i
TUGAS AKHIR
DIGITALISASI ALAT UJI KUAT TEKAN BETON
Diajukan untuk memenuhi salah syarat
memperoleh gelar Sarjana Teknik pada
Program Studi Teknik Elektro
Jurusan Teknik Elektro
Fakultas Sains dan Teknologi Universitas Sanata Dharma
Disusun Oleh :
YUSTINUS ANTON BASKORO NIM : 155114051
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
FINAL PROJECT
DIGITALIZATION OF CONCRETE PRESSURE
MACHINE TEST
In a partial fulfilment of the requirements
for the degree of Sarjana Teknik
Department of Electrical Engineering
Faculty of Science and Technology, Sanata Dharma University
Written By:
YUSTINUS ANTON BASKORO NIM : 155114051
DEPARTMENT OF ELECTRICAL ENGINEERING
FACULTY OF SCIENCE AND TECHNOLOGY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
iii
vi
Motto :
“Fortis Fortuna Adiuvat”
Skripsi ini kupersembahkan untuk :
1. Tuhan Yesus yang selalu memberkati setiap usaha yang kulakukan.
2. Keluarga tercinta, mama, kakak, dan alm. Papa.
3. Bapak Ir. Tjendro M.Kom selaku dosen pembimbing.
4. Bapak Petrus Setyo Prabowo S.T., M.T. selaku dosen penguji dan
Kaprodi Teknik Elektro Unversitas Sanata Dharma.
5. Bapak Martanto S.T., M.T. selaku dosen penguji.
6. Teman-teman Teknik Elektro Universitas Sanata Dharma angkatan
2015.
7. Bapak/Ibu dosen Prodi Teknik Elektro Universitas Sanata Dharma.
8. Serta seluruh keluarga dan teman-teman yang tidak bisa saya sebutkan
viii
INTISARI
Pada zaman sekarang ini perkembangan teknologi digital sangat pesat. Dengan berkembangnya teknologi digital segala kegiatan manusia menjadi mudah. kemudahan yang diberikan oleh teknologi digital dapat dipergunakan untuk membuat sebuah mesin dengan basis sistem digital.
Penelitan ini bertujuan untuk membuat sistem digital dari alat uji kuat tekan beton menggunakan sensor optik pada USB Mouse. Mikrokontroler yang digunakan adalah arduino yang menggunakan IDE (Integratred Development Environment). Untuk komunikasi USB Mouse dengan dengan Arduino digunakan modul USB Host Shield. Sensor optik bekerja untuk mendeteksi pergeseran dari alat uji kuat tekan tekan beton. Saat terjadi pergeseran nilai yang diperoleh dari sensor akan dikirm pada arduino. Arduino bertugas untuk mengolah nilai yang diperoleh sensor optik dan menampilkan data berupa nilai dari pengujian kuat tekan beton yang ditampilkan pada LCD (Liquid Crystal Display).
Arduino mengolah data optik mouse menjadi nilai kuat tekan beton untuk 4 skala output yaitu, 0-50000KgF, 0-100000KgF, 0-150000KgF, dan 0-200000KgF. Keypad berfungsi untuk mengatur skala output yang dibutuhkan dalam pengujian kuat tekan beton. Hasil penelitian ini adalah nilai uji kuat tekan beton yang ditampilkan pada LCD untuk 4 skala output untuk pergeseran 1cm sampai 11cm dengan nilai error maksimal 0,32%. Kata Kunci : teknologi digital, USB Host Shield, sensor optik, USB Mouse, Arduino.
ix
ABSTRACK
In this day and age, the development of digital technology is very fast. In this day and age, the development of digital technology is very fast. With the development of digital technology all human activities become easy. the convenience provided by digital technology can be used to make a machine based on a digital system.
This research aims to make a digital system of concrete compressive strength test machine using optical sensors on USB Mouse. The microcontroller used is Arduino which uses IDE (Integratred Development Environment). For communication USB Mouse with Arduino the module is used USB Host Shield. The optical sensor works to detect the movement of the concrete compressive strength test machine. When there is a movement in the value obtained from the sensor will be sent to Arduino. Arduino is tasked with processing the values obtained by the optical sensor and displaying data in the form of data from the concrete compressive strength test displayed on the LCD (Liquid Crystal Display).
Arduino processes mouse optical data into concrete compressive strength values for 4 output scales, namely, 0-50000KgF, 0-100000KgF, 0-150000KgF, and 0-200000KgF. The keypad functions to adjust the output scale required in testing the compressive strength of concrete. The results of this study are the concrete compressive strength test values displayed on the LCD for 4 output scales for a shift of 1cm to 11cm with a maximum error value of 0.32%.
