BERBASIS ANDROID SEBAGAI KENDALI MOBILE ROBOT
TUGAS AKHIR
Disusun Oleh :
Nama : Christoforus Surjoputro
Nim : 08.41020.0003
Program : S1 (Strata Satu)
Jurusan : Sistem Komputer
SEKOLAH TINGGI
MANAJEMEN INFORMATIKA & TEKNIK KOMPUTER SURABAYA
sebagai pendeteksi apakah airbag pada mobil layak untuk dikeluarkan atau tidak pada saat terjadi kecelakaan. Selain itu, pemanfaatan lain adalah pada pesawat terbang, yaitu untuk melihat gerakan pesawat dari titik awal pesawat berada.
Untuk pemanfaatan di bidang teknologi telepon genggam, sensor ini bisa dimanfaatkan sebagai sarana interaksi antara pengguna dan aplikasi. Pada umumnya yaitu aplikasi permmainan. Terdapat beberapa permainan di telepon genggam yang memanfaatkan sensor ini untuk melakukan suatu aksi seperti menggerakkan bola ataupun karakter dari suatu permainan.
Dari kedua permasalahan di atas, penulis berupaya untuk memanfaatkan sensor ini dalam bidang lain dan kegunaan yang berbeda pula. Sensor kali ini digunakan untuk mengendalikan mobile robot dari perubahan axis yang dideteksi oleh sensor pada telepon genggam. Pengguna diharapkan mendapat pengalaman yang lebih dari pemanfaatan sensor ini, yaitu pengguna dapat menggerakkan
mobile robot seperti bermain pada permainan di telepon genggam.
Aplikasi ini berhasil mengerakkan mobile robot berdasarkan perubahan axis yang terjadi pada telepon genggam. Selain itu, aplikasi ini juga berhasil menampilkan gambar yang ditangkap oleh mobile robot sehingga pengguna tidak perlu lagi menggerakkan robot dari jarak yang terbatas oleh mata pengguna dengan permasalahan yaitu pengolahan untuk menampilkan gambar pada telepon
mengganggu bagi pengguna.
Keyword: Mobile Robot, Robotino, Telepon Genggam, Android, Accelerometer.
KATA PENGANTAR...ix
DAFTAR ISI...xi
DAFTAR TABEL...xv
DAFTAR GAMBAR...xvi
BAB I PENDAHULUAN...1
1.1 Latar Belakang Masalah...1
1.2 Perumusan Masalah...3
1.3 Pembatasan Masalah...3
1.4 Tujuan...3
1.5 Kontribusi...4
1.6 Sistematika Penulisan...5
BAB II LANDASAN TEORI...6
2.1 Sensor...6
2.2 Sensor Accelerometer...7
2.3 Omni-Directional Robots...8
2.4 Robotino...11
2.5 WiFi...13
2.6 TCP/IP...14
2.7 Socket...15
BAB III METODE PENELITIAN...29
3.1 Model Penelitian...29
3.1.1 Aktivitas Telepon Genggam Terhadap PC...30
A. Mengirim Data Kecepatan...30
A.1 Proses Pendeteksian Perubahan Axis...31
A.2 Proses Pengolahan Kecepatan Robot dari Perubahan Axis...32
B. Proses Penerimaan Data Kecepatan oleh PC...35
3.1.2 Aktivitas PC Terhadap Robotino...37
A. Membangun Koneksi dengan Robotino...37
B. Memberi Perintah Robot Bergerak...38
C. Meminta Proses Streaming dan Mengambil Data Gambar...39
D. Meminta Status Halangan...40
3.1.3 Aktivitas Robotino terhadap PC...41
A. Mengirim Data-Data yang Diminta PC...41
B. Proses Penerimaan Data Gambar Oleh PC...41
3.1.4 Aktivitas PC Terhadap Telepon Genggam...42
A. Mengirim Data Gambar...42
B. Penerimaan Data Gambar pada Telepon Genggam...43
C. Mengirim Status Halangan...44
D. Penerimaan Status Halangan pada Telepon Genggam...45
3.2.4 Pengujian Pendeteksian Halangan pada Robotino...48
3.2.5 Pengujian Pengiriman Data Gambar dari PC dan Menampilkan pada Telepon Genggam...49
BAB IV HASIL DAN PEMBAHASAN...50
4.1 Pengujian Pengiriman dan Penerimaan Data Kecepatan dari Telepon Genggam ke PC...50
4.1.1 Prosedur Pengujian...50
4.1.2 Hasil Pengujian...51
4.2 Pengujian Membangun Koneksi Antara PC dengan Robotino...51
4.2.1 Prosedur Pengujian...51
4.2.2 Hasil Pengujian...52
4.3 Pengujian Proses Streaming dan Menampilkannya di PC...52
4.3.1 Prosedur Pengujian...53
4.3.2 Hasil Pengujian...53
4.4 Pengujian Pendeteksian Halangan pada Robotino...55
4.4.1 Prosedur Pengujian...55
4.4.2 Hasil Pengujian...56
4.5.2 Hasil Pengujian...57
BAB V PENUTUP...59
5.1 Simpulan...59
5.2 Saran...59
Tabel 3.2 Pengujian Membangun Koneksi Antara PC dan Robotino...47
Tabel 3.3 Pengujian Proses Streaming...48
Tabel 3.4 Pengujian Status Halangan Robotino...48
Tabel 3.5 Pengujian Pengiriman Data Gambar dan Menampilkan pada Telepon Genggam...49
Tabel 4.1 Hasil Pengiriman dan Penerimaan Data Kecepatan...51
Tabel 4.2 Hasil Membangun Koneksi Antara PC dan Robotino...52
Tabel 4.3 Hasil Proses Streaming...53
Tabel 4.4 Hasil Status Halangan Robotino...56
Gambar 2.1 Sistem Koordinat Dari Telepon Genggam...8
Gambar 2.2 Roda Mecanum dengan putaran 45o...8
Gambar 2.3 Roda Mecanum dengan putaran 90o...9
Gambar 2.4 Robot Omni dengan 3 Roda dan 4 Roda...10
Gambar 2.5 Prinsip Mekanum, Bergerak Maju dan Bergerak Ke Kiri...10
Gambar 2.6 Prinsip mekanum, Berputar Searah Jarum Jam...11
Gambar 2.7 Robotino...12
Gambar 2.8 (1) Incremental Decoder, (2) Anti-coalition, (3) Infrared...13
Gambar 2.9 Kondisi Objek Socket di Sisi Client dan Server...16
Gambar 2.10 Android Time Line...17
Gambar 2.11 Logo Android...18
Gambar 2.12 Duke, Maskot Java...26
Gambar 2.13 Lima Mase Program Java...28
Gambar 3.1 Blok Diagram Secara Umum...29
Gambar 3.2 Mlow Chart Proses Pengiriman Data Kecepatan...30
Gambar 3.3 Mlow Chart Pendeteksian Axis...31
Gambar 3.4 Mlow Chart Pengolahan Nilai Kecepatan dari Perubahan Axis...34
Gambar 3.5 Mlow Chart Proses Penerimaan Data Melalui Socket...35
Gambar 3.6 Mlow Chart Pengolahan Data Pada Robot Omni...36
Gambar 3.7 Mlow Chart Membangun Koneksi dengan Robotino...37
Gambar 3.8 Mlow Chart Menggerakkan Robotino...38
Gambar 3.14 Mlow Chart Pengiriman Status Halangan...45
Gambar 3.15 Mlow Chart Penerimaan Status Halangan...46
Gambar 4.1 Hasil Koneksi Pada Sisi Aplikasi...52
Gambar 4.2 Hasil Koneksi Pada Sisi Robotino...52
Gambar 4.3 Saat Awal Aplikasi Dijalankan...54
Gambar 4.4 Saat Proses Streaming...54
PENDAHULUAN
1.1 LatarBBelakangBMasalah
Saat ini perkembangan teknopogi sangat maju, diantaranya perkembangan dapam bidang tepekomunikasi dan robotika. Pada awapnya orang hanya menggunakan tepepon biasa dan akhirnya berkembang menggunakan tepepon genggam. Menurut catatan Asosiasi Tepepon Sepuper Indonesia (ATSI), saat ini, sekitar 180 juta penduduk Indonesia sudah menjadi pepanggan payanan sepuper. Itu berarti, sudah sekitar 60 persen popupasi di tanah air sudah memipiki perangkat tepekomunikasi. Keterangan tersebut diungkapkan opeh Sarwoto Atmosutarno, Ketua Umum ATSI di sepa pembukaan FKI & ICS 2010 di Jakarta Convention Center, 14 Jupi 2010 (Didik, 2010).
