JURNAL TEODOLITA
VOL. 15 NO. 1, Juni 2014 ISSN 1411-1586
DAFTAR ISI
Mesjid Saka Tunggal Sebagai Ruang Ritual Komunitas Islam
ABOGE di Desa Cikakak Banyumas……….………. 1 - 11
Wita Widyandini, Yohana Nursruwening
Analisa Tingkat Pelayanan Jalan Simpang Bersinyal Dengan Program Manual Kapasitas Jalan Indonesia (MKJI) 1997 (Studi kasus Simpang
Empat DKT Purwokerto………...………...12 - 22
Pingit Broto Atmadi
Pengaruh Orientasi Obyek Pada Algoritma Template Matching..……...23 - 33
Kholistianingsih
Pengaruh Faktor Spekulasi Pasar Terhadap Harga Properti
Perumahan Di Wilayah Perkotaan………....………...34 - 48
Dwi Jati Lestariningsih, Basuki
Teknologi Mikrokontroler Untuk Mengukur Panjang Kabel.…………...49 - 58
Priyono Yulianto
Pemanfaatan Abu Limbah Rotan Sebagai Campuran Adukan Beton...59 - 72
JURNAL TEODOLITA
VOL. 15 NO. 1, Juni 2014 ISSN 1411-1586
HALAMAN REDAKSI
Jurnal Teodolita adalah jurnal imiah fakultas teknik Universitas Wijayakusuma Purwokerto yang merupakan wadah informasi berupa hasil penelitian, studi literatur maupun karya ilmiah terkait. Jurnal Teodolita terbit 2 kali setahun pada bulan Juni dan Desember.
Penanggungjawab : Dekan Fakultas Teknik Universitas Wijayakusuma Purwokerto Pemimpin Redaksi : Taufik Dwi Laksono, ST MT
Sekretaris : Dwi Sri Wiyanti, ST MT Bendahara : Basuki,ST MT
Editor : Drs. Susatyo Adhi Pramono, M.Si Tim Reviewer : Taufik Dwi Laksono, ST MT
Iwan Rustendi, ST MT
Yohana Nursruwening, ST MT Wita Widyandini, ST MT Priyono Yulianto, ST MT Kholistianingsih, ST MT Alamat Redaksi : Sekretariat Jurnal Teodolita
Fakultas Teknik Universitas Wijayakusuma Purwokerto Karangsalam-Beji Purwokerto
Telp 0281 633629
Email : [email protected]
Tim Redaksi berhak untuk memutuskan menyangkut kelayakan tulisan ilmiah yang dikirim oleh penulis. Naskah yang di muat merupakan tanggungjawab penulis sepenuhnya dan tidak berkaitan dengan Tim Redaksi.
PENGARUH ORIENTASI OBYEK PADA ALGORITMA TEMPLATE MATCHING
Kholistianingsih
Teknik Elektro Universitas Wijayakusuma Purwokerto
Abstrak
Image processing merupakan bidang ilmu yang masih terus berkembang dan
memerlukan penelitian yang berkelanjutan. Penelitian ini menguji pengaruh orientasi obyek terhadap keberhasilan algoritma template matching. Input pengujian merupakan citra dengan sudut kemiringan obyek yang berbeda. Tujuannya adalah untuk memperoleh batas sudut kemiringan tertinggi yang masih dapat dideteksi dengan tepat. Penelitian ini menunjukkan bahwa algoritma pencocokan template masih sangat baik dalam keberhasilannya mendeteksi benda/obyek dengan orientasi yang berbeda. Sudut kemiringan tertinggi yang dapat dideteksi adalah 15,8.
Kata kunci : template matching, orientasi obyek, sudut kemiringan
PENDAHULUAN
Citra adalah kumpulan piksel-piksel yang disusun dalam larik dua dimensi. Piksel adalah sampel dari pemandangan yang mengandung intensitas citra yang dinyatakan dalam bilangan bulat. Hal inilah yang membuat citra menjadi obyek yang dapat diolah. Pengolahan citra atau image processing merupakan bidang ilmu yang masih terus berkembang dan memerlukan penelitian yang berkelanjutan.
