APLIKASI PROGRAM DINAMIK PADA PENGALOKASIAN
SUMBER DAYA MODAL MENGGUNAKAN
METODE LAGRANGE
SKRIPSI
NURLITA ILHAM
100803025
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
APLIKASI PROGRAM DINAMIK PADA PENGALOKASIAN
SUMBER DAYA MODAL MENGGUNAKAN
METODE LAGRANGE
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat untuk mencapai
gelar Sarjana Sains
NURLITA ILHAM
100803025
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
i
PERSETUJUAN
Judul : Aplikasi Program Dinamik Pada
Pengalokasian Sumber Daya Modal Menggunakan Metode Lagrange
Kategori : Skripsi
Nama : Nurlita Ilham
Nomor Induk Mahasiswa : 100803025
Program Studi : Sarjana (S1) Matematika
Departemen : Matematika
Fakultas : Matematika Dan Ilmu Pengetahuan Alam
(FMIPA) Universitas Sumatera Utara
Disetujui di Medan, Juli 2014
Komisi Pembimbing:
Pembimbing 2, Pembimbing 1,
Dr. Esther S M Nababan, M.Sc. Drs. Rosman Siregar, M.Si.
NIP. 196103181987112001 NIP. 196101071986011001
Disetujui oleh
Departemen Matematika FMIPA USU Ketua,
ii
PERNYATAAN
APLIKASI PROGRAM DINAMIK PADA PENGALOKASIAN SUMBER DAYA MODAL MENGGUNAKAN
METODE LAGRANGE
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil kerja saya sendiri. Kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Juli 2014
iii
PENGHARGAAN
Puji dan syukur penulis panjatkan kepada Allah SWT Yang Maha Pemurah dan Maha Penyayang, dengan limpahan karunia-Nya penulis dapat menyelesaikan penyusunan skripsi ini dengan judul Aplikasi Program Dinamik Pada Pengalokasian Sumber Daya Modal Menggunakan Metode Lagrange.
iv
APLIKASI PROGRAM DINAMIK PADA PENGALOKASIAN SUMBER DAYA MODAL MENGGUNAKAN
METODE LAGRANGE
ABSTRAK
Pemrograman dinamik merupakan salah satu teknik optimasi yang digunakan untuk memecahkan masalah bertahap ganda. Pada setiap tahap untuk semua nilai variabel state yang fisibel, fungsi return dihitung untuk setiap variabel keputusan yang mungkin. Tidaklah mengherankan jika masalah dengan banyak tahap dan dengan variabel state yang banyak akan sulit dipecahkan meskipun dengan komputer berkecepatan tinggi sekalipun. Ada salah satu metode yang dapat digunakan untuk mengurangi perhitungan pada pemrograman dinamik, yaitu dengan metode pengali lagrange yang akan mengurangi variabel state. Metode ini digunakan untuk mengurangi jumlah kendala sehingga jumlah variabel state berkurang. Dari perpaduan teknik persamaan fungsi program dinamik dan pengali lagrange dapat diuraikan proses kompleks menjadi lebih sederhana. Salah satu aplikasi yang digunakan yaitu pada pengalokasian sumber daya modal, yang dalam hal ini pengali lagrange berperan sebagai price. Penelitian ini akan menunjukkan pengaruh nilai pengali lagrange terhadap fungsi return dan jumlah kendala, yaitu semakin meningkat nilai pengali lagrange maka semakin sedikit sumber daya modal yang digunakan. Dan untuk nilai pengali lagrange tertentu, akan menujukkan semakin banyak jumlah kendala, maka semakin banyak return yang diperoleh.
Kata kunci: Pemrograman dinamik, pengali lagrange, pengalokasian sumber
v
APPLICATION OF DYNAMIC PROGRAMMING ON RESOURCE ALLOCATION OF CAPITAL
USING LAGRANGE METHOD
ABSTRACT
Dynamic programming is one of the optimization techniques used to solve the problem of multiple stages. At every stage of the value for all feasible state variables, function return is calculated for each possible decision variables. It is not surprising that problems with many stages and with many state variables that will be difficult to solve even with high-speed computers though. There is one method that can be used to reduce the calculation of the dynamic programming, that is the lagrange multiplier method which will reduce the state variables. This method is used to reduce the number of constraints that reduced the number of state variables. From the functional equation technique of dynamic programming and the lagrange multiplier yields a decomposition of complex processes into simpler parts. One of the applications that are used in the allocation of capital resources, which in this case acts as a lagrange multiplier price. The result of this research show the influence of the value of the lagrange multiplier function returns and the number of constraints, if the lagrange multiplier is increased, then the less resources of capital are used.
