1 BAB I PENDAHULUAN
1.1 Latar Belakang
Pada zaman sekarang ini sudah banyak sekali tempat-tempat pusat perbelanjaan, rekreasi, rumah sakit, dan universitas yang selalu ramai dengan adanya pengunjung, bertambahnya jumlah mobil pribadi saat ini menimbulkan permintaan lahan parkir yang sangat luas. Tidak mudah untuk menemukan lahan parkir yang masih tersedia atau yang sudah terisi oleh mobil lainya, dan akibatnya harus berputar dan mencari lahan parkir yang masih kosong lainya. Dengan adanya kasus seperti ini sangat dibutuhkan informasi lahan parkir secara otomatis dan cerdas, dengan menggunakan metode image processing (pengolahan citra) yang dapat berperan sebagai pendeteksi lahan parkir yang masih tersedia dan yang sudah terisi pada gedung tersebut yang nantinya akan ditampilkan pada monitor yang sudah dipasang pada pintu masuk area parkir tersebut dalam bentuk denah parkir, dengan demikian calon pengguna area parkir dapat mengetahui lahan parkir yang masih tersedia.
1.2 Identifikasi Masalah
Adapun identifikasi masalah dalam pembuatan tugas akhir ini adalah sebagai berikut.
2. Kurangnya informasi lahan parkir bagi calon pengguna lahan parkir untuk menemukan lahan parkir yang masih tersedia.
1.3 Rumusan Masalah
Berdasarkan permasalahan yang teridentifikasi di atas, maka dapat dirumuskan beberapa rumusan masalah sebagai berikut.
1. Bagaimana caranya membuat sistem yang mampu mendeteksi jumlah kendaraan dari gambar yang tertangkap oleh kamera.
2. Bagaimana cara memberikan informasi lahan parkir secara jelas kepada calon pengguna lahan parkir secara realtime.
1.4 Tujuan
Adapun tujuan dari pembuatan tugas akhir ini adalah sebagai berikut. 1. Untuk membuat sistem yang dapat mengetahui jumlah mobil yang sedang
mengisi lahan parkir dari gambar yang ditangkap oleh kamera.
2. Merancang sebuah sistem yang dapat membantu pengguna mobil untuk mencari lahan parkir yang tersedia.
3
1.5 Batasan Masalah
Dalam Merancang dan membuat Tugas akhir ini, penulis membatasi beberapa batasan masalah sebagai berikut.
1. Sistem ini menggunakan program MATLAB.
2. Lahan parkir yang digunakan berupa miniatur dari Basement 1 UNIKOM. 3. Hanya menggunakan dua kamera saja.
4. Posisi kamera sudah ditetapkan sedemikian rupa.
5. Pengambilan gambar menggunakan webcam Logitech 270h. 6. Diasumsikan mobil parkir dalam keadaan paralel.
1.6 Metoda Penelitian
Metode penelitian yang digunakan dalam pembuatan sistem informasi lahan parkir ini dan penyusunan karya tulis ini adalah sebagai berikut.
1. Studi Literatur
Melakukan pencarian dan pengumpulan data serta informasi dari berbagai sumber baik dari buku maupun internet dan melakukan percakapan atau tanya jawab dengan para pakar/ahli yang berkaitan langsung dengan objek yang akan diteliti.
2. Perencanaan pembuatan sistem
Pada metode ini penulis mengerjakan beberapa kegiatan yang berkaitan dengan hardware dan software.
3. Pengujian
4. Evaluasi
Melakukan evaluasi dari hasil yang sudah dilakukan selama dalam proses pembuatan alat tersebut.
5. Perbaikan dan Penyempurnaan
Dalam metode ini dilakukan perbaikan dan penyempurnaan bila masih terdapat kesalahan yang ada pada produk.
1.7 Sistematika Penulisan
Sistematika penulisan tugas akhir ini terdiri dari 5 (lima) BAB, dengan masing-masing bab sebagai berikut :
BAB I PENDAHULUAN
Berisi tentang latar belakang, identifikasi masalah, tujuan, rumusan masalah, batasan masalah, metode penelitian dan sistematika penulisan.
BAB II TINJAUAN PUSTAKA
Bab ini menjelaskan tentang teori-teori pendukung yang berhubungan dengan pembuatan sistem tersebut serta perangkat pendukung yang digunakan.
BAB III PEMBUATAN DAN PERANCANGAN ALAT
Bab ini menjelaskan tentang proses atau alur pengerjaan ya serta tahapan-tahapan desain program yang dimasukan pada MATLAB.
BAB IV ANALISA DAN PEMBAHASAN
5
BAB V PENUTUP
6 2.1 Pengolahan Citra Digital
Pengolahan citra digital (digital image processing) adalah manipulasi dan interprestasi dari citra dengan bantuan komputer. Pengolahan citra biasanya digunakan untuk memperbaiki kualitas citra, melakukan proses penarikan informasi atau deskripsi objek yang terkandung dalam citra, dan melakukan kompresi atau reduksi data.
Berdasarkan dari jenisnya suatu citra dapat diklasifikasikan menjadi 2 jenis yaitu citra kontinu dan citra diskrit (citra digital). Citra kontinu diperoleh dari sistem optik yang menerima sinyal analog, seperti manusia dan kamera analog sedangkan citra diskrit (citra digital) dihasilkan melalui proses digitalisasi terhadap citra kontinu, adapun penjelasan lebih lanjut mengenai kedua jenis citra adalah sebagai berikut.
2.1.1 Citra Kontinu
Citra kontinu adalah fungsi intensitas 2 dimensi f(x,y), adapun x dan y adalah koordinat spasial, dan f pada titik (x,y) merupakan tingkat kecerahan (brightness) suatu citra pada suatu titik.
2.1.2 Citra Diskrit
7
direpresentasikan dengan f(x,y), dimana x dan y menyatakan koordinat posisi piksel itu berada, dan nilai f(x,y) menunjukan intensitas (derajat keabuan) piksel atau picture element pada koordinat tersebut. Piksel itu sendiri merupakan satuan atau elemen terkecil dari citra yang menempati suatu posisi yang menentukan resolusi citra tersebut.
Misalkan f merupakan sebuah citra digital 2 dimensi berukuran NxM. Maka representasi f dalam sebuah matriks dapat dilihat pada gambar dibawah ini, dimana f(0,0) berada pada sudut kiri atas dari matriks tersebut, sedangkan f(n-1,m-1) berada pada sudut kanan bawah.
Gambar 2.1 Resolusi Spasial
2.2 Piksel
2.2.1 Resolusi
Resolusi adalah jumlah pixel per daerahnya. Resolusi menentukan kualitas dari gambar. Jika suatu gambar diperbesar, maka resolusi gambar akan menjadi kecil dan gambar menjadi tidak tajam. Semakin tinggi resolusi gambar, maka akan semakin tinggi kemampuan perbesarannya.
2.2.2 Intensitas
Pixel yang membentuk suatu gambar memiliki warna-warna tertentu. Jumlah warna yang dimiliki suatu gambar disebut intensitas. Intensitas gambar mempunyai beberapa jenis istilah yaitu 256 warna, high color, 16 juta warna (true color), gradasi abu-abu (grayscale), dan hitam-putih (black&white). Semakin banyak jumlah warna dalam suatu gambar maka akan semakin bagus. Jumlah warna maksimum dari gambar dapat dilihat dari jenis (ekstensi) filenya. File gambar berekstensi .jpg memiliki jumlah warna maksimum 16 juta warna, file gambar berekstensi .gif memiliki jumlah warna maksimum 265 warna.
