RANCANG BANGUN SISTEM KEMUDI OTOMATIS
TRAKTOR PERTANIAN BERBASIS NAVIGASI GPS
(
GLOBAL POSITIONING SYSTEM
)
CECEP SAEPUL RAHMAN
SEKOLAH PASCASARJANA
INSTITUT PERTANIAN BOGOR
PERNYATAAN MENGENAI TESIS DAN
SUMBER INFORMASI
Dengan ini saya menyatakan bahwa tesis Rancang Bangun Sistem Kemudi
Otomatis Traktor Pertanian Berbasis Navigasi GPS (Global Positioning System) adalah karya saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk
apapun kepada perguruan tinggi manapun. Sumber informasi yang berasal atau dikutip
dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan
dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir tesis ini.
Bogor, Januari 2013
Cecep Saepul Rahman
ABSTRACT
CECEP SAEPUL RAHMAN. Development of Automatic Guidance for Agricultural
Tractor Based on GPS navigation. Supervised by DESRIAL and I DEWA MADE
SUBRATA.
Research about the application of automatic navigation system on agricultural
tractors has become one of the important research topics in the last two decades
especially in the developed countries where the issue of ‘Precision Farming’ application
is considered. GPS has been commonly used as the navigation system of vehicles
including tractors. The objective of the research was to develop smart tractor that would
work automatically based on GPS navigation for cultivation activity in precision
farming. Mechatronic navigation control system for agricultural riding tractor including
tractor steering, accelerator, clutch, brake system, and hydraulic control had been
successfully developed using microcontrollers. GPS interfacing and data processing
were also developed using Visual Basic 6.0 and functioned as the main control system.
Field test was done on 40 x 20 m area with tractor velocity 0.6 m/s. The average error of
control system was 17.9 cm.
RINGKASAN
CECEP SAEPUL RAHMAN. Rancang Bangun Sistem Kemudi Otomatis Traktor
Pertanian Berbasis Navigasi GPS (Global Positioning System). Dibimbing oleh DESRIAL dan I DEWA MADE SUBRATA.
Penelitian tentang aplikasi sistem navigasi otomatis pada traktor pertanian
menjadi salah satu topik penelitian yang penting pada dua decade terakhir, khususnya
pada negara-negara maju dimana issuetentang aplikasi “Precision Farming” (PF) sudah
menjadi hal yang harus dipertimbangkan. Sebagai negara berkembang yang berbasis
pada sektor pertanian dan sebagai langkah antisipasi pada kemungkinan perubahan
iklim dimasa mendatang, maka sudah saatnya di Indonesia dilakukan penelitian yang
berkaitan dengan precision farming dimana otomasi penggunaan traktor serta alat dan mesin pertanian sangat diperlukan.
Sistem navigasi manual traktor berbasis operator sangat bergantung pada kondisi
operator, sehingga ketelitian serta efektifitas hasil pekerjaan bergantung pada hal itu.
Kelelahan serta kekurang terampilan operator sering kali menurunkan kinerja
pengoperasian traktor, sehingga diperlukan adanya pengembangan sistem navigasi yang
ada untuk mengatasi hal itu, diantaranya dengan menggunakan sistem navigasi
otomatis.
Tujuan dari penelitian ini adalah pengembangan cikal bakal traktor pintar (smart tractor) yang dapat bekerja secara otomatis dalam mendukung kegiatan budidaya pertanian presisi (precision farming) meliputi: pengembangan sistem mekatronika stir, kopling, akselerator, rem dan implement serta pengaplikasian perangkat RTK-DGPS
pada sistem navigasi traktor.
Prosedur penelitian meliputi : 1) Identifikasi masalah, 2) Pengukuran gaya awal,
3) Perancangan sistem kemudi otomatis traktor, 4) Pembuatan sistem kemudi otomatis
traktor, 5) Uji fungsional, 6) Uji kinerja dan 7) Evaluasi hasil.
Sistem kontrol stir dibuat menggunakan motor DC 12 volt dengan sistem
pengukur posisi pedal akselerator. Tuas implemen digerakkan menggunakan motor DC
12 volt dengan sistem transmisi sproket rantai. Tinggi lower link implemen diukur berdasarkan posisi tuas yang diukur menggunakan potensiometer dan menjadi feedback
ke sistem. Pedal kopling digerakkan menggunakan motor DC 24 volt, sedangkan pedal
rem digerakkan menggunakan motor DC 12 volt.
Uji kalibrasi serta validasi dilakukan pada mekanisme kontrol stir, akselerator
serta implemen. Pada mekanisme kontrol stir, hasil uji validasi menunjukkan error rata-rata sebesar 0.6440. Error rata-rata pada mekanisme kontrol akselerator sebesar 2.71%, sedangkan pada mekanisme kontrol tuas implemen sebesar 0.56 cm.
Uji kinerja dilakukan pada 3 jenis lintasan, yaitu: lintasan garis lurus, lintasan
kotak serta pengolahan tanah menggunakan rotary harrower. Hasil pengujian menunjukkan error rata-rata pada lintasan lurus sebesar 12 cm, pada lintasan kotak sebesar 11.6 cm dan pada pengolahan tanah sebesar 17.9 cm. Secara umum sistem
kemudi otomatis hasil rancangan telah mampu mengarahkan traktor mengikuti lintasan
yang diinginkan.
©Hak Cipta milik IPB, tahun 2013
Hak Cipta dilindungi Undang-Undang
Dilarang mengutip sebagian atau seluruh karya tulis ini tanpa mencantumkan atau menyebutkan sumbernya. Pengutipan hanya untuk kepentingan pendidikan, penelitian, penulisan karya ilmiah, penyusunan laporan, penulisan kritik, atau tinjauan suatu masalah; dan pengutipan tersebut tidak merugikan kepentingan yang wajar IPB
RANCANG BANGUN SISTEM KEMUDI OTOMATIS
TRAKTOR PERTANIAN BERBASIS NAVIGASI GPS
(
GLOBAL POSITIONING SYSTEM
)
CECEP SAEPUL RAHMAN
Tesis
Sebagai salah satu syarat untuk memperoleh gelar
Magister Sains pada
Program Studi Teknik Mesin Pertanian dan Pangan
SEKOLAH PASCASARJANA
INSTITUT PERTANIAN BOGOR
Judul Tesis : Rancang Bangun Sistem Kemudi Otomatis Traktor Pertanian Berbasis
Navigasi GPS (Global Positioning System)
Nama : Cecep Saepul Rahman
NRP : F151100041
Program Studi : Teknik Mesin Pertanian dan Pangan
Disetujui:
Komisi Pembimbing
Dr. Ir. Desrial, M.Eng
Ketua
Dr. Ir. I Dewa Made Subrata M.Agr
Anggota
Diketahui:
Ketua Program Studi
Teknik Mesin Pertanian dan Pangan
Dr. Ir. Setyo Pertiwi, M. Agr
Dekan Sekolah Pascasarjana
Dr. Ir. Dahrul Syah, M.Sc.Agr
PRAKATA
Puji dan syukur penulis panjatkan kepada Allah SWT atas segala karunia-Nya
sehingga karya ilmiah dengan judul Rancang Bangun Sistem Kemudi Otomatis Traktor
Pertanian Berbasis Navigasi GPS (Global Positioning System). Penelitian dilaksanakan mulai bulan Januari sampai dengan November 2012 di Laboratorium Lapang Siswadi
Soepardjo, Departemen Teknik Mesin dan Biosistem IPB, Bogor. Penelitian ini dibiayai
sepenuhnya oleh Program Hibah Kompetisi IMHERE B2c IPB tahun 2010 hingga
2012.
Pada kesempatan ini penulis mengucapkan terima kasih kepada:
1. Dr. Ir. Desrial, M.Eng selaku ketua komisi pembimbing atas segala bimbingan,
arahan dan masukannya selama proses penelitian berlangsung hingga penulisan
tesis ini selesai dan juga selaku ketua peneliti atas kesempatan dan kepercayaan
yang diberikan kepada penulis menjadi bagian dalam penelitian.
2. Dr. Ir. I Dewa Made Subrata, M.Agr selaku pembimbing kedua atas segala
koreksi, bimbingan dan arahannya dalam menyusun tesis ini
3. Prof. Dr. Ir. Tineke Mandang, MS selaku dosen penguji luar komisi.
4. Dr. Ir. Setyo Pertiwi, M.Agr selaku ketua Program Studi Teknik Mesin Pertanian
dan Pangan.
5. Staf, laboran dan teknisi laboratorium lapangan Siswadi Supardjo, Teknik Mesin
Biosistem, Fateta IPB atas bantuannya selama proses penelitian.
6. Teman-teman TMP 2010, Nisa, Angga, Eno, Galih dan Trisnawahyudi atas
bantuannya selama proses pembuatan dan pengujian.
7. Program I-MHERE B2.c IPB atas beasiswa yang diberikan kepada penulis
selama masa studi (2010-2012) dan biaya penelitian yang telah diberikan.
8. Kedua orang tua Bapak Djuen Ruhiat dan Amay Rumayah, atas segala
pengorbanan dan dukungan yang tak ternilai yang diberikan kepada penulis.
Semoga karya ilmiah ini dapat dimanfaatkan sebaik-baiknya untuk kemajuan
ilmu dan pengetahuan bangsa Indonesia.
