SISTEM PERMODELAN PENUTUP BAK MOBIL OTOMATIS BERBASIS
MIKROKONTROLER ARDUINO
TUGAS AKHIR
Disusun Untuk Memenuhi Syarat Kelulusan Pada
Program Studi Strata Satu Sistem Komputer di Jurusan Teknik Komputer
Oleh
Muhammad Irwan Hidayat NIM 10209011
Pembimbing Sutono ,M.Kom
JURUSAN TEKNIK KOMPUTER
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
DAFTAR ISI
BAB I PENDAHULUAN ... Error! Bookmark not defined. 1.1 Latar Belakang ... Error! Bookmark not defined.
1.2 Maksud dan Tujuan ... Error! Bookmark not defined.
1.3 Batasan Masalah ... Error! Bookmark not defined.
1.4 Metode Penelitian ... Error! Bookmark not defined.
1.5 Sistematika Penulisan ... Error! Bookmark not defined. BAB II TEORI PENUNJANG... Error! Bookmark not defined. 2.1 Teori dasar Iklim ... Error! Bookmark not defined.
2.2 Teori dasar Embedded system ... Error! Bookmark not defined.
2.3 Perangkat keras ... Error! Bookmark not defined.
2.3.1 Sensor ... Error! Bookmark not defined.
2.3.2 Push Button ... Error! Bookmark not defined.
2.3.3 Motor Listrik ... Error! Bookmark not defined.
2.3.4 Mikrokontroler arduino uno ... Error! Bookmark not defined.
2.4 Perangkat Lunak Arduino ... Error! Bookmark not defined.
2.4.1Struktur Arduino ... Error! Bookmark not defined.
BAB III PERANCANGAN SISTEM... Error! Bookmark not defined. 3.1 Perancangan Perangkat Keras ... Error! Bookmark not defined.
3.1.1 Blok Diagram Sistem ... Error! Bookmark not defined.
3.1.2 Rangkaian Input ... Error! Bookmark not defined.
3.1.3 Mikrokontroler ATmega328 (arduino) ... Error! Bookmark not defined.
3.1.4 Driver motor ... Error! Bookmark not defined.
3.2 Perancangan perangkat lunak ... Error! Bookmark not defined.
3.2.1 Arduino software ... Error! Bookmark not defined.
3.2.2 Algoritma Alat ... Error! Bookmark not defined. BAB IV PENGUJIAN DAN ANALISIS... Error! Bookmark not defined. 4.1 Pengujian dan Analisa Perangkat Keras ... Error! Bookmark not defined.
4.1.1 Pengujian dan Analisa Modul alat ... Error! Bookmark not defined.
4.1.2 Pengujian dan analisa program Arduino ... Error! Bookmark not defined.
4.2 Pengujian dan Analisa Mekanik Alat ... Error! Bookmark not defined.
4.2.1 Pengujian driver motor ... Error! Bookmark not defined.
4.2.2Pengujian motor 1 dan 2 ... Error! Bookmark not defined.
4.3 Pengujian dan Analisa Algoritma ... Error! Bookmark not defined. BAB V KESIMPULAN DAN SARAN ... Error! Bookmark not defined. 5.1 Kesimpulan ... Error! Bookmark not defined.
5.2 Saran ... Error! Bookmark not defined.
DAFTAR PUSTAKA
DAFTAR PUSTAKA
[1]. Sumardi, Penangkar curah hujan automatis menggunakan mikrokontroler ATmega32, Jurnal Teknik Elektro, Volume 11, Nomor 2, Semarang, 2009
[2]. Malvino. (2001). Prinsip – Prinsip Elektronik, Edisi kedua. Jakarta: PT. Erlangga.
[3]. Pengenalan board arduino dapat diakses pada Http//:www.arduino.cc/en/Main/arduinoBoardUno
[4]. Budiharto, Widodo, Elektronika Digital dan Mikroprosesor, Penerbit Andi, Yogyakarta, 2005
[5]. Datasheet driver motor ems 2a dual h-bridge dapat di akses pada
http://www.innovativeelectronics.com/innovative_electronics/download_files/ma nual/EMS_2A_DHBridge.pdf.
[6]. www.academia.edu/5516315/PENGENALAN_AKTUATOR_DAN_PROSES_KERJAN YA_PADA_APLIKASI_PENGUKURAN_SUHU_SERTA_MENJALANKAN_AKTU ATOR_DENGAN_BANTUAN_SOSFTWARE_ARDUIN
[7]. Pengenalan embedded system dapat diakses pada
http://www.cs.ui.ac.id/id/staf/wisnuj/docs/book_embedded.pdf
[8]. http://techno.okezone.com/read/2013/05/31/56/815465/cuaca-tak-menentu-wajarkah diakses pada tanggal 23 september 2013
DAFTAR RIWAYAT HIDUP
Nama : Muhammad Irwan Hidayat Tempat, tanggal lahir : Sumedang, 13 Januari 1991 Jenis kelamin : Laki-laki
Agama : Islam
Alamat Sementara : Jalan Tubagus ismail dalam gang 1, no 28A/153A Alamat Tetap : Dusun Cipeuteuy ,RT 03/RW 06 ,Desa Cisitu
Kecamatan Cisitu, Sumedang No. telepon : 085794496468
Email : [email protected]
Pendidikan Formal
2009 – 2014 : Universitas Komputer Indonesia, Bandung. Fakultas Teknik dan Ilmu Komputer, Jurusan Teknik Komputer. 2006 – 2009 : SMA Negeri 1 Situraja - Sumedang
2003 – 2006 : SMP Negeri 1 Cisitu - Sumedang 2002 – 2003 : SD Negeri Margaluyu-Sumedang 1997– 2002 : SD Negeri pegadungan09 –Jakarta
KATA PENGANTAR
Bismillahirrahmaanirrahim
Assalamualaikum Wr. Wb.
Segala puji bagi Allah SWT, Pencipta dan Pemelihara alam semesta, shalawat serta salam semoga terlimpah bagi Muhammad SAW, beserta keluarga dan para pengikutnya yang setia hingga akhir masa.
Alhamdulillah atas rahmat Allah SWT, akhirnya penulis dapat menyelesaikan Tugas Akhir dengan judul “Sistem Permodelan Penutup Bak Mobil Otomatis
Berbasis Mikrokontroler Arduino “,meskipun proses belajar sesungguhnya tak akan pernah berhenti. Tugas akhir ini disusun untuk memenuhi syarat dalam meraih gelar sarjana pada Jurusan Teknik Komputer Fakultas Teknik dan Ilmu Komputer di Universitas Komputer Indonesia.
Tugas akhir ini sesungguhnya bukanlah sebuah kerja individual dan akan sulit terlaksana tanpa batuan orang-orang terdekat penulis terutama pembimbing yang selalu memberi masukan dan nasihat bagi penulis, tanpa beliau penulis tidak akan mungkin menyelesaikan tugas akhir ini. Penulis mengucapkan terima kasih pula kepada berbagai pihak-pihak yang telah memberikan dan bantuan pada pelaksanaan dan pembuatan tugas akhir ini. dengan segala kerendahan hati, Penulis mengucapkan terima kasih kepada ;
1. Kepada orang tua beserta keluarga besar penulis yang telah memberikan do’a,
dukungan, kasih sayang, dan motivasi, sehingga penulis dapat menyelesaikan tugas akhir ini.
