Tugas akhir ini disusun untuk memenuhi salah satu syarat dalam menempuh pendidikan Program Sarjana di Program Studi Teknik Elektro
oleh :
OKTA RUSDIANSYAH RAMLAN 1.31.09.020
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
BANDUNG
2.3. Permasalahan Dalam Pengereman OtomatisError! Bookmark not defined. 2.4. Mikrokontroler AVR ATmega16 ... Error! Bookmark not defined. 2.5. Sensor Ultrasonik PING ... Error! Bookmark not defined. 2.6. Pulse Widht Mudulation (PWM) ... Error! Bookmark not defined. 2.7. Motor Penggerak Roda ... Error! Bookmark not defined. 2.7.1. Ilustrasi Sederhana Untuk Menguji Motor DC ... Error! Bookmark not defined.
2.8. DriverMotor L293D ... Error! Bookmark not defined. 2.9. Liquid Crystal Display (LCD) ... Error! Bookmark not defined. 2.10. Buzzer ... Error! Bookmark not defined. 2.11. Motor Servo ... Error! Bookmark not defined. 2.12. Perangkat Lunak (Software) ... Error! Bookmark not defined. 2.12.1. Bahasa C ... Error! Bookmark not defined. BAB III PEMILIHAN KOMPONEN DAN PERANCANGAN ALAT ... Error! Bookmark not defined.
3.1. Latar Belakang Pemilihan Komponen... Error! Bookmark not defined. 3.1.1. Pemilihan Jenis Mikrokontroler ... Error! Bookmark not defined. 3.1.2. Pemilihan Jenis Sensor Jarak ... Error! Bookmark not defined. 3.1.3. Pemilihan Jenis Liquid Crystal Display (LCD) Character 16x2 ... Error! Bookmark not defined.
Bookmark not defined.
3.4.2. Rangkaian Sensor Ultrasonik PING... Error! Bookmark not defined. 3.4.3. Rangkaian Liquid Crystal Display (LCD) Error! Bookmark not defined. 3.4.4. Rangkaian Driver Motor (L293D) ... Error! Bookmark not defined. 3.4.5. Rangkaian Motor Servo ... Error! Bookmark not defined. 3.5. Gambaran Sistem ... Error! Bookmark not defined. 3.6. Kontrol Logika Fuzzy ... Error! Bookmark not defined. 3.7. Perancangan Perangkat Lunak ... Error! Bookmark not defined. BAB IV PENGUJIAN DAN ANALISIS ... Error! Bookmark not defined. 4.1. Pengujian dan Analisis Bagian Masukan (Input) ... Error! Bookmark not defined.
4.1.1. Pengujian Sensor Jarak ... Error! Bookmark not defined. 4.1.2. Pengujian Pulse Width Modulation (PWM) ... Error! Bookmark not defined.
4.2. Pengujian Dan Analisis Bagian Proses... Error! Bookmark not defined. 4.3. Pengujian Dan Analisis Bagian Keluaran (Output). Error! Bookmark not defined.
4.3.1. Pengujian Tampilan LCD ... Error! Bookmark not defined. 4.3.2. Pengujian Motor Servo ... Error! Bookmark not defined. 4.4. Analisis Kinerja Perangkat Secara Keseluruhan ... Error! Bookmark not defined.
4.5. Analisis Keluaran Rem Pada Kontrol Logika Fuzzy .. Error! Bookmark not defined.
Gambar 2.1 Kurva Linear Naik ... Error! Bookmark not defined. Gambar 2.2 Kurva Linear Turun ... Error! Bookmark not defined. Gambar 2.3 Kurva Segitiga ... Error! Bookmark not defined. Gambar 2.4 Kurva Trapesium ... Error! Bookmark not defined. Gambar 2.5 Fuzzy Inference System (Mamdani) ... Error! Bookmark not defined. Gambar 2.6 Fuzzy Inference System (Sugeno) ... Error! Bookmark not defined. Gambar 2.7 Struktur Kontrol Fuzzy... Error! Bookmark not defined. Gambar 2.8 Perancangan Pengereman Mobil ... Error! Bookmark not defined. Gambar 2.9 Blok Diagram Chip Mikrokontroler ... Error! Bookmark not defined. Gambar 2.10 Konfigurasi Pin ATmega16 ... Error! Bookmark not defined. Gambar 2.11 Prinsip Kerja ULTRASONIK PING ... Error! Bookmark not defined. Gambar 2.12 Sensor ULTRASONIK PING ... Error! Bookmark not defined. Gambar 2.13 Bentuk Fisik Motor DC ... Error! Bookmark not defined. Gambar 2.14 Pengaturan Arah Putaran pada Motor DC... Error! Bookmark not defined.
Gambar 2.17 16x2 Character LCD Module ... Error! Bookmark not defined. Gambar 2.18 Buzzer ... Error! Bookmark not defined. Gambar 2.19 Motor Servo... Error! Bookmark not defined. Gambar 3.1 Blok Diagram Sistem Pengereman Mobil Otomatis .... Error! Bookmark not defined.
Gambar 3.5 Rangkaian Ultrasonik ... Error! Bookmark not defined. Gambar 3.6 Rangkaian Liquid Crystal Display (LCD) ... Error! Bookmark not defined.
Gambar 3.7 Rangkaian Driver Motor Menggunakan L298 ... Error! Bookmark not defined.
Gambar 3.8 Rangkain Motor Servo ... Error! Bookmark not defined. Gambar 3.9 Proses Pengereman Otomatis ... Error! Bookmark not defined. Gambar 3.10 Flow Chart Sistem Pengereman Otomatis Berbasis Mikrokontroler Atmega16 Menggunakan Logika Fuzzy ... Error! Bookmark not defined. Gambar 4.1 Penempatan Sensor Ultrasonik pada Prototype ... Error! Bookmark not defined.
Gambar 4.2 Grafik Pengukuran Jarak Menggunakan Sensor Ultrasonik Pada Bidang Datar ... Error! Bookmark not defined. Gambar 4.3 Tampilan LCD menggunakan Sensor Ultrasonik .. Error! Bookmark not defined.
Gambar 4.4 Tampilan Listing Program Fuzzyfikasi Kecepatan Error! Bookmark not defined.
Gambar 4.5 Tampilan Listing Program Fuzzyfikasi Jarak ... Error! Bookmark not defined.
Gambar 4.6 Tampilan Listing Program Fungsi Keanggotan Rem ... Error! Bookmark not defined.
Gambar 4.8 Hasil Perhitungan Kontrol Logika Fuzzy Dengan Matlab ... Error! Bookmark not defined.
Gambar 4.9 Hasil Percobaan Rem Sedang Pada Prototype ... Error! Bookmark not defined.
Gambar 4.10 Hasil Perhitungan Kontrol Logika Fuzzy Dengan Matlab ... Error! Bookmark not defined.
Gambar 4.11 Hasil Percobaan Rem Sedang Pada Prototype ... Error! Bookmark not defined.
Gambar 4.12 Hasil Perhitungan Kontrol Logika Fuzzy Dengan Matlab ... Error! Bookmark not defined.
Gambar 4.13 Fungsi Keanggotaan Jarak ... Error! Bookmark not defined. Gambar 4.14 Fungsi Keanggotaan Kecepatan ... Error! Bookmark not defined. Gambar 4.15 Fungsi Keanggotaan Rem ... Error! Bookmark not defined. Gambar 4.16 Hasil Percobaan Pada Prototype ... Error! Bookmark not defined. Gambar 4.17 Hasil Perhitungan Kontrol Logika Fuzzy Dengan Matlab ... Error! Bookmark not defined.
Gambar 4.18 Hasil Percobaan Pada Prototype ... Error! Bookmark not defined. Gambar 4.19 Hasil Perhitungan Kontrol Logika Fuzzy Dengan Matlab ... Error! Bookmark not defined.
Gambar 4.20 Hasil Percobaan Pada Prototype ... Error! Bookmark not defined. Gambar 4.21 Hasil Perhitungan Kontrol Logika Fuzzy Dengan Matlab ... Error! Bookmark not defined.
defined.
Gambar 4.26 Skenario 3 ... Error! Bookmark not defined. Gambar 4.27 Hasil Simulasi Skenario 2 Pada Prototype ... Error! Bookmark not defined.
DAFTAR TABEL
Tabel 2.1 Fungsi Pin ATmega16 ... Error! Bookmark not defined. Tabel 3.1 Uraian Perbandingan Jenis Mikrokontroler Error! Bookmark not defined. Tabel 3.2. Uraian Perbandingan Jenis Sensor Jarak ... Error! Bookmark not defined. Tabel 3.3 Uraian Perbandingan Jenis Liquid Crystal Display (LCD) ... Error! Bookmark not defined.
Tabel 3.4 Uraian Perbandingan Jenis IC Driver Motor ... Error! Bookmark not defined.
defined.
