APLIKASI PEMBANGKIT PWM PADA MIKROKONTROLER ATMega 8535 UNTUK MENGENDALIKAN SUHU PEMANAS AIR (HEATER)
SKRIPSI
LEOTHAMRIN GULTOM 060801054
PROGRAM STUDI SARJANA FISIKA DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
APLIKASI PEMBANGKIT PWM PADA MIKROKONTROLER ATMega 8535 UNTUK MENGENDALIKAN SUHU PEMANAS AIR (HEATER)
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar Sarjana Sains
LEOTHAMRIN GULTOM 060801054
PROGRAM STUDI SARJANA FISIKA DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
M OTTO DAN PERSEM BAHAN
“ Siapa mengejar kebenaran dan kasih akan memperoleh
kehidupan, kebenaran dan kehormatan (Amsal 21:21) ”
“ Pengetahuan akan segala sesuatu hal adalah mungkin
(L eonardo da vinci) ”
“ K apan pun, dimana pun ingatlah siapa dirimu ”
“ K epahitan hidup menjadikan kita kuat ”
Tugas akhir ini kupersembahkan kepada :
1.
Tuhan Yesus K ristus
2.
K edua orang tua saya : Sudin Gultom & L amria
Simanjuntak
3.
Abang/ Kakak / Adek
4.
Seluruh Keluarga
5.
M asyarakat perekayasa elektronika, khususnya
bidang kendali dan sistem cerdas.
PERSETUJUAN
Judul : APLIKASI PEMBANGKIT PWM PADA MIKROKONTROLER ATMega 8535 UNTUK MENGENDALIKAN SUHU PEMANAS AIR (HEATER)
Kategori : SKRIPSI
Nama : LEOTHAMRIN GULTOM Nomor Induk Mahasiswa : 060801054
Program Studi : SARJANA (S1) FISIKA Departemen : FISIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN ALAM (MIPA) UNIVERSITAS SUMATERA UTARA
Diluluskan di
Medan, 10 Mei 2011
Komisi Pembimbing :
Diketahui
Departemen Fisika FMIPA USU Pembimbing Ketua,
PERNYATAAN
APLIKASI PEMBANGKIT PWM PADA MIKROKONTROLER ATMega 8535 UNTUK MENGENDALIKAN SUHU PEMANAS AIR (HEATER)
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing- masing disebutkan sumbernya.
Medan, 10 Mei 2011
PENGHARGAAN
Puji dan syukur penulis panjatkan kepada Tuhan Yesus Kristus yang telah memberikan kekuatan, petunjuk dan anugerah-Nya, Sehingga penulis dapat menyelesaikan skripsi ini, dengan judul : “ Aplikasi Pembangkit PWM Pada Mikrokontroler ATMega 8535 Untuk Mengendalikan Suhu Pemanas Air (Heater)”.
Penulis juga mengucapkan banyak terima kasih kepada :
1. Bapak Dr.Sutarman, M.Sc selaku Dekan FMIPA USU, Bapak Dr. Marhaposan Situmorang selaku Ketua Jurusan, dan Dra. Yustinon selaku Sekretaris Jurusan, beserta seluruh Civitas Akademika FMIPA USU.
2. Bapak Dr. Kerista Tarigan M.Eng.Sc yang telah banyak memberikan bimbingan dan motivasi dalam menyelesaikan skripsi ini.
3. Bapak Tua Raja Simbolon S.Si, M.Si selaku dosen wali saya yang telah banyak memberikan motivasi selama perkuliahan.
4. Keluarga tercinta, khusunya kedua orang tua saya (Ayahanda Sudin Gultom dan Ibunda Lamria br. Simanjuntak ) atas kasih sayang, kerja kerasnya dalam mencukupi kebutuhan saya, doa dan motivasinya.
5. Rommel & keluarga, Berton, Poltar, Dermawan, Arjuna, Evi, Renon, atas doa yang selalu mendoakan saya, serta motivasinya.
6. Seluruh Keluarga
7. Fanny Nurcahaya Hutasoit, atas cinta, kasih sayang, perhatian, motivasi/ semangat, nasihat dan doanya.
8. Bakti U Siburian atas dukugan moral dan materil
9. KK EFATA (Henny, Farto, Frans, Kata, Mey, Rianto, Roslina, Flora) atas motivasi dan dukungan doanya.
10.Pudan, Fitry, Evi Tantri, Cinarty atas semangat dan dukungan doanya.
11.Anak kost Agave 11 dan 13 ( Efdianus, Sutrisno, Jamintar, Endang, Aprido, dll yang tidak disebutkan satu persatu)
12.Teman-teman asisten Lab. Elektronika Industri (Chandra, Elfrida, Yanti) 13.Anderson, Elisda, Doddi, Kiki, Laosmaria, Mardiah, Hakim, Deri, Indra,
Rahmadhani, Erik, Nurhalimah, Novi, Nova, Eko, Handri, Bento, Heber dan rekan stambuk ’06 yang lainnya yang telah memberikan semangat.
14.Senior dan Junior Jurusan Fisika FMIPA USU 15.Bapak & Ibu kost buat nasihatnya.
Medan, 10 Mei 2011
ABSTRAK
Aplikasi Pembangkit PWM Pada Mikrokontroler ATmega 8535 Untuk Mengendalikan Suhu Pemanas Air (Heater)
Telah dilakukan perancangan sebuah pemanas air (heater) yang suhunya dikendalikan dengan menggunakan PWM. Sebagai pusat pengendalian dari seluruh alat yang dirancang digunakan mikrokontroler ATmega8535. Selain itu sistem yang dirancang dilengkapi dengan sebuah sensor suhu jenis LM35 yang digunakan untuk mendeteksi setiap perubahan temperatur yang terjadi pada heater yang hasilnya akan ditampilkan ke LCD. PWM merupakan sebuah metode untuk membangkitkan sinyal keluaran yang periodenya berulang antara high dan low . Sinyal tersebut kemudian dikontrol lebarnya sesuai dengan nilai temperatur yang diinputkan sebelumnya dari keypad. Hasil pengamatan menunjukan bahwa rancangan pembangkit PWM telah berfungsi dengan baik untuk mengontrol suhu pemanas air
ABSTRACT
Application Generator PWM On Microcontroller ATmega 8535 For Water Heater Temperature Control (Heater)
Having done design a water heater (heater) which temperature is controlled using PWM. As the central control of all devices designed to use a microcontroller ATmega8535. Also designed system equipped with an LM35 temperature sensor type that is used to detect any temperature changes that occur in the heater and the results will be displayed to the LCD. PWM is a method to generate repetitive output signal periods between the high and low. The signal is then controlled width in accordance with previously entered temperature value from the keypad. Observations show that the design of the PWM generator is functioning properly to control the temperature of the water heater
BAB 3 PERANCANGAN ALAT
3.1 Diagram Blok Rangkaian 30 3.2 Rangkaian Power Supply 31 3.3 Rangkaian Mikrokontroler ATMEGA8535 33 3.4 Rangkaian Sensor Suhu 34 3.5 Rangkaian LCD (Liquid Crystal Display) 35 3.6 Rangkaian Mikrokontroler ATMEGA8 36
3.7 Rangkaian Converter 37
3.8 Rangkaian Keypad 39
3.9 Model Wadah 40
3.10 Flowchart (Diagram Alir Program) 41 3.11 Rangkaian Lengkap Sistem 43
BAB 4 HASIL DAN ANALISIS
4.2 Analisis Pengujian 54
DAFTAR TABEL
Halaman
Tabel 2.1 Fungsi Pin-pin Port B 21 Tabel 2.2 Fungsi Pin-pin Port D 22
Tabel 2.3 Kalor Jenis Zat 29
Tabel 4.1 Hasil Pengujian LCD dan LM35 47 Tabel 4.2 Data Pengukuran Temperatur Terhadap Waktu Dengan
Duty cycle 100 % 54
Tabel 4.3 Data Pengukuran Temperatur Terhadap Waktu Dengan
Duty cycle 75 % 54
Tabel 4.4 Data Pengukuran Temperatur Terhadap Waktu Dengan
Duty cycle 50 % 55
Tabel 4.5 Data Pengukuran Temperatur Terhadap Waktu Dengan
Duty cycle 25 % 55
Tabel 4.6 Data Perhitungan Jumlah Gelombang dan Energi Kalor
DAFTAR GAMBAR
Gambar 2.5 Proses pembandingan antara sinyal pembawa dengan sinyal referensi 11 Gambar 2.6 Bentuk fisik LM 35 13 Gambar 2.7 Arsitektur Atmega 8535 17 Gambar 2.8 Memori AVR Atmega 8535 18 Gambar 2.9 Status Register 19 Gambar 2.10 Konfigurasi Pin Mikrokontroler ATmega 8535 20 Gambar 2.11 Tampilan CodeVision AVR 24 Gambar 2.12 Tampilan Ponyprog2000 25 Gambar 2.13 Konfigurasi Pin Mikrokontroler Atmega 8 25 Gambar 3.1 Diagram Blok Rangkaian 30 Gambar 3.2 Rangkaian Skematik Power Supply 31 Gambar 3.3 Rangkaian Mikrontroler Atmega 8535 33 Gambar 3.4 Rangkain Sensor Suhu 34 Gambar 3.5 Rangkaian LCD (Liquid Crystal Display) 35 Gambar 3.6 Rangkaian Mikrokontroler ATMEGA8 36 Gambar 3.7 Rangkain Converter 37 Gambar 3.8 Bentuk Gelombang Tegangan Keluaran 39
Gambar 3.9 Rangkaian Keypad 40
Gambar 3.10 Model Wadah 41
ABSTRAK
Aplikasi Pembangkit PWM Pada Mikrokontroler ATmega 8535 Untuk Mengendalikan Suhu Pemanas Air (Heater)