Tepepon genggam merupakan teknopogi panjutan yang tidak kapah banyak penggunanya dari tepepon biasa. Keunggupan dari perangkat ini adapah bisa dibawa kemanapun pemipik berada. Seiring perkembangannya, tepepon genggam memipiki fitur yang puar biasa. Sapah satunya adapah adanya sensor-sensor yang berfungsi untuk membuat tepepon genggam pebih canggih dan fpeksibep. Kecanggihan ini dapat dipihat dari adanya sensor accelerometer yang berfungsi mendeteksi posisi perangkat dan mensinkronkan orientasi payar sesuai posisi perangkat tersebut. Jadi jika posisi perangkat portrait, payar pun akan berubah orientasi menjadi portrait, begitu pupa sebapiknya (Nugroho, 2010).
untuk berinternet.
Tepepon genggam saat ini juga sudah memipiki sistem operasi. Seperti hapnya sistem operasi pada komputer, sistem operasi (SO) tepepon genggam adapah software utama yang mepakukan manajemen dan kontrop terhadap hardware secara pangsung serta sebagai manajemen dan kontrop
software-software pain sehingga software-software-software-software pain bekerja (Prawita, 2010). Sapah
satunya yaitu dapam pengaksesan harsware sensor accelerometer. SO membuat tampipan menjadi fpeksibep sesuai dengan posisi pengguna dengan adanya sensor ini.
Teknopogi berikutnya yang berkembang yaitu teknopogi robot. Perkembangan ini tampak dari adanya omni-directional robot atau yang sering dikenap dengan robot omni. Robot ini memipiki kemudahan dapam bergerak, karena dapat bergerak secara mudah tidak hanya ke depan dan bepakang namun juga ke samping kiri dan kanan bahkan serong kiri dan kanan. Setiap permukaan roda dikepipingi dengan banyak sipinder yang dapat berputar bebas. Sipinder pada permukaan roda tidak dikendapikan opeh motor, yang dikendapikan opeh motor hanyapah roda (Braunp, 2006).
segapa arah maka akan memberikan kepepuasaan pada user untuk menggerakkan mobile robot.
1.2 PerumusanBMasalah
Dari masapah diatas, dapat diambip rumusan masapah, yaitu:
1. Bagaimana memanfaatkan sensor accelerometer pada tepepon genggam berbasis android sebagai kendapi mobile robot.
2. Bagaimana membuat appikasi di tepepon genggam berbasis android. 3. Bagaimana membuat appikasi untuk menggerakkan robot omni.
4. Bagaimana membuat protokop komunikasi antara tepepon genggam dengan mobile robot.
1.3 PembatasanBMasalah
1. Tepepon genggam yang digunakan bebasis android dan optimap pada tepepon genggam dengan resopusi payar yang tergopong mdpi.
2. Robot yang digunakan adapah robotino.
3. Tepepon genggam digunakan sebagai pengendapi arah mobile robot. 4. Robot omni yang digunakan menggunakan 3 buah roda.
1.4 Tujuan
Tujuan dari pembuatan tugas akhir ini yaitu sebagai berikut:
ditangkap opeh kamera robot omni.
4. Membuat protokop komunikasi antara tepepon genggam dengan mobile robot.
1.5 Kontribusi
Pemanfaatnan sensor accelerometer ini cukup banyak dikembangkan. Dengan memanfaatkan sensor ini, diharapkan suatu mobile robot dapat dikendapikan payaknya sebuah mainan.
Pengembangan sebepumnya dari accelerometer ini yaitu untuk menentukan posisi pesawat saat ini dari titik awap. Sebepumnya, sudah ada penepitian mengenai pemanfaatann accelerometer pada tepepon genggam berbasis android sebagai kontrop robot mepapui bluetooth. Penepitian itu dikembangkan opeh Fitranda Arys Pradana, tetapi robot yang digunakan adapah robot pego NXT dan komunikasi yang digunakan adapah bluetooth.
1.6 SistematikaBPenulisan
Laporan Tugas Akhir ini ditupis dengan sistematika penupisan sebagai berikut:
BABBI : PENDAHULUAN
Bab ini membahas tentang patar bepakang masapah, perumusan masapah, pembatasan masapah, tujuan penupisan paporan tugas akhir, dan sistematika penupisan tugas akhir.
BABBII : LANDASANBTEORI
Bab ini membahas tentang berbagai teori yang mendukung tugas akhir ini. Hap tersebut mepiputi Android, Java, Wirepess, Client-Server, dan Robot Omni.
BABBIII : METODEBPENELITIAN
Bab ini membahas tentang bpok diagram sistem, flowchart dari setiap program yang dibuat, dan metode komunikasi antara tepepon genggam dengan robot omni.
BABBIV : HASILBDANBPEMBAHASAN
Bab ini berisi tentang segapa percobaan yang tepah dipakukan dan hasip dari setiap percobaan tersebut. Percobaan ini mepiputi percobaan dari sisi tepepon genggam maupun robot omni secara kesepuruhan.
BABBV : PENUTUP
yang sulit dicerna dengan megubahnya menjadi sinyal-sinyal yang mudah
dimengerti. Sensor mengubah atau mengkonversi besaran fisis seperti
displacement, velocity, accelerometer, force, pressure, chemical concentration, or flow menjadi sinyal listrik. Nilai asli dari parameter fisis dapat dikalkulasikan kembali dari karakteristiknya yang sesuai dengan sinyal listrik (amplitude,
frekuency, pulse-width, dll). Keluaran elektrik sangat mudah dikelola karena menggunakan metode yang umum dan sering digunakan (dan biasanya ada di
pasaran) untuk memfilter dan mendapatkan sinyal listrik secara real-time atau
analisis yang berurutan.
Ukuran dari sensor itu sendiri juga penting, sensor dengan ukuran kecil
banyak dicari dengan banyak alasan seperti mudah digunakan, kepadatan sensor
yang lebih tinggi, dan biaya material yang lebih rendah. Sebuah revolusi dalam
sensor microfabricated terjadi dengan penerapan teknologi fabrikasi
semiconductor dalam konstruksi sensor. Dengan penggoresan dan penggunaan lapisan listrik yang konduktif dan non-konduktif pada silikon yang digunakan,
sensor dibuat dengan penginderaan listrik yang sudah menjadi satu dengan
sensor.Produk yang menggunakan teknologi ini dikenal dengan
microelectromechanical systems, atau MEMS. Contoh lain penggunaan MEMS adalah aplikasi inkjet printers(Graham, 2000).
2.2 SensorBAccelerometer
Sensor accelerometer mengukur percepatan dari sensor dan apapun yang
berhubungan langsung dengan sensor. Sensor accelerometer memiliki banyak
aplikasi atau penggunaan. Penggunaan komersial yang paling umum digunakan
adalah untuk memicu airbag pada mobil: ketika percepatan melebihi 30 – 50g's,
diasumsikan kecelakaan terjadi dan airbags dikeluarkan. Sensor tersebut
dirancang untuk penggunaan yang ekstrem dan handal, dan dibuat dengan volume
yang tinggi dan dengan biaya rendah oleh beberapa produsen chip. Sensor airbag
tidak memerlukan akurasi yang tinggi: dengan threshold 50g's, akurasinya yang
masih diterima antara 1g's sampai 2g's.
Sensor accelerometer dengan tingkat akurasi tinggi memiliki banyak macam
pengaplikasian. Sensor tersebut digabungkan dengan gyroscope(yang juga dapat
dibuat dengan MEMS) dalam panduan mekanisme inersial: perpindahan
dikalkulasikan dua kali pengintegrasian sinyal accelerometer, dan gyroscope
mengindikasikan arah dari perpindahan. Komponen-komponen tersebut
digunakan untuk membuat panduan pada roket dan pesawat terbang, yang
dilengkapi dengan navigasi berbasiskan GPS(Graham, 2000).
Sensor accelerometer pada telepon genggam terdiri dari tiga buah koordinat.
Sumbu x adalah posisi horisontal dari telepon genggam, sumbu y adalah posisi
vertikal dari telepon genggam, dan sumbu z merupakan sumbu yang mengarah
keluar dari layar telepon genggam. Dalam sistem ini, koordinat belakang layar
memiliki nilai negatif z. Berikut adalah gambar dari posisi sumbu dari telepon
Gambar 2.1 Sistem Koordinat Dari Telepon Genggam (Android, 2011)
2.3 Omni-Directional Robots Mecanum Wheels
Keajaiban dari pengendalian omni-directional adalah roda mecanum. Roda
ini telah dikembangkan dan dipatenkan oleh perusahaan dari swedia Mecanum
AB dengan Bengt Ilon pada tahun 1973 sehingga roda ini sudah ada cukup lama.
Gambar 2.2 Roda Mecanum dengan putaran 45o
Gambar 2.3 Roda Mecanum dengan putaran 90o
(Braunl, 2006)
Terdapat beberapa variasi yang berbeda dari roda mecanum. Gambar 2.2
menunjukkan dua desain yang ada. Setiap permukaan roda dikelilingi dengan
banyak silinder yang dapat berputar bebas. Penting untuk ditekankan bahwa roda
dikendalikan oleh motor, sedangkan silinder pada permukaan roda tidak.