2. Bapak Prof. Dr. H. Denny Kurniadie, Ir., M.Sc. selaku dekan Fakultas Jurusan Teknik dan Ilmu Komputer
3. Bapak Dr. Wendi Zarman,M.Si. selaku ketua Jurusan Teknik Komputer 4. Bapak Sutono.M,kom selaku pembimbing yang telah meluangkan waktu
5. Bapak Dr. Ir. Yeffry Handoko Putra, M.T. sebagai dosen wali 09 TK-1 6. Bapak dan Ibu seluruh staff dosen Jurusan Teknik Komputer yang telah
memberikan ilmu, motivasi dan bantuan kepada penulis
7. Teman-teman angkatan 2009 jurusan teknik komputer yang telah memberikan motivasi dan, masukan kepada penulis .
8. Rekan-rekan mahasiswa UNIKOM yang telah memberikan masukan Terima kasih sebanyak-banyaknya.
Penulis menyadari bahwa tugas akhir ini masih banyak sekali kekurangan oleh karena kebenara datangnya dari Allah SWT ,dan kesalahan datangnya dari penulis pribadi. Akhirnya, Penulis berharap semoga penelitian ini menjadi sumbangsih yang bermanfaat bagi dunia sains dan teknologi di Indonesia, khususnya disiplin keilmuan yang Penulis dalami.
Bandung 3 juli 2014
BAB I
PENDAHULUAN
1.1 Latar Belakang
Di tahun 2013, pemanasan global menjadi topik yang ramai dibicarakan.Bumi sebagai tempat tinggal manusia terus mengalami kenaikan temperatur udara. Menurut Thomas Djamaludin dari riset astronomi astrofisika LAPAN pemanasan yang terjadi pada wilayah perkotaan cenderung lebih panas dibanding kan daerah di sekitarnya, sering disebut juga sebagai fenomena pulau panas perkotaan (8).“Hal tersebut menjadikan cuaca di bumi lebih sulit diprediksikan atau belum bisa di tetapkan secara pasti”, menurut Kepala BMKG (9).
Mobil sebagai salah satu media pengantar barang menjadikan cuaca hujan sebagai hambatan dalam pada perjalanan. Mobil dengan bak terbuka seperti mobil truk, mobil pick up, truk pengangut semen yang bekerja mengangkut barang akan sangat terganggu dengan turunnya hujan yang tiba-tiba karena dapat menurunkan kualitas barang bawaan mereka.
Berdasarkan beberapa alasan di atas, penulis memiliki ide untuk membuat suatu model sistem tertanam (embedded system) berupa alat penutup atap mobil yang bekerja otomatis berdasarkan suhu, cuaca dan cahaya di sekitar mobil. Alat yang akan dibuat diharapkan mampu bekerja dalam kondisi mobil bergerak ataupun saat ditinggal pemilik (parkir).
1.2 Maksud dan Tujuan
Adapun tujuan yang hendak dicapai adalah :
1. Membuat alat berbasis sistem tertanam (embedded), 2. Mengaplikasikan hukum pegas pada mekanika sistem, 3. Mengetahui cara kerja dari sensor – sensor yang digunakan, 4. Memaksimalkan kerja motor dc sebagai aktuator,
Adapun manfaat yang ingin dicapai dengan adanya alat tersebut, yaitu :
2. Penulis dapat mengetahui kualitas sensor dan motor yang digunakan, 3. Mempermudah pekerjaan manusia,
4. Menjaga kualitas barang bawaan mobil.
1.3 Batasan Masalah
Masalah yang akan dikaji dan dibahas meliputi :
1. Penggunaan alat maksimal pada mobil pengangkut muatan terbuka , 2. Pengujian alat dilakukan dengan prototype (miniature),
3. Sistem bergantung pada kekuatan ACCU sebagai catu daya, 4. Pengukuran hanya dilakukan pada wilayah kota Bandung, 5. Memaksimalkan penggunaan bahasa tingkat tinggi , 6. Bahan tirai menggunakan bahan anti air.
1.4 Metode Penelitian
Metodologi penelitian yang penulis lakukan adalah eksperimental dengan tahapan sebagai berikut :
1 Studi literatur
Mencari referensi buku, jurnal website dalam upaya mencari berbagai komponen pendukung yang akan dipakai dalam perancangan tugas akhir ini.
2 Interview dan eksperimen
Mencoba berbagai modul rangkaian yang diperoleh dari studi literatur serta mendiskusikan hasil eksperimen dengan dosen pembimbing.
3 Perancangan
dengan motor, maupun dari sisi perangkat lunak dengan pembuatan program untuk mikrokontroler menggunakan software IDE arduino, sehingga tersusun sebuah sistem.
4 Pengujian kondisi
setelah selesai dilakukan penggabungan menjadi suatu sistem yang utuh maka alat akan diuji dan disesuaikan dengan beberapa kondisi yang ada di tempat pendeteksian (rumah).
5 Pembuatan kesimpulan
metode terakhir dimana pada metode ini akan dibuat kesimpulan dari hasil pengujian dan perbandingan yang telah dilakukan oleh alat yang sudah dibuat.
1.5 Sistematika Penulisan
Adapun sistematika penulisan pada tugas akhir ini adalah sebagai berikut
BAB I PENDAHULUAN
Dalah bab ini berisikan tentang latar belakang , maksud dan tujuan penulisan ,batasan masalah , metoda penulisan ,dan sistematika penulisan.
BAB II TEORI PENUNJANG
Dalam bab ini membahas tentang teori-teori dasar yang berhubungan dengan perangkat keras maupun lunak pembentuk alat serta sistem yang digunakan oleh alat.
BAB III PERANCANGAN SISTEM
Dalam bab ini membahas tentang diagram blok alat, perancangan perangkat keras dan perangkat lunak.pemilihan terhadap sensor sensor yang di gunakan untuk mendeteksi cahaya,kelembaban dan curah hujan yang nanti akan di ambil kesimpulan pada mikro yang dimana hasilnya akan menggerakan motor untuk menutup muatan.
BAB IV HASIL DAN ANALISA
BAB V. KESIMPULAN DAN SARAN
BAB II
TEORI PENUNJANG
Dalam bab ini akan dijelaskan mengenai teori-teori penunjang untuk membentuk sebuah modul (alat) penutup atap otomatis pada sebuah truk semen.Teori penunjang tersebut terdiri dari teori dasar hujan, teori perangkat keras dan teori perangkat lunak yang digunakan.
2.1 Teori dasar Iklim
Iklim adalah keadaan rata-rata cuaca pada suatu wilayah dalam jangka waktu yang relatif lama.Iklim juga didefinisikan sebagai berikut :
1. Sintesis kejadian cuaca selama kurun waktu yang panjang, yang secara statistik cukup dapat dipakai untuk menunjukkan nilai statistik yang berbeda dengan keadaan pada setiap saatny (World Climate Conference, 1979)
2. Konsep abstrak yang menyatakan kebiaasan cuaca dan unsur-unsur atmosfer di suatu daerah selama kurun waktu yang panjang (Glenn T. Trewartha, 1980)
3. Peluang statistik berbagai keadaan atmosfer, antara lain suhu, tekanan angin, kelembaban, yang terjadi di suatu daerah selama kurun waktu yang panjang (Gibbs, 1978).
2.2 Teori dasar Embedded system
Menurut Heath (2003), embedded system atau sistem tertanam adalah suatu sistem berbasis mikroprosesor yang dibuat untuk mengontrol fungsi-fungsi dan tidak dapat diprogram oleh end-user (pengguna). Definisi lain yang lebih sederhana dikemukakan oleh Noergaard (2005), bahwa embedded system adalah suatu sistem komputer terapan (applied computer system) yang berbeda dengan PC. Salah satu perbedaan yang mendasar adalah bahwa perangkat keras (hardware) yang digunakan atau fungsi perangkat lunak (software) yang tersedia dalam embedded system jauh lebih sedikit dibandingkan PC (Noergaard 2005).
