TUGAS AKHIR
Diajukan Untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Oleh: Nama : Deri NIM : 025114076
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
2007
FINAL PROJECT
Presented as Partial Fulfillment of the Requirements To Obtain the Sarjana Teknik Degree
In Electrical Engineering Study Program
By: Name : Deri
Student ID Number : 025114076
ELECTRICAL ENGINEERING STUDY PROGRAM
DEPARTMENT OF ELECTRICAL ENGINEERING
FACULTY OF SCIENCE AND TECHNOLOGY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
2007
“Saya menyatakan dengan sesungguhnya bahwa tugas akhir yang saya tulis ini
tidak memuat karya atau bagian karya orang lain,
kecuali yang telah disebutkan dalam kutipan dan daftar pustaka,
sebagaimana layaknya karya ilmiah.”
Yogyakarta, 18 Oktober 2007
Deri
Kupersembahkan karya tulis ini kepada :
” Tuhan Yesus Kristus terkasih,
Bapak dan Ibu Tercinta,
saudaraku Malvi Primanani tercinta,
Keluarga besarku tercinta,
Kekasihku tersayang,
Teman-temanku elektro 2002,
Almamaterku Teknik Elektro USD ”
Sa a t la ngk a h t e ra sa be ra t da n w a k t u
se a k a n be rhe nt i,
inga t la h sa t u ha l…
M a la m t a k a k a n se la lu m a la m ,
k a re na m e nt a ri a k a n se la lu a da di ujung
ge la p
‘t uk sina ri se t ia p la ngk a h
INTISARI
Tugas akhir ini mendeskripsikan tentang Pengendali Ketinggian Air dengan Kendali Mode Proporsional yang menggunakan pompa air untuk memperoleh ketinggian air yang stabil.
Pengendali Ketinggian Air dengan Kendali Mode Proporsional diimplementasikan dengan menggunakan metode Ziegler-Nichols. Masukan dari pengendali Proporsional adalah selisih tegangan antara set point dengan feedback
(sensor). Dari hasil selisih itu kemudian digunakan untuk mengendalikan pompa air. Pada implementasi, terdapat 3 nilai level tegangan (set point) dengan besar tegangan yang berbeda-beda yaitu tegangan 3,8 Volt menyatakan kondisi ketinggian air 4 Cm, tegangan 4,9 Volt menyatakan ketinggian air 8 Cm, dan tegangan 5,5 Volt menyatakan kondisi ketinggian air 12 Cm. Pemilihan set point dilakukan dengan menekan tombol pemilih.
Pengendali Ketinggian Air Dengan Kendali Mode Proporsional telah diimplementasikan dan dilakukan pengujian. Hasil yang diperoleh dalam pengujian adalah ketinggian air sesuai dengan yang diinginkan pada set point.
Kata kunci : Suhu Air, Kendali Proporsional, Ziegler-Nichols.
ABSTRACT
This final project describes about Water Level Controller Using Proportional Mode using a water pump to get the temperature constant. Water Level Controller Using Proportional Mode is applied using Ziegler-Nichols method. Input from Proportional controller is voltage difference between setting point and feedback (sensor). The differences are used to control water pump. In this applied, there are 3 set points with voltage difference which are 3,8 V to representation the condition of height water level 4 Cm, 4,9 V to representation the condition of height water level 8 Cm, and 5,5 V to representation the condition of height water level 12 Cm. The selection of voltage level is done by pressing the selection button.
Water pump Controller Using Proportional Mode is successfully applied after finishing some operation tests due to the preparation of final arrangement. The Result of operation tests is water level condition according to setting point.
Key words: Water Level, Proprotional method, Ziegler-Nichols.
Puji syukur penulis panjatkan kepada Tuhan yang Maha Esa, karena atas
Anugerah-Nya penulis akhirnya dapat menyelesaikan tugas akhir ini dengan baik dan
lancar.
Dalam proses penulisan tugas akhir ini penulis menyadari bahwa ada begitu
banyak pihak yang telah memberikan perhatian dan bantuan dengan caranya
masing-masing sehingga tugas akhir ini dapat terselesaikan. Oleh karena itu penulis ingin
mengucapkan terima kasih antara lain kepada :
1. Tuhan Yesus atas penyertaan dan bimbingannya.
2. Bapak Ir. Greg. Heliarko, S.J., S.S., B.S.T., M.A., M.Sc. selaku Dekan Fakultas
Teknik.
3. Bapak Augustinus Bayu Primawan, S.T., M.Eng. selaku Ketua Jurusan Teknik
Elektro.
4. Ibu B. Wuri Harini, S.T., M.T. selaku pembimbing I atas ide-ide yang berguna,
bimbingan, dukungan, saran dan kesabaran bagi penulis dari awal sampai tugas
akhir ini bisa selesai.
5. Martanto, S.T., M.T. selaku pembimbing II yang telah bersedia meluangkan
waktu serta memberikan bimbingan dan saran yang tentunya sangat berguna
untuk tugas akhir ini.
6. Seluruh dosen teknik elektro atas ilmu yang telah diberikan selama penulis
menimba ilmu di Universitas Sanata Dharma Yogyakarta.
7. Bapak dan Ibu tercinta atas semangat, doa serta dukungan secara moril maupun
materiil.
Plenthonx, Memet, Lambe’z, Roby, Broto, Wawan, Hari, P-K, Lele, Dhika,
Sinung, Oscar, Ido, Kobo, Ari W, Denny, Koten, Ahok, Iyok, Erick, Andi S,
Alex, Pandu, Heri S dan teman-teman seperjuangan lain yang tidak dapat saya
sebutkan satu persatu di sini. Saya ucapkan banyak terima kasih atas
dukungannya.
11.Teman-teman Operator warnet Blackberry Underground : KJ, M’ Moko, Dany,
Edo, Andre, Nico, Dipha, Deras, Rico, Budy, Lian, Phia, Elin, Yoan dan
teman-teman lain yang tidak dapat saya sebutkan satu persatu di sini. Saya ucapkan
banyak terima kasih atas dukungannya.
12.Dan seluruh pihak yang telah ambil bagian dalam proses penulisan tugas akhir ini
yang terlalu banyak jika disebutkan satu-persatu.
Dengan rendah hati penulis menyadari bahwa tugas akhir ini masih kurang dari
sempurna, oleh karena itu berbagai kritik dan saran untuk perbaikan tugas akhir ini
sangat diharapkan. Akhir kata, semoga tugas akhir ini dapat bermanfaat bagi semua
pihak. Terima kasih.
Yogyakarta, 18 Oktober 2007
Penulis
HALAMAN JUDUL ... i
HALAMAN PERSETUJUAN PEMBIMBING ... iii
HALAMAN PENGESAHAN... iv
HALAMAN PERNYATAAN KEASLIAN KARYA ... v
HALAMAN PERSEMBAHAN ... vi
HALAMAN MOTTO ... vii
INTISARI ... viii
ABSTRACT ... ix
KATA PENGANTAR... x
DAFTAR ISI... xii
DAFTAR GAMBAR ... xvi
DAFTAR TABEL ... xix
BAB I. PENDAHULUAN
1.1 Judul……… 11.2 Latar Belakang ... 1
1.3 Tujuan dan manfaat penelitian ... 2
1.4 Perumusan Masalah ... 2
1.5 Batasan Masalah ... 3
1.6 Metodologi Penelitian ... 3
2.1.1 Gerbang Logika AND ... 5
2.1.2 Konfigurasi Sistem Kendali ... 7
2.1.3 Variabel Sistem Kendali ... 9
2.2 Sensor dan Transduser ... 10
2.3 Deteksi Kesalahan... 11
2.4 Aktuator ... 12
2.5 Penggerak ( Driver ) Motor ... 13
2.6 Pembangkit Pulsa ... 14
2.7 Solid-State Relay (Optoisolator)... 15
2.8 Metode Ziegler-Nichols pada Perancangan Kontroler PID ... 17
2.8.1 Metode Kurva Reaksi... 17
2.8.2 Kendali Proporsional... 19
2.9 Op-amp ... 22
2.10 Tanggapan Sistem... 28
BAB III PERANCANGAN
3.1 Sistem Pengendalian Ketinggian Air... 293.1.1 Pelampung ... 29
3.1.2 Pengisi Bak Air(Pompa air) dan Pengurang Bak Air(Kran)… 30
3.2 Sensor Ketinggian Air dan Set point... 31
3.3 Deteksi Kesalahan ... 33
BAB IV. HASIL PENGAMATAN DAN PEMBAHASAN
4.1 Pengamatan Plant danKinerja Plant... 39
4.2 Pengamatan sensor ... 41
4.2.1 Pengamatan Sensor pada Set Point Pertama (4 Cm)... 41
4.2.2 Pengamatan Sensor pada Set point Kedua (8 cm) ... 47
4.2.3 Pengamatan Sensor pada Set point Ketiga (12 cm)... 55
4.3 Pengamatan Kendali Proporsional ... 66
4.3.1 Kendali Proporsional pada set point pertama... 66
4.3.2 Kendali Proporsional pada set point kedua ... 67
4.3.3 Kendali Proporsional pada set point ketiga... 68
4.4 Pengamatan Unjuk Kerja Sistem ... 69
4.4.1 Unjuk Kerja Sistem Pada Set point Pertama ... 69
4.4.2 Unjuk Kerja Sistem Pada Set point kedua... 69
4.4.3 Unjuk Kerja Sistem Pada Set point ketiga ... 70
BAB V. Kesimpulan dan Saran
5.1 Kesimpulan ... 745.2 Saran ... 74
I.1 Judul
Pengendali ketinggian air berbasis Pengendali Proporsional
I.2 Latar Belakang
Dengan berkembangnya ilmu dan teknologi mengakibatkan
perkembangan teknologi elektronika juga berkembang. Kemajuan
perkembangan teknologi elektronika menyebabkan persaingan dalam
dunia industri semakin meningkat. Efisiensi produksi umumnya dianggap
sebagai kunci sukses. Efisiensi produksi meliputi area yang luas, antara
lain :
a. Mengurangi kontrol manual yang dilakukan oleh manusia.
b. Mempertinggi laju produksi.
c. Menurunkan biaya produksi.
