Padangsidimpuan, 22712
Contact Number (Mobile) : 0857 95 700076 E-mail : [email protected]
INFORMASI PERSONAL
Tempat/Tanggal Lahir : Padangsidimpuan / 14 Juni 1990 Jenis Kelamin : Perempuan
Status : Lajang
Agama : Katolik
RIWAYAT PENDIDIKAN
2008 – 2013 Strata 1 Teknik Elektro
UNIKOM ( Universitas Komputer Indonesia), Bandung 2005 – 2008 Sekolah Menengah Atas
SMA Santo Thomas 1, Medan Jurusan : IPA
2002– 2005 Sekolah Lanjutan Tingkat Pertama SMP Kesuma Indah, Padangsidimpuan 1996 – 2002 Sekolah Dasar
SD Xaverius, Padangsidimpuan
PENGALAMAN BEKERJA
Juli – September Kerja praktek di PT.INTI Bandung 2010
Saya menyatakan bahwa seluruh informasi di atas adalah benar.
Bandung, 02 September 2013
STUDI KOMPARASI PENGONTROL ROBOT MOBIL PADA
SMARTPHONE ANDROID BERBASIS
TEKNOLOGI NIRKABEL
Diajukan sebagai salah satu syarat menempuh ujian Sarjana Strata 1 (S1) pada program studi Teknik Elektro
Disusun Oleh:
SITIURAN SIMANUNGKALIT
1.31.08.022
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
iii
Puji dan syukur saya ucapkan kepada Tuhan Yesus Kristus atas segala kemurahan dan pertolongan-Nya, sehingga saya dapat menyelesaikan laporan tugas akhir ini dengan judul “Studi Komparasi Strategi Pengendalian Nirkabel Robot Mobil Menggunakan Smartphone Android”. Laporan tugas akhir ini diajukan sebagai persyaratan dalam menyelesaikan studi pada Program Studi Teknik Elektro, Fakultas Teknik dan Ilmu Komputer Universitas Komputer Indonesia.
Dalam penulisan Laporan tugas akhir ini, tentunya banyak pihak yang telah memberikan bantuan baik moril maupun materil. Oleh karena itu, dalam kesempatan ini saya ingin menyampaikan ucapan terima kasih saya secara khusus kepada kedua Orangtua terhebat saya, Bapak dan Mama tercinta atas kasih sayang, motivasi dan doa restu yang tiada putusnya dan kepada keempat Saudara tersayang “Bang Sapde, Ka Anna, Bang Adel, dan De Aci” yang banyak
memotivasi saya. Saya juga ingin mengucapkan terimakasih kepada. 1. Bapak Dr. Ir. Eddy Suryanto Soegoto, M.Sc selaku Rektor UNIKOM..
2. Bapak Prof. Dr. H. Denny Kurniadie, Ir., M.Sc selaku Dekan Fakultas Teknik dan Ilmu Komputer UNIKOM
3. Bapak Muhammad Aria, M.T. sebagai Ketua Program Studi Teknik Elektro UNIKOM.
6. Ibu Tri Rahajoeningroem, M.T, sebagai Koordinator Tugas Akhir Program Studi Teknik Elektro UNIKOM.
7. Marchell Imanuel, Kang Ari, Pak Bambang, Eko R., Kriston Y. Situmorang Leonardus Sitohang dan Ivan Melalolin yang telah bersedia meluangkan waktu untuk membimbing saya dalam pengerjaan tugas akhir ini.
8. Keluarga FA saya, terutama Ka Belinda yang selalu mendoakan saya.
9. Keluarga 6C++: Brian Tampubolon, Andrew Sirait, Manimbul J.Silitonga, Rosdiana Tarigan, Grace G.P.Usmany (sahabat seperjuangan), Irfan C. Ginting, Jhan Mayer, Anggi Sanjaya K., Tirza R. Manurung dan Widia Putri Julika, Adik-adikku: Yolanda E. Parede, Ardy Singgalen, Rinaldo Singgalen, Hans Brian Setra, Eva Meilina H., Martha Gloria, Novira R. Lumentut dan Nova Nolita Bago, serta sahabat saya Iin Angreani Sitohang yang banyak memberikan bantuan, motivasi dan dorongan agar saya tidak menyerah sehingga saya dapat menyelesaikan Laporan Tugas Akhir ini.
10. Rekan-rekan seperjuangan mahasiswa Teknik Elektro 2008 UNIKOM atas semangat dan motivasi selama penulisan laporan ini.
Semoga Laporan Tugas Akhir ini dapat memberikan mamfaat yang optimal bagi saya khususnya dan bagi para pembaca pada umumnya. Saya mengharapkan kritik dan saran dari para pembaca demi kesempurnaan dan pengembangan laporan ini ke arah yang lebih baik.
Bandung, Agustus 2013
v
ABSTRAK ...i
ABSTRACT ...ii
KATA PENGANTAR ...iii
DAFTAR ISI ...v
DAFTAR GAMBAR ...ix
DAFTAR TABEL ...xi
DAFTAR SIMBOL ...xiii
BAB I PENDAHULUAN 1.1 Latar Belakang Masalah ... 1
1.2 Identifikasi Masalah ... 2
1.3 Rumusan Masalah ... 3
1.4 Tujuan ... 3
1.5 Batasan Masalah ... 3
1.6 Kegunaan Penelitian ... 4
1.7 Metode Penelitian ... 4
1.8 Sistematika Penulisan Laporan ... 6
BAB II DASAR TEORI 2.1 Komunikasi Data ... 7
2.1.1 Komunikasi Serial ... 7
2.1.2 Proses Komunikasi ... 8
2.1.3 Metode transmisi ... 8
2.2.1 Sejarah Robot ... 9
2.2.2 Karakteristik Robot ... 10
2.2.3 Disain Robot ... 11
2.3 Android ... 11
2.3.1. Versi Android ... 12
2.3.2. Kebutuhan Sistem Software ... 14
2.4 Accelerometer ... 15
2.5 Mikrokontroler ... 16
2.6 Bluetooth ... 18
2.6.1 Jangkauan Operasi Bluetooth ... 19
2.6.2 Kelebihan dan Kekurangan Bluetooth... 19
2.7 WiFi (Wireless Fidelity) ... 21
2.7.1 Prinsip Kerja WiFi ... 22
2.7.2 Kelebihan dan Kekurangan WiFi ... 22
2.8 Aktuator ... 23
2.8.1 Motor DC... 22
2.8.2 IC Driver Motor ... 24
2.8.3 PWM (Pulse Widht Modulation)... 25
2.9 Regulator ... 27
2.10 Bahasa C ... 28
2.11 CodeVision AVR ... 28
2.12 Eagle ... 29
3.2 Baterai ... 31
3.3 Bluetooth ... 33
3.4 WiFi ... 34
BAB IV PERANCANGAN ALAT 4.1 Perancangan Sistem ... 36
4.2 Perancangan Mekanik Robot Mobil ... 37
4.3 Rangkaian Sistem Minimum Mikrokontroler ATMEGA164p ... 38
4.4 Driver Motor L298N ... 39
4.5 Rangkaian Modul Bluetooth HC-06 ... 40
4.6 Rangkaian Modul Tp-Link MR3020 ... 41
4.7 Rangkaian Pengendali Secara Keseluruhan ... 42
4.8 Perancangan Algoritma Accelerometer ... 45
4.9 Perancangan Perangkat Lunak ... 47
BAB V ANALISA DAN PENGUKURAN 5.1 Pengujian Tampilan Aplikasi Android ... 49
5.1.1 Tampilan Awal Aplikasi... 49
5.1.2 Tampilan Pencarian Bluetooth Device ... 50
5.1.3 Tampilan Pemilihan Input Perintah ... 51
5.1.4 Tampilan Pengontrolan Menggunakan Screen Button ... 51
5.1.5 Tampilan Pengontrolan Menggunakan Accelerometer ... 53
5.2 Pengujian Jarak dan Waktu Media Komunikasi ... 53
5.3 Pengujian Inputan Perintah Terhadap Media Komunikasi... 56
5.3.1 Pengujian Screen Button pada Bluetooth dan WiFi ... 56
5.4 Perbandingan Pengunaan Arus pada Bluetooth dan WiFi ... 72 5.5 Perbandingan Media Komunikasi ... 73
BAB VI PENUTUP
6.1 Kesimpulan ... 74 6.2 Saran ... 75
DAFTAR PUSTAKA ... 76
76
DAFTAR PUSTAKA
Budiharto, Widodo. 2010. Robotika Teori + Implementasi. Yogyakarta. Andi. H, Safaat Nazruddin. 2011. Android. Bandung. Informatika.
Zaki, Ali. dkk. 2011. Membuat Sendiri Aplikasi Android untuk Pemula. Jakarta. PT.Gramedia.
Daryanto. 2011. Teknik Mekatronika. Bandung. PT.Sarana Tutorial Nurani Sejahtera.
1
BAB I
PENDAHULUAN
BAB 1
1.1 Latar Belakang Masalah
Salah satu teknologi yang sedang berkembang pesat saat ini adalah Android. Android merupakan salah satu dari berbagai macam sistem operasi pada telepon seluler.
Telepon seluler berbasis Android dijuluki sebagi telepon pintar atau lebih sering disebut sebagai smartphone. Dikatakan sebagai telepon pintar karena kepintaran dan kelengkapan fitur-fitur yang dimilikinya membuat telepon seluler ini memiliki fungsi ganda atau multifungsi. Tidak hanya sekedar berfungsi mengirim pesan menerima telepon, tapi dapat mengambil gambar, merekam, menemukan lokasi, dapat terkoneksi dengan internet 24 jam, bahkan dapat memiliki fungsi sebagai remote control.
Karena kepintaran yang dimilikinya inilah yang membuat smartphone
Android layak untuk dipelajari, diteliti dan dikembangkan. Fungsi yang akan diuji dan dipelajari dalam tugas akhir ini adalah fungsinya sebagai remote control yang dapat mengontrol suatu perangkat atau piranti.