xi
DAFTAR ISI
HALAMAN JUDUL (BAHASA INDONESIA) ... i
HALAMAN JUDUL (BAHASA INGGRIS) ... ii
LEMBAR PERSETUJUAN ... iii
LEMBAR PENGESAHAN ... iv
PERNYATAAN KEASLIAN KARYA ... v
MOTTO ... vi
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS ... vii
INTISARI ... viii
ABSTRACK ... ix
KATA PENGANTAR ... x
DAFTAR ISI ... xi
DAFTAR GAMBAR ... xiii
DAFTAR TABEL ... xv
DAFTAR LAMPIRAN ... xvi
BAB I PENDAHULUAN ... 1
1.1. Latar Belakang ... 1
1.2. Tujuan dan Manfaat Penelitian ... 2
1.3. Batasan Masalah ... 2
1.4. Metodologi Penelitian ... 2
BAB II DASAR TEORI ... 3
2.1. Sensor Optik ... 3
2.2. Arduino Uno ... 3
2.3. Keypad 4x4 ... 5
2.4. LCD (Liquid Crystal Display) ... 6
2.5. Optik Mouse ... 7
2.6. Beton ... 7
2.7. IDE Arduino ... 9
BAB III RANCANGAN PENELITIAN ... 11
3.1. Proses Kerja Alat ... 11
3.1.1.Proses kerja alat uji kuat tekan beton ... 11
3.1.2.Proses Kerja Sistem Digital Alat Uji Kuat Tekan Beton... 14
xii
3.3. Perancangan Perangkat Lunak... 17
BAB IV HASIL DAN PEMBAHASAN ... 20
4.1. Perangkat Keras (Hardware) ... 20
4.2. Perangkat Lunak (Software) ... 21
4.2.1.Inisialisasi Library ... 21
4.2.2.Inisialisasi Input/Output ... 22
4.2.3.Inisialisasi Bagian Mouse ... 23
4.2.4.Pembacaan Input dan Perintah ke Output... 24
4.3. Hasil Pengujian Alat ... 25
4.3.1.Hasil pengujian alat pada selektor 1 dengan nilai output 0-50000KgF ... 25
4.3.2.Hasil pengujian alat pada selektor2 dengan nilai output 0-100000KgF ... 29
4.3.3.Hasil pengujian alat pada selektor 3 dengan nilai output 0-150000KgF ... 32
4.3.4.Hasil pengujian alat pada selektor 4 dengan nilai output 0-200000KgF ... 35
BAB V KESIMPULAN DAN SARAN ... 39
5.1.Kesimpulan ... 39
5.2.Saran ... 39
DAFTAR PUSTAKA ... 40
xiii
DAFTAR GAMBAR
Gambar 1.1. Diagram Blok Sistem ... 2
Gambar 2.1. Rangkaian Sensor Optik ... 3
Gambar 2.2. Arduino Uno R3 ... 4
Gambar 2.3. Diagram Pinout Arduino... 4
Gambar 2.4. Matrix Keypad 4x4 ... 5
Gambar 2.5. LCD (Liquid Crystal Display) ... 7
Gambar 2.6. Proses Kerja Sensor Optik Mouse ... 8
Gambar 2.7. Beton Kubus ... 9
Gambar 2.8. Beton Silinder ... 9
Gambar 2.9. IDE Arduino ... 10
Gambar 3.1. MCB (Miature Circuit Breaker) ... 11
Gambar 3.2. Sistem Pressure ... 11
Gambar 3.3. Kontrol Sistem Valve Hidrolik ... 12
Gambar 3.4. Sistem Pendulum ... 12
Gambar 3.5. Sistem Pendulum dan Batang Besi ... 13
Gambar 3.6. Roda dan Batang Besi Sistem Penampil ... 13
Gambar 3.7. Penampil Nilai Kuat Tekan Pada Alat Uji Kuat Tekan Beton ... 14
Gambar 3.8. Sistem Penampil Alat Uji Kuat Tekan Beton ... 15
Gambar 3.9. Skema Peletakan Sensor Pada Sistem Penampil ... 15
Gambar 3.10. Blok Diagram Perancangan Hardware ... 16
Gambar 3.11. Rangkaian Elektronis ... 17
Gambar 3.12. Flowchart Perangkat Lunak ... 18
Gambar 4.1. Kotak Simulasi Digitalisai Alat Uji Kuat Tekan Beton Dari Atas ... 20
Gambar 4.2. Kotak Simulasi Digitalisai Alat Uji Kuat Tekan Beton Dari Samping ... 20
Gambar 4.3. Inisiasi Library ... 21
Gambar 4.4. Program Inisiasi Input/Output (1) ... 22
Gambar 4.5. Program Inisiasi Input/Output (2) ... 22
Gambar 4.6. Inisiasi Bagian Mouse... 23
Gambar 4.7. Pembacaan Input ... 24
Gambar 4.8. Pembacaan Input dan Perintah ke Output ... 24
Gambar 4.9. Grafik Data Pengujian dan Data Perhitungan Pada Selektor 1... 28
Gambar 4.10. Grafik Data Pengujian dan Data Perhitungan Pada Selektor 2 ... 31
xiv
xv
DAFTAR TABEL
Tabel 2.1. Fitur dan Spesifikasi Keypad Matrix 4x4 ... 6
Tabel 2.2. Spesifikasi Pin LCD ... 6
Tabel 4.1. Data Pengujian Sensor Dengan Jarak Pergeseran 11cm ... 24
Tabel 4.2. Data Percobaan selektor 1 dengan nilai output 0 sampai 50000KgF ... 25
Tabel 4.3. Nilai perhitungan data sensor dan nilai data sensor yang terbaca ... 27
Tabel 4.4. Data percobaan, data perhitungan dan error data pada selektor 1 ... 27
Tabel 4.5. Data Percobaan selektor 2 dengan nilai output 0 sampai 100000KgF ... 29
Tabel 4.6. Data percobaan, data perhitungan dan error data pada selektor 2 ... 31
Tabel 4.7. Data Percobaan selektor 3 dengan nilai output 0 sampai 150000KgF ... 32
Tabel 4.8. Data percobaan, data perhitungan dan error data pada selektor 3 ... 34
Tabel 4.9. Data Percobaan selektor 4 dengan nilai output 0 sampai 200000KgF ... 35
xvi
DAFTAR LAMPIRAN
Lampiran 1 Listing program Lengkap ... L-1 Lampiran 2 Datasheet Arduino ... L-7 Lampiran 3 Datasheet USB Host Shield ... L-8 Lampiran 4 Datasheet LCD 16x2 ... L-9
1
BAB I
PENDAHULUAN
1.1 Latar Belakang
Perkembangan teknologi digital turut mempengaruhi perkembangan ilmu pengetahuan dan berbagai aspek lainnya [1]. Di era digital saat ini perkembangan teknologi digital sangat memudahkan pekerjaan manusia di berbagai bidang. Dengan perkembangan teknologi digital setiap pekerjaan dapat dilakukan dengan mudah dan hasil yang diperoleh lebih optimal.