Tabel 3.8 Aturan Fuzzy Pada Pengereman Mobil ... Error! Bookmark not defined. Tabel 4.1 Tabel Hasil Pengukuran Jarak Menggunakan Sensor Ultrasonik Pada
Bidang Datar ... Error! Bookmark not defined. Tabel 4.2 Tabel Hasil Pengukuran Kecepatan Menggunakan Sensor Optocupler
C N V Abhinandan Read et al.2013. Fuzzy Logic Inference System to Control Speed and Direction of a Vehicle,Int.J.Computer Tecnology & Application. Vol4.
M.B Marhatine.2007. Automated Car Braking System Using Fuzzy Logic Controller, Pahang Malaysia University.
A. Muhammad.2013. Kendali Cerdas, Logika Fuzzy, Indonesia Computer University.
X. Geraldo, Fuzzy Logic, Computing Science Department and Systems and Computing, Federal University of Rio de Janeiro
Nama Lengkap : Okta Rusdiansyah Ramlan Tempat, tanggal lahir : Bandung, 06 Oktober1991 Jenis Kelamin : Laki-laki
Kewarganegaraan : Indonesia
Agama : Islam
Status : Belum Menikah
Alamat : Jl.Elang I No 16, Bandung
Telepon : 085624282138
Pendidikan Formal : Tahun 1997 – 2003 SDN YWKA IV Tahun 2003 – 2006 SMPN 1 Bandung Tahun 2006 – 2009 SMAN 20 Bandung Tahun 2009 – 2014 UNIKOM Bandung
Demikian daftar riwayat hidup ini saya buat dengan sebenar-benarnya
Bandung, 04 Maret 2014
1 1.1. Latar Belakang
Seiring dengan pesatnya kemajuan pada bidang ilmu tekhnologi, banyak inovasi dalam pembuatan alat baru yang diciptakan agar dapat memudahkan pekerjaan seseorang. Dimana dalam era modernisasi saat ini, teknologi menjadi bagian penting dalam kehidupan sehari-hari.
Tingginya angka kecelakaan lalu lintas saat ini menjadi salah satu faktor kesalahan bagi pengemudi dalam berkendara (human error). Untuk menghindari hal itu, kedisiplinan dan konsentrasi pada saat berkendara sangat dibutuhkan. Namun, kualitas sistem keamanan kendaraan juga sangat mempengaruhi keselamatan pengemudi. Dengan perkembangan ilmu pengetahuan dan teknologi yang telah ada memungkinkan manusia untuk membuat sistem keamanan pada kendaraan.
1.2. Identifikasi Masalah
Berdasarkan latar belakang yang telah dikemukakan, maka dapat diidentifikasi permasalahan dalam tugas akhir ini yaitu, dibutuhkan suatu sistem yang dapat memperlambat/menghentikan mobil secara otomatis untuk menghindari kecelakan kepada pengemudi pada saat ada obyek didepannya.
1.3. Rumusan Masalah
Berdasarkan permasalahan yang terindentifikasi diatas, maka didapat rumusan masalah pada tugas akhir ini yaitu, bagaimana cara agar dapat membuat suatu sistem yang dapat melakukan pengereman secara otomatis pada kendaraan.
1.4. Tujuan
Tujuan yang akan dicapai dari pembuatan tugas akhir ini untuk mengembangkan suatu sistem yang dapat dimanfaatkan untuk pengereman mobil secara otomatis.
1.5. Batasan Masalah
Batasan masalah dalam penulisan tugas akhir ini adalah sebagai berikut.
Sistem pengereman kendaraan secara otomatis.
Sensor yang digunakan adalah sensor ultrasonik.
Menggunakan metode logika fuzzy.
1.6. Metode Penelitian
Metoda penelitian yang dilakukan adalah eksperimental dengan tahapan sebagai berikut.
1. Observasi dan studi literature
Jenis metode pengambilan data dengan cara mengumpulkan data-data serta informasi melalui buku dan internet, mendatangi dan melakukan tanya jawab dengan para ahli metode fuzzy dan para ahli yang mengerti soal proses pengereman pada mobil, mengindentifikasi sensor dan mikrokontroler yang digunakan.
2. Perancangan dan Pembuatan Alat
Meliputi hal yang berkaitan dengan perangkat keras dan perakat lunak.
Perangkat lunak : Pemrograman ATmega16, pemrograman sensor jarak,
pemrograman metode fuzzy.
Perangkat keras : Perancangan alat dan pembuatan alat hingga pengemasan.
3. Pengujian Alat
Setelah alat dibuat maka akan dilakukan pengujian untuk mengetahui kinerja dari alat tersebut dan apakah terjadi kesalahan atau tidak.
4. Evaluasi
1.7. Sistematika Penulisan
Sistematika penulisan tugas akhir ini adalah sebagai berikut .
Bab I Pendahuluan
Berisi mengenai gambaran umum dari penelitian yang berisi latar belakang dari pemasalahan yang akan dijalankan topik, tujuan penelitian, batasan masalah, metode penelitian, serta sistematika penulisan.
Bab II Landasan Teori
Berisi mengenai dasar teori alat yang digunakan sebagai dasar dalam pengolahan data.
Bab III Pemilihan Komponen dan Perancangan Alat
Berisi mengenai alasan atau latar belakang dalam pemilihan komponen untuk perancangan perangkat keras (hardware) dan perangkat lunak (software) yang akan dibuat.
Bab V Pengujian dan Analisa Hasil Uji Coba
Menganalisa alat yang sudah dirancang, pengoperasian alat dan cara kerja alat beserta pemrograman, diagram alir dan tabel hasil uji.
Bab VI Penutup
5
Bab ini berisi tentang teori mengenai permasalahan yang dibahas dalam tugas akhir ini secara garis besar dimulai dari definisi logika fuzzy, mikrokontroler ATMega-16, sensor ultrasonik ping, motor DC, drivermotor, Liquid Crystal Display (LCD), buzzer, motor servo sampai dengan perangkat
lunak (software) Bahasa C sebagai pemrogram.
2.1. Logika Fuzzy
Teori himpunan logika fuzzy dikembangkan oleh Prof. Lofti Zadeh pada tahun 1965. Ia berpendapat bahwa logika benar dan salah dari logika Boolean tidak dapat mengatasi masalah gradasi yang berada pada dunia nyata. Untuk mengatasi masalah gradasi yang tidak terhingga tersebut, Zadeh mengembangkan sebuah himpunan fuzzy.
2.1.1. Alasan Penggunaan Logika Fuzzy
Adapun beberapa alasan dalam penggunaan logika fuzzy pada perancangan ini adalah:
1. logika fuzzy memiliki toleransi terhadap data-data yang tidak tepat,
2. logika fuzzy mampu memodelkan fungsi-fungsi non-linier yang sangat kompleks,
3. logika fuzzy dapat bekerja sama dengan teknik-teknik kendali cerdas secara konvensional,
4. pemakaian fungsi keanggotaan memungkinkan fuzzy untuk melakukan observasi obyektif terhadap nilai-nilai yang subyektif. Selanjutnya fungsi keanggotaan ini dapat dikombinasikan untuk membuat pengungkapan konsep yang lebih jelas,
5. beroperasi tanpa campur manusia manusia secara langsung, tetapi memiliki efektivitas yang sama dengan pengendali manusia.
2.1.2. Himpunan Fuzzy
Pada himpunan tegas (crisp), nilai keanggotaaan suatu item x dalam suatu himpunan A, yang sering ditulis dengan μA [x], memiliki dua kemungkinan, yaitu:
satu (1), yang berarti bahwa suatu item menjadi anggota dalam suatu
himpunan, atau
nol (0), yang berarti bahwa suatu item tidak menjadi anggota dalam suatu
Pada penggunaan himpunan crisp, adanya perubahan kecil saja pada suatu nilai mengakibatkan perbedaan kategori yang cukup signifikan. Himpunan fuzzy digunakan untuk mengantisispasi hal tersebut. Seberapa besar ekstensinya dalam himpunan tersebut dapat dilihat pada nilai keanggotaannya. Kalau pada himpunan crisp, nilai keanggotaan hanya ada dua kemungkinan, yaitu 0 atau 1, pada himpunan fuzzy nilai keanggotaan terletak pada rentang 0 sampai 1. apabila nilai keanggotaan fuzzy μ A[x] = 0 berarti x tidak menjadi anggota himpunan A, demikian pula apabila x memiliki nilai keanggotaan μA[x] = 1 berarti x menjadi
anggota penuh himpunan A. Himpunan fuzzy memiliki dua atribut, yaitu :
1. linguistik, yaitu penamaan suatu grup yang mewakili suatu keadaan atau kondisi tertentu dengan menggunakan bahasa alami, seperti : MUDA, PAROBAYA, TUA.
2. numeris, yaitu suatu nilai (angka) yang menunjukkan ukuran dari suatu variabel seperti 40, 25, 30.
Ada beberapa hal yang perlu diketahui dalam memahami sistem fuzzy, yaitu. 1. Variabel fuzzy
Variabel fuzzy merupakan variabel yang hendak dibahas dalam suatu sistem fuzzy. Contoh: umur, temperatur, permintaan.
2. Himpunan fuzzy
3. Semesta pembicaraan
Semesta pembicaraan adalah keseluruhan nilai yang diperbolehkan untuk dioperasikan dalam suatu variabel fuzzy. Contoh: Semesta pembicaraan untuk variabel umur: [0 + ~].