Algoritma Template matchng merupakan salah satu metode untuk menemukan sebuah obyek dalam sebuah citra. Sebuah penelitian [1] menguji kepekaan algoritma
template matching untuk mendeteksi benda pada sebuah citra dengan variabel lokasi benda.
Hasil pengujian menunjukkan bahwa tingkat keberhasilan deteksi objek memiliki nilai yang signifikan yaitu 100%. Hal ini menunjukkan bahwa perubahan lokasi benda tidak mengurangi tingkat keberhasilan deteksi.
Penelitian selanjutnya [2] melakukan pengujian untuk menentukan batas kekaburan citra yang masih bisa ditoleransi dalam deteksi benda dengan menggunakan metode template
Teodolita Vol.15, No.1., Juni 2014:23-33 24
penelitian menunjukkan bahwa metode ini mampu mendeteksi benda/objek kabur dengan baik dalam batas radius efek gaussian yang diterapkan kurang dari 1,7 piksel.
Penelitian ini merupakan kelanjutan dari dua penelitian di atas. Pada penelitian ini diuji pengaruh orientasi obyek terhadap keberhasilan algoritma template matching. Input pengujian merupakan citra dengan sudut kemiringan obyek yang berbeda. Tujuannya adalah untuk memperoleh batas sudut kemiringan tertinggi yang masih dapat dideteksi dengan tepat.
LANDASAN TEORI
A. Template Matching
Template matching adalah proses mencari suatu obyek (template) di dalam
suatu citra digital. Template dibandingkan dengan keseluruhan objek tersebut dan bila
template cocok (cukup dekat) dengan suatu objek yang belum diketahui pada citra
tersebut maka objek tersebut ditandai sebagai template.
Perbandingan antara template dengan keseluruhan objek pada citra dapat dilakukan dengan menghitung selisih jaraknya, seperti ditunjukkan pada persamaan 1.
(1) Dengan f(j,k) menyatakan citra tempat objek yang akan dibandingkan dengan template T(j,k), sedangkan D(m,n) menyatakan jarak antara template dengan objek pada citra. Pada umumnya template lebih kecil dari ukuran citra.
Secara ideal, template dikatakan cocok dengan objek pada citra bila D(m,n) = 0, namun kondisi tersebut akan sulit dipenuhi apalagi jika template merupakan citra grayscale. Oleh karena itu, kondisi yang dicari adalah jika D(m,n) minimum. Hal ini akan terpenuhi jika nilai korelasi maksimum pada semua lokasi (m,n). Persamaan 2 menunjukkan rumus korelasi
[1-7].
(2)
B. Rotasi
Rotasi merupakan suatu transformasi geometri memindahkan nilai-nilai piksel dari posisi awal menuju posisi akhir yang ditentukan melalui nilai variabel rotasi sebesar atau garis horizontal dari citra.
Proses rotasi dapat dilakukan dengan persamaan berikut:
(3) (4) Di mana (x0,y0) adalah koordinat titik pusat dari citra input dan adalah sumbu putar. Sumbu
putar apada umumnya memiliki arah putar searah jarum jam denga garis horizontal. Seperti halnya operasi translasi, hasil perhitungan posisi hasil rotasi dapat memberikan nilai di luar batas citra output (apabila ukuran citra output sama dengan citra input) [3].
METODOLOGI
Langkah-langkah pada algoritma deteksi benda dijelaskan sebagai berikut [2]:
a. Pra Pengolahan Citra
Pra pengolahan citra meliputi proses-proses yaitu pengubahan ukuran citra, pengubahan citra menjadi grayscale, dan menerapkan operasi rotasi dengan sudut kemiringan yang berbeda.
Proses pengubahan ukuran citra dan pengubahan citra menjadi grayscale dilakukan terhadap citra template dan citra uji. Proses penerapan operasi rotasi dilakukan pada citra uji untuk memperoleh citra uji dengan sudut kemiringan yang terukur. Sudut kemiringan semakin tinggi dengan perubahan kecil yaitu 1. Opersi rotasi dilakukan searah jarum jam.
b. Membaca input citra template dan citra uji
Langkah kedua merupakan langkah untuk menetapkan input sebagai citra template dan citra uji. Pada algoritma ini dibatasi bahwa citra template adalah citra dengan ukuran yang lebih kecil.
c. Menghitung nilai korelasi.