Dalam tugas akhir ini pengujian dan pembelajaran mengenai fungsi
smartphone Android sebagai remote control bukan hanya membuat aplikasi yang dapat mengontrol sebuah robot mobil saja, tapi melakukan studi komparasi atas fitur-fitur yang dimilikinya dalam mengontrol robot mobil, untuk mengatasi kesulitan dalam memilih media komunikasi dan inputan perintah yang paling cocok digunakan dalam mengontrol sebuah robot mobil. Fitur-fitur yang akan dikomparasi yaitu, media komunikasi Bluetooth dan WiFi yang umum ada pada
smartphone. Satu lagi yang akan dikomparasi yaitu inputan perintah dengan menggunakan screen button dan accelerometer. Oleh karena itu, tugas akhir ini diberi judul “Studi Komparasi Pengontrol Robot Mobil Pada Smartphone Android Berbasis Teknologi Nirkabel”.
1.2 Identifikasi Masalah
Berdasarkan latar belakang yang telah diuraikan, maka dapat diidentifikasikan beberapa masalah yaitu sebagai berikut.
1. Perlu diteliti fungsi smartphone Android sebagai remote control karena pada umumnya aplikasi Android digunakan untuk mengontrol perangkat yang ada pada smartphone bukan mengontrol perangkat diluar HP Android seperti mengontrol robot mobil.
1.3 Rumusan Masalah
Agar penelitian ini menjadi terarah, maka perlu dirumuskan masalah yang akan diteliti. Berdasarkan identifikasi masalah diatas, maka rumusan masalah dalam penelitian ini adalah.
1. Bagaimana membuat aplikasi yang dapat mengontrol pergerakan sebuah robot mobil sederhana?
2. Bagaimana menentukan pengendalian mana yang paling cocok digunakan dalam mengontrol robot mobil menggunakan Bluetooth dan WiFi sebagai media komunikasi dan screen button dan accelerometer sebagai inputan perintah?
1.4 Tujuan
Untuk mengetahui apa yang harus dikerjakan dalam penelitian ini, maka harus ditetapkan apa yang menjadi tujuan-tujuan yang ingin dicapai. Tujuan penelitian ini adalah sebagai berikut.
1. Membuat aplikasi yang dapat mengontrol pergerakan sebuah robot mobil sederhana.
2. Menentukan pengendalian mana yang paling cocok digunakan dalam mengontrol robot mobil menggunakan Bluetooth dan WiFi sebagai media komunikasi dan screen button dan accelerometer sebagai inputan perintah.
1.5 Batasan Masalah
penelitian dapat tercapai. Beberapa batasan yang digunakan dalam penelitian adalah sebagai berikut.
1. Platform Android yang digunakan adalah versi 2.3 (Gingerbread). 2. Mikrokontroler menggunakan ATmega164p.
3. Pemilihan WiFi atau Bluetooth pada robot mobil menggunakan switch.
4. Media komunikasi nirkabel yang akan dibandingkan adalah Bluetooth dan WiFi (media komunikasi standar smartphone Android).
5. Jenis inputan perintah yang akan dibandingkan adalah screen button dan accelerometer.
1.6 Kegunaan Penelitian
Sebuah penelitian diharapkan memiliki kegunaan. Tentunya kegunaan tersebut dapat dirasakan oleh peneliti atau pun pihak-pihak lain. Adapun kegunaan penelitian ini adalah sebagai bahan masukan bagi mahasiswa/i yang ingin bermaksud mengadakan penelitian menyangkut “Pengontrolan menggunakan
smartphone Android”.
1.7 Metode Penelitian
Metode penelitian yang dilakukan penulis adalah eksperimental dengan tahapan sebagai berikut.
1. Tinjauan pustaka
Suatu metode pengumpulan data dengan membaca atau mempelajari buku-buku yang berhubungan dengan masalah yang menjadi topik dalam skripsi. 2. Survey
3. Pengumpulan data
Metode untuk mendapatkan data dari topik yang diambil dengan cara mengajukan pertanyaan secara langsung kepada pihak-pihak yang berkompeten mengenai hal-hal yang dipelajari selama pengerjaan tugas akhir. 4. Pengolahan data
Proses untuk mengolah data-data yang didapat dari hasil pengumpulan data, untuk dijadikan referensi dalam pengerjaan tugas akhir.
5. Perancangan
Mengaplikasikan teori yang didapat dari studi pustaka dan dari hasil bimbingan, sehingga tersusun suatu perancangan sistem untuk bagian perangkat keras juga untuk perangkat lunak.
6. Pembuatan
Merupakan tahap pengerjaan alat yang sebelumnya telah dirancang. 7. Pengujian
Merupakan metode untuk mengetahui hasil dari perancangan sistem yang dibuat, ujicoba dilakukan berkali-kali sehingga di dapatkan data yang akurat, dilakukan pada bagian perangkat keras juga pada perangkat lunak.
8. Analisa
1.8 Sistematika Penulisan Laporan
Sistematika penulisan skripsi ini disusun untuk memberikan gambaran umum tentang penelitian yang dijalankan. Sistematika penulisan skripsi ini adalah sebagai berikut.
BAB I PENDAHULUAN
Menguraikan latar belakang, identifikasi masalah, rumusan masalah, tujuan, batasan masalah, kegunaan penelitian, metoda penelitian, dan sistematika penulisan laporan yang digunakan dalam pembuatan laporan ini.
BAB II DASAR TEORI
Bab ini berisi tentang teori-teori penunjang yang berkaitan dengan masalah yang dibahas.
BAB III LATAR BELAKANG PEMILIHAN KOMPONEN
Bab ini berisi tentang alasan atau latar belakang dalam pemilihan komponen yang digunakan.
BAB IV PERANCANGAN ALAT
Bab ini berisi tentang perancangan hardware maupun software dari sistem yang akan dibuat.
BAB V PENGUJIAN DAN ANALISIS
Bab ini berisi tentang hasil uji coba sistem, baik hardware maupun
software secara keseluruhan serta hasil analisanya. BAB VI PENUTUP
7
DASAR TEORI
BAB 2
Pada bab ini akan dijelaskan mengenai studi pustaka aplikasi pengendalian nirkabel robot mobil pada smartphone Android, teori-teori penunjang sistem baik perangkat keras (hardware), maupun perangkat lunak (software), serta beberapa teori penunjang lainnya.
2.1 Komunikasi Data
Komunikasi data adalah bagian dari telekomunikasi yang secara khusus berkenaan dengan transmisi atau pemindahan data dan informasi dari suatu piranti kepada piranti lain dalam bentuk digital yang dikirimkan melalui media komunikasi data. Transmisi data adalah proses yang terjadi antara transmitter dan
receiver melalui suatu media transmisi yang diklasifikasikan sebagai guided
media, mengacu pada media transmisi fisik berupa kabel, dan unguided media, mengacu pada media transmisi nirkabel. Sedangkan data berarti informasi yang disajikan oleh isyarat digital.
2.1.1 Komunikasi Serial
Komunikasi serial adalah komunikasi yang mengantarkan data digital secara bit per bit secara bergantian melalui media interface serial, contoh: modem,
tidak mesti senilai dengan 1 bit per second, tergantung besaran data untuk setiap kali clock transfer.
2.1.2 Proses Komunikasi
Dalam proses komunikasi dibutuhkan beberapa komponen. Kompenen-komponen tersebut antara lain.
1. Sumber informasi, merupakan suatu perangkat yang membangkitkan data. 2. Transmitter untuk mengubah informasi kedalam sinyal data yang sesuai
dengan media transmisi.
3. Media transmisi, dapat berupa jalur-jalur kabel (wireline) atau nirkabel (wireless) sebagai penghubung antara sumber dan tujuan.
4. Receiver, mengubah sinyal data ke bentuk yang dimengerti penerima. 5. Tujuan, merupakan tujuan akhir dari pengiriman data.
Gambar 2.1 Proses Komunikasi
2.1.3 Metode Transmisi
Metode transmisi data terbagi menjadi dua. Berikut ini dua metode dalam transmisi data, yakni.
2. Asynchronous, pada metode ini proses sinkronisasi dilakukan dengan menyisipkan penanda sinkronisasi pada data, yang paling umum adalah penanda awal data dan akhir data.
2.2 Robot
Robot adalah sebuah alat mekanik yang dapat melakukan tugas fisik. Ada yang menggunakan pengawasan dan kontrol manusia, ataupun menggunakan program yang telah didefinisikan terlebih dulu (kecerdasan buatan).
2.2.1 Sejarah Robot
Istilah robot berasal dari Czech, robota, yang berarti bekerja. Istilah itu diperkenalkan ke publik oleh Karel Capek saat mementaskan RUR (Rossum’s
Universal Robots) pada tahun 1921.
Gambar 2.2 Pementasan RUR
Al-Jajari (1136-1206), seorang ilmuwan pada dinasti Artuqid, dianggap sebagai tokoh yang pertama kali menciptakan robot humanoid yang berfungsi sebagai 4 musisi. Pada Tahun 1770, Pierre Jacquet Droz, seorang pembuat jam berkebangsaan Swiss, membuat 3 boneka mekanis. Boneka-boneka itu dapat melakukan fungsi spesifik seperti menulis, menggambar, memainkan musik dan organ. Pada tahun 1898 Nikola Tesla membuat sebuah boat yang dikontrol melalui radio remote control, dan didemokan di Madison Square Garden. Namun usaha untuk membuat autonomous boat tersebut gagal karena masalah dana. Jepang, pada tahun 1967, yang pada saat itu merupakan Negara yang baru bangkit, mengimpor robot Versatran dari AMF. Kejayaan robot dimulai pada tahun 1970 ketika Profesor Victor Scheinman dari Universitas Stanford mendesain lengan standar. Terakhir, pada tahun 2000, Honda memamerkan robot yang dibangun bertahun-tahun lamanya, yang diberi nama ASIMO, yang kemudian disusul oleh Sony dengan robot anjing AIBO-nya.
