RANCANG BANGUN PENGATURAN PAKAN PADA
MODEL TAMBAK SECARA OTOMATIS BERBASIS
MIKROKONTROLLER ATMEGA 32
(Prototype)
Oleh:
SINGGIH ANDRIYAWAN
Skripsi
Sebagai Salah Satu Syarat Untuk Mencapai Gelar SARJANA TEKNIK
Pada
Jurusan Teknik Elektro
Fakultas Teknik Universitas Lampung
FAKULTAS TEKNIK
UNIVERSITAS LAMPUNG
ABSTRAK
RANCANG BANGUN PENGATURAN PAKAN PADA MODEL TAMBAK SECARA OTOMATIS BERBASIS MIKROKONTROLLER ATMEGA32
Oleh
SINGGIH ANDRIYAWAN
Dalam penelitian tugas akhir ini dirancang sebuah alat pemberian pakan yang dapat bekerja secara otomatis berbasis mikrokontroller ATmega32 yang nantinya diharapkan dapat meringankan pekerjaan manusia khususnya bagi pemilik tambak atau petani budidaya ikan yang dapat menghemat waktu dalam pengerjaannya. Rancang bangun alat pemberian pakan secara otomatis ini menggunakan mikrokontroller ATmega32 sebagai pengendali utamanya yang berfungsi untuk mengatur beberapa komponen yang terdapat pada alat ini seperti rangkaian
switching dan penampil LCD. Selain itu mikrokontroller ATmega32 juga berfungsi membaca nilai ADC yang diberikan oleh sensor tahanan geser. Rangkaian switching digunakan sebagai pemicu untuk menjalankan motor AC dan motor DC sedangkan LCD digunakan untuk menampilkan pembacaan nilai ADC pada sensor.
Kata Kunci : Pemberian pakan otomatis, Mikrokontroller ATmega32, Rangkaian
ABSTRACT
A DESIGNOF A FEEDREGULATOR ON A FISPOND MODEL BASED ON MICROCONTROLLER AUTOMATICALLY ATmega32
By
SINGGIH ANDRIYAWAN
In this final study is designed a feeding device that can work automatically based on a microcontroller ATmega32 which might be expected to relieve the man's work, especially for the owners of the fish pondoran aquaculture farmers can save time on its process.
A design of an automatic feeding device is using a microcontroller ATmega32 as the main controller which functions to regulate some of the components found in devices such as a switching series and a LCD viewer. In addition, ATmega32 microcontroller reads the ADC value. It is provided by the sensors hearing resistance. A switching series are used as a trigger to run an AC motors and a DC motors while the LCD is used to display ADC value on the sensor readings.
DAFTAR GAMBAR
Gambar Halaman
1 Rangkaian kalang terbuka (open loop) ... 7
2 Rangkaian kalang tertutup (close loop) ... 8
3 Blok Diagram Fungsional ATMega32 ... 10
4 Konfigurasi pin ATMega32 ... 12
5 Memori Data AVR ATMega32 ... 13
6 LCD 2×16 Karakter ... 16
7 Motor Fase Sebelah ... 17
8 Rangkaian Motor Fase Sebelah ... 18
9 Konstruksi Motor DC ... 20
10 Konfigurasi Pin DS1307 ... 21
11 Typical Operating Circuit ... 22
12 Peta Data Memori DS1307 ... 22
16 Gelang Warna Resistor ... 27
18 Trimport ... 28
19 Potensiometer ... 29
20 Simbol dan Penampang LDR, NTC dan PTC. ... 30
21 Schematic Transistor ... 31
22 Schematic dan Konstruksi Dioda... 33
23 Diagram Alir Pengerjaan Tugas Akhir ... 36
24 Blok Diagram pengendali bintang-segitiga ... 37
25 Blok Pengatur Pakan... 37
26 Rancangan Yang Akan Dibuat ... 40
27 Rangkaian Power Supply Yang Telah Distabilkan ... 42
28 Rangkaian Sensor Berat ... 42
29 Rangkaian RTC DS1307 ... 44
30 Rangkaian Mikrokontroller dengan Pin Input dan Output ... 45
31 Rangkaian Pemicu Motor Listrik... 46
32 Rangkaian H-Bridge l298 ... 47
33 Rangkaian LCD ke Mikrokontroller ... 48
34 Skematik Hardware Secara Keseluruhan... 50
35 Fisik Hardware Elektrik ... 51
36 Fisik Rangkaian RTC DS1307 ... 52
37 Fisik Rangkaian Driver Motor L298 ... 53
39 Fisik Tombol Pengatur Pakan ... 56
40 Pintu Pada Timbangan ... 58
41 Rangkaian Resistor Variabel ... 58
DAFTAR TABEL
Tabel Halaman
1 Pengaturan Tombol Pakan ... 57
2 Hasil Pengukuran Resistor Variabel ... 59
3 Waktu Pengosongan Tangki Timbangan ... 61
4 Tabel Hasil Pengukuran ... 63
LAMPIRAN
Lampiran A : Source Code Program
Lampiran B : Foto-Foto Alat
I. PENDAHULUAN
A. Latar Belakang
Budidaya udang adalah kegiatan atau usaha memelihara udang di tambak selama
periode tertentu, serta memanennya dengan tujuan memperoleh keuntungan.
Dengan batasan tersebut, maka keberhasilan kegiatan budidaya udang di tambak
sangat dipengaruhi oleh ketepatan teknologi budidaya yang digunakan serta
kelayakan lingkungan dimana tambak itu berada.
Pada umumnya proses pemberian pakan pada kolam atau tambak masih terbilang
sangat sederhana atau masih dilakukan sendiri oleh manusia. Setiap hari petugas
pemberi pakan harus berkeliling kolam atau tambak dengan berjalan kaki dengan
menebarkan pakan di sepanjang kolam atau tambak. Cara seperti ini dilakukan
empat kali sehari pada jam-jam tertentu dengan jumlah pakan yang lumayan
banyak. Pemberian pakan sangat berpengaruh untuk pertumbuhan bibit udang
yang masih dalam usia muda pasca tebar benih atau benur. Untuk itu petugas
pemberi pakan harus selalu tepat waktu dalam pemberian pakan dan takaran
pakan disesuaikan dengan umur udang tersebut, supaya kegagalan panen karena
2
Seiring dengan kemajuan zaman khususnya di bidang elektronika yang saat ini
semakin canggih, maka pembuatan alat pada tugas akhir ini yang dilandasi oleh
pemberian pakan secara manual dapat dilakukan atau dikerjakan secara otomatis
yang nantinya akan dikendalikan oleh peralatan elektronika yang dapat bekerja
secara terprogram sesuai dengan kebutuhan. Sebuah contoh alat pengendali atau
mikrokontroler dari keluarga AVR yakni ATMega32 yang sudah banyak dijumpai
pada dunia elektronika atau pemrograman mikrokontroler karena pemrograman
dan pengoprasian dari ATMega sendiri dapat dikerjakan dengan mudah.
Untuk mempermudah proses pemberian pakan pada kolam atau tambak maka
penulis akan mencoba membuat suatu alat yang bekerja secara otomatis tanpa ada
petugas yang biasa_nya berkeliling kolam atau tambak untuk berjalan kaki yang
secara bersamaan menebarkan pakan di sepanjang kolam atau tambak. Dengan
demikian maka pekerjaan petugas yang biasanya berkeliling memberi pakan tidak
perlu lagi berjalan kaki berkeliling kolam atau tambak, petugas hanya perlu
mengontrol pakan pada tangki penampungan pakan. Pekerjaan menjadi lebih
cepat, tidak perlu khawatir akan keterlambatan pakan karena semua sudah serba
otomatis dengan dikendalikan oleh sebuah chip.