2.3 Warna pada Citra Digital
9
mempunyai intensitas sendiri dengan nilai maksimum 255 (8-bit). Misal warna kuning merupakan kombinasi dari warna merah dan hijau sehingga nilai RGB: 255 255 0.
2.3.1 Citra Warna (True Color)
Citra warna atau lebih dikenal dengan sebutan citra RGB (red, green, blue). Citra RGB adalah citra yang warna dasar penyusunnya adalah warna merah,
hijau, dan biru. Warna selain itu adalah warna hasil perpaduan dari ketiga warna tersebut. Setiap piksel pada citra warna mewakili warna yang merupakan kombinasi tiga warna dasar, yaitu merah, hijau, dan biru (RGB = Red, Green, Blue). Setiap warna dasar menggunakan penyimpanan 8 bit = 1 byte (nilai maksimum 255 warna), jadi satu piksel pada citra warna diwakili oleh 3 byte.
2.3.2 Citra Grayscale (Skala Keabuan)
Citra grayscale atau citra skala keabuan mempunyai kemungkinan warna antara hitam (minimal) dan putih (maksimal). Jumlah maksimum warna sesuai dengan bit penyimpanan yang digunakan. Jika pada skala keabuan 4bit, maka jumlah kemungkinan adalah 2 = 16 warna, dengan kemungkinan warna 0 (minimal) sampai 15 (maksimal). Banyaknya warna tergantung pada jumlah bit yang disediakan pada memori untuk menampung kebutuhan warna tersebut. Semakin besar jumlah bit warna yang disediakan memori, maka semakin halus gradasi warna yang terbentuk.
� = �+�+� ……….. (2.1) Persamaan (2.1) menggunakan nilai rata-rata dari ketiga layer matriks, persamaan (2.1) adalah standar persamaan grayscale pada televisi, baik sistem PAL (Phase Alternation Line) maupun NTSC (National Television System Committee).
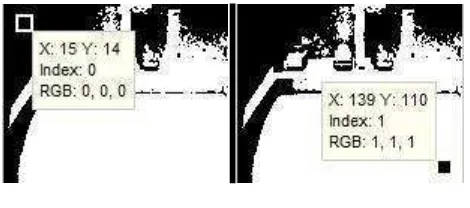
2.3.3 Citra Biner (Monokrom)
Citra biner adalah citra yang setiap titik atau pikselnya bernilai 0 atau 1 dengan representasi warna hitam = 0, dan warna putih = 1. Untuk menyimpan kedua warna ini dibutuhkan 1 bit pada memori. Contoh dari susunan piksel pada citra monokrom adalah sebagai berikut :
Gambar 2.2 Susunan pixel pada citra monokrom Ada beberapa keuntungan dari citra biner yaitu :
Memori yang digunakan menjadi lebih kecil dikarenakan nilai derajat
keabuannya hanya membutuhkan representasi satu bit.
Waktu yang digunakan untuk pengolahan datanya lebih cepat
11
2.4 Thresholding
Thresholding adalah suatu metode yang digunakan untuk memisahkan antara obyek dan backgroundnya. Thresholding adalah teknik yang sederhana tapi efektif untuk segmentasi citra. Proses Thresholding sering disebut dengan proses binerisasi. Dalam proses thresholding terhadap sebuah citra, hasil yang diperoleh tidak selalu memuaskan dan sesuai dengan keinginan. Hal ini dikarenakan faktor penghambat seperti pencahayaan yang tidak merata atau citra yang kabur yang menyebabkan histogram tidak bisa dipartisi dengan baik. Citra hasil thresholding biasanya digunakan lebih lanjut untuk proses pengenalan obyek serta ekstraksi fitur. Metode thresholding secara umum dibagi menjadi dua, yaitu :
Thresholding global :
Thresholding yang dilakukan dengan mempartisi histogram dengan menggunakan sebuah threshold (batas ambang) global T, yang berlaku untuk seluruh bagian pada citra.
Thresholding adaptif :
Thresholding yang dilakukan dengan cara membagi citra menggunakan beberapa sub citra. Lalu pada setiap sub citra, segmentasi dilakukan dengan menggunakan threshold yang berbeda.
2.5 Cropping
Gambar 2.3a Metode cropping Gambar 2.3b Cropping pada MATLAB Gambar 2.3a adalah metode cropping dan Gambar 2.3b adalah cara melakukan cropping pada MATLAB. pada Gambar 2.3b 104 adalah x dan 31 adalah y, maka 5,5 adalah ∆x dan ∆y.
2.6 Histrogram
Histogram merupakan suatu bagan yang menampilkan distribusi intensitas dalam indeks atau intensitas warna citra. Matlab menyediakan fungsi khusus untuk pengolahan histogram citra, yaitu imhist(). Fungsi imhist untuk menghitung jumlah piksel-piksel suatu citra untuk setiap jarak warna (0-255). Fungsi imhist ini hanya dirancang untuk menampilkan histogram citra dengan format abu-abu (grayscale). Oleh karena itu, agar bisa menampilkan histogram true color (RGB) maka perlu memodifikasi fungsi imhist.
2.7 Edge Detection
Edge Detection (deteksi tepi) pada suatu citra digital adalah suatu proses yang menghasilkan tepi-tepi dari obyek-obyek citra, tujuannya adalah:
Untuk menandai bagian yang menjadi detail citra.
Untuk memperbaiki detail dari citra yang kabur, yang terjadi karena error
13
Suatu titik (x,y) dikatakan sebagai tepi (edge) dari suatu citra bila titik tersebut mempunyai perbedaan yang tinggi dengan tetangganya.
Gambar 2.4 Proses deteksi tepi citra
Tepian dari suatu citra berada pada titik yang memiliki perbedaan intensitas yang lebih tinggi. Berdasarkan prinsip-prinsip filter pada citra, maka tepian suatu citra dapat diperoleh menggunakan High Pass Filter (HPF), yang mempunyai karakteristik,
∑ ∑ , = 0………..(2.2)
Ada beberapa macam metode yang sering digunakan dalam proses deteksi tepi, diantaranya adalah metode Robert, metode Prewitt, metode Sobel dan metode Canny. Pada penelitian ini metode yang digunakan adalah metode Background subtraction.
Ada tiga macam tepi yang terdapat di dalam citra digital. Ketiganya adalah:
2. Tepi landai Disebut juga tepi lebar, yaitu tepi dengan sudut arah yang kecil. Tepi landai dapat dianggap terdiri dari sejumlah tepi-tepi lokal yang lokasinya berdekatan.
3. Tepi yang mengandung derau (noise) Umumnya tepi yang terdapat pada aplikasi computer vision mengandung derau. Operasi peningkatan kualitas citra (image enhancement) dapat dilakukan terlebih dahulu sebelum pendeteksian tepi.