Daftar Tabel viii
Daftar Gambar ix
Daftar Lampiran x
Bab 1. Pendahuluan 1
1.1 Latar Belakang 1
1.2 Perumusan Masalah 2
1.3 Batasan Masalah 3
1.4 Tujuan Penelitian 3
1.5 Manfaat Penelitian 3
1.6 Metodologi Penelitian 4
Bab 2. Landasan Teori 5
2.1 Proses Alokasi 5
2.2 Program Dinamik 6
2.2.1Prinsip Keoptimalan 7
2.2.2Karakteristik Persoalan Program Dinamik 8 2.2.3Pendekatan Penyelesaian Program Dinamik 9
2.3 Metode Lagrange 10
2.3.1 Monotonicity dalam 12
Bab 3. Pembahasan 14
3.1Persoalan Program Dinamik 14
3.1.1 Pembentukan Persamaaan Rekursif Secara Umum 15
3.1.2 Contoh Kasus Aplikasi 17
vii
DAFTAR TABEL
Nomor Tabel
Judul Halaman
3.1 Data Return Tiap Kegiatan ( = 3) 17
3.2 Tabel Solusi Optimal Dengan 27
3.3 Tabel Solusi Optimal Dengan 27
3.4 Tabel Solusi Optimal Dengan 28
3.5 Tabel Solusi Optimal Dengan 28
3.6 Tabel Solusi Optimal Dengan 28
3.7 Tabel Solusi Optimal Dengan 29
3.8 Tabel Solusi Optimal Dengan 29
3.9 Tabel Solusi Optimal Dengan 29
3.10 Tabel Solusi Optimal Dengan 30
3.11 Tabel Solusi Optimal Dengan 30
3.12 Tabel Solusi Optimal Dengan 31
3.13 Tabel Solusi Optimal Dengan 31
3.14 Tabel Solusi Optimal Dengan 31
viii
DAFTAR GAMBAR
Nomor Gambar
Judul Halaman
2.1 Grafik Fungsi Return 7
3.1 Grafik Fungsi 32
3.2 Grafik Fungsi Terhadap Jumlah 33
iv
APLIKASI PROGRAM DINAMIK PADA PENGALOKASIAN SUMBER DAYA MODAL MENGGUNAKAN
METODE LAGRANGE
ABSTRAK
Pemrograman dinamik merupakan salah satu teknik optimasi yang digunakan untuk memecahkan masalah bertahap ganda. Pada setiap tahap untuk semua nilai variabel state yang fisibel, fungsi return dihitung untuk setiap variabel keputusan yang mungkin. Tidaklah mengherankan jika masalah dengan banyak tahap dan dengan variabel state yang banyak akan sulit dipecahkan meskipun dengan komputer berkecepatan tinggi sekalipun. Ada salah satu metode yang dapat digunakan untuk mengurangi perhitungan pada pemrograman dinamik, yaitu dengan metode pengali lagrange yang akan mengurangi variabel state. Metode ini digunakan untuk mengurangi jumlah kendala sehingga jumlah variabel state berkurang. Dari perpaduan teknik persamaan fungsi program dinamik dan pengali lagrange dapat diuraikan proses kompleks menjadi lebih sederhana. Salah satu aplikasi yang digunakan yaitu pada pengalokasian sumber daya modal, yang dalam hal ini pengali lagrange berperan sebagai price. Penelitian ini akan menunjukkan pengaruh nilai pengali lagrange terhadap fungsi return dan jumlah kendala, yaitu semakin meningkat nilai pengali lagrange maka semakin sedikit sumber daya modal yang digunakan. Dan untuk nilai pengali lagrange tertentu, akan menujukkan semakin banyak jumlah kendala, maka semakin banyak return yang diperoleh.
Kata kunci: Pemrograman dinamik, pengali lagrange, pengalokasian sumber
v
APPLICATION OF DYNAMIC PROGRAMMING ON RESOURCE ALLOCATION OF CAPITAL
USING LAGRANGE METHOD
ABSTRACT
Dynamic programming is one of the optimization techniques used to solve the problem of multiple stages. At every stage of the value for all feasible state variables, function return is calculated for each possible decision variables. It is not surprising that problems with many stages and with many state variables that will be difficult to solve even with high-speed computers though. There is one method that can be used to reduce the calculation of the dynamic programming, that is the lagrange multiplier method which will reduce the state variables. This method is used to reduce the number of constraints that reduced the number of state variables. From the functional equation technique of dynamic programming and the lagrange multiplier yields a decomposition of complex processes into simpler parts. One of the applications that are used in the allocation of capital resources, which in this case acts as a lagrange multiplier price. The result of this research show the influence of the value of the lagrange multiplier function returns and the number of constraints, if the lagrange multiplier is increased, then the less resources of capital are used.
ix
BAB 1
PENDAHULUAN
1.1 Latar Belakang
Case and Fair (2007) mengemukakan bahwa benda-benda yang diproduksi lebih dahulu dan kemudian digunakan dalam produksi barang dan jasa lain disebut dengan sumber daya modal, atau cukup disebut modal (capital). Gedung, peralatan, meja, kursi, software, jalan, jembatan, dan jalan raya adalah bagian dari stok modal (capital). Seperti sumber daya lainnya, sumber daya modal juga langka. Dalam kehidupan sehari-hari, dapat dilihat banyak perusahaan yang gulung tikar karena kekurangan modal. Di negara-negara tertentu, kemajuan ekonominya lambat karena kekurangan barang modal di masyarakat yang bersangkutan. Banyak proyek pembangunan yang tertunda juga karena terbatasnya modal. Jadi, kelangkaan modal bukan berarti modal yang ada sedikit, tetapi karena adanya ketidakseimbangan akan kebutuhan modal dengan jumlah modal yang tersedia. Mengingat keberadaan sumber daya modal yang dimiliki masyarakat umum jumlahnya terbatas, perlu dilakukan alokasi secara efisien. Karena ketepatan alokasi sumber daya modal akan memberikan kekuatan kepada masyarakat maupun instansi-instansi tertentu, namun sebaliknya ketidaktepatan alokasi sumber daya akan berakibat menjadi bumerang di dalam mempertahankan eksistensi strategi.
x
adalah membagi satu persoalan atas beberapa bagian persoalan yang dalam program dinamik disebut tahap, kemudian memecahkan tiap tahap sampai seluruh persoalan telah terpecahkan. Akan tetapi, masalah dengan banyak tahap dan dengan variabel state yang banyak akan sulit dipecahkan meskipun dengan komputer berkecepatan tinggi. Dalam penulisan ini, penulis akan memberikan pendekatan penyelesaian permasalahan pengalokasian sumber daya modal dengan menggunakan metode pengali lagrange yang akan dipadukan dengan persamaan fungsi program dinamik.
Metode pengali lagrange merupakan metode yang digunakan untuk menentukan harga/nilai maksimum atau minimum relatif dari suatu fungsi yang dibatasi oleh suatu kondisi (constraint conditions). Sesuai namanya, konsep ini dikemukakan oleh Joseph Louis Langrange (1736-1813). Dalam hal ini, pengali lagrange yang berupa variabel baru akan mengurangi dimensi dari formulasi program dinamik. Sehingga suatu proses penyelesaian yang rumit dapat diuraikan menjadi beberapa bagian proses penyelesaian yang lebih sederhana dan lebih efisien. Untuk itulah penulis memilih judul, “Aplikasi Program Dinamik Pada
Pengalokasian Sumber Daya Modal Menggunakan Metode Lagrange”.