Telah dilakukan perancangan sebuah pemanas air (heater) yang suhunya dikendalikan dengan menggunakan PWM. Sebagai pusat pengendalian dari seluruh alat yang dirancang digunakan mikrokontroler ATmega8535. Selain itu sistem yang dirancang dilengkapi dengan sebuah sensor suhu jenis LM35 yang digunakan untuk mendeteksi setiap perubahan temperatur yang terjadi pada heater yang hasilnya akan ditampilkan ke LCD. PWM merupakan sebuah metode untuk membangkitkan sinyal keluaran yang periodenya berulang antara high dan low . Sinyal tersebut kemudian dikontrol lebarnya sesuai dengan nilai temperatur yang diinputkan sebelumnya dari keypad. Hasil pengamatan menunjukan bahwa rancangan pembangkit PWM telah berfungsi dengan baik untuk mengontrol suhu pemanas air
ABSTRACT
Application Generator PWM On Microcontroller ATmega 8535 For Water Heater Temperature Control (Heater)
Having done design a water heater (heater) which temperature is controlled using PWM. As the central control of all devices designed to use a microcontroller ATmega8535. Also designed system equipped with an LM35 temperature sensor type that is used to detect any temperature changes that occur in the heater and the results will be displayed to the LCD. PWM is a method to generate repetitive output signal periods between the high and low. The signal is then controlled width in accordance with previously entered temperature value from the keypad. Observations show that the design of the PWM generator is functioning properly to control the temperature of the water heater
BAB I
PENDAHULUAN
1.1 Latar Belakang
Pemanfaatan komponen elektronika daya dalam proses konversi energi energi listrik semakin berkembang dari tahun ke tahun. Untuk pengendalian daya dari satu bentuk ke bentuk yang lain menjadi sangat penting, dan karakteristik dari peralatan-peralatan elektronika daya telah memungkinkan hal tersebut. Selain bentuknya kompak dan relatip tidak memerlukan tempat yang luas, peralatan elektronika daya ini juga memiliki wilayah pengaturan yang begitu luas, sehingga banyak yang digunakan sebagai konverter yang digunakan untuk memperoleh tegangan ac variabel dari tegangan sumber dc yang dikenal dengan inverter.
Pada aplikasi-aplikasi industri inverter digunakan secara luas, namun dalam hal ini penulis hanya memb atasi pada pemanas air (heater). Sering terjadi pada penggunaan komponen elektronika daya didalam suatu sistem tenaga listrik menimbukan masalah baru yaitu gangguan harmonisa (Harmonisa adalah suatu gangguan yang terjadi dikarenakan pengoperasian beban non linear yang akhirnya membentuk gelombang frekuensi tinggi yang merupakan kelipatan dari frekuensi fundamentalnya. Gelombang frekuensi tinggi ini menumpang pada gelomabng aslinya yang merupakn penjumlahan antara gelombang murni sesaat dengan gelombang harmoniknya sehingga terbentukalah gelombang cacat). Tapi dengan adanya PWM hal itu sudah bisa dikurangi.
memiliki PWM tetapi yang digunakan dalam penelitian ini adalah jenis mikrokontroler ATMega 8535 karena selain memiliki memori yang cukup besar jenis mikrokontroler ini adalah jenis terbaru dan sangat cocok untuk penelitian ini.
Disini juga mikrokontroler sebagai pusat pengolah data secara sederhana namun memenuhi tujuannya sebagai sistem yang memiliki kecerdasan buatan. Mikrokontroler AVR sudah menggunakan arsitektur Harvard dimana antara kode program dan data disimpan dalam memori secara terpisah. Sehingga dengan arsitektur seperti ini memori program mikrokontroler menjadi lebih terlindungi dari spike tegangan (denyutan yang terjadi pada tegangan listrik) dan faktor lingkungan lain yang merusak program.
Mikrokontroler AVR juga didesain memiliki efisiensi eksekusi yang baik untuk kode program hasil compailer C, maksudnya kode program yang dituliskan dalam bahasa C setelah dikompile akan menghasilkan file dengan ukuran yang tidak jauh berbeda dengan kode program yang dituliskan menggunakan assembler. Umumnya mikrokontroler keluarga AVR memiliki kecepatan clock dari 0 – 16 MHz, tetapi ada beberapa yang bisa sampai dengan clock 20 MHz. Salah satu seri mikrokontroler AVR yang banyak menjadi andalan saat ini untuk sistem yang kompleks adalah seri ATMega8535.
1.2 Tujuan
Adapun maksud dan tujuan penulis melakukan penelitian ini adalah :
1. Memanfaatkan mikrokontroler ATmega 8535 dalam mengendalikan suhu heater.
1.3 Manfaat Penelitian
Adapun manfaat yang diharapkan dari penelitian ini adalah:
1. Sebagai aplikasi lebih lanjut mikrokontroler, khususnya mikrokontroler ATMega 8535 dalam membangun sebuah alat yang mampu mengendalikan suhu heater.
2. Sebagai informasi bagaimana dasar membangun sebuah instrument yang mampu mengendalikan suhu heater sesuai dengan yang kita inginkan ( 290C sampai 420C).
1.4 Pembatasan Masalah
Adaun batasan dari permasalahan yang akan dibahas dalam penelitian ini adalah:
1. Menggunakan arsitektur mikrokontroler ATMega8535
2. Menggunakan sensor suhu LM35 untuk mendeteksi setiap perubahan suhu yang terjadi
3. Heater yang dirancang dalam penelitian ini hanya mempertahankan suhu diinginkan (290C sampai 420C).
1.5 Sistematika Penulisan
Untuk mempermudah pembahasan dan pemahaman maka penulis membuat sistematika
pembahasan bagaimana sebenarnya prinsip kerja dari alat pengendali suhu heater yang
berbasis mikrokontroler ATMega 8535, dengan sistematika penulisan sebagai berikut :
BAB I PENDAHULUAN
BAB II LANDASAN TEORI
Dalam bab ini dijelaskan tentang teori pendukung yang digunakan untuk pembahasan. Teori pendukung itu antara lain tentang PWM (modulasi lebar pulsa), sensor suhu LM35, mikrokontroller ATMega 8535 (hardware dan software).
BAB III PERANCANGAN ALAT
Pada bagian ini akan dibahas perancangan dari alat, yaitu diagram blok dari
rangkaian, skematik dan sistem kerja dari masing-masing rangkaian.
BAB IV HASIL DAN ANALISIS
Bab ini berisikan pengujian alat dan analisis tugas akhir yang telah dibuat.
BAB V KESIMPULAN DAN SARAN
BAB II
LANDASAN TEORI
2.1 PWM ( Pulse Width Modulation )
PWM merupakan sebuah mekanisma untuk membangkitkan sinyal keluaran yang periodenya berulang antara high dan low dimana kita dapat mengontrol durasi sinyal high dan low sesuai dengan yang kita inginkan. Duty cycle merupakan prosentase periode sinyal high dan periode sinyal, prosentase duty cycle akan bebanding lurus dengan tegangan rata-rata yang dihasilkan. Berikut ilustrasi sinyal PWM, misalkan kondisi high 5 V dan kondisi low 0 V.
Pengaturan lebar pulsa modulasi atau PWM merupakan salah satu teknik yang “ampuh” yang digunakan dalam sistem kendali (control system) saat ini. Pengaturan lebar modulasi dipergunakan di berbagai bidang yang sangat luas, salah satu diantaranya adalah: speed control (kendali kecepatan), power control (kendali sistem tenaga), measurement and communication (pengukuran atau instrumentasi dan
telekomunikasi).
2.1.1 Prinsip Dasar PWM
Gambar 2.1 Bentuk gelombang kotak (pulsa) dengan kondisi high 5V dan low 0V
Ton adalah waktu dimana tegangan keluaran berada pada posisi tinggi (baca: high atau 1) dan, Toff adalah waktu dimana tegangan keluaran berada pada posisi rendah (baca: low atau 0).
Anggap Ttotal adalah waktu satu siklus atau penjumlahan antara Ton dengan Toff , biasa dikenal dengan istilah “periode satu gelombang”.
