NAVIGASI MOBIL ROBOT RC BERBASIS APLIKASI ANDROID Iwan FitriantoRahmad, Vidi Agung Fragastia
Dosen Teknik Informatika STMIK Potensi Utama
STMIK Potensi Utama, Jl. K.L Yos Sudarso Km. 6,5 No.3A Tanjung Mulia Medan Email : [email protected], [email protected]
ABSTRACT
Most of the android smartphone users just as users only, not to develop or maximize its use , in hardware or software usage ( applications ). If done towards the development of android smartphone will be more then one of them is its usefulness as a car navigation robot. Communication via bluetooth , android smartphone can communicate with microcontroller in the form of controlling a robot that resembles a car . Navigation can be done by pressing the button the image direction forward, backward, left and right can also use the display accelerometer that works just smartphones tilt forward, backward, left and right just making it easier to navigate . In the microcontroller is already available RAM , ROM or EPROM , timer , oscillator , ADC , buffer I/O ports, the data channel so it can work and be able to do the connection between the microcontroller device with android smartphone via Bluetooth.
Keywords: Navigation, Android Smartphone, Bluetooth, Car Robots, RC
ABSTRAKSI
Kebanyakan dari pemakai smartphone android hanya sebagai pengguna saja, tidak melakukan pengembangan ataupun memaksimalkan penggunaannya, secara hardware ataupun penggunaan software (aplikasi). Jika dilakukan pengembangan terhadap smartphone android maka akan lebih banyak lagi kegunaannya salah satunya adalah sebagai navigasi mobil robot. Melalui komunikasi bluetooth, smartphone android dapat berkomunikasi dengan mikokontroler dalam bentuk pengendalian robot yang menyerupai mobil. Navigasi yang dilakukan dapat berupa tombol dengan menekan arah gambar tersebut kedepan, belakang, kekiri dan kekanan dapat juga menggunakan tampilan accelerometer yang cara kerjanya hanya memiringkan smartphone kedepan, belakang, kiri dan kanan saja sehingga memudahkan dalam bernavigasi. Didalam mikrokontroler tersebut telah tersedia RAM, ROM atau EPROM, timer, oscilator, ADC, buffer I/O port , saluran data sehingga dapat bekerja dan mampu melakukan koneksi antar perangkat mikrokontroler dengan smartphone android melalui Bluetooth
Kata kunci : Navigasi, Smartphone Android, Bluetooth, Mobil Robot, RC
I. PENDAHULUAN
Kebanyakan dari pemakai smartphone android hanya sebagai pengguna saja, tidak melakukan pengembangan ataupun memaksimalkan penggunaannya, secara hardware ataupun penggunaan software (aplikasi). Sehingga smartphone android lebih banyak lagi kegunaannya salah satunya adalahnya sebagai remote control mobil robot. Untuk memaksimalkan penggunaan smartphone android dan menggabungkannya dengan teknologi mikrokontroler (arduino). Melalui komunikasi bluetooth, smartphone android dapat berkomunikasi dengan mikokontroler dalam bentuk pengendalian robot yang menyerupai mobil.
Dimana di dalam mikrokontroler tersebut telah terdapat RAM, ROM atau EPROM, timer, oscilator, ADC, buffer I/O port , saluran data sehingga dapat bekerja dan mampu melakukan koneksi antar perangkat mikrokontroler (arduino) dengan smartphone android melalui Bluetooth dan menganalisanya.
II. PERANGKAT PENDUKUNG
a. Smartphone Android
Pengertian Android adalah sistem operasi berbasis Linux yang dipergunakan sebagai pengelola sumber daya perangkat keras, baik untuk ponsel, smartphone dan juga PC tablet. Secara umum Android adalah platform yang terbuka (Open Source) bagi para pengembang untuk menciptakan aplikasi mereka sendiri untuk digunakan oleh berbagai piranti bergerak. Telepon pertama yang memakai sistem operasi Android adalah HTC Dream, yang dirilis pada 22 Oktober 2008. Pada penghujung tahun 2009 diperkirakan di dunia ini paling sedikit terdapat 18 jenis telepon seluler yang menggunakan Android.
Semenjak kehadirannya pada 9 Maret 2009, Android telah hadir dengan versi 1.1, yaitu sistem operasi yang sudah dilengkapi dengan pembaruan estetis pada apalikasinya, seperti jam alarm, voice search, pengiriman pesan dengan Gmail, dan pemberitahuan email. Hingga tahun 2013, Android telah berkembang dengan pesat. Dalam kurun 3 tahun Android telah diproduksi dalam versi, dan versi terakhir yang diproduksi disebut sebagai Android versi 4.1.2 atau Android Jelly Bean.