1.2 Perumusan Masalah
Pada penelitian ini, yang menjadi permasalahan dalam program dinamik adalah apabila terdapat suatu permasalahan dengan banyak tahap dan dengan variabel state yang banyak, maka permasalahan tersebut akan sulit dipecahkan. Sehingga dibutuhkan salah satu metode yang dapat digunakan untuk mengurangi perhitungan pada pemrograman dinamik, yaitu dengan metode pengali lagrange yang akan mengurangi variabel state.
xi
max , , … ,
subject to: , , , … ,
, , … , untuk semua nilai dan
Untuk menentukan nilai optimal dari persoalan tersebut digunakan pengali lagrange sehingga persamaan fungsinya menjadi:
max , , … ,
subject to: , , … ,
, , … , untuk semua nilai dan
1.3 Batasan Masalah
Dalam tulisan ini penulis hanya membatasi permasalahannya pada pembahasan tentang masalah pengalokasian sumber daya modal yang jumlah ketersediaannya terbatas, yang akan diselesaikan dengan perpaduan antara formulasi program dinamik dengan metode lagrange.
1.4 Tujuan Penelitian
Adapun tujuan dari penelitian ini adalah mengkaji aplikasi program dinamik yang dikombinasikan dengan metode lagrange pada pengalokasian sumber daya modal untuk mendapatkan hasil yang optimal.
1.5 Manfaat Penelitian
xii
permasalahan yang berkaitan dengan pengalokasian sumber daya modal dalam jumlah kendala yang besar, dan juga dapat diterapkan dalam bidang operasi penelitian lainnya.
1.6 Metodologi Penelitian
Penelitian ini bersifat studi literatur, yaitu dengan melakukan penelitian literatur dan mengumpulkan data-data dari referensi buku dan jurnal-jurnal yang diperoleh dari perpustakaan maupun internet, dan melakukan bimbingan dengan dosen pembimbing untuk memperoleh bahan-bahan yang berkaitan dengan permasalahan yang dihadapi.
Adapun langkah-langkah yang penulis lakukan adalah sebagai berikut: 1. Menjelaskan proses pengalokasian.
2. Menjelaskan definisi Program Dinamik. 3. Menjelaskan definisi metode lagrange.
4. Memberikan contoh persoalan program dinamik menggunakan solusi numerik, dengan menggunakan perhitungan maju (forward) dan perhitungan mundur (backward).
5. Menjelaskan prosedur penyelesaian permasalahan menggunakan metode pengali lagrange.
6. Menjelaskan fungsi baru lagrange yang telah dimodifikasi berdasarkan formulasi Program Dinamik.
7. Mengambil contoh soal pengalokasian sumber daya modal yang diperoleh dari buku untuk diselesaikan dengan menggunakan perpaduan metode lagrange dan program dinamik.
8. Menarik beberapa kesimpulan.
xiii
BAB 2
LANDASAN TEORI
2.1 Proses Alokasi
Andaikan terdapat sejumlah sumber daya modal tertentu, yaitu dapat berupa uang untuk investasi, mesin cetak , bahan bakar untuk kendaraan dan lain sebagainya. Suatu permasalahan yang sering terjadi yaitu bagaimana suatu modal dapat digunakan dengan cara yang berbeda. Dalam hal ini, masing-masing aplikasi yang mungkin disebut dengan kegiatan (activity). Adapun asumsi dasar yang perlu diperhatikan adalah:
1. Keuntungan dari suatu kegiatan tidak bergantung pada keuntungan dari kegiatan lainnya.
2. Jumlah keuntungan secara menyeluruh dapat diperoleh dari penjumlahan keuntungan tiap kegiatan.
Permasalahan dasarnya adalah bagaimana membagi sumber daya modal pada setiap kegiatan untuk memaksimumkan fungsi keutungan.
Secara matematis, permasalahan pengalokasian modal dapat diformulasikan sebagai berikut:
max , , … , .
subject to: ,
di mana: = fungsi keuntungan (return)pada kegiatan i dengan sumber
daya modal yang tersedia. , , … ,
, , … ,
xiv
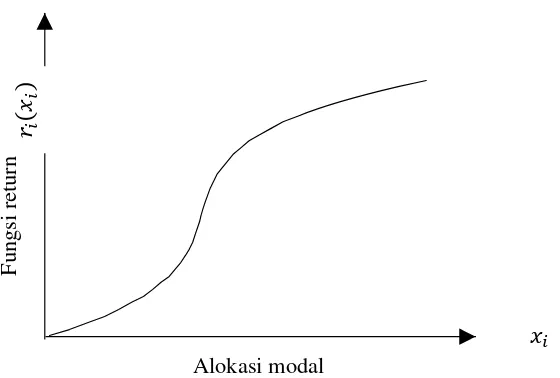
Berdasarkan rumusan persoalan di atas, dapat digambarkan grafik fungsi return sebagai berikut:
Fungsi return
Alokasi modal
Gambar 2.1 Grafik Fungsi Return
Gambar di atas menunjukkan bahwa fungsi keuntungan bergantung pada jumlah modal yang dialokasikan dalam suatu kegiatan. Dimulai dari jumlah modal yang paling sedikit ( ) dengan tidak mendapatkan keuntungan, hingga batas jumlah modal yang disediakan.
2.2 Program Dinamik
Program dinamik adalah suatu teknik matematika untuk mengoptimalkan proses pengambilan keputusan, yaitu dengan membuat serangkaian keputusan yang saling berkaitan.
Definisi 2.1. Tahap (stage) merupakan bagian dari masalah yang memiliki
beberapa alternatif yang saling terpisah dimana alternatif yang terbaik akan
ditentukan.
Definisi 2.2. State merupakan mata rantai yang menghubungkan satu tahap dengan tahap lainnya.
xv
2.2.1 Prinsip Keoptimalan
Pendekatan program dinamik didasarkan pada Prinsip optimisasi Bellman. Bellman (1950) mengemukakan bahwa “Suatu kebijakan optimal mempunyai sifat bahwa apapun keadaan dan keputusan awal, keputusan berikutnya harus membentuk suatu kebijakan optimal dengan memperhatikan keadaan dari hasil keputusan pertama”.