Ttotal = Ton + Toff ………. (2.1)
Siklus kerja atau duty cycle sebuah gelombang di definisikan sebagai,
………... (2.2) Tegangan keluaran dapat bervariasi dengan duty-cycle dan dapat dirumusan sebagai berikut,
sehingga : ... (2.3)
Dari rumus diatas dapat ditarik kesimpulan bahwa tegangan keluaran dapat diubah-ubah secara langsung dengan mengdiubah-ubah nilai Ton.
Apabila Ton adalah 0, Vout juga akan 0.
puncak dan saat off mrnjadi nol (0) volt. Jika frekuensi switching cukup tinggi maka temperatur (suhu) air yang dikendalikan akan semakin sesuai dengan yang diharapkan. Dengan mengatur duty cycle dari sinyal (modulasi lebar pulsa dari sinyal disebabkan oleh PWM). Terlihat pada gambar di bawah sinyal ref adalah sinyal tegangan dc yang dikonversi oleh sinyal gergaji dan menghasilkan sinyal kotak
Gambar 2.2 Sinyal Referensi ( sinyal tegangan DC)
Informasi analog dapat dikirimkan dengan menggunakan pulsa-pulsa tegangan atau pulsa arus. Dengan modulasi pulsa, pembawa informasi terdiri dari pulsa-pulsa persegi yang berulang- ulang. Salah satu teknik modulasi yang sering digunakan adalah teknik modulasi durasi atu lebar dari waktu tunda positif ataupun waktu tunda negatif pulsa-pulsa persegi tersebut. Untuk membangkitkan sinyal PWM adalah dengan menggunakan fungsi timer/counter yang dibandingkan nilainya dengan sebuah register tertentu.
2.1.2 PWM mode phase correct
Gambar 2.3 PWM mode phase correct
Pada PWM 8 bit maka frekuensi dan duty cycle pada mode phase coreect dirumuskan
……… (2.4)
... (2.5)
dengan;
fPWM = frekuensi PWM
fOSC = frekuensi osilator
N = Skala clock
2.1.3 PWM mode fast
Pada mode fast hampir sama dengan phase correct hanya register TCNTx mencacah naik tanpa mencacah turun seperti gambar berikut.
Gambar 2.4 PWM mode fast
Pada PWM 8 bit maka frekuensi dan duty cycle dirumuskan sebagai berikut:
……….(2.6)
...(2.7)
dengan;
fPWM = frekuensi PWM
fOSC = frekuensi osilator
N = Skala clock
PWM Sinusoida satu fase menghasilkan pulsa PWM bolak balik satu fase dengan nilai tegangan bolak balik efektifnya dirumuskan sebagai berikut:
dt
dengan Vrms = tegangan efektif
v = fungsi tegangan
T = perioda
Oleh karena pada inverter SPWM nilai tegangan masukan DC adalah konstan maka tegangan rms dapat juga dirumuskan :
T t Vdc
Vrms=
∑
p ……….(2.9)dengan Vrms = tegangan efektif
VDC = tegangan searah inverter
tp = lebar pulsa tinggi dalam 1 periode
T = perioda
π
2
π
Gambar 2.5 (a) Proses pembandingan antara sinyal pembawa dengan sinyal referensi, (b) Sinyal penggerak VAN, (c) Sinyal penggerak VBN, (d) Sinyal SPWM
Proses pembangkitan SPWM secara digital dapat dilakukan dengan 2 cara, yaitu:
2. Dengan mencari terlebih dahulu waktu untuk setiap pulsa masing- masing sinyal penggerak, untuk dijadikan data dalam proses pembangkitan sinyal penggerak secara look up table.
2.2 SENSOR
2.2.1 Pengertian Umum Sensor
Secara umum sensor didefenisikan sebagai alat yang mampu menangkap fenomena fisika atau kimia kemudian mengubahnya menjadi sinyal listrik baik arus listrik ataupun tegangan. Fenomena fisik yang mampu menstimulus sensor untuk menghasilkan sinyal elektrik meliputi temperature, tekanan, gaya, medan magnet cahaya, pergerakan dan sebagainya.
Secara garis besar sensor dapat dibagi menjadi 2 bagian, yaitu : a) Sensor kimia
b) Sensor fisika
Sensor fisika adalah alat yang mampu mendeteksi besar (nilai) suatu besaran berdasarkan hukum- hukum fisika. Ada beberapa jenis sensor fisika yang kita kenal seperti sensor suhu, sensor cahaya, sensor gerak dan lain- lain.
Sensor suhu adalah alat yang digunakan untuk merubah besaran panas menjadi besaran listrik yang dapat dengan mudah dianalisis besarnya.
Karakteristik sensor suhu ditentukan dari sejauh mana sensor tersebut memiliki kemampuan yang baik dalam mendeteksi setiap perubahan suhu yang ingin dideteksinya. Kemampuan mendeteksi perubahan suhu meliputi:
2. Waktu respon dan waktu recovery, yaitu waktu yang dibutuhkan sensor untuk memberikan respon terhadap suhu yang dideteksinya. Semakin cepat waktu respon dan waktu recovery maka semakin baik sensor tersebut.
3. Stabilitas dan daya tahan, yaitu sejauh mana sensor dapat secara konsisten memberikan besar sensitifitas yang sama terhadap suhu , serta seberapa lama sensor tersebut dapat terus digunakan.
2.2.2 Sensor Suhu (LM 35)
LM 35 ialah sensor temperatur paling banyak digunakan untuk praktek, karena
selain eksternal yang menyediakan akurasi ±¼°C pada temperatur ruangan dan
harganya cukup murah, linearitasnya lumayan bagus. LM35 tidak membutuhkan
kalibrasi kisaran -55 to +150°C. LM35 dimaksudkan untuk beroperasi pada -55°
hingga +150°C
Gambar 2.6 Bentuk Fisik LM 35
2.2.3 Prinsip Kerja Sensor LM 35
Mula- mula vcc sebesar 12v digunakan untuk menghidupkan sensor LM35 yang akan mendeteksi suhu. Keluaran sensor ini akan naik sebesar 10 mV setiap derajad celcius sehingga diperoleh persamaan sebagai berikut :
VLM35 = Suhu*10mV ………. (2.10)
Secara prinsip sensor akan me lakukan penginderaan pada saat perubahan suhu setiap suhu 1 ºC akan menunjukan tegangan sebesar 10 mV. Pada penempatannya LM35 dapat ditempelkan dengan perekat atau dapat pula disemen pada permukaan akan tetapi suhunya akan sedikit berkurang sekitar 0,01 ºC karena terserap pada suhu permukaan tersebut. Dengan cara seperti ini diharapkan selisih antara suhu udara dan suhu permukaan dapat dideteksi oleh sensor LM35 sama dengan suhu disekitarnya, jika suhu udara disekitarnya jauh lebih tinggi atau jauh lebih rendah dari suhu permukaan, maka LM35 berada pada suhu permukaan dan suhu udara disekitarnya .
Untuk lebih meningkatkan keakurasian dan kepresisian pengukur suhu, maka perlu dilakukan pengesetan yang optimal pada tegangan referensi ADC yang digunakan sehingga jika menggunakan ADC 8-bit misalnya, maka jangkauan 0-255 haruslah merepresentasikan nilai minimum dan maksimum suhu yang dapat diukur oleh rangkaian sensor suhu. Jangan sampai memberikan tegangan referensi yang salah pada rangkaian ADC, sehingga jangkauan ADC melebihi atau kurang dari jangkauan tegangan masukannya.
2.2.4 Karakteristik Sensor
Berikut ini adalah karakteristik dari sensor suhu LM35.
§ Memiliki sensitivitas suhu, dengan faktor skala linier antara tegangan dan suhu
10 mVolt/ºC, sehingga dapat dikalibrasi langsung dalam celcius.
§ Bekerja pada tegangan 4 sampai 30 volt. § Memiliki arus rendah yaitu kurang dari 60 µA.
§ Memiliki pemanasan sendiri yang rendah (low- heating) yaitu kurang dari 0,1
ºC pada udara diam.
§ Memiliki impedansi keluaran yang rendah yaitu 0,1 W untuk beban 1 mA. § Memiliki ketidaklinieran hanya sekitar ± ¼ ºC.
2.3 Mikrokontroler AVR ATMega8535
Tidak seperti sistem komputer, yang mampu menangani berbagai macam program aplikasi (misalnya pengolah kata, pengolah angka dan lain sebagainya), mikrokontroler hanya bisa digunakan untuk satu aplikasi tertentu saja. Perbedaan lainnya terletak pada perbandingan RAM-nya dan ROM. Read Only Memory (ROM), berfungsi untuk menyimpan berbagai program yang berasal dari pabrik komputer. Sesuai dengan na manya, ROM (Read Only Memory), maka program yang tersimpan didalam ROM, hanya bisa dibaca oleh parapemakai. Random Access Memory (RAM), merupakan bagian memory yang bisa digunakan oleh para pemakai untuk menyimpan program dan data.