Langkah ini merupakan langkah untuk menghitung nilai korelasi citra template terhadap citra uji pada setiap pergeseran titik koordinat pada citra uji. Nilai korelasi dihitung dengan persamaan 2.
d. Menentukan Nilai Korelasi Tertinggi Sebagai Pemenang
Langkah ini merupakan langkah untuk menentukan nilai korelasi tertinggi yang diperoleh. Lokasi titik koordinat citra uji dimana diperoleh nilai tersebut disimpan.
e. Menandai lokasi pemenang dengan garis kotak putih.
Langkah ini merupakan langkah untuk menentukan hasil deteksi. Hasil deteksi ditunjukkan dengan menandai lokasi dengan kotak bergaris putih.
Teodolita Vol.15, No.1., Juni 2014:23-33 26
DATA PENGAMATAN
Data yang digunakan pada penelitian ini adalah sebuah data template sebagai data referensi dengan ukuran 72x26 piksel dan 110 buah citra uji yang berukuran 174x131 piksel. Data citra telah diubah dalam bentuk grayscale melalui proses pra pengolahan citra.
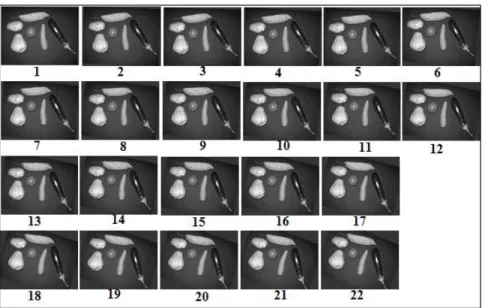
Citra Template ditunjukkan pada Gambar 1, yang merupakan citra dari obyek deteksi yang berupa pare. Gambar 2 menunjukkan sampel citra uji, yang merupakan kumpulan beberapa jenis sayuran. Citra uji merupakan hasil pra pengolahan citra dengan menerapkan operasi rotasi dengan orientasi yang berbeda. Variabel orientasi berupa nilai sudut kemiringan hasil operasi rotasi. Operasi rotasi dilakukan searah jarum jam. Data citra uji yang digunakan adalah 5 citra uji. Setiap citra uji terdiri dari 22 citra uji dengan sudut kemiringan 1 sampai dengan 22. Gambar 3 merupakan 22 buah citra uji 1 dengan sudut kemiringan 1 sampai dengan 22.
Gambar 1. Citra Referensi
Gambar 2. Kumpulan citra uji 1 dengan perbedaan orientasi atau sudut kemiringan
HASIL DAN PEMBAHASAN
Pengujian dilakukan terhadap 5x22 buah citra uji yang merupakan citra hasil pra pengolahan citra. Citra-citra tersebut merupakan citra dengan orientasi yang
berbeda.Citra-citra ini diperoleh dengan melakukan operasi rotasi dengan sudut yang berbeda berbeda. Pada penelitian ini, ditentukan batas maksimum sudut perlakuan rotasi yang masih dapat ditoleransi oleh algoritma template matching.
Gambar 3 menunjukkan sampel hasil deteksi. Gambar 3.a menunjukkan sampel yang menunjukkan true detection (benar deteksi), dan . Gambar 3.b menunjukkan sampel yang menunjukkan false detection (salah deteksi). Keberhasilan deteksi ditunjukkan dengan tanda kotak dengan garis berwarna putih pada lokasi yang ditentukan sebagai objek deteksi. Sampel true detection menandai hasil deteksi pada objek sesuai dengan objek pada citra template, yaitu buah apel. Sampel false detection menandai hasil deteksi tidak pada lokasi objek sesuai dengan objek pada citra template [2].