Prinsip ini mengandung arti bahwa :
1. Diperkenankan untuk mengambil keputusan yang layak bagi tahap persoalan yang masih tersisa tanpa melihat kembali keputusan-keputusan masa lalu atau tahap-tahap terdahulu.
2. Dalam rangkaian keputusan yang telah diambil, hasil dari masing-masing tergantung pada hasil keputusan sebelumnya dalam rangkaian.
Misalkan jika telah diambil keputusan yang salah pada tahap pertama atau tahap kedua, bukan berarti keputusan yang benar tidak dapat diambil pada tahap ketiga, keempat dan seterusnya.
Stuart E. Dreyfuse dan Averill M. Law (1977) dalam bukunya yang berjudul “Mathematics In Science and Engineering: The Art and Theory of Dynamic Programming” mendefinisikan fungsi nilai optimal sebagai:
max, ,.., .
di mana: perolehan keuntungan maksimum dari kegiatan sampai , dengan unit sumber daya yang tersisa untuk dialokasikan.
= alokasi untuk kegiatan , , … ,
2.2.2 Karakteristik Persoalan Program Dinamik
xvi
secara bertahap. Struktur dasar tersebut adalah karakteristik persoalan program dinamik yang disajikan sebagai berikut:
1. Persoalan dapat dibagi menjadi beberapa tahap (stage), yang pada setiap tahap hanya diambil satu keputusan.
2. Masing-masing tahap terdiri dari sejumlah status (state) yang berhubungan dengan tahap tersebut. Secara umum, state merupakan bermacam kemungkinan masukan yang ada pada tahap tersebut.
3. Hasil dari keputusan yang diambil pada setiap tahap ditransformasikan dari status yang bersangkutan ke status berikutnya pada tahap berikutnya.
4. Ongkos (cost) pada suatu tahap meningkat secara teratur (steadily) dengan bertambahnya jumlah tahapan.
5. Ongkos pada suatu tahap bergantung pada ongkos tahap-tahap yang sudah berjalan dan ongkos pada tahap tersebut.
6. Keputusan terbaik pada suatu tahap bersifat saling bebas terhadap keputusan yang dilakukan pada tahap sebelumnya.
7. Adanya hubungan rekursif yang mengidentifikasikan keputusan terbaik untuk setiap status pada tahap memberikan keputusan terbaik untuk setiap status pada tahap .
8. Prinsip optimalitas berlaku pada persoalan tersebut.
2.2.3 Pendekatan Penyelesaian Program Dinamik
Pendekatan Penyelesaian yang digunakan dalam program dinamik ada 2 cara, yaitu:
1. Perhitungan Maju (Forward)
Pada perhitungan maju, suatu persoalan program dinamik umumnya dapat diselesaikan dengan menghitung terlebih dahulu, lalu dilanjutkan berdasarkan proses rekursif ke dan seterusnya.
xvii
→ → → ⋯ →
Di mana merupakan fungsi awal dari fungsi rekursif dan merupakan fungsi akhir.
Diagram cara perhitungan maju:
: fungsi keuntungan pada tahap : variabel keadaan pada tahap n
2. Perhitungan Mundur (Backward)
Pada perhitungan mundur, suatu persoalan program dinamik diselesaikan dengan menghitung terlebih dahulu, lalu dilanjutkan berdasarkan proses rekursif dan berakhir di .
Urutan perhitungannya adalah:
→ → → ⋯ →
Di mana merupakan fungsi awal dari fungsi rekursif dan merupakan fungsi akhir.
Diagram cara perhitungan mundur:
: fungsi keuntungan pada tahap
: variabel keadaan pada tahap n
xviii
dirumuskan sebagai alokasi untuk tahap dan tahap berikutnya. Dalam memecahkan suatu persoalan tidak dapat segera diketahui cara mana yang lebih mudah digunakan. Oleh karena itu, jika mengalami kesulitan untuk merumuskan persoalan dengan menggunakan perhitungan maju maka dapat menggunakan cara perhitungan mundur.
2.3 Metode Lagrange
Metode pengali Lagrange merupakan sebuah teknik dalam menyelesaikan masalah optimasi dengan kendala persamaan. Inti dari metode pengali Lagrange adalah mengubah persoalan titik ekstrim terkendala menjadi persoalan ekstrim bebas kendala. Fungsi yang terbentuk dari tranformasi tersebut dinamakan fungsi Lagrange. Misalkan permasalahan yang dihadapi adalah:
Maksimumkan/Minimumkan: , , , … ,
Disini jika terjadi bahwa maka tidak dapat diselesaikan. Akan tetapi untuk dapat menyelesaikannya maka (jumlah kendala lebih kecil daripada variabel). Metode ini dimulai dengan pembentukan fungsi lagrange yang didefinisikan sebagai :
, .
Arti dari pengali lagrange secara fisik yang menarik misalkan terdapat permasalahan optimasi dengan satu kendala sebagai berikut:
xix Fungsi lagrangenya adalah
, (2.6)
Syarat perlu untuk penyelesaian di atas adalah
untuk , , … ,
Maka persamaan di atas menghasilkan :
untuk , , … ,
atau
Diperoleh:
untuk , , … ,
Atau
Atau
xx Karena
atau
Dapat diambil kesimpulan bahwa dari persamaan di atas pada penyelesaian optimum, perubahan fungsi tujuan berbanding lurus dengan perubahan kendala
dengan faktor sebesar pengali lagrange .
2.3.1 Monotonicity dalam
Jika suatu nilai bertambah dari 0 sampai ∞, maka ∑ berkurang secara monoton. Sehingga nilai dapat diperkirakan sebagai harga (price).
̅ , .
.
Jika , dari sifat maksimasi diketahui
. .
Dari persamaan (2.8) dan (2.9) diperoleh
.
Sehingga,
.
xxi
.
Hasil dari persamaan (2.12) digabungkan dengan persamaan (2.8) diperoleh
.
di mana .