2.2.2 Karakteristik Robot
Umumnya sebuah robot minimal memiliki salah satu dari beberapa karakteristik dibawah ini. Karakteristik yang dimaksudkan antara lain.
1. Sensing: Robot harus dapat mendeteksi lingkungan sekitarnya (halangan, panas, suara, image).
2. Cerdas: Robot memiliki kecerdasan buatan agar dapat memutuskan aksi yang tepat dan akurat.
4. Membutuhkan energi yang memadai: Robot membutuhkan catu daya yang memadai agar unit pengontrol dan aktuator dapat menjalankan fungsinya dengan baik.
2.2.3 Disain Robot
Robot didisaindan dibuat sesuai kebutuhan pengguna. Robot, hingga saat ini, secara umum dibagi menjadi beberapa kategori, yaitu.
1. Robot manipulator (arm robot) 2. Robot mobil (mobile robot)
a. Robot daratan (ground robot) 1) Robot beroda
2) Robot berkaki
b. Robot air (submarine robot) c. Robot terbang (aerial robot)
2.3 Android
Android adalah sebuah sistem operasi berbasis Linux yang dirancang untuk mobile device seperti smartphone dan komputer tablet. Sistem operasi
Android dipuji sebagai platform mobile pertama yang lengkap, terbuka, dan bebas.
1. Lengkap (complete platform): para disainer dapat melakukan pendekatan yang komprehensif ketika mengembangkan platform Android. Android merupakan sistem operasi yang aman dan banyak menyediakan tools dalam membangun software dan memungkinkan untuk peluang pengembangan aplikasi.
2. Terbuka (open source platform): platform Android disediakan melalui lisensi
open source. Pengembang dapat dengan bebas mengembangkan aplikasi. Android menggunakan Linux Kernel 2.6.
3. Free (free platform): Android adalah platform yang bebas untuk develop. Tidak ada lisensi atau biaya royalti untuk dikembangkan pada platform
Android. Tidak ada biaya keanggotaan. Tidak diperlukan biaya pengujian. Tidak ada kontrak yang diperlukan. Android dapat didistribusikan dan diperdagangkan dalam bentuk apapun. Android merupakan generasi baru
platform mobile, platform yang memberikan pengembang untuk melakukan pengembangan sesuai dengan yang diharapkannya.
2.3.1. Versi Android
Telepon pertama yang menggunakan sistem operasi Android adalah HTC Dream, yang dirilis pada 22 Oktober 2008. Pada penghujung tahun 2010 diperkirakan hampir semua vendor seluler di dunia menggunakan Android sebagai
Adapun versi-versi Android yang pernah dirilis dari awal hingga saat ini adalah sebagai berikut.
1. Android versi 1.0 2. Android versi 1.1
3. Android versi 1.5 (Android Cupcake) 4. Android versi 1.6 (Android Donut) 5. Android versi 2.0/2.1 (Android Eclair)
6. Android versi 2.2 (Android Froyo: Frozen Yoghurt) 7. Android versi 2.3 (Android Gingerbread)
8. Android versi 3.0 (Android Honeyc0mb)
9. Android versi 4.0 (Android Ice Cream Sandwich) 10. Android versi 4.1 (Android Jelly Bean)
2.3.2. Kebutuhan Sistem Software
Untuk membuat aplikasi Android, yang dipersiapkan terlebih dahulu adalah sebagai berikut.
1. Java JDK (Java Development Kit) & JRE (Java Runtime Environment)
Sesuai yang disyaratkan pada System Requirements Android, diharuskan menginstal JDK terlebih dahulu. Karena apabila hanya menginstal JRE, maka tidak cukup (JRE alone is not sufficient).
2. Android SDK
Adalah tools API (Application Programming Interface) yang diperlukan untuk mulai mengembangkan aplikasi pada platform Android menggunakan bahasa pemrograman Java.
3. EclipseGalileo (versi 3.5)
Adalah IDE (Integrated Development Environment) Java untuk membangun aplikasi Android.Dimana juga berfungsi sebagai database.
4. ADT (Android Development Tools)/Plugins Eclipse
Plugins ini yang membuat eclipse dapat membuat project yang berbasis Android. ADT digunakan sebagai penghubung antara IDE Eclipse dengan AndroidSDK.
5. DroidDraw
Adalah sebuah tool tambahan untuk membuat UI aplikasi Android, yang terdiri dari 3 jendela utama yang sering dipakai, yaitu : Screen Canvas,
Jendela Komponen (Widgets) dan propertynya, serta Output Screen.
2.4 Accelerometer
Accelerometer adalah sebuah tranduser yang berfungsi untuk mengukur percepatan, mendeteksi dan mengukur getaran, ataupun untuk mengukur percepatan akibat gravitasi bumi. Accelerometer juga dapat digunakan untuk mengukur getaran yang terjadi pada kendaraan, bangunan, mesin, dan juga bisa digunakan untuk mengukur getaran yang terjadi di dalam bumi, getaran mesin, jarak yang dinamis, dan kecepatan dengan ataupun tanpa pengaruh gravitasi bumi. Percepatan merupakan suatu keadaan berubahnya kecepatan terhadap waktu. Bertambahnya suatu kecepatan dalam suatu rentang waktu disebut juga percepatan (acceleration). Jika kecepatan semakin berkurang daripada kecepatan sebelumnya, disebut deceleration. Percepatan juga bergantung pada arah/orientasi karena merupakan penurunan kecepatan yang merupakan beesaran vector. Berubahnya arah pergerakan suatu benda akan menimbulkan percepatan pula.
Gambar 2.4 Sumbu pada Accelerometer
dalam mode landscape atau portrait, mendeteksi suatu getaran suatu pengambilan foto, dan lain-lain. Fungsi yang lain juga digunakan sebagai sensor untuk bermain
game. Sensor accelerometer sudah diterapkan terlebih dahulu oleh konsol Nintendo Wii, bahkan di beberapa ponsel juga diterapkan sensor tersebut untuk mendeteksi kekuatan G-Forces akibat kecelakaan mobil sehingga otomatis melakukan panggilan darurat ke nomor tertentu. Accelerometer juga bisa diterapkan sebagai aplikasi sport untuk mendeteksi jumlah langkah kita berjalan atau berlari berdasarkan gerakan pinggul. Beberapa ponsel memang dilengkapi dengan accelerometer, tetapi banyak pula menggunakan tilt sensor sebagai pengganti accelerometer, hanya saja kemampuan tilt sensor tidak selengkap
accelerometer.
2.5 Mikrokontroler
Mikrokontroler adalah sebuah sistem microprocessor dimana di dalamnya sudah terdapat CPU, ROM, RAM dan I/O, clock dan peralataninternal lainnya yang sudah saling terhubung dan terorganisasi dengan baik oleh pabrik pembuatnya dan dikemas dalam satu chip yang siap pakai. Sehingga kita tinggal memprogram isi ROM sesuai aturan penggunaan oleh pabrik yang membuatnya. Terdapat dua jenis mikrokontroler yang berkembang saat ini dan masing-masing mempunyai keturunan/keluarga sendiri.
1. RISC (Reduced Instruction Set Computer) : instruksi terbatas tapi memiliki fasilitas yang lebih banyak.
Hal ini didasarkan pada arsitektur prosesor dan set intruksinya. Sebagai contoh MC51 (AT89S51/52) merupakan tipe CISC yang memerlukan 12 siklus clock untuk melaksanakan satu siklus instruksi. Tipe AVR (Alf and Vegard’s Risc Processor) yang merupakan jenis RISC, hanya perlu satu siklus saja, sehingga jelas lebih cepat waktu eksekusinya.
ATMEL (perusahaan pembuat mikrokontroler) membuat 4 jenis/varian untuk tipe AVR. Tipe-tipe AVR tersebut adalah.
1. Tiny AVR
Mikrokontroler yang memiliki ukuran mungil dan ukuran flash memori yang kecil pula. Parameternya: 0.5–16 kB Flash, 6–32 pins,dll.
Contoh: ATTINY 2313, ATTINY10, ATTINY 15, ATTINY 24. 2. Mega AVR
Merupakan jenis yang memiliki kemampuan dan ukuran flash memori yang lebih dibandingkan dengan jenis ATTINY. Selain itu, jenis ini memiliki jumlah port I/O yang lebih banyak. Parameter: 4–512 kB Flash, 28–100 pins, dll.
Contoh: ATMEGA 8, ATMEGA 48, ATMEGA 16, ATMEGA 128
3. XMEGA AVR
Mikrokontoler jenis ini memiliki keunggulan pada kinerja dan konsumsi dayanya, membutuhkan daya rendah dengan kinerja tinggi. Parameter: 16–384 kB Flash, 44–64–100 pin package (A4, A3, A1), dll.
Contoh: ATXMEGA 64, ATXMEGA 128, ATXMEGA 256
4. AVR32-bit UC3
Flash, 48-144 pins, mikrokontroller 32-bit yang paling efisien. Contoh:
AT32UC3L016, AT32UC3L032, AT32UC3L0128
2.6 Bluetooth
Bluetooth adalah sebuah teknologi nirkabel dengan menggunakan media gelombang radio yang bekerja pada frekuensi 2.4 GHz. Teknologi Bluetooth mempunyai kecepatan maksimum 1 Mbps. Bluetooth tidak mahal, tidak memerlukan daya yang besar untuk menghidupkannya atau memakainya.
Gambar 2.5 Logo Bluetooth
Teknologi Bluetooth dirancang dan dioptimalkan untuk perangkat yang bersifat mobile. Komputer yang bersifat mobile (seperti laptop, tablet PC atau
notebook, cellular, network access point, printer, PDA, desktop, keyboard,
joystick dan perangkat yang jangkauannya seperti Bluetooth). Bluetooth juga didesain untuk mendukung komunikasi bersama suara dan data dengan kemamouan transfer data sampai 721Kbps. Bluetooth memerlukan daya yang rendah yaiitu kurang dari 0.1W dan mendukung layanan synchronous dan
Gambar 2.6 Alokasi Frekuensi Radio
2.6.1 Jangkauan Operasi Bluetooth
Jarak jangkau dari perangkat Bluetooth berbeda-beda. Tergantung pada daya listrik dari masing-masing Bluetooth itu sendiri yang terbagi dari tiga kelas, yaitu.