Embedded System umumnya terdiri atas CPU/mikroprosesor dan antarmuka ke alat input/output (Axelson 2007). Fungsi dalam embedded system tidak dapat diubah atau ditambah lagi, maka umumnya embedded system hanya dibuat untuk tujuan khusus, dan hanya dapat mengerjakan satu pekerjaan dalam satu waktu (Heath 2003). Hal ini menjadi karakteristik utama dari suatu embedded system.
Beberapa contoh embedded system yang memiliki tujuan khusus dan spesifik adalah jam tangan digital, lift, dan lampu lalu lintas. Pada jam tangan digital,
mikroprosesor yang ada di dalamnya hanya bertugas menghitung perubahan waktu secara berkala dan menampilkannya pada layar. Pada lift, mikroprosesor di dalamnya bertugas untuk menerima dan memproses masukan perintah dari pengguna sehingga dapat mengendalikan lift menuju lantai yang diinginkan. Sebuah lampu lalu lintas juga memiliki sebuah mikroprosesor di dalamnya untuk menghitung lama waktu menyala dan mengendalikan masing-masing lampu lalu lintas secara teratur.
Embedded system sering kali membutuhkan sebuah perangkat lunak untuk mengoperasikannya. Perangkat lunak ini harus dapat disinkronisasi dengan komputer untuk memudahkan penggunaannya.
2.3 Perangkat keras
2.3.1 Sensor
Sensor adalah jenis tranduser yang digunakan untuk mengubah besaran mekanis, magnetis, panas, sinar, dan kimia menjadi tegangan dan arus listrik. Sensor sering digunakan untuk pendeteksian pada saat melakukan pengukuran atau pengendalian. Beberapa jenis sensor yang banyak digunakan dalam rangkaian elektronik antara lain sensor cahaya, sensor suhu, dan sensor hujan
2.3.1.1 Sensor Cahaya
Sensor cahaya adalah komponen elektronika yang dapat/berfungsi mengubah suatu besaran optik (cahaya) menjadi besaran elektrik. Sensor cahaya berdasarkan perubahan elektrik yang dihasilkan dibagi menjadi 2 jenis yaitu :
1. Photovoltaic : Yaitu sensor cahaya yang dapat mengubah perubahan besaran optik (cahaya) menjadi perubahan tegangan. Salah satu sensor cahaya jenis photovoltaic adalah solar cell.
2. Photoconductive : Yaitu sensor cahaya yang dapat mengubah perubahan besaran optik (cahaya) menjadi perubahan nilai konduktansi (dalam hal ini nilai resistansi). Contoh sensor cahaya jenis photoconductive adalah LDR, Photo Diode,Photo Transistor.
2.3.1.2 LDR (Light Dependent Resistor)
LDR salah satunya pada lampu penerangan jalan yang akan menyala otomatis pada saat cahaya matahari mulai redup.
Gambar 2. 1.simbol LDR
Prinsip kerja Resistansi Sensor Cahaya LDR (Light Dependent Resistor) akan berubah seiring den-gan perubahan intensitas cahaya yang mengenainya atau yang ada disekitarnya. Dalam keadaan gelap resistansi LDR sekitar 10MΩ dan dalam
keadaan terang sebesar 1KΩ atau kurang. LDR terbuat dari bahan semikonduktor
seperti kadmium sulfida. Dengan bahan ini energi dari cahaya yang jatuh menyebabkan lebih banyak mua-tan yang dilepas atau arus listrik meningkat. Artinya resistansi bahan telah mengalami penurunan.
2.3.1.3 Sensor Suhu
Sensor suhu adalah komponen elektronika yang memiliki fungsi untuk mengubah besaran suhu menjadi besaran listrik dalam bentuk tegangan. Sensor Suhu LM35 yang dipakai dalam penelitian ini berupa komponen elektronika elektronika yang diproduksi oleh National Semiconductor. LM35 memiliki keakuratan tinggi dan kemudahan perancangan jika dibandingkan dengan sensor suhu yang lain, LM35 juga mempunyai keluaran impedansi yang rendah dan linieritas yang tinggi sehingga dapat dengan mudah dihubungkan dengan rangkaian kendali khusus serta tidak memerlukan penyetelan lanjutan.
Meskipun tegangan sensor ini dapat mencapai 30 volt akan tetapi yang diberikan kesensor adalah sebesar 5 volt, sehingga dapat digunakan dengan catu daya tunggal dengan ketentuan bahwa LM35 hanya membutuhkan arus sebesar 60 µA hal ini berarti LM35 mempunyai kemampuan menghasilkan panas (self-heating) dari sensor yang dapat menyebabkan kesalahan pembacaan yang rendah yaitu kurang dari 0,5 ºC
Sensor suhu LM35 memiliki karakteristik sebagai berikut :
1. Memiliki sensitivitas suhu, dengan faktor skala linier antara tegangan dan suhu 10 mVolt/ºC, sehingga dapat dikalibrasi langsung dalam celcius.
2. Memiliki ketepatan atau akurasi kalibrasi yaitu 0,5ºC pada suhu 25 ºC seperti terlihat pada gambar 2.2.
3. Memiliki jangkauan maksimal operasi suhu antara -55 ºC sampai +150 ºC.
4. Bekerja pada tegangan 4 sampai 30 volt. 5. Memiliki arus rendah yaitu kurang dari 60 µA.
6. Memiliki pemanasan sendiri yang rendah (low-heating) yaitu kurang dari 0,1 ºC
pada udara diam.
7. Memiliki impedansi keluaran yang rendah yaitu 0,1 W untuk beban 1 mA.
8. Memiliki ketidaklinieran hanya sekitar ± ¼ ºC.
Gambar 2. 2. Sensor Suhu LM35
2.3.1.4 Sensor hujan
,
Gambar 2. 3.plat tembaga pada sensor hujan
Plate berlik- liku bertujuan ketika air jatuh pada plat tembaga maka otomatis jalur akan terhubung dan mengalirkan arus karena sifat air adalah penghantar listrik.
2.3.2 Push Button
Dalam dunia industri terdapat berbagai macam jenis-jenis mesin dengan cara kerja yang berbeda-beda dan fungsi yang berbeda pula sehingga menghasilkan output
atau hasil yang bervariasi, untuk menggerakan suatu mesin diperlukan suatu alat yang sangat banyak jenis dan ragamnya, salah satunya adalah Push Button atau saklar tekan.Pada Push Button (PB), terdapat kontak-kontaknya, yang berupa normaly close
(NC) dan normaly open (NO), atau ada juga PB yang memiliki jumlah kontak lebih banyak.
Push Button atau dalam bahasa Indonesianya yaitu saklar tekan yang artinya alat ini akan bekerja dengan cara ditekan, alat ini sangat umum, banyak digunakan diberbagai mesin baik itu diindustri ataupun diinstansi pendidikan lainnya, alat ini juga paling mudah untuk dipelajari atau dipahami karena fungsi dan cara kerjanya yang sangat sederhana, pada bagian atasnya terdapat knop yang berfungsi sebagai area penekan (warna merah), lalu disamping kiri dan kanan terdapat terminal, kontak
Gambar 2. 4. push button
2.3.2.1 Limit Switch
Limit switch merupakan jenis saklar yang dilengkapi dengan katup yang berfungsi menggantikan tombol. Prinsip kerja limit switch sama seperti saklar Push ON yaitu hanya akan menghubung pada saat katupnya ditekan pada batas penekanan tertentu yang telah ditentukan dan akan memutus saat saat katup tidak ditekan. Limit switch termasuk dalam kategori sensor mekanis yaitu sensor yang akan memberikan perubahan elektrik saat terjadi perubahan mekanik pada sensor tersebut. Penerapan dari limit switch adalah sebagai sensor posisi suatu benda (objek) yang bergerak.