4. Domain
Domain himpunan fuzzy adalah keseluruhan nilai yang diijinkan dalam semesta pembicaraan dan boleh dioperasikan dalam suatu himpunan fuzzy. Contoh: MUDA = [0, 45] ,TUA = [45, + ~].
2.1.3. Fungsi Keanggotaan
Fungsi keanggotaan (membership function) adalah suatu kurva yang menunjukkan pemetaan titik-titik input data ke dalam nilai keanggotaannya (derajat keanggotaan). Ada beberapa fungsi yang digunakan pada perancangan ini, antara lain.
1. Representasi Linier
Pada pemetaan linear, pemetaan input ke derajat keanggotaannya
digambarkan sebagai suatu garis lurus. Ada dua keadaaan himpunan fuzzy yang
linear. Pertama, kenaikan himpunan dimulai pada nilai domain yang memiliki derajat
keanggotaan nol [0] bergerak ke kanan menuju ke nilai domain yang memiliki derajat
keanggotaan lebih tinggi. Gambar 2.1 dibawah ini menunjukan grafik dari kurva
Gambar 2.1 Kurva Linear Naik
Fungsi Keanggotaan :
�[�] = {
; � �
�−
− ; � �
; �
………….………...pers.1)
Kedua, merupakan kebalikan yang pertama. Garis lurus dimulai dari nilai domain dengan derajat keanggotaan tertinggi pada sisi kiri, kemudian bergerak menurun ke nilai domain yang memiliki derajat keanggotaan lebih rendah. Gambar 2.2 dibawah ini menunjukan grafik dari kurva linier turun.
Gambar 2.2 Kurva Linear Turun
Fungsi keanggotaan :
�[�] = {
; �
−�
− ; � �
; � �
2. Representasi Kurva Segitiga
Kurva segitiga pada dasarnya merupakan gabungan antara dua garis linear. Gambar 2.3 dibawah ini menunjukan grafik dari kurva segitiga.
Gambar 2.3 Kurva Segitiga
Fungsi Keanggotaan :
�[�] =
{
; � �
�−
− ; � �
−�
− ; �
; �
………..(pers.3)
Untuk menentukan nilai minimum dan maximum fungsi keanggotaan pada representasi kurva segitiga, dapat menggunakan persamaan dibawah ini.
�[�] = �� � �− − , −�− , ...(pers.4)
3. Representasi Kurva Trapesium
Kurva trapesium pada dasarnya seperti bentuk segitiga, hanya saja ada beberapa titik yang memiliki nilai keanggotaan satu. Gambar 2.4 dibawah ini menunjukan grafik dari kurva trapesium.
Gambar 2.4 Kurva Trapesium
Fungsi Keanggotaan :
�[�] =
{
; � �
�−
− ; � �
; �
−�
− ; �
; �
………..……...…(pers. 5)
Untuk menentukan nilai minimum dan maximum fungsi keanggotaan pada representasi kurva trapesium, dapat menggunakan persamaan dibawah ini.
�[�] = �� � �−− , , −�− , ...(pers.6)
2.1.4. Operator Dasar Fuzzy
Ada beberapa operasi yang didefinisikan secara khusus untuk mengkombinasi dan memodifikasi himpunan fuzzy. Nilai keanggotaan sebagai hasil dari 2 operasi disebut α-predikat. Ada tiga operator dasar yaitu.
1. Operator AND
Operator ini berhubungan dengan operasi interseksi pada himpunan. A predikat sebagai hasil operasi dengan operator AND diperoleh dengan mengambil nilai keanggotaan terkecil antara elemen pada himpunan-himpunan yang bersangkutan.
µAnB = Min (µA [x],µB [y]………(pers. 7) 2. Operator OR
Operator ini berhubungan dengan operasi union pada himpunan. α -
predikat sebagai hasil operasi dengan operator OR diperoleh dengan mengambil nilai keanggotaan terbesar antara elemen pada himpunan-himpunan yang bersangkutan.
µAuB = Max (µA [x],µB [y]) …………..…………(pers. 8) 3. Operator NOT
Operator ini berhubungan dengan operasi komplemen himpunan. α –
predikat sebagai hasil operasi dengan operator NOT diperoleh dengan mengurangkan nilai keanggotaan elemen pada himpunan dengan 1.
2.1.5. Fuzzy Inference System
Salah satu metode untuk penalaran (Fuzzy Inference System) adalah Metode Mamdani (Max-Min). Metode ini diperkenalkan oleh Ebrahim Mamdani pada tahun
1975. Untuk mendapatkan output, diperlukan empat tahap. Dapat digambarkan
dengan block dibawah ini.
1. Pembentukan himpunan Fuzzy
Pada Metode Mamdani, baik variabel input maupun variabel output dibagi menjadi satu atau lebih himpunan fuzzy.
2. Fuzzyfikasi (Fuzzification)
Proses memetakan nilai tegas input (crisp) kedalam himpunan Fuzzy. Hasil dari proses ini berupa fuzzy input.
3. Rule evaluasi (Rule evaluation)
Proses melakukan penalaran terhadap fuzzy input yang dihasilkan oleh proses fuzzification berdasarkan aturan fuzzy yang telah dibuat. Proses ini menghasilkan fuzzy output. Fungsi Implikasi yang digunakan adalah Min. 4. Penegasan (Defuzzification)
Z
COA =
∫ zμA z z dz∫ zμA z z dz……..………(pers.10)
Gambar 2.5 Fuzzy Inference System (Mamdani)
Salah satu alternatif metode untuk penalaran (Fuzzy Inference System) adalah dengan menggunakan metode penalaran fuzzy metode Sugeno hampir sama dengan penalaran Mamdani, hanya saja output sistem tidak berupa himpunan fuzzy, melainkan berupa konstanta atau persamaan linier. Metode ini diperkenalkan oleh Takagi-Sugeno Kang pada tahun 1985.
Pada metode Sugeno, fuzzifikasi, operasi fuzzy, dan implikasi sama seperti metode Mamdani, perbedaannya hanya pada agregasi dan defuzzifikasi. Jika pada metode Mamdani agregasi berupa daerah di bawah kurva, maka pada metode Sugeno agregasi berupa singleton. Defuzifikasi pada metode sugeno lebih sederhana, karena hanya menghitung titik rata-rata.
Gambar 2.6 Fuzzy Inference System (Sugeno)
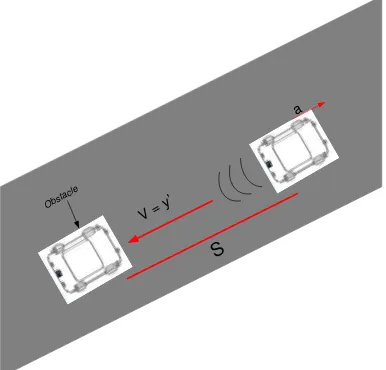
2.2. Pengereman Berbasis Kontrol Logika Fuzzy
Sebuah kontrol logika fuzzy untuk pengereman mempunyai dua variabel masukan s, v dan satu variabel keluaran a. Struktur kontrol logika fuzzy
ditunjukkan pada Gambar 2.7. Aturan fuzzy dasar terdiri dari beberapa aturan dengan sebelumnya dan model inferensi fuzzy mamdani digunakan untuk menentukan nilai output, sedangkan defuzzifikasi dilakukan dengan hasil percepatan. Gambar 2.7 menunjukkan fungsi keanggotaan fuzzy yang dipakai.
2.3. Permasalahan Dalam Pengereman Otomatis
Pada perancangan ini pengereman mobil ditentukan oleh 2 variabel s, v. Dimana variabel s merupakan jarak pada rintangan (obstacle), dan untuk v merupakan sebagai kecepatan dimana mobil akan melaju. Sedangkan output dari perancangan ini yaitu a, percepatan digunakan untuk mengontrol pengereman mobil tersebut agar bisa mencapai pengereman yang ditentukan secara otomatis.
Mobil akan melakukan pengereman dan penurunkan kecepatan dari peraturan (rules) dan fungsi keanggotaan yang telah ditentukan. Sehingga akan menghasilkan kontrol pengereman mobil dengan rintangan (obstacle) depan mobil secara otomatis, agar mobil bisa mencapai pengereman yang telah ditentukan.
Gambar 2.8 Perancangan Pengereman Mobil
2.4. Mikrokontroler AVR ATmega16
CPU RAM ROM
Gambar 2.9 Blok Diagram Chip Mikrokontroler
Pada gambar diatas ditunjukkan blok diagram dari mikrokontroler yang khas, yang merupakan sebuah sistem komputer dalam bentuk chip tunggal. Desain tersebut menggabungkan semua fitur yang diperoleh dari sebuah sistem komputer yaitu central processing unit (CPU) dan fitur-fitur lain yang dibutuhkan untuk membuat sebuah komputer yang lengkap yaitu: ROM, RAM, I/O Port, Serial I/O, Timer dan Clock Circuit.