Pengendali otomatis ini merupakan salah satu cara meningkatkan
efisiensi produksi suatu industri. Dalam penelitian ini peneliti mempelajari
dan mempraktekkan aplikasi suatu sistem pengendali otomatis. Pengendali
otomatis dalam suatu proses pengendalian ketinggian air salah satunya
adalah dengan sistem kendali proporsional. Pengendalian ketinggian air
dalam suatu bak air ini meliputi beberapa komponen penting, yaitu: pompa
air, bak air, sensor ketinggian air, dan kran pembuangan. Pengendalian
ketinggian air dengan kendali proporsional ini merupakan pengendali
dengan kalang tertutup.
I.3 Tujuan dan manfaat penelitian
Tujuan dari penelitian ini adalah membuat suatu sistem pengendali
ketinggian air menggunakan sistem kendali proporsional dengan nilai
error yang tidak terlalu besar dan dapat menentukan nilai konstanta proporsionalnya.
Adapun manfaat dari penelitian ini adalah sebagai berikut:
a. Penulis dapat membuat rangkaian pengendali dengan pengendali
proporsional.
b. Sebagai alat bantu pengendali pada pabrik-pabrik kimia.
c. Sebagai alat bantu dalam pengaturan debit air pada bendungan.
d. Mempermudah pengendalian ketinggian air.
e. Sebagai alat bantu pengendalian otomatis dalam dunia industri,
khususnya yang membutuhkan pengendalian ketinggian air.
I.4 Perumusan Masalah
Dengan melihat tujuan dan latar belakang yang ada, maka
permasalahan yang dapat dirumuskan pada pembuatan alat ini adalah
a. Apakah pengendali ketinggian air yang dibuat dengan sistem
pengendali proporsional ini akan memiliki tingkat ketelitian yang
tinggi?
b. Apakah sistem yang dirancang dapat bekerja dengan baik?
c. Apakah pengendali proporsional yang dirancang dapat mencapai
kestabilan?
I.5 Batasan Masalah
Agar permasalahan yang ada tidak berkembang menjadi luas, maka
perlu adanya batasan terhadap permasalahan yang akan dibuat yaitu:
a. Pengendali ketinggian air dengan kendali proporsional ini ditentukan
dengan set point tertentu.
b. Terdapat tiga set point yang digunakan pada pengendali ketinggian air dengan kendali proporsional ini.
c. Bak air yang digunakan adalah dua buah bak aquarium (satu bak
digunakan sebagai sumber) dengan panjang 30 cm, lebar 15 cm, dan
tinggi 15 cm.
d. Jarak antara batas atas dan batas bawah kurang lebih sekitar 10 cm.
1.6 Metodologi Penelitian
Metodologi yang digunakan untuk menyelesaikan permasalahan
a. Mengumpulkan data dan informasi dari internet maupun perpustakaan
yang berhubungan dengan alat, yang diharapkan dapat membantu
dalam proses selanjutnya.
b. Merancang plant. Membuat perencanaan miniatur dari alat yang akan dibuat. Dalam perancangan plant ini gambar dibuat dengan komputer kemudian dibuat secara nyata.
c. Mengambil data plant. Pengambilan data pada plant ini berhubungan dengan set point sensor yang akan digunakan dalam perancangan, sehingga set point yang dirancang sesuai dengan yang diinginkan. d. Merancang kendali. Dalam perancangan kendali berhubungan dengan
pembuatan pengendali proporsional yang akan digunakan sebagai
pengendali sistemnya.
e. Implementasi.
f. Pengujian.
g. Penulisan laporan.
1.7 Sistematika Penulisan
Sistematika penulisan laporan tugas akhir ini adalah sebagai berikut :
BAB I Pendahuluan
Bab ini berisi tentang latar belakang masalah, tujuan dan
manfaat dari penelitian, perumusan masalah, batasan
BAB II Dasar Teori
Bab ini berisi tentang dasar teori yang digunakan untuk
membuat Pengendali suhu air yang disertai dengan
penjelasan.
BAB III Rancangan Penelitian
Bab ini berisi tentang rancangan peralatan yang dibuat,
pemilihan komponen, serta penjelasan singkat tentang cara
kerja peralatan.
BAB IV Hasil dan Pembahasan
Bab ini berisi tentang pembahasan dan analisis mengenai
hasil penelitian yang telah dilaksanakan.
BAB V Kesimpulan dan Saran
Bab ini berisi tentang kesimpulan dan spesifikasi peralatan
yang dibuat serta saran-saran untuk perbaikan alat dan
2.1. Sistem Kendali
2.1.1. Tinjauan Umum Sistem Pengendalian
Sistem kendali adalah proses pengaturan atau pengendalian terhadap
satu atau beberapa besaran pada suatu rangkuman atau jangkauan nilai
tertentu, dalam istilah lain disebut juga teknik pengaturan. Sistem
pengendalian ditinjau dari segi peralatan, sistem kendali terdiri dari
berbagai susunan komponen fisis yang digunakan untuk mengarahkan
aliran energi ke suatu mesin atau proses agar dapat menghasilkan sesuatu,
dalam hal ini menghasilkan tinggi permukaan air tertentu pada bak air [1].
Secara umum sistem kendali dapat dikelompokkan sebagai berikut :
1. Pengendali manual dan otomatis.
Pengendalian secara manual adalah pengendalian yang dilakukan
oleh manusia yang bertindak sebagai operator, sedangkan
pengendalian secara otomatis adalah pengendalian yang dilakukan oleh
mesin-mesin atau peralatan yang bekerja secara otomasis dan
pengoperasiannya di bawah pengawasan manusia.
Dalam perancangan pengendali tinggi permukaan air ini
peralatan-peralatan yang digunakan adalah peralatan elektronis dan
peralatan mekanis. Berdasarkan hal tersebut, karakteristik penting
dari sistem kontrol automatik menurut Katsuhiko Ogata[1] adalah
sebagai berikut :
a. Sistem kendali otomatik merupakan sistem dinamis yang dapat
berbentuk linear atau nonlinear.
b. Bersifat menerima masukan, memprosesnya, mengolahnya, dan
kemudian mengembangkannya.
c. Komponen atau unit yang membentuk sistem pengendalian tinggi
permukaan air ini akan saling mempengaruhi.
d. Bersifat mengembalikan sinyal ke bagian masukan atau umpan balik
dan sinyal umpan balik ini digunakan untuk memperbaiki sistem.
2. Pengendali kalang tertutup dan kalang terbuka.
Dalam sistem pengendali kalang tertutup besaran keluaran sistem
pengendalian memberikan efek terhadap masukan sebagai besaran
yang dikendalikan sehingga dapat dibandingkannya terhadap nilai
yang dicatat melalui alat pencatat. Perbedaan nilai yang terjadi antara
besaran yang dikendalikan dan ditampilkan dengan alat pencatat
digunakan sebagai koreksi yang pada gilirannya akan merupakan
besaran pengendalian. Jadi dengan kata lain, sistem kendali edaran
tertutup adalah sistem kendali berumpan balik.
Sinyal kesalahan penggerak merupakan selisih antara sinyal
masukan dengan sinyal umpan balik adalah suatu fungsi sinyal
keluaran yang diumpankan ke pengendali untuk memperkecil
ditentukan. Dengan kata lain, istilah kalang tertutup berarti
menggunakan aksi umpan balik untuk memperkecil kesalahan sistem.
Jika sistem kendali digunakan untuk menggantikan operator manusia
maka sistem kendali tersebut menjadi otomatik.
Dimisalkan sistem tersebut digunakan untuk mengendalikan tinggi
permukaan air dalam bak air. Set point digunakan untuk memberikan sinyal masukan referensi tinggi permukaan air. Tinggi permukaan air
dalam bak air diukur dengan alat ukur tinggi permukaan air berupa
sensor ketinggian permukaan air. Kedua input tersebut dibandingkan
dengan sebuah pembanding, hasil perbandingan sinyal dari set point
dengan sinyal dari sensor ketinggian permukaan air tersebut
digunakan untuk menggerakkan proses pengendalian ketinggian
permukaan air.
Dalam sistem pengendali kalang terbuka besaran keluaran sistem
pengendalian tidak memberikan efek terhadap masukan sebagai
besaran yang dikendalikan. Jadi sistem pengendalian kalang terbuka
adalah sistem kendali yang tidak berumpan balik.
2.1.2. Konfigurasi SistemKendali
Dalam gambar 2.1. ditunjukkan gambar diagram kotak secara umum
Pengndali G1
Proses G2
Jalur Umpan Balik
H Keluaran (OUT) Masukan (IN)
-+
Gambar 2.1. Elemen-elemen kendali kalang tertutup.