Monotonicity ini menyederhanakan penentuan nilai dengan diberikannya nilai .
xxii
BAB 3
PEMBAHASAN
3.1 Persoalan Program Dinamik
Masalah utama dalam pemrograman dinamik adalah mengubah masalah asal menjadi bentuk persamaan rekursif. Komponen dalam persamaan rekursif adalah tahap, keputusan, state, fungsi transformasi, dan fungsi return. Berdasarkan komponen tersebut pemrograman dinamik dapat diklasifikasikan menjadi :
1. Berdasarkan variabel keputusan / variabel state a. Pemrograman dinamik dengan variabel diskrit b. Pemrograman dinamik dengan variabel kontinu 2. Berdasarkan jumlah state
a. Pemrograman dinamik dengan satu state b. Pemrograman dinamik dengan beberapa state 3. Berdasarkan jumlah tahap
a. Pemrograman dinamik dengan tahap berhingga b. Pemrograman dinamik dengan tahap tak berhingga 4. Berdasarkan hubungan antar tahap
a. Pemrograman dinamik dengan tahap seri b. Pemrograman dinamik dengan tahap paralel 5. Berdasarkan fungsi transformasi
a. Pemrograman dinamik deterministik b. Pemrograman dinamik probabilistik
Dalam penulisan ini, penulis hanya akan membahas beberapa masalah di atas, yaitu pemrograman dinamik deterministik dengan beberapa state pada variabel diskrit.
xxiii
Pemrograman dinamik deterministik adalah pemrograman dinamik yang diterapkan pada masalah-masalah deterministik, dimana keadaan pada tahap berikutnya ditentukan secara lengkap dan pasti oleh keadaan dan keputusan pada tahap yang sedang berlangsung.
Misalkan fungsi tujuan sebagai berikut:
max, ,…, , , … , .
Dimana ⋯
Fungsi harus dapat dipisahkan
, , … , …
.
Fungsi tujuan didekomposisi
max, ,…, , , … , .
terhadap
max, ,…, max, ,..., … .
terhadap
Dari definisi dapat ditulis
max, ,…, … .
max, ,…, .
Secara umum persamaan rekursif dapat ditulis sebagai berikut:
max, ,…, .
max, ,…,
Persamaan rekursif di atas disebut persamaan rekursif maju. Dalam persamaan rekursif maju, nilai variabel state tahap ke – harus diketahui, agar variabel keputusan yang optimal dapat dicari. Jika variabel state yang diketahui nilainya adalah variabel state tahap awal, maka persamaan rekursif yang digunakan adalah persamaan rekursif mundur yaitu:
max, ,…, .
Jika pemrograman dinamik merupakan pemrograman dinamik dengan beberapa variabel state, maka nilai awal atau nilai akhir seluruh variabel state tersebut harus diketahui.
3.1.2 Contoh Kasus Aplikasi
xxv
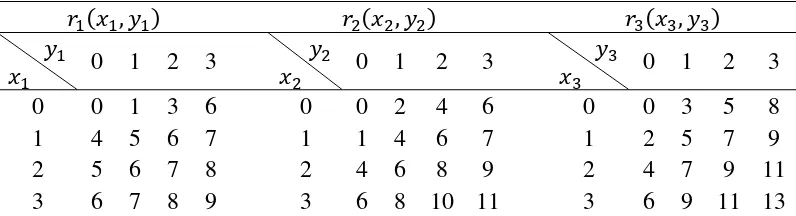
akibatnya jumlah keuntungan yang diperoleh juga berbeda. Data return (dalam satuan jutaan) tiap perusahaan (kegiatan) disajikan dalam tabel berikut.
Tabel 3.1 Data return Tiap Kegiatan ( = 3)
, , ,
0 1 2 3 0 1 2 3 0 1 2 3
0 0 1 3 6 0 0 2 4 6 0 0 3 5 8
1 4 5 6 7 1 1 4 6 7 1 2 5 7 9
2 5 6 7 8 2 4 6 8 9 2 4 7 9 11
3 6 7 8 9 3 6 8 10 11 3 6 9 11 13
Tujuan perusahaan yaitu memaksimumkan return dengan terbatasnya jumlah mesin cetak yang tersedia.
Variabel state
: jumlah mesin cetak tipe A pada kegiatan 1 : jumlah mesin cetak tipe A pada kegiatan 2 : jumlah mesin cetak tipe A pada kegiatan 3 : jumlah mesin cetak tipe B pada kegiatan 1 : jumlah mesin cetak tipe B pada kegiatan 2 : jumlah mesin cetak tipe B pada kegiatan 3
Memodelkan fungsi tujuan dan kendala
Tujuannya adalah memaksimumkan total return dengan menjumlahkan return tiap kegiatan.
Maximum : , , , .
xxvi
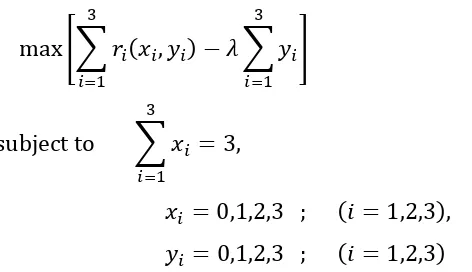
Sehingga, jika digabungkan diperoleh program matematis sebagai berikut:
Maksimum
∶ , .
Kendala ∶
, , ,
Andaikan , = return maksimum dari kegiatan k sampai , dengan unit mesin cetak tipe A dan mesin cetak tipe B yang tersedia.
Maka, persamaan rekursif untuk permasalahan di atas adalah:
, max, ,…,
, ,…,
, , .
dimana: , , .
Berdasarkan persamaan rekursif, perhitungan diimulai dari tahap akhir.
Tahap 3 (
Untuk = 0, dan = 0, 1, 2 dan 3.
, max [0] = 0, , (0, 0)
, max[0, 3] = 3, , (0, 1)
, max[0, 3, 5] = 5, , (0, 2)
xxvii Untuk = 1, dan = 0, 1, 2 dan 3.