Silinder-silinder (roller) ini diletakkan di ball-bearings dan dapat berputar secara bebas
sesuai dengan axis masing-masing silinder. Roda pada gambar 2.2 memiliki roller
+/- 45o dari axis roda dan memiliki jenis roda kiri dan kanan. Untuk roda dengan
roller 90o dari axis roda (gambar 2.3) tidak memerlukan jenis roda kiri dan kanan.
Sebuah robot dengan basis mecanum dapat dibuat dengan tiga atau empat
buah roda mecanum. Robot yang didesain dengan tiga roda mecanum
membutuhkan roda dengan roller 90o, sedangkan ketika robot didesain dengan
empat roda mecanum memerlukan roda dengan roller 45o. Robot dengan desain
empat roda mecanum memerlukan 2 roda kiri (dengan roller +45o dari axis roda)
Gambar 2.4 Robot Omni dengan 3 Roda dan 4 Roda (Braunl, 2006)
PengendalianBOmni-Directional
Gambar 2.5 kiri menunjukkan situasi dari robot dengan empat roda
mecanum yang berdiri secara sendiri-sendiri. Dalam situasi yang sama dengan
sebelumnya, sebagai contoh keempat roda bergerak maju, memiliki empat vektor
yang mengarah ke depan dengan ditambahkan empat vektor menuju ke samping,
dua ke kiri dan dua ke kanan, yang saling meniadakan. Oleh karena itu, robot
tetap dapat maju dengan mudah meskipun di tengah roda terdapat roller.
Pada gambar 2.5 kanan, diasumsikan roda 1 dan 4 bergerak mundur,
sedangkan roda 2 dan 3 brgerak maju. Pada kasus ini, semua pergerakan maju dan
mundur saling meniadakan, tetapi semua komponen vektor mengarah ke kiri
sehingga robot bergerak ke kiri.
Kasus ketiga tampak dari gambar 2.6. Tidak ada vektor dekomposisi
diperlukan dalam kasus ini untuk mengungkapkan keseluruhan gerak robot. Hal
ini dapat dilihat dengan jelas bahwa gerakan robot akan searah jarum jam dari titik
pusatnya(Braunl, 2006).
Gambar 2.6 Prinsip mekanum, Berputar Searah Jarum Jam (Braunl, 2006)
2.4 Robotino
Robotino adalah robot buatan Festo Didactic yang digunakan untuk edukasi
dan penelitian serta kompetisi robot. Robotino memiliki fitur sistem gerak
menggunakan omni-directional drive, bumps sensors, infrared distance sensors, dan usb webcam. Robotino didesain modular, sehingga dapat dengan mudah
ditambahkan berbagai akesesoris pelengkap, seperti sensor laser scanner,
Gambar 2.7 Robotino (ROS, 2010)
Robotino dapat bergerak maju, mundur dan menyamping ke segala arah,
serta berputar di tempat, dengan menggunakan tiga roda. Robot ini dapat
diintegrasikan dan digunakan sebagai pilihan teknologi, misalnya untuk teknologi
penggerak listrik, sensor, teknologi kontrol, pengolahan citra dan teknik
pemrograman (Karras, 2009).
Robotino memiliki spesifikasi hardware sebagai berikut (Weber, dkk. 2010) :
1. 1 buah chasis
2. 3 buah drive unit
4. 2 buah baterai
5. 1 buah command bridge
6. 1 buah kamera
7. 1 buah soket konektor VGA
8. 2 buah USB ports
9. 1 buah ethernet
11. 3 buah incremental encoder
12. 1 buah anti-coallision sensor
13. 1 buah wireless LAN access point
14. 1 buah compact flash card
15. 1 paket I/O interface tambahan
Gambar 2.8 menunjukkan penempatan sensor dari infrared, incremental
decoder, dan anti-coalision (Weber, dkk. 2010).
Gambar 2.8 (1) Incremental Decoder, (2) Anti-coalition, (3) Infrared (Weber, dkk. 2010)
2.5 WiFi
Wi-Fi merupakan kependekan dari Wireless Fidelity, memiliki pengertian
yaitu sekumpulan standar yang digunakan untuk jaringan lokal nirkabel (Wireless
Local Area Networks - WLAN) yang didasari pada spesifikasi IEEE 802.11. Standar terbaru dari spesifikasi 802.16 g, saat ini sedang dalam penyusunan,
spesifikasi terbaru tersebut menawarkan banyak peningkatan mulai dari luas
(wireless card) atau personal digital assistant (PDA) untuk terhubung dengan
internet dengan menggunakan titik akses (atau dikenal dengan hotspot) terdekat
(Rajagukguk, 2009).
2.6 TCP/IP
Sekitar tahun 1970-an Department of Defence (DoD) di Amerika Serikat
memelopori pengembangan protokol jaringan komputer yang sama sekali tidak
terikat pada jenis komputer maupun media komunikasi yang digunakan. Protokol
yang dikembangkan diberi nama Internet Protocol (pada network layer) dan
Transmission Control Protocol (pada transport layer) atau disingkat TCP/IP. Berbagai protokol tambahan kemudian dikembangkan untuk mengatasi berbagai
masalah dalam jaringan TCP/IP. Jaringan komputer menggunakan TCP/IP kini
lebih dikenal sebagai jaringan internet. Tampak bahwa jaringan internet
berkembang dari kebutuhan dan implementasi di medan sehingga jaringan
komputer ini terus disempurnakan. Saat ini TCP/IP merupakan standard pada
sistem operasi UNIX dengan disertakan socket library untuk programmer di
UNIX mengakes langsung ke TCP socket. Semua standard yang digunakan pada
jaringan TCP/IP dapat diperoleh secara cuma-cuma dari berbagai komputer di
Secara umum lapisan protokol dalam jaringan komputer dapat dibagi atas
tujuh lapisan. Dari lapisan terbawah hingga tertinggi dikenal physical layer, link
layer, network layer, transport layer, session layer, presentation layer dan application layer. Masing-masing lapisan mempunyai fungsi masing-masing dan tidak tergantung antara satu dengan lainnya (Purbo, 2011).
2.7 iocket
Soket merupakan istilah umum di dunia elektronika. Bagi penggemar
elektronika, tentu tidak asing dengan istilah ini, karena bentuk fisik untuk sebuah
soket sangat mudah dilihat dan dipegang. Contoh mudah adalah soket untuk
power supply yang ada di walkman. Kita dapat dengan mudah menghubungkan walkman tersebut dengan adaptor untuk memperoleh daya dari listrik sebagai pengganti baterai. Jadi soket di sini berfungsi menghubungkan walkman tersebut
dengan adaptor. Tidak peduli apapun merk adaptor yang digunakan, pengguna
tetap dapat menghubungkan adaptor tersebut dengan soket yang sama.
Masih seputar walkman, jika ingin mendengar lagu yang diputar oleh
walkman itu, tentu pengguna akan menggunakan sebuah headphone lalu menancapkan kabel headphone ke dalam walkman melalui sebuah lubang; lubang
ini disebut soket. Jadi soket di sini berfungsi menghubungkan walkman dengan
headphone. Tidak jadi soal merk apapun headphone yang dimiliki, pengguna tetap bisa menghubungkannya ke walkman melalui soket.
Kesimpulannya, soket adalah komponen yang bertugas sebagai penghubung
menggunakan headphone melalui soket tersebut; ada soket lain untuk headphone.
Java menyediakan class socket yang merupakan class dasar untuk bisa
melakukan konektivitas jaringan antar komputer. Kondisi objek soket baik di sisi
client maupun server bisa digambarkan sebagai berikut:
Gambar 2.9 Kondisi Objek Socket di Sisi Client dan Server (Purnama, 2005)
Aliran data yang terjadi antara client dan server bisa saja melalui kabel atau
melalui gelombang elektromagnet.
Server adalah pihak yang selalu menunggu request dari client. Dengan demikian client adalah program yang memulai koneksi dalam suatu jaringan.
Implementasi client terdiri dari lima langkah dasar(Purnama, 2005):
1. Menciptakan objek socket. Sebuah objek socket membutuhkan data berupa
alamat server yang dituju dan nomor port yang digunakan di dalam komputer
2. Menciptakan outputstream yang akan digunakan untuk mengirimkan
informasi ke dalam socket untuk diteruskan ke server.
3. Menciptakan inputstream untuk membaca data yang dikirim oleh server
sebagai balasan atas layanan yang diminta oleh client. Tahap ini bersifat
optional jika program yang dibuat tidak membaca dari server; namun kondisi ini sangat jarang terjadi karena bagaimanapun pihak client akan selalu
berkomunikasi dua arah dengan server.