Bogor, Januari 2013
RIWAYAT HIDUP
Penulis dilahirkan pada tanggal 9 November 1987 di Tamansari, Tasikmalaya,
Jawa Barat. Penulis merupakan anak ketujuh dari Sembilan bersaudara, dari pasangan
Djuen Ruhiat dan Amay Rumayah. Penulis lulus dari MA Husnul Khotimah dan
melanjutkan pendidikan S1 di Jurusan Teknik Pertanian Fakultas Teknologi Pertanian
Institut Pertanian Bogor pada tahun 2005 melalui jalur USMI. Selama mengikuti
perkuliahan penulis aktif menjadi asisten mata kuliah dan praktikum, diantaranya:
Statika dan Dinamika serta Gambar Teknik. Penulis menyelesaikan studi S1 pada tahun
2010. Penulis melanjutkan studi S2 di Teknik Mesin Pertanian dan Pangan, Sekolah
Pascasarjana, Institut Pertanian Bogor pada tahun 2010 dengan bantuan beasiswa
i
DAFTAR ISI
DAFTAR TABEL... iii
DAFTAR GAMBAR ... v
DAFTAR LAMPIRAN ... ix
I PENDAHULUAN ... 1
Latar Belakang ... 1
Rumusan Masalah ... 1
Tujuan ... 2
II TINJAUAN PUSTAKA ... 3
Pertanian Presisi ... 3
Traktor Pintar ... 4
Global Positioning System ... 9
Mikrokontroler ... 12
Sistem Kontrol Pergerakan Traktor ... 14
Tenaga Penggerak ... 16
III TINJAUAN PUSTAKA ... 18
Waktu dan Tempat Penelitian ... 18
Alat dan Bahan ... 18
Tahapan Penelitian ... 19
Prosedur Pengujian ... 22
IV PENDEKATAN RANCANGAN ... 27
Kriteria Perancangan ... 27
Rancangan Fungsional ... 27
Analisis Teknik ... 28
Rancangan Struktural ... 36
ii
V HASIL DAN PEMBAHASAN ... 54
Identifikasi Masalah ... 54
Pengukuran Gaya Awal ... 55
Perancangan Sistem Kemudi Otomatis Traktor ... 56
Pembuatan Sistem Kemudi Otomatis Traktor ... 60
Pengujian Fungsional ... 66
Pengujian Kinerja ... 72
VI KESIMPULAN DAN SARAN ... 81
Kesimpulan ... 81
Saran ... 81
DAFTAR PUSTAKA ... 83
iii
DAFTAR TABEL
1 Kebutuhan tingkat akurasi data untuk pekerjaan traktor pintar pada lahan
pertanian... 6
2 Perangkat keras yang digunakan ... 18
3 Penentuan sudut roda depan traktor ... 53
4 Kalibrasi antara jarak real dengan hasil pengolahan GPS. ... 71
5 Hasil pengujian sistem navigasi lintasan garis lurus ... 73
6 Hasil pengujian sistem navigasi lintasan kotak... 75
v
DAFTAR GAMBAR
1 Prototipe traktor pintar yang menerapkan sistem pengendalian terpadu
(Scarlett 2001). ... 5
2 Pengembangan traktor cerdas dan hasil pengujian yang dilakukan
(Ahamed 2006)... 7
3 Pengembangan traktor cerdas; (a) metode fuzzy yang digunakan,
(b) traktor yang dikembangkan dan (c) hasil pengujian (Perez et al 2008)... 8 4 Pengembangan traktor cerdas; (a) traktor yang dikembangkan, (b) Hasil
pengujian tanpa implemen dan (c) menggunakan implemen (Annas 2012) ... 9
5 Ilustrasi penggunaan real time DGPS (El-Rabbany 2002) ... 10 6 Konfigurasi pin ATmega 8535 (Atmel 2010) ... 13
7 Sinyal lup terbuka (Annas 2012)... 14
8 Sinyal lup tertutup (Annas 2012) ... 14
9 Tipe pergerakan robot beroda; (a) pergerakan titik ke titik, (b) mengikuti
jalur dan (c) mengikuti lintasan (De Luca et al 1998) ... 15 10 Motor listrik; (a) DC dan (b) AC ... 16
11 Aktuator hidrolik ; (a) silinder hidrolik dan (b) motor hidrolik ... 17
12 Bagan alir proses penelitian ... 20
13 Layout alat... 21 14 layout set-up pengujian ... 24 15 Layout jalur pengujian sistem navigasi traktor (a) petakan
dan (b) pengolahan tanah. ... 26
16 Diagram benda bebas mekanisme pengontrol stir ... 29
17 Diagram benda bebas unit pengontrol kopling ... 30
18 Diagram benda bebas unit pengontrol akselerator ... 32
19 Diagram benda bebas unit pengontrol pedal rem ... 34
20 Diagram benda bebas unit pengontrol tuas implemen ... 35
21 Grafik pemilihan ukuran rantai (Srivastava et al, 2006) ... 36 22 Mekanisme unit pengontrol stir kemudi ... 37
23 Mekanisme unit pengontrol pedal kopling ... 38
vi
25 Mekanisme unit pengontrol pedal rem ... 39
26 Mekanisme unit pengontrol tuas implemen ... 40
27 Diagram sistem kontrol traktor ... 41
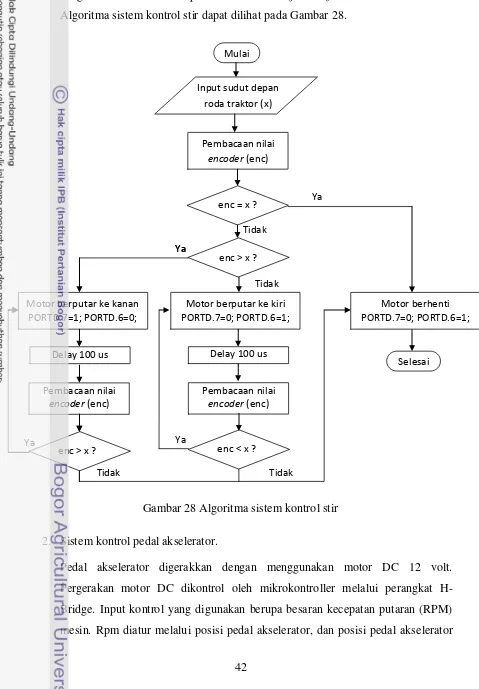
28 Algoritma sistem kontrol stir ... 42
29 Algoritma sistem kontrol akselerator ... 43
30 Algoritma sistem kontrol tuas implemen ... 44
31 Algoritma sistem kontrol pedal kopling ... 45
32 Algoritma sistem kontrol pedal rem ... 46
33 Algoritma penentuan parameter lintasan olah ... 48
34 Sketsa penentuan lintasan olah ... 49
35 Sketsa penentuan titik belok dan area belok pada setiap lintasan ... 49
36 Algoritma pengolahan data GPS ... 50
37 Ilustrasi sudut orientasi terhadap simpangan yang terjadi ... 52
38 Contoh pengukuran gaya untuk memutar stir kemudi ... 55
39 Pemrograman sistem mikrokontroler menggunakan CodeVision AVR ... 60 40 Rangkaian elektronik yang digunakan dalam sistem kontrol ... 61
41 Sistem kontrol stir ; (a) mekanisme dan (b) sistem pembacaan sudut putar
roda depan ... 62
42 Mekanisme kontrol pedal kopling ... 62
43 Mekanisme kontrol pedal rem... 63
44 Mekanisme kontrol pedal akselerator ... 63
45 Mekanisme kontrol tuas implemen ... 64
46 Tampilan sistem navigasi traktor berdasarkan posisi GPS ... 65
47 Unit penerima dan pengolah data GPS ... 65
48 Traktor yang telah dilengkapi mekanisme kontrol ... 66
49 Uji fungsional unit pengontrol traktor ; (a) Kalibrasi dan (b) validasi ... 67
50 Grafik respon stir terhadap waktu ... 68
51 Uji fungsional unit kontrol pedal akselerator; (a) kalibrasi dan (b) validasi ... 69
vii
55 Pegujian sistem navigasi lintasan lurus ; (a) tanpa simpangan
dan (b) penggunaan simpangan awal ... 74
56 Pegujian sistem navigasi traktor lintasan kotak ... 75
57 Pegujian sistem navigasi traktor pada pengolahan tanah menggunakan
rotary harrower ... 76 58 Pesan GPS yang diterima; (a) pesan terpotong dan (b) pesan sempurna ... 77
59 Kondisi tanah pengujian; (a) sebelum pengolahan dan (b) setelah
pengolahan ... 78
60 Hubungan besar simpangan dan waktu yang dibutuhkan untuk kembali ke
lintasan set-point ... 78 61 Hubungan besar simpangan dan panjang lintasan yang dibutuhkan untuk
ix
DAFTAR LAMPIRAN
1 Deskripsi pesan GPS tipe “GPGGA” ... 86
2 Contoh Pengolahan Data GPS ... 87
3 Outback® S3 GPS Guidance and Mapping System ... 90
4 DT-AVR Low Cost Micro System... 92
5 EMS 30A H-Bridge ... 94 6 EP50S8-360-2R-P-24 Autonics Absolute Encoder... 95
7 Skema Rangkaian Kontrol ... 96
8 Gambar Teknik Sistem Kemudi Traktor Otomatis ... 97
9 Gambar Teknik Unit Pengontrol Stir ... 98
10 Gambar Teknik Unit Pengontrol Pedal Kopling ... 99
11 Gambar Teknik Unit Pengontrol Pedal Akselerator ... 100
12 Gambar Teknik Unit Pengontrol Pedal Rem ... 101
1
I
PENDAHULUAN
Latar Belakang
Penelitian tentang aplikasi sistem navigasi otomatis pada traktor pertanian
menjadi salah satu topik penelitian yang penting pada dua dekade terakhir, khususnya
pada negara-negara maju dimana isu tentang aplikasi precision farming sudah menjadi hal yang harus dipertimbangkan. Sebagai negara berkembang yang berbasis pada sektor
pertanian dan sebagai langkah antisipasi pada kemungkinan perubahan iklim di masa
mendatang, maka sudah saatnya di Indonesia dilakukan penelitian yang berkaitan
dengan precision farming dimana otomasi penggunaan traktor serta alat dan mesin pertanian sangat diperlukan.
Sistem navigasi manual traktor berbasis operator sangat bergantung pada kondisi
operator, sehingga ketelitian serta efektifitas hasil pekerjaan bergantung pada hal itu.
Kelelahan serta kekurangterampilan operator sering kali menurunkan kinerja
pengoperasian traktor, sehingga diperlukan adanya pengembangan sistem navigasi yang
ada untuk mengatasi hal itu, di antaranya dengan menggunakan sistem navigasi
otomatis.