Gambar 1. Smartphone Android
b. Module Bluetooth
Module bluetooth merupakan alat penghubung antara smartphone android dengan perangkat yang ada pada sepeda motor. Module bluetooth ini juga dapat berkomunikasi secara dua arah.
Bluetooth adalah sebuah teknologi antarmuka radio yang beroperasi dalam pita frekuensi 2,4 Ghz unlincensed ISM (Industrial, Scientific an Medical) yang mampu menyediakan layanan komunikasi data dan suara secara real-time antara host-host Bluetooth dengan jarak jangkauan layanan yang terbatas (sekitar 10 meter) dengan kecepatan transfer data 723,2 Kbps. Pengembangan teknologi ini dipromotori oleh lima perusahaan yaitu Erricson, IBM, intel nokia dan Toshiba yang membentuk sebuah Special Interest Group (SIG) pada bulan mei 1998. Teknologi Bluetooth tidak dirancang untuk melakukan komunikasi data dan suara yang memerlukan kapasitas yang besar. Karena bluetooth dapat menggantikan LAN, WAN maupun kabel backbone. Teknologi Bluetooth memang khusus dirancang unutk mendukung pengguna peralatan mobile seperti notebook beserta peralatan pendukungnya seperti printer, scanner, maouse dan peralatan komunikasi seperti ponsel dan PDA.
c. Arduino
Beberapa versi yang cukup banyak tersedia di pasaran lokal, diantaranya adalah versi Arduino Duemilanove yang disebut sebagai Arduino 2009, versi Arduino Uno yang disebut sebagai Arduino 2010, dan Arduino Mega yang memiliki kapasitas memori dan kaki I/O yang lebih banyak. Pada dasarnya, bagian-bagian komponen dari Arduino Duemilanove dan Arduino Uno sama, hanya berbeda pada IC konverter USB ke serialnya
Gambar 3. Minimum Sistem Arduino Uno R3
Keterangan: 1. Port USB
2. IC Konverter Serial-USB (ATmega 8 U2) 3. Led untuk test output kaki D13
4. Kaki-kaki Input Output Digital (D8 – D13) 10.Kaki-kaki catu daya (5V, GND) 11.Terminal Catudaya (6 – 9V)
Arduino yang akan dipergunakan adalah Arduino yang sudah mengalami modifikasi sehingga ada perbedaan tampilan kit Arduino Uno dengan yang digunakan dalam membuat mobil robot akan tetapi semua fungsi dan kegunaan sama dikarena sudah menggunakan “Bootloader” yang sama juga.
III. PERANCANGAN
1. Minimum Sistem Rangkaian ATMEGA8
resistor 10K Ohm bekerja sebagai “power on reset” bagi mikrokontroler ATMEGA32 dan kristal 16MHZ bekerja sebagai penentu nilai clock kepada mikrokontroler dan kapasitor 22 µF bekerja sebagai resistor terhadap Kristal yang ditunjukkan oleh gambar berikut ini :
Gambar 4. Rangkaian Mininum Sistem Mikrokontroler
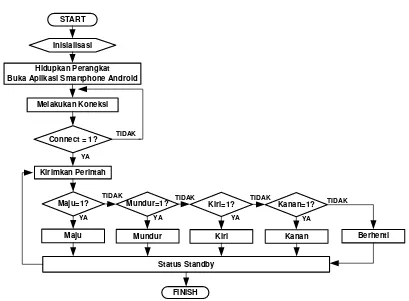
2. Sistem Kerja Perangkat
START
Inisialisasi
Hidupkan Perangkat Buka Aplikasi Smartphone Android
Connect = 1?
Kirimkan Perintah Melakukan Koneksi
Maju=1?
YA
TIDAK
YA
TIDAK
Mundur=1? TIDAK Kiri=1? TIDAK Kanan=1?
YA YA YA
Status Standby
FINISH
Maju Mundur Kiri Kanan Berhenti
TIDAK
Keterangan 1. Start.
2. Inisialisasi Perangkat, ini dimaksudkan apakah perangkat sudah terpasang dengan benar sesuai dengan skematik rangkaian.
3. Hidupkan perangkat, dengan memberikan tegangan pada rangkaian serta mengaktifkan saklar. Jalankan juga aplikasi pada smartphone android.
