LINTAS PADA PERSIMPANGAN DUA ARAH
BERBASIS LOGIKA FUZZY
Diajukan sebagai salah satu syarat menempuh ujian Sarjana Strata 1 (S1)
pada Jurusan Teknik Elektro
Disusun Oleh : SABAS SITANGGANG
13110043
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS TEKNIK DAN ILMU KOMPUTER
iv LEMBAR PENGESAHAN
ABSTRAK ABSTRACT
KATA PENGANTAR ... i
DAFTAR ISI ... iv
DAFTAR TABEL ... viii
DAFTAR GAMBAR ... x
BAB IPENDAHULUAN ... 1
1.1 Latar Belakang... 1
1.2 Identifikasi Masalah ... 2
1.3 Rumusan Masalah ... 2
1.4 Tujuan ... 3
1.5 Batasan Masalah ... 3
1.6 Metode Penelitian ... 4
1.7 Sistematika Penulisan ... 4
BAB IILANDASAN TEORI ... 6
2.1 Pengolahan Citra Digital ... 6
2.1.1 Cira Kontinyu ... 6
2.1.2 Citra Digital ... 7
v
2.3.2 Grayscale ... 10
2.3.3 Biner (Hitam Putih) ... 11
2.4 Thresholding ... 12
2.5 Cropping ... 13
2.6 Histogram ... 13
2.7 Edge Detection ... 14
2.8 Elemen-elemen Citra Digital ... 17
2.8.1 Kecerahan (brightness) ... 17
2.8.2 Kontras (contrast) ... 17
2.8.3 Kontur (countur) ... 18
2.8.4 Warna (color) ... 18
2.8.5 Bentuk (shape) ... 19
2.8.6 Tekstur (texture) ... 19
2.9 Video Digital ... 20
2.9.1 Resolusi... 20
2.9.2 Bit Depth ... 21
2.9.3 Frame Rate... 21
2.10 Cross Correlation (Korelasi Silang) ... 22
2.11 Logika Fuzzy ... 22
2.11.1 Himpunan Fuzzy ... 23
vi
2.11.5 Fuzzy Inference System ... 28
2.12 Komunikasi Serial ... 29
2.12 Mikrokontroler ... 32
2.12 LED ... 35
BAB IIIPERANCANGAN DAN PEMBUATAN SIMULASI ... 36
3.1 Perancangan Sistem ... 36
3.2 PerancanganSoftware ... 39
3.2.1 Konversi CitraAsli ke Grayscale ... 40
3.2.2 Konversi ke Biner ... 41
3.2.3 Deteksi Tepi dengan Algoritma Canny ... 42
3.2.4 Proses Segmentasi ... 42
3.2.5 Pendeteksian Jumlah Kendaraan ... 43
3.3 Logika Fuzzy ... 44
3.3.1 Pembentukan Himpunan Fuzzy ... 44
3.3.2 Fungsi Keanggotaan ... 45
3.3.3 Basis Kaidah Fuzzy (Fuzzy Rule Base) ... 46
3.3.4 KondisiPenyalaanLampuLaluLintas ... 49
3.4 RangkaianSistem Minimum Mikrokontroller AVR ATmega8535 ... 50
3.5 RangkaianLampuLaluLintas ... 51
vii
4.1 PengujianSistemSecaraParsial ... 55
4.1.1 PemasanganKameradanPengambilanGambar (Capture) ... 55
4.1.2 Image ProcessingUntukMendeteksiJumlahKendaraan .... 56
4.1.3 PengujianLogikaFuzzy... 74
4.1.4 PenentuanKondisi-KondisiPenyalaanLampuLaluLintas ... 83
4.1.5 HubunganKomunikasi Serial DenganSistem Minimum ATmega 8535 danLampuLaluLintas .... 86
4.2 PengujianSistemSecaraKeseluruhan ... 88
BAB V KESIMPULAN... 91
5.1 Kesimpulan... 91
5.2 Saran ... 92
94
DAFTAR PUSTAKA
[1] Christian, Samuel, dan Setiawan, Budi, dan Widyarto. Perancangan Pengaturan Sistem Lampu lalu lintas dengan CCTV Dinamis.
[2] Acharya, Tinku, Image Processing : Principles and Application, New Jersey : John Wiley & Sons, 2005.
[3] Pratt, Wiliam K, Digital Image Processing, New Jersey : John Wiley & Sons, 2007.
[4] Sihar, Rubinhut. (2008). plikasi Pengolahan Citra Digital untuk Menghitung Jumlah Suatu Objek pada Suatu Daerah Pengamatan.
[5] Gonzales, Rafael C, Digital Image Processing, New Jersey : Prentice Hall International, 2002.
[6] Basuki, Achmad, Pengolahan Citra Digital Menggunakan Visual Basic, Yogyakarta : Graha Ilmu, 2005.
[7] Munir, Rinaldi. Pengantar Logia Fuzzy. Teknik Informatika-STEI ITB.
[8] Danuri, Muhammad. Traffic Manajemen Center Dengan Logika Fuzzy dan Sensor Kamera.
[9] Triana, Anggi. (2009). Simulasi Pengaturan Lampu lalu lintas Pada Multi Persimpangan yang Berdekatan Menggunakan Logika Fuzzy, Bandung : UNIKOM.
[10] Yusriadi. (2009). Simulasi Pengaturan Lampu lalu lintas Otomatis Menggunakan Kamera Berdasarkan Distribusi Kepadatan.
[11] Logika Fuzzy. Fungsi Keanggotaan. [12] Bourke, Paul. (1996), Cross Correlation.
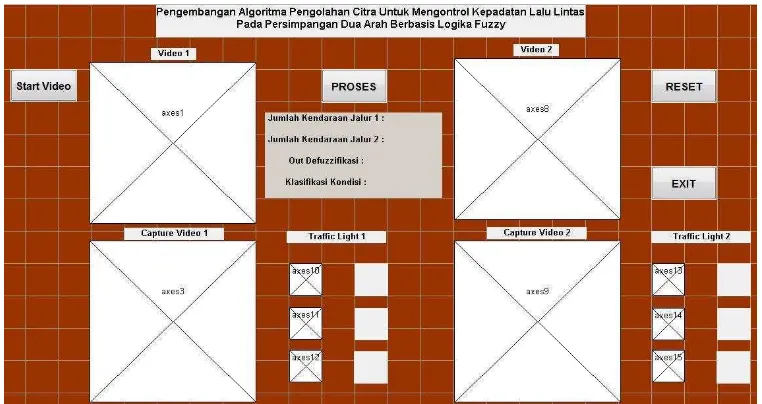
Puji dan syukur kepada Tuhan Yang Maha Esa yang telah memberikan rahmat-Nya sehingga laporan Tugas Akhir dengan judul “Pengembangan Algoritma Pengolahan Citra Untuk Mengontrol Kepadatan Lalu Lintas Pada
Persimpangan Dua Arah Berbasis Logika Fuzzy” dapat terselesaikan dengan baik.
Adapun maksud penyusunan laporan Tugas Akhir ini adalah bertujuan untuk menyelesaikan program studi S1 dan merupakan salah satu syarat dalam menempuh ujian sarjana Jurusan Teknik Elektro Universitas Komputer Indonesia (UNIKOM) Bandung.
Penulis menyadari bahwa Tugas Akhir ini masih jauh dari kesempurnaan, dikarenakan keterbatasan penulis, baik dalam penyajian materi, sistematika penulisan, sumber bacaan, pengetahuan dan pengalaman penulis. Walaupun demikian, penulis telah berusaha dan mencoba memberikan karya tulis yang bermanfaat bagi penulis khususnya dan bagi pembaca umumnya.
Pada kesempatan ini, tidak lupa penulis mengucapkan terima kasih yang sebesar-besarnya kepada semua pihak yang telah membantu dalam proses pengerjaan laporan Tugas Akhir ini, terutama kepada :
1. kedua orang tuaku yang telah memberikan dukungan materi maupun doa hingga terselesaikannya laporan Tugas Akhir ini,
2. bapak Ir. Eddy Suryanto Soegoto,M.Sc. sebagai Rektor Universitas Komputer Indonesia Bandung,
5. bapak Muhammad Aria, M.T. sebagai dosen wali Universitas Komputer Indonesia angkatan 2010,
6. ibu Tri Rahajoeningroem M.T. sebagai Koordinator Tugas Akhir Program Studi Teknik Elektro Universitas Komputer Indonesia,
7. bapak Jana Utama, M.T. sebagai pembimbing Tugas Akhir saya di Universitas Komputer Indonesia
8. dosen-dosen teknik elektro yang dengan sabar mendidik, mengajar, memberikan motivasi, dan memberikan saran-saran serta masukan-masukan selama masa perkuliahan sampai menyelesaikan skripsi ini, 9. ibu Mery, selaku sekretaris jurusan Program Studi Teknik Elektro
Universitas Komputer Indonesia
10.kedua abangku, kakakku, dan adikku satu-satunya, yang telah memberikan dukungan materi maupun doa hingga terselesaikannya laporan Tugas Akhir ini,
11.teman-teman seperjuangan yang bersama-sama mengambil Tugas Akhir, yang selalu memberikan dukungan dan ikut serta membantu untuk menyelesaikan skripsi ini,
mereka berikan kepada penulis mendapat pahala dari-Nya. Amin.