Beberapa penelitian sebelummya telah dilakukan untuk mengembangkan sistem
navigasi, seperti pada penelitian Bell et al. (2000) yang menunjukkan aplikasi traktor pintar menggunakan Carrier-Phase Differential GPS menunjukkan tingkat akurasi yang tinggi pada skenario lintasan busur lingkaran, spiral dan kurva untuk traktor pertanian.
Sedangkan Easterly et al. (2010), memadukan penggunaan Global Navigation Satellite System (GNSS) dan sensor penginderaan vision sensing system dengan tingkat ketelitian mencapai 2 in (51 mm) pada kecepatan maju traktor antara 2-5 m/s.
Pada penelitian ini digunakan perangkat RTK-DGPS yang cocok untuk
mengetahui posisi objek yang sedang bergerak. Penelitian ini bertujuan sebagai langkah
awal untuk pengembangan traktor pintar (smart tractor) di Indonesia yang dilengkapi dengan sistem kemudi otomatis.
Rumusan Masalah
2
aplikasi pertanian presisi adalah otomasi mesin-mesin pertanian di antaranya traktor
pertanian. Sistem kemudi otomatis berbasis RTK-DGPS pada traktor diharapkan
mampu meningkatkan ketelitian dan produktifitas traktor dalam proses budidaya
pertanian.
Tujuan
Secara umum tujuan dari penelitian ini adalah pengembangan cikal bakal traktor
pintar (smart tractor) yang dapat bekerja secara otomatis dalam mendukung kegiatan budidaya pertanian presisi (precision farming). Adapun tujuan khusus dari penelitian ini adalah :
1. Mengembangkan sistem kontrol dan mekatronika stir, kopling, akselerator, rem
dan implemen pada traktor pertanian.
3
II
TINJAUAN PUSTAKA
Pertanian Presisi
Pertanian presisi merupakan sebuah konsep manajemen yang mengumpulkan
data dari berbagai sumber untuk menghasilkan sebuah keputusan yang berkenaan
dengan produksi pertanian (Shields, 1998). Menurut Brase (2005), pertanian presisi
(precision agriculture) juga disebut sebagai pertanian spesifik lokasi yang bertujuan mengumpulkan data untuk pengambilan keputusan mengenai produksi pertanian yang
sesuai dengan lokasi tertentu. Secara umum, pertanian presisi didefinisikan sebagai
sistem menejemen produksi pertanian yang berbasis teknologi informasi untuk
mengidentifikasi, menganalisis, dan mengelola faktor-faktor produksi untuk
mengoptimumkan keuntungan, daya tahan, dan perlindungan sumber daya lahan (Singh,
2007).
Ada lima komponen teknologi yang digunakan dalam pertanian presisi, yaitu
Geographical Information System (GIS), Global Positioning System (GPS), sensors, variable rate technology, dan, yield monitoring (Rains dan Thomas 2009).
1. GIS merupakan suatu sistem yang terdiri dari komponen perangkat keras, perangkat
lunak, data geografis, dan sumber daya manusia yang bekerja bersama secara
efektif untuk memasukkan, menyimpan, memperbaiki, memperbaharui, mengelola,
memanipulasi, mengintegrasikan, menganalisa, dan menampilkan data dalam suatu
informasi berbasis geografis (Tim Teknis Nasional 2007).
2. GPS adalah jantung dari pertanian presisi (Searcy 1997). Sistem ini bertanggung
jawab dalam merekam lokasi mesin ketika bergerak di lahan, posisi dan hasil
pengukuran direkam secara simultan yang dapat menghasilkan gambar berupa peta.
Informasi posisi yang diberikan dapat ditingkatkan akurasinya dengan koreksi
sinyal Differential GPS (DGPS), Kecepatan maju alat juga dapat diukur menggunakan penerima DGPS, dimana akurasi pengukuran ditentukan oleh
kualitas penerima yang digunakan dan juga kecepatan alat. Pengukuran tidak akan
akurat untuk kecepatan mesin yang lambat (<1.5 mph).
3. Sensor yang dipasang pada kendaraan aplikator dapat memberikan data yang dapat digunakan untuk menilai kondisi lapangan dan untuk menentukan (secara
4
sensor yang umum digunakan antara laian : sensor Doppler seperti radar untuk menentukan kecepatan kendaraan aplikator (Sudduth 1999), kamera CCD untuk
aplikasi deteksi rintangan (Ahmad et al 2011 ; Apostolopoulos et al 1999), sensor ultrasonik untuk aplikasi deteksi rintangan (Borenstein dan Koren 1988).
4. VRT mencakup kontrol komputer dan perangkat keras yang terkait untuk mengatur
jumlah keluaran dari pupuk, kapur, dan pestisida. Kontrol ini dibuat oleh beberapa
perusahaan dan secara umum menggunakan peta aplikasi yang ada pada GPS untuk
menentukan lokasi lahan dan mengendalikan perangkat keras yang mengatur
tingkat aplikasi (Rains dan Thomas 2009). Secara agronomi, sistem variable rate
memberikan pengertian bahwa target pemupukan didasarkan atas hasil pengujian
tanah dan berhubungan dengan sistem informasi kandungan hara tanah. Secara
ekonomi, sistem variable rate berhubungan dengan biaya yang harus dikeluarkan untuk pemupukan pada suatu areal pertanian. Pendekatan lingkungan, sistem
variable rate membantu untuk mencegah pemupukan yang berlebihan yang dapat
menyebabkan terjadinya masalah lingkungan (Setiawan 2001).
5. Yield monitoring merupakan metode langsung untuk mengetahui hasil produksi dari lahan dan bagaimana mengaturnya agar lebih baik. (Rains dan Thomas 2009).
Penelitian yang dilakukan oleh Arnholt (2001) menunjukkan bahwa kombinasi
antara yield monitoring dan GPS dapat meningkatkan keuntungan bersih, hal ini berarti bahwa yield monitoring hanya akan menunjukkan nilai yang signifikan ketika analisis spasial dihasilkan dan hal ini membutuhkan teknologi GPS.
Traktor Pintar
Mayoritas operasi lahan pertanian dilakukan oleh traktor dengan kombinasi
implemen atau aplikator yang sesuai dengan kebutuhan. Kualitas kerja dan output dari
kombinasi traktor tersebut bergantung pada keterampilan dan konsentrasi kerja operator.
Saat ini sistem elektronik untuk membantu meringankan kerja operator dan
meningkatkan respon pada traktor telah banyak dikembangkan seperti misalnya
perangkat elektronik pada mesin, transmisi, hidrolik dan pengendalian traksi pada
traktor (Holtmann 1999). Namun, untuk mengoptimalkan kinerja serta efisiensi traktor
diperlukan sebuah mekanisme untuk mengkoordinasikan semua kerja dari sistem
5
Konsep traktor pintar dirancang untuk menerapkan semua kontrol secara
terintegrasi dengan seluruh sistem serta mengotomatisasi koordinasi antara traktor dan
jenis pekerjaan untuk mencapai efisiensi operasi baik secara kinerja maupun nilai
ekonomi serta mengurangi beban kerja dan kelelahan. Pada Gambar 1 ditunjukkan
prototipe traktor pintar yang menerapkan sistem pengendalian terpadu menurut Scarlett
(2001) adalah sebagai berikut :
1. Traktor dilengkapi dengan kontrol berbasis mikroprosesor yang bertanggung
jawab untuk setiap sub sistem seperti mesin, powershift, transmisi,
elektro-hidrolik, traksi driveline dan lain sebagainnya.
2. Kontrol berbasis mikroprosesor sub-sistem terpasang pada masing-masing
implemen.
3. Pusat unit kontrol dan antarmuka operator terletak di kabin kendaraan/traktor.
4. Antar-komunikasi/kontrol jaringan menghubungkan masing-masing sub-sistem
ke unit kontrol pusat dan antarmuka operator.
Gambar 1 Prototipe traktor pintar yang menerapkan sistem pengendalian terpadu
(Scarlett 2001).
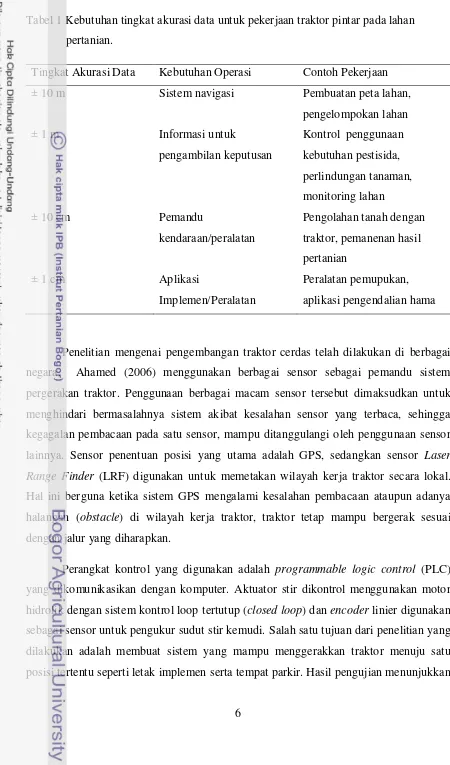
Auernhammer (2000) menyatakan bahwa kebutuhan tingkat akurasi data dari
traktor pintar berbeda tergantung kebutuhan operasi yang dilakukan. Hal ini dapat
6
Tabel 1 Kebutuhan tingkat akurasi data untuk pekerjaan traktor pintar pada lahan
pertanian.
Tingkat Akurasi Data Kebutuhan Operasi Contoh Pekerjaan
± 10 m Sistem navigasi Pembuatan peta lahan,
pengelompokan lahan
Penelitian mengenai pengembangan traktor cerdas telah dilakukan di berbagai
negara. Ahamed (2006) menggunakan berbagai sensor sebagai pemandu sistem
pergerakan traktor. Penggunaan berbagai macam sensor tersebut dimaksudkan untuk
menghindari bermasalahnya sistem akibat kesalahan sensor yang terbaca, sehingga
kegagalan pembacaan pada satu sensor, mampu ditanggulangi oleh penggunaan sensor
lainnya. Sensor penentuan posisi yang utama adalah GPS, sedangkan sensor Laser Range Finder (LRF) digunakan untuk memetakan wilayah kerja traktor secara lokal. Hal ini berguna ketika sistem GPS mengalami kesalahan pembacaan ataupun adanya
halangan (obstacle) di wilayah kerja traktor, traktor tetap mampu bergerak sesuai dengan jalur yang diharapkan.
