DAFTAR PUSTAKA
[1]. Ali,Muhammad MT,Ariadie Chandra N MT, dan Andika Asmara SPd.2013.Modul Proteus Profesional Untuk Simulasi Rangkaian Digital dan Mikrokontroler.Pendidikan Teknik Elektro FT UNY.6 [15 Juli 2014].
[2]. Andrianto,Heri.2013.Pemograman Mikrokontroler AVR ATMega 16 Menggunakan Bahasa C (CodeVisionAVR).Informatika Bandung.Bandung.
[3]. Bioshop,Owen.2002.Elektronika Dasar.Erlangga.Jakarta
[4]. Budioko,Totok.2005.Belajar Dengan Mudah dan Cepat Pemrograman Bahasa C dengan SDCC ( Small Device C Compiler ) Pada Mikrokontroler AT 89X051/AT 89C51/52 Teori,Simulasi dan Aplikasi.Gava Media.Yogyakarta.
[5]. Chandra N,Ariodie MT,Muhammad Ali MT,dkk.2012. Modul Proteus Profesional 7.5 Isis Digital Generator. Pendidikan Elektro FT UNY.1;9-10[16 Juli 2014].
[6]. Datasheet ATMega 8
[7]. Gabriel,JF.2008.Fisika Lingkungan.Hipokrata.Jakarta.
[8]. Hartono,Jugiyanto.1993.Konsep Dasar Pemrograman Bahasa.Andi Yogyakarta.
[9]. Saputra,Virgi dan Hartanto,Huriawati.2002.Intisari Fisika.Hipokrates.Jakarta. [10]. Setiawan,Sulhan.2006.Mudan dan Menyenangkan Belajar
Mikrokontroler.Andi Yogyakarta.Yogyakarta.
[11]. Susilo,Deddy.2010.48 Jam Tuntas Mikrokontroler MCS51 & AVR.Andi Yokyakarta.Yogyakarta.
[12]. Utama,Teguh Putra.2011.Perancangan Alat Pemonitor Besaran-Besaran ListrikBerbasisMikrokontroler ATMega.[Skripsi].Medan:Universitas Sumatera Utara,Program Sarjana.
BAB 3
PERANCANG ALAT
3.1 Prinsip Kerja Sistem
Prinsip kerja system keseluruhan adalah dimulai dari menerima kuat sinyal oleh Dioda Germanium.Kuat sinyal tersebut kemudian diubah oleh rangkaian diode germanium menjadi tegangan.Tegangan yang dihasilkan oleh rangkaian diode germanium asih bersifat analog.Oleh karena itu agar tegangan tersebut dapat diproses secara digital dengan mikrokontroler, maka tegangan tersebut harus diubah terlebih dahulu ke digital.Perangkat converter analaog ke digital (Analog to DigitalConverter) ADC, berfungsi untuk mengubah tegangan analog keluaran rangkaian diode germanium menjadi data digital.Data digital keluaran dari perangkat ADC kemudian diproses didalam mikrokontroler dan dikalibrasi untuk kemudia ditampilkan pada layar tampilan LCD.
3.1.1 Blok Diagram
System untuk mengukur besar nya intensitas cahaya tampak ini berdiri dari beberapa bagian yang digambarkan menjadi blok diagram pada gambar 3.1 berikut ini
Gambar 3.1 Blok Diagram Sistem Secara Keseluruhan
Handy Talky
Secara keseluruhan system terdiri dari lima bagian yaitu diode germanium, input saklar, mikrokontroler, display LCD dan indicator LED untuk menunjukkan kesiapan.
1. Dioda Germanium
Rangkaian ini digunakan untuk menstabilkan tegangan 2. Mikrokontroler
Mikrokontroler yang digunakan adalah mikrokontroler atmega 8 yang akan melakukan proses pengolahan data, perhitungan data, kalibrasi dan mengubah tegangan analog keluara dari rangkaian sensor menjadi digital 8 bit melalui ADC yang akan dikirim pada layar LCD.
3. Input Saklar
Input Saklar adalah saklar yang digunakan untuk mengaktifkan mikrokontroler.
4. Konfigurasi Display LCD
Konfigurasi Display LCD berfungsi untuk menampilkan inforasi pengukuran kepada pengguna.LCD yang digunakan adalah LCD tipe M1632, terdiri dari dua baris dan masing-masing berdiri terdiri dari 16 karakter (biasanya dikenal dengan LCD 16 x 2).Tiap karakter berukuran 5 x 7 dot matrix.
5. Indikator LED
6 Antena
Antena merupakan bagian yang langsung terhubung ke bagian alat,antena
berfungsi sebagai pendeteksi,penangkap sinyal radio frekuensi yang ada di
daerah sekitar nya serta mengirimkan nya ke rangkaian utama untuk di proses
atau di ubah menjadi tegangan DC
3.2 Perangkat Keras
Sirkuit perangkat keras secara keseluruhan dibuat dengan menggunakan komponen-komponen sesuai dengan fungsi dari blok-blok system yang digambarkan pada gambar 3.1 menunjukkan skematik diagram perangkat keras system.
3.2.1 Mikrokontroler
Mikrokontroler yang digunakan adalah ATMEGA 8 produksi ATMEL yang memiliki 8 bit terminal I/O, dengan menggunakan Kristal sebesar 12.000.000 Hz maka akan memberikan kecepatan satu siklus mesin (Machine Cycle) sebesar 9,99µs.
1 MC = 12 x T
= 12 x . . = 9,99 x 10-6 s
3.2.2 Saklar
Saklar yang digunakan adalah saklar tekan yang berfungsi untuk mengaktifkan mikrokontroler.
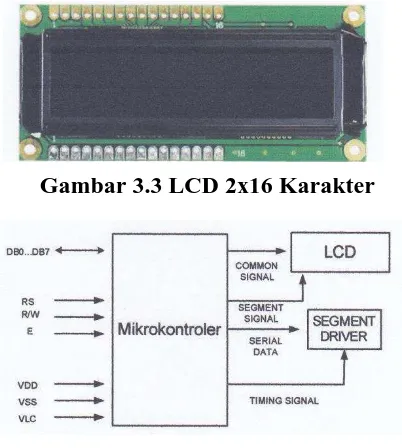
3.2.3 Display LCD
LCD adalah suatu display dari bahan cairan yang pengobrasiannya menggunakan system Dot Matriks. LCD banyak digunakan sebagai display alat-alat elektronika seperti kalkulator, multitester digital, jam digital dan sebagainya.
Gambar 3.3 LCD 2x16 Karakter
Gambar 3.4 Blok Diagaram LCD
Tabel 3.1 Pin LCD dan Fungsinya
Read Write, to chose write or read mode 0 = write mode
1 = read mode
6 E
Enable
0 = Start to lacht data to LCD character 1 = disable
ADC berfungsi untuk mengubah tegangan analog keluaran dari rangkaian sensor data digital 8 bit.ADC memiliki generator clock internal yang harus diaktifkan dengan menghubungkan sebuah resistor eksternal sera sebuah kapasitor eksternal.
3.3 Perangkat Lunak
inisialisasi, pembacaan data output ADC, konversi data, inisialisasi LCD, instruksi control LCD, pengiriman data ke LCD, menampilkan data ke LCD dan subrutin program lainnya yang berhubungan dengan proses yang dibutuhkan dalam pengolahan daa didalam mikrokontroler sampai menampilkan data hasil pengolahan tersebut kepada pengguna.