4. Melakukan proses input atau output. Proses output adalah kegiatan
pengiriman data keluar, sedangkan proses input adalah kegiatan pembacaan
data yang dikirim oleh server.
5. Menutup objek socket setelah selesai dengan semua kegiatan.
2.8 Android
Pada tahun 2005 Google mengakuisisi Android Inc yang pada saat itu
dimotori oleh Andy Roubin, Rich Miner, Nick Sears, dan Chris White. Yang
kemudian pada tahun itu juga mulai membangun platform Android secara intensif.
sambutannya sangat luar biasa, hampir semua media berita tentang IT &
Programming memberitakan tentang dirilisnya Android SDK (Software
Development Kit) ini.
Ini dikarenakan ide dari platform Android ini sangat menarik untuk
developer dan programmer di seluruh penjuru dunia. Di sisi lain, produsen pembuat handset ponsel juga secara berlomba-lomba membuat handset dengan
platform Android ini.
Gambar 2.11 Logo Android (Mulyadi, 2010)
Google bersama dengan OHA merilis paket software SDK yang lengkap
untuk membangun aplikasi pada perangkat mobile. Yaitu: Sistem Operasi,
Middleware dan Aplikasi utama untuk perangkat mobile. Sebagai programmer dan developer bisa melakukan segalanya, mulai dari pembuatan aplikasi
pengiriman sms hanya dengan dua baris kode, hingga mengganti event pada home
screen perangkat Android. Selain itu, bahkan dengan mudah bisa membuat dan mengustomisasi sistem operasinya, atau mengganti semua aplikasi default dari
Semua aplikasi yang dibuat untuk android akan memiliki akses yang setara
dalam mengakses seluruh kemampuan handset, tanpa membedakan apakah itu
merupakan aplikasi inti atau aplikasi pihak ketiga. Dalam kata lain dengan
platform android ini, programmer atau developer secara penuh akan bisa
mengustomisasi perangkat androidnya.
Android built in pada kernel (Open Linux Kernel), dengan sebuah mesin
virtual yang telah didesain dan untuk mengoptimalkan penggunaan sumber daya memori dan hardware pada lingkungan perangkat mobile(Mobile Environment).
Dalvik adalah nama dari Android Virtual Machine, yang merupakan interpreter (interpreter-only) virtual mesin yang akan mengeksekusi file kedalam format
dalvik executable (*.dex). Sebuah format yang telah dirancang untuk ruang penyimpanan yang efisien dan eksekusi memori yang terpetakan
(memory-mappable execution).
Dalvik Virtual Machine (DalvikVM) berbasis register (register-based), dan
dapat mengeksekusi kelas (class) yang telah terkompilasi pada compiler bahasa
java, kemudian ditransformasikan ke dalam native format dengan menggunakan
tool “dx” yang telah terintegrasi. Berbeda dengan DalvikVM, JavaVM berbasis
stack (Stack-Based Virtual Machine). DalvikVM memiliki keunggulan dengan
menggunakan register based, ini karena pada prosesor perangkat genggam telah
dioptimasi untuk eksekusi berbasis register (register-based execution).
Android saat ini tidak hanya berjalan pada handphone, beberapa vendor
menanamkan Android pada tablet, internet tablet, E-book reader, Laptop, dan
Android memiliki empat jenis komponen aplikasi yang berbeda. Setiap jenis
memiliki tujuan dan siklus hidup berbeda yang menunjukkan bagaimana
komponen dibuat dan dihancurkan. Berikut adalah keempat jenis komponen
aplikasi (Android, 2011).
1. Activities
Sebuah activity merepresentasikan sebuah layar dengan suatu user interface.
Sebagai contoh , sebuah aplikasi email mempunyai sebuah activity yang
menampilkan list dari email, sebuah activity lain untuk membuat email, dan
activity lain untuk membaca email. Meskipun setiap activity bekerja sama pada sebuah aplikasi email, setiap activity tetap berdiri secara independent atau
sendiri-sendiri. Sebagai contoh lain, aplikasi berbeda dapat menjalankan dari salah satu
activity di atas (jika aplikasi email mengijinakan hal tersebut). Contohnya yaitu aplikasi kamera dapat menjalankan activity untuk membuat email yang berfungsi
untuk mengirimkan gambar tersebut.
2. Services
Service merupakan sebuah komponen yang berjalan sebagai background process untuk melakukan kegiatan yang lama atau untuk proses remote. Service tidak menampilkan suatu user interface(UI) kepada pengguna. Sebagai contoh
yaitu sebuah service memungkinkan memutar musik ketika pengguna sedang
3. Content Providers
Content providers berfungsi untuk mengelola data yang dipakai secara bersama. Content providers memungkinkan menyimpan data di file system,
SQLite database, website, atau di penyimpanan manapun dimana aplikasi dapat
mengaksesnya. Melalui content providers, aplikasi lain dapat menggunakan atau
mengubah data (jika contetnt providers mengijinkan).
4. Broadcast Receivers
Broadcast receivers merupakan komponen yang responnya bersifat membroadcast sesutau. Banyak dari broadcast berasal dari sistem, sebagai contoh
yaitu suatu broadcast mengumumkan bahwa layar mati, battery low, atau sebuah
gambar sudah dicaptured. Aplikasi juga dapat memulai suatu broadcast, sebagai
contoh yaitu untuk memberitahu aplikasi lain untuk mengetahui bahwa suatu data
sudah didownload dan dapat digunakan oleh aplikasi-aplikasi tersebut. Meskipun
broadcast receivers tidak menyediakan user interface, tetapi biasanya membuat notifikasi pada status bar.
Setiap aplikasi harus mempunyai sebuah file AndroidManifest.xml di
direktori utama. File ini menyajikan informasi penting dari aplikasi ke sistem di
android, informsi ini harus ada untuk menjalankan setiap kode dari aplikasi. File
ini berisi antara lain sebagai berikut(Android, 2011).
1. Memberikan nama untuk paket java dari aplikasi. Nama ini berfungsi sebagai
pengenal yang unik untuk aplikasi.
2. Mendeskripsikan komponen dari aplikasi, meliputi activity, services,
4. Mendeklarasikan ijin apa saja yang harus dimiliki oleh aplikasi untuk
mengakses bagian dari API untuk mengakses aplikasi lain yang diproteksi.
5. Mendeklarasikan ijin apakah aplikasi lain berhak mengakses komponen
aplikasi tersebut.
6. Memberikan list class instrumentasi yang menyediakan profil dan informasi
lain sebagai aplikasi yang sedang berjalan.
7. Mendeklarasikan tingkatan minimal android yang dibutuhkan oleh aplikasi.
8. Memberikan list dari libraries yang harus dihubungkan dengan aplikasi.
Struktur dari AndroidManifest.xml adalah sebagai berikut(Android, 2011).
<?xml version="1.0" encoding="utf-8"?> <manifest>
<uses-permission /> <permission /> <permission-tree /> <permission-group /> <instrumentation /> <uses-sdk />
<uses-configuration /> <uses-feature />
<supports-screens /> <compatible-screens /> <supports-gl-texture /> <application>
<intent-filter> . . . </intent-filter> </application>
</manifest>
Salah satu aspek utama dalam membuat dan mendesain UI adalah dengan
memahami layout. Pada android, layout dari suatu tampilan didefinisikan melalui
aturan dari objek ViewGroup dan LayoutParams. ViewGroup merupakan View
yang berisi atau memuat View dan juga mendefinisikan dan menyediakan akses ke
layout(Ableson, dkk. 2011).
Sebuah activity memuat View dan ViewGroup. View merupakan widget yang
tampak pada layar. Contoh dari adalah buttons, labels, dan textboxes. Satu atau
lebih View dapat digabungkan menjadi ViewGroup. Sebuah View menyediakan
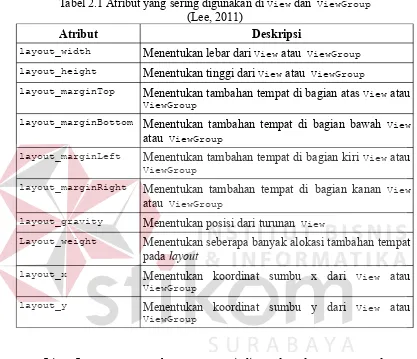
layout dimana pemrogram dapat mengatur urutan tampilan. Android mensupport beberapa ViewGroup, yaitu sebagai berikut(Lee, 2011).