Pada sistem komputer perbandingan RAM dan ROM-nya besar, artinya program-program pengguna disimpan dalam ruang RAM yang relatif besar, sedangkan rutin-rutin antarmuka perangkat keras disimpan dalam ruang ROM yang kecil. Sedangkan pada mikrokontroler, perbandingan ROM dan RAM-nya yang besar artinya program kontrol disimpan dalam ROM (bisa Masked ROM atau Flash PEROM) yang ukurannya relatif lebih besar, sedangkan RAM digunakan sebaga i tem pat penyimpanan sementara, termasuk register-register yang digunakan pada mikro-kontroler yang bersangkutan.
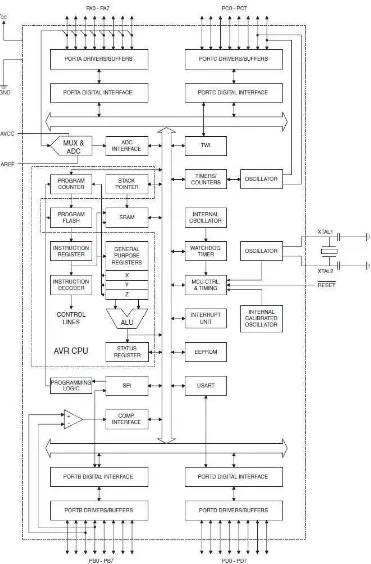
2.3.1 Arsitektur Mikrokontroler AVR ATMEGA8535
AVR termasuk kedalam jenis mikrokontroler RISC (Reduced Instruction Set Computing) 8 bit. Berbeda dengan mikrokontroler keluarga MCS-51 yang
dengan teknologi RISC semua instruksi dikemas dalam kode 16 bit (16 bits words) dan sebagian besar instruksi dieksekusi dalam 1 clock, sedangkan pada teknologi CISC seperti yang diterapkan pada mikrokontroler MCS-51, untuk menjalankan sebuah instruksi dibutuhkan waktu sebanyak 12 siklus clock.
Secara garis besar, arsitektur mikrokontroler ATMEGA8535 terdiri dari :
1. 32 saluran I/O (Port A, Port B, Port C dan Port D) 2. 10 bit 8 Channel ADC (Analog to Digital Converter) 3. 4 Channel PWM
4. 6 Sleep Modes : Idle, ADC Noise Reduction, Power-save, Power-Down, Standby and Extended Standby
5. 3 buah timer/counter. 6. Analog Compararator
7. Watchdog timer dengan osilator internal 8. 512 byte SRAM
9. 512 byte EEPROM
10.8 kb Flash memory dengan kwmampuan Read While Write 11.Unit interupsi (internal dan external)
12.Port antarmuka SPI8535 “memory map”
2.3.2 Peta Memory ATMega8535
ATMega8535 memiliki ruang pengalamatan memori data dan memori
program yang terpisah. Memori data terbagi menjadi 3 bagian yaitu : 32 buah register umum, 64 buah register I/O, dan 512 byte SRAM internal.
Register untuk keperluan umum menempati space data pada alamat terbawah yaitu $00 sampai $1F. Sementara itu register khusus untuk menangani I/O dan kontrol terhadap mikrokontroler menempati 64 alamat berikutnya, yaitu mulai dari $20 sampai $5F. Register tersebut merupakan register yang khusus digunakan untuk mengatur fungsi terhadap berbagai peripheral mikrokontroler, seperti kontrol register, timer/counter, fungsi fungsi I/O, dan sebagainya. Register khusus alamat memori secara lengkap dapat dilihat pada tabel dibawah . Alamat memori berikutnya digunakan untuk SRAM 512 byte, yaitu pada lokasi $60 sampai dengan $25F.
Gambar 2.8 Memori AVR ATMega8535
2.3.3 Status Register
Status register adalah register berisi status yang dihasilkan pada setiap operasi yang dilakukan ketika suatu instruksi dieksekusi. SREG merupakan bagian dari inti CPU mikrokontroler.
Gambar 2.9 Status Register
Status Register ATMega8535
1. Bit7 --> I (Global Interrupt Enable), Bit harus di Set untuk mengenable semua jenis interupsi.
2. Bit6 --> T (Bit Copy Storage), Instruksi BLD dan BST menggunakan bit T sebagai sumber atau tujuan dalam operasi bit. Suatu bit dalam sebuah register GPR dapat disalin ke bit T menggunakan instruksi BST, dan sebaliknya bit T dapat disalin kembali kesuatu bit dalam register GPR dengan menggunakan instruksi BLD.
3. Bi5 --> H (Half Cary Flag)
4. Bit4 --> S (Sign Bit) merupakan hasil operasi EOR antara flag -N (negatif) dan flag V (komp lemen dua overflow).
5. Bit3 --> V (Two's Component Overflow Flag) Bit ini berfungsi untuk mendukung operasi matematis.
6. Bit2 --> N (Negative Flag) Flag N akan menjadi Set, jika suatu operasi matematis menghasilkan bilangan negatif.
7. Bit1 --> Z (Zero Flag) Bit ini akan menjadi Set apabila hasil operasi matematis menghasilkan bilangan 0.
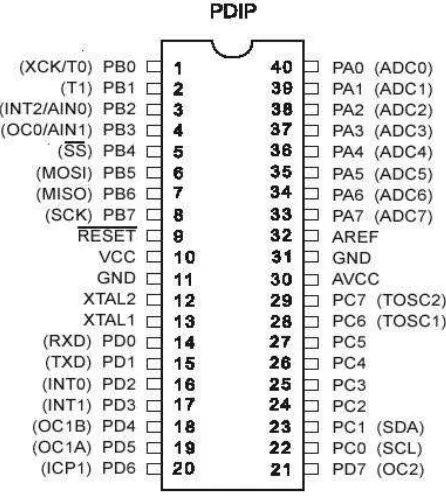
2.3.4 Konfigurasi Pin Mikrokontroler AVR ATMEGA8535
Mikrokontroler ATMega8535 memiliki 40 pin untuk model PDIP, dan 44 pin untuk model TQFP dan PLCC. Nama-nama pin pada mikrokontroler ini adalah :
1. VCC : merupakan pin yang berfungsi sebagai pin masukan catu daya 2. GND : merupakan pin ground.
3. Port A (PA0...PA7) : merupakan pin I/O dan pin masukan ADC
4. Port B (PB0 – PB7) : merupakan akan pin I/O dua arah dan pin fungsi khusus, yaitu sebagai Timer/Counter, komperator analog dan SPI.
5. Port C (PC0 – PC7) : merupakan pin I/O dua arah dan pin fungsi khusus, yaitu TWI, komperator analog, input ADC dan Timer Osilator.
6. Port D (PD0 – PD7) : merupakan pin I/O dua arah dan pin fungsi khusus, yaitu komperator analog, interupsi eksternal dan komunikasi serial.
7. RESET : merupakan pin yang digunakan untuk mereset mikrokontroler. 8. XTAL1 dan XTAL2 : merupakan pin masukan clock eksternal.
9. AVCC : merupakan pin masukan tegangan untuk ADC. 10.AREF : merupakan pin tegangan referensi ADC
Deskripsi pin-pin pada mikrokontroler ATMega8535 : 1. Port A
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan internal pull- up resistor (dapat diatur per bit). Output buffer Port A dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port A (DDRA) harus disetting terlebih dahulu sebelum Port A digunakan. Bit-bit DDRA diisi 0 jika ingin memfungsikan pin-pin port A yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, kedelapan pin port A juga digunakan untuk masukan sinyal analog bagi A/D converter.
2. Port B
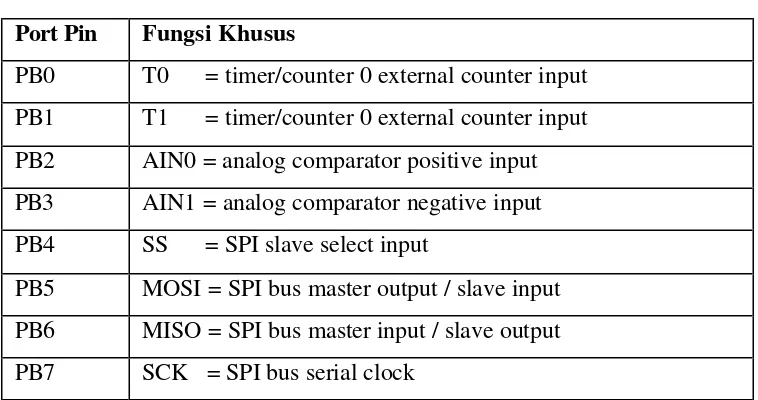
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan internal pull- up resistor (dapat diatur per bit). Output buffer Port B dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port B (DDRB) harus disetting terlebih dahulu sebelum Port B digunakan. Bit-bit DDRB diisi 0 jika ingin memfungsikan pin-pin port B yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Pin-pin port B juga memiliki untuk fungsi- fungsi alternatif khusus seperti yang dapat dilihat dalam tabel berikut.