Besarnya perbandingan antara masukan (IN) dengan keluaran (OUT)
dalam gambar (2.1) seperti pada persamaan (1) di bawah ini.
( 2.1 )
= IN OUT H) G (G G G × × + × 2 1 1 2 1
Secara umum, elemen dari sebuah kontrol rangkaian tetutup terdiri
dari[1] :
1. Masukan IN.
Elemen ini berfungsi untuk mengubah besaran yang dikontrol
menjadi sinyal masukan bagi sistem kontrol.
2. Pengendali G1.
Berfungsi untuk memproses sinyal kesalahan yang terjadi dan
setelah sinyal kesalahan tersebut dimasukkan melalui elemen
pengendalian, akan dihasilkan sinyal yang berfungsi sebagai
pengendali proses.
3. Proses G2.
Elemen ini dapat berupa proses mekanis, elektris, hidraulis,
permukaan air ini hanya menggunakan proses mekanis dan elektris.
4. Jalur Umpan Balik H.
Bagian sistem yang mengukur keluaran yang dikontrol dan
kemudian mengubahnya menjadi sinyal umpan balik.
2.1.3. Variabel Sistem Kendali
Berdasarkan jumlah elemen yang menyusun suatu sistem kendali,
terdapat beberapa variabel pengendalianyaitu :
1. Set point adalah nilai acuan yang ditentukan secara variabel dan dikendalikan selama pengendalian.
2. Masukan acuan adalah sinyal aktual yang masuk ke sistem
pengendalian.
3. Keluaran yang dikendalikan merupakan nilai yang akan di
pertahankan bagi variabel yang dikendalikan, dan merupakan nilai
yang ditampilkan oleh alat pencatat.
4. Variabel yang dimanipulasi adalah sinyal dari elemen pengendalian
dan berfungsi sebagai sinyal pengendalian tanpa adanya gangguan.
5. Sinyal umpan balik adalah sinyal yang merupakan fungsi dari
keluaran yang dicatat oleh alat pencatat.
6. Sinyal kesalahan adalah selisih antara sinyal acuan dari set point
dengan sinyal sensor ketinggian permukaan air.
7. Sinyal gangguan adalah sinyal-sinyal tambahan yang tidak
2.2. Sensor dan Transduser
Sensor digunakan sebagai elemen yang langsung mengadakan kontak
dengan yang diukur. Transduser berfungsi untuk mengubah besaran fisis
yang diukur menjadi besaran fisis lainnya. Pada umumnya adalah
mengubah besaran-besaran fisis tersebut menjadi besaran listrik.
Salah satu komponen elektronika yang dapat digunakan sebagai
transduser posisi hambatan adalah potensiometer. Potensiometer adalah
suatu hambatan yang dapat diubah nilai resistansinya dengan cara mekanik
(memutar/menggeser). Potensiometer terdiri atas sebuah jalur atau track
yang mempunyai resistansi menyeluruh yang konstan dengan sebuah
penyapu (wiper) yang dapat bergerak sambil tetap bersentuhan dengan jalur atau track.
Dalam gambar 2.2 (a) ditunjukkan gambar simbol potensiometer pada
rangkaian elektronika dan dalam gambar 2.2 (b) ditunjukkan gambar
perbandingan antara hambatan RA dan RB pada potensiometer.
Gambar 2.2. (a) Simbol potensiometer, (b) Perbandingan hambatan RA dan RB pada potensiometer
Besarnya tegangan keluaran Vout pada potensiometer ditentukan oleh perbandingan RA dan RB seperti pada persamaan (2.2) sesuai dengan
gambar 2.2 (b).
(2. 2 )
Vout = Vin x
RB RA
RA
+
2.3. Deteksi Kesalahan.
Deteksi kesalahan berfungsi untuk mengukur kesalahan yang terjadi
antara keluaran aktual dengan keluaran yang diinginkan. Deteksi
kesalahan merupakan selisih antara tegangan keluaran dari set point
dengan tegangan dari sensor ketinggian permukaan air.
Deteksi kesalahan yang digunakan dalam penelitian ini adalah penguat
beda tegangan. Dalam gambar 2.3 ditunjukkan gambar rangkaian penguat
beda tegangan
V2
Rf
R3
R2
R1
VI
Vout
+ -U1A 3 2 1Gambar 2.3. Rangkaian penguat beda tegangan
Dari gambar 2.3 besarnya keluaran Vout adalah :
Vout = 1 2 R V Rf × + × + 3 2 3 R R R 1 1 1 V R Rf R × +
( 2.3 )
Untuk R1 = R2 = R3 = Rf
Untuk =
Rf R1
3 2
R R
Maka Vout = ( 2 1)
1 V V
R Rf
−
× ( 2.5 )
2.4. Aktuator.
Aktuator digunakan untuk mengendalikan aliran energi ke sistem yang
dikendalikan. Alat ini disebut juga dengan elemen pengendali akhir.
Elemen keluaran ini harus mempunyai kemampuan untuk menggerakkan
beban ke suatu nilai yang ditentukan.
Pompa air aquarium adalah salah satu jenis Aktuator. Pompa air yang
digunakan dalam penelitian mempunyai daya 20 W dengan frekuensi
50 Hz, sedangkan tegangan yang dibutuhkan untuk mencatu sebesar 220
Volt. Debit air pada pompa ini dapat diatur keluarannya, sehingga proses
pengisian air bisa cepat atau lambat. Pompa air aquarium dalam penelitian
ini digunakan untuk memompa atau mengisi air.
2.5. Penggerak ( Driver ) Motor
Untuk mengendalikan motor AC menggunakan tegangan DC dapat
digunakan komponen elektronika dengan nama triac. Triac atau AC
switch, merupakan saklar arus bolak–balik bentuk trioda (mempunyai 3 elektroda). Pada dasarnya triac terdiri dari dua SCR (Silicon Controlled Rectifier) yang terpasang paralel, dan dilengkapi dengan elektroda
Gambar 2.4. Bentuk fisik triac.
Keunggulan triac adalah dapat digunakan untuk mengatur daya dalam batas–batas lebih lebar, artinya dengan triac arus dapat mengalir ke arah bolak–balik dan triac dipakai untuk pengaturan daya gelombang penuh.
Triac mempunyai tiga terminal, dua terminal utama yakni MT1 dan MT2 serta satu gerbang G (gate). Terminal MT1 dan MT2 dirancang demikian sebab aliran arus adalah dua arah.
Jika terminal MT1 dan MT2 diberi tegangan AC dan gate dalam kondisi mengambang maka tidak ada arus yang dilewatkan oleh triac
sampai pada tegangan breakover triac tercapai. Pada kondisi ini triac OFF. Pada saat gate diberi arus positif atau negatif maka tegangan
breakover ini akan turun. Semakin besar nilai arus yang masuk ke gate
maka semakin rendah tegangan breakover-nya. Pada kondisi ini triac menjadi ON selama tegangan pada MT1 dan MT2 di atas nol volt. Apabila tegangan pada MT1 dan MT2 sudah mencapai nol volt maka
kondisi kerja triac akan berubah dari ON ke OFF. Ketika triac sudah menjadi OFF kembali, triac akan selamanya OFF sampai ada arus trigger
Gambar 2.5. Kurva karakteristik triac.
2.6 Pembangkit Pulsa.
PWM merupakan rangkaian yang menghasilkan variasi pulsa untuk
masukan dc yang bervariasi. Dengan menggunakan PWM akan didapatkan
nilai duty cycle yang berubah-ubah tergantung masukan dc. Pada prinsipnya PWM tersebut membandingkan tegangan segitiga yang
berperiode konstan tertentu dengan tegangan dc yang berubah-ubah. Hasil
yang didapatkan berupa gelombang kotak dengan perbandingan periode
on-off yang berubah. Untuk lebih jelasnya perhatikan gambar 2.6. Misal
suatu gelombang segitiga dibandingkan dengan tegangan sebesar Vdc
yang berpolaritas positif, maka akan didapatkan gelombang kotak.
2.7 Solid-State Relay.
Pada relai yang berjenis relai solid state(solid-state relay = SSR) ini tidak mempunyai kumparan dan kontak sesungguhnya dibandingkan
dengan relai elektromekanis(Electromechanics relay = EMR). Sebagai pengganti digunakan alat penghubungan semikonduktor seperti transistor
bipolar, MOSFET, SCR, atau triac. Solid-state Relay tidak mempunyai bagian yang berputar, relai tersebut tahan terhadap goncangan dan getaran
serta ditutup rapat terhadap kotoran dan kelembaban. SSR merupakan
aplikasi pada pengisolasian rangkaian kontrol tegangan-rendah dari
rangkaian beban-daya-tinggi. Dioda yang memancarkan cahaya(LED)
yang digabungkan pada rangkaian input menyala mengeluarkan cahaya
apabila kondisi pada rangkaian benar-benar untuk mengaktifkan relai.
Cahaya LED pada fototransistor, yang kemudian menghantar,
menyebabkan arus trigger diberikan pada triac.