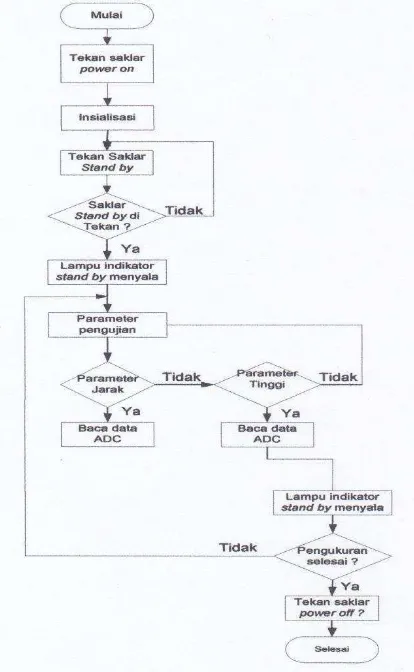
Algoritma pemrosesan data keseluruhan menggunakan mikrokontroler dapat di gambarkan pada gambar 3.5.Diagram aliran program mikrokontroler.
BAB 4
HASIL PENGUJIAN DAN ANALISIS DATA
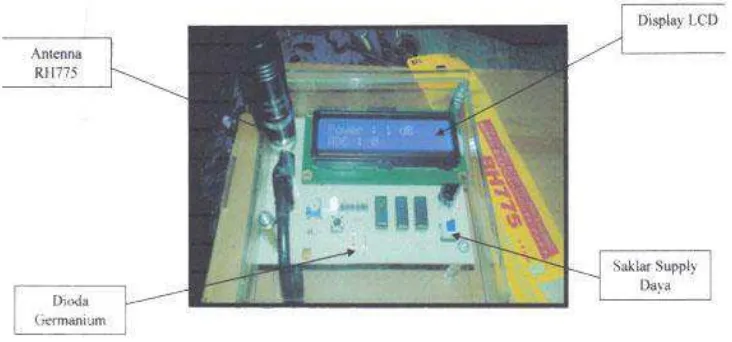
4.1 Hasil Rancang Bangun
Berdasarkan rancangan bangun pada Bab 3, maka dibuatlah system secara keseluruhan dari alat yang sudah dirancang.
Gambar 4.1 Perangkat Keras
4.2 Hasil Pengujian Daya Pancar Handy Talky
Tabel 4.1 Hasil Pengambilan Data Kuat Sinyal Terhadap Jarak
Jarak (m) Alat Ukur Uji (dB) Alat Ukur Standart (dB)
10 107 108
20 93 95
30 85 87
40 73 76
50 54 56
60 40 45
70 31 34
80 16 21
90 11 15
100 5 7
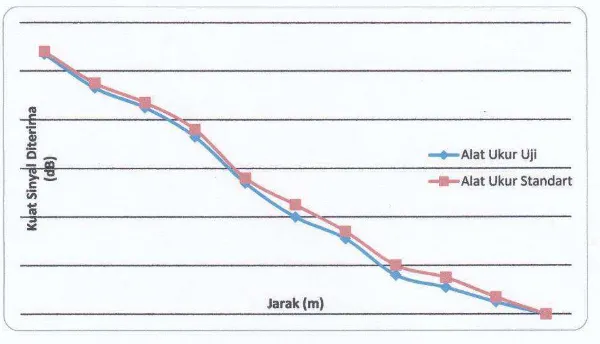
Untuk mempermudah menjelaskan mengenai hasil pengujian yang dilakukan terhadap alat yang telah dirancang digunakan dibuatlah grafik, yang ditunjukkan pada Gambar 4.1 berikut.
Gambar 4.1 Grafik Kuat Sinyal Diterima Terhadap Jarak
pemancar maka semakin rendah juga kuat sinyal yang diterima.Berdasarkan pengujian pada jarak terdekat yaitu 10 m dari pemancar kuat sinyal yang diterima sebesar 107 dB untuk alat ukur uji 108 dB untuk alat ukur standart.Pada jarak terjauh 100 m dari pemancar kuat sinyal yang diterima sebesar 5 dB untuk alat ukur uji 7 dB untuk alat ukur standart.Untuk pengujian selanjutnya adalah dengan mengubah parameter ketinggian pemancar dari permukaan tanah dengan jarak perangkat penerima sejauh 50 m. Adapun hasil pengujian ditunjukkan pada Tabel 4.2 berikut ini.
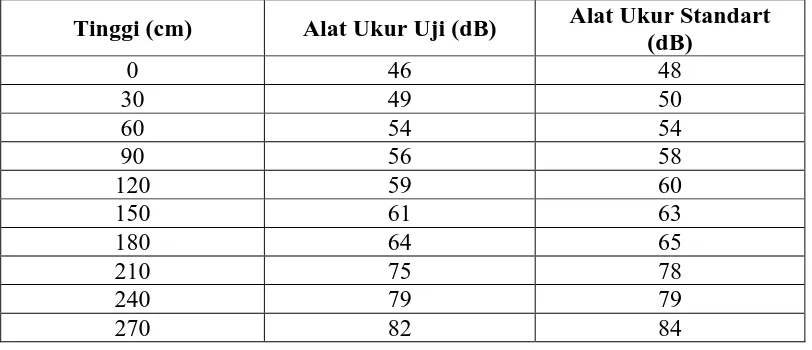
Tabel 4.2 Hasil Pengambilan Data Kuat Sinyal Terhadap Ketinggian
Tinggi (cm) Alat Ukur Uji (dB) Alat Ukur Standart (dB)
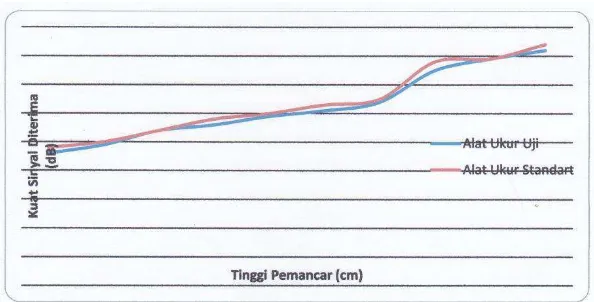
Gambar 4.2 Grafik Kuat Sinyal Diterima Terhadap Ketinggian Pemancar
Berdasarkan dari hasil pengujian ditunjukkan bahwa pada alat ukur standart hasil pembacaan lebih tinggi dibandingkan dengan alat ukur yang telah dirancang.Grafik menunjukkan bahwa parameter ketinggian mempengaruhi kuat sinyal yang diterima yaitu semakin tinggi perangkat pemancar maka semakin tinggi juga kuat sinyal yang diterima. Berdasarkan pengujian pada ketinggian terendah yaitu 0 cm dari permukaan tanah kuat sinyal yang diterima sebesar 46 dB untuk alat ukur uji dan 48 dB untuk alat ukur standart. Pada ketinggian tertinggi yaitu 270 cm kuat sinyal yang diterima sebesar 82 dB untuk alat ukur uji 84 dB untuk alat ukur standart.