B. Tujuan Penelitian
Adapun tujuan dari penelitian ini adalah sebagai berikut:
1. Mempermudah pekerjaan dalam pemberian pakan pada pemilik kolam atau
2. Merancang dan membuat alat pemberian pakan yang bekerja secara otomatis
Manfaat yang diharapkan dapat tercapai dalam penelitian ini adalah sebagai
berikut:
1. Pekerjaan memberi pakan yang biasanya dilakukan oleh petugas kini dapat
dilakukan dengan bantuan peralatan yang dikontrol dengan mikrokontroler
ATMega32.
2. Petugas yang biasa_nya memberi pakan tidak perlu lagi keliling menyebarkan
pakan baik pada saat kondisi cuaca panas ataupun hujan.
3. Dapat menghindari resiko kecelakaan kerja.
4. Ketepatan waktu pada saat pemberian pakan.
D. Perumusan masalah
Permasalahan yang sering terjadi adalah keterlambatan pada pemberian pakan
yang tidak tepat waktu. Dikarenakan letak dan kondisi kolam atau tambak pada
4
dengan medan atau areal yang licin, oleh sebab itu pertumbuhan udang atau yang
biasa disebut dengan benur tidak dapat berkembang biak dengan baik.
E. Batasan masalah
Beberapa hal yang membatasi masalah dalam pembahasan tugas akhir ini adalah :
1. Tidak menganalisis perkembangan udang.
2. Menggunakan motor listrik AC satu fasa dan motor DC.
3. Menggunakan ATMega32 sebagai pengendali utama.
4. Tidak membahas proteksi motor penebar pakan dan motor kincir.
5. Tidak membahas mekanik dari peralatan.
F. Hipotesis awal
Pekerjaan menebar pakan secara manual, membutuhkan waktu yang relatif lama.
Selain itu berat takaran pakan sulit dikontrol, dan menyebabkan terjadinya
pemborosan pada pakan. Perlu dirancang suatu sistem pemberian pakan secara
G. Sistematika penulisan
Sistematika penulisan penelitian ini terdiri dari beberapa bab, yaitu:
BAB I : PENDAHULUAN
Bab ini menguraikan tentang latar belakang, tujuan, manfaat, rumusan masalah,
batasan masalah, hipotesis, dan sistematika penulisan.
BAB II : TINJAUAN PUSTAKA
Berisi tentang studi literature tentang motor induksi tiga fasa dan satu fasa, sensor
berat, sistem mikrokontroller, dan beberapa penjelasan tentang komponen
elektronika.
BAB III : METODE PENELITIAN
Memuat langkah-langkah yang dilakukan pada penelitian, diantaranya waktu dan
tempat penelitian, alat dan bahan, komponen dan perangkat penelitian, prosedur
kerja, perancangan, dan pengujian sistem.
BAB IV : HASIL DAN PEMBAHASAN
Bagian ini berisi mengenai hasil pengujian dan membahas terhadap data-data hasil
pengujian yang diperoleh.
BAB V : SIMPULAN DAN SARAN
Bab ini akan menyimpulkan semua kegiatan dan hasil-hasil yang diperoleh selama
proses pembuatan dan pengujian sistem serta saran-saran yang sekiranya
diperlukan untuk menyempurnakan peneltian berikutnya.
DAFTAR PUSTAKA
II. TINJAUAN PUSTAKA
A. Pengertian Tambak
Tambak dalam perikanan adalah kolam buatan, biasanya terdapat di daerah pantai
yang diisi air dan dimanfaatkan sebagai sarana budidaya perairan (akuakultur).
Hewan yang dibudidayakan adalah hewan air, terutama ikan, udang, serta kerang.
Penyebutan “tambak” ini biasanya dihubungkan dengan air payau atau air laut.
Kolam yang berisi air tawar biasanya disebut kolam saja atau empang. Tambak
merupakan salah satu jenis habitat yang dipergunakan sebagai tempat untuk
kegiatan budidaya air payau yang berlokasi di daerah pesisir. Secara umum
tambak biasanya dikaitkan langsung dengan pemeliharaan udang windu,
walaupun sebenarnya masih banyak spesies yang dapat dibudidayakan di tambak
misalnya ikan bandeng, ikan nila, ikan kerapu, kakap putih dan sebagainya. Tetapi
tambak lebih dominan digunakan untuk kegiatan budidaya udang windu. Udang
windu (Penaeus monodon) merupakan produk perikanan yang memiliki nilai
B. Dasar Sistem Kontrol
Sistem kontrol atau sistem kendali merupakan suatu sistem yang keluarannya atau
outputnya dikendalikan pada suatu nilai tertentu atau untuk merubah beberapa
ketentuan yang telah ditetapkan dari masukan atau inputan ke sistem. Untuk
merancang suatu sistem yang dapat merespon perubahan tegangan dan
mengeksekusi perintah berdasarkan situasi yang terjadi, maka diperlukan
pemahaman tentang sistem kendali (controll system). Sistem kendali merupakan
suatu kondisi dimana sebuah perangkat (device) dapat di kontrol sesuai dengan
perubahan situasi. (Sulistiyanti, Sri Ratna., Setyawan, FX Arinto. 2006. Dasar
Sistem Kendali ELT 307. Universitas Lampung. Lampung)
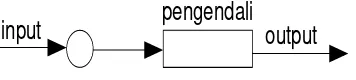
1. Sistem kendali kalang terbuka (open loop).
Loop terbuka atau open loop merupakan sebuah sistem yang tidak dapat merubah
dirinya sendiri terhadap perubahan situasi yang ada. Hal ini disebabkan karena
tidak adanya umpanbalik (feedback) pada sebuah sistem kalang terbuka. Sistem
ini masih membutuhkan campur tangan manusia yang bekerja sebagai operator.
Dapat dilihat pada blok diagram dari sebuah sistem kalang terbuka, sebagai
berikut:
input pengendali output
Gambar 2.1. Rangkaian Kalang Terbuka
8
Pada sistem kalang terbuka inputan dikendalikan oleh manusia sebagai operator,
dan perubahan kondisi lingkungan tidak akan langsung direspon oleh sistem,
melainkan dikontrol oleh manusia.
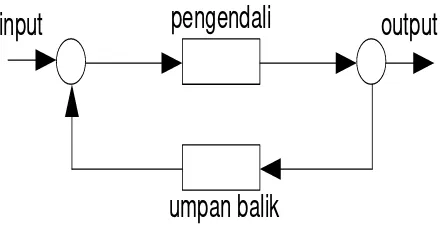
2. Sistem kendali kalang tertutup (close loop).
Loop tertutup merupakan sebuah sistem kontrol yang sinyal atau nilai keluarannya
memiliki pengaruh langsung terhadap aksi pengendali yang dilakukan. Pada
rangkaian loop tertutup sinyal error yang merupakan selisih antara sinyal
masukan dan sinyal umpanbalik (feedback), lalu diumpankan pada komponen
pengendali (controller), umpan balik ini dilakukan untuk memperkecil kesalahan
nilai keluaran (output) sistem semakin mendekati nilai yang diinginkan.
input
pengendali
umpan balik
output
Gambar 2.2. Rangkaian Kalang Tertutup
(http://thathit.wordpress.com/2010/02/26/pengukuran-dan-pengendalian)
Keuntungan dari rangkaian sistem loop tertutup ini adalah adanya pemanfaatan
nilai umpanbalik yang dapat membuat respon sistem kurang peka terhadap
kerugiannya adalah tidak dapat mengambil aksi perbaikan terhadap suatu
gangguan sebelum gangguan tersebut mempengaruhi nilai prosesnya.