Seperti halnya mikroprosesor, mikrokontroler juga adalah general purpose device, tetapi hanya difungsikan untuk membaca data dan melakukan kalkulasi
terbatas pada data serta mengendalikan lingkungannya berdasarkan kalkulasi tersebut. Penggunaan utama mikrokontroler adalah untuk mengontrol operasi sebuah mesin yang menggunakan program yang tetap yang disimpan di dalam ROM dan tidak akan berubah sepanjang umur sistem tersebut.
Jenis mikrokontroler yang digunakan dalam perancangan ini ialah tipe ATmega16. Pemilihan mikrokontroler ini didasarkan pada kebutuhan penggunaan. Di dalam sebuah chip mikrokontroler ATmega16 terdapat fitur utama diantaranya sebagai berikut.
1K Byte Internal SRAM
512 bytes EEPROM
Port I/O 32 bit, yang dikelompokkan dalam PortA, PortB, PortC dan
PortD.
8 bit timer/counter.
16 bit timer/counter.
Terdapat fasilitas JTAG.
4 channel PWM.
8-channel, 10-bit ADC.
On-Chip Analog Comparator.
Programmable Serial USART.
Real Time Counter with Separate Oscillator.
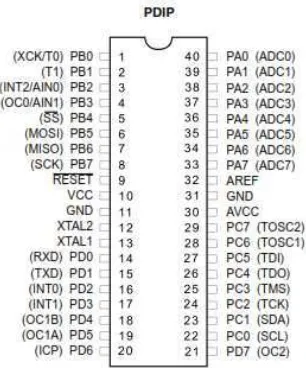
Konfigurasi pin mikrokontroler AVR ATmega16 untuk 40 pin DIP (dual
line package) ditunjukkan pada Gambar 2.10 berikut.
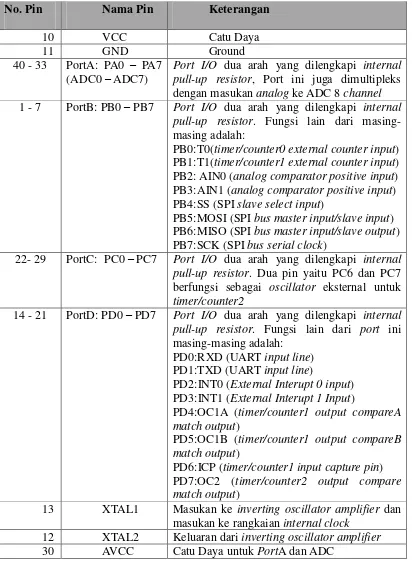
ATmega16 memiliki 40 Pin, yang masing-masing pin nya memiliki fungsi yang berbeda-beda baik sebagai port maupun fungsi yang lainnya. Berikut ini akan dijelaskan fungsi dari masing-masing kaki ATmega16.
Tabel 2.1 Fungsi Pin ATmega16
No. Pin Nama Pin Keterangan pull-up resistor, Port ini juga dimultipleks dengan masukan analog ke ADC 8 channel 1 - 7 PortB: PB0 – PB7 Port I/O dua arah yang dilengkapi internal
pull-up resistor. Fungsi lain dari masing-masing adalah:
PB0:T0(timer/counter0 external counter input) PB1:T1(timer/counter1 external counter input) PB2: AIN0 (analog comparator positive input) PB3:AIN1 (analog comparator positive input) PB4:SS (SPI slave select input)
PB5:MOSI (SPI bus master input/slave input) PB6:MISO (SPI bus master input/slave output) PB7:SCK (SPI bus serial clock)
22- 29 PortC: PC0 – PC7 Port I/O dua arah yang dilengkapi internal pull-up resistor. Dua pin yaitu PC6 dan PC7 berfungsi sebagai oscillator eksternal untuk timer/counter2
PD2:INT0 (External Interupt 0 input) PD3:INT1 (External Interupt 1 Input)
PD4:OC1A (timer/counter1 output compareA match output)
PD5:OC1B (timer/counter1 output compareB match output)
PD6:ICP (timer/counter1 input capture pin) PD7:OC2 (timer/counter2 output compare match output)
13 XTAL1 Masukan ke inverting oscillator amplifier dan masukan ke rangkaian internal clock
31 AGND Analog Ground
32 AREF Referensi masukan analog untuk ADC
2.5. Sensor Ultrasonik PING
Gelombang ultrasonik adalah gelombang yang memiliki frekuensi diatas 20 KHz dan diluar jangkauan pendengaran manusia. Sensor ultrasonik bekerja berdasarkan prinsip pantulan gelombang suara, dimana sensor ini menghasilkan gelombang suara yang kemudian menangkapnya kembali dengan perbedaan waktu sebagai dasar penginderaannya. Perbedaaan waktu antara gelombang suara yang dipancarkan dengan ditangkapnya kembali gelombang suara tersebut merupakan representasi jarak. Kecepatan rambat gelombang ultrasonik dipengaruhi oleh beberapa faktor antara lain adalah suhu, tekanan, kelembaban, dan sinyal radio.
Hal yang harus diperhatikan ketika menggunakan sensor ultrasonik terhadap suatu objek yaitu sebagai berikut.
a. Bentuk dan Ukuran Objek
b. Jenis Material
Objek padat yang terbuat dari besi atau baja akan memberikan pantulan yang lebih baik dibandingkan dengan objek yang terbuat dari kayu atau gabus.
c. Pola Permukaan
Objek dengan permukaan datar, halus, dan tegak lurus terhadap sinyal ultrasonik yang dipancarkan akan memberikan pantulan yang lebih kuat dibandingkan dengan permukaan tidak rata.
Gambar 2.11 Prinsip Kerja ULTRASONIK PING
2.6. Pulse Width Mudulation (PWM)
PWM merupakan suatu teknik teknik dalam mengatur kerja suatu peralatan yang memerlukan arus pull in yang besar dan untuk menghindari disipasi daya yang berlebihan dari peralatan yang akan dikontrol. PWM merupakan suatu metoda untuk mengatur kecepatan perputaran motor dengan cara mengatur prosentase lebar pulsa high terhadap perioda dari suatu sinyal persegi dalam bentuk tegangan periodik yang diberikan ke motor sebagai sumber daya. Semakin besar perbandingan lama sinyal high dengan perioda sinyal maka semakin cepat motor berputar.
Sinyal PWM dapat dibangun dengan banyak cara, dapat menggunakan metode analog menggunakan rankaian op-amp atau dengan menggunakan metode digital. Dengan metode analog setiap perubahan PWM-nya sangat halus, sedangkan menggunakan metode digital setiap perubahan PWM dipengaruhi oleh resolusi dari PWM itu sendiri. Misalkan PWM digital 8 bit berarti PWM tersebut memiliki resolusi 2 pangkat 8 = 256, maksudnya nilai keluaran PWM ini memiliki 256 variasi, variasinya mulai dari 0 – 255 yang mewakili duty cycle 0 – 100% dari keluaran PWM tersebut. Pada perancangan driver ini, sinyal PWM akan diatur secara digital yang dibangkitkan oleh mikrokontroler.
2.7. Motor Penggerak Roda
menggunakan motor DC sebagai komponen penggeraknya, karena jenis motor ini lebih mudah untuk dikendalikan. Kecepatan yang dihasilkan oleh motor DC berbanding lurus dengan potensial yang diberikan.
Gambar 2.13 Bentuk Fisik Motor DC
2.7.1. Ilustrasi Sederhana Untuk Menguji Motor DC
Pengaturan arah putaran pada motor DC dilakukan dengan mengubah arah polaritas yang mengalir melalui motor. Secara sederhana dapat dilihat pada Gambar 2.15 di bawah ini bahwa hal tersebut dapat dilakukan dengan cara mengubah polaritas tegangan pada motor DC.
+ - - +
+ - +
-(a) (b)
Berputar searah jarum jam
Berputar berlawanan arah jarum jam
Gambar 2.14 Pengaturan Arah Putaran pada Motor DC
pada gambar (b) dijelaskan bahwa perputaran motor DC dikatakan berlawanan arah jarum jam jika diberikan tegangan sumber dengan polaritas terbalik, maka arah putaran motor akan mengarah ke (kiri).
Kecepatan pada motor DC dapat diatur dengan beberapa cara, yaitu dengan mengatur fluks medan dan dengan mengaut tegangan sumber. Cara lain yang sering digunakan yaitu dengan melakukan pengaturan tegangan sumber dengan menggunakan metode PWM (Pulse Width Modulation). Sebenarnya motor DC tidak dapat dikendalikan secara langsung oleh mikrokontroler, karena
kebutuhan arus listrik yang besar pada motor DC sedangkan arus keluaran pada mikro sangat kecil.
Drivermotor merupakan pilihan alternatif yang dapat digunakan karena
dengan adanya drivermotor ini dapat membantu untuk mengontrol/ mengendalikan motor DC pada prototype sistem otomatis pengaturan rem pada mobil. Ada beberapa jenis drivermotor DC yang sering digunakan diantaranya, yaitu menggunakan rangkaian H-bridge transistor, H-bridge MOSFET dan IC drivermotor DC. Drivermotor yang mudah digunakan yaitu menggunakan IC
drivermotor DC seperti jenis L293D dan L298N.