1. Kelas 1, menggunakan daya listrik sebesar 100mW, dengan jangkauan ±100 meter.
2. Kelas 2, menggunakan daya listrik sebesar 2,5mW, dengan jangkuan ±10 meter.
3. Kelas 3, menggunakan daya listrik sebesar 1 mW, dengan jangkauan ±10 centimeter (maksimal 1 meter).
2.6.2 Kelebihan dan Kekurangan Bluetooth
Ada beberapa kelebihan teknologi Bluetooth sehingga menyebabkan teknologi ini banyak dipergunakan antara lain.
1. Sinyal Bluetooth dapat menembus dinding, kotak, dan berbagai rintangan-rintangan lainnya.
2. Bluetooth tidak memerlukan kabel ataupun kawat, sehingga dapat menggantikan penggunaan komunikasi kabel seperti mouse, keyboard, dll. 3. Jangkauan lumayan luas yaitu sampai radius 10 meter selama tidak ada
4. Dapat digunakan untuk transfer data antar perangkat yang memiliki Bluetooth.
Tetapi walaupun demikian Bluetooth juga masih mempunyai beberapa kekurangan, antara lain.
1. Kecepatan transfer Bluetooth tidak tetap dan tergantung dari perangkat yang digunakan untuk mengirim dan menerima data. Terkadang, transfer file dari handphone merk A ke handphone merk B berjalan lambat. Pada kesempatan lain, transfer file dari handphone merk B ke merk A bisa berjalan dengan kecepatan transfer hingga dua kali lipat kecepatan transfer A ke B. Contoh : Transfer file dari HP Nokia ke HP Sony Ericsson misalnya 676kb/menit, tapi transfer file Nokia ke Sony ericsson bisa sampai 1 MB/menit.
2. Keamanan perlu diperhatikan, pada transfer file terkadang terdapat virus yang menyusup ke dalam file yang hendak dikirim. Untuk meminimalkan kemungkinan mendapat virus, lebih baik tidak usah menerima pesan dari perangkat yang dikenal.
3. Walaupun secara teori, sinyal Bluetooth dapat menembus tembok, kualitas transfernya tetap tidak dapat ditentukan.
4. Sulit menentukan jarak maksimal yang dapat ditempuh agar kualitas tidak
drop.
2.7 WiFi (Wireless Fidelity)
Istilah “WiFi” dipakai dalam bahasa Inggris umum sebagai sinonim
WLAN (Wireless Local Area Network). WiFi adalah sebuah teknologi terkenal yang memanfaatkan peralatan elektronik untuk bertukar data secara nirkabel (menggunakan gelombang radio).
Gambar 2.7 Arsitektur WLAN
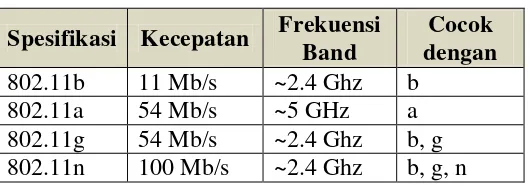
WiFi dirancang berdasarkan spesifikasi IEEE 802.11. Sekarang ini ada empat variasi dari 802.11, yaitu: 802.11a, 802.11b, 802.11g dan 802.11n. Spesifikasi b merupakan produk pertama WiFi. Variasi g dan n merupakan salah satu produk yang memiliki penjualan terbanyak pada 2005.
Tabel 2.1 Spesifikasi WiFi
Spesifikasi Kecepatan Frekuensi
Band
Cocok dengan
2.7.1 Prinsip Kerja WiFi
a. Mode Managed
Menggunakan Access Point yang berfungsi mengatur lalu lintas data,access point ini berfungsi seperti pusat transfer data. Kelebihan mode ini adalah transfer data lebih cepat, area coverage yang lebih luas, pengaturan dan keamanan data lebih terjamin. Mode ini biasa digunakan untuk hotspot wifi dan perkantoran yang memerlukan stabilitas dan keamanan data.
b. Ad-Hoc
Koneksi antar device Wi-fi peer to peer, kelemahan mode ini adalah bila
device WiFi yang terhubung terlalu banyak, transfer data jadi lambat. Keuntungannya, lebih murah dan praktis bila yang terkoneksi cuma 2 atau 3, tanpa beli access point
2.7.2 Kelebihan dan Kekurangan WiFi
a. Kelebihan WiFi
1. Wilayah cakupan amat luas, kecuali di daerah tertentu yang tidak dapat dijangkau (amat terhalang bangunan tinggi).
2. Lebih reliable dalam arti lebih sedikit point of failurenya dibandingkan metode akses darat.
3. Jaringan Wi-Fi mendukung roaming, dimana sebuah mobile client station seperti sebuah laptop komputer dapat pindah dari satu akses point ke lainnya seperti pengguna pindah disekeliling sebuah gedung atau area.
b. Kekurangan WiFi
1. Point-to-pointwireless LAN harus dalam keadaan tidak terhalang apa pun, baik itu pepohonan maupun gedung agar dapat digunakan.
2. Tingkat sekuritas lemah, mudah di hack (penyadapan, injection, jamming, hijacking, access control,dsb)
3. Bila ada medan elektromagnetik dalam frekuensi yang sama saling berdekatan akan terjadi interferensi.
2.8 Aktuator
Aktuator adalah elemen yang berfungsi mengkonversi energi, dari energi listrik ke energi mekanik atau energi yang terlihat. Bentuk konkrit aktuator ini misalnya: motor listrik, solenoid, relay, display, dll.
2.8.1 Motor DC
Motor DC merupakan peralatan elektromekanik dasar yang berfungsi untuk mengubah tenaga listrik menjadi tenaga mekanik. Secara umum, kecepatan putaran poros motor DC akan meningkat seiring dengan meningkatnya tegangan yang diberikan. Dengan demikian, putaran motor DC akan berbalik arah jika polaritas tegangan yang diberikan juga dirubah.
Motor gear DC tidak dapat dikendalikan langsung oleh mikrokontroler, karena kebutuhan arus yang besar sedangkan keluaran arus dari mikrokontroler sangat kecil. Motor driver merupakan alternatif yang dapat digunakan untuk menggerakkan motor DC.
2.8.2 IC Driver Motor
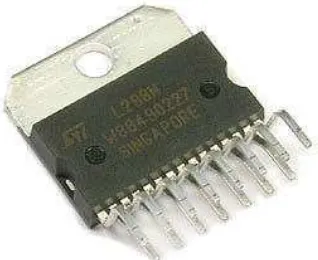
L298N adalah IC yang digunakan sebagai driver motor DC pada penelitian ini. IC ini menggunakan prinsip kerja H-Bridge. Tiap H-Bridge
dikontrol menggunakan level tegangan TTL yang berasal dari output
mikrokontroler. Tegangan yang dapat digunakan untuk mengendalikan robot bisa mencapai tegangan 46 VDC dan arus 2A untuk setiap kanalnya. L298 dapat mengontrol 2 buah motor DC, karena di dalam satu komponen L 298 N terdapat dua rangkaian H-Bridge. Berikut ini bentuk IC L298 yang digunakan sebagai motor driver.
Gambar 2.9 Konfigurasi Pin IC L298N
rangkaian driver motor oleh pengendali (mikrokontroler). Duty cycle PWM yang dikirimkan menentukan kecepatan putar motor DC.
Driver motor L298N mempunyai karakteristik sebagai berikut.
1. Tegangan operasional sampai 46 Volt, 2. Total arus dc sampai 4 Ampere,
3. Tegangan saturasinya rendah,
4. Pengamanan terhadap suhu yang tinggi, 5. Tegangan logic low (0) sampai 1.5 volt.
Gambar 2.10 Bentuk Fisik IC Driver Motor L298N
2.8.3 PWM (Pulse Widht Modulation)
PWM (Pulse width Modulation), adalah sebuah metode untuk pengaturan
kecepatan perputaran, dalam hal ini adalah motor DC untuk gerak robot. PWM dapat
dihasilkan oleh empat metode, sebagai berikut.
1. Metode analog
2. Metode digital
3. IC diskrit
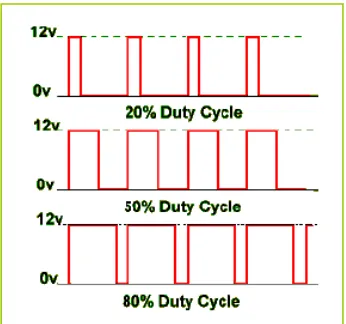
Pada robot ini, metode PWM dikerjakan oleh mikrokontroler. Metode PWM ini akan mengatur lebar atau sempitnya periode pulsa aktif yang dikirimkan oleh mikrokontroler ke driver motor. Pada pengaturan kecepatan robot, nilai PWM mulai dari 0-255. Secara analog besaran PWM dihitung dalam prosentase, nilai ini didapat dari perbandingan: T high / (T high + T low ) * 100%. Dimana T adalah periode atau waktu tempuh untuk sebuah pulsa, yang terbagi menjadi bagian puncak positif (T high) dan puncak negatif (T low).
Gambar 2.11 Ilustrasi persentasi PWM
Semakin rapat periode antar pulsa, maka frekuensi yang dihasilkan akan semakin tinggi, ini berarti kecepatan akan bertambah. Semakin lebar jarak antar pulsa, maka frekuensi semakin rendah ini berarti kecepatan berkurang atau menurun. Kondisi pemberian kecepatan harus disesuaikan dengan kondisi track
2.9 Regulator
Catu daya adalah faktor pendukung yang sangat penting, karena mikrokontroler, modul-modul dan aktuator dapat bekerja karena adanya tegangan.