Gambar 2. 5.Limit switch
2.3.3 Motor Listrik
Motor listrik termasuk kedalam kategori mesin listrik dinamis dan merupakan sebuah perangkat elektromagnetik yang mengubah energi listrik menjadi energi mekanik. Energi mekanik ini digunakan untuk, misalnya, memutar impeller pompa,
fan atau blower, menggerakan kompresor, mengangkat bahan, dll di industri dan digunakan juga pada peralatan listrik rumah tangga (seperti: mixer, bor listrik,kipas angin).Dalam memahami sebuah motor listrik, penting untuk mengerti apa yang dimaksud dengan beban motor. Beban mengacu kepada keluaran tenaga putar/torsi sesuai dengan kecepatan yang diperlukan. Beban umumnya dapat dikategorikan kedalam tiga kelompok:
Beban torsi konstan, adalah beban dimana permintaan keluaran energinya bervariasi dengan kecepatan operasinya, namun torsi nya tidak bervariasi
Beban dengan torsi variabel, adalah beban dengan torsi yang bervariasi dengan kecepatan operasi.
Beban dengan energi konstan, adalah beban dengan permintaan torsi yang berubah dan berbanding terbalik dengan kecepatan
2.3.3.1 Motor DC
Motor DC/arus searah, sebagaimana namanya, menggunakan arus langsung yang tidak langsung/direct-unidirectional. Motor DC digunakan pada penggunaan khusus dimana diperlukan penyalaan torsi yang tinggi atau percepatan yang tetap untuk kisaran kecepatan yang luas.sebuah motor DC yang memiliki tiga komponen utama ;
1. Kutub medan
2. Dinamo
3. Kommutator
pada umumnya dibatasi untuk beberapa penggunaan berkecepatan rendah, penggunaan daya rendah hingga sedang, seperti peralatan mesin dan rolling mills,
sebab sering terjadi masalah dengan perubahan arah arus listrik mekanis pada ukuran yang lebih besar. Juga, motor tersebut dibatasi hanya untuk penggunaan di area yang bersih dan tidak berbahaya sebab resiko percikan api pada sikatnya. Motor DC juga relatif mahal dibanding motor AC.
Gambar 2. 6. Motor DC
Motor DC memerlukan suplai tegangan yang searah pada kumparan medan untuk diubah menjadi energi mekanik. Bagian utama motor DC adalah statos dan rotor dimana kumparan medan pada motor dc disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar). Bentuk motor paling sederhana memiliki kumparan satu lilitan yang bisa berputar bebas di antara kutub-kutub magnet permanen. Catu tegangan dc dari baterai menuju ke lilitan melalui sikat yang menyentuh komutator, dua segmen yang terhubung dengan dua ujung lilitan. Kumparan satu lilitan pada gambar di atas disebut angker dinamo. Angker dinamo adalah sebutan untuk komponen yang berputar di antara medan magnet.
2.3.4 Mikrokontroler arduino uno
yang mempunyai fasilitas yang lengkap.Atmega328 ini dianggap penulis akan dapat dimaksimalkan dalam pembuatan program dan pengontrolan motor.
ArduinoUno adalah board berbasis mikrokontroler pada ATmega328 .Board ini memiliki 14 digital input / output pin (dimana 6 pin dapat digunakan sebagai output PWM), 6 input analog, 16 MHz osilator kristal, koneksi USB, jack listrik tombol reset. Pin-pin ini berisi semua yang diperlukan untuk mendukung mikrokontroler, hanya terhubung ke komputer dengan kabel USB atau sumber tegangan bisa didapat dari adaptor AC to DC atau baterai untuk menggunakannya.
Gambar 2. 7. ilustrasi board arduino uno
Board Arduino Uno memiliki fitur-fitur baru sebagai berikut :
1. 1,0 pinout: tambah SDA dan SCL pin yang dekat ke pin aref dan dua pin baru lainnya ditempatkan dekat pin RESET, dengan IO REF yang memungkinkan sebagai
buffer untuk beradaptasi dengan tegangan yang disediakan dari board sistem. Pengembangannya, sistem akan lebih kompatibel dengan Prosesor yang menggunakan AVR, yang beroperasi dengan 5V dan dengan Arduino yang beroperasi dengan 3.3V. Kedua adalah pin tidak terhubung, yang disediakan untuk tujuan pengembangannya.
2. Tombol reset
Mikrokontroller ATmega328
output, menggunakan fungsi pinMode, digitalWrite, dandigitalRead. Tegangan operasi sebesar 5 voltuntuk nilai High(1)dan 0 volt untuk nilai Low(0). Setiap pin dapat memberikan atau menerima maksimum 40 mA dan memiliki internal resistor
pull-up (yang terputus secara default) sebesar 20-50 kOhms. Selain itu, beberapa pin memiliki fungsi-fungsi khusus sebagai berikut
5. LED: Pin 13. Terdapat LED yang disediakan dan terhubung ke pin digital 13.LED menyala jika pin 13 bernilai High, dan LED mati jika pin bernilai LOW.
Arduino Uno memiliki 6 masukan analog, yang masing-masing memiliki resolusi 10 bit (yaitu 1024 nilai yang berbeda). Tegangan default pengukuran dari 0 sampai 5 volt, dapat pula diatur untuk jangkauan pengukuran menggunakan pin AREF dan fungsi analog Reference (). Selain itu, beberapa pin memiliki spesialisasifungsi:
1. I2C: 4 (SDA) dan 5 (SCL). Dukungan komunikasi I2C (TWI) menggunakan wire library.Ada beberapa pin lainnya pada board:· AREF. Tegangan referensi untuk input analog. Digunakan dengan analogReference.· Reset. Bawa garis LOW ini untuk me-reset mikrokontroler. Biasanya digunakan untuk menambahkan tombol reset untuk melindungi yang diblok pada board.
2. Tombol RESET
2.3.4.2 Catu daya
Arduino Uno dapat diaktifkan melalui koneksi USB atau dengan catu daya eksternal. Sumber listrik dipilih secara otomatis. Eksternal (non-USB) daya dapat datang baik dari AC to DC adaptor atau baterai. Adaptor ini dapat dihubungkan dengan cara menghubungkan Jack2.1mm ke dalam board colokan listrik. Lead dari baterai dapat dimasukkan ke dalam header pin Gnd dan Vin dari konektor Power.
Board dapat beroperasi pada pasokan daya dari 6 - 20 volt. Jika diberikan tegangan kurang dari 7V, pin 5V akan menyuplai tegangan kurang dari 5 volt dan board
mungkin tidak stabil. Jika menggunakan lebih dari 12V, regulator tegangan bisa panas dan merusak board. Rentang yang dianjurkan adalah 7 - 12 volt.
Pin catu daya adalah sebagai berikut:
2. Pin 5V. Catu daya diatur digunakan untuk daya mikrokontroler dan komponen lainnya di board. Hal ini dapat terjadi baik dari VIN melalui regulator onboard, atau diberikan oleh USB .
3. Pin 3,3 volt pasokan yang dihasilkan oleh regulator on-board. Arus maksimum yang digunakan sebesar 50 mA.
4. GND
2.3.4.3 Memory
ATmega328 memiliki kapasitas memori 32 KB dan digunakan sebesar 0,5 KB untuk loading file.
2.3.4.4 Komunikasi
Arduino Uno memiliki sejumlah fasilitas untuk berkomunikasi dengan komputer, Arduino lain, atau mikrokontroler lain. ATmega328 ini menyediakan UART TTL (5V) komunikasi serial, yang tersedia pada pin digital 0 (RX) dan 1 (TX). Sebuah ATmega16U2 pada saluran board ini komunikasi serial melalui USB dan muncul sebagai com port virtual untuk perangkat lunak pada komputer. Firmware Arduino menggunakan USB driver standar COM, dan tidak ada driver eksternal yang dibutuhkan. Namun, pada Windows, file. Inf diperlukan. Perangkat lunak Arduino termasuk monitor serial yang memungkinkan data sederhana yang akan dikirim ke
board Arduino. RX dan TX LED di board akan berkedip ketika data sedang dikirim melalui chip USB-to-serial dan koneksi USB ke komputer. ATmega328 ini juga mendukung komunikasi I2C (TWI) dan SPI. Fungsi ini digunakan untuk melakukan komunikasi inteface pada sistem.