Solid-state Relay dapat digunakan untuk mengontrol beban ac atau dc. Jika relai dirancang untuk mengontrol beban ac, digunakan triac untuk menghubungkan beban Iin. Tegangan kontrol untuk SSR dapat arus searah
dan bolak-balik, dan biasanya berkisar antara 3 sampai 32 V untuk DC dan
80 dan 280 V untuk AC. Arus beban maksimum mencapai 50 A adalah
mungkin pada ukuran kerja tegangan Iin 120, 240, dan 480 Vac. Pada
sebagian besar aplikasi, SSR digunakan sebagai perantara antara rangkaian
kontrol tegangan rendah dengan tegangan Iin ac yang lebih tinggi. Untuk
SSR mempunyai beberapa keuntungan dibandingkan dengan
EMR. SSR lebih terpercaya dan mempunyai umur pemakaian yang lebih
panjang. karena SSR tidak mempunyai bagian yang berputar, Dapat juga
digabungkan dengan rangkaian transistor dan sirkuit IC. SSR tidak banyak
menimbulkan interferensi elektromagnetis. SSR lebih tahan terhadap
goncangan dan terhadap getaran, mempunyai waktu respon yang lebih
cepat[2].
IN MG1
MOTOR AC
1
2
MOC
1
2
6
4
TRIAC R11
220 v olt
1
2
R12
Gambar 2.7. SSR yang dirangkai secara optis.
2.8. Metode Ziegler-Nichols pada Perancangan Kontroler PID
Penalaan parameter kontroler PID (Proportional Integral Differential) selalu didasari atas tinjauan terhadap karakteristik yang diatur (Plant). Dengan demikian betapapun rumitnya suatu plant, perilaku plant tersebut harus diketahui terlebih dahulu sebelum penalaan parameter PID itu
reaksi plant yang dikenai suatu perubahan. Dengan menggunakan metode itu model matematik perilaku plant tidak diperlukan lagi, karena dengan
menggunakan data yang berupa kurva keluaran, penalaan parameter PID
telah dapat dilakukan[3]
2.8.1. Metode Kurva Reaksi
Metode ini berdasarkan terhadap reaksi sistem untaian terbuka. Plant
sebagai untaian terbuka dikenai sinyal fungsi tangga satuan (gambar 2.8).
Kalau plant minimal tidak mengandung unsur integrator atau pole-pole
kompleks, reaksi sistem akan berbentuk S. Dalam gambar 2.9
menunjukkan kurva berbentuk S tersebut. Kelemahan metode ini terletak
pada ketidakmampuannya untuk plant integrator maupun plant yang
mempunyai pole komplek.
Gambar 2.9. Kurva Respons berbentuk S.
Kurva berbentuk S mempunyai dua konstanta, waktu mati (dead time) L dan waktu tunda T. Dari gambar 2.9 terlihat bahwa kurva reaksi berubah
naik, setelah time constant L. Sedangkan time constant menggambarkan perubahan kurva setelah mencapai 63,2% dari keadaan mantapnya. Pada
kurva dibuat suatu garis yang bersinggungan dengan garis kurva. Garis
singgung itu akan memotong dengan sumbu absis dan garis maksimum.
Perpotongan garis singgung dengan sumbu absis merupakan ukuran waktu
mati, dan perpotongan dengan garis maksimum merupakan time constant
Tabel 1
Penalaan paramater PID dengan metode kurva reaksi
Tipe Kontroler Kp Ti Td
P
K
1
.T/L ~ 0
PI
K
9 , 0
.T/L L/0.3 0
PID
K
2 , 1
.T/L 2L 0,5L
Penalaan parameter PID didasarkan perolehan kedua konstanta itu.
Zeigler dan Nichols melakukan eksperimen dan menyarankan parameter
penyetelan nilai Kp, Ti, dan Td dengan didasarkan pada kedua parameter
tersebut. Tabel 1 merupakan rumusan penalaan parameter PID berdasarkan
cara kurva reaksi.
2.8.2 Kendali Proporsional
Kendali proporsional merupakan salah satu sistem kendali dari sekian
banyak sistem pengendali yang digunakan dalam pengendalian ketinggian
air dalam bak air. Kendali proporsional mempunyai keluaran yang
sebanding/proporsional dengan besarnya sinyal kesalahan (selisih antara
besaran yang diinginkan dengan harga aktualnya). Secara sederhana dapat
dikatakan, bahwa keluaran kontroler proporsional merupakan perkalian
masukan akan segera menyebabkan sistem secara langsung mengubah
keluarannya sebesar konstanta pengalinya [4].
Dalam gambar 2.10. ditunjukkan blok diagram yang menggambarkan
hubungan antara besaran setting, besaran aktual dengan keluaran kontroler proporsional. Sinyal kesalahan (error) merupakan selisih antara besaran
setting dengan besaran aktualnya. Selisih ini akan mempengaruhi kontroler, untuk mengeluarkan sinyal positip (mempercepat pencapaian
harga setting) atau negatif (memperlambat tercapainya harga yang diinginkan).
Kp
X
-+
E(s) M(s)
Sp
aktual
Gambar 2.10 Diagram blok kontroler proporsional.
Kontroler proporsional memiliki dua parameter, pita proporsional
(proportional band) dan konstanta proporsional. Daerah kerja kontroler efektif dicerminkan oleh pita proporsional, sedangkan konstanta
proporsional menunjukkan nilai faktor penguatan terhadap sinyal
kesalahan, Kp [5].
Hubungan antara pita proporsional (PB) dengan konstanta
proporsional (Kp) ditunjukkan secara prosentasi oleh persamaan berikut :
( 2.6 )
0 0
100 1
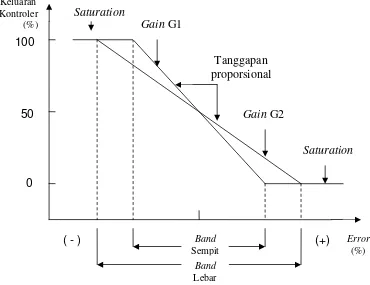
Gambar 2.11. Proportional band dari kontroler proporsional tergantung pada penguatan.
Gain G1
Tanggapan proporsional
Saturation Gain G2
0 50 100
Band
Sempit
Band
Lebar
(+)
( - ) Error
(%)
Saturation
Keluaran Kontroler (%)
Dalam gambar 2.11. ditunjukkan grafik hubungan antara PB, keluaran
kontroler dan kesalahan yang merupakan masukan kontroler. Ketika
konstanta proporsional bertambah semakin tinggi, pita proporsional
menunjukkan penurunan yang semakin kecil, sehingga lingkup kerja yang
dikuatkan akan semakin sempit
Ciri-ciri kontroler proporsional harus diperhatikan ketika kontroler
tersebut diterapkan pada suatu sistem. Secara eksperimen, pengguna
kontroler proporsional harus memperhatikan ketentuan-ketentuan berikut
1. Kalau nilai Kp kecil, kontroler proporsional hanya mampu melakukan
koreksi kesalahan yang kecil, sehingga akan menghasilkan respon
sistem yang lambat.
2. Kalau nilai Kp dinaikkan, respon sistem menunjukkan semakin cepat mencapai keadaan mantapnya. Namun jika nilai Kp diperbesar
sehingga mencapai harga yang berlebihan, akan mengakibatkan sistem
bekerja tidak stabil, atau respon sistem akan berisolasi.
Vout
Vin
R2
1 3
2
+
-3 2
1
R2
Gambar 2.12.Rangkaian kendali proporsional
Dari gambar (2.12) diperoleh persamaan sebagai berikut
) 1
2
( xVin
R R
Vout = − ( 2.7 )
1 2
R R Vin
Vout
Kp = = − ( 2.8 )
Dengan Vout = Tegangan keluaran
Vin = Tegangan masukan
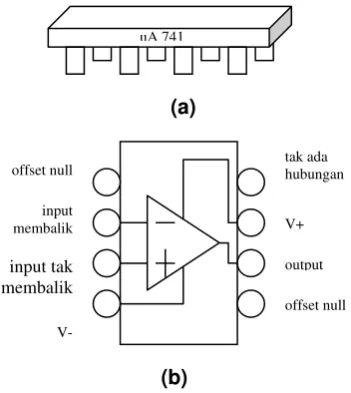
2.9. Op-amp
Op-amp yang sering digunakan adalah uA741C atau biasa disebut
jalur.Gambar 2.13a menunjukkan op-amp uA741. Alat ini sangat popular
karena bekerja dengan baik, mudah digunakan, murah dan mudah didapat.
Di dalam IC terdapat sepotong silikon yang memuat 20 transistor dan 11
resistor [ 6 ].
uA 741
(a)
offset null input membalik
input tak membalik
V-V+ tak ada hubungan
output offset null
(b)
Gambar 2.13 (a) Rangkaian terintegrasi mini-DIL (b)Fungsi dari setiap
hubungan pin uA741
Hubungan antar pin diperlihatkan pada gambar 2.13b. Bintik di pojok,
atau di ujung kemasan menunjukkan ujung penghitungan bilangan atau
nomor pin Sebagian besar kemasan elektronik, penghitungan pin
berlawanan dengan arah jarum jam, dilihat dari atas. Terminal offset null membetulkan dari luar ketidaksimetrisan kecil yang terjadi pada waktu membuat op-amp.
Dalam gambar 2.13 (a) dan 2.13 (b) diperlihatkan gambar secara
skematis op-amp 741, yang sangat populer. Rangkaian relatif langsung,
sehubungan dengan jenis rangkaian transistor. Op-amp ini mempunyai
tingkat transistor npn tunggal emitor yang memberikan penguatan yang
besar. Pengikut emitor npn mengemudikan tingkat output pengikut emitor push-pull, termasuk rangkaian pembatas arus.