Terdapat beberapa kecanggihan teknologi digital seperti mudah bekerja, karena beroperas secara otomatis, cepat, berkualitas, efektif, effisien, mudah mentransfer data dan informasi ke media elektronik lain [2]. Pada saat ini teknologi digital sudah berkembang di berbagai aspek kehidupan manusia. Berbagai alat elektronik yang dibuat saat ini sudah memakai sistem digital untuk memudahkan dalam menggunakan dan mendapatkan suatu keluaran yang di inginkan.
Kemudahan dari suatu sistem digital dapat digunakan untuk membuat suatu sistem yang berfungsi untuk menguji suatu kuat tekan beton. Sistem ini akan digunakan pada sebuah alat uji kuat tekan beton yang berada di Balai Litbang Sabo Yogyakarta. Sistem ini dibuat karena alat uji kuat tekan beton yang ada di Balai Litbang Sabo merupakan suatu purwarupa model lama yang menggunakan sistem analog sehingga para peneliti cukup mengalami kesulitan saat melakukan pengujian kuat tekan beton karena pembacaan data output analog membutuhkan ketelitian yang cukup tinggi, apalagi para peneliti sudah berusia lanjut sehingga mengalami kesulitan dalam melakukan pembacaan hasil uji secara tepat.
Sistem yang akan dibuat memanfaatkan teknologi sensor optik. Sensor optik adalah suatu perangkat masukan yang berfungsi untuk memperoleh data dari suatu objek di sekitar sensor dengan bantuan cahaya. Sensor optik ini bertugas untuk memperoleh data dari perubahan bentuk permukaan disekitar sensor dan akan digunakan untuk memperoleh informasi dari pergerakan batang besi sistem analog yang ada pada alat uji kuat tekan beton, data yang diperoleh akan dugunakan untuk menentukan suatu nilai dari hasil pengujian kuat tekan beton. Dengan sistem digital ini diharapkan penguji pada lab uji beton Balai Litbang Sabo Yogyakarta semakin efisien dalam melaksanakan pekerjaannya.
2
1.2 Tujuan dan Manfaat Penelitian
Tujuan dari penelitian ini memanfaatkan teknologi sensor optik untuk membuat suatu sistem digital dari alat uji kuat tekan beton.
Manfaat dari penelitian ini untuk memudahkan pekerjaan para peneliti yang ada di Balai Litbang Sabo untuk mendapatkan data uji kuat tekan beton.
1.3 Batasan Masalah
Agar penelitian ini bisa terarah pada tujuan yang diinginkan, maka perlu batasan-batasan masalah yang sesuai dengan judul tugas akhir ini. Adapun batasan-batasan-batasan-batasan masalah tersebut adalah :
1. Menggunakan sensor optik.
2. Menggunakan microcontroller Arduino UNO. 3. Data ditampilkan menggunakan lcd 16x2.
4. Output berupa nilai kuat tekan dan waktu pengujian.
1.4 Metodologi Penelitian
1. Studi literatur, dengan cara membaca buku atau jurnal-jurnal tentang sensor optik yang berkaitan dengan penelitian tugas akhir ini.
2. Perancangan sistem hardware, tahap ini bertujan untuk mencari model yang optimal dari purwarupa yang akan dibuat setelah mempertimbangkan faktor-faktor permasalahan dan kebutuhan yang sudah di tentukan.
3. Pembuatan sistem hardware, tahap ini adalah proses membuat sistem hardware berdasarkan rancangan yang telah ditentukan.
Gambar 1.1. Diagram Blok Sistem
4. Pengambilan data, tahap ini mengambil data dari hardware yang telah dibuat. Data yang akan diambil berupa perbandingan nilai uji kuat tekan beton secara analog dan digital.
5. Analisis dan kesimpulan hasil percbaan. Tahap ini adalah proses mencocokkan hasil input dengan output, sehingga diperoleh data yang diharapkan.
3
BAB II
DASAR TEORI
2.1. Sensor Optik
Sensor adalah alat untuk mendeteksi atau mengukur suatu besaran fisis berupa variasi mekanis, magnetis, panas, sinar dan kimia dengan diubah menjadi tegangan dan arus listrik [3],[4]. Sensor optik atau cahaya adalah sensor yang mendeteksi perubahan cahaya dari sumber cahaya, pantulan cahaya ataupun bias cahaya yang mengenai benda atau ruangan. Komponen yang sering digunakan dalam pembuatan sensor optik adalah light dependent resistor (LDR), photo diode, dan photo transistor.
Pada sensor optik, proses penyaklaran dilakukan oleh komponen yang bekerja dengan bantuan cahaya, yaitu komponen optik (LDR/photo diode/photo transistor). Sensor optik memiliki sistem kerja seperti sebuah saklar, yaitu menghubungkan dan memutuskan aliran arus listrik. Pada komponen optik proses penyaklarannya dibantu dengan cahaya, yaitu cahaya yang mengenai bagian photo-conductive komponen optik.
Sistem kerja sensor optik dapat dilihat pada gambar 2.1. di bawah ini. Proses switching komponen saklar mekanik digantikan oleh komponen optik photo diode, photo transistor, dan LDR.