Power supply yang dibutuhkan untuk mencatu mikrokontroler, modul Bluetooth, modul WiFi dan driver motor L298N yang membutuhkan level tegangan 5V. Tegangan yang digunakan berasal dari baterai rechargeable Li-Po 7,4V 1000mAH, karena mikrokontroler dan modul Bluetooth JY-MCU BT board v1.3 slave hanya mampu bekerja pada level tegangan 5V, maka diperlukan regulator tegangan untuk mendapatkan tegangan 5V, dengan demikian digunakan LM 2596 DC-DC untuk output 5V.
Karakteristik IC regulator :
1. Ada tipe positif untuk meregulasi tegangan positif. 2. Ada tipe negatif untuk meregulasi tegangan negatif.
3. Penerapan IC mengharuskan tegangan input lebih besar dari tegangan output
(Vin > Vout).
4. Transistor dalam konfigurasi tunggal-emiter, dimana tegangan input Vin > tegangan output Vout hanya kalau transistornya jenuh.
2.10 Bahasa C
Beberapa alasan mengapa Bahasa C banyak digunakan. Alasan-alasan tersebut antara lain:
1. bahasa C hampir tersedia di semua jenis komputer, 2. bahasa C adalah bahasa yang terstruktur,
3. memiliki dukungan pustaka yang banyak, 4. proses eksekusi program lebih cepat,
5. kode bahasa C sifatnya adalah portable dan fleksibel untuk semua jenis komputer,
6. bahasa C hanya hanya menyediakan 32 kata kunci.
Dibandingkan dengan bahasa assembler, penggunaan bahasa C dalam pemrograman memiliki beberapa kelebihan dan kekurangan. Kelebihan tersebut adalah mempercepat waktu pengembangan, bersifat modular dan terstruktur. Sedangkan kelemahannya adalah kode program hasil kompilasi akan relatif lebih besar (dan sebagai konsekuensinya hal ini terkadang akan mengurangi kecepatan eksekusi).
2.11 CodeVision AVR
Setelah selesai dengan CodeWizard AVR, selanjutnya pada menu File, pilih
Generate, Saveand Exit dan simpan pada direktori yang diinginkan.
Gambar 2.13 Tampilan Jendela Program CodeWizard AVR
2.12 Eagle
Software eagle merupakan software yang dapat membantu untuk mendisain suatu printed circuit board (PCB). Selain mudah digunakan, di dalam
software Eagle juga terdapat berbagai macam jenis atau merek komponen elektronika yang mendukung dalam pembuatan PCB. Salah satu fasilitas penting yang dimiliki oleh Eagle adalah “print” yang memungkinkan kita untuk mencetak
49
BAB V
ANALISA DAN PENGUKURAN
BAB 5
Dalam bab ini akan diuraikan tentang proses pengujian sistem yaitu melakukan uji coba terhadap aplikasi dan alat yang diharapkan dapat berjalan sesuai perancangan pada bab sebelumnya, selanjutnya akan dilakukan analisis terhadap aplikasi hasil pengukuran tersebut.
5.1 Pengujian Tampilan Aplikasi Android
Salah satu tujuan penelitian ini adalah membuat aplikasi yang memiliki fungsi sebagai remote control untuk meggerakkan robot mobil. Maka dilakukanlah pengujian aplikasi yang meliputi sistem kerja aplikasi beserta tampilan-tampilannya.
5.1.1 Tampilan Awal Aplikasi
Pengujian pada tampilan awal aplikasi akan terlihat saat pengguna mulai membuka aplikasi. Pada tampilan awal ini terdapat menu untuk pemilihan menggunakan media komunikasi WiFi ataupun Bluetooth. Tapi sebelum memilih media komunikasi, terlebih dahulu pastikan jika WiFi dan Bluetooth yang ada di HP user (pengguna) telah aktif. Apabila memilih WiFi maka akan terbuka tampilan menu untuk memilih inputan perintah. Tapi jika memilih Bluetooth maka akan muncul permintaan izin untuk menghidupkan Bluetooth apabila Bluetooth dalam keadaan off. Adapun hasil yang sudah didapat terlihat pada hasil
Gambar 5.1 Tampilan Awal Aplikasi
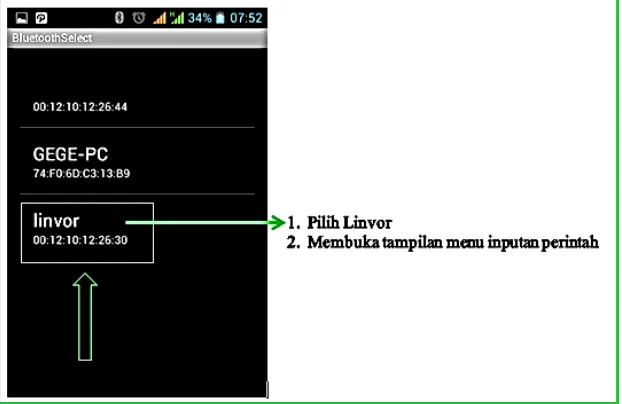
5.1.2 Tampilan Pencarian Bluetooth Device
Pengujian aplikasi pada tampilan pencarian Bluetooth device akan terlihat saat pengguna memilih Bluetooth sebagai media komunikasi. Adapun hasil yang sudah didapat terlihat pada hasil screenshot di bawah ini. Linvor merupakan nama modul Bluetooth serial transceiver (JY-MCU BT board v1.3 slave) yang terdapat pada robot mobil.
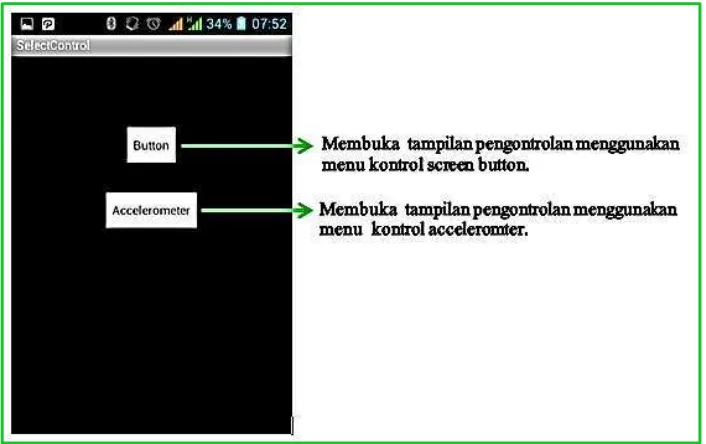
5.1.3 Tampilan Pemilihan Input Perintah
Pengujian aplikasi pada tampilan pemilihan input perintah terlihat saat setelah pengguna memilih Bluetooth atau WiFi pada menu sebelumnya sebagai media komunikasi. Tampilan ini merupakan menu untuk memilih inputan perintah yang akan digunakan untuk menggerakkan robot mobil. Adapun hasil yang sudah didapat terlihat pada hasil screenshot di bawah ini.
Gambar 5.3 Tampilan Pemilihan Input Perintah
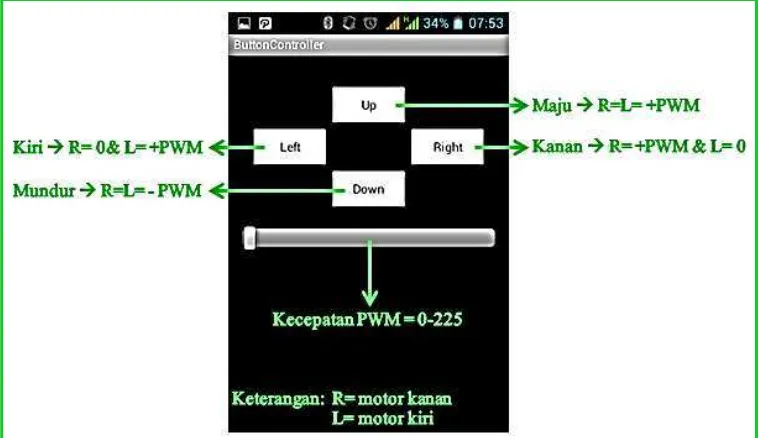
5.1.4 Tampilan Pengontrolan Menggunakan ScreenButton
Gambar 5.4 Tampilan Pengontrolan Menggunakan Button
Ada empat jenis inputan pergerakan disini, yaitu: 1. Up (maju)
Rumus: R=L= +PWM artinya kecepatan motor kanan dan kiri sama dan bernilai positif.
2. Down (mundur)
Rumus: R=L= -PWM artinya kecepatan motor kanan dan kiri sama dan bernilai negatif
3. Left (kiri)
Rumus: R=0 & L= +PWM artinya kecepatan motor kanan = 0 dan kecepataan motor kiri bernilai positif.
4. Right ( kanan)
5.1.5 Pengontrolan Menggunakan Accelerometer
Pengujian aplikasi pada tampilan pengontrolan menggunakan accelerometer terlihat saat pengguna memilih menu accelerometer sebagai pengontrol robot mobil. Adapun hasil yang sudah didapat terlihat pada hasil
screenshot di bawah ini.