Gambar 2.5 Jenis-jenis tepi
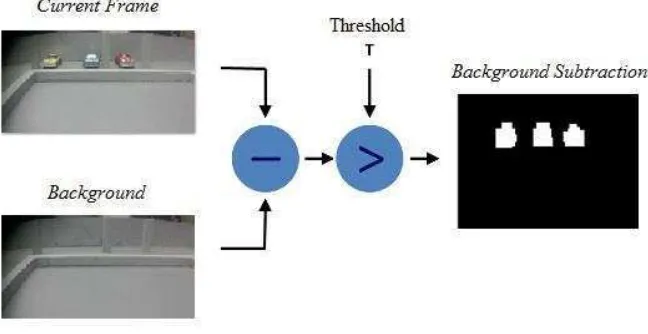
2.7.1 Background Subtraction
Background Subtraction atau yang juga dikenal sebagai Foreground
Detection, adalah salah satu teknik pada bidang pengolahann citra dan computer
vision yang bertujuan untuk mendeteksi/mengambil foreground dari background
15
Proses deteksi benda bergerak dengan metode background subtraction ini didasarkan pada perbedaan antara background referensi dengan frame.
2.7.2 Tahapan Proses Pendeteksian Tepi
Berikut adalah beberapa tahapan dalam pendeteksian tepi : 1. Image Acquisittion
Akuisisi citra merupakan tahap awal pada pendeteksi tepi, pada tahap ini citra akan diambil/ditangkap menggunakan kamera. Kamera yang umum digunakan pada tahapan ini dapat berupa kamera analog atau digital. Untuk citra yang diambil dengan menggunakan kamera analog perlu dilakukan konversi kedalam bentuk citra digital.
2. Pra Processing (preprocessing)
Pada tahap ini dilakukan proses grayscale terhadap citra yang akan dideteksi tepi citranya.
Proses grayscalling : adalah proses untuk mengubah gambar yang
memiliki warna menjadi gambar yang memiliki tingkat warna ke abu-abuan.
Gambar yang akan di-gray-scalling nilai tiap titik akan disamakan
dengan nilai red-green-bluenya sehingga untuk setiap titik hanya memiliki 1 nilai saja, yang disebut nilai gray-levelnya
Pada dasarnya proses ini dilakukan dengan meratakan nilai pixel
3. Segmentasi
Pada tahap ini citra yang telah diubah menjadi grayscale akan dideteksi tepi citranya menggunakan analisis sobel.
4. PostProcessing
Pada tahapan ini akan dihasilkan citra yang berupa citra yang hanya terdiri dari gambar hitam putih yang memiliki tepi citra.
2.8 Unsur-unsur Citra Digital
Terdapat unsur-unsur dasar yang terkandung dalam citra digital, diantaranya adalah sebagai berikut.
2.8.1 Kecerahan (Intensitas Cahaya)
Kecerahan disebut juga sebagai intensitas cahaya. Kecerahan pada suatu titik (piksel) di dalam suatu citra sebenarnya adalah intensitas rata-rata dari suatu area yang melingkupinya.
2.8.2 Kontras
17
2.8.3 Kontur
Kontur adalah keadaan yang ditimbulkan oleh perubahan intensitas pada pixel-pixel yang bertetangga. Karena adanya perubahan intensitas inilah, maka tepi-tepi (edge) objek pada citra dapat dideteksi.
2.8.4 Warna (color)
Warna adalah persepsi yang dirasakan oleh sistem visual manusia terhadap panjang gelombang cahaya yang dipantulkan oleh objek. Setiap warna mempunyai panjang gelombang ( ) yang berbeda-beda. Warna yang diterima oleh sistem visual manusia (mata) merupakan hasil kombinasi cahaya dengan panjang gelombang yang berbeda-beda. Kombinasi warna yang memberikan rentang warna yang paling lebar adalah red (R), green(G), dan blue(B).
2.8.5 Bentuk (shape)
Bentuk adalah properti intrinsik dari objek tiga dimensi. Bentuk merupakan properti intrinsik utama untuk sistem visual manusia karena manusia lebih sering menginterpretasikan suatu objek berdasarkan bentuknya daripada elemen lainnya.
2.8.6 Tekstur
2.9 Mikrokontroller Arduino Mega
Arduino Mega 2560 adalah merupakan board mikrokontroler berbasis ATMega2560. Modul ini memiliki 54 digital input/output di mana 14 digunakan untuk PWM output dan 16 digunakan sebagai analog input, 4 untuk UART, 16 MHz osilator kristal, koneksi USB, power jack, ICSP Header, dan tombol reset. Modul ini memiliki segalanya yang dibutuhkan untuk memrogram mikrokontroler seperti kabel USB dan sumber daya melalui adaptor ataupun baterai.
Gambar 2.6 Arduino Mega
Development board Arduino Mega 2560 R3 telah dilengkapi dengan polyfuse
19
Tabel 2.1 Deskripsi Arduino Mega
Mikrokontroller ATmega2560 Tegangan Kerja 5V
Tegangan Masukan (Rekomendasi) 7-12V Tegangan Masukan (Batas) 6-20V
I/O 54 pin (14 pin untuk PWM) digunakan sebagai input atau output, dengan menggunakan fungsi pinMode(), digitalWrite(), dan digital(Read). Pin-pin tersebut bekerja pada tegangan 5V, dan setiap pin dapat menyediakan atau menerima arus sebesar 20mA, dan memiliki tahanan pull-up sekitar 20-50k ohm (secara default dalam posisi disconnect). Nilai maksimum adalah 40mA, yang sebisa mungkin dihindari untuk menghindari kerusakan chip mikrokontroller
Beberapa pin memiliki fungsi khusus yaitu
Serial, memiliki 4 serial yang masing-masing terdiri dari 2 pin. Serial 0 :
External Interrups, yaitu pin 2 (untuk interrupt 0), pin 3 (interrupt 1), pin
18 (interrupt 5), pin 19 (interrupt 4), pin 20 (interrupt 3), dan pin 21 (interrupt 2). Dengan demikian Arduino Mega 2560 memiliki jumlah interrupt yang cukup melimpah : 6 buah. Gunakan fungsi attachInterrupt()
untuk mengatur interrupt tersebut.
PWM: Pin 2 hingga 13 dan 44 hingga 46, yang menyediakan output PWM
8-bit dengan menggunakan fungsi analogWrite()
SPI : Pin 50 (MISO), 51 (MOSI), 52 (SCK), dan 53 (SS) mendukung
komunikasi SPI dengan menggunakan SPI Library
LED : Pin 13. Pada pin 13 terhubung built-in led yang dikendalikan oleh
digital pin no 13. Set HIGH untuk menyalakan led, LOW untuk
memadamkan nya.
TWI : Pin 20 (SDA) dan pin 21 (SCL) yang mendukung komunikasi TWI
dengan menggunakan Wire Library
Arduino Mega 2560 R3 memiliki 16 buah input analog. Masing-masing pin analog tersebut memiliki resolusi 10 bits (jadi bisa memiliki 1024 nilai). Secara default, pin-pin tersebut diukur dari ground ke 5V, namun bisa juga menggunakan
pin AREF dengan menggunakan fungsi analogReference(). Beberapa in lainnya pada board ini adalah :
AREF. Sebagai referensi tegangan untuk input analog.