Gambar 2.1. Rangkaian Sensor Optik
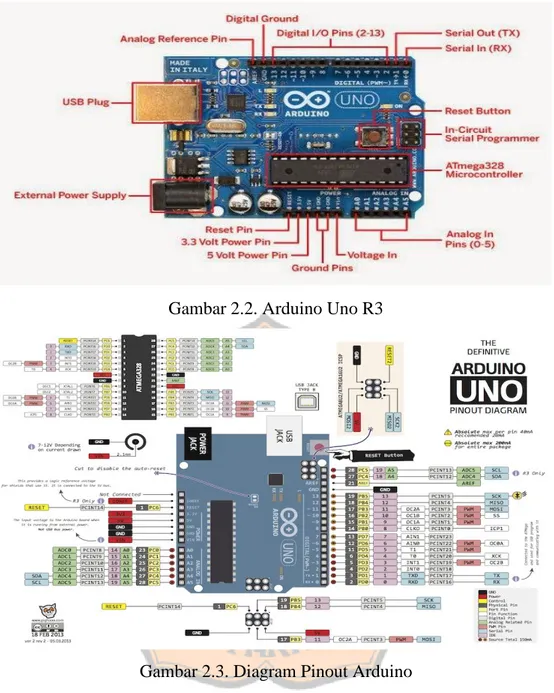
2.2. Arduino Uno
Arduino Uno adalah sebuah papan mengandung mikrokontroller dan sejumlah input/output (I/O) yang memudahkan pemakai untuk menciptakan berbagai proyek elektronika yang dikhususkan untuk menangani tujuan tertentu. Bagian-bagian pada Arduino Uno ditunjukkan pada gambar 2.2. dan 2.3.
4
Gambar 2.2. Arduino Uno R3
Gambar 2.3. Diagram Pinout Arduino
Penjelasan bagian masing-masing seperti berikut :
1. Port USB digunakan untuk menghubungkan Arduino Uno dengan PC atau komputer, menggunakasn kabel USB.
2. Catu daya eksternal digunakan untuk mendapatkan sumber daya listrik untuk Arduino Uno ketika tidak dihubungkan ke komputer.
3. Pin digital Arduino memiliki label 0 sampai dengan 13. Disebut pin digital karena mempunyai isyarat digital, yakni berupa 0 atau 1.
4. Pin analog berarti pin-pin ini mempunyai nilai yang bersifat analog (nilai yang berkesinambungan). Dalam program, nilai setiap pin analog yang berlaku sebagai input berkisar antara 0 sampai dengan 1023.
5
6. Ada 2 pin yang dapat digunakan untuk mendapskan catu daya ke komponen elektronis yang digunakan dalam menangani proyek, misalnya sensor gas, sensor jarak, dan relay. Tegangan yang tersedia adalah 3.3 Volt dan 5 Volt.
Arduino Uno dilengkapi dengan static random-acces memory (SRAM) berukuran 2 KB untuk memegan data, Flash memory berukuran 32 KB, dan erasable programmable read-only memory (EEPROM). SRAM digunakan untuk menampung data atau hasil pemrosesan data selama Arduino bekerja pada suatu sistem. Flash memory digunakan untuk menaruh program yang sudah buat. EEPROM digunakan untuk menaruh program bawaan Arduino Uno dan dapat dimanfaatkan untuk menyimpan data secara permanen.
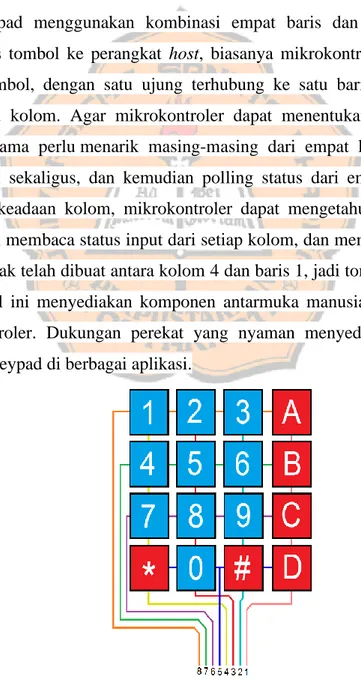
2.3. Keypad 4x4
Matriks keypad menggunakan kombinasi empat baris dan empat kolom untuk memberikan status tombol ke perangkat host, biasanya mikrokontroler. Di bawah setiap tombol adalah tombol, dengan satu ujung terhubung ke satu baris, dan ujung lainnya terhubung ke satu kolom. Agar mikrokontroler dapat menentukan tombol mana yang ditekan, pertama-tama perlu menarik masing-masing dari empat kolom (pin 1-4) baik rendah atau tinggi sekaligus, dan kemudian polling status dari empat baris (pin 5- 8). Tergantung pada keadaan kolom, mikrokontroler dapat mengetahui tombol mana yang ditekan. Kemudian membaca status input dari setiap kolom, dan membaca pin 1 tinggi. Ini berarti bahwa kontak telah dibuat antara kolom 4 dan baris 1, jadi tombol 'A' telah ditekan. Keypad 16 tombol ini menyediakan komponen antarmuka manusia yang berguna untuk proyek mikrokontroler. Dukungan perekat yang nyaman menyediakan cara sederhana untuk memasang keypad di berbagai aplikasi.
6
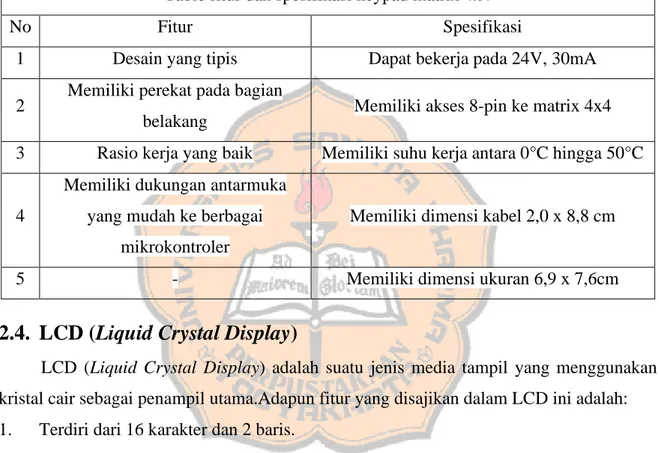
Fitur-fitur yang dimilik keypad matriks antara lain : desain yang tipis, dukungan perekat, rasio kinerja yang sangat baik, antarmuka yang mudah ke mikrokontroler apa pun. Spesifikasi yang dimiliki keypad ini antara lain dapat bekerja pada tegangan 24 VDC, 30 mA. Memiliki akses 8-pin ke matriks 4x4. Suhu kerja antara 32° hingga 122° F (0° hingga 50° C). Keypad ini memiliki dimensi ukuran 2,7 x 3,0 inci (6,9 x 7,6 cm) dan dimensi kabel 0,78 x 3,5 inci (2,0 x 8,8 cm).