4.3 Hasil Analisis Daya Pancar Handy Talky
%error = (Kuat Sinyal Alat Standart – Kuat Sinyal Alat Uji)/Kuat Sinyal Alat Standart x 100%
% error = | � � ���� ��� �����−� � ���� ���
� � ���� ��� ����� | x 100%
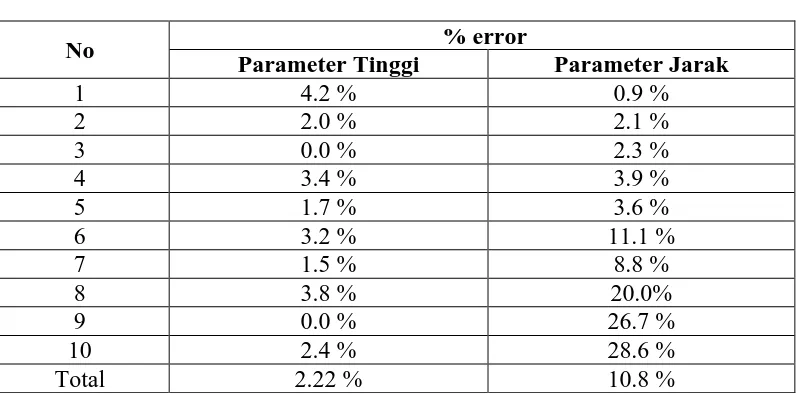
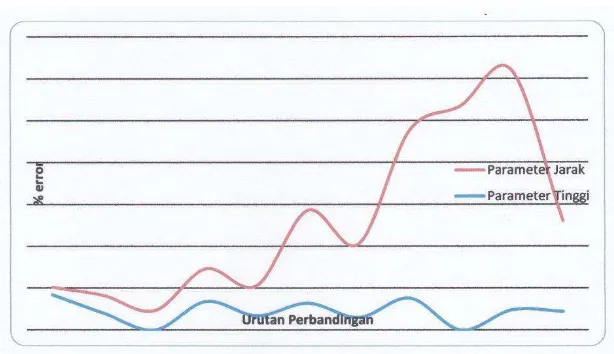
Adapun hasil analisa daya pancar tersebut ditunjukkan pada Tabel 4.3 berikut ini. Berdasarkan analisa daya pancar dijelaskan bahwa selisih rata-rata alat uji terhadap alat standart pada parameter ketinggian adalah sebesar 2.22 % sedangkan pada parameter jarak adalah sebesar 10.8 % dan pada jarak atau ketinggian tertentu hasil pembacaanya sebanding antara keduanya. Hal ini menunjukkan bahwa alat yang telah dirancang sudah sesuai dengan ketentuan yang berlaku.
Tabel 4.3 Analisa Daya Pancar Handy Talky
No % error
Parameter Tinggi Parameter Jarak
1 4.2 % 0.9 %
BAB 5
PENUTUP
5.1 Kesimpulan
1. Jarak dan ketinggian berpengaruh terhadap kuat sinyal yang diterima. 2. Mikrokontroler ATmega 8 memiliki kemampuan yang memenuhi syarat
untuk melakukan proses pengolahan data dalam pembuatan alat ukur kuat sinyal pemancar radio.
3. Perangkat yang telah dirancang mampu bekerja sesuai dengan penggunaan power meter yang sangat dibutuhkan pada saat sekarang ini. 4. Total rata-rata % kesalahan alat ukur uji terhadap alat ukur standart hanya sebesar 2.22 % pada parameter ketinggian dan 10.8 % pada parameter jarak.
5.2 Saran
1. Disarankan untuk melakukan pengujian terhadap stasiun pemancar radio yang ada di kota Medan.
2. Diharapkan alat yang telah dirancang dapat menjadi alternative alat ukur yang ekonomis untuk menjadi perangkat pembacaan kuat sinyal radio suatu pemancar.
3. Dapat dikembangkan menjadi perangkat monitoring kuat sinyal suatu pemancar radio.
BAB 2
LANDASAN TEORI
2.1 Dioda Germanium
Dioda adalah komponen aktif semikonduktir yang terdiri dari persambungan (junction) P-N. Sifat dioda yaitu dapat menghantarkan arus pada tegangan maju dan menghambat arus pada tegangan balik. Dioda berasal dari pendekatan kata dua elektroda yaitu anoda dan katoda. Dioda semikonduktor hanya melewatkan arus searah saja (forward), sehingga banyak digunakan sebagai komponen penyearah arus. Secara sederhana sebuah dioda bisa kita asumsikan sebuah katup, dimana katup tersebut akan terbuka manakala air yang mengalir dari belakang katup menuju kedepan, sedangkan katup akan menutup oleh dorongan aliran air dari depan katup.
Gambar 2.1 Spesifikasi Dioda Germanium Simbol Umum Dioda
Dioda disimbolkan dengan gambar anak panah yang pada ujungnya terdapat garis yang melintang. Simbol tersebut sebenarnya adalah sebagai perwakilan dari cara kerja dioda itu sendiri. Pada pangkal anak panah disebut juga sebagai anoda (kaki positif = P) dan pada ujung anak panah disebut sebagai katoda (kaki negatif = N). Fungsi Dioda antara lain sebagai berikut:
1. Sebagai penyearah, untuk dioda bridge.
2. Sebagai penstabil tegangan (voltage regulator), untuk dioda zener. 3. Pengaman/sekering.
4. Sebagai rangkaian clipper, yaitu untuk memangkas/membuang level sinya yang ada di atas atau dibawah level tegangan tertentu.
5. Sebagai rangkaian clamper, yaitu untuk menambahkan komponen DC kepada suatu sinya AC.
6. Sebagai pengganda tegangan.
7. Sebagai indikator, untuk LED (light emiting diode).
8. Sebagai sensor panas, contoh aplikasi pada rangkaian power amplifier. 9. Sebagai sensor cahaya, untuk dioda photo.
10. Sebagai rangkaian VCD (voltage controlled oscilator), untuk dioda varactor
2.2 Mikrokontroler
keluarga masing-masing mikrokontroler mempunyai spesifikasi tersendiri namun masih kompatibel dengan pemrogramannya.
Pada saat ini penggunaan mikrokontroler dapat kita temui pada berbagai peralatan, misalnya peralatan yang terdapat dirumah, seperti telepen digital, microwave oven, televisi, mesin cuci, sistem keamanan rumah, PDA, dll. Mikrokontroler dapat kita gunakan untuk berbagai aplikasi misalnya untuk pengendalian, otomasi industri, akusisi data, telekomunikasi dan lain-lain. Keuntungan menggunakan mikrokontroler yaitu harganya murah, dapat diprogram berulang kali, dan dapat kita program sesuai dengan keinginan kita. Saat ini keluarga mikrokontroler yang ada dipasaran yaitu Intel 8084 dan 8051 (MCS51), Motorola 68HC11, Micochip PIC, Hitachi H8, dan Atmel AVR.
2.2.1 Sejarah Mikrokontroler
Mikrokontroler dikembangkan dari mikroprosesor. Berikut ini sejarah perkembangan teknologi mikroprosesor dan mikrokontroler.
Tahun 1617, John Napier menemukan sistem untuk melakukan perkalian dan
pembagian berdasarkan logaritma.
Tahun 1694, Gottfriend Wilhelm Leibniz membuat mesin mekanik yang
dapat melakukan operasi +, -, *, /, dan akar kuadrat.
Tahun 1835, Charles Babbage mengusulkan computer digital pertama didunia
menggunakan punched card untuk data dan instruksi, serta program control dengan unit aritmatika dan unit penyimpanan.
Tahun 1850, George Boole, mengembangkan symbolic logic termasuk
Tahun 1946, Von Neuman menyarankan bahwa instruksi menjadi kode
numerik yang disimpan pada memori. Komputer dan semua desain mikrokontroler didasarkan pada komputer Von Neuman.
Tahun 1948, Transistor ditemukan. Dengan dikembangkannya konsep
software, pada tahun 1948 mulai adanya perkembangan hardware penting untuk transistor.
Tahun 1959, IC (Integrated Circuit) pertama dibuat.
Tahun 1971, Intel 4004 dibuat, yang merupakan Mikroprosesor pertama.
Terdiri dari 2250 transistor. Kemudian intel membuat Intel 8008, mikroprosesor 8 bit. Semakin besar ukuran bit berarti mikroprosesor dapat memproses lebih banyak data.
Tahun 1972, TMS 1000, buatan Texa Instrumen, Mikrokontroler pertama
yang dibuat.
Tahun 1974, beberapa pabrikan IC menawarkan mikroprosesor dan
pengendalian menggunakan mikroprosesor yang ditawarkan pada saat itu yaitu 8080, 8085, Motorola 6800, signetic 6502, Zilog z80, dan Texas Instrumens 9900 (16 bit).
Tahun 1978, mikroprosesor 16 bit menjadi lebih umum digunakan yaitu Intel
2.2.2 Mikrokontroler ATMEG 8
Atmega 8 adalah low power mikrokontroler 8 bit dengan arsitektur RISC. Mikrokontroler ini dapat mengeksekusi perintah dalam satu periode clock untuk setiap instruksi. Berikut ini adalah contoh gambar Atmega 8 yang terdapat pada gambar 2.3 dibawah ini.