Gambar 5.5 Tampilan Pengontrolan Accelerometer ketika Tidak Aktif
Gambar 5.6 Tampilan Pengontrolan Menggunakan Accelerometer ketika Aktif
5.2 Pengujian Jarak dan Waktu Media Komunikasi
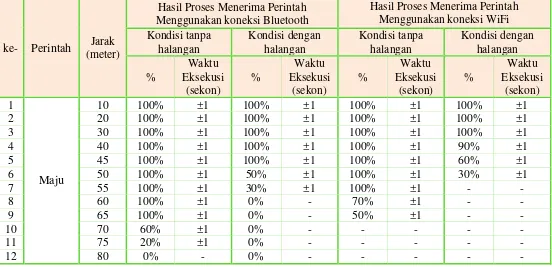
Tabel 5.1 Pengujian Jarak dan Waktu Media Komunikasi
ke- Perintah Jarak (meter)
Hasil Proses Menerima Perintah Menggunakan koneksi Bluetooth
Hasil Proses Menerima Perintah Menggunakan koneksi WiFi
Pengujian dilakukan pada jarak yang sama masing-masing pada masing-masing media komunikasi sampai 10x pengujian. % keberhasilan di dapat dari rumus:
Dari data pada Tabel 5.1 di atas, di dapat bahwa: 1. Bluetooth
a. Kondisi tanpa halangan
Bluetooth dapat menerima perintah dengan persentase 100% sampai pada jarak 65 meter dan waktu eksekusi setiap perintah ±1 detik. Sedangkan pada jarak 75 meter masih dapat menerima perintah tapi %keberhasilannya hanya 20% dan waktu yang diperlukan untuk mengeksekusi perintah ±1 detik. Dan pada pengujian dengan jarak 80 meter koneksi langsung terputus.
b. Kondisi dengan halangan
Bluetooth dapat menerima perintah dengan persentase 100% sampai pada jarak 45 meter dan waktu eksekusi setiap perintah ±1 detik. Sedangkan pada jarak 55 meter masih dapat menerima perintah tapi %keberhasilannya hanya 30% dan waktu yang diperlukan untuk mengeksekusi perintah ±1 detik. Dan pada pengujian dengan jarak 60 meter koneksi langsung terputus.
2. WiFi
a. Kondisi tanpa halangan
b. Kondisi dengan halangan
WiFi dapat menerima perintah dengan persentase 100% sampai pada jarak 30 meter dan waktu eksekusi ±1 detik. Sedangkan pada jarak 50 meter masih dapat menerima perintah tapi %keberhasilannya hanya 30% dan waktu yang diperlukan untuk mengeksekusi perintah ±1 detik. Dan pada pengujian dengan jarak 55 meter koneksi langsung terputus.
5.3 Pengujian Inputan Perintah Terhadap Media Komunikasi
Pengujian inputan perintah terhadap media komunikasi meliputi: pengujian screen button pada Bluetooth dan WiFi dan pengujian accelerometer pada Bluetooth dan WiFi.
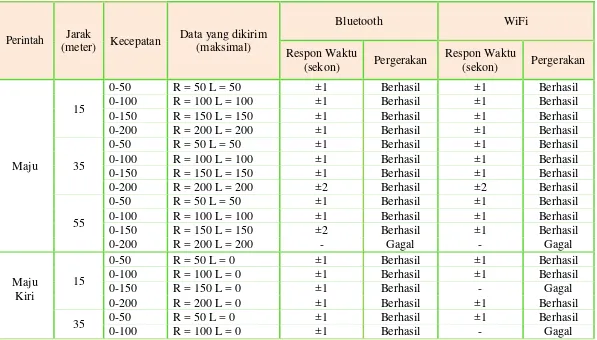
5.3.1 Pengujian Screen Button pada Bluetooth dan WiFi
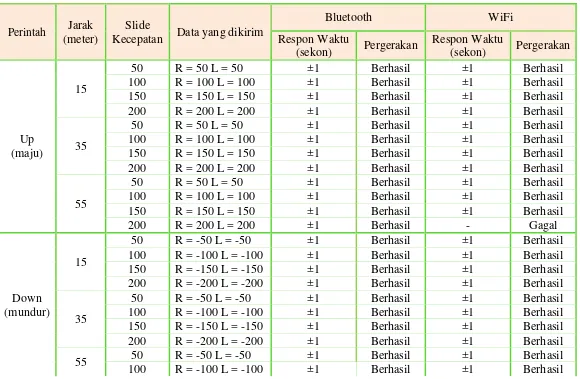
Dibawah ini akan diuji antara inputan perintah screen button pada Bluetooth dan WiFi. Pada pengujian ini, ada empat inputan yang akan diuji yaitu: maju, mundur, kiri dan kanan. Inputan perintah-perintah tersebut akan diuji pada jarak 15 meter, 35 meter dan pada jarak 55 meter. Bukan hanya itu saja, pada ketiga jarak tersebut akan diuji juga pengiriman inputan perintah jada kecepatan 50, 100, 150, dan kecepatan 200.
Tabel 5.2 Pengujian Screen Button pada Bluetooth dan WiFi
Perintah Jarak (meter)
Slide
Kecepatan Data yang dikirim
Setelah dilakukannya pengujian jarak maksimal kerja Bluetooth dan WiFi, maka jarak kerja yang dipakai dalam pengujian diatas adalan maksimal 55 meter.
Contoh data yang dikirim adalah R = 0 L = 200, artinya motor dc kanan akan bergerak maju dengan PWM=0 sedangkan motor dc kiri akan bergerak maju juga dengan PWM= 200. Defenisi berhasil maksudnya adalah berhasil bergerak sesuai perintah yang diberikan sedangkan defenisi gagal, tidak bergerak sesuai perintah. Respon waktu menggunakan Bluetooth ataupun WiFi sama saja ±1 sekon.
Dari data pada Tabel 5.2 , di dapat bahwa. 1. Media Komunikasi Bluetooth
a. Perintah Up (maju)
Pengujian perintah maju pada jarak 15, 35 dan 55 dengan kecepatan 50,100,150 dan 200 memiliki persentase keberhasilan mencapai 100% .
b. Perintah Down (mundur)
Pengujian perintah mundur pada jarak 15, 35 dan 55 dengan kecepatan 50,100,150 dan 200 memiliki persentase keberhasilan mencapai 100%.
c. Perintah Left (kiri)
Pengujian perintah kiri pada jarak 15, 35 dan 55 dengan kecepatan 50,100,150 dan 200 memiliki persentase keberhasilan mencapai 91,67%. Hal tersebut dikarenakaan terjadi kegagalan dalam pengiriman perintah pada pengujian dengan jarak 45meter dan kecepatan 50.
d. Perintah Right (kanan)
2. Media Komunikasi WiFi a. Perintah Up (maju)
Pengujian perintah maju pada jarak 15, 35 dan 55 dengan kecepatan 50,100,150 dan 200 memiliki persentase keberhasilan mencapai 91,67%. Hal tersebut dikarenakaan terjadi kegagalan dalam pengiriman perintah pada pengujian dengan jarak 45meter dan kecepatan 200.
b. Perintah Down (mundur)
Pengujian perintah mundur pada jarak 15, 35 dan 55 dengan kecepatan 50,100,150 dan 200 memiliki persentase keberhasilan mencapai 100%.
c. Perintah Left (kiri)
Pengujian perintah kiri pada jarak 15, 35 dan 55 dengan kecepatan 50,100,150 dan 200 memiliki persentase keberhasilan mencapai 91,67%. Hal tersebut dikarenakaan terjadi kegagalan dalam pengiriman perintah pada pengujian dengan jarak 45meter dan kecepatan 150.
d. Perintah Right (kanan)
Pengujian perintah mundur pada jarak 15, 35 dan 55 dengan kecepatan 50,100,150 dan 200 memiliki persentase keberhasilan mencapai 91,67%. Hal tersebut dikarenakaan terjadi kegagalan dalam pengiriman perintah pada pengujian dengan jarak 45meter dan kecepatan 100.
5.3.2 Pengujian Accelerometer pada Bluetooth dan WiFi
inputan perintah menggunakan accelerometer terdapat Sembilan perintah inputan, yaitu: maju lurus, maju kanan, maju kiri, mundur lurus, mundur kanan, mundur kiri, pivot kanan, pivot kiri, dan berhenti (stop).
Accelerometer memberikan kecepatan menurut kemiringannya, semakin tinggi kemiringan yang diberikan maka robot mobil juga akan bergerak makin kencang. Nilai accelerometer akan diambil setiap 200ms, dan itu akan selalu secara kontinyu dikirimkan kepada motor pada robot mobil.
Pivot
Kanan 55
0-100 R = -100 L = 100 ±1 Berhasil ±1 Berhasil
0-150 R = -150 L = 150 ±2 Berhasil ±2 Berhasil
0-200 R = -200 L = 200 - Gagal - Gagal
Berrhenti
15
0-50 R = 0 L = 0 ±1 Berhasil ±1 Berhasil
0-100 R = 0 L = 0 ±1 Berhasil ±1 Berhasil
0-150 R = 0 L = 0 ±1 Berhasil ±1 Berhasil
0-200 R = 0 L = 0 ±1 Berhasil ±1 Berhasil
35
0-50 R = 0 L = 0 ±1 Berhasil ±1 Berhasil
0-100 R = 0 L = 0 ±1 Berhasil ±1 Berhasil
0-150 R = 0 L = 0 ±1 Berhasil ±1 Berhasil
0-200 R = 0 L = 0 ±1 Berhasil ±1 Berhasil
55
0-50 R = 0 L = 0 ±1 Berhasil ±1 Berhasil
0-100 R = 0 L = 0 ±1 Berhasil ±1 Berhasil
0-150 R = 0 L = 0 ±1 Berhasil ±1 Berhasil
Dari data pada Tabel 5.3, di dapat bahwa: 1. Media Komunikasi Bluetooth
a. Perintah Maju Lurus
Pengujian perintah maju pada jarak 15, 35 dan 55 dengan kecepatan 50, 0-100, 100-150 dan 0-200 memiliki persentase keberhasilan mencapai 91,67%. Hal tersebut dikarenakaan terjadi kegagalan dalam pengiriman perintah pada pengujian jarak 55meter dengan kecepatan 0-200. Respon waktu berbeda2. Semakin jauh dan semakin besar kecepatan yang diberikan maka kecepatan respon waktu akan semakin lama.
b. Perintah Maju Kiri
Pengujian perintah maju kiri pada jarak 15, 35 dan 55 dengan kecepatan 0-50, 0-100, 100-150 dan 0-200 memiliki persentase keberhasilan mencapai 100%. Respon waktu berbeda2.