Rangkaian ini khas sifatnya pada sebagian besar op-amp yang
tersedia. Dalam penerapannya sifat-sifat penguat ini mendeteksi
karakteristik kemampuan op-amp yang ideal. Dapat dilihat sejauh mana
sebenarnya op-amp telah menyimpang dari keadaan idealnya, konsekuensi
apa yang dialami pada saat mendesain rangkaian, dan apa yang dapat
dilakukan untuk mengatasinya.
Op-amp ideal mempunyai karakteristik sebagai berikut :
1. Impedansi input mode differential atau tunggal = tak terbatas. 2. Impedansi input edaran terbuka = 0.
3. Penguat tegangan tunggal mode = 0.
4. Vout = 0, apabila kedua input pada tegangan yang sama tegangan
offset sama dengan 0.
5. Output akan berubah secara seketika karena kecepatan putar tak terbatas.
Tinjauan terperinci atas penguat operasional adalah sebagai berikut :
1. Arus input
Terminal-terminal input menyerap atau arus bias bergantung pada
jenis op-amp. Sedikit arus yang disebut arus bias input Ib yang
besarnya sama dengan separuh jumlah arus input bila semua input
arus basis dari transistor input. Untuk op-amp 741 arus biasnya adalah 80 nA. Perlunya arus input adalah untuk menimbulkan beda tegangan pada resistor-resistor jaringan umpan balik, jaringan bias, atau
impedansi sumber. Nilai reristor akan membatasi ketergantungan
sepenuhnya terhadap penguatan rangkaian dc dan seberapa besarnya
variasi input yang dapat ditolerir.
Op-amp tersedia dengan arus bias input sampai dengan satu nanoampere atau kurang untuk tipe-tipe rangkaian input transistor atau sampai beberapa pikoampere untuk tipe-tipe rangkaian input FET. Pada umumnya, transistor op-amp diharapkan untuk bekerja pada
kecepatan tinggi yang arus biasnya lebih tinggi.
2 Arus offset input
Arus offset input adalah nama lain untuk selisih arus antara kedua arus input. Tidak seperti arus bias input, arus offset input merupakan akibat variasi pembuatan, karena rangkaian input simetris
menghasilkan arus bias yang identik pada kedua input. Artinya bahwa sekalipun op-amp dikemudikan oleh impedansi sumber yang identik,
op-amp akan melihat beda tegangan di antara input. Pada umumnya,
arus offset adalah sekitar sepersepuluh arus bias. Untuk op-amp 741 arus offset =10 mA.
3 Kisaran input tunggal mode
bekerja dangan semestinya. Apabila input keluar dari batas ini,
penguatan op-amp dapat berubah secara drastis, bahkan ada
tanda-tanda pembalikan. Untuk op-amp 741 yang bekerja pada catu + 15
volt, batas input tunggal mode adalah + 12 volt. 4. Impedansi input
Impedansi input menunjukkan resistansi input differential.
Impedansi yang terdapat pada satu input dengan input lain diketanahkan, yang biasanya jauh lebih kecil dari pada resistansi
tunggal mode. Untuk op-amp 741 besarnya sekitar 2 M ohm. Op-amp
input FET umumnya mempunyai Rin = 10000 mega ohm atau lebih. 5. Kisaran input diferensial
Beberapa op-amp hanya mengijinkan tegangan terbatas di antara
input, kadang-kadang sebesar + 0,5 volt, meskipun sebagian besar membolehkan inputdifferential mendekati tegangan catunya. Melebihi batas maksimal yang telah di tentukan dapat merusakkan op-amp
tersebut.
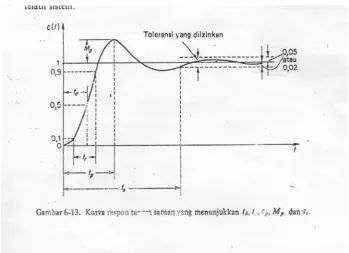
2.10 Tanggapan Sistem
Sebagian besar sistem kontrol adalah sistem kawasan waktu; yang
berarti, sistem ini harus menunjukkan respon waktu yang dapat diterima
[8]. Respon sistem kontrol sering menunjukkan osilasi teredam sebelum
system control terhadap masukan tangga satuan, biasanya dicari parameter-parameter berikut:
1. Waktu Tunda ( Delay Time ), td
Yaitu waktu yang diperlukan tanggapan mencapai setengah harga
akhir yang pertama kali.
2. Waktu Naik ( Rise Time ), tr
Yaitu waktu yang diperlukan tanggapan untuk naik dari 10% hingga
90% dari harga akhirnya.
3. Waktu Penetapan ( Settling Time ), ts
Yaitu waktu yang diperlukan kurva tanggapan dan menetap dalam
daerah disekitar harga akhir yang ukurannya ditentukan dengan
persentase mutlak dari harga akhir (biasanya 5% atau 2%).
4. Waktu Puncak (peak time), tp
Yaitu waktu yang diperlukan respon untuk mencapai puncak lewatan
pertamakali.
5. Lewatan maksimum (maximum overshoot), Mp
Yaitu harga puncak maksimum dari kurva respon yang diukur dari
satu. Jika harga keadaan tunak respon tidak sama dengan satu, maka
biasa digunakan persen lewatan maksimum.
Parameter ini didefinisikan sebagai
Persen lewatan maksimum = 100%
) (
) ( ) (
× ∞
∞ −
c c t
c p
(2.9)
Besarnya (persen) lewatan maksimum secara langsung menunjukkan
Untuk mengetahui karakteristik tanggapan system control terhadap masukan tangga satuan dapat ditunjukkan contoh pada gambar 2.14.
Proses pengendalian ketinggian air yang diteliti dibatasi pada proses
pengendalian ketinggian air pada suatu bak. Sistem kontrol dengan kendali
proporsional ini mengendalikan proses tersebut dengan kontrol secara analog yang
dibuat sehingga dapat bekerja secara otomatis. Untuk mengaplikasikan kendali
proporsional pada proses pengendali ketinggian air, peneliti akan membuat
miniatur pengendalian.
POMPA AIR
SENSOR
BAK 1
BAK 2
KRAN
KENDALI
PROPORSIONAL SET-POINT
Gambar 3.1.Sistem Pengendali Ketinggian Air dengan
Kendali Proporsional
Miniatur pengendali ketinggian air ini terdiri dari : pompa air yang digunakan
untuk mengisi air ke dalam bak, kran pembuangan yang dikontrol secara manual
dan bak air yang dilengkapi dengan sensor ketinggian air yang digunakan sebagai
pendeteksi ketinggian air dalam bak air (lihat gambar 3.1).
Berdasarkan gambar 3.1 maka dapat dibuat digram blok perancangan
seperti pada gambar 3.2 di bawah ini.
Set Point
Penguat Beda
Pengendali Proporsional
Driver Plant
Sensor
Gambar 3.2. Diagram blok perancangan.
Dalam Gambar 3.3 ditunjukkan gambar panel kontrol untuk mengatur
ketinggian air dalam perancangan pengendali ketinggian air dengan proporsional
4 Cm 8 Cm 12 Cm 0
1
0 1
0 1 Tinggi Air
Gambar 3.3 Panel kontrol ketinggian air.
3.1. Sistem Pengendalian Ketinggian Air. 3.1.1. Pelampung
Pelampung merupakan komponen dari sensor ketinggian air yang
berhubungan dengan sistem yang diukur. Pelampung merupakan
pendeteksi tinggi air yaitu digunakan untuk menggerakkan atau memutar
dikaitkan pada potensiometer dengan sebatang kawat dengan panjang
tertentu. Pelampung ini akan bergerak ke atas dan ke bawah sesuai dengan
tinggi air dalam bak air. Rancangan dari sistem pelampung sebagai
komponen sensor air sebagai berikut (Lihat Gambar 3.4) :
Pelampung
Potensiometer
Pengait
Gambar 3.4. Sistem deteksi ketinggian air dengan pelampung.
Dalam deteksi ketinggian air dengan pelampung, pelampung
dirancang atau dibuat dari sebuah bola tennis meja yang bisa mengapung
di atas air. Pelampung dirancang untuk mendeteksi ketinggian air dengan
jangkauan deteksi sedalam + 10 cm.
3.1.2. Pengisi Bak Air (Pompa air) dan Pengurang Bak Air (Kran)
Pompa air di dalam pengendali ketinggian air digunakan untuk
memompa atau mengisi air dari bak 1 ke dalam bak 2. Proses pengisian
air dalam bak dikendalikan dengan kendali proporsional. Pompa air yang
digunakan mempunyai daya 20 W dengan frekuensi 50 Hz, sedangkan
tegangan yang dibutuhkan untuk mencatu sebesar 220 Volt. Debit air pada
pompa ini dapat diatur keluarannya, sehingga proses pengisian air bisa
cepat atau lambat.
Kran digunakan untuk mengurangi air dalam bak 2. Kran yang
menutup dilakukan secara manual. Debit air yang mengalir dalam kran
dipengaruhi pada tinggi rendahnya air dalam bak 2. Semakin tinggi air
dalam bak 2 maka debit air yang mengalir dalam kran semakin besar atau
cepat.