Gambar 2.3 AT MEGA 8
Mikrokontroler ini diproduksi oleh atmel dari seri AVR. Untuk seri AVR ini banyak jenisnya, yaitu Atmega 8, Atmega 8535, Mega 8515, Mega 16, dan lain-lain. Mikrokontroler Atmega 8 ini sangat murah dan mempunyai fasilitas yang sangat memadai untuk mengembangkan berbagai aplikasi.
Keuntungan lainnya dalam menggunakan ATMEGA 8 ini, jika ada perubahan cara kerja sistem maka kita tidak perlu merubah rangkaiannya, tetapi hanya dengan merubah program-program yang lama dengan memasukkan program-program atau instruksi yang baru.
2.2.3 Fitur ATMEGA 8
Beberapa fitur dari Atmega 8 adalah sebagai berikut:
1. Mikrokontroler AVR 8 bit yang memiliki kemampuan tinggi, dengan daya rendah.
3. Memiliki kapasitas Flash Program 8 Kbyte, EEPROM 512 Byte dan SRAM 1 Kbyte.
4. Saluran I/O sebanyak 22 buah yaitu Port B, Port C, dan Port D. 5. CPU yang terdiri dari 22 register.
6. Unit interupsi internal dan eksternal. 7. Port USART untuk komunikasi serial. 8. Fitur Peripheral
Tiga buah Timer/Counter dengan kemampuan perbandingan
- 2 (dua) buah Timer/Counter 8 bit dengan Presculer terpisah dan Mode Compare.
- 1 (satu) buah Timer/Counter 16 bit dengan Presculer terpisah dan Mode Compare, dan Mode Capture.
Real Time Counter dengan Oscilator tersendiri.
4 chanel PWM.
8 chanel, 10 bit ADC.
Byte-oriented Two-wire Serial Interface
Programmable Serial USART.
Antarmuka SPI.
Whatchdog Timer dengan oscilator internal.
2.2.4 Pin AVR ATMEGA 8
Kaki (pin) Atmega 8 dapat dilihat pada gambar 2.4 dibawah ini :
Gambar 2.4 Kaki (pin) ATMEGA 8
ATmega 8 memiliki 28 pin, yang masing-masing pinnya memiliki fungsi yang berbeda-beda baik sebagai port maupun sebagai fungsi lainnya. Berikut akan dijelaskan fungsi dari masing kaki ATmega 8.
1. VCC merupakan pin yang berfungsi sebagai masukan catu daya. 2. GND merupakan pin Ground.
3. Port B (PB7...PB0)
rangkaian clock internal, bergantung pada pengaturan Fuse bit yang digunakan untuk memilih sumber clock. Sedangkan untuk PB7 dapat digunakan sebagai output Kristal (output oscillator amplifier) bergantung pada pengaturan Fuse
bit yang digunakan untuk memilih sumber clock. Jika sumber clock yang dapat dipilih oscillator internal, PB7 dan PB6 dapat digunakan sebagai I/O atau jika menggunakan Asyncronous Timer/Counter 2 PB6 dan PB7 (TOSC2 dan TOSC1) digunakan untuk saluran input timer. Fungsi-fungsi Port B dapat dilihat lebih mudah seperti pada table di bawah ini :
Table 2.1 Fungsi Khusus Port B
Pin Fungsi Khusus
PB7 Merupakan pin masukan clock eksternal TOSC1 (Timer Oscillator Pin 1) PB6 Merupakan pin masukan clock eksternal TOSC2 (Timer Oscillator Pin 2) PB5 SCK (SPI Bus Serial Clock)
PB4 MISO (SPI Bus Master Input / Slave Output) PB3 MOSI (SPI Bus Master Output /Slave Output)
OC2 (Timer/ Counter 2 Output Compare Match Output) PB2 ŜŜ (SPI Slave Select Input)
OCI B (Timer/Counter 1 Output Compare B Match Output) PB1 OCI A (Timer/Counter 1 Output Compare A Match Output) PB0 ICP (Timer/Counter 1 Input Coapture Pin)
4. Port C (PC6….PC0)
dengan pin-pin yang terdapat port C lainnya. Namun jika RSTDISBL Fuse tidak diprogram, maka pin ini akan berfungsi sebagai input reset. Dan jika level tegangan yang masuk ke pin ini rendah dan pulsa yang ada lebih pendek
dari pulsa minimum, maka akan menghasilkan suatu kondisi reset meskipun clock-nya tidak berkerja.
5. Port D (PD7…PD0)
Port D merupakan 8-bit bi- directional I/O dengan Internal pull-up resistor. Fungsi dari port ini sama dengan port-port yang lain. Hanya saja pada port ini tidak terdapat kegunaan-kegunaan yang lain. Pada portini hanya berfungsi sebagai masukan dan keluaran saja atau biasa disebut dengan I/O. Fungsi-fungsi Port D dapat dilihat lebih mudah seperti pada table di bawah ini :
Table 2.2 Fungsi Khusus Port B
Pin Fungsi Khusus
PD7 AIN1 (Analog Comparator Negative Input) PD6 AIN0 (Analog Comparator Positive Input) PD5 T1 (Timer/Counter 1 External Counter Input) PD4 XCK (USART External Clock Input/Output)
T0 (Timer/ Counter 0 External Counter Input) PD3 INT 1 (External Interrupt 1 Input)
PD2 INT 0 (External Interrupt 0 Input) PD1 TXD (USART Output Pin)
PD0 RXD (USART Input Pin)
6. AVcc
disarankan untuk menghubungkannya secara terpisah dengan VCC. Jika ADC digunakan, maka AVcc harus dihubungkan ke VCC melalui low pass filter. 7. AREF
Merupakan pin masukan tegangan referensi ADC.
2.2.5 Blok Diagram ATMEGA 8
2.2.6 Arsitektur Mikrokontroler AVR RISC
Gambar 2.6 Arsitektur Mikrokontroler AVR RISC
Dari gambar diatas AVR, menggunakan arsitektur Harvard dengan memisahkan antara memori dan bus untuk program dan data untuk menghasilkan kemampuan dan kecepatan. Instruksi dalam memori program dieksekusi dengan pipelining single level. Dimana ketika satu instruksi dieksekusi, intruksi berikutnya diambil dari dari memori program. Konsep ini mengakibatkan instruksi dieksekusi setiap clock cycle. CPU terdiri dari 32 x 8 bit purpose register yang dapat diakses dengan cepat dalam satu clock cycle, yang mengakibatkan operasi Arithmetic Logic Unit (ALU) dapat dilakukan dalam satu cycle. Pada operasi ALU, dua operand berasal dari regester, kemudian operasi dieksekusi dan hasilnya disimpan kembali pada regester dalam satu clock cycle. Operasi aritmatika dan logic pada ALU akan mengubah bit-bit yang terdapat pada Status Register (SREG). Proses pengambilan instruksi dan pengeksekusian instruksi berjalan secara parallel, dapat dilihat pada gambar dibawah ini :
Gambar 2.8 Proses pengambilan instruksi dan pengeksekusian instruksi secara pararel
Instruksi 1 : Fetching 1 Executing 1
Instruksi 2 : Fetching 2 Executing 2
2.2.7 General Purpose Register AVR
Gambar 2.10 General Purpose Register AVR
Gambar diatas menunjukkan struktur 32 general purpose register yang terdapat di dalam CPU, masing-masing register ditentukan juga dalam alamat memori data, dipetakan kedalam 32 lokasi pertama data user. Walaupun tidak secara fisik diimplementasikan sebagai lokasi SRAM, namun pengaturan ini memberikan flexsibilitas dalam mengakses register, seperti register pointer X, Y, dan Z dapat diset menuju index dari register file manapun.