c. Perintah Maju Kanan
Pengujian perintah maju kanan pada jarak 15, 35 dan 55 dengan kecepatan 0-50, 0-100, 100-150 dan 0-200 memiliki persentase keberhasilan mencapai 91,67%. Hal tersebut dikarenakaan terjadi kegagalan dalam pengiriman perintah pada pengujian dengan jarak 55meter dengan kecepatan 0-200. Respon waktu berbeda2.
d. Perintah Mundur Lurus
e. Perintah Mundur Kiri
Pengujian perintah mundur kiri pada jarak 15, 35 dan 55 dengan kecepatan 0-50, 0-100, 100-150 dan 0-200 memiliki persentase keberhasilan mencapai 83,33%. Hal tersebut dikarenakaan terjadi kegagalan dalam pengiriman perintah pada pengujian dengan jarak 25meter dengan kecepatan 0-200 dan pada jarak 55meter dengan kecepatan 0-200. Respon waktu berbeda2.
f. Perintah Mundur Kanan
Pengujian perintah mundur kanan pada jarak 15, 35 dan 55 dengan kecepatan 0-50, 0-100, 100-150 dan 0-200 memiliki persentase keberhasilan mencapai 100%. Respon waktu berbeda2.
g. Perintah Pivot Kiri
Pengujian perintah pivot kiri pada jarak 15, 35 dan 55 dengan kecepatan 0-50, 0-100, 100-150 dan 0-200 memiliki persentase keberhasilan mencapai 91,67%. Hal tersebut dikarenakaan terjadi kegagalan dalam pengiriman perintah pada jarak 55meter dengan kecepatan 0-200. Respon waktu berbeda2.
h. Perintah Pivot Kanan
i. Berhenti
Pengujian perintah mundur lurus pada jarak 15, 35 dan 55 dengan kecepatan 0-50, 0-100, 100-150 dan 0-200 memiliki persentase keberhasilan mencapai 100%. Respon waktu berbeda2.
2. Media Komunikasi WiFi a. Perintah Maju
Pengujian perintah maju pada jarak 15, 35 dan 55 dengan kecepatan 50, 0-100, 100-150 dan 0-200 memiliki persentase keberhasilan mencapai 91,67%. Hal tersebut dikarenakaan terjadi kegagalan dalam pengiriman perintah pada pengujian dengan jarak 55meter dengan kecepatan 0-200. Respon waktu berbeda2.
b. Perintah Maju Kiri
Pengujian perintah maju kiri pada jarak 15, 35 dan 55 dengan kecepatan 0-50, 0-100, 100-150 dan 0-200 memiliki persentase keberhasilan mencapai 83,33%. Hal tersebut dikarenakaan terjadi kegagalan dalam pengiriman perintah pada pengujian dengan jarak 15meter dengan kecepatan 0-150 dan pada jarak 35meter dengan kecepatan 0-100. Respon waktu berbeda2.
c. Perintah Maju Kanan
d. Perintah Mundur Lurus
Pengujian perintah mundur lurus pada jarak 15, 35 dan 55 dengan kecepatan 0-50, 0-100, 100-150 dan 0-200 memiliki persentase keberhasilan mencapai 83,33%. Hal tersebut dikarenakaan terjadi kegagalan dalam pengiriman perintah pada pengujian pada jarak 55meter dengan kecepatan 0-150 dan 0-200. Respon waktu berbeda2.
e. Perintah Mundur Kiri
Pengujian perintah mundur kiri pada jarak 15, 35 dan 55 dengan kecepatan 0-50, 0-100, 100-150 dan 0-200 memiliki persentase keberhasilan mencapai 83.33%. Hal tersebut dikarenakaan terjadi kegagalan dalam pengiriman perintah pada pengujian dengan jarak 45meter dengan kecepatan 50-100 dan 150-200. Respon waktu berbeda2.
f. Perintah Mundur Kanan
Pengujian perintah mundur kanan pada jarak 15, 35 dan 55 dengan kecepatan 0-50, 0-100, 100-150 dan 0-200 memiliki persentase keberhasilan mencapai 100%. Respon waktu berbeda2.
g. Perintah Pivot Kiri
h. Perintah Pivot Kanan
Pengujian perintah pivot kanan pada jarak 15, 35 dan 55 dengan kecepatan 0-50, 0-100, 100-150 dan 0-200 memiliki persentase keberhasilan mencapai 83,33%. Hal tersebut dikarenakaan terjadi kegagalan dalam pengiriman perintah pada pengujian jarak 35meter pada kecepatan 0-200 dan pada jarak 55meter dengan kecepatan 0-200. Respon waktu berbeda2.
i. Berhenti
Pengujian perintah mundur lurus pada jarak 15, 35 dan 55 dengan kecepatan 0-50, 0-100, 100-150 dan 0-200 memiliki persentase keberhasilan mencapai 100%. Respon waktu berbeda2.
Diatas telah dilakukan dua kali pengujian, baik itu pengujian screen button
pada Blutooth dan WiFi pada Tabel 5.2 maupun pengujian accelerometer pada Bluetooth dan WiFi pada Tabel 5.3 . Maka dibawah ini akan dipaparkan persentase keberhasilan dari keduanya.
Tabel 5.4 Persentase Keberhasilan Pengujian
Perintah Screen Button Accelerometer
Bluetooth WiFi Bluetooth WiFi
Maju 100% 91,67% 91,67% 91,67%
Mundur 100% 100% 100% 83,33%
Kiri 91,67% 91,67% 100% 83,33%
Kanan 100% 91,67% 91,67% 91,67%
Mundur kiri - - 83,33% 83,33%
Mundur kanan - - 100% 100%
Pivot kiri - - 91,67% 83,33%
Pivot kanan - - 83,33% 83,33%
Berhenti - - 100% 100%
Rata-rata 97,92% 93,75% 93,52% 88,89%
%inputan perintah 95,84% 91,20%
Dari data pada Tabel 5.4 dapat diketahui bahwa:
1. Inputan Perintah menggunakan screen button memiliki persentase keberhasilan mencapai 95,84%.
2. Inputan Perintah menggunakan accelerometer memiliki persentase keberhasilan mencapai 91,20%.
3. Media komunikasi menggunakan Bluetooth memiliki persentase keberhasilan mencapai 95,72%. Lebih stabil dibanding dengan WiFi.
4. Media komunikasi menggunakan WiFi memiliki persentase keberhasilan 91,32%.
5.4 Perbandingan Penggunaan Arus pada Bluetooth dan WiFi
Dalam bagian ini akan dibandingkan penggunaan arus pada Bluetooth dan pada WiFi. Besarnya arus yang dipakai ketika stanby, connect (kirim data) dan
connect (tidak kirim data).
Tabel 5.5 Perbandingan Penggunnaan Arus pada Bluetooth dan WiFi
Kondisi
Arus(mA)
Bluetooth WiFi
1M 5M 10M 1M 5M 10M
Idle (stanby) 22,5~39,5 68
Connect (kirim data) 20,5 22,1 24,1 140~150 Connect (tidak kirim
data) 3,8 4,8 5,8 120
Range Pemakaian
Arus 3,8~39,5 68~150
5.5 Perbandingan Media Komunikasi
Dari semua pengujian-pengujian yang telah dilakukan pada media komunikasi Bluetooth dan WiFi maka dapat dirangkum setiap hasil yang di dapat dari pengujian-pengujian tersebut. Dibawah ini mwerupakan tabel perbandingan hasil pengujian antara Bluetooth dan WiFi.
Tabel 5.6 Perbandingan Hasil Pengujian Antara Bluetooth dan WiFi
Perbadingan Bluetooth WiFi
Jarak tanpa halangan 65 meter 55 meter Jarak dengan halangan 45 meter 30 meter
Pemakaian Arus 3,8~39,5 mA 68~150 mA
Respon Waktu ±1-2 detik ±1-2 detik
74
BAB VI
PENUTUP
6.1 Kesimpulan
Berdasarkan hasil penelitian dan analisa yang dilakukan pada bab V, maka dapat ditarik kesimpulan.
1. Aplikasi berbasis Android ini berhasil mengendalikan robot mobil dengan media komunikasi Bluetooth dan WiFi serta pengontrolan input perintah dengan menggunakan screen button dan Accelerometer.
2. Jarak kerja Bluetooth sampai pada 65 meter dengan kondisi tanpa halangan dan 45 meter dengan halangan sedangkan WiFi saat kondisi tanpa hangan hanya sampai pada 55 meter dan kondisi dengan halangan hanya sampai pada jarak 30 meter.
3. Media komunikasi yang lebih cocok digunakan dalam mengontrol mobil adalah Bluetooth, karena jarak jangkauannya lebih jauh, persentase keberhasilannya lebih besar dari WiFi yaitu 95,72% , pemakaian arusnya lebih sedikit, dan respon waktu dalam mengirimkan data tidak jauh berbeda dengan menggunakan WiFi.
6.2 Saran
Untuk mengoptimalkan kinerja aplikasi yang dapat mengontrol robot mobil ini, maka ada beberapa usulan saran yang dapat dipertimbangkan.
1. Perancangan dalam memprogram accelerometer sebaiknya dibuat tombol khusus untuk menentukan posisi awal.
PADA SMARTPHONE ANDROID BERBASIS
TEKNOLOGI NIRKABEL
Sitiuran Simanungkalit
Teknik Elektro, Fakultas Teknik dan Ilmu Komputer, UNIKOM Jl. Dipatiukur 114-117, Bandung
Email: [email protected]
ABSTRAK
Tugas akhir ini merupakan perancangan sebuah aplikasi pada smartphone Android yang berfungsi sebagai remote control yang dapat mengontrol pergerakan sebuah robot mobil. Robot mobil menggunakan dua media komunikasi yaitu Bluetooth dan WiFi dan juga dua jenis inputan perintah yaitu
screen button dan accelerometer. Kedua media komunikasi dan inputan perintah tersebut akan dikomparasi untuk dapat menentukan pengontrolan yang paling tepat.