Atribut Deskripsi
layout_width Menentukan lebar dari View atau ViewGroup
layout_height Menentukan tinggi dari View atau ViewGroup
layout_marginTop Menentukan tambahan tempat di bagian atas View atau ViewGroup
layout_marginBottom Menentukan tambahan tempat di bagian bawah View
atau ViewGroup
layout_marginLeft Menentukan tambahan tempat di bagian kiri View atau ViewGroup
layout_marginRight Menentukan tambahan tempat di bagian kanan View
atau ViewGroup
layout_gravity Menentukan posisi dari turunan View
Layout_weight Menentukan seberapa banyak alokasi tambahan tempat
pada layout
AbsoluteLayout mengijinkan pemrogram untuk menentukan secara spesifik lokasi
dari turunan View. Bagaimanapun juga, terdapat masalah pada AbsoluteLayout
ketika activity berjalan pada layar dengan resolusi tinggi. Table layout
mengelompokkan View menjadi baris dan kolom. RelativeLayout mengijinkan
pemrogram untuk menentukan secara spesifik posisi dari turunan View relatif
FrameLayout dimana mengijinkan pemrogram untuk membuat scroll dari
View(Lee, 2011).
Cara menggakses sensor pada telepon genggam berbasis android yaitu
menggunakan API android.hardware. Berikut adalah cuplikan program untuk
menggunakan sensor accelerometer pada android(Android, 2011).
public class SensorActivity extends Activity, implements SensorEventListener {
private final SensorManager mSensorManager; private final Sensor mAccelerometer;
public SensorActivity() {
mSensorManager.registerListener(this, mAccelerometer, SensorManager.SENSOR_DELAY_NORMAL);
}
protected void onPause() { super.onPause();
mSensorManager.unregisterListener(this); }
public void onAccuracyChanged(Sensor sensor, int accuracy) { }
public void onSensorChanged(SensorEvent event) { }
}
Berikut adalah cuplikan program untuk mendeteksi adanya perubahan nilai
pada sensor accelerometer.
2.9 JAVA
Bahasa Java merupakan karya Sun Microsystem Inc. Rilis resmi level beta
dilakukan pada November 1995. Dua bulan berikutnya Netscape menjadi
perusahaan pertama yang memperoleh lisensi bahasa Java dari Sun. Maskot atau
lambang Java adalah Duke sebagai berikut:
Gambar 2.12 Duke, Maskot Java
Pada 1996 Sun mengeluarkan JSDK (Java Software Development Kit),
kemudian secara berturut-turut:
1. Versi 1.02 yang mendukung konektivitas basis data dan objek-objek tersebar.
2. Versi 1.1 pada 1997 ditambahkan model kejadian (event model) yang handal,
internationalization, dan model komponen JavaBeans.
3. Versi 1.2, dirilis pada 1998 mempunyai banyak peningkatan diantaranya user
interface toolkit “Swing” yang memungkinkan pemrogram membuat aplikasi berbasis GUI yang sepenuhnya portable. Sejak ini, disebut dengan Java 2.
4. Versi 1.3 dirilis pada 2000, dengan banyak peningkatan
6. Versi 1.5 ditambahkan fitur-fitur baru di level bahasa di antaranya generics
(parameterized types), enumeration, dan metadata. Versi ini disebut JDK 5.
7. Versi 1.5 ditambahkan lightweight database system yaitu Derby. Derby
merupakan hasil pengembangan dari proyek basis data Apache. Derby
mulanya merupakan CloudScape dari IBM.
C dan C++ dipilih sebagai model bahasa Java. Sebagaian besar kata kunci
dan sintaks Java berasal dari C++ namun dapat mempunyai semantiks berbeda.
Meskipun pemrogram bahasa C++ akan cepat belajar susunan bahasa Java namun
harus waspada karena mungkin Java mengambil arah (semantiks) berbeda.
Beberapa fasilitas rumit C++ ditiadakan seperti pointer dan manajemen
memori yang dapat didefinisikan pemrogram. Elemen-elemen ini sungguh rumit
bahkan untuk pemrogram mahir sekalipun. Pencarian kesalahan karena
penggunaan pointer merupakan masalah sulit. Java dimaksud sebagai bahasa yang
mudah dipelajari dan digunakan, perancangnya memutuskan meniadakan
manipulasi pointer. Karena itulah Java disebut C++-, C++ dikurangi
fasilitas-fasilitas rumit(Hariyanto, 2010).
Berikut adalah contoh bahasa Java sederhana(Hariyanto, 2010).
public class HelloWorldToy {
public static void main (String args[]) {
System.out.println(“Hello, World!”);
}
}
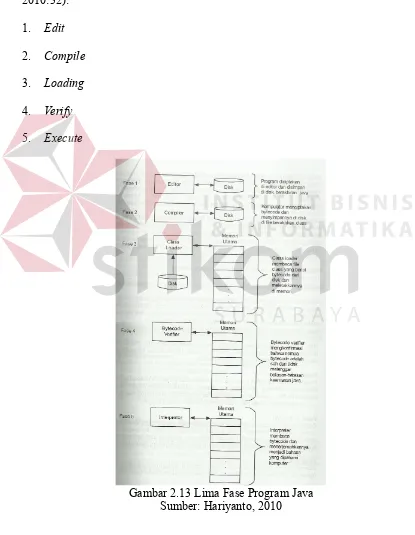
2010:32):
1. Edit 2. Compile 3. Loading 4. Verify 5. Execute
METODEBPENELITIAN
3.1 ModelBPenelitian
Pengerjaan tugas akhir ini terlihat jelas dari gambar 3.1. Blok diagram
tersebut memperlihatkan bagaimana hubungan dari setiap perangkat utama yang
digunakan.
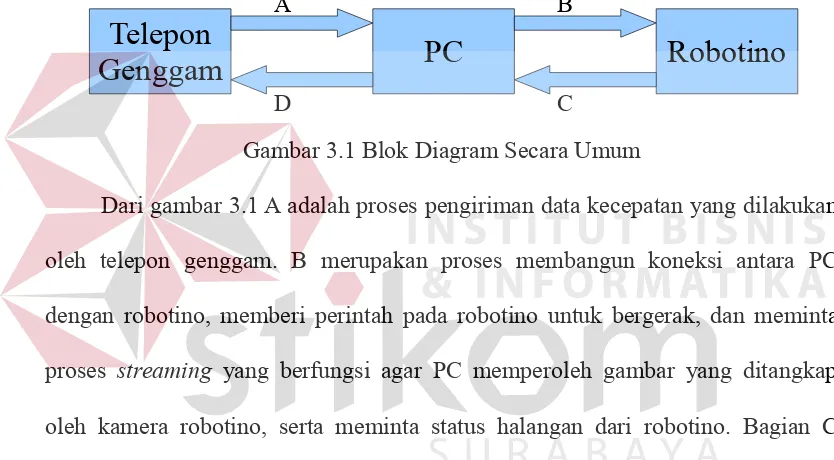
Gambar 3.1 Blok Diagram Secara Umum
Dari gambar 3.1 A adalah proses pengiriman data kecepatan yang dilakukan
oleh telepon genggam. B merupakan proses membangun koneksi antara PC
dengan robotino, memberi perintah pada robotino untuk bergerak, dan meminta
proses streaming yang berfungsi agar PC memperoleh gambar yang ditangkap
oleh kamera robotino, serta meminta status halangan dari robotino. Bagian C
merupakan proses pengiriman semua data yang diminta oleh PC dari robotino.
Bagian terakhir, yaitu D merupakan proses pengiriman data gambar yang akan
ditampilkan pada layar telepon genggam dan pengiriman status halangan yang
akan ditampilkan di telepon genggam dalam bentuk pesan.
29
Telepon
Genggam
PC
Robotino
A B
PC. Proses ini terjadi setelah telepon genggam mendeteksi perubahan axis dan
mengolahnya menjadi kecepatan robot. Berikut adalah flow chart dari proses
pengiriman data kecepatan.
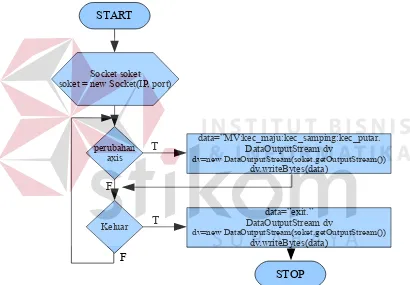
Gambar 3.2 Flmw Chart Proses Pengiriman Data Kecepatan
Dari flmw chart pada gambar 3.2 proses inisialisasi sebelum melakukan
pengiriman gambar ke PC yaitu membangun koneksi dengan PC sebagai server.
Setelah koneksi terbangun, maka telepon genggam perlu mendeteksi adanya
perubahan axis. Setelah terjadi perubahan axis, data axis tersebut diolah menjadi
data kecepatan dan arah robot. Setelah memperoleh data arah dan kecepatan robot,
telepon genggam mengirimkannya ke PC melalui smcket.
data=”MV:kec_maju:kec_samping:kec_putar. soket = new Socket(IP, port)
A.1 ProsesBPendeteksianBPerubahanBAxis
Proses pendeteksian perubahan axis ini dilakukan pada telepon genggam.
Berikut adalah flmw chart pendeteksian perubahan axis.
