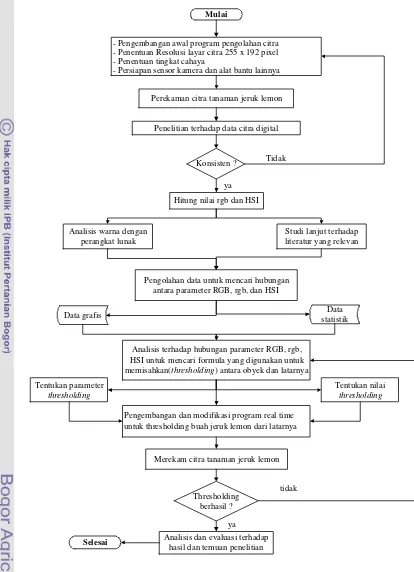
2.2 Bahan dan Metode
Bagian ini menjelaskan secara detail metodologi penelitian, termasuk jenis kamera, teknik pengambilan citra, metode pengukuran parameter warna (RGB dan HSI), dan analisis statistik yang digunakan. Hal ini penting secara pendidikan karena mendemonstrasikan detail metodologi yang valid dan dapat ditiru, sebuah komponen penting dalam penulisan karya ilmiah.
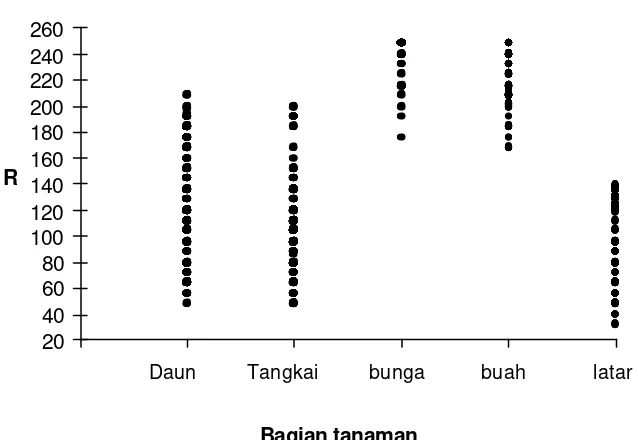
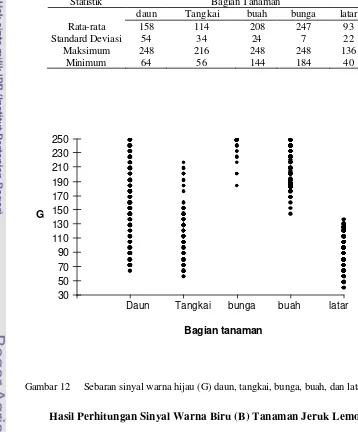
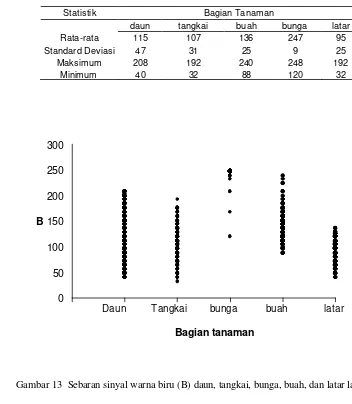
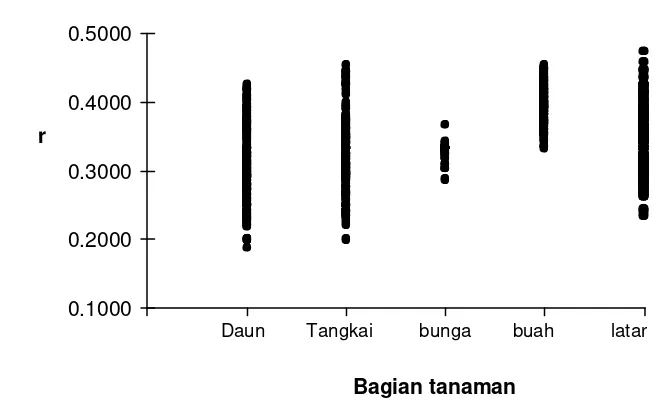
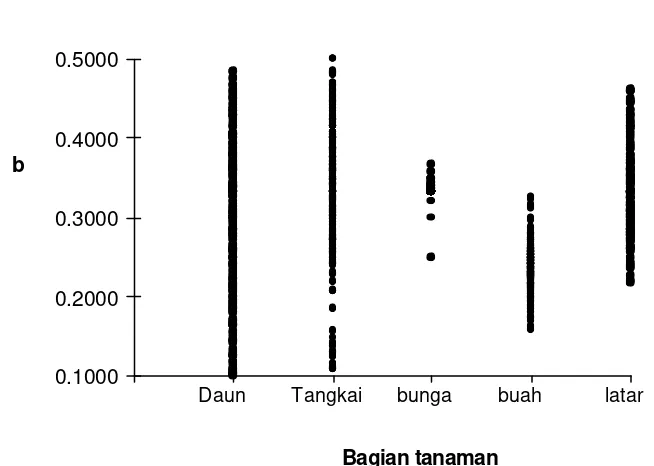
2.3 Hasil
Bagian ini menyajikan data hasil penelitian berupa tabel dan grafik sebaran nilai parameter warna (R, G, B, r, g, b, H, S, I) untuk berbagai komponen citra (jeruk lemon, daun, tangkai, bunga, latar belakang). Data ini merupakan dasar untuk pengembangan algoritma deteksi. Ini relevan secara pendidikan karena melatih mahasiswa untuk mempresentasikan data secara terstruktur dan ringkas.