Perangkat kontrol yang digunakan adalah programmable logic control (PLC) yang dikomunikasikan dengan komputer. Aktuator stir dikontrol menggunakan motor
hidrolik dengan sistem kontrol loop tertutup (closed loop) dan encoder linier digunakan sebagai sensor untuk pengukur sudut stir kemudi. Salah satu tujuan dari penelitian yang
dilakukan adalah membuat sistem yang mampu menggerakkan traktor menuju satu
7
bahwa sistem yang dibangun mampu menggerakkan traktor menuju posisi target dengan
simpangan posisi 2 cm dan sudut 10 menggunakan sensor LRF dan 15 cm dengan
menggunakan metode dead reckoning. Traktor yang digunakan pada penelitian serta contoh hasil pengujian dapat dilihat pada Gambar 2.
Gambar 2 Pengembangan traktor cerdas dan hasil pengujian yang dilakukan (Ahamed 2006)
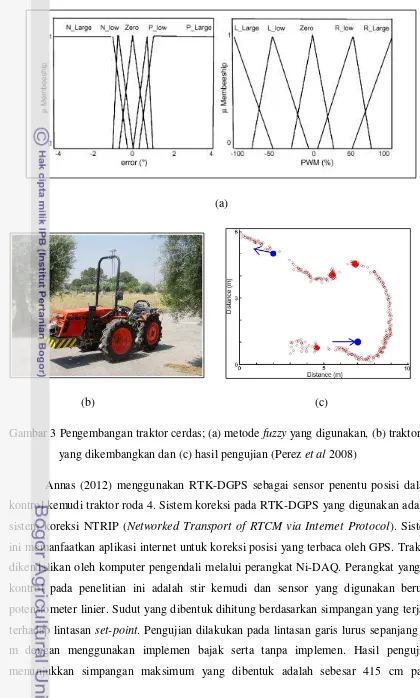
Perez et al (2008) melakukan penelitian mengenai otomasi traktor pada traktor pertanian konvensional. Sistem sensor yang digunakan adalah DGPS, kompas digital
serta sistem dead reckoning (DR). DGPS digunakan sebagai penentu posisi secara umum, dikarenakan bersifat absolute di semua tempat. Kekurangan dari GPS adalah
sangat tergantung pada satelit, sehingga ketika traktor berada dekat bangunan atau
pohon, akurasi DGPS dapat menurun. Cuaca juga sangat mempengaruhi tingkat akurasi.
Metode dead reckoning digunakan untuk mengatasi masalah ketika akurasi DGPS terganggu. Sistem ini memanfaatkan posisi terakhir traktor serta pembacaan odometer,
sehingga dapat diduga posisi traktor selanjutnya.
Perangkat kontrol yang digunakan berupa sebuah mikroprosesor yang
dikomunikasikan dengan komputer melalui perangkat wifi. Aktuator yang dikontrol
adalah perangkat stir kemudi, pedal rem dan kopling. Aktuator tersebut digerakkan
menggunakan motor hidrolik. Kontrol aktuator stir kemudi dilakukan menggunakan
metode logika fuzzy berdasarkan error sudut yang dibentuk dan menghasilkan output
berupa kecepatan putar motor hidrolik. Salah satu pengujian yang dilakukan berupa
navigasi traktor dari satu baris menuju baris lintasan selanjutnya berjarak 10 m dengan
8 (a)
(b) (c)
Gambar 3Pengembangan traktor cerdas; (a) metode fuzzy yang digunakan, (b) traktor yang dikembangkan dan (c) hasil pengujian (Perez et al 2008)
Annas (2012) menggunakan RTK-DGPS sebagai sensor penentu posisi dalam
kontrol kemudi traktor roda 4. Sistem koreksi pada RTK-DGPS yang digunakan adalah
sistem koreksi NTRIP (Networked Transport of RTCM via Internet Protocol). Sistem ini memanfaatkan aplikasi internet untuk koreksi posisi yang terbaca oleh GPS. Traktor
dikendalikan oleh komputer pengendali melalui perangkat Ni-DAQ. Perangkat yang di
kontrol pada penelitian ini adalah stir kemudi dan sensor yang digunakan berupa
potensiometer linier. Sudut yang dibentuk dihitung berdasarkan simpangan yang terjadi
terhadap lintasan set-point. Pengujian dilakukan pada lintasan garis lurus sepanjang 40 m dengan menggunakan implemen bajak serta tanpa implemen. Hasil pengujian
9
pengujian tanpa bajak dan 123 cm pada lintasan dengan menggunakan implemen bajak
singkal. Hasil pengujian dapat dilihat pada Gambar 4.
(a) (b) (c)
Gambar 4Pengembangan traktor cerdas; (a) traktor yang dikembangkan, (b) Hasil
pengujian tanpa implemen dan (c) menggunakan implemen (Annas 2012)
Global Positioning System
Global Positioning System (GPS) adalah salah satu teknologi kunci yang memungkinkan terwujudnya pertanian presisi. GPS terdiri atas konstelasi 24 satelit
pada ketinggian orbit di atas bumi yang menempati 6 orbit yang mengelilingi bumi.
Satelit ini secara terus menerus mentransmisikan sinyal radio yang diambil dan
diuraikan dengan penerima khusus (Rains dan Thomas 2009). Posisi yang
diinformasikan oleh GPS adalah posisi tiga dimensi (3D) dinyatakan dalam lintang
(latitude), bujur (longitude) dan tinggi (altitude), akan tetapi biasanya pernyataan posisi hanya dalam dua dimensi (2D) yaitu lintang dan bujur saja. Sistem penentuan posisi
global GPS terdiri dari tiga segmen utama yaitu segmen angkasa (space segment) yang terdiri atas satelit-satelit GPS yang selesai terpasang di awal tahun 1990 yang awalnya
terdiri dari konstelasi 18 satelit operasi ditambah 3 dalam orbit dan saat ini bertambah
10
Akurasi GPS dalam menentukan posisi dipengaruhi oleh cuaca dan aktivitas
penerima, menurut Ehsani (2003) akurasi GPS biasa yang bekerja pada aktivitas
dinamis akan menurun dibandingkan jika dioperasikan pada aktivitas statis. Untuk
meningkatkan akurasi penentuan lokasi, maka digunakan metode Real Time Kinematic
(RTK) dimana pada metode tersebut dua receiver GPS melakukan tracking pada satelit yang sama sehingga akurasi pengukuran dapat meningkat hingga 2-5 cm (El-Rabbany
2002). Untuk merealisasikan tuntutan real time tersebut, stasiun referensi harus mengirimkan error pseudorange-nya ke pengguna secara real-time menggunakan format Radio Technical Commission for Maritime Service (RTCM). Stasiun referensi dan pengguna harus dilengkapi dengan perangkat pemancar dan penerima data.
Gambar 5Ilustrasi penggunaan real time DGPS (El-Rabbany 2002)
Stephen dan Rasmusen (2010) menyatakan bahwa akurasi sistem RTK sangat
dipengaruhi oleh jarak yang terbentuk antara stasiun referensi (base station) dan rover, semakin jauh jarak yang terbentuk, akurasi yang didapatkan semakin menurun.
Umumnya base station berada pada radius 6 – 10 mil dari rover GPS.
Pesan GPS dibaca oleh penerima GPS dalam bentuk pesan yang mengikuti
protocol NMEA 0183. Ada beberapa jenis tipe pesan yang biasa digunakan dalam GPS,
salah satunya “GPGGA”. Format data GPS dengan tipe “GPGGA” berisikan data waktu dan posisi yang fix. Deskripsi pesan GPS dengan tipe “GPGGA” dapat dilihat pada
Lampiran 1.
Pembacaan data GPS memberikan informasi posisi dalam bentuk derajat bujur
11
Transverse Mercator) merupakan sebuah sistem yang menggunakan koordinat kartesian dua dimensi untuk memetakan posisi di permukaan bumi. UTM membagi wilayah
berdasarkan garis bujur menjadi 60 zona, dengan lebar zona 60. Datum yang digunakan
mengacu pada world geodetic system (WGS) 84 yang disepakati pada tahun 1984. Datum adalah parameter acuan yang digunakan untuk mendefinisikan geometri
ellipsoid bumi. Snyder (1987) menyatakan bahwa nilai koordinat x dan y dapat dihitung menggunakan persamaan:
Dimana k0 adalah faktor skala = 0.9996
N = a/(1 – e2)1/2 ... (3)
a = jari-jari equator bumi = 6378135 m
b = jari-jari polar bumi= 6.356.750 m
Ø = derajat lintang (latitude) dalam radian
λ = derajat bujur (longitude) dalam radian
λ0 = derajat meridian tengah (central meridian)dalam radian
N = radius kelengkungan (m)
M = jarak sebenarnya dari garis equator ke derajat lintang sepanjang garis meridian
tengah.
12
Koordinat x dan y yang dihasilkan pada persamaan merupakan jarak dari garis
equator dan garis meridian. Jarak antara dua titik dengan koordinat GPS dapat
dipermudah dengan menggunakan persamaan yang dinyatakan oleh Srivastava et al.
(2006). Persamaan tersebut adalah :
Kx = perubahan jarak pada tiap radian bujur (m/rad)
Ky = perubahan jarak pada tiap radian lintang (m/rad)
Mikrokontroler
Mikrokontroler merupakan komputer mikro yang dibuat dalam bentuk chip
semikonduktor. Mikrokontroller telah banyak digunakan di berbagai peralatan
elektronik, dari peralatan rumah tangga, perangkat audio-video, pengendali
mesin-mesin industri sampai pesawat ruang angkasa. Sebuah komputer mikro memiliki tiga
komponen utama, unit pengolah pusat, memori, dan sistem input/output untuk
dihubungkan dengan perangkat luar (Usman, 2008).