Reset. Hubungkan ke LOW untuk melakukan reset terhadap
21
2.9.2 Catu Daya
Board Arduino Mega 2560 dapat ditenagai dengan power yang diperoleh dari
koneksi kabel USB, atau via power supply eksternal. Pilihan power yang digunakan akan dilakukan secara otomatis
External power supply dapat diperoleh dari adaptor AC-DC atau bahkan baterai,
melalui jack DC yang tersedia, atau menghubungkan langsung GND dan pin Vin yang ada di board. Board dapat beroperasi dengan power dari external power supply yang memiliki tegangan antara 6V hingga 20V. Namun ada beberapa hal
yang harus anda perhatikan dalam rentang tegangan ini. Jika diberi tegangan kurang dari 7V, pin 5V tidak akan memberikan nilai murni 5V, yang mungkin akan membuat rangkaian bekerja dengan tidak sempurna. Jika diberi tegangan lebih dari 12V, regulator tegangan bisa over heat yang pada akhirnya bisa merusak pcb. Dengan demikian, tegangan yang di rekomendasikan adalah 7V hingga 12V
Beberapa pin power pada Arduino Mega : GND. Ini adalah ground atau negatif.
Vin. Ini adalah pin yang digunakan jika anda ingin memberikan power
langsung ke board Arduino dengan rentang tegangan yang disarankan 7V - 12V
Pin 5V. Ini adalah pin output dimana pada pin tersebut mengalir tegangan
5V yang telah melalui regulator
3V3. Ini adalah pin output dimana pada pin tersebut disediakan tegangan
IOREF. Ini adalah pin yang menyediakan referensi tegangan
mikrokontroller. Biasanya digunakan pada board shield untuk memperoleh tegangan yang sesuai, apakah 5V atau 3.3V
2.9.3 Komunikasi
Arduino Mega R3 memiliki beberapa fasilitas untuk berkomunikasi dengan komputer, berkomunikasi dengan Arduino lainnya, atau dengan mikrokontroller lain nya. Chip Atmega2560 menyediakan komunikasi serial UART TTL (5V) yang tersedia di pin 0 (RX) dan pin 1 (TX). Chip ATmega16U2 yang terdapat pada board berfungsi menterjemahkan bentuk komunikasi ini melalui USB dan akan tampil sebagai Virtual Port di komputer. Firmware 16U2 menggunakan driver USB standar sehingga tidak membutuhkan driver tambahan.
2.9.4 Komunikasi Data
23
ATmega328P ini juga mendukung komunikasi I2C (TWI) dan SPI. Fungsi ini digunakan untuk melakukan komunikasi interface pada sistem.
2.9.5 Programming
Bahasa pemograman pada mikrokontrollernya memiliki bahasa sendiri yaitu bahasa Arduino, dimana bahasa Arduino ini adalah single board microntroller (mikrokontroler dalam satu papan rangkaian) yang bersifat open
source, merupakan turunan dari Platform Wiring dan dirancang agar pembuatan
proyek mikrokontroler menjadi lebih mudah dilakukan oleh semua kalangan. Sistem Arduino adalah berupa hardware menggunakan chip Atmel AVR, software yang berupa bahasa pemrograman standar C, serta bootloader yang
dipasang pada chip utama.
Arduino Mega dapat diprogram dengan perangkat lunak Arduino, pertama
pilih Arduino Mega dari Tool lalu sesuaikan dengan mikrokontroler yang digunakan. ATmega2560 pada Mega Arduino memiliki bootloader yang memungkinkan Anda untuk meng-upload program baru tanpa menggunakan downloader eksternal. Komunikasi menggunakan protokol dari bahas C. Sistem
25 BAB III
PERANCANGAN ALAT DAN PEMBUATAN SOFTWARE
Dalam bab ini akan membahas mengenai perancangan dan realisasi sistem yang akan dibuat menggunakan MATLAB dan hardware yang digunakan merupakan miniatur tahap awal dari lahan parkir UNIKOM.
3.1 Perancangan Sistem
Perancangan dan pembuatan alat ini secara umum terdiri dari tiga bagian utama, yaitu masukan (input), proses (process), dan keluaran (output). Pada Gambar 3.1 dibawah ini terlihat bahwa setiap bagian dari sistem ini memiliki fungsi yang berbeda, namun akan saling berkaitan dalam pengontrolan keluaranya (output).
Gambar 3.1 Blok Diagram Sistem
Pada gambar diatas memperlihatkan bagian-bagian perancangan sistem pengolahan citra untuk sistem informasi lahan parkir ini, yang meliputi beberapa bagian penting, yaitu :
Masukan (input) terdiri dari dua buah masukan, yaitu kamera 1 dan kamera 2 yang menghasilkan capture 1 dan capture 2. Kedua masukan ini juga disebut sebagai masukan awal sebelum dilakukan proses pengolahan citra yang akan dilakukan dengan software MATLAB untuk mendeteksi jumlah kendaraan dari masing-masing lahan yang tersedia.
Bagian Proses
Pada bagian ini hasil capture dari kedua buah kamera diolah menggunakan MATLAB untuk mendeteksi jumlah kendaraan. Mendeteksi jumlah kendaraan dilakukan dengancara membandingkan background dengan hasil capture dan dilanjutkan ke proses segmentasi.
Bagian Keluaran (Output)
27
Gambar 3.2 Tampilan Simulasi di MATLAB
Miniatur atau prototype ini telah disesuaikan dengan Basement 1 Unikom dengan skala 1:50. Dalam prototype ini terdapat webcam USB sebagai alat untuk mengambil gambar yang berupa masukan (input).
Gambar 3.3 Tampilan Prototype
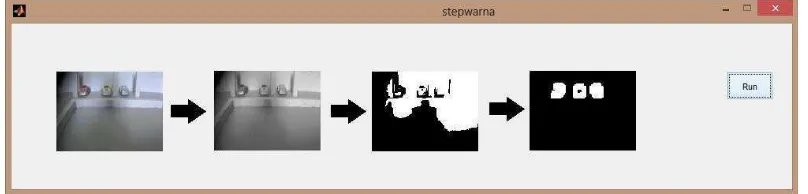
3.2 Perancangan Software
Hasil capture dari kamera 1 dan kamera 2 merupakan masukan awal untuk melanjutkan ke proses selanjutnya. Hasil dari capture ini adalah citra asli yang nantinya akan diproses untuk mendeteksi dan mengetahui berapa jumlah objek dari hasil capture tersebut. Untuk mengetahui jumlah kendaraan pada lahan parkir yang sudah disediakan dilakukan beberapa pemrosesan yaitu, konversi citra asli ke grayscale, konversi citra grayscale ke biner, pemisahan objek dengan latar menggunakan background subtraction, proses segmentasi, dan penentuan jumlah kendaraan.
3.2.1 Konversi Citra Asli ke Grayscale
Didalam tahap ini hasil capture yang merupakan citra asli akan dikonversikan ke dalam bentuk warna yang lain yaitu mode warna grayscale, yang bertujuan untuk menyederhanakan informasi warna yang terdapat pada ketiga layer matriks warna yaitu Red, Green, dan Blue (RGB) menjadi satu layer yang bernilai dari perkalian ketiga layer matriks warna tersebut dengan konstanta atau dengan cara melakukan rata-rata dari ketiga matriks.