Bandung, Agustus 2014
1 1.1 Latar Belakang
Pertumbuhan jumlah penduduk di Indonesia mengalami peningkatan yang sangat pesat. Seiring dengan pertumbuhan tersebut, jumlah kendaraan bermotor juga semakin bertambah karena mobilitas (pergerakan) penduduk semakin luas. Peningkatan tersebut membutuhkan pelayanan transportasi yang memadai, akan tetapi pada kenyataannya tingginya mobilitas (pergerakan) penduduk berbanding terbalik dengan perkembangan pelayanan transportasi. Hal ini mengakibatkan beberapa kota-kota besar mengalami kemacetan lalu lintas. Terutama pada persimpangan jalan yang sering kali terjadi kemacetan, kekacauan dan bahkan kecelakaan lalu lintas. Hal ini disebabkan karena antrian kendaraan pada suatu persimpangan dapat berpengaruh terhadap pesimpangan lain yang ada disekitarnya.
Melihat pentingnya peranan lalu lintas dalam pengaturan kelancaran berlalu lintas, maka diperlukan suatu rekayasa sistem untuk pengendalian lampu lalu lintas. Oleh karena itu diperlukan metode pengaturan lampu lalu lintas yang secara otomatis menyesuaikan diri berdasarkan jumlah kendaraan berbasis logika
minimum ATmega8535 menggunakan komunikasi serial RS232 untuk menyalakan lampu lalu lintas.
Dengan menggunakan kamera, jumlah kendaraan yang mengantri di persimpangan lampu lalu lintas dan jumlah kendaraan yang menuju ke persimpangan lampu lalu lintas dapat di pantau sehingga dapat ditetapkan jalur mana yang jumlah kendaraannya lebih bnyak dibandingkan jalur yang lainnya. Pada tugas akhir ini, akan dibuat pengembangan algoritma pengolahan citra untuk mengontrol kepadatan lalu lintas pada persimpangan dua arah berbasis logika
Fuzzy.
1.2 Identifikasi Masalah
Adapun identifikasi masalah dalam pembuatan tugas akhir ini adalah sebagai berikut.
1. Peningkatan jumlah kendaraan bermotor berbanding terbalik dengan perkembangan prasarana pengaturan lampu lalu lintas, sehingga sering terjadi kemacetan, kekacauan dan bahkan kecelakaan lalu lintas.
2. Belum adanya sistem pengaturan lampu lalu lintas yang penyalaan
lampunya disesuaikan berdasarkan jumlah kendaraan berbasis logika
Fuzzy dengan kondisi kepadatan ditetapkan berdasarkan jumlah kendaraan.
1.3 Rumusan Masalah
1. Bagaimana membuat algoritma yang dapat mendeteksi atau mengetahui jumlah kendaraan dari gambar yang di tangkap kamera?
2. Bagaimana membuat algoritma penyalaan lampu lalu lintas yang kondisi-kondisi penyalaannya dibagi berdasarkan hasil output defuzzifikasi?
1.4 Tujuan
Adapun tujuan dari pembuatan tugas akhir ini adalah sebagai berikut.
1. Untuk membuat algoritma yang dapat mendeteksi atau mengetahui jumlah kendaraan dari gambar yang di tangkap kamera.
2. Untuk membuat algoritma penyalaan lampu lalu lintas yang kondisi-kondisi penyalaannya dibagi berdasarkan hasil output defuzzifikasi.
1.5 Batasan Masalah
Dalam merancang dan membuat Tugas akhir ini, penulis membatasi beberapa batasan masalah sebagai berikut.
1. Pengujian dilakukan dengan simulasi di MATLAB dan membuat miniatur
traffic light, dengan panjang 75 cm dan lebar 65 cm. 2. Pengujian sistem dilakukan pada dua persimpangan.
3. Pengambilan gambar menggunakan kamera USB C170 (webcam).
4. Diasumsikan kendaraan bergerak lurus (tidak berbelok ke kiri atau ke kanan).
1.6 Metoda Penelitian
Metode penelitian yang digunakan dalam pembuatan miniature dan simulasi serta penyusunan karya tulis ini adalah sebagai berikut.
1. Studi pustaka, yaitu mencari referensi-referensi yang berkaitan dengan judul yang ada, baik melalui buku maupun jurnal-jurnal yang terkait dengan judul yang ada.
2. Pembuatan program simulasi dan komunikasi serial, merupakan pembuatan pengembangan algoritma pengolahan citra untuk mengontrol kepadatan lalu lintas pada persimpangan dua arah berbasis logika Fuzzy
dengan menggunakan program MATLAB dan komunikasi serial untuk penyalaan lampu lalu lintas.
3. Pembuatan pengontrol Fuzzy, yaitu pembuatan pengontrol Fuzzy
menggunakan program MATLAB.
4. Pengujian dan analisa, yaitu menganalisa dan menyimpulkan hasil-hasil percobaan dari hasil pengujian, mengambil suatu kesimpulan dan memberi saran pada tugas akhir ini.
1.7 Sistematika Penulisan
Sistematika penulisan tugas akhir ini terdiri dari 5 (lima) bab, dengan masing-masing bab sebagai berikut :
BAB I Pendahuluan
Bab ini menjelaskan teori-teori penunjang yang digunakan sebagai dasar dalam penelitian tugas akhir ini, yaitu teori pengolahan citra, kontroller logika Fuzzy secara umum, komunikasi serial, dan mikrokontroler.
BAB III Pembuatan Simulasi dan Perancangan Alat
Menjelaskan mengenai tahapan-tahapan desain program simulasi pengontrol lampu lalu lintas dengan menggunakan program simulator MATLAB yang dihubungkan dengan komunikasi serial RS232 sehingga dapat menggambarkan bagaimana kinerja sistem pengontrol lampu lalu lintas menggunakan logika Fuzzy pada persimpangan dua arah.
BAB IVAnalisa dan Pembahasan
Bab ini membahas hasil dari pengujian dan menunjukkan hasil analisa yang telah diperoleh.
BAB V Penutup
6 BAB II
LANDASAN TEORI
2.1 Pengolahan Citra Digital
Pengolahan citra digital (digital image processing) merupakan suatu proses dengan masukan berupa citra dan hasil dari proses tersebut dapat berupa informasi. Pada awalnya pengolahan citra digital ini dilakukan untuk memperbaiki kualitas citra, namun dengan semakin berkembangnya teknologi pengolahan citra digital tidak hanya memperbaiki kualitas citra, melainkan juga dapat mengekstraksi informasi-informasi yang terdapat dari citra tersebut.
Berdasarkan jenisnya suatu citra dapat diklasifikasikan menjadi 2 jenis yaitu citra kontinyu dan citra digital. Adapun penjelasan mengenai kedua jenis citra adalah sebagai berikut.
2.1.1 Citra Kontinyu
Citra kontinyu adalah fungsi intensitas 2 dimensi f(x,y), adapun x dan y adalah koordinat spasial, dan f pada titik (x,y) merupakan tingkat kecerahan (brightness) suatu citra pada suatu titik. Suatu citra diperoleh dari penangkapan kekuatan sinar yang dipantulkan oleh objek. Suatu citra kontinyu dihasilkan dari alat-alat optik yang menerima sinyal analog dari citra tersebut, seperti mata pada manusia, kamera, pemindai (scanner) dan sebagainya, sehingga bayangan objek yang disebut citra tersebut terekam. Secara matematis fungsi intensitas cahaya pada bidang dua dimensi disimbolkan dengan f(x,y), yang dalam hal ini :
f(x,y) : intensitas cahaya (brightness) pada titik (x,y) Nilai f(x,y) sebenarnya adalah hasil kali dari :
a. i(x,y) = jumlah cahaya yang berasal dari sumbernya (ilumination), nilainya antara 0 sampai tak berhingga, dan
b. r(x,y) = derajat kemampuan objek memantulkan cahaya (reflection), nilainya antara 0 dan 1.
Gambar 2.1 Proses Pembentukan Citra [1]
2.1.2 Citra Digital
Citra digital adalah kumpulan data diskrit yang berbentuk matriks dua dimensi yang angka-angkanya dari matriks tersebut menunjukkan tingkat kecerahan dari titik-titik tersebut. Titik-titik yang membangun citra digital inilah yang sering disebut dengan piksel. Untuk mendapatkan suatu citra digital ada beberapa cara untuk mengakusisi citra tersebut, antara lain :
1. menangkap citra dengan menggunakan kamera video. Berdasarkan sensor yang digunakan, kamera video dapat dibagi menjadi 2 jenis, yaitu :
b. kamera video yang menggunakan sensor CCD (Charge Couple Device).
2. Melakukan konversi citra analog menjadi citra digital, pada umumnya proses konversi ini menggunakan alat-alat bantu seperti scanner dan lain-lain.
Citra digital yang berukuran N x M dinyatakan dengan matriks yang berukuran N
baris dan M kolom sebagai berikut [3]: pada citra, sedangkan f(x,y) merupakan intensitas (derajatkeabuan) pada titik (x,y).
Masing-masing elemen padacitra digital (berarti elemen matriks) disebut elemen citra (image element), elemen gambar (picture element) atau piksel (piksel).
2.2 Piksel
Piksel adalah unsur gambar atau representasi sebuah titik terkecil dalam
adalah citra digital dengan tingkat kuantitas 8 bit, hal ini didasarkan atas pertimbangan besar ukuran berkas dari citra dan kemampuan mata manusia dalam membedakan warna.
2.3 Warna pada Citra Digital
Mata sebagai indra manusia yang berfungsi untuk menerima rangsangan berupa cahaya dan selanjutnya diproses oleh otak dan diubah menjadi suatu persepsi. Sebagai alat indra yang sensitif terhadap cahaya, mata manusia juga memiliki suatu keterbatasan dalam menerima rangsangan cahaya, cahaya yang dapat diterima oleh mata manusia terbatas dari panjang gelombang 400 nm (violet) sampai 770 nm (merah). Oleh karena warna adalah bentuk lain panjang gelombang yang diterima oleh manusia, maka suatu warna dapat di representasikan sebagai fungsi berikut [2].