2.8. DriverMotor L293D
yang menuju ke motor DC dihubungkan dengan pin outputan. Di bawah ini terdapat gambar IC drivermotor DC dan konfigurasi pin nya.
Gambar 2.15 Bentuk Fisik IC DriverMotor L298D
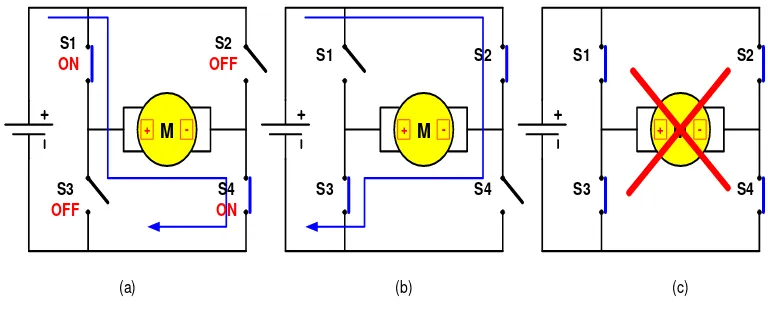
Secara konsep rangkaian H-bridge ini dapat diilustrasikan sebagai 4 saklar yang tersusun sedemikian rupa sehingga memungkinkan motor dapat teraliri arus dengan arah yang berkebalikan. Cara kerja dari rangkaian H-bridge terdapat pada Gambar 2.17 berikut ini:
M M M
Gambar 2.16 Cara Kerja H-bridge Dari gambar diatas, berikut H-bridge bekerja:
b) Ketika S2 dan S3 tertutup (diagonal) dan S1 dan S4 terbuka, maka arus akan mengalir sebaliknya yaitu mengalir dari baterai kenuju ke kutub negatif motor kemudian keluar ke kutup positif motor, maka motor akan berputar ke arah kiri.
c) Jika semua saklar tertutup, maka motor akan berhenti, dan jika diteruskan maka akan menyebabkan “short circuit”.
2.9. LiquidCrystalDisplay (LCD)
Liquid Crystal Display (LCD) merupakan display dot matriks yang
difungsikan untuk menampilkan tulisan berupa angka atau huruf sesuai dengan yang diinginkan, angka atau huruf yang ditampilkan sesuai dengan program yang digunakan untuk mengontrolnya. LCD Character memiliki banyak jenis dilihat dari jumlah bit-nya. LCD dot matriks dengan karakter 16x2 dan memiliki jumlah pin sebanyak 16 pin. Dalam tugas akhir ini LCD Character digunakan untuk menampilkan jarak antara mobil dengan obstacle di depannya dan sebagai indikator kecepatan, dalam arti lain LCD berfungsi mengantikan peran speedometer pada prototype mobil .
2.10. Buzzer
Buzzer adalah sebuah komponen elektronika yang berfungsi untuk
mengubah getaran listrik menjadi getaran suara. Pada dasarnya prinsip kerja buzzer hampir sama dengan loud speaker, jadi buzzer juga terdiri dari kumparan
yang terpasang pada diafragma dan kemudian kumparan tersebut dialiri arus sehingga menjadi elektromagnet, kumparan tadi akan tertarik ke dalam atau keluar, tergantung dari arah arus dan polaritas magnetnya, karena kumparan dipasang pada diafragma maka setiap gerakan kumparan akan menggerakkan diafragma secara bolak-balik sehingga membuat udara bergetar yang akan menghasilkan suara. Buzzer biasa digunakan sebagai indikator bahwa proses telah selesai atau terjadi suatu kesalahan pada sebuah alat (alarm). Dalam tugas akhir ini buzzer digunakan sebagai indikator ketika mobil telah mencapai jarak maksimum dengan obstacle didepannya .
Gambar 2.18 Buzzer
2.11. MotorServo
menentukan batas sudut dari putaran servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor.
Gambar 2.19 Motor Servo
2.12. Perangkat Lunak (Software)
Perangkat lunak yang digunakan dalam tugas akhir ini adalah program Bahasa C. Berikut adalah uraian dari masing-masing perangkat lunak tersebut.
2.12.1. Bahasa C
Pemrograman menggunakan Bahasa C adalah salah satu dari sekian banyak bahasa dasar untuk pemrograman mikrokontroler, misalnya bahasa Assembly, Basic, dan lain-lain. Bahasa pemrograman Bahasa C dikenal di seluruh
1. Preprocessor
Biasanya digunakan untuk menyertakan file header (.h) atau file library. File include berguna untuk memberitahu compiler agar membaca file yang di include- kan lebih dahulu agar mengenali definisi-definisi yang digunakan dalam
program sehingga tidak dianggap error. Cara penulisan:
#include <………….> untuk lokasi standar file yang telah disetting oleh tools
biasanya pada folder include atau forder directori complier.
#include”………….” Untuk lokasi file yang yang kita tentukan sendiri.
File header io.h adalah file yang segala informasi/definisi tentang register-register fungsi khusus (SFR) dan bit-bit atau pin-pin mikrokontroler AVR.
2. Komentar
Komentar merupakan bagian kode program yang tidak dieksekusi saat program dijalankan. Komentar diperlukan untuk memperjelas jalannya program agar lebih mudah dimengerti. Komentar dapat dimanfaatkan untuk penuangan ide yang belum sempat diimpelementasikan.
Contoh penulisan :
// hanya satu ini sebelu enter yang dianggap komentar.
\* kata-kata yang berbeda dalam tanda garis miring dengan bintang dianggap komentar berapa pun panjangnya dan berapa pun barisnya*/.
3. Nama
Nama digunakan untuk mengidentifikasi variabel, konstanta, tipe, fungsi dan prosedur. Penamaan memiliki aturan.
Dalam C, nama membedakan antara huruf besar dan huruf kecil.
Nama harus dimulai dengan alfabet, tidak boleh angka, spasi atau karakter
khusus.
Karakter penyusun nama hanya huruf alfabet, angka dan underscore.
Tidak boleh mengandung operator aritmatik, relasional, tanda baca dan
karakter khusus.
Setiap nama harus ditulis secara utuh, tidak boleh diberi spasi.
Contohnya penulisan : int x, y, jumlah; // x, y dan jumlah adalah nama dari variabel intnilai(const int angka, int test){} // nilai adalah nama dari fungsi.
4. Operator
Operator adalah karakter-karakter khusus untuk memanipulasi variable. Operand adalah variabel atau konstanta yang merupakan bagian dari pernyataan.
Aritmatika :
== adalah logika sama dengan.
!= adalah logika tidak sama dengan.
< adalah logika lebih kecil.
<= adalah logika lebih kecil sama dengan.
>= adalah logika lebih besar sama dengan.
! adalah logika not.
&& adalah logika AND.
|| adalah logika OR.
<< adalah shift left.
>> adalah shift right.
5. Kontrol Aliran Program
Untuk mencerdaskan sebuah program, maka diperlukan algoritma dimana terdiri dari berbagai pengendalian aliran program.
If (...){…}
Digunakan untuk mengecek satu kondisi satu blok jawaban.
If (…) {…} else {…}
Digunakan untuk mengecek satu kondisi dua blok jawaban.
If (…) {…} else if (…) {…}else {…}
Digunakan untuk mengecek beberapa kondisi yang berkaitan.
While (…) {…}
Digunakan untuk perulangan/looping/iterasi jika kondisi yang diuji bernilai benar.
Do {…} while (…)
terlebih dahulu baru diuji, hal ini dapat terjadi kemungkinan yang diuji salah namun blok tetap di eksekusi.
For (… ; … ; … ;…) {…}
33
Pemilihan jenis komponen dalam perancangan dan pembuatan suatu perangkat elektronik mutlak dilakukan karena berdampak langsung pada tingkat efisiensi dan efektifitas perangkat yang dibuat. Beberapa hal yang perlu diperhatikan diantaranya kualitas bahan, tingkat kecepatan dan keakuratan saat komponen bekerja, bentuk serta ukuran dimensi komponen, sampai pengeluaran dana yang digunakan. Sehingga pada perancangan dan pembuatan pembuatan pengereman mobil otomatis menggunakan metode fuzzy ini, pemilihan jenis komponen yang digunakan harus diperhatikan agar mendapatkan hasil kinerja yang baik dari perancangan ini.
Perancangan dan realisasi sistem merupakan bagian yang terpenting dari seluruh pembuatan tugas akhir ini. Perancangan yang baik dan dilakukan secara sistematik akan memberikan kemudahan dalam proses pembuatan alat serta mempermudah dalam proses analisis dari alat yang dibuat.
3.1. Latar Belakang Pemilihan Komponen
3.1.1. Pemilihan Jenis Mikrokontroler
Jenis mikrokontroler yang digunakan pada perangkat pengereman mobil otomatis ini adalah mikrokontroler jenis AVR seri ATMega 16. Uraian mengenai perbandingan jenis mikrokontroler AVR ATMega 16 bila dibandingkan dengan seri mikrokontroler yang sebelumnya dipakai pada perangkat pengereman mobil otomatis, dapat dilihat pada Tabel 3.1 di bawah ini.