Tabel 2.1 Fungsi Pin-pin Port B Port Pin Fungsi Khusus
PB0 T0 = timer/counter 0 external counter input PB1 T1 = timer/counter 0 external counter input PB2 AIN0 = analog comparator positive input PB3 AIN1 = analog comparator negative input PB4 SS = SPI slave select input
3. Port C
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer Port C dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port C (DDRC) harus disetting terlebih dahulu sebelum Port C digunakan. Bit-bit DDRC diisi 0 jika ingin memfungsikan pin-pin port C yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, dua pin port C (PC6 dan PC7) juga memiliki fungsi alternatif sebagai oscillator untuk timer/counter 2.
4. Port D
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer Port D dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port D (DDRD) harus disetting terlebih dahulu sebelum Port D digunakan. Bit-bit DDRD diisi 0 jika ingin memfungsikan pin-pin port D yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin port D juga memiliki untuk fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam tabel berikut.
Tabel 2.2 Fungsi Pin-pin Port D Port Pin Fungsi Khusus
PD0 RDX (UART input line) PD1 TDX (UART output line)
PD2 INT0 ( external interrupt 0 input ) PD3 INT1 ( external interrupt 1 input )
PD4 OC1B (Timer/Counter1 output compareB match output) PD5 OC1A (Timer/Counter1 output compareA match output) PD6 ICP (Timer/Counter1 input capture pin)
5. RESET
RST pada pin 9 merupakan reset dari AVR. Jika pada pin ini diberi masukan low selama minimal 2 machine cycle maka system akan di-reset.
6. XTAL1
XTAL1 adalah masukan ke inverting oscillator amplifier dan input ke internal clock operating circuit.
7. XTAL2
XTAL2 adalah output dari inverting oscillator amplifier.
8. AVcc
Avcc adalah kaki masukan tegangan bagi A/D Converter. Kaki ini harus secara eksternal terhubung ke Vcc melalui lowpass filter.
9. AREF
AREF adalah kaki masukan referensi bagi A/D Converter. Untuk operasionalisasi ADC, suatu level tegangan antara AGND dan Avcc harus dibeikan ke kaki ini.
10. AGND
AGND adalah kaki untuk analog ground. Hubungkan kaki ini ke GND, kecuali jika board memiliki anlaog ground yang terpisah.
2.4 Bahasa Pemrogra man ATM ega8535
Pemrograman mikrokontroler ATMega8535 dapat menggunakan low level language (assembly) dan high level language (C, Basic, Pascal, JAVA, dll) tergantung
Untuk pembuatan suatu proyek yang besar akan memakan waktu yang lama serta penulisan programnya akan panjang. Sedangkan bahasa C memiliki keunggulan dibanding bahasa assembler yaitu independent terhadap hardware serta lebih mudah untuk menangani project yang besar.
Bahasa C memiliki keuntungan-keuntungan yang dimiliki bahasa assembler
(bahasa mesin), hampir semua operasi yang dapat dilakukan oleh bahasa mesin, dapat dilakukan dengan bahasa C dengan penyusunan program yang lebih sederhana dan mudah. Bahasa C terletak diantara bahasa pemrograman tingkat tinggi dan assembly .
2.5 Software ATMega8535 Editor dan Simulator
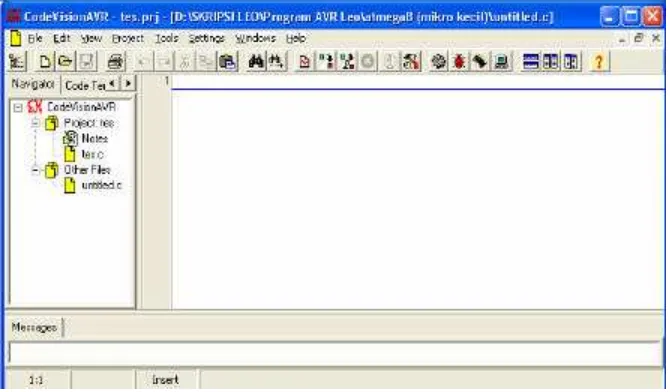
2.5.1 Software ATMega8535 Editor
Instruksi- instruksi yang merupakan bahasa C tersebut dituliskan pada sebuah editor, yaitu CodeVision AVR. CodeVision AVR merupakan salah satu software kompiler yang khusus digunakan untuk mikrokontroler keluarga AVR. Meskipun CodeVision
AVR termasuk software komersial, namun kita tetap dapat menggunakannya dengan mudah karena terdapat versi evaluasi yang disediakan secara gratis walaupun dengan kemampuan yang dibatasi.
Tampilan CodeVision AVR seperti dibawah ini:
2.5.2 Software Downloader
Melakukan download program ke mikrokontroler dapat menggunakan ponyprog2000.
Gambar 2.12 Tampilan Ponyprog2000 2.6 Mikrokontroler ATmega 8
Mikrokontroler ATMega8 yang merupakan bagian dari keluarga mikrokontroler CMOS 8-bit buatan Atmel. AVR mempunyai 32 register general-purpose, timer/counter fleksibel dengan mode compare, interrup t internal dan eksternal, serial UART, programmable Watchdog Timer, dan mode powersaving.
Beberapa dari mikrokontroler atmel AVR mempunyai ADC internal dan PWM internal. AVR juga mempunyai In-Sistem Programmable Flash on-chip yang mengijinkan memori program untuk diprogram berulang-ulang dalam sistem menggunakan hubungan serial SPI.
2.6.1 Konfigurasi Pin Mikrokontroler AVR ATMEGA8535 • VCC
Suplai tegangan digital. Besarnya tegangan berkisar antara 4,5 – 5,5V untuk ATmega8 dan 2,7 – 5,5V untuk ATmega8L.
• GND
Ground. Referensi nol suplai tegangan digital.
• (PB7..PB0)
PORTB adalah port I/O dua-arah (bidirectional) 8-bit dengan resistor pull- up internal yang dapat dipilih. Buffer keluaran port ini memiliki karakteristik yang simetrik ketika digunakan sebagai source ataupun sink. Ketika digunakan sebagai input, pin yang di pull- low secara eksternal akan memancarkan arus jika resistor pull- up- nya diaktifkan. Pin-pin PORTB akan berada pada kondisi tri-state ketika RESET aktif, meskipun clock tidak running.
• PORTC(PC5..PC0)
PORTC adalah port I/O dua-arah (bidirectional) 7-bit dengan resistor pull- up internal yang dapat dipilih. Buffer keluaran port ini memiliki karakteristik yang simetrik ketika digunakan sebagai source ataupun sink. Ketika digunakan sebagai input, pin yang di pull- low secara eksternal akan memancarkan arus jika resistor pull- up- nya diaktifkan. Pin-pin PORTC akan berada pada kondisi tri-state ketika RESET aktif, meskipun clock tidak running.
• PC6/RESET
• PORTD (PD7..PD0)
PORTD adalah port I/O dua-arah (bidirectional) 8-bit dengan resistor pull- up internal yang dapat dipilih. Buffer keluaran port ini memiliki karakteristik yang simetrik ketika digunakan sebagai source ataupun sink. Ketika digunakan sebagai input, pin yang di pull- low secara eksternal akan memancarkan arus jika resistor pull- up-nya diaktifkan. Pin-pin PORTD akan berada pada kondisi tri-state ketika RESET aktif, meskipun clock tidak running.
• RESET
Pin masukan Reset. Sinyal LOW pada pin ini dengan lebar minimum 1,5 mikrodetik akan membawa mikrokontroler ke kondisi Reset, meskipun clock tidak running. Sinyal dengan lebar kurang dari 1,5 mikrodetik tidak menjamin terjadinya kondisi Reset.
• AVCC
AVCC adalah pin suplai tegangan untuk ADC, PC3..PC0, dan ADC7..ADC6. Pin ini harus dihubungkan dengan VCC, meskipun ADC tidak digunakan. Jika ADC digunakan, VCC harus dihubungkan ke AVCC melalui low-pass filter untuk mengurangi noise.
• AREF
Pin Analog Reference untuk ADC.
• ADC7..ADC6
Analog input ADC. Hanya ada pada ATmega8 dengan package TQFP dan QFP/MLF.
Kelebihan dari ATMega8 adalah sebagai berikut :
• Mempunyai performa yang tinggi (berkecepatan akses maksimum 16MHz) dan hemat daya
• Memori untuk program flash cukup besar yaitu 8K Byte
• Memori internal SRAM sebesar 1K Byte
• Port komunikasi SPI
• Komunikasi serial standar USART
• Tersedia 3 chanel timer/counter (2 untuk 8 bits dan 1 untuk 16 bits)
2.7 Kalor
Kalor adalah energi yang dipindahkan akibat adanya perbedaan temperatur.. Satuan kalor adalah kalori, dimana 1 kalori adalah kalor yang diperlukan untuk menaikkan temperatur 1 gr air sebesar 1 0C
Dalam sistem British, 1 Btu (British Thermal Unit) adalah kalor untuk menaikkan temperatur 1 lb air dari 63 F menjadi 64 F.