( , , , )………... (2.2) Dengan x dan y adalah posisi dari titik pada citra, t adalah waktu pada citra di tangkap,dan panjang gelombang pada titik citra. Berdasarkan warnanya citra digital dapat di bagi menjadi beberapa jenis mode warna, antara lain sebagai berikut.
2.3.1 RGB
layer R (red), 8 bit layer G (green), dan 8 bit layer B (blue). Dengan mengkomposisikan ketiga layer warna tersebut akan didapat 2563 atau 16,777,216 warna, yang tentunya sudah mewakili semua warna yang dapat dilihat oleh mata manusia.
2.3.2 Grayscale
Mode warna grayscale adalah mode warna yang dihasilkan dari perbandingan nilai-nilai red (R), green (G), dan blue (B) dengan beberapa konstanta tertentu sehingga menghasilkan warna abu-abu. Mode warna ini digunakan untuk mempermudah dalam melakukan proses pengolahan selanjutnya, karena dengan mengubah mode warna RGB menjadi mode warna grayscale maka ketiga layer matriks yang sebelumnya memiliki nilai yang berbeda-beda untuk dikonversikan menjadi satu layer matriks, dengan nilai derajat keabuan tertentu hal ini hanya dilakukan pada proses pengolahan citra digital yang tidak membutuhkan perbedaaan warna sebagai informasi yang akan diolah.
Beberapa teknik untuk melakukan konversi dari mode warna RGB ke mode warna grayscale dapat dituliskan dengan persamaan sebagai berikut [3]:
�= 0,299∗ � + 0,587∗ + (0.144∗ ) ……….. (2.3)
dari ketiga layer matriks. Untuk persamaan (2.3) adalah standar persamaan
grayscale pada televisi, baik sistem PAL (Phase Alternation Line) maupun NTSC (National Television System Committee).
2.3.3 Biner (Hitam Putih)
Citra dengan mode warna biner merupakan citra dengan komposisi warna yang hanya terdiri dari 2 jenis warna saja, yakni hitam dan putih. Mode warna ini banyak dipakai dalam proses-proses pengenalan citra yang tidak membutuhkan informasi warna, seperti proses pengenalan morfologi dari suatu objek, penipisan objek, manipulasi bentuk objek, dan lain-lain. Ada beberapa keuntungan dari citra biner yaitu [4]:
kebutuhan memori menjadi lebih kecil karena nilai derajat keabuan hanya
membutuhkan representasi satu bit.
waktu pemprosesan lebih cepat dibandingkan dengan citra grayscale
karena banyak operasi pada citra biner yang dilakukan sebagai operasi logika.
Terdapat beberapa alasan perlunya dilakukan perubahan dari citra
grayscale menjadi citra biner, yaitu [4]:
untuk mengidentifikasi keberadaan objek, yang direpresentasikan sebagai
daerah di dalam citra. Misalnya pemisahan suatu objek dari latar belakangnya.
untuk lebih memfokuskan pada analisis morfologi, dalam hal ini intensitas
untuk mengkonversikan citra yang telah ditingkatkan kualitas tepinya ke
penggambaran garis-garis tepi.
Tidak seperti pengkonversian mode warna RGB ke grayscale yang hanya melibatkan operasi perkalian dengan konstanta-konstanta tertentu maupun dengan mencari rata-ratadari ketiga layer matriks tersebut, untuk mendapatkan nilai biner dari suatu warna piksel maka sebelumnya harus dilakukan teknik thresholding, maka nilai biner dari suatu piksel akan diperoleh dengan melakukan klasifikasi nilai piksel berdasarkan nilai thresholding tersebut, seperti yang terlihat pada persamaan di bawah ini [5]:
� , = 1, � ( , ) ℎ
0, � ( , ) ℎ………... (2.6)
Dengan th adalah nilai threshold dari citra.
2.4 Thresholding
Thresholding adalah proses untuk mengubah kuantisasi pada citra digital, dengan menggunakan teknik thresholding maka derajat keabuan suatu citra dapat diubah sesuai dengan keinginan, selain itu teknik thresholding juga sering digunakan untuk mengkelompokan beberapa warna menjadi kelas-kelas tertentu. Adapun persamaan yang digunakan untuk mendeteksi pengkelompokan tersebut adalah sebagai berikut [6]:
Dengan x adalah nilai pengelompokan dari threshold dan th nilai dari threshold itu sendiri.
Contoh penggunaan threshold adalah konversi mode warna grayscale ke mode warna biner, seperti yang telah dibahas sebelumnya. Untuk melakukan konversi mode warna grayscale ke mode warna biner maka nilai tingkat kecerahan dari suatu piksel dikelompokkan menjadi dua kelas, hal ini dilakukan karena citra biner sendiri merupakan citra yang hanya mempunyai dua kemungkinan nilai pada setiap pikselyakni nilai satu dan nilai nol.
2.5 Cropping
Proses cropping adalah proses menghilangkan beberapa bagian dari citra. Pada proses ini bagian citra yang tidak terseleksi akan dihilangkan.
Gambar 2.2 Proses cropping pada citra
2.6 Histogram
keabuan 8 bit, nilai derajat keabuan dari 0 – 255). Secara matematis histogram citra dihitung dengan rumus sebagai berikut [6]:
ℎ = ……….. (2.8)
Dimana,
hi = frekuensi kemunculan suatu nilai piksel yang memiliki tingkat kecerahan i.
ni= jumlah piksel yang memiliki tingkat kecerahan i.
n = jumlah seluruh piksel yang ada pada citra.
2.7 Edge Detection
Proses deteksi tepi (edge detection) akan melakukan konversi menjadi dua macam nilai yaitu intensitas warna rendah atau tinggi, contoh bernilai nol atau satu. Dan proses edge detection berguna untuk menyederhanakan analisis citra dengan mengurangi sejumlah data secara drastis untuk diproses, dengan tetap mempertahankan informasi yang penting mengenai garis-garis batas objek. Gradien adalah hasil pengukuran perubahan dalam sebuah fungsi intensitas, dan sebuah citra dapat dipandang sebagai kumpulan beberapa fungsi intensitas kontinyu sebuah citra.
Perubahan mendadak pada nilai intensitas dalam suatu citra dapat dilacak menggunakan perkiraan diskrit pada gradien. Deteksi tepi akan menghasilkan nilai tinggi apabila ditemukan tepi dan nilai rendah jika sebaliknya. Beberapa metode yang digunakan untuk deteksi tepi, antara lain metode Robert, metode
edge detection mendeteksi semua tepi-tepi suatu objek. Hal ini mempermudah untuk mendeteksi hasil pendeteksian berupa objek atau tidak.
Metode Cannyedge detection merupakan pengembangan dari metode dasar
edge detection. Perancangan sebuah prosedur dengan menerapkan langkah-langkah metode Canny edge detection akan menghasilkan sebuah tampilan gambar yang berbeda dengan menampilkan efek relief didalamnya. Efek relief
adalah seperti sebuah tampilan batu kasar yang diukir, yaitu garis-garis kasar yang membentuk sebuah penggambaran objek didalamnya. Efek relief terbentuk dari bayangan terang dan gelap. Kedua bayangan ini terjadi akibat adanya sorotan sinar mengenai gambar dari arah tertentu. Kelebihan dari metode Canny edge detection ini kemampuan untuk mengurangi noise sebelum melakukan perhitungan deteksi tepi sehingga tepi-tepi yang dihasilkan lebih banyak. Algoritma Canny edge detection secara umum beroperasi sebagai berikut [12] :
1. Menghilangkan noise yang ada pada citra dengan mengimplementasikan Filter Gaussian Hasilnya citra akan tampak sedikit buram. Hal ini dimaksudkan untuk mendapatkan tepian citra yang sebenarnya. Bila tidak dilakukan maka garis-garis halus juga akan dideteksi sebagai tepian.
Berikut ini salah satu contoh filter Gaussian dengan � = 1.4 :
(Gx) dan secara vertikal (Gy). Berikut ini salah satu contoh operator deteksi
Hasil dari kedua operator digabungkan untuk mendapatkan hasil gabungan tepi vertikal dan horizontal dengan rumus:
= + | |
………...…...
(2.11)3. Mendeteksi Arah tepian yang ditemukan dengan menggunakan rumus :
� = arctan ………. (2.12)
4. Non-maximal suppression adalah citra yang berisi kandidat edge serta intensitas dari kekuatan edge di posisi piksel tersebut. Langkah terakhir adalah thresholding atau klasifikasi tiap piksel apakah termasuk dalam kategori piksel edge atau tidak. Pada tahap ini bisa saja menggunakan threshold yang berdasarkan pada satu nilai tertentu. Namun pemilihan threshold yang hanya menggunakan satu nilai ini memiliki keterbatasan yaitu adanya kemungkinan piksel yang hilang padahal sebetulnya merupakan piksel edge (false-negative) atau dimasukkannya piksel yang sebetulnya merupakan noise sebagai piksel edge ( false-positive). Oleh sebab itu dalam melakukan klasifikasi tidak hanya diperlukan intensitas dari kekuatan edge sebagai pertimbangan namun juga topologi (keterhubungan antar-piksel) lokal dari piksel tersebut. Sederhananya hysteresis thresholding adalah klasifikasi dengan dua buah nilai High-Threshold dan Low-Threshold. Suatu piksel disahkan sebagai
piksel edge jika nilainya lebih besar atau sama dengan High-Threshold
(thresholding umum) atau jika piksel tersebut memiliki intensitas kekuatan edge yang lebih besar dari Low-Threshold dan terhubung dengan piksel yang nilainya lebih besar dari High-Threshold.