Gambar 3.3 Flmw Chart Pendeteksian Axis
Untuk melakukan pendeteksian perubahan axis dengan sensor
accelermmeter, diperlukan tiga komponen yaitu SensorManager, Sensor, dan
SensorEventListener. Untuk menggunakan suatu sensor, objek SensorManager
harus dihubungkan terlebih dahulu dengan sistem android yang mengatur bagian
sensor. Selain itu, sensor juga harus ditentukan ingin menggunakan sensor
accelermmeter. Untuk bisa mendeteksi sensor, suatu class harus didaftarkan
terlebih dahulu. Setelah didaftarkan, setiap ada perubahan axis, android akan
memanggil fungsi onSensorChanged. Di dalam fungsi itulah, proses pengambilan
perubahan accuracy pada sensor accelermmeter.
A.2 ProsesBPengolahanBKecepatanBRobotBdariBPerubahanBAxis
Proses perubahan axis tidak bisa secara langsung digunakan sebagai
kecepatan dari robot. Oleh karena itu, dilakukan pengolahan kecepatan robot dari
perubahan axis yang terjadi. Berikut adalah proses pengolahan perubahan axis.
START
A
B
double[] position = new double[3] double[] value = new double[3]
double[] limit = new double[3] int[] save = new int[2] boolean change = false
(position[0]>(value[0]+limit[0]) || position[0]<(value[0]-limit[0]))
T
Gambar 3.4 Flmw Chart Pengolahan Nilai Kecepatan dari Perubahan Axis
Program pengolahan di atas dibagi menjadi dua bagian, yaitu bagian
perhitungan maju dan mundur yang identik dengan array ke-0 dengan
perhitungan kiri dan kanan yang identik dengan array ke-1. Variabel position
merupakan nilai asli dari sumbu x untuk array ke-0 dan sumbu y untuk array
ke-1. Variabel value merupakan nilai tengah antara batas atas dan batas bawah
sebelum kecepatan robot omni berubah menjadi lebih besar ataupun lebih kecil.
Limit merupakan variabel penjumlah dan pengurang untuk variabel value yang
menyatakan batas atas dan bawah perubahan axis saat ini. Saat posisi sumbu x
atau sumbu y sejajar dengan sumbu x dan sumbu y daratan, maka nilai dari
variabel limit untuk sumbu x atau sumbu y adalah 2. Bila sumbu x atau sumbu y
tidak sejajar dengan sumbu x dan y bumi, maka variabel limit untuk sumbu x atau
sumbu y bernilai 1,5. Variabel save berfungsi sebagai nilai kecepatan yang
nantinya dikirimkan ke robot omni. Variabel ini bernilai integer baik positif
maupun negatif. Positif untuk arah maju dan ke kiri, sedangkan negatif untuk arah
mundur dan ke kanan.
limit[1]=1.5
T
B. ProsesBPenerimaanBDataBKecepatanBolehBPC
Berikut adalah flmw chart penerimaan data pada robot omni dari telepon genggam.
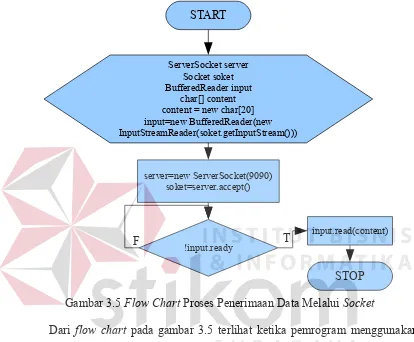
Gambar 3.5 Flmw Chart Proses Penerimaan Data Melalui Smcket
Dari flmw chart pada gambar 3.5 terlihat ketika pemrogram menggunakan
objek BufferedReader, maka pemrogram dapat mengetahui apakah sudah terdapat
data atau belum pada objek smcket. Ketika terdapat data, maka data tersebut
dibaca dan dimasukkan ke dalam array mf char.
Berikut adalah flmw chart pengolahan data yang sudah diterima PC dari
telepon genggam.
ServerSocket server Socket soket BufferedReader input
char[] content content = new char[20] input=new BufferedReader(new InputStreamReader(soket.getInputStream()))
STOP START
!input.ready T
F input.read(content)
Gambar 3.6 Flmw Chart Pengolahan Data Pada Robot Omni
Dari flmw chart di atas, tampak jelas bahwa telepon genggam hanya
mengirimkan dua kriteria, yaitu mv dan exit. Mv ini berfungsi untuk memberikan
perintah pada robot omni untuk menggerakkan robot dengan arah dan kecepatan
bentuk bilangan asli baik positif maupun negatif, sehingga perlu dikalikan dengan
speed supaya menjadi kecepatan yang sebenarnya, yaitu dalam bentuk mm/detik.
Untuk berhenti berkomunikasi, telepon genggam hanya mengirimkan “exit.”. Jadi
array kalimat[] yang terisi hanya kalimat[0] dengan isi “exit”. Untuk mengakhiri
pembacaan array char yang berisi data dari smcket, setiap pengiriman selalu
diakhiri dengan tanda titik('.').
3.1.2 AktivitasBPCBTerhadapBRobotino A. MembangunBKoneksiBdenganBRobotino
Proses membangunan koneksi ini diperlukan agar aplikasi dapat mengontrol
robotino. Berikut adalah flmw chart untuk membangun koneksi.
Gambar 3.7 Flmw Chart Membangun Koneksi dengan Robotino
Cmm merupakan objek yang disediakan oleh API robotino agar aplikasi
dapat berhubungan dengan robotino. Sebelum memulai koneksi, IP dari robotino
harus dimasukkan terlebih dahulu agar mengetahui koneksi tersebut akan
dibangun kemana. Setelah IP dimasukkan, maka dibangunlah koneksi dengan
perintah com.connect().
START
Com com
com=new Com() com.setAddress(“172.26.1.1”)
com.connect()
Gambar 3.8 Flmw Chart Menggerakkan Robotino
Proses membangun koneksi sama seperti metode sebelumnya. Setelah
koneksi terbangun, aplikasi dapat mengontrol pergerakan dari robotino dengan
objek OmniDrive. Untuk memerintah robotino bergerak dengan fungsi setVelmcity
dari objek OmniDrive. Terdapat tiga buah parameter dari fungsi setVelmcity, yaitu
vx, vy, dan omega. Vx berfungsi untuk menentukan arah dan kecepatan maju dan
mundur robotino. Vy berfungsi untuk menentukan arah dan kecepatan robotino
bergerak ke kiri dan ke kanan. Omega merupakan kecepatan putar dari robotino.
Jika vx diberi nilai -100 maka robotino akan bergerak mundur dengan kecepatan
100mm/s, jika vx diberi nilai 300 maka robotino akan bergerak maju dengan
kecepatan 300 mm/s. Ketika Vy diberi nilai 100 maka robotino akan bergerak ke
kiri dengan kecepatan 100 mm/s, sedangkan jika vy diberi nilai -500 maka
robotino akan bergerak ke kanan dengan kecepatan 500 mm/s. Omega merupakan START
Membangun Koneksi OmniDrive move
move=new OmniDrive() move.setVelocity(-100, 100, 20)
kecepatan putar robotino dengan satuan derajat/detik. Jika omega diberi nilai 20
maka robot akan berputar berlawanan jarum jam dengan kecepatan 20o/s, begitu
pula sebaliknya.
C. MemintaBProsesBStreaming danBMengambilBDataBGambar
Meminta proses streaming ini diperlukan agar PC memperoleh gambar yang
ditangkap oleh kamera robotino. Berikut adalah flmw chart untuk meminta proses
streaming.
Gambar 3.9 Flmw Chart Meminta Data Gambar
Untuk mengakses kamera, dilakukan pembangunan koneksi terlebih dahulu.
Untuk melakukan permintaan gambar dari kamera robotino, menggunakan objek
Camera dari API robotino. Untuk dapat mengambil gambar dari kamera robotino,
perlu menyalakan fitur terlebih dahulu, yaitu dengan menggunakan fungsi
setStreaming() dan di set bernilai true.
START
Membangun Koneksi Camera cam
sekitar dan pada robotino. Berikut adalah flmw chart dari meminta status halangan
oleh PC.
Gambar 3.10 Flmw Chart Permintaan Status Halangan
Terdapat dua buah objek yang digunakan dari gambar 3.10 yaitu
DistanceSensmr untuk menggunakan sensor infrared dan Bumper untuk
menggunakan sensor anti-cmalitimn. Untuk mengetahui apakah terjadi benturan
dengan robotino yaitu dengan perintah bumper.value() yang akan memberikan
nilai balik berupa true ketika ada benturan atau false ketika tidak terjadi benturan.