C. ATMega32
Mikrokontroler adalah suatu keping IC dimana terdapat mikroprosesor dan
memori program (ROM) serta memori serbaguna (RAM), bahkan ada beberapa
jenis mikrokontroler yang memiliki fasilitas ADC, PPL, EEPROM dalam suatu
kemasan. Penggunaan mikrokontroler dalam bidang kontrol sangat luas dan
popular. Ada beberapa vendor yang membuat mikrokontroler diantaranya Intel,
Microchip, Winbond, Atmel, Philips, Xemics dan lain-lain buatan Atmel.
Mikrokontroler ATMega32 merupakan generasi AVR (Alf and Vegard’s Risk processor). Mikrokontroler AVR memiliki arsitektur RISC (Reduced Instruction
Set Computing) 32 bit, dimana semua instruksi dalam kode 16-bit (16-bit word)
dan sebagian besar instruksi dieksekusi dalam 1 (satu) siklus clock.
Mikrokontroler AVR didesain menggunakan arsitektur Harvard, di mana ruang
dan jalur bus bagi memori program dipisahkan dengan memori data.
Mikrokontroler ini memiliki berbagai macam fitur dan tidak terlalu sulit dalam
pemrogramannya karena didukung dengan software program yang sederhana.
Dalam pemrogramannya mikrokontroler ATMega32 ini menggunakan 2 bahasa
program yakni, dengan bahasa C dan bahasa assembly. Dalam penelitian ini
pemrograman mikrokontroler ini menggunakan bahasa C, yang menurut penulis
10
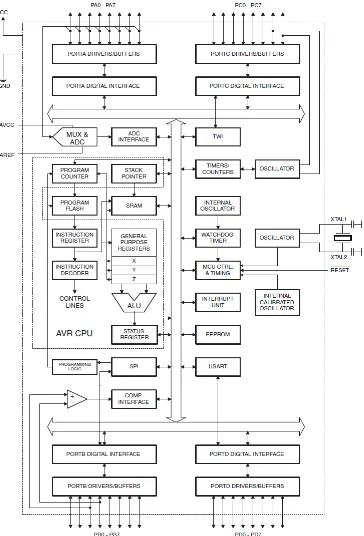
1. Arsitektur Mikrokontroller ATMega32
Gambar 2.3. Blok Diagram Fungsional ATMega32
Keterangan Gambar 2.3 diatas memperlihatkan bahwa ATMega32 memiliki
bagian sebagai berikut:
a. Saluran I/O sebanyak 32 buah, yaitu PortA, Port B, Port C, dan Port D.
b. ADC 10 bit sebanyak 8 saluran.
c. Tiga buah Timer/Counter dengan kemampuan pembanding.
d. CPU yang terdiri atas 32 buah register.
e. Watchdog Timer dengan osilator internal.
f. SRAM sebesar 512 byte.
g. Memori Flash sebesar 8 Kb dengan kemampuan Read While Write.
h. Unit interupsi internal dan eksternal.
i. Port antarmuka SPI.
j. EEPROM (Electrically Ersable Programmable Read Only Memori)
sebesar 512 byte yang diprogram saat operasi.
k. Antarmuka komparator analog.
l. Port USART untuk komunikasi serial dengan kecepatan maksimal 12,5
Mbps.
m. Sistem mikroprosesor 8 bit berbasis RISC dengan kecepatan maksimal 16
12
2. Konfigurasi Pin ATMega32
Konfigurasi dari mikrokontroler ATMega32 yaitu :
Gambar 2.4. Konfigurasi Pin ATMega32
(id.scribd.com/doc/49391154/26/Mikrokontroler-AVR-ATMega32)
Secara fungsional konfigurasi pin ATMega32 sebagai berikut:
a) VCC merupakan Pin yang berfungsi sebagai pin masukan catu daya
b) GND merupakan PinGround
c) Port A (PA0...PA7) merupakan pin I/O dan pin masukan ADC
d) Port B (PB0...PB7) merupakan pin I/O dua arah dan pin yang mempunyai
fungsi khusus yaitu Timer/Counter, komparator analog dan SPI
e) Port C (PC0...PC7) merupakan port I/O dua arah dan pin yang mempunyai
fungsi khusus, yaitu komparator analog dan Timer Oscillator
f) Port D (PD0...PD7) merupakan port I/O dua arah dan pin fungsi khusus
yaitu komparator analog dan interrupt eksternal serta komunikasi serial
g) RESET merupakan pin yang digunakan untuk mengembalikan kondisi
h) XTAL1 dan XTAL2pin untuk eksternal clock
i) AVCC adalah pin masukan untuk tegangan ADC
j) AREF adalah pin masukan untuk tegangan referensi eksternal ADC
3. Peta Memori
Mikrokontroler ATMega32 memiliki ruang pengalamatan memori data dan
memori program yang terpisah. Memori data terbagi menjadi 3 bagian yaitu: 32
buah register umum, 64 buah register I/O, dan 512 byte SRAMinternal. Register
untuk keperluan umum menempati ruang data pada alamat terbawah yaitu $00
sampai $1F. Sementara itu register khusus untuk menangani I/O dan kontrol
terhadap mikrokontroler menempati 64 alamat berikutnya, yaitu mulai dari $20
sampai $5F. Register tersebut merupakan register yang khusus digunakan untuk
mengatur fungsi terhadap berbagai peripheral mikrokontroler, seperti kontrol
register, timer/counter, fungsi fungsi I/O, dan sebagainya. Alamat memori
berikutnya digunakan untuk SRAM 512 byte, yaitu pada lokasi $60 sampai dengan
$25F.
Gambar 2.5. Memori Data AVR ATMega32
14
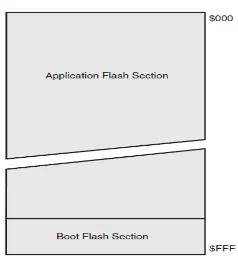
Memori program yang terletak pada Flash Perom tersusun dalam word atau 2
byte karena setiap instruksi memiliki lebar 16-bit atau 32-bit. AVR ATMega32
memiliki 4 KByte x 16 Bit Flash Perom dengan alamat mulai dari $000 sampai
$FFF. AVR tersebut memiliki 12 bit Program Counter (PC) sehingga mampu
mengalamati isi Flash. Selain itu AVR ATMega32 juga memilki memori data
berupa EEPROM 32 bit sebanyak 512 byte. Alamat EEPROM dimulai dari $000
sampai $1FF.
4. Fitur-fitur dari ATMega32 yang dipakai dalam pembuatan alat antara
lain:
a. ADC ( Analog to digital converter )
Fitur yang terdapat pada mikrokontroller ATMega32 ini berfungsi sebagai
pengkonversi nilai analog ke digital, karena nilai masukan atau keluaran pada
ATMega32 menggunakan logika input-output digital yakni 1/0 (high / low).