2.8 Elemen-elemen Citra Digital
Citra digital mengandung sejumlah elemen-elemen dasar, diantaranya adalah sebagai berikut.
2.8.1 Kecerahan (brightness)
Kecerahan adalah kata lain untuk intensitas cahaya. Kecerahan pada sebuah titik (piksel) di dalam citra bukanlah intensitas yang sebenarnya, tetapi sebenarnya adalah intensitas rata-rata dari suatu area yang melingkupinya. Sistem visual manusia mampu menyesuaikan dirinya dengan tingkat kecerahan
(brightness level) mulai dari yang paling rendah sampai yang paling tinggi.
2.8.2 Kontras (contrast)
Kontras menyatakan sebaran terang (lightness) dan gelap (darkness)
2.8.3 Kontur (contour)
Kontur adalah keadaan yang ditimbulkan oleh perubahan intensitas padapiksel-pikselyang bertetangga. Karena adanya perubahan intensitas inilah mata kita mampu mendeteksi tepi-tepi (edge) objek di dalam citra.
2.8.4 Warna (color)
Warna adalah persepsi yang dirasakan oleh sistem visual manusia terhadappanjang gelombang cahaya yang dipantulkan oleh objek. Setiap warna mempunyai panjang gelombang (λ) yang berbeda. Warna merah mempunyai panjang gelombang paling tinggi, sedangkan warna ungu (violet) mempunyai panjang gelombang paling rendah.Warna-warna yang diterima oleh mata (sistem visual manusia) merupakan hasil kombinasi cahaya dengan panjang gelombang berbeda.
2.8.5 Bentuk (shape)
Shape adalah properti intrinsik dari objek tiga dimensi dengan pengertianbahwa shape merupakan properti intrinsik utama untuk sistem visual manusia. Manusia lebih sering mengasosiasikan objek dengan bentuknya ketimbang elemen lainnya (warna misalnya). Pada umumnya, citra yang dibentuk oleh mata merupakan citra dwimatra (2 dimensi), sedangkan objek yang dilihat umumnya berbentuk trimatra (3 dimensi). Informasi bentuk objek dapat diekstraksi dari citra pada permulaaan prapengolahan dan segmentasi citra. Salah satu tantangan utama pada computer vision adalah merepresentasikan bentuk, atau aspek-aspek penting dari bentuk.
2.8.6 Tekstur (texture)
Tekstur dicirikan sebagai distribusi spasial dari derajat keabuan didalam sekumpulan piksel-pikselyang bertetangga. Jadi, tekstur tidak dapat didefinisikan untuk sebuah piksel. Sistem visual manusia pada hakikatnya tidak menerima informasi citra secara independen pada setiap piksel, melainkan suatu citra dianggap sebagai suatu kesatuan. Resolusi citra yang diamati ditetapkan oleh skala pada mana tekstur tersebut dipersepsi.
2.9 Video Digital
Video digital pada dasarnya tersusun atas serangkaian frame. Rangkaianframe tersebut ditampilkan pada layar dengan kecepatan tertentu, tergantung pada frame rate yang diberikan (dalam frame/second). Jika frame rate
cukup tinggi, mata manusia tidak dapat menangkap gambar atau frame, melainkan menangkapnya sebagai rangkaian yang kontinyu (video). Masing-masing frame
merupakan citra digital. Suatu citra digital direpresentasikan dengan sebuah matriks yang masing-masing elemennya merepresentasikan nilai intensitas.
Jika I adalah matriks dua dimensi, I (x,y) adalah nilai intensitas yang sesuai pada posisi baris x dan kolom y pada matriks tersebut. Titik-titik ditempatkan image di sampling disebut picture elements, atau sering dikenal sebagai piksel. Karakteristrik suatu video digital ditetapkan oleh resolusi
(resolution) atau frame dimention, piksel depth, dan frame rate.
2.9.1 Resolusi
Resolusi (resolution) atau frame dimention adalah ukuran sebuah
2.9.2 Bit Depth
Bit Depth mendeteksi jumlah bit yang digunakan untuk merepresentasikan tiap piksel pada sebuah frame. Kedalam bit dinyatakan dalam bit/piksel. Semakin banyak jumlah bit yang digunakan untuk merepresentasikan sebuah piksel, yang berarti semakin tinggi kedalaman piksel-nya, maka semakin baik pula kualitasnya, dengan konsekuensi jumlah bit yang diperlukan menjadi lebih tinggi. Dengan 1
byte (8bit) untuk tiap piksel, diperoleh 256 level intensitas.
Dengan level intensitas sebanyak itu, umumnya mata manusia sudah dapat dipuaskan. Kedalaman piksel paling rendah terdapat pada binary value image
yang hanya menggunakan 1 bit/piksel, sehingga hanya ada dua kemungkinan bagi tiap piksel, yaitu 0 untuk hitam dan 1 untuk putih. Pada kenyataannya semakin sedikit jumlah bit yang digunakan untuk tiap piksel, maka kualitas gambar akan semakin turun.
2.9.3 Frame Rate
tinggi, setidaknya sesuai dengan mata manusia, yang berarti membutuhkan jumlah
bit yang lebih tinggi.
2.10 Cross Correlation (Korelasi Silang)
Korelasi silang adalah metode standar untuk memperkirakan sejauh mana dua seri saling berkorelasi. Misalnya dengan mempertimbangkan dua seri x (i) dan y (i), dimana i = 0,1,2 ... N-1. Korelasi silang didefinisikan sebagai berikut [13].
�= [ − ∗ − − ]
− 2 − − 2 ……… (2.13)
Dimana, mx dan my merupakan hubungan seri yang sesuai dan d merupakan delay (lama penundaaan).
2.11 Logika Fuzzy
Logika Fuzzy pertama kali dicetuskan oleh Lotfi Zadeh dari Universitas Berkeley, California pada tahun 1965. Logika Fuzzy adalah “Suatu sistem yang digunakan untuk menangani konsep kebenaran parsial yaitu kebenaran yang berada diantara sepenuhnya benar dan sepenuhnya salah” (Yan, Jun. 1994;14). Logika Fuzzy berbeda dengan logika digital biasa, dimana logika digital biasanya hanya mengenal dua keadaan yaitu “ya”-“tidak” atau “on”-“off” atau “high” -“low” atau “1”-“0”. Logika Fuzzy menggantikan logika Boolean dalam tingkat
kebenaran..Sistem logika yang merupakan perluasan dari logika
2.11.1 Himpunan Fuzzy
Himpunan Fuzzy adalah suatu kumpulan atau koleksi objek-objek yang mempunyai kesamaan sifat tertentu. Himpunan Fuzzy merupakan suatu pengembangan lebih lanjut tentang konsep himpunan dalam matematika. Arti lain himpunan Fuzzy adalah rentang nilai-nilai, masing-masing nilai mempunyai derajat keanggotaan antara 0 sampai dengan 1. Himpunan Fuzzy memiliki 2 atribut, yaitu:
a. Linguistik, yaitu penamaan suatu grup yang mewakili suatu keadaan atau kondisi tertentu dengan menggunakan bahasa alami, seperti sepi, sedang, dan padat.
b. Numerik, suatu nilai (angka) yang menunjukkan ukuran dari suatu variabel seperti 5, 10, dan 15.
Beberapa hal yang perlu diketahui dalam memahami Fuzzy, yaitu:
a. Variable Fuzzy, merupakan variabel yang hendak dibahas dalam suatu sistem Fuzzy. Contoh: umur, temperature, permintaan, dan lain sebagainya.
b. Semesta pembicaraan, merupakan keseluruhan nilai yang diperbolehkan untuk dioperasikan dalam suatu variabel Fuzzy. Semesta pembicaraan merupakan himpunan bilangan real yang senantiasa naik (bertambah) secara monoton dari kiri ke kanan. Nilai semesta pembicaraan dapat berupa bilangan positif maupun negatif.
c. Domain himpunan Fuzzy, merupakan keseluruhan nilai yang diijinkan dalam semesta pembicaraan dan boleh dioperasikan dalam suatu himpunan
bilangan real yang senantiasa naik (bertambah) secara monoton dari kiri ke kanan. Nilai domain dapat berupa bilangan positif dan bilangan negatif.
2.11.2 Fungsi Keanggotaan Fuzzy (Membership Function)
Fungsi keanggotaan adalah suatu kurva yang menunjukkan pemetaan titik-titik input data kedalam nilai keanggotaannya (sering juga disebut dengan derajat keanggotaan) yang memiliki interval antara 0 sampai 1. Fungsi keanggotaan
Fuzzy berguna untuk mendapatkan nilai keanggotaan dan digunakan sebagai perhitungan input output sistem. Ada 2 (dua) fungsi keanggotaan Fuzzy yang digunakan dalam tugas akhir ini, yaitu :
a. Representasi Linier Kurva Segitiga
Kurva segitiga pada dasarnya merupakan gabungan antara 2 garis (linier) seperti terlihat pada Gambar 2.3.
Fungsi keanggotaan dari representasi kurva segitiga adalah :
=
a = nilai domain terkecil yang mempunyai derajat keanggotaan nol b = nilai domain yang mempunyai derajat keanggotaan satu
Gambar 2.3 Representasi Kurva Segitiga [7] b. Representasi Kurva Trapesium
Pada dasarnya kurva trapesium hampir sama dengan kurva segitiga, akan tetapi ketika nilai domain telah mencapai derajat keanggotaan tertinggi terjadi nilai domain dengan nilai sama untuk beberapa saat kemudian nilai domain turun kembali menuju derajat keanggotaan terendah, seperti terlihat pada Gambar 2.4.