Tabel 2.1. Fitur Dan Spesifikasi Keypad Matrix 4x4 Table fitur dan spesifikasi keypad matrix 4x4
No Fitur Spesifikasi
1 Desain yang tipis Dapat bekerja pada 24V, 30mA 2 Memiliki perekat pada bagian
belakang Memiliki akses 8-pin ke matrix 4x4 3 Rasio kerja yang baik Memiliki suhu kerja antara 0°C hingga 50°C
4
Memiliki dukungan antarmuka yang mudah ke berbagai
mikrokontroler
Memiliki dimensi kabel 2,0 x 8,8 cm
5 - Memiliki dimensi ukuran 6,9 x 7,6cm
2.4. LCD (Liquid Crystal Display)
LCD (Liquid Crystal Display) adalah suatu jenis media tampil yang menggunakan kristal cair sebagai penampil utama.Adapun fitur yang disajikan dalam LCD ini adalah: 1. Terdiri dari 16 karakter dan 2 baris.
2. Mempunyai 192 karakter tersimpan. 3. Terdapat karakter generator terprogram. 4. Dapat dialamati dengan mode 4-bit dan 8-bit. 5. Dilengkapi dengan back light.
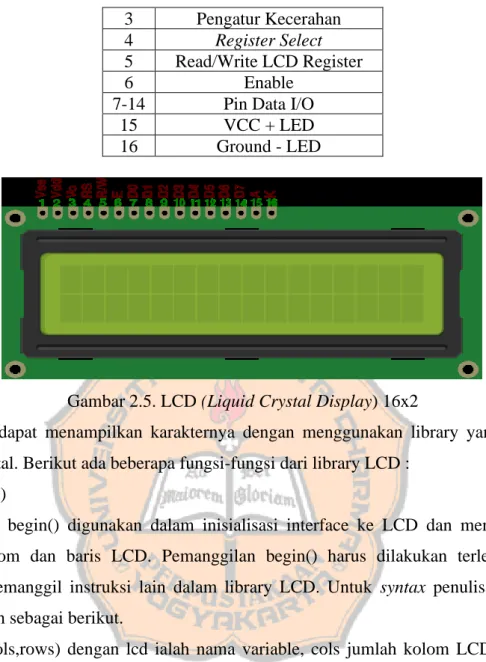
Proses inisialisasi pin arduino yang terhubung ke pin LCD RS, Enable, D4, D5, D6, dan D7, dilakukan dalam baris LiquidCrystal (2, 3, 4, 5, 6, 7), dimana lcd merupakan variable yang dipanggil setiap kali intruksi terkait LCD akan digunakan. Definisi pin LCD 16x2 dapat dilihat pada tabel 2.2. dan gambar 2.5. adalah device LCD.
Tabel 2.2. Spesifikasi Pin LCD Pin Keterangan
1 Ground
7
Tabel 2.2. Spesifikasi Pin LCD (lanjutan) 3 Pengatur Kecerahan
4 Register Select 5 Read/Write LCD Register
6 Enable
7-14 Pin Data I/O
15 VCC + LED
16 Ground - LED
Gambar 2.5. LCD (Liquid Crystal Display) 16x2
LCD dapat menampilkan karakternya dengan menggunakan library yang bernama LiquidCrystal. Berikut ada beberapa fungsi-fungsi dari library LCD :
1. begin()
Untuk begin() digunakan dalam inisialisasi interface ke LCD dan mendefinisikan ukuran kolom dan baris LCD. Pemanggilan begin() harus dilakukan terlebih dahulu sebelum memanggil instruksi lain dalam library LCD. Untuk syntax penulisan instruksi begin() ialah sebagai berikut.
lcd.begin(cols,rows) dengan lcd ialah nama variable, cols jumlah kolom LCD, dan rows jumlah baris LCD.
2. setCursor()
Instruksi ini digunakan untuk memposisikan cursor awal pesan text di LCD. Penulisan syntax setCursor() ialah sebagai berikut.
lcd.setCursor(col,row) dengan lcd ialah nama variable, col kolom LCD, dan row baris LCD.
3. print()
Sesuai dengan namanya, instruksi print() ini digunakan untuk mencetak, menampilkan pesan text di LCD. Penulisan syntax print() ialah sebagai berikut.lcd.print(data) dengan lcd ialah nama variable, data ialah pesan yang ingin ditampilkan.