4. Melakukan proses koneksi bluetooth antara perangkat dengan aplikasi pada smartphone android.
5. Jika proses koneksi bluetooth dengan aplikasi pada smartphone android berhasil maka aplikasi bisa mengirimkan data ke perangkat, jika belum maka proses koneksi akan diulang kembali.
6. Jika perintah yang dikirimkan “maju”, maka perangkat akan mengeksekusi dengan menjalankan motor sehingga mobil robot bergerak maju, hidupkan lampu LED dan buzzer hingga perintah berhenti dikirim.
7. Jika perintah yang dikirimkan “mundur”, maka perangkat akan mengeksekusi dengan menjalankan motor sehingga mobil robot bergerak mundur, hidupkan lampu LED dan buzzer hingga perintah berhenti dikirim.
8. Jika perintah yang dikirimkan “kiri”, maka perangkat akan mengeksekusi dengan menjalankan motor sehingga mobil robot bergerak kiri, hidupkan lampu LED dan buzzer hingga perintah berhenti dikirim.
9. Jika perintah yang dikirimkan “kanan”, maka perangkat akan mengeksekusi dengan menjalankan motor sehingga mobil robot bergerak kanan, hidupkan lampu LED dan buzzer hingga perintah berhenti dikirim.
10. Jika tidak ada perintah yang dikirimkan oleh aplikasi pada smartphone android, mobil robot akan berhenti atau pada posisi diam.
11. Perangkat akan berada pada posisi standby atau posisi dimana perangkat siap menerima perintah.
12. Finish
3. Software Arduino IDE
Instalasi merupakan hal yang sangat penting karena merupakan proses penginputan data dari komputer ke dalam mikrokontroler. Sebelum melakukan proses ini, hubungkan terlebih dahulu antara komputer dengan perangkat melalui kabel USB. Software Arduino GUI yang digunakan adalah software Arduino GUI versi 0022. Dalam proses menggunakan aplikasi
Arduino GUI dapat dilakukan dengan menjalankan software Arduino GUI atau mengklik icon . Setelah program melakukan load maka akan terlihat bentuk tampilan seperti gambar.
Contoh program yang digunakan pada penerima data dari Bluetooth RC berikut: void loop() {
if (Serial.available() > 0) { incomingByte = Serial.read(); if(incomingByte == 'f') { digitalWrite(LED1, LOW); Serial.println("FORWARD"); }
if(incomingByte == 'b') { digitalWrite(LED1, HIGH); Serial.println("BACKWARD"); }}}
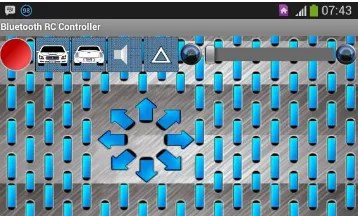
Aplikasi yang digunakan pada smartphone android adalah apk Bluetooth RC Controller yang dapat didownload pada Play Store .
Gambar 7. Icon Bluetooth RC
APK (Android PacKage) yang digunakan mempunyai 2 tampilan navigasi yaitu Tombol dan Accelerometer.
Gambar 8. Pilihan Menu Bluetooth RC
Perbedaan antara tampilan navigasi tersebut hanya terletak pada fungsi dari perangkat tersebut dimana jika kita menggunakan navigasi tombol maka kita harus menekan tombol sesuai dengan tampilan gambar yang menunjukkan fungsinya sedangkan jika kita menggunakan navigasi accelerometer maka kita hanya memiringkan smartphone kearah yang kita inginkan dan secara langsung akan mengirimkan data layaknya seperti navigasi tombol.
Gambar 10. Tampilan Aplikasi Bluetooth RC Navigasi Accelerometer
IV. HASIL PENGUJIAN
Berikut adalah hasil dari pengujian perangkat ketika perangkat dihidupkan.
Gambar 11. Berhasil Melakukan Koneksi
Setelah melakukan koneksi, perangkat akan menunggu perintah dari smartphone android seperti maju, mundur dan sebagainya. Perintah akan mengirimkan ke perangkat mobil robot samapai kondisi perintah berhenti atau tidak di tekan/miringkan.
Gambar 12. Tampilan Perintah Maju pada Navigasi Tombol
Gambar 14.Tampilan LCD pada Robot Mobil Bergerak Maju
Ketika perintah berhenti dikirim, robot akan berhenti seperti pada gambar hingga menerima perintah dari aplikasi selanjutnya.