Gambar 2.4 Representasi Kurva Trapesiumm [7] Fungsi keanggotaan dari representasi kurva trapezium adalah :
, , , , =
x = nilai input yang akan diubah ke dalam bilangan Fuzzy
2.11.3 Operasi Logika Fuzzy
Operasi logika adalah operasi yang mengkombinasikan dan memodifikasi 2 atau lebih himpunan Fuzzy. Nilai keanggotaan baru hasil operasi dua himpunan disebut firing strength atau αpredikat, ada 3 operasi dasar yang diciptakan oleh Zadeh:
Operator AND, berhubungan dengan operasi intersection pada himpunan, α predikat diperoleh dengan mengambil nilai minimum antar kedua
himpunan.
= min( , )………. (2.18)
Operator OR, berhubungan dengan operasi union pada himpunan, α
predikat diperoleh dengan mengambil nilai maximum antar kedua himpunan.
= max( , )………. (2.19)
Operasi NOT, berhubungan dengan operasi komplemen pada himpunan, αpredikat diperoleh dengan mengurangkan nilai keanggotaan elemen pada
himpunan dari 1.
′ = 1− ……… (2.20)
2.11.4 Tahapan Membangun Sistem Fuzzy
Gambar 2.5 Proses Sistem Fuzzy [11] a. Fuzzification
Proses Fuzzification berfungsi untuk mengubah nilai suatu masukan menjadi suatu fungsi keanggotaan Fuzzy. Pada proses ini Membership Function sudah ditetapkan.
b. Fuzzy Logic Inference
Proses ini berfungsi untuk mengaplikasikan aturan (Fuzzy Rule) pada masukan Fuzzy yang dihasilkan dalam proses Fuzzification dan mengevaluasi tiap aturan dengan masukan yang dihasilkan dari proses
Fuzzyfikasi dengan mengevaluasi hubungan atau derajat keanggotaannya. c. Defuzzification
Proses Defuzzification merupakan pengubahan kembali data-data Fuzzy
kembali kebentuk numeric yang dapat dikirimkan ke peralatan pengendalian. Proses Defuzzification dapat dilakukan dengan beberapa cara, diantaranya [11:
FUZZIFIKASI Fuzzy Logic Inference DEFUZZIFIKASI
MASUKAN (INPUT)
= ′ ′ ………... (2.23)
2.11.5 Fuzzy Inference System
Sistem Inferensi Fuzzy (Fuzzy Inference System/FIS) disebut juga Fuzzy Inference Engine adalah sistem yang dapat melakukan penalaran dengan prinsip serupa seperti manusia melakukan penalaran dengan nalurinya. Ada banyak jenis FIS, tetapi yang paling terkenal adalah Mamdani dan Sugeno, karena paling mudah dimengerti daripada FIS yang lainya.
a. FIS Mamdani
FIS Mamdani adalah FIS yang paling mudah dimengerti, karena paling sesuai dengan naluri manusia. Metode ini diperkenalkan oleh Ebrahim Mamdani pada tahun 1975. FIS mamdani bekerja berdasarkan kaidah-kaidah linguistik dan memiliki algoritma Fuzzy yang menyediakan sebuah aproksimasi untuk dimasuki analisa matematik.
Gambar 2.6 FIS Mamdani [11] b. FIS Sugeno
konstanta atau persamaan linier. Metoda ini diperkenalkan oleh Takagi-Sugeno Kang pada tahun 1985.
Gambar 2.7 FIS Sugeno [11]
2.12 Komunikasi Serial
Komunikasi serial adalah komunikasi yang mengantarkan data digital secara bit per bit secara bergantian melalui media interface serial. Pengiriman data melalui interface serial dapat dilakukan secara bit per bit (setiap satu step waktu → bit) atau juga dalam satuan baud dimana 1 baud tidak mesti senilai dengan 1
bit per second, tergantung besar data untuk setiap clock transfer. Dalam tugas akhir ini penulis menggunakan komunikasi serial RS232.
Komunikasi Serial RS232
Standard RS232 mendeteksi jenis-jenis sinyal yang dipakai mengatur pertukaran informasi antara DTE dan DCE, semuanya terdapat 24 jenis sinyal tapi yang umum dipakai hanyalah 9 jenis sinyal. Konektor yang dipakai pun
ditetapkan dalam standard RS232, untuk sinyal yang lengkap dipakai konektor DB25, sedangkan konektor DB9 hanya bisa dipakai untuk 9 sinyal yang umum dipakai.
Gambar 2.8 Konektor DB9 [14]
Tabel 2.1 Fungsi Pin Konektor DB9
Pin DB9 Singkatan Keterangan Fungsi
Pin 3 TD Transmit Data Untuk pengiriman data serial (TDX) Pin 2 RD Receive Data Untuk penerimaan data serial (RDX)
Pin 7 RTS Request To
Send
Sinyal untuk menginformasikan modem bahwa UART siap melakukan pertukaran data
Pin 8 CTS Clear To Send Digunakan untuk memberitahukan bahwa modem siap untuk melakukan pertukaran data
Pin 6 DSR Data Set
Ready
Memberitahukan UART bahwa modem siap untuk melakukan pertukaran data
Pin 5 SG Signal Ground
Pin 1 CD Carrier Detect Saat modem mendeteksi suatu
carrier dari modem lain maka sinyal ini akan diaktifkan
Pin 4 DTR Data Terminal Ready
Kebalikan dari DSR untuk memberitahukan bahwa UART siap melakukan hubungan komunikasi Pin 9 RI Ring Indikator Akan aktif jika modem mendeteksi
Sinyal-sinyal tersebut ada yang menuju ke DCE ada pula yang berasal dari DCE. Bagi sinyal yang menuju ke DCE artinya DTE berfungsi sebagai output dan DCE berfungsi sebagai input, misalnya sinyal TD, pada sisi DTE kaki TD adalah output, dan kaki ini dihubungkan ke kaki TD pada DCE yang berfungsi sebagai input. Kebalikan sinyal TD adalah RD, sinyal ini berasal dari DCE dan dihubungkan ke kaki RD pada DTE yang berfungsi sebagai output.
Komunikasi serial RS232 memiliki level tegangan yang berkisar antara -25 volt sampai +-25 volt. Oleh karena itu, dalam menghubungkan keduanya harus dilakukan konversi level tegangan dari level TTL menjadi RS232 dan begitu pula sebaliknya. Konverter level tegangan RS232 yang biasa digunakan adalah IC MAX232. IC MAX232 memiliki 16 buah pin dengan pin 16 sebagai VCC 5 volt dan pin 15 GND. Pin 8 dan 13 sebagai input receiver dari RS232, sedang pin 7 dan pin 14 sebagai output transmitter RS232
Berikut ini adalah konfigurasinya:
2.13 Mikrokontroler
Mikrokontroler adalah sebuah chip yang berfungsi sebagai pengontrol rangkaian elektronik dan umunya dapat menyimpan program didalamnya. Mikrokontroler umumnya terdiri dari CPU (Central Processing Unit), memori, I/O tertentu dan unit pendukung seperti Analog-to-Digital Converter (ADC) yang sudah terintegrasi di dalamnya.
Gambar 2.10 ATmega8535
Atmega8535 merupakan mikrokontroller AVR yang memiliki arsitektur RISC 8 Bit, sehingga semua instruksi dikemas dalam kode 16-bit (16-bits word) dan sebagian besar instruksi dieksekusi dalam satu siklus instruksi clock. Dan ini sangat membedakan sekali dengan instruksi MCS-51 (Berarsitektur CISC) yang membutuhkan siklus 12 clock. RISC adalah Reduced Instruction Set Computing
Fitur ATMega8535
Sistem processor 8 bit berbasis RISC dengan kecepatan maksimal 16
MHz.
Ukuran memory flash 8KB, SRAM sebesar 512 byte, EEPROM sebesar
512 byte.
ADC internal dengan resolusi 10 bit sebanyak 8 channel
Port komunikasi serial USART dengan kecepatan maksimal 2.5 Mbps
Mode Sleep untuk penghematan penggunaan daya listrik
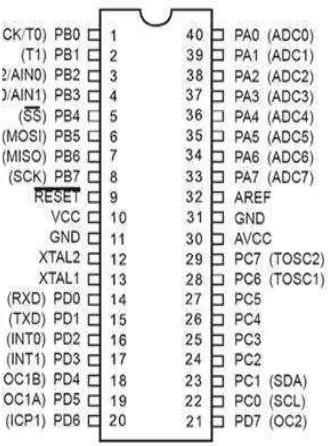
Konfigurasi Pin ATMega8535
Gambar 2.11 Konfigurasi Pin ATmega8535
VCC merupakan Pin yang berfungsi sebagai pin masukan catudaya
GND merupakan Pin Ground
Port A (PA0...PA7) merupakan pin I/O dan pin masukan ADC
Port B (PB0...PB7) merupakan pin I/O dan pin yang mempunyai fungsi
Port C (PC0...PC7) merupakan port I/O dan pin yang mempunyai fungsi
khusus, yaitu komparator analog dan Timer Oscillator
Port D (PD0...PD1) merupakan port I/O dan pin fungsi khusus yaitu
komparator analog dan interrupt eksternal serta komunikasi serial
RESET merupakan pin yang digunakan untuk mereset mikrokontroler
XTAL1 dan XTAL2 merupakan pin masukan clock eksternal
AVCC merupakan pin masukan untuk tegangan ADC
AREF merupakan pin masukan tegangan referensi untuk ADC
Arsitektur ATMega8535
Saluran IO sebanyak 32 buah, yaitu Port A, Port B, Port C dan Port D
ADC 10 bit sebanyak 8 Channel
Tiga buah timer / counter
32 register
Watchdog Timer dengan oscilator internal
SRAM sebanyak 512 byte
Memori Flash sebesar 8 kb
Sumber Interrupt internal dan eksternal
Port SPI (Serial Pheriperal Interface)
EEPROM on board sebanyak 512 byte
Komparator analog
Port USART (Universal Shynchronous Ashynchronous Receiver
2.14 LED
LED adalah singkatan dari Light Emiting Dioda, merupakan komponen yang dapat mengeluarkan emisi cahaya. LED merupaan produk temuan lain setelah diode. Strukturnya juga sama dengan diode, tetapi belakangan ditemukan bahwa electron yang menerjang sambungan P-N juga melepaskan energi berupa energi panas dan energy cahaya. LED dibuat agar lebih efesien jika mengeluarkan cahaya. Untuk mendapatkan emisi cahaya pada semikonduktor, doping yang dipakai adalah galium, arsenic, dan phosphorus. Jenis doping yang berbeda menghasilkan warna cahaya yang berbeda pula.