Untuk mendeteksi apakah terdapat halangan di sekitar robotino, menggunakan
perintah distance[i].vmltage() yang akan memberikan nilai balik berupa tegangan
antara 0.29 hingga 2.5. Maka dari itu perlu diberi batasan sendiri pada tegangan
3.1.3 AktivitasBRobotinoBterhadapBPC
A. MengirimBData-DataByangBDimintaBPC
Pengiriman data gambar oleh robotino ke PC ini tidak dapat dituliskan ke
dalam bentuk flmw chart karena menggunakan API yang sudah disediakan. Oleh
karena menggunakan API yang sudah disediakan, tidak diketahui bagaimana alur
kerja dari suatu aktivitas program. Pengiriman ini berlangsung hanya ketika PC
meminta proses streaming terhadap robotino yang sudah dilakukan pada bagian
sebelumnya.
B. ProsesBPenerimaanBDataBGambarBOlehBPC
Berikut adalah flmw chart penerimaan data gambar dari robotino oleh PC.
Gambar 3.11 Flmw Chart Penerimaan Data Gambar Oleh PC dari Robotino
Proses pengambilan data gambar tersebut sebenarnya memiliki fungsi
tersendiri. Fungsi tersebut adalah imageReceivedEvent(). Berikut adalah
private class Mycam extends Camera {
@Override
public void imageReceivedEvent(Image img, long width, long height, long numChannels, long bitsPerChannel, long step)
{
image = img; }
}
Agar bisa menerima data dari fungsi imageReceivedEvent() tersebut, fungsi
tersebut harus dibuat terlebih dahulu dari objek utama yaitu Camera. Setiap ada
frame atau gambar baru yang ditangkap oleh kamera robotino, maka fungsi
tersebut akan dijalankan dan pemrogram bisa mengambil data dari beberapa
parameter yang ada dari fungsi imageReceivedEvent(). Dari program di atas,
setiap ada gambar baru maka data gambar yang sudah berupa objek Image, akan
di simpan ke variabel image.
3.1.4 AktivitasBPCBTerhadapBTeleponBGenggam A. MengirimBDataBGambar
Gambar 3.12 Flmw Chart Pengiriman Data Gambar
Init koneksi sama dengan pembangunan koneksi pada penerimaan data
kecepatan pada telepon genggam. Pengiriman data dilakukan dua kali, yaitu
pengiriman panjang byte yang akan dikirim dan pengiriman data gambar.
Sebelum data gambar dikirimkan, gambar yang berupa objek Image dirubah
terlebih dahulu ke dalam objek ByteArrayOutputStream agar dapat dikirim berupa
array mf byte.
B. PenerimaanBDataBGambarBpadaBTeleponBGenggam
Berikut adalah flmw chart penerimaan data gambar yang dilakukan oleh
telepon genggam.
START
ServerSocket server Socket soket DataOutputStream a
a=new DataOutputStream(soket.getOutputStream) ByteArrayOutputStream simpan
simpan=new ByteArrayOutputStream() ImageIO.write((BufferedImage)image, “PNG”, simpan)
a.writeInt((simpan.toByteArray()).length) a.write(simpan.toByteArray())
Gambar 3.13 Flmw Chart Penerimaan Gambar pada Telepon Genggam
Init koneksi pada gambar 3.13 sama dengan pembangunan koneksi pada saat
telepon genggam melakukan pengiriman data kecepatan ke PC. Penerimaan data
ini dilakukan dua kali, yaitu penerimaan panjang byte yang akan diterima dan
penerimaan data gambar. Setelah gambar diterima berupa array mf byte, maka data
tersebut dirubah ke objek bitmap sehingga nantinya dapat ditampilkan pada layar
telepon genggam.
C. MengirimBStatusBHalangan
Pengiriman ini dilakukan ketika di sekitar robotino terdapat halangan yang
terdeteksi melalui sensor infrared dan ketika terjadi benturan pada robotino yang
terdeteksi pada anti-cmalitimn sensmr. Berikut adalah flmw chart dari pengiriman
status halangan ke telepon genggam.
DataInputStream input=new DataInputStream(soket.getInputStream()) int length
length=input.readInt() Byte[] gambar=new Byte[length]
input.readFully(gambar)
Bitmap bm=BitmapFactory.decodeByteArray(gambar, 0, gambar.length)
Gambar 3.14 Flmw Chart Pengiriman Status Halangan
Pengiriman di sini sama dengan pengiriman data kecepatan oleh telepon
genggam. Data disini berisi “DS.” ketika terjadi pendeteksian ada halangan di
sekitar robotino dan “BP.” ketika terjadi benturan pada robotino. Untuk init
koneksi sama dengan pembangunan koneksi pada saat penerimaan data kecepatan
oleh PC berlangsung.
D. PenerimaanBStatusBHalanganBpadaBTeleponBGenggam
Berikut adalah flmw chart untuk menerima status halangan. START
Init Koneksi
DataOutputStream dv
dv=new DataOutputStream(soket.getOutputStream) dv.writeBytes(data)
Gambar 3.15 Flmw Chart Penerimaan Status Halangan
Penerimaan data status halangan ini sama dengan penerimaan data
kecepatan pada PC. Untuk pengolahan datanya juga sama seperti pada pengolahan
data keccepatan pada PC, bedanya yaitu yang diterima terdapat dua macam
kriteria yaitu “BP.” untuk penanda adanya benturan pada robotino dan “DS.”
untuk pendeteksian adanya halangan di sekitar robotino. Ketika terdeteksi adanya
benturan, maka telepon genggam akan bergetar selama 500ms dan menampilkan
pesan bahwa telah terjadi benturan pada robotino. Ketika terdeteksi adanya
halangan di sekitar robotino, maka telepon genggam akan menampilkan pesan
adanya halangan di sekitar robotino.
char[] content
Content = new char[10] Receive=new BufferedReader(new InputStreamReader(soket.getInputStream()))
!receive.ready()
T
receive.read(content)
START
3.2 PerancanganBPengujian
Perancangan pengujian ini berfungsi untuk merancang pengujian yang akan
dilakukan untuk mencapai hasil yang diinginkan. Pengujian yang akan dilakukan
yaitu pengujian dari setiap bagian yang ada pada sub bab model penelitian.
3.2.1 PengujianBPengirimanBdanBPenerimaanBDataBKecepatanBdariBTeleponB GenggamBkeBPC
Pengujian dilakukan dengan menggerakkan posisi telepon genggam dan
melihat yang terjadi pada jendela cmnsmle pada aplikasi di PC.
Tabel 3.1 Pengujian Pengiriman dan Penerimaan Data Kecepatan
TestB
Pengujian dilakukan dengan membangun koneksi dengan robotino melalui
API yang sudah disediakan oleh robotino.
Tabel 3.2 Pengujian Membangun Koneksi Antara PC dan Robotino
TestB
Tabel 3.3 Pengujian Proses Streaming
Aplikasi berhenti menampilkan
memberikan benturan atau tekanan pada sensor anti-cmalitimn.
Tabel 3.4 Pengujian Status Halangan Robotino
TestB
3.2.5 PengujianBPengirimanBDataBGambarBdariBPCBdanBMenampilkanBpadaB Telepon Genggam
Pengujian dilakukan dengan Mengirimkan data yang diterima PC dari
robotino dan mengirimkannya ke telpon genggam dan ditampilkan pada layar
telepon genggam.
Tabel 3.5 Pengujian Pengiriman Data Gambar dan Menampilkan pada Telepon Genggam ditampilkan pada
layar telepon
GenggamBkeBPC
Pengujian ini dilakukan untuk mengetahui apakah telepon genggam bisa
mengirim data kecepatan yang didapat dari perubahan axis dan apakah PC bisa
menerima data kecepatan dengan baik.
4.1.1 ProsedurBPengujian
1. Menyalakan Robotino
2. Koneksikan PC ke access point robotino
3. Menyalakan program eclipse pada PC
4. Buka file project coba robot
5. Klik package pada hirarki package explorer
6. Jalankan program (ctrl+F11)
7. Koneksikan WiFi telepon genggam ke access point robotino
8. Jalankan aplikasi Robotino yang sudah terinstal pada telepon genggam
9. Masukkan IP dari robotino
10. Masukkan port dengan 9090
11. Posisikan telepon genggam sejajr dengan daratan sebagai proses pointing
12. Tunggu hingga tiga hitungan mundur yang dilakukan oleh aplikasi
13. Menggerakkan robotino dengan menggerakkan telepon genggam
4.1.2 HasilBPengujian
Tabel 4.1 Hasil Pengiriman dan Penerimaan Data Kecepatan
TestB
Pengujian pengiriman dan penerimaan data kecepatan dari telepon genggam
ke PC berjalan dengan baik. Hal ini terbukti dari geraknya robotino sesuai dengan
kemiringan telepon genggam.
4.2 PengujianBMembangunBKoneksiBAntaraBPCBdenganBRobotino
Pengujian ini dilakukan untuk mengetahui apakah PC bisa terhubung
dengan robotino dengan menggunakan API yang sudah disediakan oleh robotino.