Hasil Deteksi
(a)
Hasil Deteksi
(b) Gambar 3. Hasil deteksi (a) True detection, (b) False detection
Pada Gambar 4, ditunjukkan grafik yang menggambarkan posisi titik koordinat hasil deteksi. Gambar 4.a adalah grafik titik koordinat (x,y) hasil deteksi pada citra uji 1. Citra uji 1 terdiri dari 22 citra dengan orientasi atau sudut kemiringan 1 sampai dengan 22. Pada grafik tampak bahwa ada dua kelompok kumpulan titik. Kelompok pertama berupa kumpulan titik yang terdiri dari 14 titik berurutan dengan pergeseran kecil. Kelompok kedua berupa kumpulan titik yang terdiri dari 8 titik yang tidak teratur dan terpisah jauh dari kelompok yang pertama. Hal ini menunjukkan perbedaan antara titik-titik yang mendeteksi pada posisi yang tepat dan titik-titik yang mendeteksi pada posisi yang tidak tepat. Kelompok yang mendeteksi dengan tepat adalah kelompok yang pertama. Pergeseran titik hasil deteksi adalah pengaruh dari perubahan orientasi atau sudut kemiringan obyek. Perubahan sudut 1 menyebabkan posisi obyek tergeser dengan perubahan yang kecil yaitu 1 sampai dengan 3 piksel. Oleh karena itu seiring dengan kenaikan sudut kemiringan, posisi titik deteksi tergeser
Teodolita Vol.15, No.1., Juni 2014:23-33 28
dan membentuk grafik yang halus. Pada citra uji 1, sudut kemiringan terbesar yang masih mendeteksi dengan tepat adalah 14.
10 15 20 25 30 35 35 40 45 50 55 60 65 koordinat deteksi (x) k o o rd in a t d e te k s i (y ) Citra uji 1 (a) 0 10 20 30 40 50 60 70 80 90 40 45 50 55 60 65 70 75 koordinat deteksi (x) k o o rd in a t d e te k s i (y ) Citra uji 2 (b) 0 20 40 60 80 100 120 0 20 40 60 80 100 120 koordinat deteksi (x) k o o rd in a t d e te k s i (y ) Citra uji 3 (c) 80 85 90 95 100 105 110 115 120 90 95 100 105 koordinat deteksi (x) k o o rd in a t d e te k s i (y ) Citra uji 4 (d)
30 40 50 60 70 80 90 100 45 50 55 60 65 70 75 koordinat deteksi (x) k o o rd in a t d e te k s i (y ) Citra uji 5 (e)
Gambar 4. Grafik titik kordinat (x,y) citra uji, (a) Grafik titik koordinat citra uji 1, (b) Grafik titik koordinat citra uji 2, (c) Grafik titik koordinat citra uji 3, (d) Grafik titik koordinat citra
uji 4, (e) Grafik titik koordinat citra uji 5
Gambar 4.b adalah grafik titik koordinat (x,y) hasil deteksi pada citra uji 2. Citra uji 2 terdiri dari 22 citra dengan orientasi atau sudut kemiringan 1 sampai dengan 22. Pada grafik tampak bahwa ada dua kelompok kumpulan titik. Kelompok pertama berupa kumpulan titik yang terdiri dari 15 titik berurutan dengan pergeseran kecil. Kelompok kedua berupa kumpulan titik yang terdiri dari 7 titik yang tidak teratur dan terpisah jauh dari kelompok yang pertama. Hal ini menunjukkan perbedaan antara titik-titik yang mendeteksi pada posisi yang tepat dan titik-titik yang mendeteksi pada posisi yang tidak tepat. Kelompok yang mendeteksi dengan tepat adalah kelompok yang pertama. Pergeseran titik hasil deteksi adalah pengaruh dari perubahan orientasi atau sudut kemiringan obyek. Perubahan sudut 1 menyebabkan posisi obyek tergeser dengan perubahan yang kecil yaitu 1 sampai dengan 3 piksel. Oleh karena itu seiring dengan kenaikan sudut kemiringan, posisi titik deteksi tergeser dan membentuk grafik yang halus. Pada citra uji 2, sudut kemiringan terbesar yang masih mendeteksi dengan tepat adalah 15.