Tabel 3.1 Uraian Perbandingan Jenis Mikrokontroler
Spesifikasi Jenis Mikrokontroler
AT89C51 ATMega 16 ATMega 8535
Flash 4 kb 16 kb 8 kb
RAM 128 byte 1kb SRAM 512 byte SRAM
I/O 32 32 32
PIN 40 40 40
Harga Rp. 15.000 Rp. 50.000 Rp. 55.000
Berdasarkan uraian Tabel 3.1 di atas, dapat ditarik kesimpulan bahwa jenis mikrokontroler AVR ATMega 16 cocok digunakan dalam perancangan pengeremean mobil otomatis dengan metode fuzzy, karena memiliki kapasitas memori serta RAM yang lebih cukup besar untuk mengisi program metode fuzzy sehingga mempengaruhi kecepatan akses data sementara pada mikrokontroler.
3.1.2. Pemilihan Jenis Sensor Jarak
Tabel 3.2. Uraian Perbandingan Jenis Sensor Jarak
Indikator Sensor Tidak ada Tidak ada Ada
Frekuensi Brust - 40kHz/100us 40kHz/200us
Harga Rp 220.000 Rp 295.000 Rp 345.000
Berdasarkan uraian Tabel3.2 di atas, dapat ditarik kesimpulan bahwa jenis sensor ultrasonik PING lebih cocok digunakan pada perancangan ini, karena memiliki jarak yang jauh di bandingakan sensor GP2YOA02YK, disamping itu ultrasonik PING memiliki kecepatan pantulan frekuensi yang baik di bandingkan sensor ultrasonik SRF04, dan sensor ultrasonik PING memiliki indikator yang berupa LED sehingga kinerja sensor dapat terlihat secara realtime.
3.1.3. Pemilihan Jenis LiquidCrystalDisplay (LCD) Character 16x2
Penggunaan Liquid Crystal Display (LCD) Character 16x2 pada perancangan pengereman mobil otomatis ini adalah sebagai indikator kecepatan dan penampilan jarak mobil dengan obstacle di depan. Jumlah karakter yang diperlukan kurang dari 16 karakter dan penampil karakter dilakukan menggunakan 2 baris, sehingga jenis LCD yang dipakai adalah 16x2. Pada Tabel di bawah ini, akan diuraikan alasan pemilihan Liquid Crystal Display (LCD) Character 16x2.
Tabel 3.3 Uraian Perbandingan Jenis Liquid Crystal Display (LCD)
Spesifikasi Jenis LCD
LCD 16x1 LCD 16x2 LCD 16x4
Karakter 16 32 64
Baris 1 2 4
3.1.4. Pemilihan Jenis IC Driver Motor
Jenis driver motor yang digunakan pada perancangan pengereman mobil otomatis ini yaitu menggunakan IC L293D. Karena IC L293D memiliki dua buah rangkaian H-Bridge didalamnya sehingga dapat digunakan untuk men-drive dua buah motor DC dan arus yang dihantarkan cukup kecil sehingga pemanfaatan arus bisa lebih optimal, selain itu harga IC L293D relatif lebih murah. Sehingga dapat digunakan untuk menggerakan putaran roda pada mobil bagian belakang. Berikut uraian perbandingan IC driver motor jenis L298 dengan L293D.
Tabel 3.4 Uraian Perbandingan Jenis IC Driver Motor Spesifikasi Jenis Driver Motor
IC L293D IC L298N
Arus Maksimal 1 A 4 A
Harga Rp 20.000 Rp 22.500
3.1.5. Pemilihan Jenis Buzzer
Jenis buzzer yang digunakan pada perancangan pengereman mobil otomatis ini yaitu menggunakan miniature buzzer. Karena miniature buzzer memiliki pin sehingga mudah di gunakan dalam pcb, buzzer di gunakan sebagai alarm ketika mobil dalam keadaan jarak darurat dengan obstacle di depannya.
Tabel 3.5 Uraian Perbandingan Jenis Buzzer
Spesifikasi Jenis Buzzer
MiniaturBuzzer StandartBuzzer
Dimensi, lebar/tinggi 13mm/7mm 22mm/19mm
Harga Rp 25.000 Rp 28.500
3.1.6. Pemilihan Jenis Motor (Pengatur Rem)
bobot yang ringan serta sudah memiliki gear agar tekanan yang diberikan pada rem bisa lebih maksimal dan dapat mengontrol pengereman dengan lebih mudah.
Tabel 3.6 Uraian Perbandingan Jenis Motor DC
Spesifikasi
Pada perancangan sistem pengereman mobil otomatis ini, secara umum terdapat tiga bagian utama yaitu bagian masukan (input), proses (process), dan keluaran (output). Tiga bagian inilah yang menjadi dasar dari kinerja sistem pengereman otomatis ini.
Gambar 3.1 Blok Diagram Sistem Pengereman Mobil Otomatis
Secara umum, cara kerja dari pengereman mobil otomatis yang akan dirancang dalam tugas akhir ini adalah ketika adanya masukan dari PWM dan sensor ultrasonik PING sensor mendeteksi adanya penghalang dengan jarak tertentu, maka secara otomatis mikrokontroler akan memproses inputan dari PWM dan sensor ultrasonik PING tersebut yang telah terintegrasi dengan
INPUT PROCESS OUTPUT
mikrokontroler untuk menentukan pengereman secara otomatis. Berikut ini uraian singkat fungsi dari masing-masing bagian utama blok diagram sistem pengereman otomatis berbasis mikrokontroler ATmega16 menggunakan logika fuzzy.
1. Masukan (Input)
Pada bagian masukan (input) terdapat perangkat yang berfungsi untuk memberikan masukan bagi mikrokontroler sesuai dengan fungsinya masing-masing, diantaranya :
pulse width modulation
teknik sampling PWM ini digunakan sebagai inputan kecepatan pada mobil prototype dengan nilai 0-100%.
sensor ultrasonik PING
sensor ini adalah jenis sensor jarak yang bekerja dengan cara memancarkan gelombang ultrasonik. Sensor ini berfungsi sebagai pendeteksi adanya mobil lain atau rintangan (obstacle) di depan mobil .
2. Pemroses (Process)
3. Keluaran (Output)
Bagian keluaran atau output adalah bagian yang merupakan hasil eksekusi perangkat dan bertindak sebagai hasil dari kinerja perangkat sesuai dengan keinginan perancang. Terdapat tiga jenis perangkat keluaran yang digunakan dalam perancangan pengereman otomatis pada tugas akhir ini, diantaranya :
motor DC (Penggerak Roda Mobil)
motor Dc bertindak sebagai aktuator/penggerak pada mobil, motor DC
dikontrol arah dan kecepatannya melalui IC L298 yang berguna sebagai driver motor dan pengaturannya dilakukan melalui eksekusi program pada mikrokontroler ATmega16.
LCD 16x2
LCD 16x2 bertindak sebagai indikator kecepatan dan jarak antara mobil dan rintangan di depannya (obstacle) dan pengaturan melalui eksekusi program pada mikro ATmega16.
buzzer
buzzer bertindak sebagai alarm pengingat ketika jarak mobil dengan rintangan di depannya sudah mencapai jarak minum dan secara otomatis akan melakukan pengereman.
motor servo (Pengereman Roda Mobil)
Motor servo bertindak sebagai pengontrolan rem untuk secara mekanis,
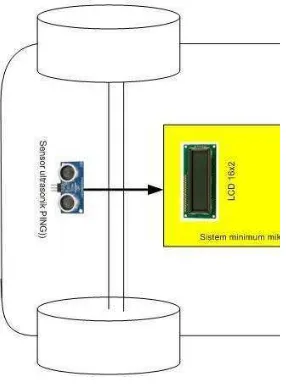
3.3. Perancangan Mekanik Pada Mobil
Dalam perancangan pengereman mobil otomatis pada tugas akhir ini, mobil yang akan dirancang memiliki satu buah sensor ultrasonik PING yaitu satu sensor dibagian depan pada mobil. Pada bagian depan atas mobil terdapat Sistem Minimum ATMega16,lcd dan buzzer. Pada bagian belakang atas mobil terdapat motorDC untuk mengendalikan motor. Pada bagian paling belakang mobil terdapat satu buah motor servo untuk pengereman.
Sistem minimum mikrocontroller ATMega16
Gambar 3.2 Perancangan Mekanik Pada Mobil
3.4. Perancangan Perangkat Keras (Hardware)
Pada perancangan perangkat keras (hardware) pengereman otomatis ini, dilakukan perancangan terhadap sistem kontrol elektronik yang meliputi pembuatan rangkaian-rangkaian elektronik yang saling terintegrasi membentuk suatu sistem kendali dengan tujuan mengendalikan sistem kerja dari pengereman mobil agar dapat bekerja secara otomatis.