29
Hasil capture yang berupa citra asli (gambar 3.4a) dirubah menjadi format grayscale (gambar 3.4b) dan mengalami perubahan nilai. Citra grayscale disimpan dalam format 8bit untuk setiap sample piksel, yang memungkinkan sebanyak 256 intensitas. Untuk mengubah citra berwarna yang mempunyai nilai matrik masing-masing red (R), green (G) dan blue (B) menjadi citra grayscale dengan nilai X, maka konversi dapat dilakukan dengan mengambil rata-rata dari nilai R, G dan B.
Gambar 3.5 Gambar Visualisasi 256 Aras Keabuan
3.2.2 Konversi Citra Grayscale ke Biner
Citra biner (binary image) adalah citra digital yang hanya memiliki 2 kemungkinan warna, yaitu hitam dan putih. Citra biner disebut juga dengan citra B&W (Black&White) atau citra monokrom. Hanya dibutuhkan 1 bit untuk mewakili nilai setiap piksel dari citra biner yaitu nilai 1 dan 0.
derajat keabuan lebih besar dari nilai batas akan diberi nilai 1 dan sebaliknya piksel dengan derajat keabuan lebih kecil dari nilai batas akan diberi nilai 0.
Gambar 3.7 Citra biner yang terdiri dari nilai 1 dan 0
3.2.3 Pemisahan Objek dengan Latar Menggunakan Metode Background Subtraction
31
Gambar 3.8 Proses dari background subtraction
Dengan melakukan hal ini maka akan mempermudah untuk mendeteksi jumlah kendaraan. Hal ini dikarenakan nilai dari setiap piksel pada gambar yang sudah melalui proses ini sangatlah tegas, sehingga sulit untuk mendeteksi nilai bernilai 1 dan bernilai 0.
3.2.4 Segmentasi
3.2.5 Pendeteksian Jumlah Kendaraan
Penentuan jumlah kendaraan ditentukan berdasarkan perbandingan background dengan hasil capture yang sudah ada objeknya dengan proses image processing.
Gambar 3.9 Background, Citra Asli, dan Hasil Deteksi
Jumlah objek yang terapat pada hasil capture sebanyak 3 buah, setelah melakukan proses segmentasi dan background subtraction maka background dibandingkan dengan hasil capture maka jumlah yang terdeteksi sebanyak 3 buah.
3.3 Rangkaian Lampu Indikator Lahan Parkir
Led berwarna hijau digunakan sebagai indikator lahan parkir yang berjumlah sebanyak 16 buah yang mewakili 16 lahan parkir. Apabila led berwana hijau pada salah satu lahan parkir mati maka lahan tersebut sudah terisi oleh kendaraan, dan apabila sebaliknya maka artinya lahan parkir tersebut kosong.
33
Masukan untuk led ini berupa data yang diterima oleh Arduino Uno dari komunikasi serial. Kondisi pada saat penyalaan led akan sesuai dengan axes yang ada pada pemrograman MATLAB.
3.4 Perancangan Perangkat Lunak
Sistem informasi lahan parker ini menggunakan aplikasi MATLAB 2012a yang terhubung dengan komunikasi serial ke Arduino untuk menyalakan output led sebagai informasi lahan parker yang tersedia dan juga sebagai informasi lokasi
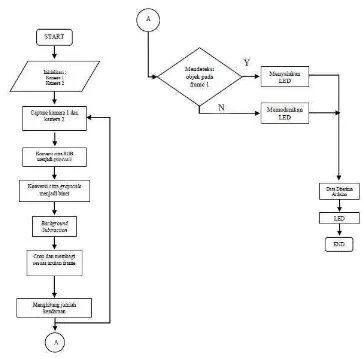
lahan parker tersebut. Flowchart dari sistem ini dapat dilihat pada Gambar 3.11 dibawah ini.
Pada saat program sudah berjalan yang pertama dilakukan adalah inisialisasi kedua buah kamera, lalu masing-masing kamera tersebut mengambil gambar (capture). hasil dari capture ini dirubah kedalam format grayscale, hal ini dilakukan agar mempermudah nantinya ketika dirubah kedalam format biner. Dengan format citra yang sudah dirubah kedalam format biner, dilakukan Background Subtraction untuk memisahkan benda pada latar. Background
Subtraction membandingkan gambar saat ini dengan gambar referensi atau latarnya fungsinya untuk mendeteksi adanya berubahan pixel. Setelah itu dilakukan proses crop yang bertujuan untuk membagi citra menjadi frame, hal ini bertujuan untuk mempermudah penghitungan objek dan penentuan lokasi dimana lahan parkir yang tersedia dan tidak. Berikut ini adalah langkah-langkah dari proses pengolahan citra
Gambar 3.12 Langkah-langkah dari proses pengolahan citra
35 BAB IV
PENGUJIAN DAN ANALISA
Pada bab ini akan diuraikan tentang proses pengujian dari sistem yang akan dibuat. Pengujian sistem ini akan dilakukan dengan 2 (dua) cara, yaitu menggunakan pengujian secara parsial dan pengujian secara keseluruhan.
4.1 Pengujian Sistem Secara Parsial
Pengujian secara parsial fungsinya untuk mengetahui proses dari masing-masing sistem yang akan dibuat nantinya. Terdapat beberapa blok sistem yang akan dibuat, yaitu:
1. pemasangan kamera USB dan pengambilan gambar (capture),
2. image processing untuk mendeteksi jumlah kendaraan dan lokasinya, 3. hubungan komunikasi serial dengan Arduino dan led indikator,
4.1.1 Pemasangan Kamera USB dan Pengambilan Gambar (Capture)
Gambar 4.1 Letak Kamera Pada Lahan parkir
Pengambilan gambar (capture) sangat dibutuhkan karena sebagai data awalan yang nantinya akan diolah menggunakan MATLAB.
4.1.2 Image Processing Untuk Mendeteksi Jumlah Kendaraan dan Lokasinya
Hasil akhir dari pengolahan citra ini merupakan jumlah kendaraan yang dideteksi dari hasil capture yang telah dicrop secara otomatis guna membaginya kedalam beberapa bagian agar mudah untuk mengetahui lokasi dari lahan yang terdeteksi kendaraan. Berikut hasil pendeteksian kendaraan dari masing-masing hasil capture.
Tabel 4.1 Pendeteksian dengan Jumlah Kendaraan 0
Capture Hasil Capture dan
Lokasi Jumlah Pada MATLAB
Jumlah Sebenarnya
37
Sangat diperlukan untuk melakukan percobaan dengan tidak menggunakan kendaraan karena posisi awal dari parkiran mulai kosong hingga terisi penuh nantinya, dan percobaan ini dengan melakukan 1 kali percobaan untuk pendeteksian dengan jumlah kendaraan 0 memiliki tingkat keberhasilan sebanyak 100% dan error yang diperoleh sebesar 0%.