Penggunaan ADC ini dikarenakan sensor yang dugunakan pada pembacaan
konversi tegangan dari nilai 0-5 Volt, sedangkan ATMega32 tidak dapat
membaca nilai sensor tegangan yang bernilai 1,5 atau 3,5 Volt. Dengan
menggunakan fitur ADC nilai pembacaan sensor tersebut dapat dibaca oleh
ATMega32 karena fitur ADC mempunyai resolusi pembacaan dari 0-1024. Untuk
pembacaan nilai sensor yang berada di tengah-tengah antara 0-5 Volt dapat
Nilai konversi = Vcc x 1024 (2.1) Vref
Dimana :
Nilai konversi = nilai yang telah terkonversi dalam bentuk resolusi ADC
Vcc = nilai tegangan dari sensor
Vref = nilai tegangan referensi pada ATmega (5 volt)
1024 = nilai resolusi 10 bit ADC ATMega32
Dari persamaan diatas dapat diumpamakan nilai yang terbaca dari sensor adalah
2,5 volt, maka agar Atmega dapat membaca nilai sensor tersebut dapat
dikonversikan dari persamaan diatas
(2.2)
Nilai hasil dari konversi tersebut kemudian dimasukkan pada bahasa program
(software). Dari pembacaan konversi nilai sensor diatas pin-pin output yang telah
ditentukan bekerja sesuai dengan kode program yang ditulis pada software dan
seterusnya pada saat perubahan nilai sensor yang terbaca oleh chanel ADC.
(Heryanto, A dan Adi, W.P. 1991. Pemroggraman Bahasa C Mikrokontroller
16
b. Interupsi
Interupsi adalah suatu kondisi dimana microchip akan berhenti sementara dari
program utama untuk melayani atau menjalankan kode interupsi yang ditulis pada
kode program interupsi, kemudian microchip akan menjalankan program utama.
ATMega32 menyediakan 3 interupsi eksternal, yaitu INT0, INT1 dan INT2.
Interupsi ini dapat dilakukan dengan cara memberikan input low (0) pada pin yang
dipasang sebagai pin interupsi. Fitur interupsi ini diaplikasikan untuk motor listrik
penggerak kincir dan pemberian pakan, karena kedua motor tersebut bekerja tidak
secara bersamaan dan dilakukan pada waktu-waktu tertentu saja.
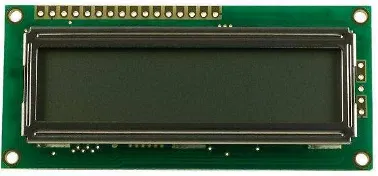
c. LCD (Liquid Crystal Display)
LCD merupakan suatu jenis penampil (display) yang menggunakan Liquid Crystal
sebagai media refleksinya. LCD juga sering digunakan dalam perancangan alat
yang menggunakan mikrokontroler. LCD dapat berfungsi untuk menampilkan
suatu nilai hasil sensor, menampilkan teks, atau menampilkan menu pada aplikasi
mikrokontroler. Tergantung dengan perintah yang ditulis pada mikrokontroller.
Gambar 2.6.LCD 2 x 16 Karakter
LCD yang akan digunakan dalam pembuatan alat pengaturan pakan pada tambak
atau kolam ini adalah LCD dengan tipe karakter 2 x 16 yaitu alat penampil yang
dibuat pabrikan umum dijual dipasaran standar dan dapat menampilkan karakter 2
baris dengan tiap baris 16 karakter. Pada pembuatan alat ini LCD digunakan
sebagai penampil jam dan berat pakan apabila tombol push button ditekan. Oleh
sebab itu harus di atur terlebih dahulu antara sensor berat dengan tombol-tombol
push button kemudian dikonversi oleh ADC pada mikrokontroller.
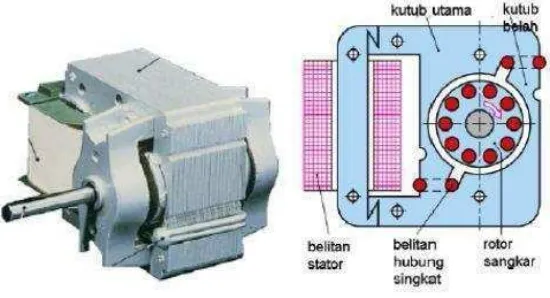
D. Motor Split Phase (Motor Fase Sebelah)
Motor fase belah terdiri atas dua kumparan stator yaitu kumparan utama dan
kumparan bantu. Antara kumparan utama dan kumparan bantu berbeda arus 90°
listrik. Dibawah ini adalah gambar dari motor fase sebelah :
Gambar 2.7. Motor Fase Sebelah
18
Motor split-tahap ini juga dikenal sebagai induksi start/ jalankan motor induksi.
Motor ini memiliki dua buah gulungan memulai dan berliku utama. Awal berliku
dibuat dengan lebih kecil kabel mengukur dan ternyata lebih sedikit, relative
terhadap utama berliku untuk menciptakan lebih banyak perlawanan. Sehingga
menempatkan memulai berkelok-kelok lapangan pada sudut yang berbeda
dibandingkan dengan utama belitan yang menyebabkan motor mulai berputar. Itu
utama berkelok-kelok, yang merupakan kawat berat, menjaga motor menjalankan
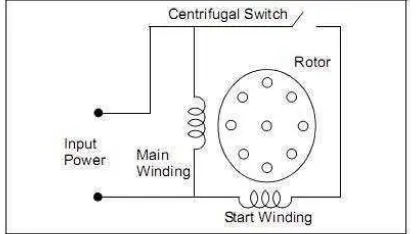
sisa waktu. Dibawah ini adalah gambar dari rangkaian motor fase sebelah:
Gambar 2.8. Rangkaian Motor Fase Sebelah
Torsi mulai rendah, biasanya 100% menjadi 175% dari rate torsi. Motor menarik
tinggi mulai saat ini, sekitar 700% menjadi 1.000% dari nilai arus. Itu torsi
maksimum yang dihasilkan berkisar 250% sampai 350% dari torsi rate (lihat
gambar 2.8 untuk torsi-kecepatan kurva). Baik untuk aplikasi motor split-fase
termasuk kecil penggiling. Kipas kecil dan blower dan rendah lainnya mulai torsi
aplikasi dengan kebutuhan daya dai 1/201/3 hp. Hindari menggunakan jenis motor
di setiap motor di setiap aplikasi membutuhkan tinggi pada/siklus harga off atau
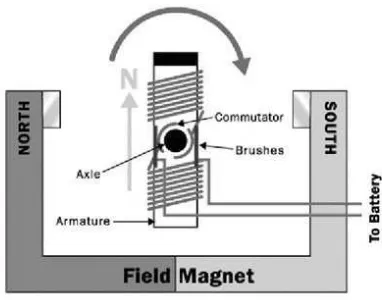
E. Motor DC
Motor DC merupakan motor yang banyak digunakan sebagai aktuatuor, baik
dalam sistem kendali posisi maupun sistem kendali kecepatan. Kini motor DC
memegang peranan penting dalam dunia perindustrian. Hal ini tampak dari
banyaknya penggunaan motor DC pada devais-devais elektronik. Motor DC ini
umumnya digunakan untuk pergerakan mekanis pada aplikasi-aplikasi tertentu,
seperti gerakan memutar pada kertas atau drive CD. Motor DC banyak digunakan
sebagai penggerak dalam berbagai peralatan, baik kecil maupun besar, lambat
maupun cepat. Ia juga banyak dipakai karena cukup dapat dikendalikan dengan
mudah pada kebanyakan kasus. Cara pengendalian motor DC bisa secara
ON/OFF biasa. Pemilihan cara pengendalian akan tergantung dari kebutuhan
terhadap gerakan motor DC itu sendiri.
Elemen utama motor DC adalah:
Magnet
Armatur atau rotor
Commutator
Sikat (Brushes)
20
Gambar 2.9. Konstruksi Motor DC
(http://elektronika-dasar.com/teori-elektronika/prinsip-kerja-motor-dc)
Motor DC berputar sebagai hasil saling interaksi dua medan magnet. Interaksi ini
terjadi disebabkan arus yang mengalir pada kumparan.