2.2.8 Stack Pointer
Stack digunakan untuk menyimpan data sementara, untuk menyimpan variable local dan untuk menyimpan return address setelah interrupt dan
pemanggilan subrutin. Stack pointer selalu menunjukkan ke puncak stack. Stack diimplementasi mulai dari lokasi memori tertinggi ke lokasi memori terendah, sehingga perintah PUSH akan menurangi Stack Pointer.
2.2.9 Peta Memori AVR ATmega 8
Gambar 2.12 Peta Memori AVR ATmega 8
Memori atmega terbagi menjadi tiga yaitu : 1. Memori Flash
Memori flash Adalah memori ROM tempat kode-kode program berada. Kata flash menunjukkan jenis ROM yang dapat ditulis dan dihapus secara elektrik. Memori flash terbagi menjadi dua bagian yaitu bagian aplikasi dan bagian boot. Bagian aplikasi adalah bagian kode-kode program aplikasi berada. Bagian boot adalah bagian yang digunakan khusus untuk booting awal yang dapat diprogram untuk menulis bagian aplikasi tanpa melalui programmer/downloader, misalnya melalui USART.
2. Memori data
Memori data adalah memori RAM yang digunakan untuk keperluan program. Memori data terbagi menjadi empat yaitu: 32 GPR (General Purphose Register) adalah register khusus yang bertugas untuk membantu
assembler setiap instruksi harus melibatkan GPR. Dalam bahasa C biasanya digunakan untuk variabel global atau nilai baik fungsi dan nilai-nilai yang dapat memperingan kerja ALU. Dalam istilah processor komputer sehari-hari GPR dikenal sebagai “chace memory”, I/O register dan Aditional I/O register yang difungsikan khusus untuk mengendalikan berbagai pheripheral dalam mikrokontroler seperti pin port, timer/counter, usart dan lain-lain. Register ini dalam keluarga mikrokontroler MCS51 dikenal sebagai SFR (Special Function Register)
3. EEPROM
EEPROM adalah memori data yang dapat mengendap ketika chip mati (off), digunakan untuk keperluan penyimpanan data yang tahan terhadap
gangguan satu daya.
2.2.10 Status Register (SREG)
Pada AVR status register mengandung beberapa informasi mengenai hasil dari kebanyakan hasil eksekusi instruksi aritmatik. Informasi ini digunakan untuk altering arus program sebagai kegunaan untuk meningkatkan performa pengoperasian. Register ini di-update setelah operasi ALU (Arithmetic Logic Unit) hal tersebut seperti yang tertulis dalam datasheet khususnya pada bagian
setelah kembali dari interupsi. Namun hal tersebut harus dilakukan melalui software. Berikut adalah gambar status register.
Gambar 2.13 Status Register Atmega 8
Bit 7 (I)
Merupakan bit Global Interrupt Enable. Bitini harus di-set agar semua perintah interupsi dapat dijalankan. Untuk perintah interupsi individual akan di jelaskan pada bagian yang lain. Jika bit ini di-reset, maka semua perintah interupsi baik yang individual maupun yang secara umum akan di abaikan. Bit ini akan dibersihkan atau cleared oleh hardware setelah sebuah interupsi di jalankan dan akan set kembali oleh perintah RETI. Bit ini juga dapat di-set dan di-redi-set melalui aplikasi SEI dan CLL.
Bit 6(T)
Merupakan bit Copy Storage. Instruksi bit Copy Instructions BLD (Bit Load) and BST (Bit Store) menggunakan bit ini sebagai asal atau tujuan untuk bit yang telah dioperasikan. Sebuah bit dari sebuah register dalam RegisterFile dapat disalin ke dalam bit ini dengan menggunakan instruksi BST, dan sebuah bit di dalam bit ini dapat disalin ke dalam bit di dalam register pada Register File dengan menggunakan perintah BLD.
Bit 5 (H)
Bit 4 (S)
Merupakan Signbit. Bit ini selalu merupakan sebuah ekslusif di antara Negative Flag (N) dan two’s Complements Overflow Flag (V)
Bit 3 (V)
Merupakan bitTwo’s Complement Overflow Flag. Bit ini menyediakan fungsi aritmatika dua komplemen.
Bit 2 (N)
Merupakan bitNegative Flag. Bit ini mengindikasikan sebuah hasil negative di dalam sebuah fungsi logika atai aritmatika.
Bit 1(Z)
Merupakan bit Zero Flag. Bit ini mengindikasikan sebuah hasil nol “0” dalam sebuah fungsi aritmatika atau logika.
Bit 0 (C)
Merupakan bit Carry Flag. Bit ini mengindikasikan sebuah Carry atau sisa dalam sebuah aritmatika atau logika.
2.2.11 Timer/Counter 0
Timer/counter 0 adalah sebuah Timer/counter yang dapat mencacah
sumber pulsa/clock dari dalam chip (timer) ataupun dari luar chip (counter) dengan kapasitas 8-bit atau 256 cacahan. Timer/counter dapat digunakan untuk:
1. Timer/counter biasa
2. Clear timer on compare match (selain atmega 8) 3. Generator frekuensi (selain atmega 8)
2.2.12 Komunikasi Serial pada Atmega 8
Komunikasi serial merupakan komunikasi yang relative lambat dibandingkan dengan komunikasi parallel. Oleh karena itu, komunikasi serial sering melibatkan interupsi untuk mengetahui apakah pengiriman mampu menerima data yang telah selesai atau yang belum selesai dikirim.
Metode yang paling aman untuk proses pengiriman dan penerimaan saat serial adalah dengan menyediakan buffer untuk kedua proses tersebut. Data yang akan dikirim tidak secara langsung diberikan kepada SBUF, melainkan diberikan kepada buffer. Demikian juga dengan pengambilan data yang tidak langsung dari SBUF, melainkan diambil dari buffer, perpindahan keduanya diserahkan kepada prosedur dalam intrupsi serial.
Gambar 2.14 Blok USART
Clock generator
Clock generator berhubungan dengan kecepatan transfer data (baud rate) register yang bertugas menentukan baud rate adalah register pasangan.
USART transmiter
Usart transmiter berhubungan dengan data pada Pin TX. Perangkat yang sering digunakan seperti register UDR sebagai tempat penampungan data yang akan ditransmisikan. Flag TXC sebagai akibat dari data yang ditransmisikan telah sukses (complete), dan flag UDRE sebagai indikator jika UDR kosong dan siap untuk diisi data yang akan ditransmisikan lagi.
USART receiver
Usart receiver berhubungan dengan penerimaan data dari Pin RX. Perangkat
2.3 Analog to Digital Converter (ADC)
ADC adalah suatu alat yang mampu untuk mengubah sinyal atau tegangan analog menjadi informasi digital. Resolusi ADC selalu dinyatakan sebagai jumlah bit-bit dalam kode keluaran digitalnya. Misalnya, ADC dengan resolusi n-bit memiliki 2n kode digital yang mungkin dan berarti juga memiliki 2n step level. Jika resolusi ADC semakin tinggi, maka semakin banyak kemungkinan nilai-nilai analog yang bisa disajikan.Misalnya ADC dengan resolusi 8 bit menghasilkan bilangan 0 samapi 225 (256 bilangan 255 step), dengan demikian tidak mungkin
menyajikan semua kemungkinan nilai-nilai analog. Jika sekarang resolusinya menjadi 10 bit maka akan menghasilkan bilangan 0 dengan 1023 (1024 bilangan dan 1023 step).