2.4 Pembahasan
Bagian ini menganalisis hasil penelitian, meliputi interpretasi data sebaran parameter warna dan validasi algoritma deteksi. Didiskusikan juga keterbatasan metode dan saran perbaikan. Pembahasan ini melatih mahasiswa untuk berpikir kritis dan analitis dalam menginterpretasikan data, dan menghubungkan hasil dengan teori-teori yang relevan.
2.5 Simpulan
Bagian ini merangkum temuan utama bab ini, yaitu parameter warna yang efektif untuk membedakan jeruk lemon dari latar belakangnya dan keakuratan algoritma deteksi yang dikembangkan. Ini melatih mahasiswa untuk menyimpulkan hasil penelitian secara ringkas dan jelas, poin penting dalam penulisan ilmiah.
III. KALIBRASI DAN VALIDASI SENSOR KAMERA UNTUK PENGEMBANGAN RUMUS POSISI TIGA DIMENSI OBYEK
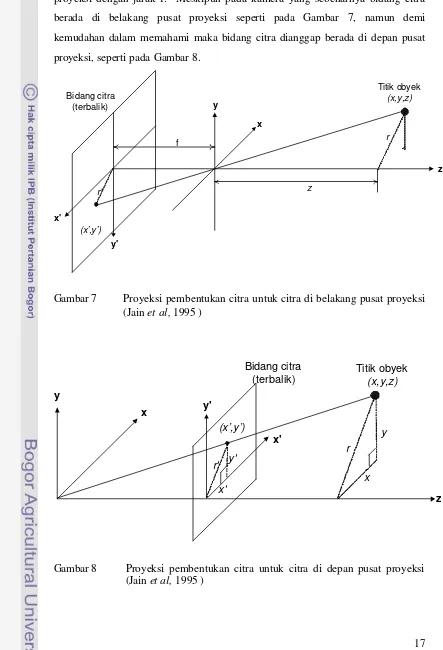
Bab ini membahas kalibrasi dan validasi sensor kamera untuk menentukan rumus perhitungan posisi tiga dimensi objek. Latar belakang meliputi metode perhitungan posisi tiga dimensi berbasis citra stereo. Metode penelitian meliputi kalibrasi kamera dengan berbagai jarak pergeseran, pengambilan citra objek uji, pengukuran jarak aktual, dan validasi rumus perhitungan jarak. Hasil penelitian berupa data kalibrasi kamera dan akurasi rumus perhitungan jarak. Pembahasan meliputi analisis data kalibrasi dan validasi, serta sumber kesalahan. Simpulan bab ini merangkum rumus perhitungan jarak yang valid dan tingkat akurasinya.
3.1 Pendahuluan
Bagian ini menjelaskan pentingnya kalibrasi dan validasi sensor kamera untuk memastikan akurasi pengukuran posisi tiga dimensi. Diuraikan metode-metode yang ada dalam penentuan posisi tiga dimensi menggunakan citra stereo, serta tantangannya dalam konteks pertanian. Ini relevan secara pendidikan karena memperkenalkan mahasiswa pada aspek penting dalam pengembangan sistem pengukuran berbasis sensor.
3.2 Bahan dan Metode
Bagian ini menjelaskan detail prosedur kalibrasi dan validasi kamera, termasuk jenis dan spesifikasi peralatan, teknik pengambilan data, serta metode perhitungan. Ini penting secara pendidikan karena mendemonstrasikan langkah-langkah sistematis dan terukur dalam proses kalibrasi dan validasi.
3.3 Hasil
Bagian ini menyajikan data hasil kalibrasi dan validasi kamera, meliputi hubungan antara jarak pergeseran kamera dan jarak objek, serta akurasi rumus perhitungan jarak. Data disajikan dalam bentuk tabel dan grafik. Ini relevan secara pendidikan karena memperkenalkan mahasiswa pada cara mempresentasikan data kuantitatif secara efektif dan visual.