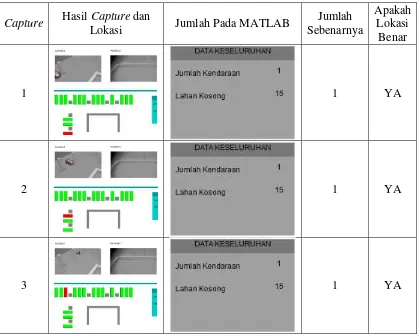
Tabel 4.2 Pendeteksian dengan Jumlah Kendaraan 1
Capture Hasil Capture dan
Lokasi Jumlah Pada MATLAB
Jumlah Sebenarnya
Apakah Lokasi
Benar
1 1 YA
2 1 YA
4 1 YA
5 1 YA
6 1 YA
7 1 YA
8 1 YA
39
Hasil dari 10 kali percobaan untuk pendeteksian kendaraan dan lokasi
dimana kendaraan tersebut berjumlah 1 buah. � % = maka tingkat
keberhasilanya sebanyak 100% dan error yang diperoleh sebesar 0%.
Tabel 4.3 Pendeteksian dengan Jumlah Kendaraan 2
10 1 YA
Capture Hasil Capture dan
Lokasi Jumlah Pada MATLAB
Jumlah Sebenarnya
Apakah Lokasi
Benar
1 2 YA
2 2 YA
4 2 YA
5 2 YA
6 2 YA
7 2 YA
8 2 YA
41
Hasil dari 10 kali percobaan untuk pendeteksian kendaraan dan lokasi
dimana kendaraan tersebut berjumlah 2 buah. � % = maka tingkat
keberhasilanya sebanyak 100% dan error yang diperoleh sebesar 0%.
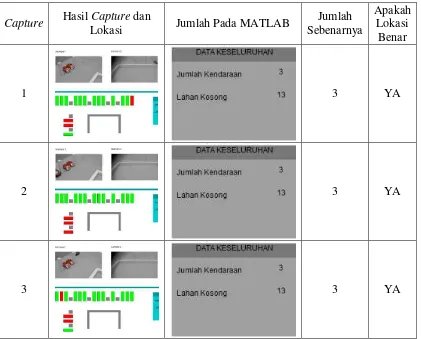
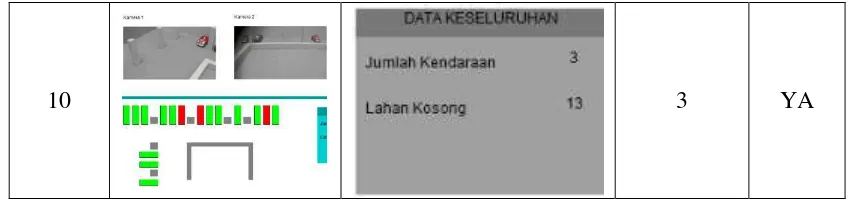
Tabel 4.4 Pendeteksian dengan Jumlah Kendaraan 3
10 2 YA
Capture Hasil Capture dan
Lokasi Jumlah Pada MATLAB
Jumlah Sebenarnya
Apakah Lokasi
Benar
1 3 YA
2 3 YA
4 3 YA
5 3 YA
6 3 YA
7 3 YA
8 3 YA
43
Hasil dari 10 kali percobaan untuk pendeteksian kendaraan dan lokasi
dimana kendaraan tersebut berjumlah 3 buah. � % = maka tingkat
keberhasilanya sebanyak 100% dan error yang diperoleh sebesar 0%.
Tabel 4.5 Pendeteksian dengan Jumlah Kendaraan 6
10 3 YA
Capture Hasil Capture dan
Lokasi Jumlah Pada MATLAB
Jumlah Sebenarnya
Apakah Lokasi
Benar
1 4 YA
2 4 YA
4 4 YA
5 4 YA
6 4 YA
7 4 YA
8 4 YA
45
Hasil dari 10 kali percobaan untuk pendeteksian kendaraan dan lokasi
dimana kendaraan tersebut berjumlah 4 buah. � % = maka tingkat
keberhasilanya sebanyak 100% dan error yang diperoleh sebesar 0%.
. Tabel 4.6 Pendeteksian dengan Jumlah Kendaraan 5
10 4 YA
Capture Hasil Capture dan
Lokasi Jumlah Pada MATLAB
Jumlah Sebenarnya
Apakah Lokasi
Benar
1 5 YA
2 5 YA
4 5 YA
5 5 YA
6 5 YA
7 5 YA
8 5 YA
9 5 YA
47
Hasil dari 10 kali percobaan untuk pendeteksian kendaraan dan lokasi
dimana kendaraan tersebut berjumlah 5 buah. � % = maka tingkat
keberhasilanya sebanyak 100% dan error yang diperoleh sebesar 0%.
Tabel 4.7 Pendeteksian dengan Jumlah Kendaraan 6
Capture Hasil Capture dan
Lokasi Jumlah Pada MATLAB
Jumlah Sebenarnya
Apakah Lokasi
Benar
1 6 YA
2 6 YA
3 6 YA
4 6 YA
Hasil dari 10 kali percobaan untuk pendeteksian kendaraan dan lokasi
dimana kendaraan tersebut berjumlah 6 buah. � % = maka tingkat
keberhasilanya sebanyak 100% dan error yang diperoleh sebesar 0%.
6 6 YA
7 6 YA
8 6 YA
9 6 YA
49
Tabel 4.8 Pendeteksian dengan Jumlah Kendaraan 7
Capture Hasil Capture dan
Lokasi Jumlah Pada MATLAB
Jumlah Sebenarnya
Apakah Lokasi
Benar
1 7 YA
2 7 YA
3 7 YA
4 7 YA
5 7 YA
Hasil dari 10 kali percobaan untuk pendeteksian kendaraan dan lokasi
dimana kendaraan tersebut berjumlah 7 buah. � % = maka tingkat
keberhasilanya sebanyak 100% dan error yang diperoleh sebesar 0%.
7 7 YA
8 7 YA
9 7 YA
51
Tabel 4.9 Pendeteksian dengan Jumlah Kendaraan 8
Capture Hasil Capture dan Lokasi Jumlah Pada MATLAB
Jumlah Sebenarnya
Apakah Lokasi
Benar
1 8 YA
2 8 YA
3 8 YA
4 8 YA
Hasil dari 10 kali percobaan untuk pendeteksian kendaraan dan lokasi
dimana kendaraan tersebut berjumlah 8 buah. � % = maka tingkat
keberhasilanya sebanyak 100% dan error yang diperoleh sebesar 0%.
6 8 YA
7 8 YA
8 8 YA
9 8 YA
53
Tabel 4.10 Pendeteksian dengan Jumlah Kendaraan 9
Capture Hasil Capture dan Lokasi Jumlah Pada MATLAB
Jumlah Sebenarnya
Apakah Lokasi
Benar
1 9 YA
2 9 YA
3 9 YA
4 9 YA
Hasil dari 10 kali percobaan untuk pendeteksian kendaraan dan lokasi
dimana kendaraan tersebut berjumlah 9 buah. � % = maka tingkat
keberhasilanya sebanyak 100% dan error yang diperoleh sebesar 0%.
6 9 YA
7 9 YA
8 9 YA
9 9 YA
55
Tabel 4.11 Pendeteksian dengan Jumlah Kendaraan 10
Capture Hasil Capture dan Lokasi Jumlah Pada MATLAB Jumlah Sebenarnya
Apakah Lokasi
Benar
1 10 YA
2 10 YA
3 10 YA
4 10 YA
Hasil dari 10 kali percobaan untuk pendeteksian kendaraan dan lokasi
dimana kendaraan tersebut berjumlah 10 buah. � % = maka tingkat
keberhasilanya sebanyak 100% dan error yang diperoleh sebesar 0%.