Mikrokontroler yang ada saat ini salah satunya adalah mikrokontroler jenis AVR
(Advanced Virtual RISC ) yang pertama kali dikembangkan pada tahun 1996 oleh dua orang mahasiswa Norwegian Institute of Technology yaitu Alf-Egil Bogen dan Vegard
Wollan. Mikrokontroler AVR kemudian dikembangkan lebih lanjut oleh Atmel. Saat ini
mikrokontroller AVR memiliki banyak seri, setiap seri memiliki perbedaan
kemampuan, feature-feature, ukuran chip dan harga, dimana beberapa seri
mikrokontroller ini telah memiliki ADC dan PWM. Mikrokontroler AVR menggunakan
teknologi RISC (Reduced Instruction Set Computer), yang memberikan kemampuan untuk melaksanakan instruksi dengan cepat karena mengurangi jumlah instruksi level
mesin. Pengurangan jumlah instruksi ini berpengaruh pada kecepatan yang disebabkan
karena dengan jumlah instruksi mesin yang terbatas, kebanyakan dapat berjalan dalam
13
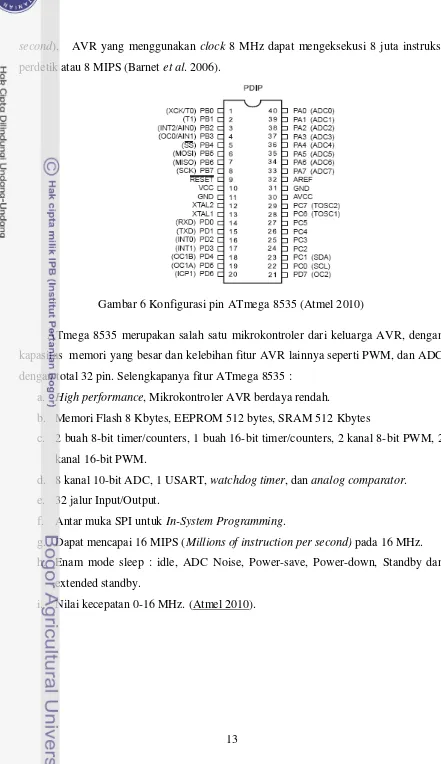
second), AVR yang menggunakan clock 8 MHz dapat mengeksekusi 8 juta instruksi perdetik atau 8 MIPS (Barnet et al. 2006).
Gambar 6 Konfigurasi pin ATmega 8535 (Atmel 2010)
ATmega 8535 merupakan salah satu mikrokontroler dari keluarga AVR, dengan
kapasitas memori yang besar dan kelebihan fitur AVR lainnya seperti PWM, dan ADC
dengan total 32 pin. Selengkapanya fitur ATmega 8535 :
a. High performance, Mikrokontroler AVR berdaya rendah.
b. Memori Flash 8 Kbytes, EEPROM 512 bytes, SRAM 512 Kbytes
c. 2 buah 8-bit timer/counters, 1 buah 16-bit timer/counters, 2 kanal 8-bit PWM, 2
kanal 16-bit PWM.
d. 8 kanal 10-bit ADC, 1 USART, watchdog timer, dan analog comparator. e. 32 jalur Input/Output.
f. Antar muka SPI untuk In-System Programming.
g. Dapat mencapai 16 MIPS (Millions of instruction per second) pada 16 MHz. h. Enam mode sleep : idle, ADC Noise, Power-save, Power-down, Standby dan
extended standby.
14
Sistem Kontrol Pergerakan Traktor
Sistem kontrol adalah suatu alat (kumpulan alat) yang digunakan untuk
mengendalikan, memerintah, dan mengatur keadaan dari seluruh sistem. Berdasarkan
umpan balik sinyal keluaran, secara umum sistem kontrol dibagi dua (Annas 2012):
1. Sistem lup terbuka adalah sistem kontrol yang keluarannya tidak berpengaruh
pada aksi pengontrolan, sehingga keluarannya tidak diukur atau diumpanbalikkan
untuk dibandingkan dengan masukan
Gambar 7 Sinyal lup terbuka (Annas 2012)
2. Sistem kontrol lup tertutup merupakan sistem kontrol yang sinyal keluarannya
mempunyai pengaruh langsung pada aksi pengontrolan. Sistem kontrol lup
tertutup adalah sinyal sistem kontrol berumpan balik, sehingga sinyal kesalahan
penggerak merupakan selisih antar sinyal masukan dan sinyal umpan-balik.
Gambar 8 Sinyal lup tertutup (Annas 2012)
Pada otomasi sistem kemudi traktor dimana umpan balik dipergunakan sebagai
parameter kondisi traktor, maka sistem kontrol yang umum digunakan adalah sistem
kontrol sinyal tertutup. De Luca et al. (1998) mengklasifikasikan pergerakan robot beroda dalam lingkungan bebas tanpa ada rintangan (obstacle) menjadi tiga jenis, yaitu : 1. Pergerakan titik ke titik (point –to – point motion), dimana robot harus bergerak
dari satu titik awal ke titik tujuan, tanpa perlu mengikuti lintasan yang jelas.
15
3. Pergerakan mengikuti lintasan tertentu (trajectory following). Pergerakan ini menyerupai path following, akan tetapi ada variable waktu, sehingga robot pergerak mengikuti lintasan yang telah ditentukan pada waktu yang tepat. Tipe ini
biasanya digunakan apabila satu robot beroda harus mengikuti pergerakan robot
lainnya secara beriringan.
Gambar 9 Tipe pergerakan robot beroda; (a) pergerakan titik ke titik, (b) mengikuti jalur
dan (c) mengikuti lintasan (De Luca et al 1998)
Junyusen (2005) menyatakan bahwa tipe pergerakan titik ke titik adalah tipe yang
paling sulit dikontrol dikarenakan kontrol berbasis input – state sehingga sistem harus mampu menciptakan jalur yang terbaik agar mampu menggerakkan traktor secara tepat
ke titik tujuan. Junyusen (2005) dan Ahamed (2006) mengembangkan traktor cerdas
dengan tipe pergerakan titik ke titik, dimana traktor diatur agar mampu bergerak menuju (a)
(b)
16
titik tertentu dari posisi awal traktor, sedangkan traktor cerdas yang dikembangkan oleh
Annas (2012) menggunakan tipe pergerakan pathfollowing. Tenaga Penggerak
Tenaga penggerak merupakan tenaga yang diperlukan untuk menggerakkan
lengan maupun komponen penggerak sehingga dapat melakukan fungsi sesuai tujuan
perancangannya. Ada beberapa jenis tenaga penggerak yang umum dikenal yaitu: motor
listrik dan motor hidrolik.
1. Tenaga penggerak listrik
Motor listrik merupakan tenaga penggerak yang memanfaatkan catu daya listrik
untuk menghasilkan gerakan. Berdasarkan catu dayanya, motor listrik dibagi
menjadi 2 jenis, yaitu : motor listrik DC dan motor listrik AC.
Motor DC adalah motor yang digerakkan menggunakan arus listrik DC.
Kecepatan putar motor DC dipengaruhi oleh nilai tegangan yang diberikan.
Makin rendah tegangan yang diberikan, maka kecepatan putarnya akan semakin
rendah. Demikian juga torsi yang dihasilkan akan semakin rendah. Polaritas
catu daya akan menetukan arah putaran motor.
Motor AC adalah motor yang digerakkan menggunakan tegangan/ arus listrik
bolak-balik (AC).
(a) (b)
17 2. Tenaga penggerak hidrolik
Tenaga penggerak hidrolik adalah sistem penggerak yang bekerja berdasarkan
minyak hidrolik bertekanan tinggi. Menurut Srivastava et al. (2006), sistem tenaga hidrolik terdiri dari : reservoir minyak, pompa hidrolik, katup kendali,
actuator dan filter yang berfungsi untuk membersihkan minyak dari
kontaminan.
Ada tiga kenis katup kendali, yaitu : katup pengendali tekanan, katup
pengendali laju aliran minyak dan katup pengendali arah aliran. Adapun
aktuator terdiri dari dua jenis aktuator, yaitu silinder hidrolik dan motor
hidrolik.
Silinder hidrolik merupakan aktuator yang digunakan agar gerakan yang
dihasilkan berupa gerakan translasi. Motor hidrolik merupakan aktuator yang
digunakan untuk menggerakan secara rotasi. Silinder hidrolik serta motor
hidrolik dapat dilihat pada Gambar 11.
(a) (b)
Gambar 11 Aktuator hidrolik ; (a) silinder hidrolik dan (b) motor hidrolik
Penggunaan motor hidrolik sebagai penggerak aktuator pada pengembangan
traktor cerdas telah dilakukan oleh Junyusen (2005), Ahamed (2006) dan Perez (2008),
sedangkan pada penelitian Annas (2012), sumber tenaga penggerak aktuator yang
18
III
TINJAUAN PUSTAKA
Waktu dan Tempat Penelitian
Penelitian dilaksanakan pada bulan Januari 2012 – November 2012 di
laboratorium lapangan Siswadi Supardjo, Program Studi Teknik Mesin Pertanian dan
Pangan, Fakultas Teknologi Pertanian, Institut Pertanian Bogor.
Alat dan Bahan
Alat-alat yang digunakan dalam penelitian ini meliputi:
1. Perangkat keras.
Perangkat keras (hardware) yang digunakan beserta gambar perangkat tersebut dapat dilihat pada Tabel 2.