, max [0, 2] = 2, , (1, 0)
, max[0, 3, 2, 5] = 5, , (1, 1)
, max [0, 3, 5, 2, 5, 7] = 7, , (1, 2)
, max[0, 3, 5, 8, 2, 5, 7, 9] = 9, , (1, 3)
Untuk = 2, dan = 0, 1, 2 dan 3.
, max [0, 2, 4] = 4, , (2, 0)
, max[0, 3, 2, 5, 4, 7] = 7, , (2, 1)
, max [0, 3, 5, 2, 5, 7, 4, 7, 9] = 9, , (2, 2)
, max[0, 3, 5, 8, 2, 5, 7, 9, 4, 7, 9, 11] = 11, , (2, 3)
Untuk = 3, dan = 0, 1, 2 dan 3.
, max [0, 2, 4, 6] = 6, , (3, 0)
, max[0, 3, 2, 5, 4, 7, 6, 9] = 9, , (3, 1)
, max [0, 3, 5, 2, 5, 7, 4, 7, 9, 6, 9, 11] = 11, , (3, 2)
, max [0, 3, 5, 8, 2, 5, 7, 9, 4, 7, 9, 11, 6, 9, 11, 13] = 13, , (3, 3)
Tahap 2
Untuk = 0, dan = 0, 1, 2 dan 3.
, max [0 + 0] = 0, , = (0, 0)
, max[0 + 3, 2 + 0] = 3, , = (0, 0)
xxviii
, max[0 + 8, 2 + 5, 4 + 3, 6 + 0] = 8, , = (0, 0)
Untuk = 1, dan = 0, 1, 2 dan 3.
, max [0 + 2, 1 + 0] = 2, , = (0, 0)
, max[0 + 5, 2 + 2, 1 + 3, 4 + 0] = 5, , = (0, 0)
, max [0 + 7, 2 + 5, 4 + 2, 1 + 5, 4 + 3, 6 + 0] = 7,
, = (0, 0), (0, 1) atau (1, 1)
, max[0 + 9, 2 + 7, 4 + 5, 6 + 2, 1 + 8, 4 + 5, 6 + 3, 7 + 0] = 9,
, = (0, 0), (0, 1), (0, 2), (1, 0), (1, 1) atau (1, 2)
Untuk = 2, dan = 0, 1, 2 dan 3.
, max [0 + 4, 1 + 2, 4 + 0] = 4, , (0, 0) atau (1, 2)
, max[0 + 7, 2 + 4, 1 + 5, 4 + 2, 4 + 3, 6 + 0] = 7,
, (0, 0) atau (2, 0)
, max[0 + 9, 2 + 7, 4 + 4, 1 + 7, 4 + 5, 6 + 2, 4 + 5, 6 + 3, 8 + 0] = 9
, (0, 0), (0, 1), (1, 1), (2, 0) atau (2, 1)
, max[0 + 11, 2 + 9, 4 + 7, 6 + 4, 1 + 9, 4 + 7, 6 + 5, 7 + 2, 4 + 8, 6 + 5,
8 + 3, 9 + 0] = 12, , (2, 0)
Untuk = 3, dan = 0, 1, 2 dan 3.
, max [0 + 6, 1 + 4, 4 + 2, 6 + 0] = 6, , (0, 0), (2, 0) atau (3, 0)
, max[0 + 9, 2 + 6, 1 + 7, 4 + 4, 4 + 5, 6 + 2, 6 + 3, 8 + 0] = 9
xxix
, max[0 + 11, 2 + 9, 4 + 6, 1 + 9, 4 + 7, 6 + 4, 4 + 7, 6 + 5, 8 + 2, 6 + 5,
8 + 3, 10 + 0] = 11,
, (0, 0), (0, 1), (1, 1), (2, 0), (2, 1), (3, 0) atau (3, 1)
, max [0 + 13, 2 + 11, 4 + 9, 6 + 6, 1 + 11, 4 + 9, 6 + 7, 7 + 4, 4 + 9, 6 + 7,
8 + 5, 9 + 2, 6 + 8, 8 + 5, 10 + 3, 11 + 0] = 14, , (3, 0)
Tahap 1
Untuk = 3, dan = 3
, max [0 + 14, 1 + 11, 3 + 9, 6 + 6, 4 + 12, 5 + 9, 6 + 7, 7 + 4, 5 + 9, 6 + 7,
7 + 5, 8 + 2, 6 + 8, 7 + 5, 8 + 3, 9 + 0] = 16, , (1, 0)
Diperoleh , = 16, dengan , (1, 0).
Nilai optimal = 1, = 0, = 2, = 0, = 0, = 3.
Pada tahap 1, dialokasikan 1 unit mesin cetak tipe A dan 0 (tidak ada) mesin cetak tipe B pada perusahaan I. Dengan perolehan return sebesar Rp 4.000.000,00.
Pada tahap 2, dialokasikan 2 unit mesin cetak tipe A dan 0 (tidak ada) mesin cetak tipe B pada perusahaan II. Dengan perolehan return sebesar Rp 4.000.000,00.
Pada tahap 3, dialokasikan 0 (tidak ada) mesin cetak tipe A dan 3 unit mesin cetak tipe B pada perusahaan III. Dengan perolehan return sebesar Rp 8.000.000,00.
Sehingga total return yang diperoleh adalah sebesar:
xxx
3.2 Pengurangan Perhitungan dengan Metode Lagrange
Adapun langkah – langkah Metode pengali lagrange untuk menyelesaikan suatu permasalahan adalah sebagai berikut :
1. Misalkan terdapat persoalan pengalokasian modal dengan dua dimensi, yang dinyatakan dalam bentuk matematis sebagai berikut:
max , .
subject to
, , … , ; , , … , ,
, , … , ; , , … , 2. Memilih .
3. Menggunakan formulasi Program Dinamik untuk menyelesaikan permasalahan satu dimensi berikut :
max , .
subject to ,
, , … , ; , , … , ,
, , … , ; , , … ,
xxxi
satu. Misalkan terdapat solusi berbeda, maka dapat dinyatakan dengan
, , ..., , .
Jika ; adalah fungsi nilai optimal, maka hubungan rekurensnya adalah:
; max, ,…,
, …,
, ; .