6 10 YA
7 10 YA
8 10 YA
9 10 YA
57
Tabel 4.12 Pendeteksian dengan Jumlah Kendaraan 11
Capture Hasil Capture dan Lokasi Jumlah Pada MATLAB Jumlah Sebenarnya
Apakah Lokasi
Benar
1 11 YA
2 11 YA
3 11 YA
4 11 YA
Hasil dari 10 kali percobaan untuk pendeteksian kendaraan dan lokasi
dimana kendaraan tersebut berjumlah 11 buah. � % = maka tingkat
keberhasilanya sebanyak 100% dan error yang diperoleh sebesar 0%.
6 11 YA
7 11 YA
8 11 YA
9 11 YA
59
Tabel 4.13 Pendeteksian dengan Jumlah Kendaraan 12
Capture Hasil Capture dan Lokasi Jumlah Pada MATLAB
Jumlah Sebenarnya
Apakah Lokasi
Benar
1 12 YA
2 12 YA
3 12 YA
4 12 YA
Hasil dari 10 kali percobaan untuk pendeteksian kendaraan dan lokasi
dimana kendaraan tersebut berjumlah 12 buah. � % = maka tingkat
keberhasilanya sebanyak 100% dan error yang diperoleh sebesar 0%.
6 12 YA
7 12 YA
8 12 YA
9 12 YA
61
Tabel 4.14 Pendeteksian dengan Jumlah Kendaraan 13
Capture Hasil Capture dan Lokasi Jumlah Pada MATLAB
Jumlah Sebenarnya
Apakah Lokasi
Benar
1 13 YA
2 13 YA
3 13 YA
4 13 YA
Hasil dari 10 kali percobaan untuk pendeteksian kendaraan dan lokasi
dimana kendaraan tersebut berjumlah 13 buah. � % = maka tingkat
keberhasilanya sebanyak 100% dan error yang diperoleh sebesar 0%.
6 13 YA
7 13 YA
8 13 YA
9 13 YA
63
Tabel 4.15 Pendeteksian dengan Jumlah Kendaraan 14
Capture Hasil Capture dan Lokasi Jumlah Pada MATLAB
Jumlah Sebenarnya
Apakah Lokasi
Benar
1 14 YA
2 14 YA
3 14 YA
4 14 YA
Hasil dari 10 kali percobaan untuk pendeteksian kendaraan dan lokasi
dimana kendaraan tersebut berjumlah 14 buah. � % = maka tingkat
keberhasilanya sebanyak 100% dan error yang diperoleh sebesar 0%.
6 14 YA
7 14 YA
8 14 YA
9 14 YA
65
Tabel 4.16 Pendeteksian dengan Jumlah Kendaraan 15
Capture Hasil Capture dan Lokasi Jumlah Pada MATLAB Jumlah Sebenarnya
Apakah Lokasi
Benar
1 15 YA
2 15 YA
3 15 YA
4 15 YA
Hasil dari 10 kali percobaan untuk pendeteksian kendaraan dan lokasi
dimana kendaraan tersebut berjumlah 15 buah. � % = maka tingkat
keberhasilanya sebanyak 100% dan error yang diperoleh sebesar 0%.
6 15 YA
7 15 YA
8 15 YA
9 15 YA
67
Tabel 4.17 Pendeteksian dengan Jumlah Kendaraan 16
Capture Hasil Capture dan Lokasi Jumlah Pada MATLAB Jumlah Sebenarnya
Apakah Lokasi
Benar
1 16 YA
2 16 YA
3 16 YA
4 16 YA
Hasil dari 10 kali percobaan untuk pendeteksian kendaraan dan lokasi
dimana kendaraan tersebut berjumlah 16 buah. � % = maka tingkat
keberhasilanya sebanyak 100% dan error yang diperoleh sebesar 0%.
6 16 YA
7 16 YA
8 16 YA
9 16 YA
69
Dari pengujian image processing di atas dapat dilihat bahwa seberapa baik dan akuratnya dari pendeteksian kendaraan yang dihasilkan. Dengan melakukan 10 kali percobaan dari masing-masing jumlah kendaraan dan lokasi yang berbeda-beda, maka hasil dari pengujian yang didapat juga berbeda-beda. Berikut adalah tingkat keberhasilan dan error dari hasil deteksi kendaraan.
Tabel 4.18 Tingkat Keberhasilan Deteksi Kendaraan
Jumlah Kendaraan Tingkat Keberhasilan (%) Error (%)
0 100 0
Rata-rata Tingkat Keberhasilan = 100% Error % = 0%
4.1.3 Hubungan Komunikasi Serial dengan Arduino dan led Indikator Tahapan ini merupakan tahapan terakhir dalam pembuatan sistem informasi lahan parker kendaraan roda empat di unikom menggunakan image processing ini. Program MATLAB 2012a yang dikirim ke Arduino Mega melalui komunikasi serial adalah berupa data dari kondisi-kondisi penyalaan led indikator pada papan pengumuman informasi parkir. Berikut data yang akan dikirim ke Arduino melalui MATLAB.
ser=serial('COM3'); %Inisialisasi komunikasi serial pada PORT3 fopen(ser);
71
frame yang sudah ditentukan dan apabila tidak mendeteksi objek maka merubah warna axes6 menjadi warna hijau, dan juga dihubungkan dengan komunikasi serial untuk menyalakan led pada Arduino dengan mengirim data “h” apabila mendeteksi kendaraan dan mengirim data “g” apabila tidak mendeteksi objek. Berikut ini
keterkaitan penyalaan led pada Arduino. void setup() {
Serial.begin(9600); pinMode(47, OUTPUT); }
void loop() {
if (Serial.available() > 0) { byte dataku = Serial.read();
Pin 47 adalah salah satu pin pada Arduino yang digunakan untuk indikator pada papan pengumuman informasi lahan parkir, arti dari coding diatas adalah apabila Arduino mendeteksi adanya data “g” pada komunikasi serial yang dikirim melalui
4.2 Pengujian Sistem Secara Keseluruhan
Untuk mengetahui kemampuan kerja sistem secara umum maka dilakukan pengujian secara keseluruhan. Pengujian dilakukan dengan cara menyamakan indikator axes yang berada pada MATLAB dengan keluaran berupa led yang berada pada hardware sebagai indikatornya.
a. Kondisi pada saat lahan parkir sedang kosong.
Gambar 4.2 Lahan parkir pada saat kosong
73
Gambar 4.4 Kondisi papan informasi ketika lahan sedang kosong
b. Kondisi pada saat lahan parkir sedang terisi.