3.2 Sensor Ketinggian Air dan Set point
Tabel 3.1 Data pengukuran
Ketinggian Tegangan keluaran
sensor (volt) Waktu (detik) No Air (Cm)
1 2 3,4 1
2 2,5 3,5 5
3 3 3,6 9
4 3,5 3,7 13
5 4 3,8 17
6 4,5 4 21
7 5 4,1 25
8 5,5 4,3 29
9 6 4,4 34
10 6,5 4,5 38
11 7 4,65 42
12 7,5 4,7 48
13 8 4,9 53
14 8,5 4,95 58
15 9 5 64
16 9,5 5,1 69
17 10 5,2 76
18 10,5 5,3 82
19 11 5,35 90
20 11,5 5,4 96
21 12 5,5 100
22 12,5 5,6 105
Dalam tabel 3.1 Ditunjukkan data pengukuran yang dilakukan untuk
Dalam perancangan sensor ketinggian air komponen yang digunakan
adalah potensiometer. Hambatan dan tegangan keluaran pada
potensiometer berubah sesuai dengan perubahan ketinggian air pada plant
yang dibuat
Untuk rangkaian sensor digunakan potensiometer R4 sebesar 10 kΩ
dan potensiometer R3 sebesar 10 kΩ digunakan sebagai pengkalibrasi.
Setelah dilakukan pengukuran didapatkan data seperti pada tabel 3.1 di
atas.
Untuk rangkaian set point digunakan potensiometer R2 sebesar 10 kΩ sebagai rangkaian pembagi tegangan dan potensiometer R1 sebesar 10 kΩ
sebagai pengkalibrasi, sehingga tegangan keluaran bisa diatur untuk
memilih set point yang diinginkan. Dalam perancangan ini digunakan tiga
set point yaitu : 1. Set point 1
a. Ketinggian air 4 cm
b. Tegangan keluaran set point (Vout) sebesar 3,8 Volt 2. Set point 2
a. Ketinggian air 8 cm
b. Tegangan keluaran set point (Vout) sebesar 4,9 Volt 3. Set point 3
a. Ketinggian air 12 cm
Gambar rangkaian set point dan sensor seperti pada gambar 3.5. Rangkaian set point (V1) dan sensor (V2) ini yang nantinya akan menjadi masukan bagi blok diagram berikutnya yaitu rangkaian pembanding.
12V
12V
R2 10k
1
3
2
R1 10k
1
3
2
R2 10k
1
3
2
R1 10k
1
3
2
Vb
V1
Va
V2
Gambar 3.5. Rangkaian set point dan sensor ketinggian air
3.3 Deteksi Kesalahan.
Untuk rangkaian deteksi kesalahan menggunakan rangkaian penguat
beda tegangan dengan menggunakan op-amp seperti pada gambar 2.3.
Dengan menggunakan persamaan 2.5 besarnya nilai R1, R2, R3, Rf dapat
dicari dengan cara seperti di bawah ini.
Ditentukan:
Vout = 0 V (karena besarnya tegangan yang digunakan untuk mematikan
motor pada plant sebesar 0V).
) 1 2 (
1 V V
R Rf
− ×
Vout =
R1 = 1kΩ,
R2 = 1kΩ,
R3 = 1kΩ
karena besarnya nilai resistor R1 = R2 = R3 = Rf.
Gambar rangkaian penguat beda lengkap dengan nilai resistor yang
dirancang seperti pada gambar 3.6 di bawah ini.
V2
1k
1k
1k
1k
VI
Vout
+
-U1A
3 2
1
Gambar 3.6 Rangkaian penguat beda
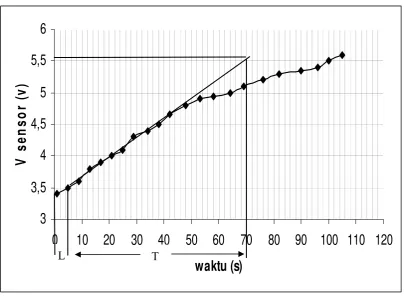
3.4 Pengendali (Kontroler)
Untuk rangkaian pengendali digunakan rangkaian pengendali
proporsional. Untuk merancang pengendali proporsional digunakan grafik
3
3,5
4
4,5
5
5,5
6
0
10
20
30
40
50
60
70
80
90 100 110 120
waktu (s)
V
s
e
ns
or
(
v
)
L T
Gambar 3.7. Grafik ketinggian air terhadap waktu.
Berdasarkan grafik gambar 3.7 dapat dihitung data penguatan atau Kp.
Rumus perhitungan data penguatan didapatkan berdasarkan tabel 1 (baris
1, kolom 1) Dari gambar 3.6 diperoleh nilai T = 70 dan L = 5. Karena
dalam perancangan plant menggunakan ketinggian maksimum, maka nilai K= 1. Jadi nilai Kp dapat dihitung, yaitu :
L T K Kp= 1 .
5 70
=
= 14
Maka berdasarkan persamaan 2.8 besarnya nilai R2 jika R1 ditentukan
R2 = Kp x R1
R2 = 14 x 1kΩ
= 14 kΩ
Gambar rangkaian pengendali proporsional lengkap dengan nilai
komponennya pada gambar 3.8
Vout
Vin
+
-3 2
1
1K
10K
1 3
2
1K
+
-3 2
1
1K
20k
1K
1K
Gambar 3.8 Rangkaian pengendali proporsional
3.5 Driver
Untuk rangkaian driver digunakan Solid-state Relay. Solid state relay
dapat digunakan untuk mengontrol beban ac atau dc. Jika relai dirancang
untuk mengontrol beban ac, digunakan triac untuk menghubungkan beban. Nilai-nilai komponen pada rangkaian driver disesuaikan berdasarkan
datasheet MOC 3021. Dalam perancangan rangkaian driver masukan (IN) berasal dari sebuah pembangkit pulsa. Gambar rangkaian pembangkit
Masukan (IN) berasal dari proporsional. Nilai tegangan puncak (Vpp) = 10
Volt dengan nilai frekuensi sebesar = 50Hz.
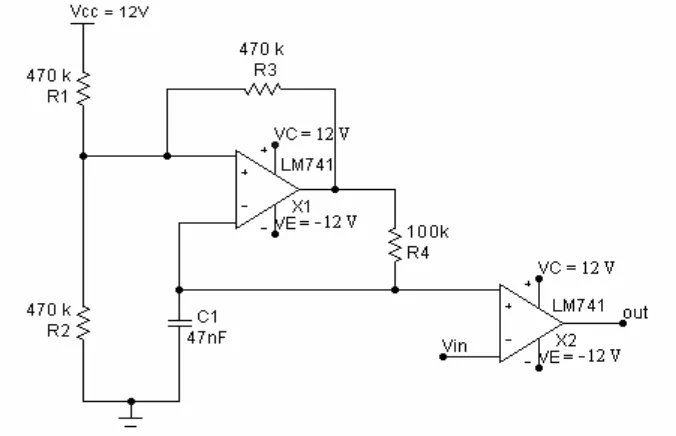
Dalam perancangan driver, digunakan PWM sebagai pemicu driver. Realisasi PWM terdiri dari pembangkit segitiga dan pembanding. Gambar
3.9 menunjukkan rangkaian pembangkit pulsa.
Gambar 3.9 Rangkaian Pembangkit Pulsa
Pada PWM ini nilai besaran ditentukan sebagai berikut :
Vcc = 12 Volt
Vee = -12 Volt
Frekuensi (f) = 60 Hz
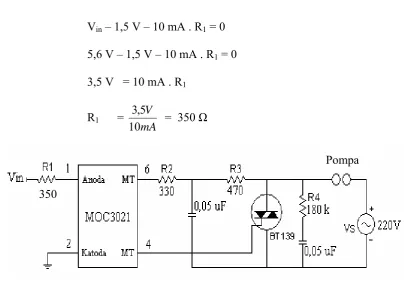
Gambar rangkaian driver untuk menggerakkan motor AC seperti pada
– 1,5 V – 10 mA . R = 0
Vin 1
5,6 V – 1,5 V – 10 mA . R = 0 1
3,5 V = 10 mA . R 1
mA V
10 5 , 3
R = 1 = 350 Ω
Pompa
350
Bab ini akan membahas hasil pengamatan atas implementasi rancangan
pengendali ketinggian air dengan kendali proporsional. Fungsi utama dari alat
yang dibuat adalah untuk mengurangi kontrol manual yang dilakukan oleh
manusia. Pengujian dan pengamatan dilakukan dengan cara memilih level
ketinggian air yang sudah ditentukan melalui set point. Pengambilan data dilakukan pada tegangan PLN sebesar 198 volt. Pengambilan data tegangan
dengan menggunakan multimeter digital, pengambilan data ketinggian air dengan
menggunakan penggaris, dan pengambilan data waktu dengan menggunakan
stopwatch.
4.1 Pengamatan Plant danKinerja Plant
Plant merupakan bagian sistem yang akan dikendalikan. Pada plant terdiri dari pompa air aquarium sebagai aktuator, 2 bak penampung air (satu bak
digunakan sebagai sumber dan bak satunya digunakan sebagai bak penampung),
dan menggunakan potensiometer sebagai sensor ketinggian air. Pada gambar 4.1a
ditunjukkan gambar plant dan 4.1b ditunjukkan perangkat keras untuk mengendalikan ketinggian air.
Ketinggian air diatur sesuai dengan nilai set point yang diinginkan. Pada sistem ini, jika keluaran sensor belum sama dengan set point, maka akan tetap ON. Pompa iar akan OFF, jika keluaran sensor sudah sama dengan set point yang
berarti error nol. Sistem tersebut dalam kondisi stabil sesuai dengan set point
yang diinginkan. Pompa air akan kembali ON secara otomatis jika keluaran sensor
kurang dari set point.