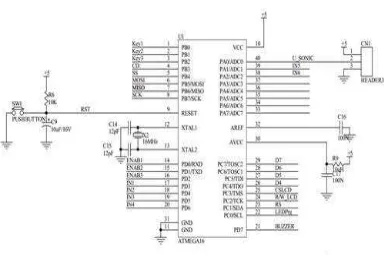
3.4.1. Rangkaian Sistem Minimum Mikrokontroler AVR ATmega16
Sistem minimum mikrokontroler ATmega16 adalah rangkaian yang dikhususkan untuk mengoperasikan IC (Integrated Circuit) mikrokontroler ATmega16. Mikrokontroler inilah yang nantinya digunakan sebagai pusat sistem kendali pada pengereman mobil otomatis. Mikrokontroler ATmega16 memiliki Port I/O yang difungsikan untuk menerima masukan (Input) dari sensor dan
Gambar 3.4 Sistem Minimum Mikrokontroler AVR ATmega16
3.4.2. Rangkaian Sensor Ultrasonik PING
Gambar 3.5 Rangkaian Ultrasonik
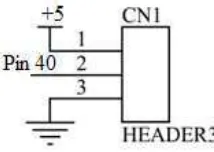
3.4.3. Rangkaian LiquidCrystalDisplay (LCD)
Dalam perancangan pengereman mobil otomatis pada tugas akhir ini, digunakan Liquid Crystal Display (LCD) dengan jumlah karakter 16x2. LCD digunakan
sebagai indikator jarak dan kecepatan.
Gambar 3.6 Rangkaian Liquid Crystal Display (LCD)
3.4.5. Rangkaian Driver Motor (L293D)
.
Gambar 3.7 Rangkaian Driver Motor Menggunakan L298
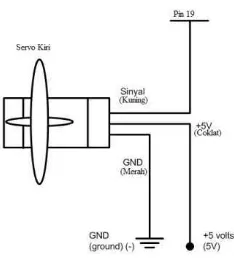
3.4.6. Rangkaian Motor Servo
Dalam perancangan pengereman mobil otomatis pada tugas akhir ini, digunakan Motor Servo dengan berat 9gr dan torsi 1,2 - 1,4 kg/cm. Motor Servo digunakan sebagai aktuator untuk pengereman pada prototype mobil.
Gambar 3.8 Rangkain Motor Servo 3.5. Gambaran Sistem
yang bersamaan hasil yang telah ditentukan dari logika fuzzy akan diteruskan kembali oleh mikrokontoler untuk memberikan perintah pada motor servo(pengontrol rem) dan melakukan pengereman secara otomatis.
S
V =y’
a
Obsta cle
Gambar 3.9 Proses Pengereman Otomatis
3.6 Kontrol Logika Fuzzy
Tabel 3.7 Fungsi Keanggotaan Pada Pengereman Mobil
v (kecepatan mobil) s (jarakmobil) a (kekuatan rem )
Tinggi Jauh Rem Penuh
Rendah Dekat Rem Sedang
Rem Sedikit
Tabel 3.8 Aturan Fuzzy Pada Pengereman Mobil
Kecepatan
3.7 Perancangan Perangkat Lunak
Mulai
49
Pada bab ini akan diuraikan mengenai proses pengujian dari sistem yang dirancang. Dimana pengujian yang dilakukan meliputi pengukuran terhadap parameter-parameter komponen input/masukan, proses dan output/keluaran yang terdapat dalam sistem yang dirancang yang kemudian dilanjutkan dengan menganalisis hasil-hasil pengukuran tersebut. Hal ini bertujuan untuk melihat sistem yang dirancang berjalan sesuai dengan yang dirancang.
4.1 Pengujian dan Analisis Bagian Masukan (Input)
Pengujian dan analisis bagian masukan (input) terdiri dari pengujian sensor jarak dan kecepatan. Pengujian ini dilakukan untuk mendapatkan parameter-parameter sistem kerja dari setiap komponen masukan.
4.1.1 Pengujian Sensor Jarak
Gambar 4.1 Penempatan Sensor Ultrasonik pada Prototype
Tabel 4.1 Tabel Hasil Pengukuran Jarak Menggunakan Sensor Ultrasonik Pada Bidang Datar
Jarak yang diukur secara manual
Jarak yang terukur oleh sensor
3cm 3cm
50cm 50cm
92cm 92cm
98cm 98cm
102cm 102.2cm
155cm 155.7cm
200cm 200.3cm
250cm 250.3cm
280cm 280.6cm
311cm 311.3cm
Ja
Gambar 4.2 Grafik Pengukuran Jarak Menggunakan Sensor Ultrasonik Pada Bidang Datar
Gambar 4.3 Tampilan LCD menggunakan Sensor Ultrasonik
4.1.2. Pengujian Pulse Width Modulation (PWM)
Tabel 4.2 Tabel Hasil Pengukuran Kecepatan Menggunakan Sensor Optocupler
Dari hasil pengujian pada Tabel 4.2didapatkan hasil data secara realtime dengan sensor optocoupler, hasil percobaan menunjukan motor akan berhenti pada PWM 10% dan bobot roda mobil yang berputar dilantai mempengaruhi lambatnya kecepatan yang diperoleh.
4.2. Pengujian Dan Analisis Bagian Proses
Gambar 4.4 Tampilan Listing Program Fuzzyfikasi Kecepatan
Gambar 4.5 Tampilan Listing Program Fuzzyfikasi Jarak
Gambar 4.7 Tampilan Listing Program Rule Fuzzy
Gambar 4.8 Tampilan Listing Program Defuzzyfikasi
4.3. Pengujian Dan Analisis Bagian Keluaran (Output)
Pengujian dan analisis bagian keluaran(output) terdiri dari pengujian Liquid Crystal Display (LCD)dan Motor Servo sebagai pengereman. Pengujian ini dilakukan untuk mendapatkan parameter-parameter sistem kerja dari setiap komponen keluaran tersebut. Selain itu, untuk melihat komponen-komponen keluaran tersebut berkerja sesuai dengan fungsinya.
4.3.1. Pengujian Tampilan LCD
Liquid Crystal Displayberupa bagian yang berfungsi untuk memberikan
tampilan berupa jarak, kecepatan dan kekuatan rem pada mobil prototype. Tampilan untuk pengguna ini diletakan pada tengahmobil prototype sebagai penganti speedometer.
Gambar 4.9 Hasil Pengujian Tampilan LCD
Gambar 4.9 merupakan tampilan LCD ketika mobil prototype dalam kondisi aktif dan siap melakukan simulasi pengereman.
4.3.2. Pengujian Motor Servo
pengaturan rem pada mobil berbasis mikrokontroler menggunakan logika fuzzyadalah Motor Servo jenis analog yang memiliki torsi 1,2 – 1,4 kg/cm
dengan range sudut 0
°
-
180°
.Tabel 4.6 Pengujian Motor Servo
Pulsa Servo Putaran Motor
Servo Kekuatan Rem
3ms 70
°
Rem Sedikit(20 %)
2ms 90
°
Rem Sedang(50 %)
2ms Setelah 90
°
130
°
Rem Penuh (100 %)4.4. Analisis Kinerja Perangkat Secara Keseluruhan
Tabel 4.7 Pengujian Keseluruhan
4.5. Analisis Keluaran Rem Pada Kontrol Logika Fuzzy
Pengamatan hasil keluaran kontrollogika fuzzy dimaksudkan untuk mendapatkan pengereman yang sesuai dengan harapan. Pengamatan dilakukan dengan memberikan nilai masukan jarak dan kecepatan, dan didapatkan hasil pengereman.
Hasil pertama menggunakan percobaan dari fungsi keanggotaan yang
dibuat.
Gambar 4.10 Fungsi Keanggotan Jarak
Gambar 4.11 Fungsi Keanggotaan Rem Tabel 4.9 Aturan Fuzzy Pada Pengereman Mobil
V S
Rendah Tinggi
Dekat Sedang Penuh
Jauh Sedikit Sedang
Untuk mendapatkan setiap nilai keluaran pada tabel 4.9 maka harus menentukan nilai-nilai yang dibutuhkan. Yang pertama dilakukan yaitu menentukan nilai jarak pada mobil dan nilai kecepatan untuk setiap masukan.Berikut beberapa contoh untuk mendapatkan nilai keluaran pada pengereman.
(94.22%).
Gambar 4.7 Hasil Percobaan Pada Prototype
Gambar 4.8 Hasil Perhitungan Kontrol Logika Fuzzy Dengan Matlab Dengan hasil perhitungan secara manual didapat hasil sebagai berikut. Kecepatan= 60 , Jarak= 84.62
µtinggi = (60; 40, 80, 110, 120)
�� � �−− , , −�− , = �� � −
− , ,
−
− , = .
µrendah = (60; -2, -1, 20, 60)
�� � �−− , , −�− , = �� � − −
− − − , ,
−
− , =
µjauh = (84.6; 80, 160, 210, 220)
�� � �−− , , −�− , = �� � . −
− , ,
− .
− , = . 7
�� � �−− , , −�− , = �� � . − −
− − , ,
− .
− , = .