8
2.5. Optik Mouse
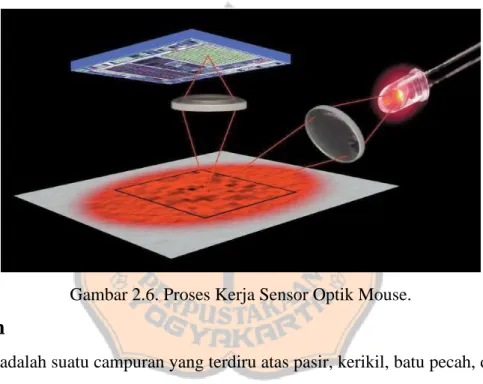
Sensor optik mouse bekerja saat lampu led merah menyala, cahaya akan direfleksikan menggunkan lensa menuju bagian bawah mouse sehingga apabila ada permukaan yang terkena cahaya merah maka lensa yang berada tepat di bawah sensor akan mendeteksi bahwa ada gambar yang tertangkap. Apabila terjadi perubahan gambar maka sensor akan mendeteksi suatu pergerakan. Apabila terjadi perubahan gambar pada permukaan yang bersinggungan dengann bagian bawah mouse maka sensor optik mouse akan menerjemahkan perubahan gambar menjadi suatu pergerakan yang menunjukkan nilai dari koordinat tertentu. Koordinat tersebut meruakan koordinat dari sumbu X dan sumbu Y. gambar proses kerja sensor optik mouse dapat dilihat pada gambar 2.6.
Gambar 2.6. Proses Kerja Sensor Optik Mouse.
2.6. Beton
Beton adalah suatu campuran yang terdiru atas pasir, kerikil, batu pecah, dan agregat-agregat lain yang dicampur menjadi satu dengan suatu pasta yang terbuat dari semen dan air membentuk suatu massa mirip batuan. Terkadang satu atau lebih bahan aditif ditambahkan untuk menghasilkan beton dengan karakteristik tertentu, seperti kemudahan pengerjaan (workability), durabilitas, dan waktu pengerasan [5].
Kekuatan, keawetan, dan sifat beton tergantung dari nilai perbandingan bahan dasar beton, sifat bahan dasar, cara pengadukan, pengerjaan, penuangan, pemadatan serta perawatan selama proses pengerasan. Untuk membuat beton yang baik diperlukan peprhitungan untuk mendapatkan campuran beton yang baik sehingga hasilnya juga baik. Kekuatan dan kekerasan massa beton perlu diperhatikan untuk mendapatkan kuat beton yang diperlukan karena semakin keras dan padat massa penysunnya maka semakin tinggi kekuatan dan durability suatu beton.
9
Balai Litbang Sabo menggunakan beberapa bentuk beton dalam pengujian, yaitu kubus dan silinder. Gambar dari beton kubus dan silinder dapat dilihat pada gambar 2.7 dan 2.8 berikut ini.
Gambar 2.7. Beton Kubus
Gambar 2.8. Beton Silinder
2.7. IDE Arduino
IDE (Integrated Development Environment) adalah sebuah perangkat lunak yang digunakan untuk mengembangkan aplikasi mikrokontroler mulai dari menuliskan source program, kompilasi, upload hasil kompilasi dan uji coba secara terminal serial. IDE arduino dapat dilihat pada gambar 2.9. berikut ini.
10
Gambar 2.9. IDE Arduino
Pada IDE Arduino terdapat beberapa icon menu dengan fungsi sebagai berikut :
1. Icon menu verify yang bergambar ceklis berfungsi untuk mengecek program yang ditulis apakah ada yang salah atau error.
2. Icon menu upload yang bergambar panah ke arah kanan berfungsi untuk memuat atau transfer program yang dibuat di software arduino ke hardware arduino.
3. Icon menu New yang bergambar sehelai kertas berfungsi untuk membuat halaman baru dalam pemrograman.
4. Icon menu Open yang bergambar panah ke arah atas berfungsi untuk membuka program yang disimpan atau membuka program yang sudah dibuat dari pabrikan software arduino.
5. Icon menu Save yang bergambar panah ke arah bawah berfungsi untuk menyimpan program yang telah dibuat atau dimodifikasi.
6. Icon menu Serial Monitor yang bergambar kaca pembesar berfungsi untuk mengirim atau menampilkan serial komunikasi data saat dikirim dari hardware arduino.
11
BAB III
RANCANGAN PENELITIAN
3.1 Proses Kerja Alat
Pada subbab ini akan dijelaskan proses kerja alat dari Alat Uji Kuat Tekan Beton Yang ada di Balai Litbang Sabo dan Sistem digital yang akan dibuat.
3.1.1. Proses Kerja Alat Uji Kuat Tekan Beton
Balai Litbang Sabo memiliki sebuah alat Uji Kuat Tekan Beton model lama, sistem yang digunakan masih menggunakan sistem analog. Cara kerja dari alat uji kuat tekan beton yang ada di Balai Litbang sabo adalah sebagai berikut ini:
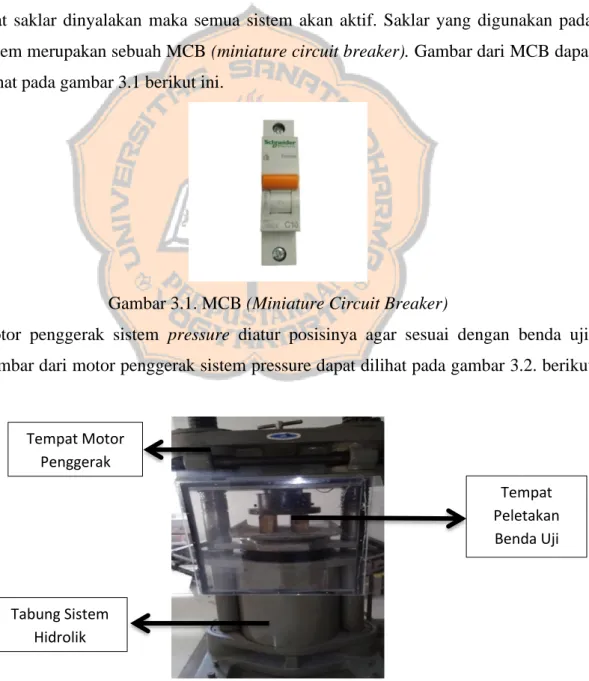
1. Saat saklar dinyalakan maka semua sistem akan aktif. Saklar yang digunakan pada sistem merupakan sebuah MCB (miniature circuit breaker). Gambar dari MCB dapat dilhat pada gambar 3.1 berikut ini.