36 BAB III
PERANCANGAN ALAT DAN PEMBUATAN SIMULASI
Perancangan dan realisasi sistem merupakan bagian yang terpenting dalam seluruh pembuatan tugas akhir ini. Pada bab ini akan di jelaskan tentang pembuatan simulasi di MATLAB dan pembuatan hardware berupa miniature lampu lalu lintas.
3.1 Perancangan Sistem
Secara umum, perancangan dan pembuatan simulasi ini terdiri dari tiga bagian utama, yaitu masukan (input), proses dan keluaran (output) seperti yang terlihat pada Gambar 3.1 dibawah ini. Setiap bagian dari sistem mempunyai fungsi masing-masing yang akan saling berkaitan dalam pengontrolan lampu lalu lintas ini.
Gambar 3.1 Blok Diagram Sistem
Pada Gambar 3.1 memperlihatkan bagian-bagian dari perancangan sistem pengembangan algoritma pengolahan citra untuk mengontrol kepadatan lalu lintas pada persimpangan dua arah berbasis logika Fuzzy, yang meliputi beberapa bagian penting, yaitu:
a. bagian masukan (input)
Masukan (input) terdiri dari 2 (dua) yaitu hasil capture dari jalur 1 dan hasil capture dari jalur 2. Kedua masukan (input) ini disebut juga sebagai masukan awal untuk pengembangan algoritma pengolahan citra dalam pengontrolan kepadatan lalu lintas pada persimpangan dua arah berbasis logika Fuzzy ini. Dan kedua masukan ini nantinya akan diproses dengan software MATLAB untuk mendeteksi jumlah kendaraan dari hasil capure dari masing-masing jalur.
b. bagian proses
MATLAB merupakan software utama untuk mengolah hasil
capture dari masing-masing jalur untuk mendeteksi jumlah kendaraan. Pendeteksian jumlah kendaraan dilakukan dengan cara membandingkan background dengan hasil capture dan dilanjutkan ke proses segmentasi. Setelah jumlah kendaraan dari masing-masing jalur didapat, maka dilanjutkan dengan proses logika Fuzzy yang mana prosesnya terdiri dari
minimum mikrokontroller ATmega8535 untuk penyalaan lampu lalu lintas.
c. bagian keluaran (output)
Bagian keluaran (output) ini merupakan hasil dari beberapa masukan (input) yang telah diproses pada bagian proses yang sudah dijelaskan sebelumnya. Output yang dihasilkan berupa kondisi-kondisi penyalaan lampu lalu lintas. Dalam sistem ini, lampu lalu lintas berada dalam dua tempat, yaitu yang pertama berada di dalam software MATLAB itu sendiri sebagai simulasi atau sebagai indikator untuk penyalaan lampu lalu lintas dan yang kedua berada di luar software atau berupa hardware
LED yang dihubungkan dengan komunikasi serial RS232 ke sistem minimum ATmega8535.
Untuk membuat Tugas Akhir ini dibutuhkan suatu simulator dan miniature dua persimpangan untuk pengaturan lampu lalu lintas. Simulator yang digunakan adalah simulator MATLAB R2009b seperti yang terlihat di Gambar 3.2 dibawah ini.
Sistem miniature lampu lalu lintas atau prototype, dimana sistem miniature ini hampir menyerupai sistem lampu lalu lintas aslinya. Dalam sistem miniature ini terdapat lampu lalu lintas di masing-masing jalur sebagai output dan kamera USB di masing-masing jalur sebagai masukan untuk pengambilan gambar (capture).
Gambar 3.3 Tampilan Miniature
Hasil capture akan diproses untuk mendeteksi dan mengetahui jumlah kendaraan yang ada di masing-masing jalur dan terdapat juga output berupa led
sebagai lampu lalu lintas sebagai indikator untuk penyalaan lampu yang dihubungkan dengan menggunakan komunikasi serial RS232 ke sistem minimum ATmega8535.
3.2 Perancangan Software
capture tersebut. Untuk mengetahui berapa jumlah kendaraan dari hasil capture
dilakukan beberapa pemrosesan antara lain, konversi citra asli ke grayscale, konversi citra grayscale ke biner, deteksi tepi menggunakan edge detection Canny, proses segmentasi, dan penentuan jumlah kendaraan.
3.2.1 Konversi Citra Asli ke Grayscale
Pada tahap ini citra asli hasil capture akan dikonversikan ke bentuk mode warna yang lain yaitu mode warna graycale, hal ini bertujuan untuk menyederhanakan informasi-informasi warna yang terdapat pada ketiga layer matriks warna yakni Red, Green, and Blue (RGB) menjadi satu layer yang bernilai dari perkalian ketiga layer matriks warna tersebut dengan konstanta atau dengan cara melakukan rata-rata dari ketiga matriks.
Gambar 3.4a Citra Asli Gambar 3.4b Citra Grayscale
Perubahan format citra asli (gambar 3.4a) menjadi format grayscale
Gambar 3.5 Citra Grayscale Bernilai Antara 0 Sampai 1
3.2.2 Konversi ke Biner
Pada tahap ini citra yang telah melalui tahap konversi ke bentuk grayscale
akan dilakukan konversi kembali kebentuk biner, tahap konversi ini sangatlah penting mengingat dalam proses pengolahan selanjutnya akan dilakukan proses pengolahan citra yang bernilai 1 dan 0.
Gambar 3.6a Citra Grayscale Gambar 3.6b Citra Biner Perubahan format grayscale (Gambar3.6a) menjadi format biner (Gambar 3.6b) mengalami perubahan nilai. Dimana saat format gambar masih
grayscale nilainya antara 0 – 1, tetapi saat format gambar sudah menjadi biner nilainya menjadi 0 dan 1, dimana gambar yang berwarna putih mempunyai nilai 1 dan gambar yang berwarna hitam mempunyai nilai 0.
3.2.3 Deteksi Tepi dengan Metode Canny Edge Detection
Pada tahap ini citra yang telah melalui tahap konversi ke bentuk biner akan dilakukan pendetesian tepi dengan menggunakan metode canny edge detection
untuk mengurangi noise sebelum melakukan perhitungan deteksi tepi sehingga tepi-tepi yang dihasilkan lebih banyak.
Gambar 3.8a Citra Biner Gambar 3.8b Canny Edge Detection
Pendeteksian tepi akan mempermudah untuk mendeteksi jumlah kendaraan. Hal ini dikarenakan nilai-nilai setiap piksel dari gambar yang sudah dideteksi tepi tegas, sehingga sulit untuk mendeteksi nilai bernilai 1 dan bernilai 0.
Gambar 3.9 Pendeteksian tepi bernilai 1 dan bernilai 0
3.2.4 Proses Segmentasi
mendeteksi jumlah objek yang ada bersama background atau latar. Proses segmentasi dalam tugas akhir ini adalah hanya sebagai window atau segmen untuk melihat kendaraan, dimana 1 window atau segmen hanya untuk melihat 1 kendaraan. Berarti dalam 1 gambar terdapat 18 window atau 18 segment, sehingga maksimum jumlah kendaraan yang terhitung ada sebanyak 18 kendaraan.
Gambar 3.10 Proses Segmentasi
3.2.5 Pendeteksian Jumlah Kendaraan
Penentuan jumlah kendaraan ditentukan berdasarkan perbandingan
background dengan hasil capture yang sudah ada objeknya dengan proses image processing. Tahapan ini sangatlah penting untuk melanjutkan ke tahapan berikutnya, karena jumlah kendaraan yang sudah didapat akan menjadi masukan (input) untuk proses logika Fuzzy.
Gambar 3.11 Background, Citra Asli, dan Hasil Deteksi
Jumlah objek dari hasil capture ada sebanyak 2. Setelah dilakukan proses segmentasi dan perbandingan background dengan hasil capture maka jumlah yang terdeteksi ada sebanyak 2.
3.3 Logika Fuzzy
Perancangan sistem kontrol berbasis logika Fuzzy, memerlukan beberapa tahapan yaitu pembentukan himpunan Fuzzy, penentuan fungsi keanggotaan, dan penentuan basis aturan atau kaidah Fuzzy. Metode yang digunakan dalam tugas akhir ini adalah metode FIS sugeno.