VADC = � �� � �� x VREF
Nilai Digital = � x 256
Fitur-fitur pada arsitektur ADC mikrokontroler AVR adalah sebagai berikut :
Resolusi maksimum 10 bit (dapat dipilih resolusi 8 bit)
0.5 LSB Integral Non Linearity
Akurasi mutlak ± 2 LSB
Waktu konversi 13 – 260 µs
Pengambilan sampel sampai 15 kilo sampel per detik pada resolusi
maksimum
7 kanal masukan differensial dan 2 kanal masukan differential dengan opsi
penguatan 10 x dan 200x
Jangkauan tegangan masukan ADC 0-VCC
Tegangan refrensi 2,56 V internal yang dipilih
Mode konversi tunggal
Ada banyak cara yang dapat digunakan untuk mengubah sinyal analog menjadi sinyal digital yang nilainya proposional. Jenis ADC yang biasa digunakan dalam perancangan adalah jenis successive approximation convertion atau pendekatan bertingkat yang memiliki waktu konveksi jauh lebih singkat dan tidak tergantung pada nilai masukan analognya atau sinyal yang akan diubah. Diagram blok pengubah sinyak analog ke dalam digital ditunjukkan pada gambar 2.21 berikut ini :
Gambar 2.15 Diagram blok ADC
Prinsip kerja rangkaian pada gambar 2.21 tersebut adalah jika sinyal
masukan mulai konversi dari unit kendali diberi logika “0”, maka register SAR
DAC (Digital to Analog) menjadi nol. Pada waktu sinyal “mulai konversi” kembali menjadi tinggi operasi konversi segera dimulai.
Proses konversi diawali dengan pengesetan bit paling berarti (MSB) register SAR oleh kendali. Selanjutnya data digital dalam register SAR di konversi ke analog oleh DAC. Hasil konversi Vout oleh unit dibandingkan dengan sinyal masukan Vin oleh unit pembanding. Bila Vout lebih besar dari pada Vin maka unti pembanding akan mengirimkan sinyal negative ke unit kendali. Dengan adanya sinyal negative ini, unit kendali akan mereset bit paling berarti (MSB) register SAR. Sebaliknya, jika Vout lebih kecil dari Vin, unit pembanding akan mengirimkan sinyal positif ke unit kendali. Dengan sinyal positif ini, unit kendali tetap mengeset bit paling berarti (MSB).
Pada pulsa clock berikutnya uit terkendali akan mengeset bit yang lebig rendah yaitu bit ke 7 register SAR. Kemudian data dikonversikan oleh unit DAC dan hasil konversi Vout dibandingkan dengan sinyal masukan Vin. Sinyal hasil perbandingan akan menentukan unit kendali untuk mengeset dan mereset register SAR. Demikian proses ini berlangsung sampai diperoleh nilai Vin sama dengan nilai Vout . Apabila konversi telah selesai, unit kendali mengirimkan sinyal ‘selesai
konversi’ yang berlogika rendah.
2.4 Pemrograman Mikrokontroler Menggunakan Code Vision Avr
(Bahasa C)
pendidikan. Banyak varian dan type dari mikrokontroler yang dipelajari dan digunakan di dunia pendidikan.
Akar dari bahas C adalah dari bahasa BCPL yang dikembangkan oleh Martin Richhards pada tahun 1967. Bahasa ini memberikan ide kepada Ken Thompson yang kemudian mengembangkan bahasa yang disebut dengan B pada tahun 1970. Perkembangan selanjutnya dari bahasa B adalah bahasa C oleh Dennis Ricthie sekitar 1970-an di Bell Telephone Laboratories Inc (sekarang adala AT & T Bell Laboratories). Bahasa C pertama kali digunakan di computer Digital Equipment Corporation PDP-11 yang menggunakan system operasi UNIX.
C adalah bahasa yang standar, artinya satuan program yang tertulis dengan versi bahas C tertentu akan dapat dikoompilasi dengan versi bahasa C yang lain dengan sedikit modifikasi. Standar bahasa C yang asli adalah standar dari UNIX. Patokan standar UNIX ini diambil dari buku yang ditulis oleh Brian Kerninghan
dan Dennis Ritehiie yang berjudul “The C Programming Language”, diterbitkan
oleh Prentice Hall tahun 1978.
Beberapa alasan mengapa bahasa C banyak digunakan, diantaranya adalah sebagai berikut:
1. Bahasa C hampir tersedia di semua jenis komputer
2. Kode bahasa C sifatnya portable.
Aplikasi yangditulis dengan bahasa C untuk suatu computer tersebut dapat digunakan di computer lain hanya dengan modifikasi yang sedikit saja. 3. Bahasa C hanya menyediakan sedikit kata-kata kunci.
Semakin sedikit kata-kata kunci yang digunakan disuatu bahasa, semakin mudah bagi pemakai untuk mempelajari dan menggunakan bahasa tersebut.
4. Proses executable program bahasa Ctebih cepat.
Karena philosopi dari bahasa C yang menyediakan sedikit kata-kata kunci, maka konsekuensinya program hasil dari kompilasi bahasa C relativeakan lebih cepat prosesnya dibandingkan dengan hasil dari bahasa lain.
5. Dukungan pustaka yang banyak.
Telah disebut bahwa keandalan bahasa C dicapai dengan fungsi-fungsi pustakanya. Fungsi-fungsi pustaka ini disediakan oleh versi-versi bahasa C masing-masing atau dapat dibeli dari sumber yang lain.
6. C adalah bahasa yang terstruktur.
Bahasa. C mempunyai struktur yang baik sehingga mudah untuk dipahami. C disebut bahasa yang terstruktur karena menggunakan fungsi-fungsi sebagai program-program bagiannya.
7. Selain bahasa tingkat tinggi, C juga dianggap sebagai bahasa tingkat menengah.
perangkat lunak sistem diantaranya adalah sistem operasi, interpreter,compiler, bahasa perakit, bahasa pemrograman dan DBMS (Database Management System).
Untuk mempunyai kemapuan seperti ini, bahasa C menggunakan kemapuan bahasa tingkat tinggi dan bahasa tinggkat rendah yang menghasilkan bahasa tingkat menengah. Sebagai bahasa tingkat menengah,C menyediakan kemampuan seperti yang disediakan oleh bahasa perakitan untuk operasi-operasi bit,byte, alamat-alamat memori, register, BIOS (Basic Input Ouput System), DOS (DiskOperating System) dan lain sebagainya.
8. Bahasa C adalah compiler.
Karena bahasa C sifatnya adalah compiler, maka akan menghasilkan executable program yang banyak dibutuhkan oleh program-program komersial.
beberapa fitur untuk mengambil kelebihan khusus dari arsitektur AVR dan kebutuhan dari sistem embedded.
CodeVisionAVR juga mempunyai Automatic Program Generator bernama CodeWizardAVR, yang mengizinkan anda untukmenulis, dalam hitungan menit, semua instruksi yang diperlukan untuk membuat beberapa fungsi-fungsi tertentu. Dengan fasilitas ini mempermudah para Programmer pemula untuk belajar pemograman mikrokontroler menggunakan CVAVR. Seperti aplikasi IDE lainnya, CodeVision AVR dilengkapi dengan sourcecode editor, compiler, linker, dan dapat memanggil Atmel AVR Studio untuk debugger nya.
Untukmemulai menjalankan CodeVision, buka program CodeVision melalui menu Start/All Program/CodeVision/GodeVision AVR C Compiler atau melalui desktop klik lambang codevision.
2.5 SOFTWARE DESAIN PCB (Printed Circuit Board) Proteus Profesional
7.7 SP2 Pro
Proteus professional merupakan kelompok software yang digunakan untuk membantu para desainer dalam merancang dan mensimulasikan suatu rangkaian elektronika. Software ini memiliki dua fungsi sekaligus dalam satu paket, paket yang pertama sebagai software untuk menggambar skematik dan dapat disimulasikan yang diberi nama ISIS. Paket kedua digunakan sebagai merancang gambar Printed CircuitsBoard (PCB) yangdiberi nama ARES. Secara langsung, pengubahan dari skematik ke PCB dapat dilakukan dalam software Proteus Prof 7.7 ini.