Gambar 14. Tampilan Robot Mobil Berhenti
V. ANALISA PERANGKAT
Pengukuran jarak transmisi bertujuan untuk mengetahui seberapa jauh bluetooth dapat berhubungan dan mampu membawa perintah dari smartphone ke mikrokontroler. jarak jangkau maksimum bluetooth adalah 10 meter. Pengujian yang dilakukan dengan dua metode yaitu pengujian jarak tanpa halangan dan pengujian jarak dengan banyak halangan untuk menghambat transmisi data, seperti lemari dan perabotan rumah lainnya.
Gambar 19. Ilustrasi Pengujian Perangkat
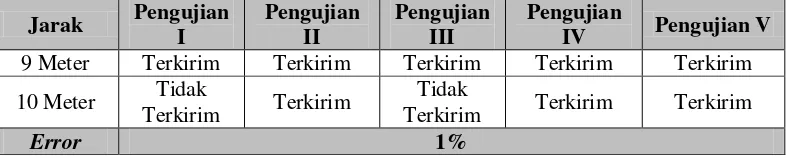
Tabel 1. Hasil Pengujian Jarak Transmisi Tanpa Halangan
Jarak Pengujian I
Pengujian II
Pengujian III
Pengujian
Jarak Pengujian 9 Meter Terkirim Terkirim Terkirim Terkirim Terkirim
10 Meter Tidak
Terkirim Terkirim
Tidak
Terkirim Terkirim Terkirim
Error 1%
Pengujian jarak tanpa halangan dilakukan sebanyak 5 kali tahap pengujian dengan jarak maksimum sejauh 10 meter. Dari hasil pengujian, pada saat perangkat mencapai jarak jangkau maksimum 10 meter, perintah yang dikirimkan smartphone tidak diterima perangkat, dari 50 kali pengirimkan perintah terdapat 2 kali gagal diterima atau sebanyak 1%.
Tabel 2. Hasil Pengujian Jarak Transmisi Dengan Rintangan
Jarak Pengujian 1 Meter Terkirim Terkirim Terkirim Terkirim Terkirim 2 Meter Terkirim Terkirim Terkirim Terkirim Terkirim 3 Meter Terkirim Terkirim Terkirim Terkirim Terkirim 4 Meter Terkirim Terkirim Terkirim Terkirim Terkirim 5 Meter Terkirim Terkirim Terkirim Terkirim Terkirim 6 Meter Terkirim Terkirim Terkirim Terkirim Terkirim 7 Meter Terkirim Terkirim Terkirim Terkirim Terkirim 8 Meter Terkirim Terkirim Terkirim Terkirim Terkirim
9 Meter Tidak
10 Meter Terkirim Terkirim Tidak Terkirim
Tidak
Terkirim Terkirim
Error 2.5%
Sedangkan pengujian jarak dengan halangan dilakukan sebanyak 5 kali tahap pengujian dengan jarak maksimum sejauh 10 meter, terdapat perintah yang dikirimkan smartphone tidak diterima perangkat sebanyak 5 kali gagal diterima atau sebanyak 2.5%.
KESIMPULAN
Dari hasil pengujian yang dilakukan dapat disimpulkan beberapa hal sebagai berikut:
1. Unjuk kerja jarak transmisi maksimum adalah kurang dari 10 meter tanpa Halangandan kurang dari 9 meter transmisi dengan Halangan.
2. Untuk navigasi dengan jarak 8 meter mobil robot sangat baik dalam melakukan manuver perintah yang diberikan oleh aplikasi Bluetooth RC.
3. Navigasi menggunakan acceleometer sering menyebabkan ketidak akurasian dalam mengendalikan mobil robot sehingga kerap sekali aplikasi tersebut mengirimkan perintah layaknya bersamaan dikarenakan keterlambatan dalam mengeksekusi perintah dari aplikasi tersebut.
DAFTAR PUSTAKA
Wallace Jackson, 2013, Learn Android Application Development, Apress,New York City.
Artanto Dian. 2012.”Interaksi Arduino dan LabView”. Jakarta: Elex Media Komputindo
Ary Heryanto, dan Adi P., Wisnu, 2008 “Pemrograman Bahasa C untuk Mikrokontroller ATMega8535”. Yogyakarta: Andi.
Budiharto, Widodo, Belajar Sendiri: Membuat Robot Cerdas, Elex Media Komputindo, Jakarta 2006.
Chandra, Franky dan Deni Arifianto, Cetakan Kedua, 2011, Jago Elektronika Rangkaian Sistem Otomatis, PT Kawan Pustaka, Jakarta Selatan