2.3.4.5 Programing
menggunakan chip Atmel AVR, software yang berupa bahasa pemrograman standar C, serta bootloader yang dipasang pada chip utama.
Arduino Uno dapat diprogram dengan perangkat lunak Arduino.pertama pilih Arduino Uno dari Tool lalu sesuaikan dengan mikrokontroler yang digunakan. ATmega328 pada Uno Arduino memiliki bootloader yang memungkinkan Anda untuk meng-upload program baru tanpa menggunakan downloader eksternal. Komunikasi menggunakan protokol dari bahas C. Sistem dapat menggunakan perangkat lunak FLIP Atmel (Windows) atau programmer DFU (Mac OS X dan Linux) untuk memuat firmware baru. Atau Anda dapat menggunakan header ISP dengan programmer eksternal.
2.4 Perangkat Lunak Arduino
Perangkat lunak Arduino yang akan digunakan adalah driver dan IDE,. IDE Arduino adalah perangkat yang sangat canggih ditulis dengan menggunakan Java. IDE Arduino terdiri dari:
1. Editor program, sebuah window yang memungkinkan pengguna menulis dan mengedit program dalam bahasa Processing.
2. Compiler, sebuah modul yang mengubah kode program (bahasa Processing) menjadi kode biner. Bagaimanapun sebuah mikrokontroler tidak akan bisa memahami bahasa Processing. Yang bisa dipahami oleh mikrokontroler adalah kode biner. Itulah sebabnya compiler diperlukan dalam hal ini.
3. Uploader, sebuah modul yang memuat kode biner dari komputer ke dalam
memory di dalam papan Arduino.
Sebuah kode program Arduino umumnya disebut dengan istilah sketch. Kata
“sketch” digunakan secara bergantian dengan “kode program” dimana keduanya
memiliki arti yang sama.
Lingkungan open-source Arduino memudahkan untuk menulis kode dan
Berikut merupakan tampilan perangkat lunak IDE arduino,
Gambar 2. 8.perangkat lunak IDE arduino
Berikut ini adalah contoh tampilan IDE Arduino dengan sebuah sketch yang sedang diedit,
2.4.1 Struktur Arduino
Struktur bahasa pemograman Arduino hanya terdiri dari dua bagian ;
Void setup()
{
// Statement pada struktur program statement hanya di eksekusi satu kali
}
Void loop()
{ pada struktur ini program akan di eksekusi terus menerus sampai menemukan tujuan program.
// Statement
}
2.4.1.1 Void Setup()
Fungsi setup() hanya dipanggil satu kali ketika program pertama kali di jalankan. Ini digunakan untuk mendifinisikan mode pin atu memulai komunikasi serial. Fungsi setup() harus di ikut sertakan dalam program walaupun tidak ada statement yang di jalankan.
void setup()
{
pinMode(3,OUTPUT);// men-set “pin” 3 sebagai Output
pinMode(6, INPUT); // men-set pin 6 sebagai Input
}
pinMode() = berfungsi untuk mengatur fungsi sebuah pin sebagai
INPUT atau OUTPUT.
Serial.begin(9600) = digunakan untuk mengaktifkan fitur UART dan
menginisialisasinya.
2.4.1.2 Void Loop()
Setelah melakukan fungsi setup() maka secara langsung akanmelakukan fungsi loop() secara berurutan dan melakukan instruksi-instruksiyang ada dalam fungsi loop().
void setup()
{
pinMode(3,OUTPUT);// men-set “pin” 3 sebagai Output
pinMode(6, INPUT); // men-set pin 6 sebagai Input
Serial.begin(9600);
}
void loop()
{
If (digitalRead(6)==HIGH)// membaca input digital pin 6
{
xstart = millis(); //aktifkan timer
digitalWrite (3, HIGH); // nyalakan pin 3
digitalWrite(3, LOW); // matikan pin 3
}
}
Berikut ini adalah elemen bahasa C yang dibutuhkan untuk format penulisan.
//(komentar satu baris)
Kadang diperlukan untuk memberi catatan pada diri sendiri apa arti dari kode-kode yang dituliskan. Cukup menuliskan dua buah garis miring dan apapun yang kita ketikkan dibelakangnya akan diabaikan oleh program.
/* */(komentar banyak baris)
Jika anda punya banyak catatan, maka hal itu dapat dituliskan pada beberapa baris sebagai komentar. Semua hal yang terletak di antara dua simbol tersebut akan diabaikan oleh program.
{ }(kurung kurawal)
Digunakan untuk mendefinisikan kapan blok program mulai dan berakhir (digunakan juga pada fungsi dan pengulangan).
;(titik koma)
Setiap baris kode harus diakhiri dengan tanda titik koma (jika ada titik koma yang hilang maka program tidak akan bisa dijalankan).
Program sangat tergantung pada pengaturan apa yang akan dijalankan berikutnya, berikut ini adalah elemen dasar pengaturan (banyak lagi yang lain dan bisa dicari di internet).
if..else, dengan format seperti berikut ini:
else if (kondisi) { }
else { }
Dengan struktur seperti diatas program akan menjalankan kode yang ada di dalam kurung kurawal jika kondisinya TRUE, dan jika tidak (FALSE) maka akan diperiksa apakah kondisi pada else if dan jika kondisinya FALSE maka kode pada else yang akan dijalankan.
for, dengan format seperti berikut ini:
for (int i = 0; i < #pengulangan; i++) { }
Digunakan bila anda ingin melakukan pengulangan kode di dalam kurung kurawal beberapa kali, ganti #pengulangan dengan jumlah pengulangan yang diinginkan. Melakukan penghitungan ke atas dengan i++ atau ke bawah dengan i–.
2.4.2 Otomatis software reset
BAB III
PERANCANGAN SISTEM
3.1 Perancangan Perangkat Keras
3.1.1 Blok Diagram Sistem
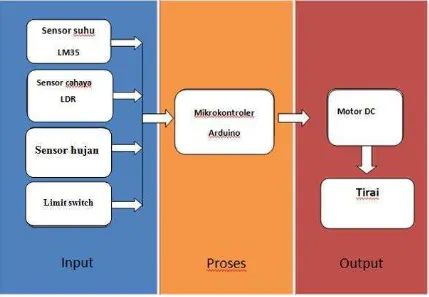
Pada Perancangan tugas akhir ini terdapat blok diagram yang akan di rancang berikut blok diagram secara keseluruhan ;
Pada bagian input terdapat beberapa sensor yang dimana tahap ini sensor-sensor yang dipasang pada bagian-bagian sisi dan atap mobil akan mendeteksi keadaan cuaca sekitar kendaraan seperti contoh sensor hujan yang diletakan pada bagian atap depan mobil truk, dimana ketika ada turunnya hujan sensor ini akan mengirimkan informasi pada mikrokontroler. Dimana informasi yang telah di dikirimkan akan diproses pada mikrokontroler dengan menggunakan algoritma arduino.
Gambar 3. 2. Blokdiagram input sensor
3.1.2 Rangkaian Input
3.1.2.1 Rangkaian Sensor hujan
Sensor hujan bisa juga disebut sensor air ,fungsi dari sensor ini adalah mendeteksi adanya air .sensor ini menggunakan panel sebagai detector atau pendeteksi airnya.Cara kerja dari sensor hujan ini pada saat air hujan mengenai panel sensor, maka akan terjadi proses elektrolisasi oleh air hujan tersebut karena air hujan termasuk kedalam cairan elektrolit yaitu cairan yang dapat menghantarkan arus listrik,meskipun sangat kecil dan proses ini akan menyebabkan keadaan aktif yang akan mengaktifkan relay.