Gambar 3.1. MCB (Miniature Circuit Breaker)
2. Motor penggerak sistem pressure diatur posisinya agar sesuai dengan benda uji. Gambar dari motor penggerak sistem pressure dapat dilihat pada gambar 3.2. berikut ini.
Gambar 3.2. Sistem Pressure
Tempat Motor Penggerak Tempat Peletakan Benda Uji Tabung Sistem Hidrolik
12
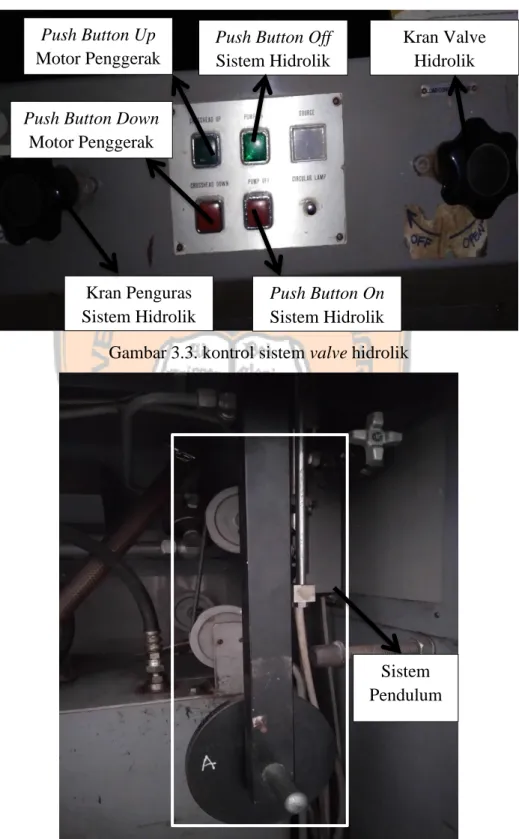
3. Sistem valve hidrolik dinyalakan.
4. Kran valve hidrolik dibuka secara perlahan, saat minyak mengalir menuju sistem press, maka sistem pendulum pada alat uji kuat tekan beton akan bergerak. Gambar kontrol sistem valve dan sistem pendulum dapat dilihat pada gambar 3.3. dan 3.4. berikut ini.
Gambar 3.3. kontrol sistem valve hidrolik
Gambar 3.4. Sistem Pendulum Push Button On Sistem Hidrolik Push Button Off
Sistem Hidrolik Kran Valve Hidrolik Kran Penguras Sistem Hidrolik Push Button Up Motor Penggerak
Push Button Down Motor Penggerak
Sistem Pendulum
13
5. Gerakan dari pendulum akan menggeser batang besi pada sistem penampil yang ada pada alat uji kuat tekan beton.
Gambar 3.5. Sistem Pendulum dan Batang Besi
6. Saat pendulum bergerak maka batang besi akan bergeser, saat bergesr batang besi akan memutar roda pada sistem penampil kemudian,
7. Jarum penunjuk nilai uji kuat tekan akan bergerak, pergerakan jarum menunjukkan nilai dari pengujian suatu kuat tekan beton. Gambar roda dan batang besi sistem penampil terlihat pada gambar 3.6.
Gambar 3.6. Roda Dan Batang Besi Sitem Penampil Batang Besi Sistem Pendulum Batang Besi Roda
14
Gambar 3.7. Gambar Penampil Nilai Kuat Tekan Pada Alat Uji Kuat Tekan Beton 8. Saat batang besi bergerak maka roda akan berputar perputaran roda akan memutar
jarum yang terlihat pada gambar 3.7.
9. Setelah beton diuji sesuai dengan kebutuhan maka sistem valve dimatikan. 10. Kran valve hidrolik ditutup.
11. Setelah ditutup kran valve penguras dibuka kembali agar minyak yang ada dalam sistem press kembali menuju tangki penyimpanan minyak.
3.1.2. Proses Kerja Sistem Digital Alat Uji Kuat Tekan Beton
Sistem digital pada alat uji kuat tekan beton, memanfaatkan teknologi sensor optik dari mouse. Sensor optik mouse akan dipasang bersinggungan dengan batang besi yang bergerak untuk menunjukkan nilai dari pengujian beton. Saat sistem alat uji kuat tekan beton bekerja untuk melakukan pengujian kuat tekan beton maka sensor optik mouse akan melakukan pembacaan data dari pergeseran batang besi. Data yang diperoleh akan dikirimkan menuju arduino melalui komunikasi serial. Arduino bertugas untuk menerima dan mengolah data dari sensor optik menjadi nilai keluaran pengujian kuat tekan beton, nilai yang diperoleh akan ditampilkan pada LCD 16x2.
Nilai keluaran yang ditampilkan akan bergantung pada penguji yang ada di Balai Litbang Sabo jika penguji menggunakan selektor yang bernilai 0 sampai dengan 50.000KgF maka nilai pengujian memiliki akurasi sebesar 50KgF per Div, untuk selektor yang bernilai 0 sampai dengan 100.000KgF maka nilai pengujian memiliki akurasi sebesar 100KgF per Div, untuk selektor yang bernilai 0 sampai dengan 150.000KgF maka nilai pengujian memiliki akurasi sebesar 150KgF per div, dan untuk selektor yang bernilai 0 sampai dengan 200.000KgF maka nilai pengujian memiliki akurasi sebesar 200KgF per Div.
Jarum Penunjuk Nilai Kuat Tekan
15
3.2
Perancangan Perangkat Keras
Pada perancangan perangat keras ini, gambar dari alat yang akan dibuat dapat dilihat pada gambar 3.8. dan gambar 3.9. di bawah ini.