Karena ; tidak bergantung pada , maka dapat dimisalkan
′ max
, ,…, , .
Dan ; sebagai fungsi nilai optimal menjadi:
; max, ,…, ; .
Kemudian menghitung
min,…,
Dan
max,…,
4. a. Jika ∑ untuk beberapa nilai , maka permasalahan dalam persamaan (3.15) dapat diselesaikan.
b. Jika , maka nilai dikurangi dan dilanjutkan ke langkah 2.
c. Jika , maka nilai ditambahkan dan dilanjutkan ke langkah 2.
d. Jika dan untuk setiap nilai , ∑ , maka
berhenti. Berarti prosedur metode pengali lagrange tidak dapat digunakan.
xxxii
Teorema 1 Jika , adalah solusi optimal untuk permasalahan dalam
persamaan (3.16) ,berarti solusi optimal juga untuk permasalahan dalam
persamaan (3.15) dengan diganti dengan ∑ .
Bukti:
Solusi fisibel untuk permasalahan dalam persamaan (3.15) adalah yang memenuhi kendala
∑ dan ∑ .
Andaikan , merupakan solusi fisibel untuk permasalahan dalam persamaan (3.15) dengan diganti dengan ∑ . Jelas bahwa , juga solusi fisibel untuk permasalahan dalam persamaan (3.16).
Sehingga, dengan optimalitas , diperoleh
, , .
Karena ∑ ∑ , diperoleh
, , .
Sehingga, , adalah solusi optimal untuk permasalahan dalam persamaan (3.15) dengan diganti dengan ∑ .
Dari pernyataan (4.b) dan (4.c) digunakan teorema sebagai berikut.
Teorema 2 Jika , maka .
Bukti:
Andaikan , , merupakan solusi optimal untuk
permasalahan dalam persamaan (3.16) dimana ∑ .
Dan andaikan , , merupakan solusi optimal untuk
permasalahan dalam persamaan (3.16) dimana ∑ .
xxxiii
, , .
, , .
Jika kedua pertidaksamaan di atas dijumlahkan, diperoleh
.
Karena , diperoleh
.
Secara interpretasi ekonomi, dari Teorema 2 dapat dimisalkan jika terdapat sejumlah modal yang ketersediaannya tidak terbatas dan price harus dilampirkan ke masing-masing unit modal. Berarti, price harus ditentukan sesuai dengan kemampuan yang dimiliki. Tentunya, jika price modal per unitnya naik maka semakin sedikit modal yang akan digunakan.
3.2.1 Contoh Kasus Aplikasi
Sama dengan contoh kasus aplikasi 3.1.2, permasalahannya dapat diselesaikan dengan menggunakan metode lagrange. Dengan mengikuti langkah-langkah sebagai berikut.
Memodelkan fungsi tujuan dan kendala
Maksimum
xxxiv Kendala ∶
, , ,
Pada prosedur pengali lagrange, langkah pertama yang dilakukan adalah melakukan perhitungan dengan memisalkan .
max , .
subject to ,
, , , ; , , ,
, , , ; , ,
Misalkan adalah nilai yang memaksimumkan fungsi ′ , dan adalah nilai yang memaksimumkan fungsi .
Proses perhitungan menggunakan persamaan (3.18) dan (3.19) yang disajikan dalam tabel berikut.
Tabel 3.2 Tabel Solusi Optimal Dengan
0 6 3 6 3 8 3
1 7 3 7 3 9 3
2 8 3 9 3 11 3
3 9 3 11 3 13 3
xxxv
0 8 0 14 0 12 0
1 9 1 15 0 atau 1 21 0 atau 1
2 11 2 17 0 atau 2 23 0
3 13 3 19 0 atau 3 25 0
Diperoleh solusi optimal = 0, = 3, = 3, = 3, dan = 0, = 3 dengan jumlah keuntungan sebesar 6 + 6 + 13 = 25.
Karena ∑ = 9, akibatnya ∑ , ∑ = 25 – 0 (9) = 25 = .
Tabel 3.4 Tabel Solusi Optimal Dengan
x
0 4,5 3 4,5 3 6,5 3
1 5,5 3 5,5 3 7,5 3
2 6,5 3 7,5 3 9,5 3
3 7,5 3 9,5 3 11,5 3
Tabel 3.5 Tabel Solusi Optimal Dengan
0 6,5 0 11 0 15,5 0
1 7,5 1 12 0 atau 1 16,5 0 atau 1
2 9,5 2 14 0 atau 2 18,5 0
3 11,5 3 16 0 atau 3 20,5 0
xxxvi
Karena ∑ = 9, akibatnya ∑ , ∑ = 25 – (9) = 20,5 =
.
Tabel 3.6 Tabel Solusi Optimal Dengan
0 3 3 3 3 5 3
1 4 0,1,2 atau 3 4 2 atau 3 6 3
2 5 0,1,2 atau 3 6 2 atau 3 8 3
3 6 0,1,2 atau 3 8 2 atau 3 10 3
Tabel 3.7 Tabel Solusi Optimal Dengan
0 5 0 8 0 11 0
1 6 1 9 0 atau 1 12 0 atau 1
2 8 2 11 0 atau 2 14 2
3 10 3 13 0 atau 3 16 0
Diperoleh solusi optimal = 0, = 3, = 3, = 3, dan = 0, = 3 dengan jumlah keuntungan sebesar 6 + 6 + 13 = 25.
Karena ∑ = 9, akibatnya ∑ , ∑ = 25 – 1 (9) = 16 = .
Tabel 3.8 Tabel Solusi Optimal Dengan
x ′1 1 ′2 2 ′3 3
0 1,5 3 1,5 3 3,5 3
1 4 0 3 2 4,5 3
2 5 0 5 2 6,5 3
xxxvii
Tabel 3.9 Tabel Solusi Optimal Dengan
x
0 3,5 0 5 0 6,5 0
1 4,5 1 6,5 1 9 1
2 6,5 2 8,5 2 10,5 1
3 8,5 3 10,5 3 12,5 1 Diperoleh solusi optimal = 1, = 0, = 2, = 2, dan = 0, = 3 dengan jumlah keuntungan sebesar 4 + 8 + 8 = 20.