Tabel 2 Perangkat keras yang digunakan
Nama Alat / Fungsi Gambar
Laptop /
Komputer pengendali
Mikrokontroller DT-AVR Low Cost
Micro System /
Pengendali unit aktuator
RTK-DGPS Outback® S3 GPS
Guidance and Mapping System /
Penentu posisi traktor
5 Motor DC /
19
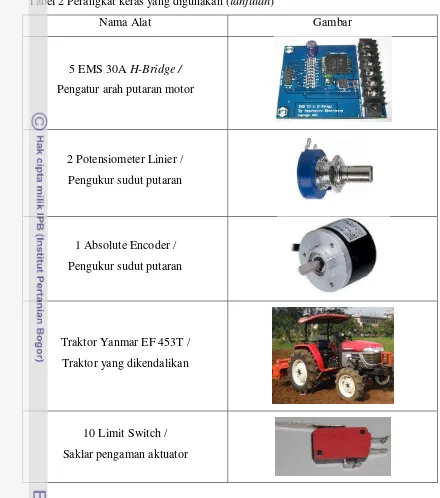
Tabel 2 Perangkat keras yang digunakan (lanjutan)
Nama Alat Gambar
5 EMS 30A H-Bridge /
Pengatur arah putaran motor
2 Potensiometer Linier /
Pengukur sudut putaran
1 Absolute Encoder /
Pengukur sudut putaran
Traktor Yanmar EF 453T /
Traktor yang dikendalikan
10 Limit Switch /
Saklar pengaman aktuator
2. Software
- Microsoft Visual Basic 6.0
- Code Vision AVR
Tahapan Penelitian
Secara umum, tahapan penelitian mengikuti kaidah umum rancang bangun.
20
Gambar 12 Bagan alir proses penelitian
Berdasarkan Gambar 12 di atas, tahapan-tahapan penelitian yang dilakukan terdiri
atas :
1. Identifikasi masalah. Pada tahap ini diidentifikasi masalah-masalah serta kebutuhan
yang diperlukan supaya sistem kemudi otomatis berbasis GPS dapat dilakukan.
Permasalahan tersebut meliputi: komponen-komponen traktor utama seperti stir,
kopling, rem, akselerator dan implemen harus mampu bergerak secara otomatis serta
diperlukan adanya panduan yang dapat memandu traktor agar dapat bergerak secara
otomatis. Berdasarkan permasalahan tersebut, maka dirumuskan beberapa alternatif
solusi yang mungkin.
2. Pada tahap pengukuran gaya awal, diukur masing-masing kebutuhan gaya yang
diperlukan untuk menggerakkan masing-masing mekanisme. Gaya yang dibutuhkan
untuk menggerakkan stir sebesar 14.7 N pada landasan beton, sedangkan untuk
menggerakkan akselerator dibutuhkan gaya sebesar 58.86 N. Gaya yang diperlukan
untuk menggerakkan tuas implemen sebesar 78.48 N, dan gaya yang dibutuhkan
untuk menggerakkan rem sebesar 78.48 N sedangkan gaya yang dibutuhkan untuk
21
3. Pada tahap perancangan sistem kemudi otomatis traktor, dirancang beberapa sistem
maupun mekanisme untuk mengatasi masalah yang telah diidentifikasi. Rancangan
fungsional serta struktural dapat dilihat pada Bab Pendekatan Rancangan.
4. Pembuatan sistem kemudi otomatis traktor meliputi mekatronika sistem kontrol stir,
akselerator, impelemen, rem dan kopling. Tahapan ini meliputi pembuatan sistem
mekanik serta pemrograman system pada mikrokontroller. Pemrograman dilakukan
dengan menggunakan bahasa pemrograman C. Pemilihan bahasa C didasarkan oleh
beberapa keunggulan yang dimiliki antara lain: bahasa C merupakan bahasa
pemrograman tingkat tinggi, yang memudahkan desainer dan merupakan bahasa
yang powerfull, fleksibel, dan portable sehingga dapat dijalankan pada beberapa sistem operasi yang berbeda (Joni & Raharjo 2006). Program yang ditulis dengan
menggunakan aplikasi Code Vision AVR, yang kemudian dicompile menjadi file yang dapat diunduh kedalam chip mikrokontroler.
Mekanisme yang telah dibangun kemudian dipasangkan pada traktor yang
digunakan. Adapun gambar lay out keseluruhan alat dapat dilihat pada Gambar 13.
Gambar 13 Layout alat Keterangan :
1. Antena radio GPS dengan Baseline
2. Modul kontrol, mekanisme pengendalian tuas implemen 3. Mekanisme pengendalian kopling, rem dan akselerator 4. Mekanisme pengendalian stir
22
5. Pengujian fungsional dilakukan untuk mengetahui kinerja mekanisme yang dibangun
berdasarkan fungsi yang diharapkan. Tahapan uji fungsional meliputi uji kalibrasi
serta validasi. Hasil uji fungsional akan menentukan layak-tidaknya sistem
mekatronika yang dibangun untuk diuji kinerjanya. Jika hasil uji fungsional
menunjukkan bahwa sistem mekatronika belum siap, maka penelitian akan kembali
pada tahap perancangan fungsional.
6. Pada tahap uji kinerja, sistem mekatronika yang dibangun akan diuji secara lengkap.
Traktor akan digerakkan berdasarkan lintasan yang diinginkan.
7. Pengolahan data hasil pengujian dilakukan pada tahap evaluasi untuk mengetahui
kinerja sistem kontrol yang telah dibuat, meliputi ketepatan pembacaan serta gerakan
traktor terhadap jalur yang diinginkan. Parameter yang digunakan adalah simpangan
maksimum serta simpangan rata-rata.
Prosedur Pengujian
1. Uji kalibrasi sistem kontrol mekatronika yang telah dibuat
Uji kalibrasi dilakukan untuk mengetahui nilai yang terbaca oleh sensor terhadap
kondisi perubahan sudut, baik sudut putar roda depan, maupun akselerator. Uji
kalibrasi dilakukan pada sistem kontrol mekatronika akselerator, stir dan implemen.
Pada sistem kontrol stir, kalibrasi dilakukan dengan membandingkan nilai yang
terbaca oleh absolute encoder dengan sudut yang dibentuk oleh roda depan. Berdasarkan data-data tersebut, dibangun sebuah persamaan yang menyatakan nilai
pembacaan absolute encoder terhadap sudut putaran roda depan.
Uji kalibrasi pada sistem kontrol tuas akselerator dilakukan dengan membandingkan
nilai hasil pembacaan ADC dari sensor potensiometer terhadap kecepatan putaran
(RPM) mesin. Berdasarkan nilai-nilai tersebut, dibangun persamaan yang
menunjukkan nilai ADC terhadap RPM mesin
Pada sistem kontrol tuas implemen, uji kalibrasi dilakukan dengan membandingkan
nilai hasil pembacaan ADC terhadap tinggi lower link implemen. Nilai-nilai tersebut kemudian dijadikan patokan untuk menentukan nilai ADC yang tepat pada setiap
23
2. Uji validasi sistem kontrol mekatronika yang telah dibuat
Uji validasi dilakukan untuk mengetahui nilai error yang dihasilkan dari sistem mekatronika yang telah dibuat. Pada sistem kontrol stir, sistem diset pada sudut putar
roda depan tertentu, kemudian diukur sudut putar roda depan yang terjadi dan
dihitung error yang dihasilkan. Pada sistem kontrol akselerator, sistem diperintahkan untuk berada pada persentase akselerasi tertentu kemudian diukur persentase
akselerasi yang terjadi dan dihitung error yang dihasilkan.
Pada sistem kontrol tuas implemen, sistem diperintahkan untuk bergerak menuju
posisi tuas tertentu, kemudian akan dilihat posisi yang dihasilkan oleh sistem.
3. Pengujian statis
Pada pengujian statis, traktor terlebih dahulu diangkat dengan menggunakan hidrolik
sehingga traktor berada dalam keadaan statis. Sistem kontrol dijalankan dengan
kondisi tertentu, kemudian diberi perlakuan dari luar terhadap roda penggerak, roda
bagian depan untuk melihat respon sistem dalam mengatasi perlakuan tersebut apakah
kembali bekerja sesuai dengan pengaturan awal. Pengujian yang dilakukan meliputi
uji konsistensi sistem dan uji respon sistem.
Pada uji konsistensi sistem kontrol stir, roda depan diset pada sudut putar tertentu (set point), kemudian dilakukan perubahan sudut putar dan dikembalikan ke sudut putar
set point dan diukur sudut yang terbentuk pada set point untuk mengetahui error
sudut yang terjadi akibat terjadi perubahan nilai sudut. Proses ini dilakukan
berulang-ulang sehingga diketahui kekonsistenan sistem kontrol yang dibuat. Pada uji
konsistensi sistem akselerator, sistem diset pada persentase akselerasi tertentu,
kemudian dilakukan perubahan persentase akselerasi dan dikembalikan pada set point
persentase akselerasi serta diukur persentase akselerasi yang terjadi untuk mengetahui
kekonsistenan sistem yang telah dibuat.
Pada uji respon sistem, sistem diset pada nilai tertentu baik sistem stir maupun
akselerasi selama periode tertentu, kemudian diset kembali pada nilai yang lain
selama periode tertentu dan dikembalikan ke set point awal. Hal ini dilakukan berulang-ulang dan diukur nilai sudut putar roda depan serta persentase akselerasi
yang terjadi pada setiap waktu untuk mengetahui apakah sistem sudah merespon
24
4. Pengujian kinerja sistem kontrol traktor pada operasi di lapangan
Pada pengujian ini, seluruh perangkat sistem telah terpasang pada traktor. Traktor
diprogram untuk mengikuti jalur lintasan yang telah ditentukan. Pada proses
pengujian, langkah pertama adalah menyalakan base-line GPS, agar koreksi RTK-DGPS dapat dilakukan. Tahapan selanjutnya adalah memasukkan titik-titik koordinat
GPS acuan kedalam sistem. Tahap selanjutnya adalah sistem melakukan koneksi ke
GPS, dan menunggu hingga kondisi GPS mencapai kondisi RTK-DGPS.
Pada kondisi RTK-DGPS telah terpenuhi, maka traktor dikendarai secara manual
hingga mencapai titik awal pengujian. Tahap selanjutnya adalah menghidupkan
rangkaian kontrol mikrokontroler sehingga mikrokontroler akan melakukan
pengaturan awal pada tiap-tiap aktuator yang dibangun. Pada tahap terakhir sistem
akan melakukan koneksi ke mikrokontroler dan proses pengujian pun dapat
dilakukan. Layout set-up pengujian dapat dilihat pada Gambar 14.