Gambar 3. 3. Skematik sensor hujan
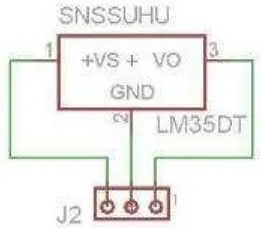
3.1.2.2 Rangkaian Sensor suhu LM35
LM35 adalah komponen sensor suhu berukuran kecil seperti transistor(TO92).Sensor suhu ini mampu mengukur suhu sari 0 derajat sampai 100 derajat celcius. Pemilihan sensor ini didasarkan karena LM35 memiliki tegangan keluaran yang terskala linear dengan suhu terukur ,yakni 10mv per 1 derajat celcius, Maka komponen ini sangat cocok untuk digunakan sebagai aplikasi-aplikasi seperti thermometer ruangan, atau thermometer badan digital. LM35 dapat disuplai dengan tegangan mulai 4V-30V DC dengan arus penggunaan 60 mikroampere.
ATmega 328.Pengolahan data dari hasil keluaran sensor dinilai mudah karena hanya membutuhkan program pengambilan nilai ADC jika dibandingkan dengan sensor suhu yang sebelumnya penulis pakai yaitu DS1620 yang memiliki karakteristik mirip seperti LM35.
Gambar 3. 4 rangkaian LM35
3.1.2.3 Rangkaian Sensor Cahaya LDR
LDR adalah suatu bentuk komponen yang mempunyai perubahan resistansi yang besarnya tergantung pada cahaya. Resistansi LDR akan berubah seiring dengan perubahan intensitas cahaya yang mengenainya atau yang ada disekitarnya. Dalam keadaan gelap resistansi LDR sekitar 10MΩ dan dalam keadaan terang sebesar 1KΩ atau kurang. LDR terbuat dari bahan semikonduktor seperti kadmium sulfida. Dengan bahan ini energi dari cahaya yang jatuh menyebabkan lebih banyak muatan yang dilepas atau arus listrik meningkat yang artinya resistansi bahan telah mengalami penurunan.
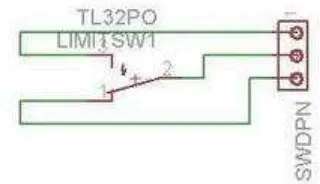
3.1.2.4 Limit Switch
Limit Switch merupakan sebuah komponen jenis saklar yang dilengkapi dengan katup yang berfungsi menggantikan tombol.sensor ini bekerja dengan cara bersentuhan dengan objek yang diukur. Limit switch dapat difungsikan sebagai normally open atau
normally close, kondisi awal rangkaian dalam keadaan terhubung ,sehingga ketika saklar tersebut ditekan membuat rangkaian terputus. Disini limit switch diletakan pada 2 posisi yaitu di kedua ujung rantai yang ketika telah ditekan akan menginformasikan untuk menghentikan pergerakan motor. Limit switch memberikan tegangan 5 volt DC (logika
‘1’) dan 0 volt DC (logika’0’).
Gambar 3. 6. Rangkaian Limit Switch
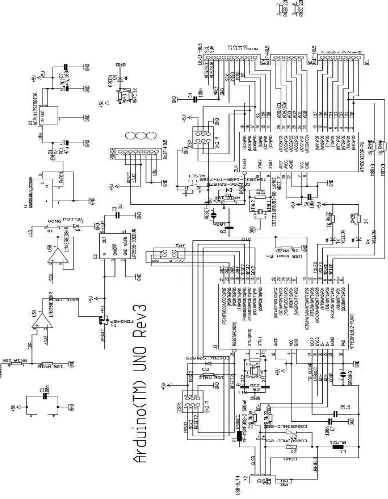
3.1.3 Mikrokontroler ATmega328 (arduino)
Gambar 3. 7. Rangkaian minimum Arduino uno
didapat dari sensor akan di proses menggunakan bahasa tingkat tinggi arduino untuk menyimpulkan apakah data yang telah masuk menunjukan terjadi turun hujan atau tidak. Apabila data yg telah masuk menunjukan terjadinya hujan maka mikrokontroler akan mengirim perintah untuk menggerakan motor.
Gambar 3. 8.Papan Arduino uno Konfigurasi pin arduino sebagai berikut ;
Tabel III. 1 Pengaturan pin arduino
Pin Deskripsi Jenis Pin Deskripsi Jenis
0 Rx - 7 SwitchBuka-tutup manual Input 1 Tx - 8 Switch Batas Buka Tirai Input 2 - - 9 Switch Batas Tutup Tirai Input 3 - - 10 Input Motor-2 Kiri Output 4 - - 11 Input Motor-2 Kanan Output 5 PWM enable Motor
DC -2
Output 12 Input Motor-1 Kiri Output
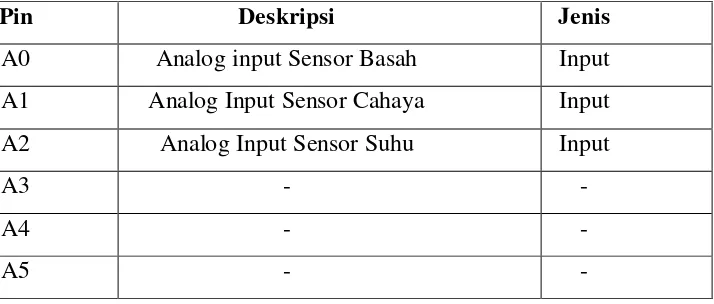
Tabel III. 2 Tabel pengaturan pin analog Arduino
Pin Deskripsi Jenis
A0 Analog input Sensor Basah Input A1 Analog Input Sensor Cahaya Input A2 Analog Input Sensor Suhu Input
A3 - -
A4 - -
A5 - -
Tabel konfigurasi pin arduino dan tabel pengaturan pin analog arduino (III.1 dan III.2)merupakan konfigurasi pemakaian I/O pada mikrokontroler ATmega328 pada modul alat. Tabel ini akan digunakan untuk mempermudah pembuatan program pada modul alat.
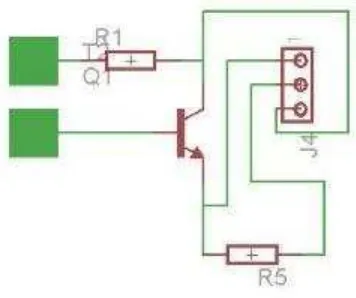
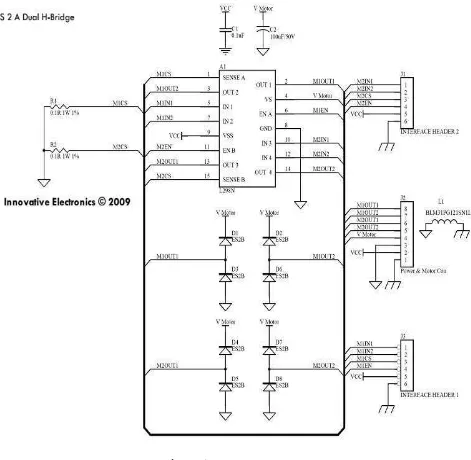
3.1.4 Driver motor
Motor DC tidak dapat dikendalikan secara langsung oleh mikrokontroler, karena kebutuhan arus listrik yang besar pada motor DC sedangkan arus keluaran pada mikro sangat kecil. Driver motor merupakan pilihan alternatif yang harus digunakan untuk mengendalikan motor DC pada mekanik penarik tirai. Ada beberapa driver motor yang sering digunakan pada aplikasi aplikasi mekanik, yaitu menggunakan rangkaian H-Bridge transistor, H-Bridge MOSFET, dan IC driver motor. Pada alat yang akan dirancang driver motor yang digunakan adalah Driver motor EMS 2 A dual H-bridge
tegangan TTL maupun CMOS . Tiap H-Bridge dilengkapi dengan sensor arus beban yang dapat digunakan sebagai umpan balik ke pengendali. Modul ini mampu menggerakkan beban-beban induktif seperti misalnya relay, solenoide, motor DC , motor stepper, dan berbagai macam beban lainnya. Modul ini memiliki jalur catu daya input (VCC) terpisah dari jalur catu daya untuk beban (VMot) dan dilengkapi dengan diode eksternal untuk pengaman beban induktif. Skematik driver dapat dilihat pada gambar dibawah;
.