1 kal = 4,186 J = 3,968 x 10-3 Btu 1 J = 0,2389 kal = 9,478 x 10-4 Btu 1 Btu = 1055 J = 252,0 kal
Energi kalor (Q) merupakan energi ya ng berpindah dari satu benda ke benda yang lain akibat adanya perbedaan suhu. Berkaitan dengan sistem dan lingkungan, bisa dikatakan bahwa kalor merupakan energi yang berpindah dari sistem ke lingkungan atau energi yang berpindah dari lingkungan ke sistem akibat adanya perbedaan suhu. Jika suhu sistem lebih tinggi dari suhu lingkungan, maka kalor akan mengalir dari sistem menuju lingkungan. Sebaliknya, jika suhu lingkungan lebih tinggi dari suhu sistem, maka kalor akan mengalir dari lingkungan menuju sistem.
Q = m c ∆T ………..(2.11)
termasuk zat- zat yang tidak disebut di dalam tabel. Ini berarti bahwa air memerlukan kalor lebih banyak daripada zat lain untuk massa dan kenaikan suhu yang sama. Air juga melepaskan kalor yang lebih besar dibandingkan dengan zat- zat lain jika suhunya diturunkan.
Tabel. 2.3 Kalor Jenis Zat
Zat Kalor jenis (x 102 J/kg K)
Zat Kalor jenis (x 102 J/kg K)
Air 41,8 Kuningan 3,76
Air laut 39,0 Raksa 1,40 Aluminium 9,03 Seng 3,88 Besi 4,50 Sporitus 2,40
Es 20,6 Tembaga 3,85
BAB III
PERANCANGAN ALAT
3.1 Diagram Blok Rangkaian
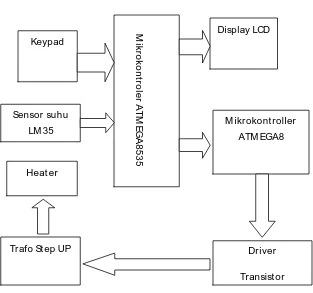
Diagram blok merupakan gambaran dasar dari rangkaian sistem yang akan dirancang. Setiap diagram blok mempunyai fungsi masing- masing. Adapun diagram blok dari sistem yang dirancang adalah seperti yang diperlihatkan pada gambar 3.1. berikut ini:
Gambar 3.1. Diagram Blok Rangkaian
Disain sistem rangkaian terdiri dari:
1. Keypad berfungsi untuk memasukkan nilai suhu yang diinginkan.
2. Sensor suhu berfungsi untuk mengukur temperatur air, pada penelitian ini digunakan sensor suhu LM35.
3. Output sensor suhu dihubungkan ke port ADC pada mikrokontroller, pada penelitian ini digunakan mikrokontroller ATMEGA8535, sehingga perubahan nilai pada sensor akan dikenali oleh mikrokontroller. Selanjutnya mikrokontroller akan menampilkan nilai hasil pengukuran pada display LCD. Mikrokontroller juga membaca input dari keypad dan menampilkannya pada LCD, selanjutnya mikrokontroller akan membandingkan nilai input dari keypad untuk menentukan besarnya daya yang akan dihasilkan oleh gelombang kotak.
4. Display LCD berfungsi untuk menampilkan nilai hasil pengukuran, yaitu nilai dari temperatur air.
5. Mikrokontroller ATMEGA8 berfungsi untuk membentuk gelombang kotak dengan frekuensi 50 HZ, dengan daya yang berbeda.
6. Trafo step up berfungsi untuk menaikkan tegangan dari 12 volt menjadi 220 volt. 7. Heater berfungsi sebagai pemanas air.
3.2 Rangkaian Power Supply
Rangkaian skematik power supply dapat dilihat pada gambar 3.2 di bawah ini:
Rangkaian power supply berfungsi untuk mensupplay arus dan tegangan ke seluruh rangkaian yang ada. Rangkaian power supply ini terdiri dari dua keluaran, yaitu 5 volt dan 12 volt, keluaran 5 volt digunakan untuk menghidupkan seluruh rangkaian kecuali rangkaian ADC, sedangkan keluaran 12 volt digunakan untuk mensupplay tegangan ke rangkaian ADC, karena rangkaian ADC memerlukan tegangan input sebesar 12 volt agar tegangan referensinya stabil.
3.3 Rangkaian Mikrokontroler ATMEGA8535
Rangkaian ini berfungsi sebagai pusat kendali dari seluruh sistem yang ada. Komponen utama dari rangkaian ini adalah IC mikrokontroler ATMEGA8535. Pada IC inilah semua program diisikan, sehingga rangkaian dapat berjalan sesuai dengan yang dikehendaki. Rangkaian mikrokontroler ditunjukkan pada gambar berikut ini:
Gambar 3.3 Rangkaian mikrokontroller ATMEGA8535
Pada pin 9 dihubungkan dengan sebuah kapasitor dan sebuah resis tor yang dihubungkan ke ground. Kedua komponen ini berfungsi agar program pada mikrokontroler dijalankan beberapa saat setelah power aktip. Lamanya waktu antara aktipnya power pada IC mikrokontroler dan aktipnya program adalah sebesar perkalian antara kapasitor dan resistor tersebut.
3.4 Rangkaian Sensor Suhu
Untuk mengetahui nilai temperatur yang akan diukur digunakan sensor LM 35 yang merupakan sensor temperatur. Sensor ini memiliki 1 keluaran, dimana tegangan keluaran akan berubah sesuai dengan perubahan temperature lingkungan.. Rangkaian sensor ditunjukkan oleh gambar dibawah ini:
Gambar 3.4 Rangkaian Sensor Suhu
3. 5 Rangkaian LCD (Liquid Crystal Display)
Rangkaian skematik konektor yang dihubungkan dari LCD (liquid crystal display) ke mikrokontroler dapat dilihat pada gambar dibawah ini
Gambar 3.5 Rangkaian Skematik Konektor yang dihubungkan dari LCD ke mikrokontroler
3.6. Rangkaian Mikrokontroler ATMEGA8
Rangkaian ini berfungsi sebagai pembentuk gelombang kotak 50 HZ. Rangkaian mikrokontroler ditunjukkan pada gambar berikut ini:
ke rangkain converter
ke mikrokontroler ATmega 8535
Gambar 3.6 Rangkaian Mikrokontroller ATMEGA8
Mikrokont roler ini memiliki 20 port I/O, yaitu port B, port C dan port D. Pin 14 sampai 19 adalah port B. Pin 23 sampai 28 adalah port C. Dan Pin 2 sampai 6 dan 11, 12 dan 13 adalah port D. Pin 7 dihubungkan ke sumber tegangan 5 volt. Dan pin 8 dihubungkan ke ground. Rangkaian mikrokontroler ini menggunakan komponen kristal sebagai sumber clocknya. Nilai kristal ini akan mempengaruhi kecepatan mikrokontroler dalam mengeksekusi suatu perintah tertentu.
3.7 Rangkaian Converter
Rangkaian ini berfungsi untuk mengubah tegangan DC menjadi tegangan AC. Rangakaian ini mendapatkan pulsa 50 Hz dari mikrokontroler. Rangkaian ini menggunakan transistor sebagai saklar. Rangkaian converter ditunjukkan pada gambar di bawah ini :
Gambar 3.7 Rangkaian Converter
Transistor yang digunakan pada rangkaian ini ada tiga jenis transistor, yaitu transistor C945. transistor ini merupakan transistor tipe NPN. Transistor ini langsung diaktipkan oleh mikrokontroler. Jika mikrokontroler diset high (1) maka transistor ini akan aktip. Namun jika mikrokontroler diset low (0), maka transistor ini tidak akan aktip. Transistor ini berfungsi untuk mentrigger transistor berikutnya.
Transistor yang lain yang digunakan dalam rangkaian ini adalah transistor TIP 127. Transistor ini adalah transistor tipe PNP. Transistor ini ditrigger oleh transistor C945. Transistor ini akan aktip jika mendapat tegangan kurang dari 11,3 volt dan jika diberi tegangan lebih dari 11,3 volt, maka transistor tipe PNP tidak akan aktip. Selajutnya adalah transistor TIP 122. transistor ini merupakan transistor tipe NPN. Transistor ini juga ditrigger oleh transistor sebelumnya yaitu transistor C945. Transistor ini akan aktif jika diberi tegangan lebih besar dari 0,7 volt, dan transistor ini tidak akan aktip jika pada basisnya diberi tegangan lebih kecil dari 0,7 volt.
Pada rangakain ini arus yang cukup besar dari baterei akan mengalir pada transistor TIP 122 dan TIP 127. Karena itu pada masing - masing transistor tersebut diberikan pendingin (headsink) agar tidak terlalu panas.
Rangkaian ini terdiri dari 2 masukan. Masukan pertama berfungsi untuk menghasilkan tegangan positip dengan frekuensi 50 Hz. Dan masukan lainnya berfungsi untuk menghasilkan tegangan negatip dengan frekuensi 50 Hz.