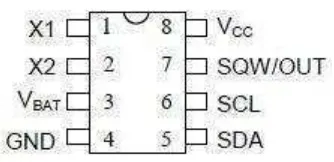
F. Real-Time Clock (RTC) DS1307
RTC yang dimaksud adalah real time clock (bukan real time computing) yang
berupa IC dan mempunyai clock sumber sendiri dan internal batery untuk
menyimpan data, waktu, dan tanggal. Sehingga apabila sistem komputer atau
mikrokontroller dalam keadaan OFF atau tidak mendapat supply tegangan dari
catu daya maka waktu dan tanggal di dalam memori RTC tetap uptodate.
Salah satu RTC yang sudah populer dan mudah dalam penggunaan-nya adalah
tipe DS1307 dimana tipe ini lebih compatible dengan mikrokontroller keluarga
Gambar 2.10. Konfigurasi pin DS1307
(www.maxim-ic/dallas-semiconductor.com)
DS1307 mempunyai life time sampai tahun 2100 dengan akurasi waktu yang
dimilikinya, mikrokontroller hanya mengambil atau mengolah data pewaktu baik
tanggal, bulan, dan waktu pada DS1307. Berikut ini adalah fitur-fitur yang
terdapat pada IC DS1307.
a) Real-time clock (RTC) menghitung detik, menit, jam, tanggal, bulan, dan
hari. Tahun valid sampai tahun 2100
b) Ram 56-byte, nonvolatile untuk menyimpan data.
c) 2 jalur serial interface (I2C).
d) Output gelombang kotak yg diprogram.
e) Automatic power-fail detect and switch.
f) Konsumsi arus hanya 500 nA pada batery internal.
g) Mode dengan oscillator running.
h) Temperature range: -40°C sampai +85°C.
Untuk membaca data tangal dan waktu yang tersimpan di memori RTC DS1307
dapat dilakukan melalui komunikasi serial I2C seperti tampak pada gambar
22
Gamabar 2.11. Typical Operating Circuit
(www.maxim-ic/dallas-semiconductor.com)
DS1307 beropersai sebagai slave pada bus I2C. Cara Access pertama mengirim
sinyal START diikuti device address dan alamat sebuah register yg akan dibaca.
Beberapa register dapat dibaca sampai STOP condition dikirim.
Gambar 2.12. Peta Data Memori DS1307
Data waktu dan tanggal tersimpan dalam memori masing masing 1 byte, mulai
dari alamat 00H sampai 07H. Sisanya (08H~3FH alamat RAM yg bisa
digunakan).
G. Timbangan
Timbangan adalah alat yang dipakai untuk melakukan pengukuran massa suatu
benda. Timbangan atau neraca dikategorikan kedalam sistem mekanik dan juga
elektronik atau digital.
Salah satu contoh timbangan adalah neraca pegas (dinamometer). Neraca pegas
adalah timbangan sederhana yang menggunakan pegas sebagai alat untuk
menentukan massa benda yang diukurnya. Neraca pegas (seperti timbangan
badan) mengukur berat, defleksi pegasnya ditampilkan dalam skala massa (label
angkanya sudah dibagi gravitasi).
24
H. Relay
Relay adalah sebuah peralatan listrik yang berfungsi sebagai saklar (switch). Dan
relay bekerja pada saat coil pada relay diberikan tegangan atau arus. Pada saat
coil diberikan arus maka pada inti coil akan menjadi magnet yang kemudian
menarik kontak-kontak penghubung pada relay tersebut. Pada relay juga terdapat
dua buah kontak yang berbeda yaitu kontak NO (Normaly Open) yang bekerja
pada saat kumparan coil belum diberikan arus maka keadaan kontak NO akan
terbuka dan pada saat kumparan coil diberikan arus maka kontak NO akan
terhubung, sedangkan untuk kontak NC(Normaly Close) pada saat kumparan coil
belum diberikan arus maka kontak NC akan terhubung atau belum terhubung dan
pada saat kumparan coil dialiri arus maka kontak NC akan terbuka atau tidak
terhubung.
Gambar 2.14. Konstruksi Relay
Relay sering digunakan pada sistem kelistrikan yang bertegangan rendah dan
bertegangan tinggi. Tegangan rendah digunakan untuk mengaktifkan kumparan
coil agar kontak-kontak relay tehubung untuk kontak NO dan tebuka untuk kontak
NC. Sedangkan tegangan tinggi yang terpasang pada kontak-kontak relay baik
kontrak NO atau kontak NC, karena kontak-kontak hubung pada relay dirancang
dengan bahan tembaga yang tahan terhadap tegangan dan arus yang besar sesuai
dengan standar pada relay tersebut.
I. Resistor
Resistor merupakan komponen elektronika yang mempunyai sifat resistansi
(menahan) arus listrik. Nilai resistansi (hambatan) pada sebuah resistor dinyatakan
dengan satuan Ohm yang dilambangkan dengan symbol Ω. Menurut nilai
hambatannya resistor dapat digolongkan menjadi tiga jenis, yaitu resistor dengan
tahanan tetap, resistor dengan tahanan Variable, dan Resistor Non Linier.
a) Resistor Tetap
Resistor tetap adalah resistor yang memiliki nilai resistansi (hambatan) yang tetap.
Nilai resistansi pada sebuah resistor biasanya sudah dicantumkan pada resistor
tersebut dalam bentuk gelang warna atau dituliskan dengan angka-angka secara
26
Gambar 2.15. Simbol dan Penampang Resistor Tetap
(http://www.williamson-labs.com/resistors.htm)
Untuk mengetahui nilai hambatan pada resistor dapat dilihat atau dibaca melalui
gelang warna yang ada dengan ketentuan sesuai berikut:
1. Pada resistor yang menggunakan 4 buah gelang warna, mempunyai
konfigurasi gelang pertama dan gelang ke dua sebagai angka. Gelang ke
tiga merupakan pengali dan gelang ke empat sebagai toleransi.
2. Pada resistor yang memiliki 5 buah gelang warna, memiliki konfiguraisi
gelang pertama, kedua, dan ke tiga adalah angka sedangkan gelang ke
empat adalah pengali dan gelang ke lima adalah toleransi transistor.
3. Sedangkan pada resistor yang mempunyai 6 gelang warna mempunyai
konfigurasi yang sama dengan resistor yang mempunyai 5 gelang warna.
Hanya saja pada resistor yang menggunakan 6 gelang warna, dilengkapi
dengan koefisien suhu yang di cantumkan pada gelang terakhir atau gelang
ke enam.
Pada gambar 2.15 berikut adalah gambar gelang warna yang masing-masing dari
Gambar 2.16. Gelang Warna Resistor
(http://www.williamson-labs.com/resistors.htm)
Nilai hambatan (resistensi) sebuah resistor terkadang berbeda antara hasil
perhitungan dari gelang warna dengan perhitungan dengan menggunakan alat. Hal
ini dapat terjadi karena ada perubahan nilai hambatan pada saat produksi atau
karena panas pada saat penyolderan. Oleh karena itu maka diberikan nilai
toleransi pada sebuah resistor.
b) Resistor Variabel
Resistor Variabel merupakan sebuah resistor yang nilai hambatanya tidak tetap
atau dapat diubah–ubah atau disesuaikan dengan kebutuhan. Resistor ini
dilambangkan dengan lambang yang hampir sama dengan resistor biasa hanya
28
Gambar 2.17. Lambang Variabel Resistor
(http://www.williamson-labs.com/resistors.htm)
resistor variable yang sering dijumpai dipasaran adalah Potensiometer dan
Trimpot. Trimpot merupakan jenis resistor variabel yang nilai hambatannya dapat
diubah dengan mengunakan obeng.