2.5.1 Fungsi Tiap Fitur Proteus Prof 7.7
Center at Cursor Zoom in
Zoom out
Zoom to view sheet Zoom to area
Membuat area tengah tampilan gambar dengan bertumpu pada cursor
Memperbesar gambar Memperkecil gambar
Menampilkan keseluruhan gambar Memperbesar gambar dengan memilih area yang dikehendaki
Mini View Menampilkan gambar dalam bentuk
tampilan kecil seluruh area gambar Component List Daftar komponen yang telah diuambil
dari Library
Pick From Library Mengambil komponen pada library yang akan diletakkan pada component list Mengambil dan menggunakan terminal yang dibutuhkan dalam rangkaian (VCC, Gnd, Input, Output).
Memilih pembangkit pulsa yang akan digunakan.
Terminal dengan tampilan nilai dari jalur koneksi komponen dengan menampilkan besaran tegangan
Terminal dengan tampilan nilai dari jalur koneksi komponen dengan menampilkan besaran arus.
Mengambil alat ukur yang akan digunakan (CRO, Volmeter, Ampere meter, AFG, Signal Analyyzer).
Drawing Tool and Text meliputi 2D Graphic line Mode
2D Graphic box Mode 2D Graphic Circle Mode 2D Graphic Arc Mode 2D Graphic Text Mode
Membuat garis jalur rangkaian 2D Membuat gambar kotak atau persegi 2D pada area gambar.
Membuat gambar lingkaran 2D area gambar.
Membuat gambar Arc atau garis lengkung 2D pada area gambar.
Menambahkan tulisan text 2D pada area gambar.
Rotate and Mirror Rotate Clockwise Rotate anticlockwise
Merotasi obyek searah jarum jam
X Mirror Y Mirror
Mencerminkan obyek kearah X Mencerminkan obyek kearah Y Play and Simulation Operaion
Play Step Pause Stop
Menjalankan simulasi rangkaian yang telah dibuat
Menjalankan simulasi secara tahap pertahap
BAB I
PENDAHULUAN
1.1 Latar Belakang
Kemajuan teknologi saat ini semakin meningkat berikut dalam penggunaan gelombang elektromagnetik dalam kehidupan sehari-hari.
Seperti apakah gelombang, apa contoh gelombang elektromagnetika itu? Gelombang elektromagnetik sebenarnya selalu ada disekitar kita, salah satu contohnya adalah sinar matahari, gelombang ini tidak memerlukan medium perantara dalam perantaraannya. Contoh lain adalah gelombang radio.
Tetapi spektrum gelombang elektromagnetik masih terdiri dari berbagai jenis gelombang lainnya, yang dibedakan berdasarkan frekuensi atau panjang gelombangnya. Untuk itu disini kita akan mempelajari tentang rentang spektrum gelombang elektromagnetik. Karakter khusus masing-masing gelombang elektromagnetik di dalam spektrum dan contoh dan penerapan masing-masong gelombang elektromagnetik dalam kehidupan sehari-hari.
1.2 Rumusan Masalah
1. Bagaimana cara merancang alat ukur kuat sinyal radio pemancar dengan dioda germanium dan Mikrokontroler At mega 8.
3. Menggunakan Software Code Vision AVR untuk melakukan pemrograman alat ukur kuat sinyal radio pemancar.
4. Menganalisa rangkaian alat ukur kuat sinyal radio pemancar yang telah dirancang berdasarkan skematik yang telah dibuat.
1.3 Batasan Masalah
1. Menjelaskan bagaimana prinsip kerja diode germanium.
2. Menggunakan prinsip Band Pass Filter (BPF) pada kapasitor By Pass.
3. Membutuhkan Dioda Germanium yang tepat untuk memeriksa sinyal yang diterima.
4. Pengujian dilakukan di beberapa stasiun radio kota Medan.
1.4 Tujuan Penelitian
1. Membangun kuat sinyal radio pemancar dengan dioda germanium dan mikrokontroler atmega 8
2. Mengetahui faktor-faktor yang menyebabkan perbedaan kualitas kuat sinyal radio pemancar dari beberapa stasiun radio yang telah diuji.
3. Memperoleh kesimpulan mengenai pengaruh yang timbul akibat perbedaan kuat sinyal radio pemancar.
4. Menentukan kuat sinyal radio pemancar yang sesuai dengan persyaratan yang telah ditentukan.
1.5 Metode Penelitian
1. Studi pustaka
Penulisan mengumpulkan data dan teori yang dibutuhkan dalam penulisan tugas akhir melalui buku-buku dan referensi lainnya yang berkaitan dengan tugas akhir.
2. Lembar data (Datasheet) komponen yang dipakai pada alat
Lembar data (Datasheet) merupakan data-data yang dikeluarkan oleh produsen komponen elektronika mengenai fungsi, karakteristik dan data-data penting lainnya tentang komponen hasil produksi dari produsen komponen elektronika yang bersangkutan.
3. Persiapan pembuatan konsep alat ukur.
Merupakan suatu tahap awal dalam merumuskan masalah dan membuat rancangan konsep dalam menyelesaikan suatu masalah. Bentuknya adalah konsep tertulis dan tergambarkan dalam bentuk diagram blok.
4. Perancangan dan pembuatan alat ukur
Proses merancang desain dan bentuk alat ukur sampai membuat alat ukurnya. 5. Menguji mekanik dan elektronik dari alat ukur
Merupakan tahap menguji mekanik dan elektronik dari alat ukur, untuk dilanjutkan agar dapat melakukan pemrograman.
6. Proses pembuatan pemrograman. 7. Uji tahap awal.
8. Mengkalibrasi alat ukur.
1.6 Sistematika Penulisan
BAB I PENDAHULUAN
Berisi judul latar belakang permasalahan, rumusan masalah, batasan masalah, tujuan pembahasan, metodologi pembahasan, sistematika penulisan dan relevansi dari penulisan tugas akhir ini.
BAB II LANDASAN TEORI
Dalam bab ini dijelaskan tentang teori pendukung yang digunakan untuk pembahasan dan cara kerja dari rangkaian teori pendukung itu antara lain Mikrokontroler At mega 8, diode germanoium, program yang dipergunakan serta cara kerja dari mikrokontroler At mega 8 dan komponen pendukung.
BAB III PERANCANGAN SISTEM
Membahas tentang perencanaan dan pembuatan sistem secara keseluruhan.
BAB IV PENGUJIAN RANGKAIAN
Berisi tentang uji coba alat yang telah dibuat, pengoperasian dan spsifikasi alat dan lain-lain.
BAB V KESIMPULAN DAN SARAN
RANCANG BANGUN KUAT SINYAL RADIO PEMANCAR
DENGAN DIODA GERMANIUM DAN MIKROKONTROLER
ATMEGA 8
ABSTRACT
In this thesis it has arranged and made a system to measure radio signal currents. The system based on micro controller as data
Next we can see the measurement result on the LCD.
RANCANG BANGUN KUAT SINYAL RADIO PEMANCAR
DENGAN DIODA GERMANIUM DAN MIKROKONTROLER
ATMEGA 8
ABSTRAK
Dalam tugas akhir ini telah dirancang dan dibuat suatu sistem untuk mengukur kuat sinyal radio. Sistem tersebut bebasis pada mikrokontroler sebagai pengolah data. Selanjutnya hasil pengukuran ditampilkan pada sebuah layar LCD.
Untuk dapat mengetahui informasi mengenai kuat sinyal radio, maka dibutuhkan suatu sistem perangkat keras pengukuran yang dilengkapi dengan perangkat lunak. Perangkat keras yang digunakan yaitu rangkaian dioda germanium dan mikrokontroler atmega 8, kemudian mengkonversikannya menjadi tegangan. Rangkaian ADC ( Analog to Digital Converter ) untuk mengubah tegangan analog yang ditangkap, untuk menjadi data pengukuran digital. Sistem mikrokontroler untuk mengelolah dan mengkalibrasi data hasil pengukuran tersebut ditampilkan pada layar LCD ( Liquid Crstal Display ).