W1= min (µrendah, µdekat ) = min (0, 0.442) = 0 W2= min (µtinggi,µdekat ) = min (0.5, 0.442) = 0.442 W3= min (µrendah, µjauh) = min (0, 0.057) = 0 W4= min (µtinggi,µjauh ) = min (0.5, 0.057) = 0.057 Centroid Of Area
Z= � +� +� +�
� +� +� +� =
+ . + + .
+ . + + . =
.
. = 94.2
2. Jika kecepatan tinggi (v= 60) dan jarak jauh (s= 202.97cm) maka rem sedang (50%).
Gambar 4.9 Hasil Percobaan Rem Sedang Pada Prototype
Dengan hasil perhitungan secara manual didapat hasil sebagai berikut. Kecepatan= 60 , Jarak= 202.97
µtinggi = (60; 40, 80, 110, 120)
Gambar 4.11 Hasil Percobaan Rem Sedang Pada Prototype
Gambar 4.12 Hasil Perhitungan Kontrol Logika Fuzzy Dengan Matlab Dengan hasil perhitungan secara manual didapat hasil sebagai berikut. Kecepatan= 40 , Jarak= 95.93
µtinggi = (60; 40, 80, 110, 120)
�� � �−− , , −�− , = �� � −
− , ,
−
− , =
µrendah = (40; -2, -1, 20, 60)
�� � �−− , , −�− , = �� � − −
− − − , ,
−
− , = .
µjauh = (95.93; 80, 160, 210, 220)
�� � �−− , , −�− , = �� � . −
− , ,
− .
− , = . 99
�� � �−− , , −�− , = �� � . − −
− − , ,
− .
− , = .
W1= min (µrendah, µdekat ) = min (0.5, 0.301) = 0.301 W2= min (µtinggi,µdekat ) = min (0, 0.301) = 0
W3= min (µrendah, µjauh) = min (0.5, 0.199) = 0.199 W4= min (µtinggi,µjauh ) = min (0, 0.199) = 0 Centroid Of Area
Rem= � +� +� +�
� +� +� +� =
. + + . +
. + + . + =
.
. = 38.06
Hasil kedua menggunakan percobaan dari fungsi keanggotaan referensi.
Gambar 4.13 Fungsi Keanggotaan Jarak
Gambar 4.15 Fungsi Keanggotaan Rem Tabel 4.10 Aturan Fuzzy Pada Pengereman Mobil V
S
ES VS S M F VF EF
EC LB LB MB HB VHB VHB VHB
VC VLB LB LB MB HB VHB VHB
C VLB VLB LB LB HB HB VHB
APR VLB VLB VLB LB MB MB HB
Jarak Mobil(cm) Kecepatan Mobil Rem Mobil
EC = Extreme Close ES = Exteme Slow VLB = Very Light Break VC = Very Close VS = Very Slow LB = Light Break
C = Close S = SLow MB = Medium Break
APR = Approacing M = Medium HB = Heavy Break
F = Fast VHB = Very Heavy
Break VF = Very Fast
EF = Extreme Fast
Gambar 4.16 Hasil Percobaan Pada Prototype
Gambar 4.17 Hasil Perhitungan Kontrol Logika Fuzzy Dengan Matlab 2. Jika kecepatan sedangM (v= 60) dan jarak jauh APR (s= 203.40cm) maka rem
sedikitLB (22.5%).
Gambar 4.19 Hasil Perhitungan Kontrol Logika Fuzzy Dengan Matlab 3. Jika kecepatan sedang M (v= 40) dan jarak dekatVC (s= 96.13cm) maka rem
sedikit HB(45%).
Gambar 4.21 Hasil Perhitungan Kontrol Logika Fuzzy Dengan Matlab Tabel 4.11 Perbandinganpresentase penekanan pada rem
Kecepatan Jarak Rem
FIS-1 FIS-2 FIS-1 FIS-2 FIS-1 FIS-2 60 60 84.62 84.65 94.2% 54.7% 60 60 202.97 203.40 50% 22.5% 40 40 95.93 96.13 38.05% 45%
Hasil analisis pada kontrol logika fuzzy baik secara perhitungan matematis maupun dengan matlab didapat hasil yang presisi dengan hasil pada mobil prototype.Hasil percobaan kedua mendapatkan hasil yang lebih baik dari
3.6. Skenario Pengujian
Setelah mendapatkan hasil analisis dari pengujian keseluruhan maka selanjutnya mobil prototype diuji dengan skenario pengujian yang telah dibuat, tujuan ini berfungsi agar simulasi mobil prototype mendapatkan hasil yang baik di berbagai macam halangan.
v= 10 0 , s=
50cm , rem
=
100%
Ljal an = 80
cm
Gambar 4.13 Skenario 1
Gambar 4.14 Hasil Simulasi Skenario 1 Pada Prototype
V=10
Gambar 4.16 Hasil Simulasi Skenario 1 Pada Prototype
Gambar 4.18 Hasil Simulasi Skenario 2 Pada Prototype
Pada Gambar 4.17 diatas skenario dengan dua obstacle dimana mobil (a) berada didepan mobil (c) sedangkan mobil (b) berada disebelah kiri, mobil (c) yang telah terintegrasi dengan pengereman otomatis melaju dengan kecepatan 100% pada jarak 50cm mobil (c) akan melakukan pengereman 100%. Mobil akan berhenti total berjarak ± 5-10 cm dengan obstacle didepannya.Penempatan sensor pun harus diperhatikan agar sensor mendapatkan hasil jarak yang presisi.
Dari hasil pengujian (baik secara perangkat keras/hardware maupunperangkat lunak/software) dan pengukuran yang telah dilakukan, hasil yangdidapatkan telah sesuai dengan apa yang akan dirancang dalam tugas akhir ini. Dimana pada perangkat masukan/input terdapat sensor ultrasonik PING yang berfungsi sebagai pendeteksi adanya obstacle didepan mobil.Semua perangkat masukan tersebut dapat bekerja dengan baik serta dapat memberikan masukan pada mikrokontroler untuk selanjutnya diproses.
Pada perangkat pemroses (mikrokontroler AVR ATMega 16) bekerja dengan baik. Dimana ketika diberi instruksi program untuk membaca setiap masukan dari perangkat masukan, mikrokontroler akan melakukan eksekusi terhadap perangkat keluaran sesuai dengan instruksi program yang telah dibuat.
pada mobil prototype.Terdapat buzzeryang berfungsi untuk memberikan informasi berupa bunyi ketika mobil prototype dalam keadaan jarak darurat. Terdapat motor servo yang berfungsi sebagai pengereman pada mobil prototype, motor servo
72 5.1. Kesimpulan
Berdasarkan hasil perancangan dan pengujian serta analisis data dari sistem otomatisasi pengaturan rem pada mobil berbasis mikrokontoler menggunakan logika fuzzy yang dibahas pada penulisan laporan tugas akhir ini, dapat diambil beberapa kesimpulan yang berkaitan dengan hasil analisis yang mengacu kepada tujuan perancangan dan pembuatan sistem otomatisasi pengaturan rem pada mobil berbasis miktrokontoler menggunakan logika fuzzy ini.
1. Hasil dari fungsi keanggotaan jarak dapat dijabarkan bahwa jarak dekat bernilai antara 0-40cm dan jarak jauh bernilai antara 160-300cm. Fungsi keanggotaan kecepatan dapat dijabarkan bahwa kecepatan rendah bernilai antara 0-245cm/s dan kecepatan tinggi bernilai antara 353-471cm/s. Dan fungsi keanggotaan rem dapat dijabarkan bahwa rem sedikit bernilai 20-45%, rem sedang bernilai antara 50-75% dan rem penuh bernilai antara 80-100%.
2. Pada hasil pengujian skenario didapat mobil prototype dapat melaju diantara mobil (obstacle) lain dengan lebar 50cm dan pengereman mobil prototype berhenti total berjarak ± 5-10 cm dengan obstacle didepannya.
4. Sistem keseluruhan pada mobil prototype ini sudah berjalan sesuai yang diharapkan,dari mulai pembacaan masukan/input dari sensor, pemrosesan yang diolah oleh mikrokontoler hingga keluaran/output yang mengesekusi hasil akhir kerja dari sistem ini.
5. Penerapan metode logika fuzzy untuk sebuah pengereman secara otomatis berhasil diterapkan pada mobil prototype dalam tugas akhir ini.
6. Terdapat kekurangan dari alat sistem otomatisasi pengaturan rem pada mobil berbasis miktrokontoler menggunakan logika fuzzy yang dirancang ini, yaitu jarak yang terdeteksi oleh sensor ultrasonik PING terlalu pendek dan tidak memungkinkan untuk diaplikasikan pada mobil sebenarnya.
5.2. Saran
Untuk pengembangan dan peningkatan lebih lanjut dari sistem otomatisasi pengaturan rem pada mobil berbasis mikrokontroler menggunakan logika fuzzy ini ada beberapa poin yang perlu diperhatikan dalam perancangannya.
1. Dimensi dari pada prototype lebih diperbesar sehingga simulasi yang diberikan akan tampak seperti mobil sebenarnya.
2. Menggunakan jenis sensor jarak yang memiliki range lebih jauh dan memiliki sensitivitas yang baik.