Gambar 2.18. Trimport
(http://www.williamson-labs.com/resistors.htm)
Sedangkan potensiometer merupakan jenis resistor variable yang nilai
hambatannya dapat diubah atau disesuaikan langsung dengan menggunakan
tangan. Berikut adalah gambar berbagai macam potensio yang merupakan resistor
Gambar 2.19. Potensiometer
(http://www.williamson-labs.com/resistors.htm)
c) Resistor Non Linear
Resistor Non Linier merupakan resistor yang mempunyai nilai tahanan tidak tetap
dan terpengaruh oleh lingkungan, missal ; suhu, intensitas cahaya, dll. salah satu
contoh Resistor Non Linier adalah LDR, PTC dan NTC. PTC (Positive
Temperatur Coefisien) adalah jenis resistor non linier yang nilai hambatannya
terpengaruh oleh perubahan suhu. Makin tinggi suhu yang mempengaruhi makin
besar nilai hambatannya. NTC (Negative Temperatur Coefisien) adalah jenis
resistor non linier yang nilai hambatannya terpengaruh oleh perubahan suhu.
Makin tinggi suhu yang mempengaruhi makin kecil nilai hambatannya. LDR
(Light Dependent Resistor) adalah jenis resistor non linier yang nilai hambatannya
terpengaruh oleh perubahan intensitas cahaya yang mengenainya. Makin besar
30
Gambar 2.20. Simbol dan penampang LDR, NTC dan PTC
(http://www.williamson-labs.com/resistors.htm)
Sesuai dengan namanya resistor bersifat resistif dan umumnya terbuat dari bahan
karbon. Dari hukum Ohm diketahui, resistansi berbanding terbalik dengan jumlah
arus yang mengalir melaluinya.
(2.3)
Dimana :
R = resitansi (Ohm)
V = tegangan (Volt)
I = arus (Ampere)
Satuan resistansi dari suatu resistor disebut Ohm atau dilambangkan dengan
simbol Ω (Omega). Tipe resistor yang umum adalah berbentuk tabung dengan dua
gelang kode warna untuk memudahkan dalam mengenali besarnya resistansi pada
resistor tersebut tanpa mengukur besarnya dengan Ohm meter.
(Mudjiono dkk. 2003. Ketrampilan Elektronika Bahan Acuan Kegiatan Belejar Mengajar. MGMP Mulok Elektronika Bandar Lampung)
J. Transistor
Transistor merupakan alat semikonduktor yang dipakai untuk penguat, sebagai
sirkuit pemutus dan penyambung (switching), stabilisasi tegangan, modulasi
sinyal atau sebagai fungsi lainnya. Transistor dapat berfungsi seperti kran listrik,
dimana berdasarkan arus masukannya (BJT) atau tegangan masukannya (FET),
memungkinkan pengaliran listrik yang sangat akurat dari sirkuit sumber
listriknya.
Gambar 2.21. Schematic Transistor
(http://fourier.eng.hmc.edu/e84/lectures/ch4/node3.html)
Transistor memiliki 3 terminal, yaitu basis (B), emitor (E) dan kolektor (C).
32
arus dan tegangan yang lebih besar daripada arus input basis, yaitu pada keluaran
tegangan dan arus output kolektor. Transistor merupakan komponen yang sangat
penting dalam dunia elektronik modern. Dalam rangkaian analog, transistor
digunakan dalam penguat. Rangkaian analog melingkupi pengeras suara, sumber
listrik stabilisator dan penguat sinyal radio. Dalam rangkaian-rangkaian digital,
transistor digunakan sebagai saklar berkecepatan tinggi. Beberapa transistor juga
dapat dirangkai sedemikian rupa sehingga berfungsi sebagai logic gate, memori
dan fungsi rangkaian-rangkaian lainnya.
K. Dioda
Dioda adalah komponen elektronika semikonduktor yang memiliki 1 buah
junction, sering disebut sebagai komponen 2 lapis (lapis N dan P). Dioda
merupakan suatu semikonduktor yang hanya dapat menghantar arus listrik dan
tegangan pada satu arah saja. Bahan pokok untuk pembuatan dioda adalah
Germanium (Ge) dan Silikon/Silsilum (Si). Dioda mempunyai dua elektrode yang
aktif dimana arus listrik dapat mengalir dari anoda ke katoda, dan kebanyakan
dioda digunakan karena karakteristik satu arah yang dimilikinya. Fungsi paling
umum dari dioda adalah untuk mengalirkan arus listrik mengalir dalam suatu arah
yang sering juga disebut kondisi bias maju (forward) dan untuk menahan arus dari
arah sebaliknya sering disebut kondisi bias mundur (reverse). Secara simbol dan
Gambar 2.22. Schematic dan Konstruksi Dioda
(http://komponenelektronika.net/pengertian-dioda.htm)
Dioda akan bekerja pada saat tegangan breakdown diberi tegangan minimal 0.7
Volt supaya arus listrik dapat mengalir dari anoda ke katoda. Dioda sering juga
digunakan sebagai penyearah tegangan dari AC ke DC dan juga sering digunakan
III. METODE PENELITIAN
A. Waktu dan Tempat
Penelitian dan perancangan tugas akhir dilakukan di Laboratorium Terpadu
Teknik Elektro Universitas Lampung dilaksanakan mulai bulan Desember 2011
sampai dengan Oktober 2012.
B. Alat dan Bahan
Alat dan bahan yang digunakan dalam penelitian yaitu:
a. Instrumen dan komponen Elektronika yang terdiri atas:
1. Multitester
2. Motor AC dan DC
3. Transistor
4. Resistor
5. Dioda
6. Relay
7. LCD
8. Tombol switch ON/ OFF
9. IC RTC DS1307
11.IC H-Bridge L298
12.Timbangan yang ditambahkan resistor geser
b. Perangkat kerja yang terdiri atas:
1. Komputer
2. Power supply
3. Downloader AVR
4. Papan projek (Project Board)
5. Bor PCB
6. Solder
7. Kabel penghubung
c. Komponen bantu yang terdiri atas:
1. Papan plastik mika (Accrilyc)
2. PCB
3. Feritklorit
4. Timah
C. Prosedur Kerja
Langkah kerja dalam tugas akhir ini meliputi:
36
Adapun diagram alir dapat dilihat pada gambar 3.1 berikut:
Tidak
D. Studi Literatur
Dalam studi literatur dilakukan pencarian informasi mengenai segala sesuatu yang
berkaitan dengan penelitian ini adalah sebagai berikut:
1. Karakteristik dan spesifikasi motor listrik AC dan motor listrik DC.
2. Datasheet IC L298
3. Karakteristik komponen-komponen yang akan digunakan serta prinsip
kerjanya.
4. Cara kerja dan pemrograman mikrokontroler ATMega32
E. Spesifikasi Rancangan
Pada pembuatan alat pengaturan pakan secara otomatis terdapat spesifikasi
rancangan blok pengaturan pakan dan gambar rancangan sebagai berikut:
38
Penjelasan dari blok pengaturan pakan tersebut apabila sensor mendeteksi beban
berat pada tumpuan beban terhadap timbangan maka proses akan dilanjutkan ke
pengkondisi tegangan atau memberikan masukan (input) untuk ADC (Analog
Digital Converter) pada pinA yang berupa tegangan analog dan kemudian
tegangan akan diolah menjadi tegangan digital hingga keluarannya sesuai dengan
program yang diinginkan. ADC akan mengubah nilai tegangan 0 Volt sampai
dengan 5 Volt dari keluaran sensor menjadi bilangan ADC dengan resolusi ADC
10 bit dan bilangannya dari 0 sampai dengan 1024. Bilangan inilah yang ditulis
pada bahasa program mikrokontroler. Karena mikrokontroler tidak dapat
membaca tegangan analog sebelum ADC mengubah tegangan analog menjadi
tegangan digital, sebab itulah peranan ADC sangat diperlukan agar mikrokontroler
dapat membaca output dari sensor.