Dari hasil analisa dan pengujian alat, persentase keberhasilan inputan perintah screen button
95,84% dan accelerometer 91,20%. Sedangkan media komunikasi Bluetooth memiliki persentase keberhasilan 95,72% dan WiFi 91,32%.
Kata Kunci: Android, Robot mobil, Accelerometer, Bluetooth, WiFi
1. PENDAHULUAN
1.1 Latar Belakang
Salah satu teknologi yang sedang berkembang pesat saat ini adalah Android. Android merupakan salah satu dari berbagai macam sistem operasi pada telepon seluler.
Telepon seluler berbasis Android dijuluki sebagi telepon pintar atau lebih sering disebut sebagai smartphone. Dikatakan sebagai telepon pintar karena kepintaran dan kelengkapan fitur-fitur yang dimilikinya membuat telepon seluler ini memiliki fungsi ganda atau multifungsi. Tidak hanya sekedar berfungsi mengirim pesan menerima telepon, tapi dapat mengambil gambar, merekam, menemukan lokasi, dapat terkoneksi dengan internet 24 jam, bahkan dapat memiliki fungsi sebagai remote control.
Karena kepintaran yang dimilikinya inilah yang membuat smartphone Android layak untuk dipelajari, diteliti dan dikembangkan. Fungsi yang akan diuji dan dipelajari dalam tugas akhir ini adalah fungsinya sebagai remote control
yang dapat mengontrol suatu perangkat atau piranti.
Pada umumnya sistem sebuah robot diatur oleh mikrokontroler. Dan untuk melakukan suatu sistem tertentu atau dalam kondisi tertentu sebuah robot memerlukan sebuah prosesor untuk mengatur kinerja sebuah mikrokontroler. Pada
tugas akhir ini smartphone Android akan digunakan sebagai otak pemrosesannya dan robot mobil dipilih sebagai disain robotnya.
Dalam tugas akhir ini pengujian dan pembelajaran mengenai fungsi smartphone
Android sebagai remote control bukan hanya membuat aplikasi yang dapat mengontrol sebuah robot mobil saja, tapi melakukan studi komparasi atas fitur-fitur yang dimilikinya dalam mengontrol robot mobil, untuk mengatasi kesulitan dalam memilih media komunikasi dan inputan perintah yang paling cocok digunakan dalam mengontrol sebuah robot mobil. Fitur-fitur yang akan dikomparasi yaitu, media komunikasi Bluetooth dan WiFi yang umum ada pada
smartphone. Satu lagi yang akan dikomparasi yaitu inputan perintah dengan menggunakan
screen button dan accelerometer. Oleh karena itu, tugas akhir ini diberi judul “Studi Komparasi Pengontrol Robot Mobil Pada Smartphone Android Berbasis Teknologi Nirkabel”.
1.2 Identifikasi Masalah
Berdasarkan latar belakang yang telah diuraikan, maka dapat diidentifikasikan beberapa masalah yaitu sebagai berikut.
diluar HP Android seperti mengontrol robot mobil.
2. Kesulitan dalam menentukan pengendalian mana yang paling cocok digunakan dalam mengontrol robot mobil baik dari media komunikasi menggunakan Bluetooth atau WiFi maupun dari inputan perintah menggunakan screen button atau accelerometer.
1.3 Rumusan Masalah
Berdasarkan identifikasi masalah diatas, maka rumusan masalah dalam penelitian ini adalah.
1. Bagaimana membuat aplikasi yang dapat mengontrol pergerakan sebuah robot mobil sederhana?
2. Bagaimana menentukan pengendalian mana yang paling cocok digunakan dalam mengontrol robot mobil menggunakan Bluetooth dan WiFi sebagai media komunikasi dan screen button dan accelerometer sebagai inputan perintah?
1.4 Tujuan
Tujuan penelitian ini adalah sebagai berikut.
1. Membuat aplikasi yang dapat mengontrol pergerakan sebuah robot mobil sederhana. 2. Menentukan pengendalian mana yang paling
cocok digunakan dalam mengontrol robot mobil menggunakan Bluetooth dan WiFi sebagai media komunikasi dan screen button
dan accelerometer sebagai inputan perintah.
1.5 Batasan Masalah
Beberapa batasan yang digunakan dalam penelitian adalah sebagai berikut.
1. Platform Android yang digunakan adalah versi 2.3 (Gingerbread).
2. Mikrokontroler menggunakan ATmega164p. 3. Pemilihan WiFi atau Bluetooth pada robot
mobil menggunakan switch.
4. Media komunikasi nirkabel yang akan dibandingkan adalah Bluetooth dan WiFi (media komunikasi standar smartphone
Android).
5. Jenis inputan perintah yang akan dibandingkan adalah screen button dan accelerometer.
Robot adalah sebuah alat mekanik yang dapat melakukan tugas fisik, baik menggunakan pengawasan dan kontrol manusia, ataupun menggunakan program yang telah didefinisikan terlebih dulu (kecerdasan buatan).
2.2. Android
Android adalah sebuah sistem operasi berbasis Linux yang dirancang untuk mobile device seperti smartphone dan komputer
tablet. Sistem operasi mobile ini awalnya dikembangkan oleh Android Inc yang merupakan sebuah perusahaan yangh telah dibeli oleh Google pada tahun 2005. Android menyediakan platform terbuka bagi para pengembang buat menciptakan aplikasi. Sistem operasi Android terdiri dari 12 juta baris kode termasuk 3 juta baris XML, 2.8 juta baris C, 2.1 juta baris Java , dan 1.75 juta baris C + + .
Kebutuhan Sistem Software
Untuk membuat aplikasi Android,yang dipersiapkan terlebih dahulu adalah sebagai berikut.
1. Java JDK (Java Development Kit) & JRE
(Java Runtime Environment)
Sesuai yang disyaratkan pada System Requirements Android, diharuskan menginstal JDK terlebih dahulu. Karena apabila hanya menginstal JRE, maka tidak cukup (JRE alone is not sufficient).
2. Android SDK
Adalah tools API (Application Programming Interface) yang diperlukan untuk mulai mengembangkan aplikasi pada platform
Androidmenggunakan bahasa pemrograman
Java.
3. EclipseGalileo (versi 3.5)
Adalah IDE (Integrated Development Environment) Java untuk membangun aplikasi Android. Dimana juga berfungsi sebagai database.
4. ADT (Android Development Tools)/Plugins Eclipse
membuat UI aplikasi Android, yang terdiri
Accelerometer adalah sebuah tranduser yang berfungsi untuk mengukur percepatan, mendeteksi dan mengukur getaran, ataupun untuk mengukur percepatan akibat gravitasi bumi. Sensor accelerometer merupakan sebuah sensor gerak yang memiliki berbagai macam fungsi, salah satu fungsinya yaitu untuk mendefinisikan apakah ponsel berada di mode landscape atau
portrait, sehingga user interface layar menyesuaikan dengan kondisi ponsel, auto deteksi sewaktu pengambilan foto dalam mode
landscape atau portrait, mendeteksi suatu getaran suatu pengambilan foto, dan lain-lain. Fungsi yang lain juga digunakan sebagai sensor untuk bermain game.
2.4. Bluetooth
Bluetooth adalah sebuah teknologi nirkabel dengan menggunakan media gelombang radio yang bekerja pada frekuensi 2.4 GHz. Teknologi
Bluetooth mempunyai kecepatan maksimum 1 Mbps.
2.5. WiFi (Wireless Fidelity)
Istilah “WiFi” dipakai dalam bahasa
Inggris umum sebagai sinonim WLAN (Wireless Local Area Network). Wifi adalah sebuah teknologi terkenal yang memanfaatkan peralatan elektronik untuk bertukar datas ecara nirkabel (menggunakan gelombang radio).
WiFi dirancang berdasarkan spesifikasi IEEE 802.11. Sekarang ini ada empat variasi dari 802.11, yaitu: 802.11a, 802.11b, 802.11g dan 802.11n. Spesifikasi b merupakan produk pertama Wi-Fi. Variasi g dan n merupakan salah satu produk yang memiliki penjualan terbanyak pada 2005.
2.6. Motor DC
Motor DC merupakan peralatan elektromekanik dasar yang berfungsi untuk mengubah tenaga listrik menjadi tenaga mekanik. Secara umum, kecepatan putaran poros motor DC akan meningkat seiring dengan meningkatnya tegangan yang diberikan. Dengan demikian,
2.7. PWM (Pulse Widht Modulation)
PWM (Pulse width Modulation), adalah sebuah metode untuk pengaturan kecepatan perputaran, dalam hal ini adalah motor DC untuk gerak robot.
Pada robot ini, metode PWM dikerjakan oleh mikrokontroler. Metode PWM ini akan mengatur lebar atau sempitnya periode pulsa aktif yang dikirimkan oleh mikrokontroler ke driver motor. Pada pengaturan kecepatan robot, nilai PWM mulai dari 0-255. Secara analog
besaran PWM dihitung dalam prosentase, nilai ini didapat dari perbandingan: T high / (T high + T low ) * 100%. Dimana T adalah periode atau waktu tempuh untuk sebuah pulsa, yang terbagi menjadi bagian puncak positif (T high) dan puncak negatif (T low).
Gambar 2.1 Ilustrasi persentasi PWM
Semakin rapat periode antar pulsa, maka frekuensi yang dihasilkan akan semakin tinggi, ini berarti kecepatan akan bertambah. Semakin lebar jarak antar pulsa, maka frekuensi semakin rendah ini berarti kecepatan berkurang atau menurun. Kondisi pemberian kecepatan harus disesuaikan dengan kondisi track yang akan dilewati oleh robot, misal pada saat jalan lurus, naik atau turun harus mendapatkan nilai PWM yang tepat.
3. PERANCANGAN ALAT
Perancangan pengendalian nirkabel robot mobil menggunakan smartphone Android ini didahului dengan perancangan diagram blok sistem. Diagram blok sistem dapat dilihat pada Gambar 3.1 di bawah ini.