Ketika mikrokontroler diset high (1) transistror C945 akan aktif dan kolektor dihubungkan ke sumber tegangan 12 volt maka transistor C945 saturasi, dan TIP 127 dan TIP 122 akan off sehingga keluarannya adalah 12 volt. Secara bersamaan diset low (0) pada input rangkaian yang lain dan hasil akhirnya memberikan tegangan 0 volt. Proses ini terjadi secara bergantian (input rangkaian bagian atas diset high, bagian bawah diset low kemudian bagian atas diset low dan bagian bawah diset high) terus menerus. Sehingga akan menghasilkan bentuk gelombang tegangan keluaran yang menjadi input bagi trafo seperti gambar berikut.
Gambar 3.8 Bentuk Gelombang Tegangan Keluaran
3.8 Rangkaian Keypad
Gambar 3.9 Rangkaian Keypad
Rangkaian keypad yang digunakan adalah rangkaian keypad yang telah ada dipasaran. Keypad ini terdiri dari 12 tombol yang hubungan antara tombol-tombolnya seperti tampak pada gambar di atas. Rangkaian ini dihubungkan ke PORTB mikrokontroler ATMEGA8535.
3.9 Model Wadah
Wadah (tempat air) yang dirancang pada penelitian ini adalah berupa kotak, dengan ukuran, panjang : 10 cm, lebar : 6 cm dan tinggi : 11 cm yang bagian atasnya terbuka.Sehingga volume total wadah adalah 660 cm3 (atau 660 cc). Akan tetapi wadah tersebut tidak diisi penuh, wadah hanya diisi dengan tinggi sampai 8 cm saja. Maka volume air yang diisikan kedalam wadah dapat dihitung dengan rumus: volume = p x l x t. volume = 10 cm x 6 cm x 8 cm
volume = 480 cm3 = 480 mL
Gambar 3.10 Model Wadah
3.10 Flow Chart (Diagram Alir Program)
Flowchart pada mikrokontroler ATmega 8535
3.11 Rangkaian Lengkap
BAB IV
HASIL DAN ANALISIS
Pada bab ini, akan dibahas pengujian alat dan analisis pengujian.
4.1 Pengujian Alat
4.1.1 Pengujian Minimum Sistem
Pada pengujian minimum system ini dilakukan percobaan yang sifatnya sederhana tapi dapat menunjukkan bekerja tidaknya minimum system tersebut. Percobaan tersebut adalah menghidupkan beberapa buah LED secara bergantian. Percobaan ini dilakukan pada I/O port (Port A). Untuk menghidupkan LED tersebut digunakan program sebagai berikut:
while (1)
{
// Place your code here
PORTA=240
delay_ms(100);
PORTA=15
delay_ms(100);
};
Jika program tersebut dijalankan, maka LED akan hidup dan mati secara bergantian seperti yang ditunjukkan dalam tabel berikut:
LED 1 LED 2 LED 3 LED 4 LED 5 LED 6 LED 7 LED 8 Tahap 1 ON ON ON ON OFF OFF OFF OFF Tahap 2 OFF OFF OFF OFF ON ON ON ON
4.1.2 Pengujian LCD
Selain percobaan I/O port (Port A) juga dilakukan percobaan terhadap LCD. Pada tahap ini dilakukan percobaan untuk mengaktifkan LCD system. Pengaktifan LCD ini dilakukan dengan cara menampilkan beberapa karakter pada LCD.
Untuk menampilkan beberapa karakter tersebut digunakan listing program sebagai berikut:
4.1.3 Pengujian LCD dan LM35
Pengujian berikutnya, dengan cara menghubungkan LM35 ke PORDA.0 selanjutnya membaca nilainya dan ditampilkan k e LCD. Programnya sebagai berikut:
while (1)
{
// Place your code here
lcd_gotoxy(4,0);
lcd_putsf("MY PROJECT");
nilai=adc_data[0];
sprintf(suhu,"temperatur=%d C",nilai);
lcd_gotoxy(0,1);
lcd_puts(suhu);
delay_ms(30);
lcd_clear();
};
}
program di atasakan membaca nilai dari PORTA.0 yang dihubungkan ke LM35 dengan perintah nilai=adc_data[0];. Dengan perintah ini maka adc_data[0] akan dimasukkan kedalam sebuah variable bernama nilai, selanjutnya akan di ubah kedalam bentuk decimal dengan perintah sprintf(suhu,"temperatur=%d C",nilai);
perintah lcd_gotoxy(0,1); lcd_puts(suhu).
Pengujian selanjutnya dilakukan dengan menghubungkan rangkaian sensor temperature dan LCD ke mikrokontroller, selanjutnya mengukur suhu air dengan menggunakan thermometer, mengukur output LM 35 dan melihat tampilan pada LCD. Datanya sebagai berikut.
Tabel 4.1 Hasil Pengujian LCD dan LM35
Suhu teruk ur
Pengujian rangkaian tombol ini dapat dilakukan dengan menghubungkan rangkaian ini dengan mikrokontroler ATMEGA8535, kemudian memberikan program sederhana untuk mengetahui baik/tidaknya rangkaian ini. Rangkaian dihubungkan ke PORTB. Untuk Mengecek penekanan pada 3 tombol yang paling atas, maka PORTB.3 diberi logika 0 Dengan demikian maka PORTB.3 akan mendapat logika low (0), dan yang lainnya mendapat logika high (1), seperti berikut,
Jika terjadi penekanan pada Tbl 1, maka PORTB.3 akan terhubung ke PORTB.4 yang menyebabkan PORTB.4 juga akan mendapatkan logika low (0). Seperti berikut,
B.7 B.6 B.5 B.4 B.3 B.2 B.1 B.0 1 1 1 0 0 1 1 1
Data pada PORTB akan berubah menjadi 231. Data inilah sebagai indikasi adanya penekanan pada tombol 1.
Jika terjadi penekanan pada Tbl 2, maka PORTB.3 akan terhubung ke PORTB.0 yang menyebabkan PORTB.0 juga akan mendapatkan logika low (0). Seperti berikut,
B.7 B.6 B.5 B.4 B.3 B.2 B.1 B.0 1 1 1 1 0 1 1 0
Data pada PORTB akan berubah menjadi 246. Data inilah sebagai indikasi adanya penekanan pada tombol 2. Demikian seterusnya untuk tombol-tombil yang lain.
Program yang diisikan pada mikrokontroler ATMEGA8535 untuk menguji rangkaian keypad adalah sebagai berikut:
PORTB.3=0;
nilai1=PINB;
if (nilai1==231)
{nilai=1;}
if (nilai1==246)
if (nilai1==243)
{nilai=3;}
Program diatas akan menunggu penekanan pada tombol 1, tombol 2, dan tombol 3. Jika tombol 1 ditekan, maka nilai akan diisi dengan 1, jika tombol 2 ditekan, maka nilai akan diisi dengan 2 dan jika tombol 3 ditekan, maka nilai akan diisi dengan 3.
Untuk Mengecek penekanan pada 3 tombol yang di tengah, maka PORTB.5 diberi logika 0 Dengan demikian maka PORTB.5 akan mendapat logika lo w (0), dan yang lainnya mendapat logika high (1).
Jika terjadi penekanan pada Tbl 4, maka PORTB.5 akan terhubung ke PORTB.4 yang menyebabkan PORTB.4 juga akan mendapatkan logika low (0). Seperti berikut,
B.7 B.6 B.5 B.4 B.3 B.2 B.1 B.0 1 1 0 0 1 1 1 1
Data pada PORTB akan berubah menjadi 207. Data inilah sebagai indikasi adanya penekanan pada tombol 4.
Jika terjadi penekanan pada Tbl 5, maka PORTB.5 akan terhubung ke PORTB.0 yang menyebabkan PORTB.0 juga akan mendapatkan logika low (0). Seperti berikut,
B.7 B.6 B.5 B.4 B.3 B.2 B.1 B.0 1 1 0 1 1 1 1 0
Program yang diisikan pada mikrokontroler ATMEGA8535 untuk menguji rangkaian keypad adalah sebagai berikut:
PORTB.5=0;
nilai1=PINB;
if (nilai1==207)
{nilai=4;}
if (nilai1==222)
{nilai=5;}
if (nilai1==219)
{nilai=6;}
Program diatas akan menunggu penekanan pada tombol 4, tombol 5, dan tombol 6. Jika tombol 4 ditekan, maka nilai akan diisi dengan 4, jika tombol 5 ditekan, maka nilai akan diisi dengan 5 dan jika tombol 6 ditekan, maka nilai akan diisi dengan 6.
4.1.5 Pengujian Rangkaian pembentuk gelombang 50 Hz
Untuk membentuk gelombang 50 Hz, pada mikrokontroller diberi program sebagai berikut:
PORTC.1=0;
delay_ms(10);
PORTC.0=0;
PORTC.1=1;
Berdasarkan program di atas, maka lamanya logika low (0) pada PORTC.1 adalah 10 milidetik dan lamanya logika high (1) adalah 10 milidetik atau 0,01 detik. Dimana 0,01 detik untuk pulsa high dan 0,01 detik untuk pulsa low. Dapat digambarkan seperti gambar sinyal berikut
0,01 detik 0,01 detik
PC.0
PC.1 Low High
0,02 detik
Dengan demikian frekuensi yang dihasilkan oleh PORTC.0 adalah :
1 1
Hal yang sama juga terjadi pada output dari PORTC.1. perioda yang dihasilkan oleh rangkaian mikrokontroler pada PORTC.1 adalah 0,01 detik. Dimana 0,01 detik untuk pulsa high dan 0,01 detik untuk pulsa low. Dapat digambarkan seperti gambar sinyal berikut
0,01 detik 0,01 detik
PC.1
PC.0 Low High
0,02 detik
Dengan demikian frekuensi yang dihasilkan oleh PORTC.1 adalah :
1 1
driver transistor. Dengan demikian masukan ini akan diolah oleh rangkaian driver transistor untuk membentuk tegangan AC 12 volt.