Untuk megatur berat pakan yang akan di tebar maka dipasang tombol switch,
dimana akan diletakkan tombol-tombol yang berfungsi sebagai masukan bagi
mikrokontroler yang sebelumnya sudah diatur untuk setiap satu tombol switchON
jumlah berat pakan yang akan ditimbang seberat 1 kg dengan cara mengubah
posisi switch dari OFF menjadi ON kemudian nilai dari switch ON dikalibrasi
dengan timbangan yang dipasang tahanan geser. Oleh karena itu untuk
mendapatkan jumlah berat takaran pakan yang di inginkan dengan menggunakan
beberapa switch maka pada setiap switch ON harus dihitung terlebih dahulu.
Peranan LCD digunakan untuk menampilkan hasil pemrograman dari
mikrokontroler, yaitu seberapa berat pakan yang diatur oleh switch dan kemudian
ditampilkan pada layar LCD. LCD juga dapat memonitoring apabila jumlah pakan
sudah pada posisi siap untuk disebarkan ke tambak atau kolam. Selain itu LCD
juga dapat menampilkan bekerja atau tidak nya motor baik untuk motor
penyembur pakan atau motor kincir.
IC RTC DS1307 merupakan fitur yang digunakan sebagai pewaktu yang
kemudian pada portC SDA dan SCL difungsikan sebagai transfer data pewaktu
pada mikrokontroler untuk waktu pemberian pakan berlangsung. Pada umum nya
pemberian pakan dilakukan empat kali dalam satu hari, pagi hari sekitar pukul
07:00 wib, siang hari pada pukul 12:00 wib, sore hari pada pukul 17:00 wib, dan
untuk malam hari pada pukul 21:00 wib. Oleh sebab itu konfigurasi pengaturan
waktu harus disesuaikan pada jam-jam pemberian pakan, sebab pada saat
pemberian pakan sedang berlangsung motor kincir harus dalam kondisi OFF atau
tidak bekerja dan motor pemberian pakan dalam kondisi ON atau bekerja. Proses
seperti ini harus tepat waktu dan tidak boleh terbalik antara motor kincir dengan
motor pemberian pakan. Sebab apabila sampai terbalik antara motor kincir dengan
motor pemberian pakan maka proses penjadwalan pemberian pakan tidak dapat
bekerja dengan baik.
Pada rangkaian mikrokontroller memiliki fungsi sebagai switch, mikrokontroller
bekerja pada saat pin yang telah ditetapkan sebagai pininput diberikan tegangan
sebesar 5 Volt DC. Penentuan pin untuk menjadi pin input atau output sesuai
kebutuhan yang diperlukan dengan perintah yang dibuat pada program data
mikrokontroller. Dari nilai output pada mikrokontrol inilah yang digunakan untuk
memicu basis pada transistor agar relay dapat bekerja, baik dalam kondisi ON
40
b. Secara keseluruhan gambar rancangan pada tugas akhir ini adalah seperti
gambar 3.3 berikut:
Gambar 3.3. Rancangan Yang Akan Dibuat
Penjelasan dari penomoran tiap-tiap bagian peralatan adalah sebagai berikut:
1. Tangki utama, dimana tangki ini berfungsi sebagai penampung pakan
sebelum pakan ditimbang dan di tebar.
2. Kran atau pintu pada tangki utama, dimana pada kran ini difungsikan
untuk membuka dan menutup keluarnya pakan dari tangki utama ke tangki
timbangan.
3. Tangki timbangan, berfungsi untuk menimbang jumlah berat pakan yang
4. Timbangan, dimana timbangan ini telah dimodifikasi dan diberi tahanan
geser yang kemudian digunakan sebagai inputan pada kontrol elektrik.
5. Kran atau pintu pada tangki timbangan, berfungsi untuk membuka dan
menutup keluarnya pakan dari tangki timbangan yang sebelumnya sudah
ditimbang terlebih dahulu.
6. Pipa, berfungsi untuk mengalirkan pakan dari tangki timbangan menuju ke
motor atau kipas penebar pakan.
7. Motor kipas penebar pakan, berfungsi sebagai penebar pakan pada saat
pipa mengalirkan pakan dan jatuh tepat diatas kipas penebar pakan maka
pakan akan tersebar.
8. Motor penghasil gelembung udara, berfungsi sebagai penghasil gelembung
udara sebagai alat bantu pernapasan udang windu.
F. Perancangan Perangkat Keras
Berdasarkan spesifikasi rancangan di atas perangkat yang di gunakan dalam
penelitain yang di lakukan adalah sebagai berikut:
a. Power Supply
Power supply merupakan perangkat yang terdiri dari beberapa komponen
elektronika, secara fungsi power supply di gunakan sebagai pengubah tegangan
AC yang di hasilkan oleh transformotor menjadi tegangan DC. Tegangan DC yang
di hasilkan oleh catu daya digunakan sebagai sumber tegangan untuk rangkaian
42
Gambar 3.4. Rangkaian Power Supply Yang Telah Distabilkan
b. Sensor Berat
Sensor berat yang digunakan adalah timbangan analog yang di modifikasi dengan
menggunakan rangkaian pembagi tegangan. Seperti pada gambar 3.5 berikut:
Gambar 3.5. Rangkaian Sensor Berat
Dapat dilihat pada gambar 3.5 dimaksudkan bahwa gambar tersebut merupakan
sensor berat ini terdiri dari timbangan analog yang pada ujung poros penunjukkan
angka nya di hubungkan dengan variabel resistor sebagai pendeteksi berat untuk
memberikan nilai tegangan masukan pada ADC yang dapat berubah-ubah nilai
tegangan keluarannya sesuai dengan berat yang terbaca pada timbangan analog
tersebut. Sensor ini bekerja dengan merubah input tekanan menjadi tahanan atau
resistansi yang kemudian di konversikan ke tegangan. Semakin berat beban yang
diberikan maka semakin besar pula tegangan yang dihasilkan pada variabel
resistor tersebut untuk dikonversikan oleh ADC yang kemudian dikirimkan ke
mikrokontroler sebagai nilai masukan.
c. Rangkaian RTC DS1307
Rangkaian RTC berfungsi sebagai back-up pewaktu apabila sumber tegangan dari
catu daya terputus atau OFF maka RTC DS1307 masih dapat beroperasi karena
memiliki sumber sendiri dari internal battery untuk menyimpan data, waktu, dan
tanggal. Sehingga apabila power supply atau mikrokontroller dalam keadaan OFF
atau tidak mendapat supply tegangan dari catu daya maka waktu dan tanggal di
dalam memori RTC tetap uptodate. Kemudian pada portC SDA dan SCL
difungsikan sebagai transfer data pewaktu pada mikrokontroller, hal ini
dikarenakan supaya penjadwalan suatu program dapat berlagsung dengan benar
44
Gambar 3.6. Rangakaian RTC DS1307
d. Rangkaian Pengendali
Rangkaian pengendali atau kontrol berfungsi untuk mengendalikan kerja dari
rangkaian pengaturan pakan secara otomatis. Kemudian memerintahkan pemicu
dan triac dalam kondisi on atau off. Rangkaian kontrol ini menggunakan
mikrokontroler ATMega32 yang memiliki fitur membaca nilai analog yaitu fitur
ADC. Pin yang digunakan untuk ADC adalah PinA0 sampai PinA7 yang terdapat
pada mikrokontroler ATMega32. Pada pin ini berfungsi untuk menerima masukan
berupa tegangan DC analog yang kemudian dikonversikan menjadi nilai ADC.