Gambar 14 layout set-up pengujian
Pengujian dilakukan pada tiga jenis lintasan, yaitu lintasan lurus, petakan dan terakhir
pengolahan tanah dengan menggunakan garu rotari.
I
Pengujian lintasan lurus.Pada lintasan lurus, panjang lintasan yang digunakan sebesar 30 m. pengujian ini
25
juga diberikan perlakuan simpangan awal untuk mengetahui respon sistem
terhadap simpangan yang diberikan. Parameter uji yang diukur adalah besarnya
simpangan yang terjadi terhadap lintasan yang seharusnya. Lintasan set-point
merupakan garis yang dibentuk oleh dua titik koordinat GPS.
II
Pengujian lintasan persegi panjangPengujian dengan bentuk lintasan persegi panjang dilakukan untuk mengetahui
besar sudut belok yang diperlukan serta kemampuan sistem dalam melakukan
maneuver belok. Pengujian dilakukan pada lahan berukuran 40 x 20 m. lintasan
set-point dibuat berdasarkan 4 titik pojok koordinat yang telah diukur sebelumnya dengan menggunakan GPS.
Parameter uji yang diukur adalah besarnya simpangan yang terjadi terhadap
lintasan set-point yang diinginkan, terutama simpangan yang terjadi akibat mekanisme belok. Traktor digerakkan dari posisi pojok kanan bawah bergerak
naik ke kanan atas, kemudian belok ke kiri bawah dan terakhir kembali ke titik
awal. Layout pengujian dapat dilihat pada Gambar 15(a).
III
Pengujian pengolahan tanah.Pada pengujian terakhir berupa pengolahan tanah, luas lahan yang digunakan
sama dengan pengujian petakan yaitu 40 x 20 m. Lebar kerja disesuaikan dengan
lebar kerja implemen garu yaitu 1.6 m. sehingga jumlah lintasan yang harus
dilalui sebanyak 13 lintasan. Penentuan masing-masing lintasan dilakukan dengan
menggunakan algoritma yang dikembangkan.
Pada pengujian ini implemen dikontrol agar bergerak turun pada jalur lurus
(panjang) dan implemen akan dinaikkan pada jalur belok. Jalur lintasan dibentuk
berdasarkan input 4 titik koordinat pojok lahan yang akan diolah. Titik-titik
tersebut merupakan nilai GPS yang telah dibaca pada kondisi RTK-DGPS.
Kecepatan putaran mesin (RPM) diatur pada 2200 rpm, dengan kombinasi
26
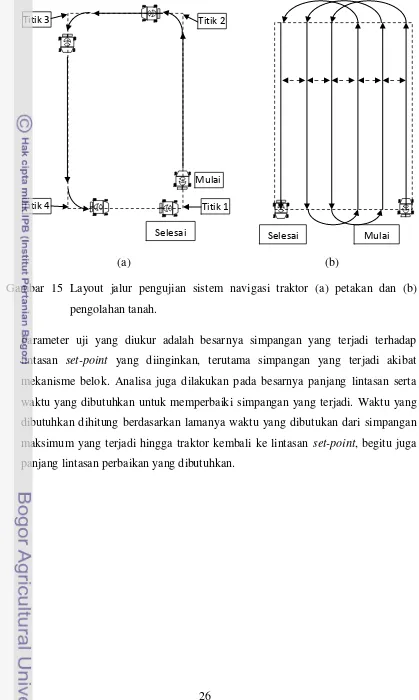
(a) (b)
Gambar 15 Layout jalur pengujian sistem navigasi traktor (a) petakan dan (b)
pengolahan tanah.
Parameter uji yang diukur adalah besarnya simpangan yang terjadi terhadap
lintasan set-point yang diinginkan, terutama simpangan yang terjadi akibat mekanisme belok. Analisa juga dilakukan pada besarnya panjang lintasan serta
waktu yang dibutuhkan untuk memperbaiki simpangan yang terjadi. Waktu yang
dibutuhkan dihitung berdasarkan lamanya waktu yang dibutukan dari simpangan
maksimum yang terjadi hingga traktor kembali ke lintasan set-point, begitu juga panjang lintasan perbaikan yang dibutuhkan.
Mulai Selesai
Mulai
Selesai
Titik 1 Titik 2 Titik 3
27
IV
PENDEKATAN RANCANGAN
Kriteria Perancangan
Pada prinsipnya suatu proses perancangan terdiri dari beberapa tahap atau proses
sehingga menghasilkan suatu desain atau prototype produk yang sesuai dengan
kebutuhan.
Perancangan sistem kemudi otomatis traktor pertaian pada penelitian ini
bertujuan untuk memandu traktor pertanian bergerak secara otomatis sesuai dengan
jalur set-point yang diinginkan. GPS digunakan untuk penentuan posisi traktor secara
real time.
Rancangan Fungsional
Pada rancangan fungsional, dilakukan perancangan berdasarkan aspek fungsional
dari masing-masing mekanisme yang dibuat. Sistem navigasi otomatis traktor pertanian
terdiri atas: unit pengontrol stir, unit pengontrol kopling, unit pengontrol pedal
akselerator, unit pengontrol pedal rem, unit pengontrol tuas implemen dan unit pembaca
serts pengolah data GPS.
1. Unit pengontrol stir
Unit pengontrol stir berfungsi untuk mengontrol stir agar berputar kanan-kiri
sesuai dengan yang diperintahkan dengan kecepatan putar yang dapat diatur.
Pengontrolan stir dilakukan agar traktor mampu bergerak sesuai dengan jalur
set-point yang diinginkan serta mampu memperbaiki simpangan yang terjadi. 2. Unit pengontrol kopling
Unit pengontrol kopling berfungsi untuk mengontrol pergerakan kopling agar
sesuai dengan yang diperintahkan dan kecepatan pergerakan yang dapat diatur.
Pengontrolan kopling dilakukan bertujuan agar traktor mampu bergerak dan
berhenti sesuai dengan yang diperintahkan.
3. Unit pengontrol pedal akselerator
Unit pengontrol pedal akselerator berfungsi untuk mengontrol persentase
28
yang dapat diatur. Pengontrolan pedal akselerator dilakukan agar traktor mampu
bergerak sesuai dengan kecepatan yang diinginkan.
4. Unit pengontrol rem
Unit pengontrol rem berfungsi untuk mengontrol pedal rem agar bergerak sesuai
dengan yang diperintahkan dengan kecepatan putar yang dapat diatur.
Pengontrolan rem dilakukan agar traktor mampu menurunkan kecepatan
majunya terutama pada kondisi-kondisi yang kritis.
5. Unit pengontrol tuas implemen
Unit pengontrol tuas implemen berfungsi untuk mengontrol tuas agar bergerak
ke posisi implemen yang diperintahkan dengan kecepatan putar yang dapat
diatur. Pengontrolan tuas implemen dilakuan bertujuan untuk mengontrol tinggi
lower link implemen sesuai dengan yang diinginkan. 6. Unit penerima dan pengolah data GPS
Unit penerima dan pengolah data GPS berfungsi untuk menerima data GPS dari
satelit, kemudian mengolahnya sehingga menjadi acuan bagi pergerakan traktor.
Berdasarkan data GPS, komputer pengendali akan memerintahkan unit-unit
aktuator agar bergerak sesuai dengan algoritma yang dibangun.
Analisis Teknik
Analisis teknik diperlukan pada proses perancangan untuk menentukan spesifikasi
yang dibutuhkan bagi masing-masing unit pengontrol. Pada tahap ini dilakukan
perhitungan kebutuhan daya masing-masing motor penggerak agar mekanisme dapat
bekerja sesuai dengan tujuannya. Ukuran mekanisme pun menjadi hal yang
diperhitungkan agar mekanisme dapat bergerak sesuai dengan yang diharapkan.
Analisis teknik dilakukan pada 5 mekanisme unit kontrol, yaitu : unit pengontrol stir,
unit pengontrol kopling, unit pengontrol akselerator, unit pengontrol rem serta unit
pengontrol tuas implemen.
1. Unit pengontrol roda stir
Pengukuran gaya awal untuk menggerakkan stir kemudi telah dilakukan pada
29
= 14.7 N dan jari-jari stir (r3)= 20 cm, maka torsi yang dibutuhkan untuk
memutar stir adalah :
Jika kecepatan putar roda stir (N2) maksimum yang diinginkan adalah sebesar
0.75 rps, dengan kecepatan putar motor DC penggerak (N1) sebesar 1.5 rps,
maka perbandingan jari-jari puli yang digunakan baik pada motor DC penggerak
(r1) maupun stir (r2) adalah sebagai berikut :
Jika puli yang digunakan pada poros motor DC berdiameter 7.5 cm maka puli
pada stir berdiameter 15 cm.
Gambar 16 Diagram benda bebas mekanisme pengontrol stir Motor
DC 12 V
T- Belt r1
ω1
r2
F
ω2
30
Torsi motor DC yang dibutuhkan adalah sebesar :
Daya motor DC yang dibutuhkan dengan asumsi effisiensi 70% adalah:
Nilai safety factor yang digunakan adalah sebesar 1.75, sehingga daya motor yang digunakan adalah sebesar :
Berdasarkan ketersediaan di pasaran, maka motor DC yang digunakan adalah
motor DC yang memiliki daya sebesar 36 watt.