Gambar 4.1a Plant untuk perancangan pengendali ketinggian air
4.2 Pengamatan Delay Time, Rise Time, dan Settling Time
Sensor digunakan untuk mengukur ketinggian air. Nilai keluaran dari
sensor berupa tegangan, kenaikan tegangan tersebut merepresentasikan kenaikan
ketinggian air yang terlihat pada alat ukur ketinggian air. Pengamatan dilakukan
pada tegangan keluaran sensor, ketinggian air dan waktu. Dari data pengamatan
tersebut akan diperoleh grafik antara ketinggian air berbanding waktu
4.2.1 Pengamatan Delay Time, Rise Time, dan Settling Time pada Set Point
Pertama (4 Cm)
Tegangan pada set point pertama sebesar 3,8 Volt, yang menunjukkan ketinggian air 4 cm (tabel 3.1). Pengukuran dilakukan dari
kondisi ketinggian awal yaitu 2 cm dengan tegangan sensor sebesar 3,42
Volt.
a. Data pengamatan pada set point pertama saat kran pembuangan tertutup. Dalam tabel 4.1 ditunjukkan data pengamatan ketinggian air
terhadap waktu untuk set point pertama saat kran pembuangan tertutup. Tabel 4.1 Data pengamatan set point pertama (kran
pembuangan tertutup)
No Waktu (detik)
Ketinggian Air (Cm)
Tegangan keluaran sensor (volt)
1 0 2 3,42
2 3,66 2,5 3,51
3 6,2 3 3,57
4 9,87 3,5 3,7
5 13,29 4 3,81
6 17,35 4 3,91
7 21,22 4 3,91
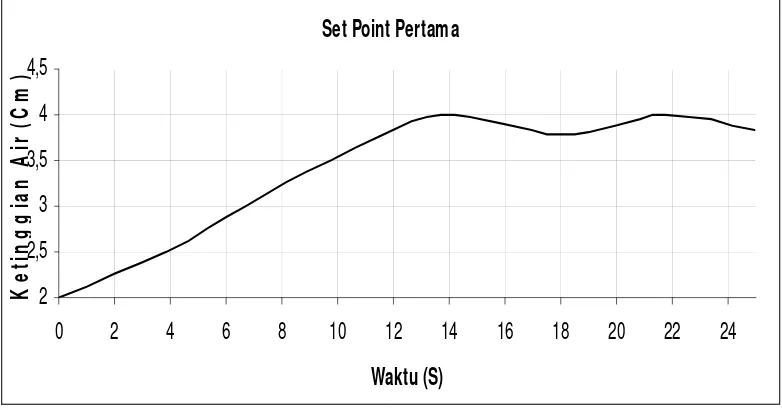
Berdasarkan data tabel 4.1, maka dapat diperoleh tanggapan sistem
pada saat kran pembuangan tertutup. Tanggapan sistem ini diperoleh dari
data antara ketinggian air dengan data waktu yang telah diamati. Gambar
4.2a ditunjukkan grafik perbandingan antara ketinggian air terhadap waktu
pada saat kran pembuangan tertutup.
Set Point Pertama
2 2,5 3 3,5 4 4,5
0 2 4 6 8 10 12 14 16 18 20 22 24
Waktu (S)
K
e
ti
nggi
a
n A
ir
(
C
m
)
Gambar 4.2a. Grafik pengamatan untuk set point pertama (kran pembuangan tertutup).
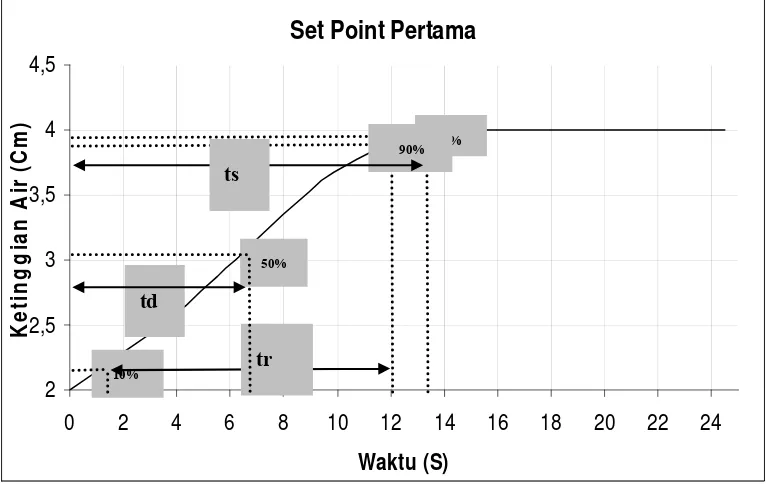
Dari grafik gambar 4.2a dapat diketahui tanggapan sistem
pengendali pada set point pertama saat kran pembuangan tertutup bersifat stabil yaitu mencapai ketinggian 4 Cm, dengan karakteristik seperti yang
terlihat pada gambar 4.2b.
delay time (td) = t(50%)
= 6,64 detik
rise time (tr) = t(90%) - t(10%)
= 11,96 – 1.32
= 10,63 detik
Settling Time(ts) = t98%
Set Point Pertama 2 2,5 3 3,5 4 4,5
0 2 4 6 8 10 12 14 16 18 20 22 24
Waktu (S) K e ti nggi a n A ir ( C m ) 98% 90% 10% 50% td tr ts
Gambar 4.2b Respon untuk set point pertama (kran pembungan tertutup).
b. Data pengamatan pada set point pertama saat kran pembuangan terbuka 50%. Dalam tabel 4.2 ditunjukkan data pengamatan ketinggian air
terhadap waktu untuk set point pertama saat kran pembuangan terbuka 50%.
Tabel 4.2 Data pengamatan set point pertama (kran pembuangan terbuka 50%)
No Waktu (detik)
Ketinggian Air (Cm)
Tegangan keluaran sensor (volt)
1 0 2 3,42
2 3,84 2,5 3,51
3 6,7 3 3,57
4 9,75 3,5 3,7
5 13,68 4 3,81
6 17,98 3,8 3,77
7 21,73 4 3,81
Berdasarkan data tabel 4.2, maka dapat diperoleh tanggapan sistem
pada saat kran pembuangan terbuka 50%. Tanggapan sistem ini diperoleh
dari data antara ketinggian air dengan data waktu yang telah diamati.
Gambar 4.3a ditunjukkan grafik perbandingan antara ketinggian air
terhadap waktu pada saat kran pembuangan terbuka 50%.
Set Point Pertama
2 2,5 3 3,5 4 4,5
0 2 4 6 8 10 12 14 16 18 20 22 24
Waktu (S)
Ke
ti
n
gg
ia
n
A
ir
(
Cm
)
Gambar 4.3. Grafik pengamatan untuk set point pertama (kran pembuangan terbuka 50%).
Dari grafik gambar 4.3 dapat diketahui tanggapan sistem
pengendali pada set point pertama saat kran pembuangan terbuka 50%. Terlihat bahwa sistem mengalami osilasi. Sistem mengalami osilasi dari
ketinggian 3,8 Cm sampai 4 Cm. Karena sistem berosilasi, maka sistem
disebut mengalami gangguan. Error osilasi untuk sistem ini dapat dicari dengan cara membagi antara selisih nilai saat sistem berosilasi dengan
Contoh perhitungan error osilasi untuk set point pertama saat kran pembuangan terbuka 50%, sebagai berikut :
Set Point = 4 cm
Ketinggian air minimal saat berosilasi = 3,8 cm
Error Osilasi = 100%
Point Set
berosilasi saat
minimal air
tinggi -Point Set
×
=
(
)
100%cm 4
cm 3,8 -4
×
=
(
)
100%cm 4
cm 3,8 -4
×
= 5%
Error osilasi dalam persen untuk set point ini sebesar 5 %. Dengan
error osilasi sebesar 5%, sistem masih dapat dikatakan baik karena besar
error osilasi tidak melebihi 5%.
delay time (td) = t(50%)
= 6,93 detik
rise time (tr) = t(90%) - t(10%)
= 12,47 – 1.38
= 11,09 detik
Settling Time(ts) = t98%
= 13,40 detik.
terhadap waktu untuk set point pertama saat kran pembuangan terbuka 75%.
Tabel 4.3 Data pengamatan set point pertama (kran pembuangan terbuka 75%)
No Waktu (detik)
Ketinggian Air (Cm)
Tegangan keluaran sensor (volt)
1 0 2 3,42
2 3,98 2,5 3,51
3 6,89 3 3,57
4 9,95 3,5 3,7
5 13,86 4 3,81
6 18,13 3,8 3,77
7 21,94 4 3,81
8 25,26 3,8 3,77
Berdasarkan data tabel 4.3, maka dapat diperoleh tanggapan sistem
pada saat kran pembuangan terbuka 75%. Tanggapan sistem ini diperoleh
dari data antara ketinggian air dengan data waktu yang telah diamati.
Gambar 4.4 ditunjukkan grafik perbandingan antara ketinggian air
terhadap waktu pada saat kran pembuangan terbuka 75%.