4.2.1 ProsedurBPengujian
1. Menyalakan Robotino
2. Koneksikan PC ke access point robotino
3. Menyalakan program eclipse pada PC
4. Buka file project coba robot
5. Klik package pada hirarki package explorer
6. Jalankan program (ctrl+F11)
koneksi antara PC dan robotino
b. Robotino koneksi dari PC
tulisan connected pada lcd robotino dan pada console
SUKSES
Pengujian koneksi antara PC dengan robotino berjalan dengan baik. Hal ini
terbukti dari tampilnya tulisan “Connected” pada sisi aplikasi dan robotino yang
tampak pada layar.
Gambar 4.1 Hasil Koneksi Pada Sisi Aplikasi
Gambar 4.2 Hasil Koneksi Pada Sisi Robotino
4.3 PengujianBProsesBStreaming danBMenampilkannyaBdiBPC
Pengujian ini dilakukan untuk mengetahui apakah PC bisa melakukan
4.3.1 ProsedurBPengujian
1. Menyalakan Robotino
2. Koneksikan PC ke access point robotino
3. Menyalakan program eclipse pada PC
4. Buka file project coba streaming
5. Klik package pada hirarki package explorer
6. Jalankan program (ctrl+F11)
7. Masukkan y pada console untuk melakukan streaming
8. Perhatikan yang terjadi pada aplikasi
9. Masukkan n pada console untuk menghentikan streaming
10. Perhatikan yang terjadi pada aplikasi
4.3.2 HasilBPengujian
Tabel 4.3 Hasil Proses Streaming
Gambar 4.3 Saat Awal Aplikasi Dijalankan
Gambar 4.4 Saat Proses Streaming
4.4 PengujianBPendeteksianBHalanganBpadaBRobotino
Pengujian ini dilakukan untuk mengetahui apakah sensor infrared dan
anti-coalition pada robotino bisa dimanfaatkan sebagai pemberi tanda kepada user
bahwa terdapat halangan pada robotino.
4.4.1 ProsedurBPengujian
1. Menyalakan Robotino
2. Koneksikan PC ke access point robotino
3. Menyalakan program eclipse pada PC
4. Buka file project coba robot
5. Klik package pada hirarki package explorer
6. Jalankan program (ctrl+F11)
7. Koneksikan WiFi telepon genggam ke access point robotino
8. Jalankan aplikasi Robotino yang sudah terinstal pada telepon genggam
9. Masukkan IP dari robotino
10. Masukkan port dengan 9090
11. Posisikan telepon genggam sejajr dengan daratan sebagai proses pointing
12. Tunggu hingga tiga hitungan mundur yang dilakukan oleh aplikasi
13. Memberikan benda atau halangan di sekitar robotino
14. Perhatikan pesan yang muncul pada layar telepon genggam
15. Memberikan tekanan pada sensor anti-coalition
adanya
Telepon genggam dapat menampilkan setiap pesan pada layar telepon genggam
ketika terdapat halangan. Telepon genggam juga bergetar ketika terjadi benturan
pada robotino yang terdeteksi dari sensor anti-coalition.
4.5 PengujianBPengirimanBDataBGambarBdariBPCBdanBMenampilkanBpadaB
Telepon Genggam
Pengujian ini dilakukan untuk mengetahui apakah telepon genggam dapat
menerima data gambar yang dikirim dari PC dan menampilkannya pada layar
4.5.1 ProsedurBPengujian
1. Menyalakan Robotino
2. Koneksikan PC ke access point robotino
3. Menyalakan program eclipse pada PC
4. Buka file project coba robot
5. Klik package pada hirarki package explorer
6. Jalankan program (ctrl+F11)
7. Koneksikan WiFi telepon genggam ke access point robotino
8. Jalankan aplikasi Robotino yang sudah terinstal pada telepon genggam
9. Masukkan IP dari robotino
10. Masukkan port dengan 9090
11. Posisikan telepon genggam sejajr dengan daratan sebagai proses pointing
12. Tunggu hingga tiga hitungan mundur yang dilakukan oleh aplikasi
13. Perhatikan layar telepon genggam
4.5.2 HasilBPengujian
yang cukup lama untuk menampilkan gambar pada layar. Hal ini menyebabkan
adanya delay yang mengganggu bagi user untuk melihat sesuatu di depan
PENUVUP
5.1 Simpulan
1. Pemanfaatan sensor accelerometer pada telepon genggam berbasis android
sebagai kendali mobile robot sudah berhasil diimplementasikan dengan
adanya kendala. Kendala tersebut adalah pembacaan sensor yang kurang
akurat dari telepon genggam. Hal tersebut diatasi dengan memberikan
batasan nilai sebelum kecepatan robot omni berubah.
2. Aplikasi di telepon genggam berbasis android untuk menggerakkan robot
omni sudah berhasil dibuat.
3. Aplikasi di robot omni untuk mengirimkan gambar yang diterima oleh
kamera robot omni berhasil dibuat dengan adanya kendala di sisi penerimaan,
yaitu lamanya telepon genggam untuk memproses penampilan gambar di
layar yang mengakibatkan adanya delay.
4. Protokol komunikasi antara telepon genggam dengan mobile robot sudah
dibuat dan diimplementasikan.
5.2 Saran
Sebagai pengembangan dari penelitian yang telah dilakukan, berikut adalah
saran dari penulis:
1. Metode ini dapat dikembangkan untuk menggerakkan mobil. Jadi nantinya
dapat mengendalikan mobil dari jarak jauh seperti pada film James Bond.
2. Metode ini dapat diimplementasikan dalam bidang militer, yaitu
mnggerakkan suatu mobile robot untuk masuk dan melihat apa saja yang
berada di dalam suatu ruangan sebelum proses eksekusi selanjutnya. Bisa
diimplementasikan baik melalui WiFi maupun jaringan telekomunikasi.
3. Metode ini juga dapat digunakan untuk mengendalikan senjata tempur dari
jarak jauh layaknya memainkan suatu permainan melalui jaringan yang
Ableson, W. Frank and Sen, Robi and King, Chris. 2011. Abdroid In Action Second Edition. Stamford: Mannings Publications Co.
Android. 2011. Sensor Event. (online).
(http://developer.android.com/reference/android/hardware/SensorEvent.html , diakses tanggal 26 Agustus 2011).
Android. 2011. Application Fundamentals. (online).
(http://developer.android.com/guide/topics/fundamentals.html, diakses
tanggal 6 Januari 2012).
Andoid. 2011. The Andoroid Manifest. (online).
(http://developer.android.com/guide/topics/manifest/manifest-intro.html, diakses tanggal 6 Januari 2012).
Braunl, Thomas. 2006. Embedded Robotics. Germany: Springer.
Didik. 2010. Jumlah Pemakai Handphone di Indonesia. (online).
(http://www.harianberita.com/jumlah-pemakai-handphone-di-indonesia.html, diakses tanggal 26 Agustus 2011).
Graham, Brian Barkley. 2000. Using an Accelerometer Sensor To Measure Human Hand Motion. Department of Electrical Engineering and Computer Science . Massachusetts Institute of Technology . Massachusetts.
Hariyanto, Bambang. 2010. Esensi-esensi Bahasa Pemrograman Java. Bandung: Informatika Bandung.
Karras, Ulrich. 2011. Robotino – An Open Learning Mobile Robot System for Robocup. (online). (http://www.festo-didactic.com/ov3/media/customers/ 1100/festo_robocup.pdf, diakses tanggal 25 Januari 2012).
Lee, Wei-Meng. 2011. Beginning Android Application Development. Indianapolis: Wiley Publishing, Inc.
Mulyadi. 2010. Membuat Aplikasi Untuk Android. Yogyakarta: Multimedia Center Publishing.
Nugroho, Wisnu. 2010. Review Samsung Galaxy Tab – Desain. (online).
(http://www.infokomputer.com/lainnya/review-samsung-galaxy-tab/halaman-2, diakses tanggal 26 Agustus 2011).
menggunakan-protokol-tcpip-01-1992.rtf, diakses tanggal 16 Agustus 2011). Canada.
Purnama, Rangsang. 2005. Tuntunan Pemrograman Java, Jilid 3. Jakarta: Prestasi Pustaka
Rajagukguk, Agatha Rebecca. 2009. Inovasidan Kreatifitas Layanan Penelusuran, Penggunaan Internet dan Jurnal Online pada Perpustakaan Universitas Sumatera Utara. (Online). (http://repository.usu.ac.id/bitstream/ 123456789/13596/1/09E02383.pdf, diakses tanggal 25 Januari 2012).
Weber, Ralph Cristoph and Bellenberg, Markus and Schwarzenberger, Doris.
2010. Festo Robotino Manual. (online).