Tugas Analisis Kawasan Frekuensi
1. Perhatikan sistem dengan fungsi alih
) 10 )( 2 )( 1 (
50 )
(
+ + + =
s s s s G
Jika masukan sistem adalah sinusoida 10 sin ωt, tentukan keluaran sistem untuk
frekuensi sebagai berikut
(a) ω = 0,1
(b) ω = 2
(c) ω = 40
2. Sketsalah diagram Bode dan diagram Nyquist untuk fungsi alih berikut
(a) 2
) 1 (
4 )
(
+ =
s s s G
(b)
) 1 )( 1 ( ) (
− + =
s s
s s
G
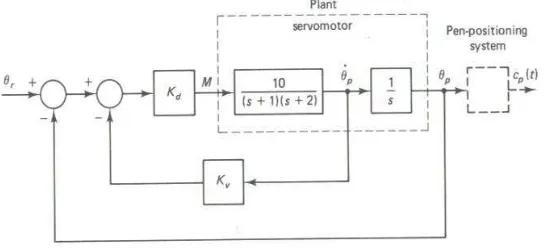
3. Gambar 1 berikut ini menunjukkan diagram balok sistem kontrol servo untuk sistem
ploter digital. Masukan θr adalah keluaran komputer, dan keluaran θp adalah
posisi poros servomotor.