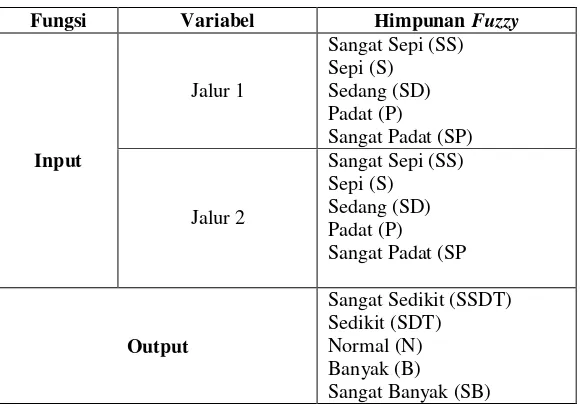
3.3.1 Pembentukan Himpunan Fuzzy
Jumlah kendaraan yang sudah didapat dari masing-masing jalur dibagi menurut kepadatan. Kondisi-kondisi kepadatan untuk jalur 1 sama dengan kondisi-kondisi kepadatan untuk jalur 2, yakni sangat sepi, sepi, sedang, padat, dan sangat padat, sedangkan untuk output adalah sangat sedikit, sedikit, normal, banyak, dan sangat banyak.
Tabel 3.1 Himpunan Fuzzy Fungsi Variabel Himpunan Fuzzy
3.3.2 Fungsi Keanggotaan
Fungsi keanggotaan berguna untuk proses perubahan nilai input umum ke dalam bentuk input Fuzzy, dengan derajat keanggotaan µ(x) yang bernilai antara 0 sampai 1 pada himpunan Fuzzy. Digunakan fungsi kurva segitiga dan kurva trapesium untuk mempresentasikannya.
Gambar 3.12 Membership Function Untuk Jalur 1
Gambar 3.13 Membership Function Untuk Jalur 2
3.3.3 Basis Kaidah Fuzzy (Fuzzy Rule Base)
Basis Kaidah Fuzzy (Fuzzy Rule Base) merupakan himpunan implikasi-implikasi yang berlaku sebagai aturan dalam sistem. Aturan Fuzzy ditetapkan
terlebih dahulu agar sistem kontrol Fuzzy sesuai dengan keadaan. Kaidah atau rule
yang digunakan adalah :
IF (anteseden 1) AND (anteseden 2) THEN (konsekuen)
Tabel 3.2 Aturan Fuzzy Untuk Kedua Jalur
Dari Tabel 3.2 di bawah ini, dapat dibuat 25 rule atau aturan Fuzzy yang nanti digunakan dalam proses inferensi, sebagai berikut:
Rule 1 : IF jumlah kendaraan jalur 1 Sangat Sepi AND jumlah kendaraan jalur 2 Sangat Sepi THEN N
Rule 2 : IF jumlah kendaraan jalur 1 Sangat Sepi AND jumlah kendaraan jalur 2 Sepi THEN output SDT
Rule 3 : IF jumlah kendaraan jalur 1 Sangat Sepi AND jumlah kendaraan jalur 2 Sedang THEN output SDT
Rule 4 : IF jumlah kendaraan jalur 1 Sangat Sepi AND jumlah kendaraan jalur 2 Padat THEN output SSDT
Rule 5 : IF jumlah kendaraan jalur 1 Sangat Sepi AND jumlah kendaraan jalur 2 Sangat Padat THEN output SSDT
dan seterusnya
Keterangan :
SS = sangat sepi, S = sepi, SD = sedang, P = padat, SP = sangat padat
SSDT = sangat sedikit, SDT = sedikit, N = normal, B = banyak, SB =
sangat banyak
sangat sedikit terjadi apabila,
1. jalur 1 ‘SS’ dan jalur 2 ‘S’ 2. jalur 1 ‘SS’ dan jalur 2 ‘SD’ 3. jalur 1 ‘S’ dan jalur 2 ‘SD’ 4. jalur 1 ‘SD’ dan jalur 2 ‘SS’ 5. jalur 1 ‘SD’ dan jalur 2 ‘S’ 6. jalur 1 ‘SD’ dan jalur 2 ‘P
normal terjadi apabila,
1. jalur 1 ‘SS’ dan jalur 2 ‘SS’ 2. jalur 1 ‘S’ dan jalur 2 ‘S’ 3. jalur 1 ‘SD’ dan jalur 2 ‘SD’ 4. jalur 1 ‘P’ dan jalur 2 ‘P’ 5. jalur 1 ‘P’ dan jalur 2 ‘SP’ 6. jalur 1 ‘SP’ dan jalur 2 ‘P’ 7. jalur 1 ‘SP’ dan jalur 2 ‘SP’
banyak terjadi apabila,
1. jalur 1 ‘S’ dan jalur 2 ‘SS’ 2. jalur 1 ‘P’ dan jalur 2 ‘SD’ 3. jalur 1 ‘SP’ dan jalur 2 ‘SD’
sangat banyak terjadi apabila,
3.3.4 Kondisi Penyalaan Lampu lalu lintas
Kondisi penyalaan lampu lalu lintas ditetapkan berdasarkan output dari proses defuzzifikasi dalam proses Fuzzy. Penentuan kondisi penyalaan lampu lalu lintas ada sebanyak 5 (lima) kondisi, antara lain kondisi 1, kondisi 2, kondisi 3, kondisi 4, dan kondisi 5. Berikut kondisi-kondisi penyalaan lampu lalu lintas.
Tabel 3.3 Kondisi Penyalaan Lampu Lalu Lintas
Output Defuzzifikasi Status Kondisi 5 ≤ output defuzzifikasi < 21 Kondisi 1 21 ≤ output defuzzifikasi < 41 Kondisi 2 41 ≤ output defuzzifikasi < 61 Kondisi 3 61 ≤ output defuzzifikasi < 81 Kondisi 4 81 ≤ output defuzzifikasi < 101 Kondisi 5
Adapun lama waktu nyala lampu lalu lintas untuk masing-masing kondisi adalah sebagai berikut.
1. Nyala lampu lalu lintas untuk kondisi 1:
Tabel 3.4 Lama Waktu Kondisi 1
Jalur 1 Merah Hijau Kuning Merah
Jalur 2 Hijau kuning Merah
Waktu 10 detik 2 detik 1 detik 70 detik 2 detik 1 detik
2. Nyala lampu lalu lintas untuk kondisi 2:
Tabel 3.5 Lama Waktu Kondisi 2
Jalur 1 Merah Hijau Kuning Merah
Jalur 2 Hijau kuning Merah
3. Nyala lampu lalu lintas untuk kondisi 3:
Tabel 3.6 Lama Waktu Kondisi 3
Jalur 1 Merah Hijau Kuning Merah
Jalur 2 Hijau kuning Merah
Waktu 40 detik 2 detik 1 detik 40 detik 2 detik 1 detik
4. Nyala lampu lalu lintas untuk kondisi 4:
Tabel 3.7 Lama Waktu Kondisi 4
Jalur 1 Merah Hijau Kuning Merah
Jalur 2 Hijau kuning Merah
Waktu 50 detik 2 detik 1 detik 20 detik 2 detik 1 detik
5. Nyala lampu lalu lintas untuk kondisi 5:
Tabel 3.8 Lama Waktu Kondisi 5
Jalur 1 Merah Hijau Kuning Merah
Jalur 2 Hijau kuning Merah
Waktu 70 detik 2 detik 1 detik 10 detik 2 detik 1 detik
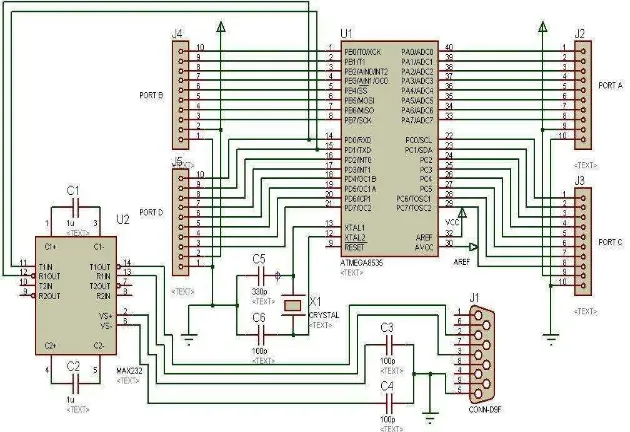
Gambar 3.15 Skematik Sistem Minimum ATmega8535
3.5 Rangkaian Lampu Lalu Lintas
Pada tugas akhir ini, led digunakan sebagai lampu lalu lintas yang terdiri dari merah, kuning, dan hijau. Posisi lampu lalu lintas ini berada di persimpangan jalur 1 dan persimpangan jalur 2. Apabila lampu lalu lintasdi jalur 1 merah maka lampu lalu lintasdi jalur 2 hijau, dan sebaliknya.
Gambar 3.16 Skematik Lampu Lalu Lintas
Berikut sekematik keseluruhan sistem minimum ATmega8535 dengan keluaran berupa led sebagai lampu lalu lintas.
Gambar 3.17 Skematik Gabungan Sistem Minimum ATmega8535 dengan Lampu Lalu Lintas
3.6 Perancangan Perangkat Lunak Sistem
Tahapan untuk sistem pengembangan algoritma pengolahan citra untuk mengontrol kepadatan lalu lintas pada persimpangan dua arah berbasis logika
Fuzzy ini menggunakan MATLAB 2009b yang mana terhubung dengan komunikasi serial RS232 ke sistem minimum untuk menyalakan output led
Gambar 3.18 Flowchart Sistem Pengembangan Algoritma Pengolahan Citra Untuk Mengontrol Kepadatan Lalu Lintas pada Persimpangan Dua Arah Berbasis
Logika Fuzzy
correlation, terlebih dahulu hasil capture disegmentasi. Hal ini bertujuan untuk mempermudah dalam membandingkan hasil capture dengan background untuk mendeteksi jumlah kendaraan.