Se t Point Pe rtama
2 2,5 3 3,5 4 4,5
0 2 4 6 8 10 12 14 16 18 20 22 24
Waktu (S)
K
e
ti
ngg
ia
n A
ir
(
C
m
)
Dari grafik gambar 4.3 dapat diketahui tanggapan sistem
pengendali pada set point pertama saat kran pembuangan terbuka 75%. Terlihat bahwa sistem mengalami osilasi. Sistem mengalami osilasi dari
ketinggian 3,88 Cm sampai 4 Cm. Karena sistem berosilasi, maka sistem
disebut mangalami gangguan. Error osilasi dalam persen untuk set point
ini sebesar 3 %. Dengan error osilasi sebesar 3%, sistem masih dapat dikatakan baik karena besar error osilasi tidak melebihi 5%.
delay time (td) = t(50%)
= 6,84 detik
rise time (tr) = t(90%) - t(10%)
= 12,31 – 1.36
= 10,95 detik
Settling Time(ts) = t98%
= 13,58 detik.
4.2.2 Pengamatan Delay Time, Rise Time, dan Settling Time pada Set point
Kedua (8 cm)
Tegangan pada set point kedua sebesar 4,9 Volt, yang menunjukkan ketinggian air 8 cm (tabel 3.1). Pengukuran dilakukan dari
kondisi ketinggian awal yaitu 2 cm dengan tegangan sensor sebesar 3,42
Volt.
a. Data pengamatan pada set point kedua saat kran pembuangan tertutup. Dalam tabel 4.4 ditunjukkan data pengamatan ketinggian air
Tabel 4.4 Data pengamatan untuk set point kedua (kran pembuangan tertutup)
No Waktu (detik)
Ketinggian Air (Cm)
Tegangan keluaran sensor (volt)
1 0 2 3.42
2 4,57 2,5 3.51
3 8,29 3 3.67
4 11,39 3,5 3.73
5 14,64 4 3.87
6 17,13 4,5 3.97
7 20,45 5 4.2
8 24,1 5,5 4.35
9 26,9 6 4.47
10 30,6 6,5 4.59
11 33,4 7 4.74
12 35,82 7,5 4.81
13 39,32 7,8 4.89
14 42,11 8 4.92
15 45,1 8 4.92
16 47,76 8 4.92
17 49,23 8 4.92
18 51,11 8 4.92
19 53,23 8 4.92
Berdasarkan data tabel 4.4, maka dapat diperoleh tanggapan sistem
pada saat kran pembuangan tertutup. Tanggapan sistem ini diperoleh dari
data antara ketinggian air dengan data waktu yang telah diamati. Gambar
4.5a ditunjukkan grafik perbandingan antara ketinggian air terhadap waktu
Set Point Kedua
2 3 4 5 6 7 8
0 5 10 15 20 25 30 35 40 45 50 55
Waktu (S)
K
e
ti
nggi
a
n A
ir
(C
m
)
Gambar 4.5a. Grafik pengamatan untuk set point kedua (kran pembuangan tertutup)
Dari grafik gambar 4.5a dapat diketahui tanggapan sistem
pengendali pada set point kedua saat kran pembuangan tertutup bersifat stabil yaitu mencapai ketinggian 8 Cm, dengan karakteristik seperti yang
terlihat pada gambar 4.2b.
delay time (td) = t(50%)
= 21,1 detik
rise time (tr) = t(90%) - t(10%)
= 37,89 – 4,21
= 33,68 detik
Settling Time(ts) = t98%
Set Point Kedua 2 3 4 5 6 7 8
0 5 10 15 20 25 30 35 40 45 50 55
Waktu (S) K e ti ngg ia n A ir ( C m ) 10% 50% 90% ts td tr 98%
Gambar 4.5b Respon untuk set point kedua (kran pembuangan tertutup)
b. Data pengamatan pada set point kedua saat kran pembuangan terbuka 50%. Dalam tabel 4.5 ditunjukkan data pengamatan ketinggian air
terhadap waktu untuk set point kedua saat kran pembuangan terbuka 50%. Tabel 4.5 Data pengamatan untuk set point kedua
(kran pembuangan terbuka 50%)
No Waktu (detik)
Ketinggian Air (Cm)
Tegangan keluaran sensor (volt)
1 0 2 3.42
2 4,68 2,5 3.51
3 8,51 3 3.67
4 11,61 3,5 3.73
5 14,89 4 3.87
6 17,32 4,5 3.97
7 20,75 5 4.2
8 24,36 5,5 4.35
9 27,1 6 4.47
10 30,97 6,5 4.59
11 33,78 7 4.74
12 35,99 7,5 4.81
13 39,79 7,8 4.89
14 42,48 8 4.92
15 45,54 7,8 4.89
16 47,83 8 4.92
17 49,64 7,8 4.89
18 51,77 8 4.92
Berdasarkan data tabel 4.5, maka dapat diperoleh tanggapan sistem
pada saat kran pembuangan terbuka 50%. Tanggapan sistem ini diperoleh
dari data antara ketinggian air dengan data waktu yang telah diamati.
Gambar 4.6 ditunjukkan grafik perbandingan antara ketinggian air
terhadap waktu pada saat kran pembuangan terbuka 50%.
Set Point Kedua
2 3 4 5 6 7 8
0 5 10 15 20 25 30 35 40 45 50 55
W a ktu (S)
K
e
ti
n
g
g
ia
n
A
ir
(
C
m
)
Gambar 4.6. Grafik pengamatan untuk set point kedua (kran pembuangan terbuka 50%).
Dari grafik gambar 4.6 dapat diketahui tanggapan sistem
pengendali pada set point kedua saat kran pembuangan terbuka 75%. Terlihat bahwa sistem mengalami osilasi. Sistem mengalami osilasi dari
ketinggian 7,86 Cm sampai 8 Cm. Karena sistem berosilasi, maka sistem
disebut mangalami gangguan. Error osilasi dalam persen untuk set point
ini sebesar 1,7 %. Dengan error osilasi sebesar 1,7 %, sistem masih dapat dikatakan baik karena besar error osilasi tidak melebihi 5%.
delay time (td) = t(50%)
= 21,24 detik
rise time (tr) = t(90%) - t(10%)
= 38,23 – 4,28
Settling Time(ts) = t98%
= 41,63 detik
c. Data pengamatan pada set point kedua saat kran pembuangan terbuka 75%. Dalam tabel 4.6 ditunjukkan data pengamatan ketinggian air
terhadap waktu untuk set point kedua saat kran pembuangan terbuka 75%. Tabel 4.6 Data pengamatan untuk set point kedua
(kran pembuangan terbuka 75%)
Berdasarkan data tabel 4.6, maka dapat diperoleh tanggapan sistem
pada saat kran pembuangan terbuka 75%. Tanggapan sistem ini diperoleh
dari data antara ketinggian air dengan data waktu yang telah diamati.
Gambar 4.7 ditunjukkan grafik perbandingan antara ketinggian air
terhadap waktu pada saat kran pembuangan terbuka 75%. No Waktu
(detik)
Ketinggian Air (Cm)
Tegangan keluaran sensor (volt)
1 0 2 3.42
2 4,79 2,5 3.51
3 8,82 3 3.67
4 11,91 3,5 3.73
5 15,2 4 3.87
6 17,62 4,5 3.97
7 20,95 5 4.2
8 24,77 5,5 4.35
9 27,34 6 4.47
10 30,9 6,5 4.59
11 33,8 7,5 4.74
12 36,23 7,5 4.81
13 39,88 7,8 4.89
14 42,78 8 4.92
15 45,79 7,8 4.89
16 47,91 8 4.92
17 49,84 7,8 4.89
18 51,97 8 4.92
Set Point Kedua
2 3 4 5 6 7 8
0 5 10 15 20 25 30 35 40 45 50 55
W a ktu (S)
K
e
ti
n
g
g
ia
n
A
ir
(
C
m
)
Gambar 4.7. Grafik pengamatan untuk set point kedua (kran pembuangan terbuka 75%).
Dari grafik gambar 4.7 dapat diketahui tanggapan sistem
pengendali pada set point kedua saat kran pembuangan terbuka 75%. Terlihat bahwa sistem mengalami osilasi. Sistem mengalami osilasi dari
ketinggian 7,88 Cm sampai 8 Cm. Karena sistem berosilasi, maka sistem
disebut mangalami gangguan. Error osilasi dalam persen untuk set point
ini sebesar 1,5 %. Dengan error osilasi sebesar 1,5%, sistem masih dapat dikatakan baik karena besar error osilasi tidak melebihi 5%.
delay time (td) = t(50%)
= 21,39 detik
rise time (tr) = t(90%) - t(10%)
= 38,5 – 4,278
= 34,22 detik
Settling Time(ts) = t98%
= 41,92 detik
4.2.3 Pengamatan Delay Time, Rise Time, dan Settling Time pada Set
point Ketiga (12 cm)
menunjukkan ketinggian air 12 cm (tabel 3.1). Pengukuran dilakukan dari
kondisi ketinggian awal yaitu 2 cm dengan tegangan sensor sebesar 3,42
Volt.
a. Data pengamatan pada set point ketiga saat kran pembuangan tertutup. Dalam tabel 4.7 ditunjukkan data pengamatan ketinggian air
terhadap waktu untuk set point ketiga saat kran pembuangan tertutup. Tabel 4.7 Data pengamatan untuk set point ketiga
(kran pembuangan tertutup)
No Waktu (detik)
Ketinggian Air (Cm)
Tegangan keluaran sensor