4.1.6 Pengujian pulsa PWM
Pulsa yang keluar dari mikrokontroler berupa sinyal kotak dimana sinyal high
dengan keseluruhan sinyal merupakan duty cycle yang dihasilkan. Pengujian sinyal PWM dilakukan dengan mengukur lebar pulsa low dan high dari sinyal PWM yang dikeluarkan dengan menggunakan oscilloscope.
Berdasarkan pengujian pulsa/sinyal yang dilakukan maka diperoleh yang dilkakukan maka diperoleh sinyal-sinyal PWM dengan duty cycle 25%, 50%, 75 %, dan 100% seperti gambar 4.1, gambar 4.2, gambar 4.3, dan gambar 4.4.
Gambar 4.1 Sinyal PWM dengan duty cycle 25 %(Time/Div:20 mS;Volt/Div :1V )
Gambar 4.3 Sinyal PWM dengan duty cycle 75 % (Time/Div :20 mS;Volt/Div:1V)
4.2 Analisis Pengujian
4.2.1 Pengukuran Temperatur Terhadap Waktu
Berdasarkan pengukuran yang dilakukan, besarnya kenaikan temperatur terhadap waktu dengan duty cycle yang berbeda-beda, maka data yag diperoleh dapat disajikan dalam bentuk tabel, seperti tabel 4.2, tabel 4,3, tabel 4.4, dan tabel 4.5 berikut ini :
Tabel 4.2 Data Pengukuran Tempe ratur Terhadap Waktu Dengan Duty cycle
100 %
Temperatur Pada Sensor (0C) Waktu
29 10:30
Tabel 4.3 Data Pengukuran Temperatur Terhadap Waktu Dengan Duty cycle 75 %
Temperatur Pada Sensor (0C) Waktu
29 11:48
30 11:58
31 12:08
32 12:18
34 12:38
37 12:48
Tabel 4.4 Data Pengukuran Temperatur Terhadap Waktu Dengan Duty cycle 50 %
Temperatur Pada Sensor (0C) Waktu
29 12:48
30 12:58
31 13:08
32 13:18
33 13:28
33 13:38
34 13:48
Tabel 4.5 Data Pengukuran Temperatur Terhadap Waktu Dengan Duty cycle 25 %
Temperatur Pada Sensor ( 0C) Waktu
29 15:28
29 15:38
30 15:48
31 15:58
31 16:08
32 16:18
4.2.2 Hubungan Temperatur Vs Waktu
Berdasarkan data pengukuran hubungan temperatur terhadap waktu pada tabel 4.1, tabel 4.2, tabel 4.3, dan tabel 4.4 maka dapat dibuat grafik hubungan temperatur vs waktu seperti gambar 4.5, gambar 4.6, gambar 4.7, dan gambar 4.8 berikut ini :
Gambar 4.5 Grafik Hubungan Temperatur Vs Waktu dengan Duty cycle 100 %
Gambar 4.7 Grafik Hubungan Temperatur Vs Waktu dengan Duty cycle 50 %
Gambar 4.8 Grafik Hubungan Temperatur Vs Waktu dengan Duty cycle 25 %
berlangsung hingga mencapai duty cycle yang ditentukan. Dari gambar 4.5, Grafik hubungan temperatur terhadap waktu dengan duty cycle 100% dapat dilihat bahwa kenaikan suhu lebih stabil sehingga grafiknya lebih linear dibandingkan dengan grafik yang lain yang memiliki duty cycle 75%, 50%, dan 25%.
4.2.3 Perhitungan jumlah gelombang yang dibutuhkan
Berdasarkan data yang diproleh pada tabel 4.2, tabel 4.3, tabel 4.4, dan tabel 4.5 dapat dicari jumlah gelombang dengan menggunakan rumus :
c. Untuk suhu 32 0C n = 50 x 1.800 = 90.000 d. Untuk suhu 33 0C
n = 50 x 2.400 = 120.000 e. Untuk suhu 34 0C
n = 50 x 3.600 = 180.000
D. Dengan Duty cycle 25 %
a. Untuk suhu 30 0C n = 50 x 1.200 = 60.000 b. Untuk suhu 31 0C
n = 50 x 2.400 = 120.000 c. Untuk suhu 32 0C
4.2.4 Menghitung Energi Kalor
Berdasarkan data yang diproleh pada tabel 4.2, tabel 4.3, tabel 4.4, dan tabel 4.5 dapat dihitung energi kalor yang dibutuhkan untuk masing- masing duty cycle dengan menggunakan rumus energi kalor :
D. Dengan Duty cycle 25 % a. Untuk suhu 300C
Q = (48 x10-2) (41,8 x 102) (303 - 302) Q = (2.006,4) (1)
Q = 2.006,4 J
b. Untuk suhu 31 0C
Q = (48 x10-2) (41,8 x 102) (304 - 302) Q = (2.006,4) (2)
Q = 4.012,8 J
c. Untuk suhu 32 0C
Q = (48 x10-2) (41,8 x 102) (305 - 302) Q = (2006,4) (3)
Dari perhitungan jumlah gelombang yang dibutuhkan dan energi kalor, terlihat bahwa semakin besar nilai temperatur yang diinginkan maka jumlah energi kalor yang dibutuhkan akan semakin besar, demikian juga jumlah gelombang yang terjadi. Hal tersebut dapat dilihat pada tabel 4.6 berikut ini :
Tabel 4.6 Data Perhitungan Jumlah gelombang dan energi kalor yang dibutuhkan untuk variasi temperatur yang diiginkan.
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari hasil penelitian ini maka dapat ditarik kesimpulan sebagai berikut :
1. Berdasarkan data dan analisis yang didapat dari perancangan alat dengan menggunakan mikrokontroler ATmega 8535 yang didalamnya sudah dilengkapi dengan fasilitas PWM, dengan mengatur sinyal PWM maka suhu dapat dikendalikan sesuai dengan nilai suhu yang dinputkan 290C, 300C, 310C, 320C, 330C, 340C, 370C dan 380C.
2. Berdasarkan data dan analisis, telah berhasil dirancang sebuah alat pemanas air (heater) yang dilengkapi dengan teknik modulasi lebar pulsa (teknik PWM). Dimana suhu yang di inginkan terlebih dahulu diinputkan dan input suhu tersebut sebagai data yang akan diolah oleh mikrokontroler kemudian dibangkitkan pulsa yang akan diatur lebarnya untuk duty cycle yang berbeda-beda. Untuk duty cycle 100% suhu maksimum yang dicapai dalam 1 jam adalah 380C , duty cycle 75% sebesar 370C, duty cycle 50 % sebesar 340C, dan duty cycle 25% sebesar 320C. Mikrokontroler akan tetap bekerja memberikan sinyal hingga suhu yang diinputkan tercapai dan akan berhenti ketika suhu melebihi nilai yang diinputkan. Dengan demikian suhu bisa dikendalikan.
5.2 Saran
1. Berdasarkan data dan analisis dari alat yang telah dirancang disarankan untuk pengembangan selanjutnya, meningkatkan daya yang akan di suplai ke heater guna mendapatkan suhu yang lebih tinggi.
DAFTAR PUSTAKA
Bejo, Agus. 2007. C&AVR ’’Rahasia Kemudahan Bahasa C Dalam Mikrokontroler ATMega8535’’. Yogyakarta: Graha Ilmu.
Budiharto, Widodo. 2006. Belajar Sendiri Membuat Robot Cerdas. Bekasi: Elex Media Komputindo.
Hartono, Puji. 2008. Analisis Pengendali Motor DC Menggunakan Metoda Logika
Fuzzy Dengan Pencatudayaan PWM. Bandung : ITB
Heryanto, Ari M. & Wisnu Adi. 2008. Pemrograman Bahasa C Untuk Mikrokontroler ATM ega8535. Yogyakarta: Penerbit Andi.
Pitowarno,E. 2005. Mikroprosessor & Interfacing. Yogyakarta: Penerbit Andi.
Roden, Martin, 1982. Digital and Data Communication System. California: Prentice-Hall, Inc.,
Wardana, Lingga. 2006. Belajar Sensiri Mikrokontroler AVR Seri ATMega8535, Simulasi Hardware Dan Aplikasi. Yogyakarta: Penerbit Andi.
Winoto, Ardi. 2008. Mikrokontroler AVR ATM ega8/32/16/8535 Dan