3.4 Pembahasan
Bagian ini menganalisis hasil kalibrasi dan validasi, interpretasi data, dan pembahasan mengenai sumber kesalahan. Ini melatih mahasiswa dalam interpretasi data dan kemampuan analisis untuk menyimpulkan keterbatasan metode dan memberikan saran perbaikan.
3.5 Simpulan
Bagian ini merangkum temuan utama, yaitu rumus perhitungan jarak yang divalidasi, tingkat akurasi, dan keterbatasan metode. Ini relevan secara pendidikan karena melatih kemampuan meringkas hasil dan menyajikan kesimpulan yang jelas dan ringkas.
IV. UJI PENENTUAN POSISI TIGA DIMENSI BUAH JERUK LEMON PADA TANAMANNYA
Bab ini membahas pengujian sistem deteksi posisi tiga dimensi jeruk lemon. Metode penelitian meliputi integrasi algoritma deteksi dan rumus perhitungan posisi tiga dimensi yang telah divalidasi sebelumnya. Pengujian dilakukan pada kondisi acak dan terkontrol. Hasil penelitian meliputi data posisi tiga dimensi jeruk lemon dan akurasi sistem. Pembahasan meliputi analisis hasil pengujian, evaluasi sistem, dan sumber kesalahan. Simpulan bab ini merangkum kinerja sistem deteksi posisi tiga dimensi dan potensi pengembangan lebih lanjut.
4.1 Pendahuluan
Bagian ini menjelaskan tujuan dan ruang lingkup pengujian sistem deteksi tiga dimensi. Ini menjelaskan pentingnya pengujian untuk memvalidasi kinerja sistem dalam kondisi yang lebih realistis dibandingkan dengan kalibrasi dan validasi sebelumnya yang dilakukan pada kondisi terkontrol. Bagian ini juga mereview kembali metode dan rumus yang digunakan.
4.2 Bahan dan Metode
Bagian ini menjelaskan detail prosedur pengujian, meliputi setup eksperimen, metode pengambilan data, dan metode analisis data. Detail prosedur ini penting secara pendidikan karena menunjukan konsistensi dan keakuratan metodologi penelitian.
4.3 Hasil
Bagian ini menyajikan data hasil pengujian, meliputi data posisi tiga dimensi jeruk lemon yang diukur dan dihitung, serta akurasi sistem. Data disajikan dalam bentuk tabel dan grafik. Bagian ini penting secara pendidikan karena memperkenalkan mahasiswa pada cara mempresentasikan data kuantitatif dan kualitatif secara terstruktur dan visual.
4.4 Pembahasan
Bagian ini menganalisis hasil pengujian, meliputi interpretasi data, dan pembahasan mengenai sumber kesalahan. Interpretasi data ini penting secara pendidikan karena melatih mahasiswa untuk berpikir kritis dalam menginterpretasikan data, menghubungkannya dengan teori-teori yang relevan, dan mengidentifikasi faktor-faktor yang mempengaruhi akurasi sistem.
4.5 Simpulan
Bagian ini merangkum temuan utama bab ini, yaitu kinerja sistem deteksi tiga dimensi dalam berbagai kondisi, tingkat akurasi, dan keterbatasan metode. Bagian ini juga menyajikan saran untuk penelitian selanjutnya. Bagian ini penting secara pendidikan karena melatih mahasiswa untuk menyimpulkan hasil penelitian secara ringkas dan jelas, dan merumuskan saran untuk penelitian selanjutnya.
V. PEMBAHASAN UMUM
Bab ini memberikan pembahasan menyeluruh atas keseluruhan hasil penelitian, mengintegrasikan temuan dari bab-bab sebelumnya. Pembahasan mencakup keterbatasan metode, implikasi hasil penelitian, dan kontribusi penelitian terhadap pengembangan teknologi pemanenan jeruk lemon. Ini relevan secara pendidikan karena melatih kemampuan sintesis dan analisis komprehensif atas keseluruhan penelitian.
VI. SIMPULAN DAN SARAN
Bab ini merangkum kesimpulan utama penelitian, meliputi keberhasilan pengembangan sistem deteksi dan rumus posisi tiga dimensi, serta tingkat akurasi yang dicapai. Saran untuk penelitian selanjutnya diberikan, meliputi perbaikan algoritma, peningkatan akurasi, dan pengembangan sistem yang lebih komprehensif. Ini relevan secara pendidikan karena menunjukan bagaimana sebuah penelitian dapat memberikan kontribusi bagi pengembangan ilmu pengetahuan dan teknologi di masa depan.