Gambar 4.c adalah grafik titik koordinat (x,y) hasil deteksi pada citra uji 3. Citra uji 3 terdiri dari 22 citra dengan orientasi atau sudut kemiringan 1 sampai dengan 22. Pada grafik tampak bahwa ada dua kelompok kumpulan titik. Kelompok pertama berupa kumpulan titik yang terdiri dari 20 titik berurutan dengan pergeseran kecil. Kelompok kedua berupa kumpulan titik yang terdiri dari 1 titik yang tidak teratur dan terpisah jauh dari kelompok yang pertama. Hal ini menunjukkan perbedaan antara titik-titik yang mendeteksi
Teodolita Vol.15, No.1., Juni 2014:23-33 30
pada posisi yang tepat dan titik-titik yang mendeteksi pada posisi yang tidak tepat. Kelompok yang mendeteksi dengan tepat adalah kelompok yang pertama. Pergeseran titik hasil deteksi adalah pengaruh dari perubahan orientasi atau sudut kemiringan obyek. Perubahan sudut 1 menyebabkan posisi obyek tergeser dengan perubahan yang kecil yaitu 1 sampai dengan 3 piksel. Oleh karena itu seiring dengan kenaikan sudut kemiringan, posisi titik deteksi tergeser dan membentuk grafik yang halus. Pada citra uji 3, sudut kemiringan terbesar yang masih mendeteksi dengan tepat adalah 20.
Gambar 4.d adalah grafik titik koordinat (x,y) hasil deteksi pada citra uji 4. Citra uji 4 terdiri dari 22 citra dengan orientasi atau sudut kemiringan 1 sampai dengan 22. Pada grafik tampak bahwa ada dua kelompok kumpulan titik. Kelompok pertama berupa kumpulan titik yang terdiri dari 15 titik berurutan dengan pergeseran kecil. Kelompok kedua berupa kumpulan titik yang terdiri dari 7 titik yang tidak teratur dan terpisah jauh dari kelompok yang pertama. Hal ini menunjukkan perbedaan antara titik-titik yang mendeteksi pada posisi yang tepat dan titik-titik yang mendeteksi pada posisi yang tidak tepat. Kelompok yang mendeteksi dengan tepat adalah kelompok yang pertama. Pergeseran titik hasil deteksi adalah pengaruh dari perubahan orientasi atau sudut kemiringan obyek. Perubahan sudut 1 menyebabkan posisi obyek tergeser dengan perubahan yang kecil yaitu 1 sampai dengan 3 piksel. Oleh karena itu seiring dengan kenaikan sudut kemiringan, posisi titik deteksi tergeser dan membentuk grafik yang halus. Pada citra uji 4, sudut kemiringan terbesar yang masih mendeteksi dengan tepat adalah 15.
Gambar 4.e adalah grafik titik koordinat (x,y) hasil deteksi pada citra uji 5. Citra uji 5 terdiri dari 22 citra dengan orientasi atau sudut kemiringan 1 sampai dengan 22. Pada grafik tampak bahwa ada dua kelompok kumpulan titik. Kelompok pertama berupa kumpulan titik yang terdiri dari 15 titik berurutan dengan pergeseran kecil. Kelompok kedua berupa kumpulan titik yang terdiri dari 7 titik yang tidak teratur dan terpisah jauh dari kelompok yang pertama. Hal ini menunjukkan perbedaan antara titik-titik yang mendeteksi pada posisi yang tepat dan titik-titik yang mendeteksi pada posisi yang tidak tepat. Kelompok yang mendeteksi dengan tepat adalah kelompok yang pertama. Pergeseran titik hasil deteksi adalah pengaruh dari perubahan orientasi atau sudut kemiringan obyek. Perubahan sudut 1 menyebabkan posisi obyek tergeser dengan perubahan yang kecil yaitu 1 sampai dengan 3 piksel. Oleh karena itu seiring dengan kenaikan sudut kemiringan, posisi titik deteksi tergeser
dan membentuk grafik yang halus. Pada citra uji 5, sudut kemiringan terbesar yang masih mendeteksi dengan tepat adalah 15.