TUGAS AKHIR
RANCANG BANGUN KUAT SINYAL RADIO PEMANCAR
DENGAN DIODA GERMANIUM & MIKROKONTROLER
AT MEGA 8
Oleh:
ISMAIL
s
SEMBIRING
122411009
PROGRAM STUDI D-3 METROLOGI DAN INSTRUMEN
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN
UNIVERSITAS SUMATERA UTARA
RANCANG BANGUN KUAT SINYAL RADIO PEMANCAR
DENGAN DIODA GERMANIUM & MIKROKONTROLER
AT MEGA 8
TUGAS AKHIR
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh Ahli Madya
ISMAIL
s
SEMBIRING
122411009
PROGRAM STUDI D-3 METROLOGI DAN INSTRUMEN
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN
UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : Rancang Bangun Kuat Sinyal Radio Pemancar Dengan Dioda Germanium Dan Atmega 8
Kategori : Projek Akhir
Nama : Ismail S sembiring.
Nomor Induk Mahasiswa : 122411009
Program Studi : Diploma (D3) Metrologi dan Instrumentasi
Departemen : Fisika
Fakultas : Matematika Dan Ilmu Pengetahuan Alam Universitas Sumatera Utara
Disetujui di Medan, Junii 2016
Disetujui Oleh
Jurusan D3 Metrologi dan Instrumentasi FMIPA USU
Ketua, Pembimbing,
Dr. Diana Alemin Barus, M.Sc Dr. Bisman P,M.EngSc
PERNYATAAN
RANCANG BANGUN KUAT SINYAL RADIO PEMANCAR
DENGAN DIODA GERMANIUM DAN MIKROKONTROLER
ATMEGA 8
PROJEK AKHIR
Saya mengakui bahwa laporan projek akhir 2 ini adalah hasil kerja saya sendiri. Kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Juni2016
PENGHARGAAN
Segala puji bagi Allah SWT, yang telah memberikan kesehatan, serta pertolongan kepada penulis, sehingga penulis dapat menyelesaikan tugas akhir ini. Barang siapa yang Allah beri petunjuk, maka tidak ada yang dapat menyesatkannya, dan barang siapa yang Allah sesatkan, maka tidak ada yang dapat memberinya petunjuk. Dan tak lupa salawat beriring salam penulis sampaikan kepada Nabi Besar Muhammad SAW, yang telah membawa ke dunia yang terang benderang ini.
Terimakasih kepada kedua orang tua tercinta, yaitu Anthoni Readi Barus dan Misriani yang telah membesarkan penulis. Semoga buah hatimu ini kelak menjadi orang yang berguna bagi ayah dan ibu serta masyarakat. Begitu juga kepada saudara-saudari tercinta Dicky Kurniawan, Alfisyahrina Febriani Barus dan Mustaqim Ramadhan Barus yang telah banyak membantu dan menyemangati penulis. Hanya Allah yang dapat membalas jasa-jasa kalian semua.
Selama masa perkuliahan sampai penyelesaian tugas akhir ini, penulis banyak memperoleh bimbingan dari berbagai pihak. Untuk itu penulis ucapkan terimakasih yang sebesar-besarnya kepada :
1. Bapak Dr. Bisman P,M.EngSc selaku Dosen Pembimbing yang telah meluangkan waktu selama penyusunan tugas akhir ini. Semoga ilmu yang penulis dapat berguna untuk penulis dan masyarakat. Semoga Allah membalas semua kebaikan beliau yang telah diberikan kepada penulis. 2. Ibu Dr.Diana Alemin Barus, M.Sc, selaku Ketua Program Studi Metrologi
dan Instrumentasi Fakultas Matematika Dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
3. Bapak Junedi Ginting, S.Si.,M.Si selaku Sekretaris Program Studi Metrologi dan Instrumentasi Fakultas Matematika Dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
5. Seluruh teman-teman DIII-Metrologi dan Instrumentasi yang telah mendukung dan membantu penulis menyelesaikan tugas akhir.
6. RCS Comunity.
7. Dan semua pihak yang telah membantu penulis namun tidak dapat disebutkan satuper satu.
Penulis menyadari sepenuhnya bahwa dalam pembuatan Tugas Akhir ini masih jauh dari kesempurnaan, untuk itu penulis mengharapkan kritik dan saran dari pembaca yang bersifat membangun dalam penyempurnaan Tugas Akhir ini.Semoga laporan ini menjadi ibadah yang baik bagi penulis dan menjadi ilmu yang bermanfaat bagi pembaca.
Amin Yaa Rabbal’alamin
Medan, Juni 2016 Hormat Kami,
RANCANG BANGUN KUAT SINYAL RADIO PEMANCAR
DENGAN DIODA GERMANIUM DAN MIKROKONTROLER
ATMEGA 8
ABSTRACT
In this thesis it has arranged and made a system to measure radio signal currents. The system based on micro controller as data
Next we can see the measurement result on the LCD.
RANCANG BANGUN KUAT SINYAL RADIO PEMANCAR
DENGAN DIODA GERMANIUM DAN MIKROKONTROLER
ATMEGA 8
ABSTRAK
Dalam tugas akhir ini telah dirancang dan dibuat suatu sistem untuk mengukur kuat sinyal radio. Sistem tersebut bebasis pada mikrokontroler sebagai pengolah data. Selanjutnya hasil pengukuran ditampilkan pada sebuah layar LCD.
Untuk dapat mengetahui informasi mengenai kuat sinyal radio, maka dibutuhkan suatu sistem perangkat keras pengukuran yang dilengkapi dengan perangkat lunak. Perangkat keras yang digunakan yaitu rangkaian dioda germanium dan mikrokontroler atmega 8, kemudian mengkonversikannya menjadi tegangan. Rangkaian ADC ( Analog to Digital Converter ) untuk mengubah tegangan analog yang ditangkap, untuk menjadi data pengukuran digital. Sistem mikrokontroler untuk mengelolah dan mengkalibrasi data hasil pengukuran tersebut ditampilkan pada layar LCD ( Liquid Crstal Display ).
DAFTAR ISI
1.4. Tujuan Penelitian ... 2
1.5. Metode Penulisan ... 3
1.6. Sistematika Penulisan ... 4
Bab 2. Landasan Teori 2.1.Dioda Germanium ... 5
2.2.Mikrokontroler ... 6
2.2.1. Sejarah Mikrokontroler ... 7
2.2.2. Mikrokontroler Atmega 8 ... 9
2.2.3. Fitur Atmega 8 ... 9
2.2.4. PinAVRAtmega8...11
2.2.5. BlokDiagramAtmega8...14
2.2.7. GeneralPurposeRegisterAVR...17
2.3.Analog To Digital Converter ( ADC ) ... .24
2.4.Pemrograman Mikrokontroler Menggunakan CodeVision AVR .... .26
2.5.Software Desain PCB ... .31
2.5.1. FungsiTiapFiturProteusProf7.7...32
Bab 3. Perancangan Alat Dan Program 3.1. Prinsip Kerja Alat ... 35
3.1.1. Blok Diagram dan Fungsinya... 35
3.2. Perangkat Keras ... 38
3.2.1. Mikrokontroler ... .38
3.2.2. Saklar ... 39
3.2.3.KonfigurasiDisplay LCD ... 39
3.2.4. ADC ... 40
3.3. Perangkat Lunak ... 40
Bab 4. Pengujian Rangkaian Dan Analisa Program 4.1. Hasil Rancangan Bangun ... 42
4.2. Hasil Pengujian Daya Pancar Handy Talky ... 42
4.3. Hasil Analisa Daya Pancar Handy Talky ... 45
Bab 5. Kesimpulan 5.1. Kesimpulan………...48
5.2 Saran ... 48
Daftar Pustaka ... 49