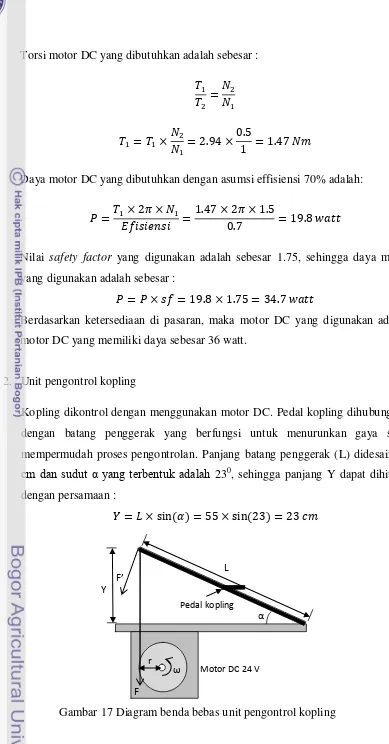
2. Unit pengontrol kopling
Kopling dikontrol dengan menggunakan motor DC. Pedal kopling dihubungkan
dengan batang penggerak yang berfungsi untuk menurunkan gaya serta
mempermudah proses pengontrolan. Panjang batang penggerak (L) didesain 55
cm dan sudut α yang terbentuk adalah 230, sehingga panjang Y dapat dihitung dengan persamaan :
sin sin
Gambar 17 Diagram benda bebas unit pengontrol kopling r
ω
L
Y
α
F
Motor DC 24 V Pedal kopling
31
Pada perancangan, waktu yang dibutuhkan untuk menggerakkan kopling dari
kondisi kosong menjadi terinjak sepenuhnya didesain 1.64 detik, dan kecepatan
putar motor (N) sebesar 0.6 rps, sehingga jari-jari r dapat dihitung dengan
menggunakan persamaan :
Berdasarkan hasil pengukuran awal, gaya yang dibutuhkan untuk menarik
batang kopling (F’) sebesar 13 kgf =127.4 N, sehingga torsi yang dibutuhkan pada motor DC penggerak adalah sebesar :
s s
Dan daya motor yang digunakan dengan effisiensi motor 70% adalah sebesar :
Nilai safety factor yang digunakan adalah 2, sehingga daya motor yang digunakan adalah sebesar :
Hal yang perlu diperhatikan pada rancangan ini adalah besarnya gaya yang
ditimbulkan oleh pegas agar kopling kembali pada posisi kosong (terangkat).
Sehingga perlu adanya mekanisme yang mampu menahan kembalinya pedal
kopling ketika proses penurunan pedal kopling terjadi, dalam hal ini digunakan
gearbox berupa worm gear, sehingga kopling akan tetap berada pada posisi
meskipun motor DC sudah tidak dialiri arus. Berdasarkan hal tersebut, maka
motor DC yang memenuhi syarat tersebut adalah motor DC yang telah
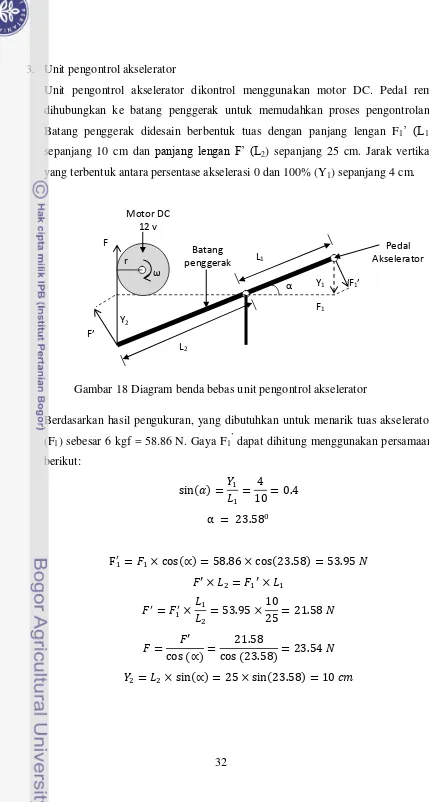
32 3. Unit pengontrol akselerator
Unit pengontrol akselerator dikontrol menggunakan motor DC. Pedal rem
dihubungkan ke batang penggerak untuk memudahkan proses pengontrolan.
Batang penggerak didesain berbentuk tuas dengan panjang lengan F1’ (L1)
sepanjang 10 cm dan panjang lengan F’ (L2) sepanjang 25 cm. Jarak vertikal
yang terbentuk antara persentase akselerasi 0 dan 100% (Y1) sepanjang 4 cm.
Gambar 18 Diagram benda bebas unit pengontrol akselerator
Berdasarkan hasil pengukuran, yang dibutuhkan untuk menarik tuas akselerator
(F1) sebesar 6 kgf = 58.86 N. Gaya F1’ dapat dihitung menggunakan persamaan
33
Pada perancangan, waktu yang dibutuhkan untuk menggerakkan tuas akselerator
dari persentase 0% menjadi 100% kondisi kosong menjadi terinjak sepenuhnya
didesain 1 detik, dan kecepatan putar motor sebesar 0.4 rps sehingga jari-jari r
dapat dihitung dengan menggunakan persamaan :
Torsi yang terjadi pada motor DC penggerak adalah sebesar :
Dan daya motor yang digunakan dengan effisiensi 70% adalah sebesar :
Nilai safety factor yang digunakan adalah 2, sehingga daya motor yang dibutuhkan adalah sebesar :
Berdasarkan ketersediaan di pasaran, motor yang digunakan adalah motor
dengan daya 30 watt.
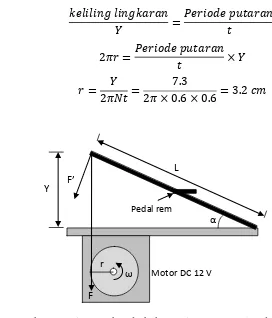
4. Unit pengontrol pedal rem
Pedal rem dikontrol dengan menggunakan motor DC dengan bantuan batang
penggerak yang dihubungkan ke pedal rem. Rem yang dikontrol merupakan
penggabungan rem kanan dan rem kiri. Panjang lengan L didesain 38 cm dan
sudut α yang terbentuk adalah 110, sehingga panjang Y dapat dihitung dengan persamaan :
sin sin
Pada perancangan, waktu yang dibutuhkan untuk menggerakkan pedal rem dari
kondisi kosong menjadi terinjak sepenuhnya didesain 0.6 detik, dan kecepatan
putar motor sebesar 0.6 rps, sehingga jari-jari r dapat dihitung dengan
34
Gambar 19 Diagram benda bebas unit pengontrol pedal rem
Berdasarkan hasil pengukuran, gaya yang dibutuhkan untuk menarik pedal rem
adalah sebesar 8 kgf = 78.48 N, maka torsi yang dibutuhkan pada motor DC
penggerak dihitung berdasarkan persamaan:
s s
Dan daya motor yang digunakan dengan effisiensi motor 70% adalah sebesar :
Nilai safety factor yang digunakanadalah 2, sehingga besarnya daya motor yang dbutuhkan dihitung menggunakan persamaan :
Berdasarkan nilai daya yang didapat dan mempertimbangkan ketersediaan di
pasaran, maka motor yang dipilih adalah motor berdaya 30 watt. r
ω
L
Y
α
F
Motor DC 12 V Pedal rem
35 5. Unit pengontrol tuas implemen
Tuas implemen digerakkan dengan menggunakan motor DC melalui mekanisme
sprocket dan rantai. Berdasarkan pengukuran awal, maka jarak lintasan tuas
implemen dari posisi 0-9 adalah 30 cm. jika motor yang digunakan memiliki
kecepatan putar 1 rps, dan waktu yang diinginkan adalah 2 detik, maka jari-jari
sprocket yang dibutuhkan dihitung menggunakan persamaan :
Gambar 20 Diagram benda bebas unit pengontrol tuas implemen
Gaya untuk menarik tuas implemen adalah sebesar 8 kgf=78.48 N, maka torsi
yang dibutuhkan pada motor DC penggerak dihitung berdasarkan persamaan:
Dan daya motor yang digunakan dengan effisiensi motor 70% adalah sebesar :
Nilai safety factor yang digunakan adalah 2, sehingga daya motor yang dibutuhkan dihitung menggunakan persamaan :
Berdasarkan nilai daya yang didapat dan membandingkan ketersediaan di
pasaran, maka motor yang digunakan adalah motor DC dengan daya 30 watt. Y
Motor DC
Tuas implemen
Y F
36
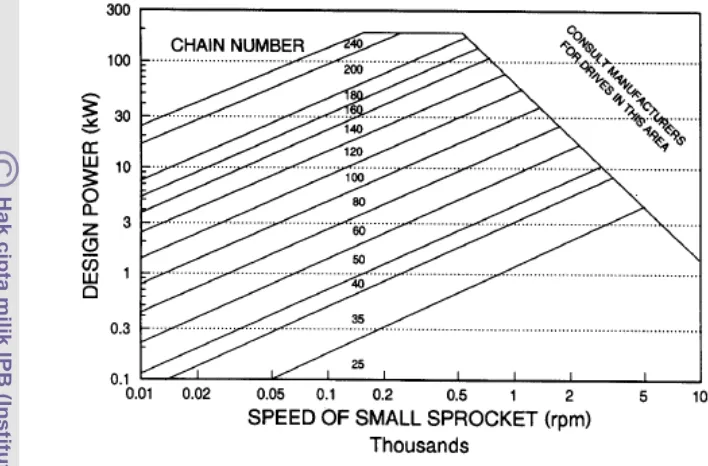
Perhitungan ukuran rantai yang digunakan, dihitung menggunakan grafik yang
dapat dilihat pada Gambar 21.
Gambar 21 Grafik pemilihan ukuran rantai (Srivastava et al, 2006)
Berdasarkan grafik, maka rantai yang digunakan adalah rantai dengan no. 25,
yang memiliki spesifikasi jarak bagi 6.35 mm, rol rantai dengan diameter 3.3
mm dan lebar 3.18 mm, plat mata rantai dengan tebal 0.76, diameter pena 2.3
mm.
Rancangan Struktural
Dalam perancangan, pemilihan bentuk dan penentuan ukuran yang digunakan
merupakan proses yang sangat penting. Rancangan struktural dari mekanisme unit
pengontrol dirancang sedemikian rupa sehingga sesuai untuk dirangkaikan pada traktor
roda 4 dalam hal ini traktor Yanmar EF453T. Mekanisme unit pengontrol juga
dirancang agar tidak mengganggu pengoperasian unit-unit yang dikontrol bila
dioperasikan secar manual.
1. Unit pengontrol stir
Unit pengontrol stir dirancang agar mampu menggerakkan stir layaknya
dikendalikan oleh pengemudi. Mekanisme pengontrol stir dilakukan dengan