Modul H-Bridge memiliki 2 buah header(Interface Header 1dan nterface Header 2)dan 1 set konektor ( Power & Motor Con).Koneksi modul H-bridge untuk 2 buah motor penggerak utama dapat dilihat pada Gambar berikut ;
Gambar 3. 9 Koneksi H-Bridge untuk 2 motor
3.2 Perancangan perangkat lunak
3.2.1 Arduino software
menghasilkan file program. Bedanya kesemua IDE tersebut menghasilkan program dari kode bahasa C (dengan GNU GCC) sedangkan Arduino Software (Arduino IDE) menghasilkan file hex dari baris kode yang dinamakan sketch.
Gambar 3. 10. Arduino software
Pada gambar 3.9 merupakan tampilan pada perangkat lunak arduino yang akan di aplikasikan pada alat yang akan dirancang.
3.2.2 Algoritma Alat
Gambar 3.10 Flowchart algoritma alat
Tabel IV. 1 penjelasan flowchart
Flowchart Deskrisi
Start Memulai menyalakan alat
Pengaturan awal Bisa di sebut Inisialisasi awal alat dimana kondisi alat sedang memuat setiap bagian
alat
Ambil data sensor dan ambil data saklar buka-tutup
Yaitu mengambil data yang telah peroleh sensor
Data 10 Pemeriksaan kondisi apakah data telah mencapai data ke 10
Basah,gelap,suhu<=27,5 Yaitu pemeriksaan kondisi yang terjadi pada tiap-tiap sensor apakah data yang di
peroleh kurang dari batas minimum
Saklar buka tutup aktif Merupakan pemeriksaan kondisi saklar buka tutup aktif atau tidak
Buka tirai Merupakan kondisi motor bekerja membuka tirai
Tutup tirai Merupakan kondisi motor bekerja menutup tirai
Pada diagram alur diatas menjelaskan tentang alur kerja algoritma yang telah dirancang pada alat, yang langkah langkah prosesnya adalah sebagai berikut
1. Mikro akan melakukan inisialisasi awal,
BAB IV
PENGUJIAN DAN ANALISIS
Pada bab ini akan dibahas secara keseluruhan pengujian dan analisa dari pembuatan sistem permodelan penutup bak truk otomatis menggunakan Arduino pada bak mobil truk.Pengujian dan analisis sistem meliputi pengujian dan analisis perangkat keras, pengujian dan analisis perangkat lumak dari data hasil percobaan.
4.1 Pengujian dan Analisa Perangkat Keras
Analisa pada perangkat keras dibagi menjadi 2 bagian utama, yaitu modul alat dan modul mekaniknya.modul alat sendiri terdiri dari modul alat yaitu arduino uno, sensor hujan,sensor cahaya,dan sensor suhu.Sementara modul mekanik terdiri dari motor dan mekanik truk.
4.1.1 Pengujian dan Analisa Modul alat
Pada modul alat akan diuji beberapa rangkaian seperti rangkaian sensor hujan/sensor kelembapan , rangkaian sensor suhu, rangkaian sensor cahaya. Berikut merupakan foto dari rangkaian keseluruhan modul sensor setelah menyatukan berbagai alat rangkaian sensor yang telah dibuat.
Gambar 4. 1 Modul sensor Sensor hujan
Sensor LDR
4.1.1.1 Pengujian dan Analisa Sensor
4.1.1.2 Pengujian sensor hujan
Pada alat yang dibuat sensor kelembapan yang dipakai berfungsi untuk mendeteksi ada atau tidaknya air hujan. Mula-mula sensor kelembapan diberi tegangan sebesar ± 5V. Pengujian dilakukan dengan cara meneteskan air pada papan sensor, lalu dilakukan pengukuran pada tegangan keluarannya sebelum dan sesudah ditetesi air.
Pengujian I diambil pada siang hari pukul 11.30-11.35,pada tanggal 10/06/2014
Tabel IV. 1.Pengujian sebelum ditetesi air Percobaan Tegangan Output(V)
1 3.56
Tabel IV. 2.Pengujian setelah ditetesi air
Percobaan Tegangan Output(V)
1 0.46
Pengujian II diambil pada malam hari pukul 19.00-19.10 pada tanggal 10/06/2014
Tabel IV. 3. Pengujian malam hari
Percobaan Tegangan Output(V)
2 1.47
3 1.50
4 1.63
5 1.73
Rata-rata 1.522
Tabel pengujian diatas beberapa percobaan dan kondisi diambil masing-masing lima data secara acak lalu diambil rata-rata dari data percobaan yang telah dilakukan. Data yang diambil merupakan data real yang diambil pada waktu setempat dengan tergangan input yaitu 4.5v .Dari tabel pengujian pertama bisa dilihat ,rata-rata tegangan yaitu 3,55V jika di hitung persentase air yang jatuh maka akan di dapat data sekitar 77% ,karena data diatas 30% artinya bahwa plate sensor air masih belum mendeteksi adanya air dan sensor masih bernilai 1 (high).Pada percobaan tabel ke II dilakukan pengujian dengan menetesi air pada plate sensor,dan dari data yang didapat persentase kering menurun dibanding pada tabel I, data rata-rata pada tabel II menunjukan bahwa tegangan keluaran 0.528V ,dan jika di hitung secara manual maka persentase akan dibawah data minimum .Berdasarkan data tersebut maka sensor bernilai 0(low) karena dibawah 30%.
Pada tabel IV.3 diambil pada malam hari dan cuaca sekitar masih gerimis dari rata-rata data yang telah didapat menujukan bahwa persentase tegamgan sensor hujan berada dibawah 0% yang berarti sensor bernilai 0 (low).
Perhitungan persentase yang diperoleh dapat di hitung secara manual dengan rumus
%
Perhitungan diambil dari rata-rata pengujian I
Dari analisis diatas dapat diketahui bahwa sensor hujan bekerja dengan sangat baik untuk mendeteksi adanya air atau tidak.
4.1.1.3 Pengujian sensor cahaya
Pengujian pada sensor ini dilakukan dengan cara mengambil data cahaya secara real pada waktu-waktu yang telah ditentukan. Tujuan dari pengambilan data yaitu untuk mengetahui tegangan keluaran yang dihasilkan oleh sensor dan. Berikut tabel hasil pengujian.
Pengujian I Pengujian I diambil pada siang hari pukul 11.30-11.35,pada tanggal 10/06/2014 dengan tegangan input yaitu 4.5v
Tabel IV. 4 hasil pengujian siang hari
Percobaan Tegangan Output(V)
1 4.41
Pengujian II Pengujian I diambil pada malam hari pukul 19.00-19.15,pada tanggal 10/06/2014
Tabel IV. 5 hasil pengujian malam hari
Percobaan Tegangan Output(V)
1 0.00
3 0.02
4 0.01
5 0.01
Rata-rata 0.01
Pengujian sensor cahaya dilakukan pada dua kondisi waktu yaitu data diambil pada siang hari dan malam hari,bisa dilihat pada tabel diatas tabel I diambil pada siang hari dan data yang didapat memiliki rata-rata tegangan keluaran 4.401 mikroprosesor akan menghitung data ,dan jika data rata-rata diatas dari 60% maka sensor cahaya bernilai 1(high). Dan pada percobaan tabel ke II diambil pada malam hari .dari hasil percobaan diambil rata-rata tegangan yang keluar berkisar 0.1v dan persentase cahaya 0.9%, yang menunjukan sensor bernilai 0(low) karena berada dibawah batas cahaya.