Gambar 4.5 Lahan parkir pada saat terisi
Gambar 4.7 Kondisi papan informasi ketika lahan sedang terisi
75 BAB V KESIMPULAN
5.1 Kesimpulan
Setelah melakukan perancangan dan pembuatan sistem untuk pembangunan sistem informasi lahan parkir berbasis pengolahan citra kemudian dilakukan pengujian dan analisa, maka dapat diambil beberapa kesimpulan tentang kinerja sistem yang telah dibuat, yaitu :
1. sistem dapat mendeteksi objek yang tertangkap oleh kamera dengan baik sehingga dapat dengan mudah menghitung jumlah lahan yang sedang tersedia,
2. hardware yang berupa denah parkir sebagai output yang terdapat led sebagai indikator lahan yang tersedia dan seven segment sebagai indikator jumlah lahan yang tersedia mempermudah calon pengguna lahan parkir untuk menentukan lokasi yang tersedia,
3. dengan membagi beberapa gambar menjadi sejumlah frame dan menggunakan metode korelasi silang yang sudah tersedia pada matlab maka dapat dengan mudah menentukan lokasi dari lahan parkir yang masih tersedia,
5.2 Saran
76
citra, agar nantinya dapat tercipta suatu lahan parkir yang bersifat otomatis. 2. Diharapkan juga sistem dapat digunakan pada area parkir yang bersifat
RANCANG BANGUN SISTEM INFORMASI LAHAN PARKIR
KENDARAAN RODA EMPAT DI UNIKOM MENGGUNAKAN
IMAGE PROCESSING
SKRIPSI
Laporan ini Disusun Untuk Memenuhi Salah Satu Syarat Kelulusan Menempuh Pendidikan Program Sarjana Program Studi Teknik Elektro
Disusun Oleh :
LEONARD SATRIO TEGAR 1.31.10.005
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS TEKNIK DAN ILMU KOMPUTER
Jenis Kelamin
: Kubang Utara 02 No 9 Sekeloa, Bandung : Jakarta, 18 Agustus 1992 Program Studi Teknik Elektro Strata 1 Konsentrasi Kendali
Agustus 2014 - September 2014 PT.AQUA GOLDEN MISSISSIPPI (Kerja Praktek) Pembuatan Kemasan 240ml
(2013-2014) (2013)
: Anggota Himpunan Mahasiswa Teknik Elektro UNIKOM : Anggota divisi Roket UNIKOM
- Mengerti dan dapat mengoprasikan Microsoft Office, AutoCAD, Personal Computer - Mengerti Installasi Komputer dan Jaringan
- Ujian Hardware Komputer dengan Predikat Istimewa 2013 - Pelatihan Membuat PC Router Menggunakan ClearOS 2013
iv
2.2.2 Intensitas………...7
2.3 Warna pada Citra Digital………..7
2.3.1 Citra Warna (True Color)……….8
2.3.2 Citra Grayscale (Skala Keabuan)……….8
2.3.3 Citra Biner (Monokrom)………...9
2.4 Thresholding………...……….10
2.5 Cropping………...……11
2.6 Histogram………...11
2.7 Edge Detection……….…11
2.7.1 Background Subtraction………....13
2.7.2 Tahapan Proses Pendeteksi Tepi………..14
2.8 Unsur-unsur Citra Digital……….15
2.8.1 Kecerahan (Intensitas Cahaya)……….15
v
2.9.4 Komunikasi Data………...21
2.9.5 Programing………....22 BAB III PERANCANGAN ALAT DAN PEMBUATAN SOFTWARE 3.1 Perancangan Sistem……….23
3.2 Perancangan Software………...26
3.2.1 Konversi Citra Asli ke Grayscale………....26
3.2.2 Konversi Citra Grayscale ke Biner………..27
3.2.3 Pemisahan Objek dengan Latar Menggunakan Metode Background Subtraction……….………28
3.2.4 Segmentasi………...29
3.2.5 Pendeteksi Jumlah Kendaraan……….30
3.3 Rangkaian Lampu Indikator Lahan Parkir………...30
3.4 Perancangan Perangkat Lunak………31
BAB IV PENGUJIAN DAN ANALISA 4.1 Pengujian Sistem Secara Parsial……….34
4.1.1 Pemasangan Kamera USB dan Pengambilan Gambar (Capture)………...…34
4.1.2 Image Processing Untuk Mendeteksi Jumlah Kendaraan dan Lokasinya………...35
4.2 Pengujian Sistem Secara Keseluruhan………....74
vi
DAFTAR PUSTAKA………...…78
77
77
DAFTAR PUSTAKA
[1] N. True,. “Vacant Parking Space Detection in Static Image” 9500 Gilman Drive, La Jolla, CA 92093, University of California, San Diego.
[2] T. Sutoyo, S.Si, M.Kom., E. Mulyanto, S.Si, M.Kom., Suhartono, Dr., O. D. Nurhayati, M.T., Wijanarto, M.Kom, “Teori Pengolahan Citra Digital ”, ANDI, Yogyakarta, 2009.
[3] S. Banerjee, P. Choudekar, Prof M. K. Muju,. “Implementation Of Image Perocessing Real Time Car Prking System” , Indian Journal of Computer
Science and Engineering ( IJCSE).Vol.2 No.1.ISSN : 0976- 5166
[4] Pratt, Wiliam K, Digital Image Processing, New Jersey : John Wiley & Sons, 2007.
i Puji syukur penulis ucapkan ke hadirat Allah SWT yang telah memberikan rahmat dan hidayah-Nya sehingga penulis dapat menyelesaikan perancangan alat dan penyusunan laporan tugas akhir dengan judul “Rancang Bangun Sistem Informasi
Lahan Parkir Kendaraan Roda Empat di UNIKOM Menggunakan Image Processing”.
Adapun maksud penyusunan laporan Tugas Akhir ini adalah bertujuan untuk
menyelesaikan program studi S1 dan merupakan salah satu syarat dalam menempuh ujian
sarjana Jurusan Teknik Elektro Universitas Komputer Indonesia (UNIKOM) Bandung.
Dalam penulisan laporan tugas akhir ini, tentunya banyak pihak yng telah memberikan bntuan baik moril maupun materil. Oleh karena itu, dalam kesempatan ini saya ingin menyampaikan ucapan terima kasih kepada :
1. Orang tua dan keluarga yang senantiasa memberikan semangat dan doa restu.
2. Bapak Prof. Dr. H. Denny Kurniadie, Ir., M.Sc., selaku Dekan Fakultas Teknik dan Ilmu Komputer, Universitas Komputer Indonesia, Bandung. 3. Bapak Muhammad Aria, M.T. sebagai Ketua Program Studi Teknik
Elektro UNIKOM.
ii 5. Bapak Jana Utama, M.T., selaku Dosen Pembimbing yang senantiasa membantu serta mendampingi penulis selama pembuatan alat dan penulisan laporan tugas akhir ini.
6. Mia Nugraha dan rekan-rekan mahasiswa Jurusan Teknik Elektro, Iqbal, Deden, Dio, Yudi, Sandra, Gilang, Ayugi, Rifqi dan yang lainnya atas kebersamaan dan persahabatan selama ini, sehingga perkuliahan menjadi semakin berwarna serta berbagai bantuan dan semangat yang senantiasa diberikan kepada penulis sehingga penulis dapat menyelesaikan tugas akhir dan penulisan laporan tugas akhir ini.
7. Berbagai pihak yang tidak dapat penulis sebutkan satu persatu yang telah memberikan bantuan baik materi maupun moril sehingga penulis dapat menyelesaikan tugas akhir dan penulisan laporan tugas akhir ini.
Akhir kata, dengan segala kerendahan hati, penulis memanjatkan doa kepada Allah SWT, semoga amal dan budi yang telah mereka berikan kepada penulis mendapat pahala dari-Nya. Amin.
Bandung, Januari 2016