Gambar 5 merupakan grafik nilai korelasi dari 5 citra uji. Setiap citra uji telah diubah-ubah dengan menerapkan operasi rotasi dengan sudut kemiringan tertentu. Pada grafik ini, sumbu x menunjukkan data ke-x, dan sumbu y menunjukkan nilai korelasi tertinggi dan nilai korelasi terendah. Setiap pasangan kurva mewakili satu citra uji terhadap kenaikan Sudut kemiringan. Nilai korelasi tertinggi adalah nilai korelasi pemenang pada algoritma deteksi objek dengan metode pencocokan template ini. Pada grafik terlihat bahwa nilai korelasi tertinggi menurun seiring dengan kenaikan sudut kemiringan. Sedangan nilai korelasi terendah relatif tetap. Hal ini menunjukkan bahwa rentang nilai korelasi menurun.
Tabel 1 menunjukkan sudut kemiringan tertinggi yang dapat dideteksi dengan baik dari setiap citra uji. Sudut kemiringan tertinggi rata-rata adalah 15,8. Hal ini menunjukkan bahwa algoritma template matching dapat berfungsi dengan baik jika input pada orientasi yang maksimal mempunyai sudut kemiringan 15,8 terhadap orientasi citra template.
0 5 10 15 20 25 0 0.5 1 1.5 2 2.5x 10 5
sudut rotasi (derajat)
K o re la s i Citra uji 1 Terendah Tertinggi (a) 0 5 10 15 20 25 0 0.5 1 1.5 2 2.5x 10 5
sudut rotasi (derajat)
K o re la s i Citra uji 2 Terendah Tertinggi (b)
Teodolita Vol.15, No.1., Juni 2014:23-33 32 0 5 10 15 20 25 0 0.5 1 1.5 2 2.5x 10 5
sudut rotasi (derajat)
K o re la s i Citra uji 3 Terendah Tertinggi (c) 0 5 10 15 20 25 0 0.5 1 1.5 2 2.5x 10 5
sudut rotasi (derajat)
K o re la s i Citra uji 4 Terendah Tertinggi (d) 0 5 10 15 20 25 0 0.5 1 1.5 2 2.5x 10 5
sudut rotasi (derajat)
K o re la s i Citra uji 5 Terendah Tertinggi (e)
Gambar 5. Grafik nilai korelasi citra uji, (a) Grafik nilai korelasi citra uji 1, (b) Grafik nilai korelasi citra uji 2, (c) Grafik nilai korelasi citra uji 3, (d) Grafik nilai korelasi citra uji 4, (e)
Grafik nilai korelasi citra uji 5
Tabel1. Sudut kemiringan tertinggi No Citra uji Sudut kemiringan tertinggi
1 2 3 4 5 Citra uji 1 Citra uji 2 Citra uji 3 Citra uji 4 Citra uji 5 14 15 20 15 15
KESIMPULAN
Penelitian ini menunjukkan bahwa algoritma pencocokan template masih sangat baik dalam keberhasilannya mendeteksi benda/obyek dengan orientasi yang berbeda. Sudut kemiringan tertinggi yang dapat dideteksi adalah 15,8.
Penelitian ini masih memilki banyak kekurangan. Penelitian ini masih dapat dikembangkan lagi dengan mengembangkannya menjadi sistem identifikasi obyek. Nilai korelasi juga perlu untuk dinormalisasi agar data dapat dijadikan acuan atau standar yang tetap.
DAFTAR PUSTAKA
[1] Kholistianingsih, Keberhasilan Deteksi Berbasis Pencocokan Template dengan Perubahan Lokasi Benda, Teodolita vol. 15 no. 1, 2013.
[2] Kholistianingsih, Pengaruh Efek Kabur Terhadap Keberhasilan Deteksi Obyek dengan Metode Template Matching, Teodolita vol. 15 no. 2, 2013.
[3] Putra, Darma, Pengolahan Citra Digital, Andi Offset, Yogyakarta, 2010.
[4] Hidayat, R., Kholistianingsih, Geometric Feature Extraction for Face Recognition, 5th
AUN/SEED-Net Regional Conference on Information and Communications Technology, Manila, 2012.
[5] Ahmad, Usman, Pengolahan Citra Digital & Teknik Pemrogramannya, Graha Ilmu, Yogyakarta, 2005
[6] Gonzales,R.C., Woods, R.E., Digital Image Processing, Prentice Hall, Third Edition. New Jersey, 2008
[7] Sonka, M,, Hlavac, V., and Boyle, R..,Image Processing, Analysis, and Machine