Karena ∑ = 5, akibatnya ∑ , ∑ = 20 – (5) = 12,5 =
.
Tabel 3.10 Tabel Solusi Optimal Dengan
0 0 0 atau 3 0 0,1,2 atau 3 2 3
1 4 0 2 1 atau 2 3 1,2 atau 3
2 5 0 4 0,1 atau 2 5 1,2 atau 3
3 6 0 6 0,1 atau 2 7 1,2 atau 3
Tabel 3.11 Tabel Solusi Optimal Dengan
0 2 0 2 0 2 0
1 3 1 4 1 6 1
2 5 2 6 2 8 1
xxxviii
Diperoleh solusi optimal = 1, = 0, = 2, = 0, dan = 0, = 3 dengan jumlah keuntungan sebesar 4 + 4 + 8 = 16.
Karena ∑ = 3, akibatnya ∑ , ∑ = 16 –2 (3) = 10 = . Untuk telah memenuhi kendala persoalan awal, yaitu ∑ = 3 dan
∑ .
Tabel 3.12 Tabel Solusi Optimal Dengan
x ′ ′ ′
0 0 0 0 0 0,5 1 atau 3
1 4 0 1,5 1 2,5 1
2 5 0 4 0 4,5 1
3 6 0 6 0 6,5 1
Tabel 3.13 Tabel Solusi Optimal Dengan
x
0 0,5 0 0,5 0 0,5 0
1 2,5 1 2,5 0 4,5 1
2 4,5 2 4,5 0 atau 2 6,5 1
3 6,5 3 6,5 0,2 atau 3 8,5 1
Diperoleh solusi optimal = 1, = 0, = 2, = 0, dan = 0, = 3 dengan jumlah keuntungan sebesar 4 + 4 + 8 = 16.
Karena ∑ = 3, akibatnya ∑ , ∑ = 16 – (3) = 8,5 =
.
xxxix
x
0 0 0 0 0 0 0 atau 1
1 4 0 1 0 atau 1 2 0 atau 1
2 5 0 4 0 4 0 atau 1
3 6 0 6 0 6 0 atau 1
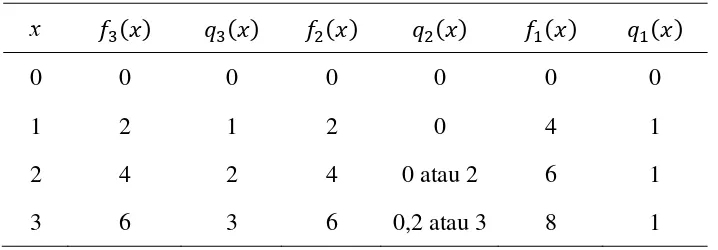
Tabel 3.15 Tabel Solusi Optimal Dengan
x
0 0 0 0 0 0 0
1 2 1 2 0 4 1
2 4 2 4 0 atau 2 6 1
3 6 3 6 0,2 atau 3 8 1
Diperoleh solusi optimal = 1, = 0, = 2, = 0, dan = 0, = 1 dengan jumlah keuntungan sebesar 4 + 4 + 3 = 11.
Karena ∑ = 1, akibatnya ∑ , ∑ = 11 – 3 (1) = 8 = .
Misalkan dan , , , .
xli
xlii
BAB 4
KESIMPULAN DAN SARAN
4.1. KESIMPULAN
Dari studi literatur ini dapat disimpulkan :
1. Pada prosedur pengali lagrange, harga modal per unit ditentukan dengan cara menerka. Sehingga perhitungan terus dilakukan sampai menemukan harga modal yang tepat untuk suatu permasalahan.
2. Jika harga modal per unit semakin besar maka semakin sedikit jumlah modal yang akan digunakan. Untuk harga modal tertentu, yang memenuhi prosedur pengali lagrange, semakin banyak jumlah sumber daya modal, maka semakin banyak jumlah keuntungan yang akan diperoleh.
4.2. SARAN
1. Penelitian yang dilakukan hanya membahas tentang pengalokasian sumber daya modal, bagi pembaca yang berminat mengembangkan lebih lanjut dapat mengaplikasikan perpaduan antara formulasi pemrograman dinamik dengan metode lagrange pada permasalahan-permasalahan lainnya.
2. Penelitian mengasumsikan harga modal per unit dengan cara menerka, sehingga membutuhkan proses yang panjang untuk menentukan harga yang tepat. Bagi peneliti selanjutnya, dapat memperhatikan dan mengembangkan prosedur pengali lagrange untuk lebih mudah mendapatkan harga sesuai dengan yang dibutuhkan.
xliii
DAFTAR PUSTAKA
Bronson, Richard. 1982. Theory and Problems of OPERATION RESEARCH. McGraw-Hill, Inc., USA.
Case, Karl E. and Fair, Ray C. 2007. Princples of Economics, 8th Edition. Pearson Education, Inc,. New Jersey.
Dreyfuse, Stuart E. and Law, Averill M. 1977. Mathematics In Science and Engineering: The Art and Theory of Dynamic Programming. ACADEMIC
PRESS, INC.
Hoffmann, Laurence D. and Bradley, Gerald R. 2010. Calculus: For Business, Economics, And The Social And Life Sciences, Brief Edition,Tenth Edition. McGraw- Hill Companies, Inc. New York.
Ilaboya I.R., Atikpo E., Ekoh G.O., Ezugwu M.O. and Umukoro L., 2011. Application of Dynamic Programming to Solving Reservoir Operational Problems. Journal of Applied Technology in Environmental Sanitation, 1 (3): 251-262.
Purcell, Edwin J. and Varberg Dale. 1987. Calculus With Analytic Geometri, 5th Edition. Prentice Hall, Inc.
Siagian, P. 2006. Penelitian Operasional: Teori dan Praktek. Jakarta: Penerbit Universitas Indonesia.
Sniedovich, Moshe. 2010. Dynamic Programming: Foundations and Principles, second edition. CRC Press London, New York.