Input pada keypad menggunakan PinD0 sampai PinD7 yang difungsikan sebagai
perintah untuk mengatur berapa banyak jumlah pakan yang harus ditakar atau
ditimbang. LCD menempatkan posisi PinC0 sampai PinC7 pada mikrokontroler
Gambar 3.7. Rangkaian Mikrokontroller dengan Pin Input dan Output
e. Rangkaian Pemicu Motor Listrik AC
Pada rangkaian pemicu untuk motor listrik AC digunakan relay sebagai pengganti
saklar atau switch untuk motor. Rangkaian pemicu motor dapat dilihat seperti
46
Gambar 3.8. Rangkaian Pemicu Motor listrik
Penambahan relay pada rangkaian pemicu motor ini dikarenakan motor listrik
sendiri memiliki daya yang sangat besar dan sangat riskan akan gangguan. Prinsip
kerja dari rangkaian pemicu untuk motor ini adalah untuk mengaktifkan relay
yang bertegangan 12 V. Relay inilah yang digunakan sebagai saklar untuk motor
AC. Relay akan bekerja pada saat sumber tegangan sebesar 12 V dirangkai secara
seri pada sebuah transistor, (BC547) pada Pin kolektor seperti terlihat pada
gambar 3.8. Pada saat basis pada transistor diberikan arus maka transistor akan
bekerja dan mengalirkan arus dari kolektor ke emitor sehingga led akan menyala
dan kumparan koil relay akan menjadi magnet dan kontak relay akan bekerja
sehingga motor AC akan berputar atau bekerja (ON).
Arus basis yang diterima pada transistor diperoleh dari PinB dari mikrokontroler
yang bertegangan 5 Volt DC. Rangkaian pemicu motor listrik ini digunakan
memiliki torsi yang besar sehingga penggunaannya sangat mendukung untuk
rangkaian mekanik penebar pakan dan kincir.
f. Rangkaian Kontrol Motor DC Dengan IC H-Bridge L298
Untuk mengontrol kecepatan perputaran motor digunakan metoda PWM (Pulse Width Modulation). PWM adalah merupakan suatu metode untuk mengatur kecepatan perputaran motor dengan cara mengatur prosentase lebar pulsa high terhadap perioda dari suatu sinyal persegi dalam bentuk tegangan periodik yang diberikan ke motor sebagai sumber daya. Semakin besar perbandingan waktu sinyal high dengan perioda sinyal, maka semakin cepat motor berputar. Frekuensi PWM yang digunakan sekitar 1 kHz. Rangkaian sistem penggerak motor DC ditunjukkan pada gambar 3.9. berikut:
48
g. Rangkaian LCD
LCD digunakan untuk menampilkan perintah-perintah yang ditulis pada program
mikrokontroller. LCD dalam rangkaian ini akan menampilkan nilai ADC yang
Gambar 3.10. Rangkaian LCD ke Mikrokontroller
(http://code4shared.wordpress.com/category/c/arduino/)
h. Pembuatan Program Data
Pembuatan program data pada mikrokontroler adalah menuliskan kode atau
perintah pada mikrokontroler ATMega32, penulisan perintah ini menggunakan
bahasa pemrograman C pada software Code Vision AVR. Program data yang
direncanakan untuk mikrokontroler ATMega32 mempunyai fungsi sebagai
berikut :
1. Menerima input dari sensor berat yang kemudian di konversi oleh ADC.
2. Memproses sinyal input dari sensor berat melalui ADC, dengan perhitungan
3. Nilai input ADC yang telah dikonversi pada resolusi ADC, selanjutnya
memerintahkan output pada PortB dari mikrokontroller dan menjadi nilai
masukan bagi rangkaian pemicu motor listrik AC yang kemudian akan
mengaktifkan relay dalam kondisi bekerja atau tidak (on/off).
i. Pengujian Alat
Pengujian alat dilakukan secara bertahap, dari rangkaian power supply, rangkaian
sensor berat, rangkaian mikrokontroller, kemudian rangkaian pemicu triac.
Pengujian secara bertahap ini dimaksudkan agar penulis dapat mengetahui
bagian-bagian yang tidak bekerja. Dan kemudian dapat diperbaiki secara terpisah pada
tiap-tiap bagian. Jika semua bagian rangkaian bekerja dengan baik maka semua
rangkaian dipasang secara keseluruhan, agar dapat diketahui apakah rangkaian
V. SIMPULAN DAN SARAN
A. Simpulan
Berdasarkan pengamatan dan pengujian alat secara keseluruhan maupun
perbagian dapat diperoleh kesimpulan sebagai berikut :
1. Alat pemberian pakan ini bekerja secara otomatis agar proses pemberian
pakan dapat lebih efisien dan terkendali.
2. Dengan adanya alat pengatur pakan secara otomatis maka proses pemberian
pakan dapat berlangsung tanpa dilakukan sendiri oleh manusia.
3. Proses penjadwalan pada saat pemberian pakan dapat berlangsung sesuai
tepat waktu tanpa harus berkeliling kolam atau tambak dengan berjalan kaki
dengan menebarkan pakan di sepanjang kolam atau tambak.
4. Tingkat keamanan atau terjadinya kecelakaan kerja dapat diminimalisir
karena pemilik kolam atau tambak tidak harus berkeliling kolam atau tambak
dengan berjalan kaki dengan menebarkan pakan di sepanjang kolam atau
tambak.
5. Dengan alat ini berat takaran pakan dapat dikontrol, dan tidak menyebabkan
Saran yang dapat dijadikan pertimbangan pada pembuatan alat pengatur pakan
secara otomatis adalah sebaiknya penggunaan sensor dan timbangan maupun
rancangan mekanis pada alat ini didesain sedemikian sehingga proses berat yang
tertimbang sesuai dengan program yang telah dibuat. Supaya tingkat kesalahan
atau error pada saat pemberian pakan sedang berlangsung dapat diminimalkan
dan selanjutnya dapat dirancang kembali dengan kapasitas yang sesuai dengan
DAFTAR PUSTAKA
Arifianto, D. 2011. Kumpulan Rangkaian Elektronika Sederhana. Kawan Pustaka,
Jakarta
Heryanto, A dan Adi, W.P. 1991. Pemroggraman Bahasa C Untuk
Mikrokontroler Atmega8535.Andi. Yogyakarta.
Mudjiono dkk. 2003. Ketrampilan Elektronika Bahan Acuan Kegiatan Belejar
Mengajar. MGMP Mulok Elektronika Bandar Lampung
Sulistiyanti, S.R dan Setyawan, FX.A. 2006. Dasar Sistem Kendali ELT 307.
Universitas Lampung. Lampung
Winoto, A. 2008. Mikrokontroller AVR ATMeg8/32/16/8535 dan Pemroggraman
dengan bahasa C Pada WINAVR. Infomatika Bandung
Zuhal.1995. Dasar Teknik Tenaga Listrik dan Elektonika Daya. Gramedia
Pustaka Utama, Jakarta.
http://wordpress.com/en/Tutorial/LiquidCrystal. Akses tanggal 22 Januari 2013
http://www.williamson-labs.com/resistors.htm. Akses tanggal 22 Januari 2013
http://wordpress.com.org/fungsi-relay.htm. Akses tanggal 28 Januari 2013
http://wordpress.com/doc/lahan-basah-buatan. Akses tanggal 10 Januari 2013
www.maxim-ic/dallas-semiconductor.com. Akses tanggal 16 Februari 2013
http://thathit.wordpress.com/pengukuran-dan-pengendalian. Akses tanggal 20