Perhitungan manual pada pengujian ini menggunakan rumus yang sama yaitu dengan
Sebagai contoh diambil salah satu data hasil uji dari pengujian siang hari
1. 100%
Dengan pembandingkan hasil perhitungan manual dengan hasil pengukuran menggunakan alat dapat diketahui bahwa nilai persentase yang diperoleh dapat dikatakan sama atau mendekati sama.
4.1.1.4 Pengujian sensor suhu
Pengujian pencocokan temperatur udara pada sensor suhu digunakan sebuah termometer digital dan volmeter digital,dimana sensor suhu diberi tegangan ±5V dan keluaranya terhubung pada mikrokontroler dan dilakukan pengukuran dengan program debug arduino.
Pengujian II
Tabel IV. 7 hasil pengujian sensor suhu LM35 pada pukul 19.00-19.10 Percobaan Tegangan output(V) Suhu (°C)
Pada tabel IV.7 dan IV.8 data diambil secara real pada siang hari dan diperoleh rata-rata dari sensor suhu yaitu berkisar 31.693°C dengan tegangan keluaran 0.299 V. Data hasil pengujian alat dibandingkan dengan sensor digital yang terletak pada jembatan penyebrangan di jalan Ir H. Juanda. Dari hasil perbandingan kedua tabel pengujian diketahui bahwa terdapat perbedaan perolehan data antara perolehan data alat dan data sensor digital, hal ini mungkin dikarenakan oleh perbedaan sensitivitas alat terhadap lingkungan sekitar dan panas dari sinar matahari. Namun perbedaan rata-rata hasil pengujian data antara kedua sensor tidak terlalu jauh hanya selisih 1%. Karena data yang diperoleh masih diatas 27,5°C (batas minimal logika high) maka sensor masih berlogika high.sedangkan pada tabel IV.9 adalah data yang diambil pada malam hari memiliki rata-rata suhu 25.44°C dan tegangan keluaran 0.238V karena berada di bawah batas minimal logika high maka sensor suhu bernilai 0 (low).
mendeteksi suhu objek lain yang berada di dekatnya.dari hasi percobaan pengujian diatas dapat disimpulkan bahwa sensor bekerja dengan baik dengan sensitivitas yg baik.
4.1.1.5 Pengujian limit switch
Pengujian limit switch dilakukan dengan cara di tekan pada tombol yang terdapat pada sensor guna mengetahui sensitivitas alat terhadap sebuah tekanan. Dari hasil uji diketaui push button berjalan dengan baik ketika Normally open / Normally close berikut merupakan data hasil uji limit switch.
Tabel IV. 8Tegangan output limit switch
Status Tegangan output(volt)
Normally close 4.33
Normally open 0.02
Open berarti terbuka, sehingga arus tidak mengalir karena tidak terhubung. Close berarti tertutup, sehingga arus mengalir karena terhubung.
4.1.2 Pengujian dan analisa program Arduino
Gambar 4. 2. Compiling program arduino
Berdasarkan pengujian diatas disimpulkan program dapat berjalan dengan baik tidak ada pesan error saat di compile, dan muncul pesan Done compiling.
4.2 Pengujian dan Analisa Mekanik Alat
Gambar 4. 3 mekanika alat pada bak mobil truk.
Seperti terlihat pada gambar mekanika menggunakan rantai untuk menarik tirai untuk menutup seluruh bak truk, atau menarik untuk membuka tirai.Pengujian dilakukan untuk mengetahui rantai dan motor menyatu dengan baik dan tidak lepas pada saat motor bergerak menarik atau menggulung tirai.
4.2.1 Pengujian driver motor
Pengukuran tegangan pada masukan dan keluaran yang dihasilkan driver motor untuk mengatur laju motor .
Tabel IV. 9.pengukuran tegangan driver motor
Arah putaran Tegangan output(V) Motor1 Motor 2 Diam 0.15 0.15
Kiri 10.69 1.33 Kanan 1.30 10.57
Diam 12.11 12.11
Keterangan ; Tegangan input = 12.12 V
4.2.2 Pengujian motor 1 dan 2
Pengujian motor dilakukan untuk mengetahui motor berputar dengan arah yang sesuai, seperti tidak berlawanan arah. Dapat dilihat pada tabel IV.10tegangan yang masuk pada masing-masing motor untuk bergerak sesuai dengan arah yang di inginkan.
Tabel IV. 10 tabel tegangan motor
motor Tegangan diam(v) Tegangan bergerak(v)
1 0.02 11,12
2 0.04 11,4
Setelah melakukan pengujian pada motor 1 dan 2, bekerja dengan baik dan berputar sesuai dengan arah yang ditentukan yaitu berputar menggulung dan membuka.
4.3 Pengujian dan Analisa Algoritma
Pada bagian ini akan diperlihatkan hasil dari pengujian dari program keseluruhan alat. Aturan dalam hal pembuatan program yang berbasis arduino dimaksudkan untuk memberi kemudahan dan ketepatan dalam pembuatan alat.
Tabel IV. 11 data kerja alat
Tabel IV.11 diatas merupakan hasil uji keseluruhan pada alat, kondisi dari tiap-tiap sensor menentukan kerja gerak motor untuk membuka atau menutup tirai. Dari tabel dapat dilihat dibutuhkan dua kondisi atau lebih untuk diproses oleh mikrokontroler yang nantinya akan memberi perintah pada motor untuk menggerakan tirai sesuai data kondisi yang di peroleh. Waktu yang dibutuhkan motor untuk membuka dan menutup bak mobil secara keseluruhan adalah sebagai berikut,
Tabel IV. 12 Tabel waktu Buka-Tutup
Kondisi gerak motor Waktu yang dibutuhkan
Menutup 5,8 detik Membuka 5,5 detik
Dan Berikut merupakan gambar debug program arduino yang telah dijalankan
Gambar 4. 4 debug program arduino
Data waktu yang diperoleh dari tabel diatas diambil dengan menggunakan
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Berdasarkan hasil perancangan dan penelitian yang dilakukan, maka dapat disimpulkan sebagai berikut :
1. Sistem alat(embedded system) telah berhasil diaplikasikan pada bak mobil (model simulasi),dan berhasil bekerja secara otomatis,
2. Sistem pendeteksian telah bekerja cepat dalam pendeteksian keadaan suhu, cahaya dan air.
3. Penggunaan bahasa tingkat tinggi arduino dapat memudahkan pemrograman pada alat.
4. Sensor – sensor yang digunakan (LM35, LDR, sensor kelembapan dan limit switch) telah bekerja dengan baik sesuai fungsinya masing- masing .
5. Mekanik bekerja dengan baik ,ketika motor bergerak menutup dan membuka. 6. Gangguan yang terjadi adalah ketika terjadi hujan panas (hujan tetapi ada sinar
matahari),hal ini karena sensor hanya mendeteksi 1 kondisi,dimana untuk mengoperasikan alat di butuhkan 2 kondisi sensor yang di pakai.
5.2 Saran
Terdapat beberapa saran untuk research lebih lanjut sebagai berikut :
1. Pengaturan posisi mekanik yang lebih baik
2. Penambahan LCD guna mengetahui kondisi suhu, cahaya, air pada alat