Setelah didapat jumlah kendaraan, maka dilanjutkan ke sistem logika
Fuzzy dengan proses fuzzifikasi, fuzzy logic inference, dan defuzzifikasi. Output
55
Pada bab ini akan diuraikan tentang proses pengujian sistem yang akan dibuat. Pengujian akan dilakukan dengan 2 (dua) cara, yaitu pengujian secara parsial dan pengujian secara keseluruhan.
4.1 Pengujian Sistem Secara Parsial
Pengujian secara parsial ini digunakan untuk mengetahui proses dari masing-masing sistem yang akan dibuat. Terdapat beberapa blok sistem yang akan dibuat, yaitu:
1. pemasangan kamera USB dan pengambilan gambar (capture), 2. image processing untuk mendeteksi jumlah kendaraan,
3. pengujian Logika Fuzzy,
4. penentuan kondisi-kondisi penyalaan lampu lalu lintas,
5. hubungan komunikasi serial dengan sistem minimum ATmega8535 dan lampu lalu lintas.
4.1.1 Pemasangan Kamera dan Pengambilan Gambar (Capture)
berada di tengah-tengah jalur agar gambar yang ditangkap oleh kamera lebih baik dan lebih terfokus, seperti yang terlihat pada Gambar 4.1 di bawah ini.
Gambar 4.1 Letak Kamera di Jalur 1 dan Jalur 2
Pengambilan gambar (capture) dilakukan agar mempermudah image processing. Hasil capture inilah yang menjadi inputan awal untuk melanjutkan ke tahap selanjutnya.
Gambar 4.2 Hasil Capture
4.1.2 Image Processing Untuk Mendeteksi Jumlah Kendaraan
Hasil dari pengujian image processing ini merupakan jumlah kendaraan yang dideteksi dari hasil capture. Hasil capture ini sudah di crop secara otomatis guna mengurangi noise yang ditangkap oleh kamera. Proses image processing
kendaraan. Hal ini juga dilakukan karena intensitas cahaya diberbagai tempat berbeda-beda. Berikut hasil pendeteksian kendaraan dari masing-masing hasil
capture.
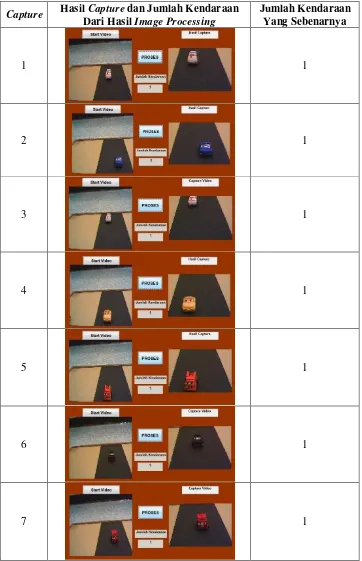
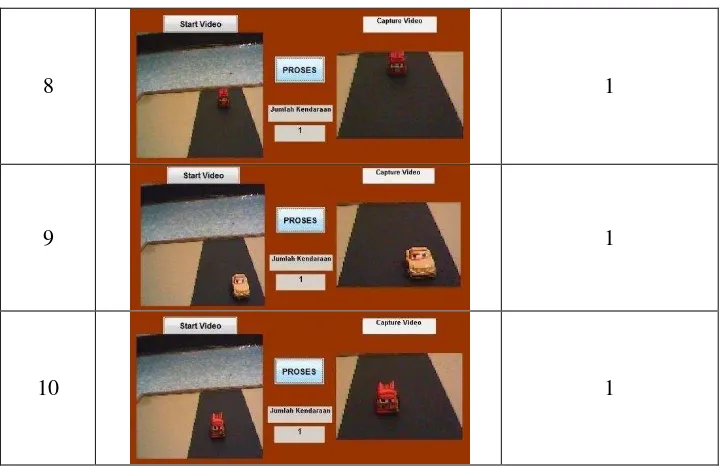
Tabel 4.1 Pendeteksian dengan Jumlah Kendaraan 1
Capture Hasil Capture dan Jumlah Kendaraan
Dari Hasil Image Processing
Jumlah Kendaraan Yang Sebenarnya
1 1
2 1
3 1
4 1
5 1
6 1
8 1
9 1
10 1
Hasil percobaan dari dilakukan 10 kali percobaan untuk pendeteksian kendaraan dengan jumlah kendaraan 1 memiliki tingkat keberhasilan 100%.
Tabel 4.2 Pendeteksian dengan Jumlah Kendaraan 2
Capture Hasil Capture dan Jumlah Kendaraan
Dari Hasil Image Processing
Jumlah Kendaraan Yang Sebenarnya
1 2
2 2
4 2
5 2
6 2
7 2
8 2
9 2
10 2
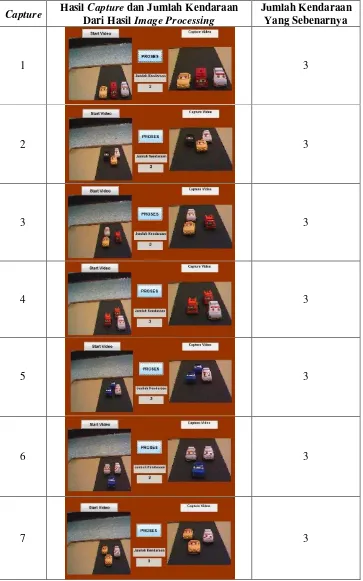
Tabel 4.3 Pendeteksian dengan Jumlah Kendaraan 3
Capture Hasil Capture dan Jumlah Kendaraan
Dari Hasil Image Processing
Jumlah Kendaraan Yang Sebenarnya
1 3
2 3
3 3
4 3
5 3
6 3
8 3
9 3
10 3
Hasil percobaan untuk jumlah kendaraan 3, memiliki tingkat keberhasilan 80% dalam 10 kali percobaan dengan error 20%. Ketidakakuratan pendeteksian ditunjukkan pada percobaan 1 dan percobaan 9. Hal ini dipengaruhi oleh intensitas cahaya, warna kendaraan, dan nilai threshold yang belum adaptif. Error
deteksi untuk jumlah kendaraan 3 berkisar ±1.
Tabel 4.4 Pendeteksian dengan Jumlah Kendaraan 4
Capture Hasil Capture dan Jumlah Kendaraan
Dari Hasil Image Processing
Jumlah Kendaraan Yang Sebenarnya
1 4
3 4
4 4
5 4
6 4
7 4
8 4
9 4
Sama halnya dengan jumlah kendaraan 3, untuk kendaraan jumlah 4 juga memiliki tingkat keberhasilannya 80% dari 10 kali percobaan dengan error 20%. Ketidakakuratan pendeteksian ditunjukkan pada percobaan 5 dan percobaan 9. Hal ini dipengaruhi juga oleh intensitas cahaya, warna kendaraan, dan nilai
threshold yang belum adaptif. Error deteksi untuk jumlah kendaraan 3 berkisar ±1.
Tabel 4.5 Pendeteksian dengan Jumlah Kendaraan 5
Capture Hasil Capture dan Jumlah Kendaraan
Dari Hasil Image Processing
Jumlah Kendaraan Yang Sebenarnya
1 5
2 5
3 5
4 5
6 5
7 5
8 5
9 5
10 5
Tabel 4.6 Pendeteksian dengan Jumlah Kendaraan 6
Capture Hasil Capture dan Jumlah Kendaraan
Dari Hasil Image Processing
Jumlah Kendaraan Yang Sebenarnya
1 6
2 6
3 6
4 6
5 6
6 6
8 6
9 6
10 6
Hasil percobaan untuk jumlah kendaraan 6, memiliki tingkat keberhasilannya 90% dari 10 kali percobaan dengan error 10%. Ketidakakuratan pendeteksian ditunjukkan pada percobaan 10. Hal ini dipengaruhi oleh intensitas cahaya, warna kendaraan, dan nilai threshold yang belum adaptif. Error deteksi untuk jumlah kendaraan 3 berkisar ±1.
Tabel 4.7 Pendeteksian dengan Jumlah Kendaraan 7
Capture Hasil Capture dan Jumlah Kendaraan
Dari Hasil Image Processing
Jumlah Kendaraan Yang Sebenarnya
1 7
3 7
4 7
5 7
6 7
7 7
8 7
9 7
Hasil percobaan untuk jumlah kendaraan 7, memiliki tingkat keberhasilannya 80% dari 10 kali percobaan dengan error 20%. Ketidakakuratan pendeteksian ditunjukkan pada percobaan 5 dan percobaan 7. Hal ini dipengaruhi oleh intensitas cahaya, warna kendaraan, dan nilai threshold yang belum adaptif.
Error deteksi untuk jumlah kendaraan 3 berkisar ±1.
Tabel 4.8 Pendeteksian dengan Jumlah Kendaraan 8
Capture Hasil Capture dan Jumlah Kendaraan
Dari Hasil Image Processing
Jumlah Kendaraan Yang Sebenarnya
1 8
2 8
3 8
4 8
6 8
7 8
8 8
9 8
10 8
Hasil percobaan untuk jumlah kendaraan 8, memiliki tingkat keberhasilannya 80% dari 10 kali percobaan dengan error 20%. Ketidakakuratan pendeteksian ditunjukkan pada percobaan 3 dan percobaan 8. Hal ini dipengaruhi oleh intensitas cahaya, warna kendaraan, dan nilai threshold yang belum adaptif.
![Gambar 2.3 Representasi Kurva Segitiga [7]](https://thumb-ap.123doks.com/thumbv2/123dok/616788.74120/36.595.250.375.86.169/gambar-representasi-kurva-segitiga.webp)