Gambar 3.8. Gambar Sistem Penampil Alat Uji Kuat Tekan Beton
Gambar 3.9. Skema Peletakan Sensor Pada Sistem Penampil
Mouse akan dihubungkan pada Arduino UNO melalui Komunikasi Serial. Arduino berfungsi untuk melakukan pengolahan data serta mengirim data untuk ditampilkan pada LCD 16x2. Keypad 4x4 berfungsi, memberi perintah arduino untuk melakukan pengolahan data sesuai dengan kebutuhan pengujian karena output memiliki empat nilai keluaran yaitu: 0 sampai dengan 50.000KgF, 0 sampai dengan 100.000KgF, 0 sampai dengan 150.000KgF, dan 0 sampai dengan 200.000KgF. Gambar blok perancangan perangkat keras dapat dilihat pada gambar 3.10 di bawah ini.
Tempat Peletakan Mouse Penyangga Tempat Mouse Batang Besi Roda dan As Roda Baut
16
Gambar 3.10. blok diagram perancangan hardware
Pada gambar 3.8. dapat dilihat pada sistem penampil terdapat suatu batang besi yang posisinya horizontal. Batang besi ini berfungsi untuk menggerakkan roda besi yang possisinyya tepat berada dibawahnya. Roda besi ini berfungsi untuk memutar jarum yang menunjukkan nilai dari pengujian kuat terkan suatu suatu beton.
Pada gambar 3.9. dapat dilihat bahwa posisi sensor akan di pasang bersinggungan dengan batang besi yang bergerak secara horizontal sehingga pergeseran dari batang besi dapat dibaca oleh sensor optik mouse. Pada peracangan hardware ini mouse yang digunakan adalah mouse Logitech Tipe B100 dengan dimensi lebar 6,5 cm dan panjang 11,7 cm mouse akan diletakkan pada sebuah kotak yang tebuat dari acrylic sebagai tempat meletakkan sensor dan akan dihubungkan menuju baut yang ada, sehingga posisi sensor tidak mengalami perubahan.
Pada sistem ini nilai outputnya akan ditampikan melalui LCD 16x2 yang akan diprogram oleh arduino UNO. Untuk mengatur kecerahan LCD digunakan potensiometer dengan nilai resistansi 100KΩ. Pin Digital Arduino UNO yaitu pin nomor 2,3,4,5 terhubung dengan pin data LCD nomor 7,6,5,4. Pin A0 Arduino UNO terhubung dengan kaki nomor 2 pada potensio, kaki nomor 1 potensio terhubung dengan VCC, kaki nomor 3 potensio terhubung dengan ground dan pin VSS (ground, pin nomor 1) LCD. Pin digital Arduino nomor 12 terhubung dengan pin RS (Register Select, pin nomor 4) pada LCD dan pin digital Arduino nomor 11 terhubung dengan Pin E (Enable, pin nomor 6) pada LCD. Pin kaki pada keypad 4x4 akan dihubungkan pada arduino dengan konfigurasi pin keypad nomor 1, 2, 3, dan 4 dihubungkan dengan pin digital arduino nomor 3, 4, 5, dan 6 sedangkan pin A, B, C, dan D pada keypad dihubungkan pada pin digital arduino nomor 10, 11, 12, dan 13. Gambar rangkaian elektronis pada perancangan sistem ini dapat dilihat pada gambar 3.11.
Gambar 3.11. Rangkaian Elektronis
3.3 Perancangan Perangkat Lunak
Pada tahap perancangan perangkat lunak ini mengunakan software IDE Arduino untuk membaca dan mengolah data yang diterima dari sensor optik. Data yang diperoleh dari sensor optik dibaca dan dipetakan menggunakan software IDE Arduino. Pengubahan data dilakukan berdasarkan kebutuhan pengujian yang akan dilakukan oleh pihak Balai Litbang Sabo Yogyakarta Pada alat uji kuat tekan beton terdapat 4 aturan Pembebana yaitu : 0 – 50000KgF, 0 - 100000KgF, 0 – 150000KgF, dan 0 - 200000KgF sehingga pada pengolahan data terdapat 4 selektor untuk mendapatkan 4 nilai output yang dibutuhkan saat pengujian kuat tekan beton. Flowchart perancangan perangkat lunak (software) ada pada gambar 3.12. berikut ini.
Gambar 3.12. Flowchart Perangkat Lunak
Saat sistem diaktifkan maka sensor optik dari mouse akan membaca nilai dari pergeseran batang besi, kemudian nilai tersebut akan diubah sesuai dengan selektor yang dipilih, apabila selektor 1 yang dipilih maka nilai keluaran yang ditampillkan antara 0 - 50.000KgF dan data yang ditampilkan akan memiliki akurasi sebesar 50KgF setiap div, jika selektor 1 tidak di pilih maka program akan melanjukan eksekusi ke selektor 2. Apabila selektor 2 yang dipilih maka nilai keluaran yang ditampillkan antara 0
-100.000KgF dan data yang ditampilkan akan memiliki akurasi sebesar 100KgF setiap div, jika selektor 2 tidak di pilih maka program akan melanjutkan eksekusi ke selektor 3. Apabila selektor 3 yang dipilih maka nilai keluaran yang ditampillkan antara 0 - 150.000KgF dan data yang ditampilkan akan memiliki akurasi sebesar 150KgF setiap div, jika selektor 3 tidak dipilih maka program akan melanjutkan eksekusi ke selektor 4. Selektor 4 akan menghasilkan nilai antara 200.000KgF dan akurasi data sebesar 200KgF setiap div.
Apabila dari keempat selektor tidak dipilih maka program tidak akan melakukan eksekusi apapun sehingga program tidak mengolah data yang diterima. Jika ada selektor yang dipilih program akan melakukan eksekusi sesuai dengan selektor yang dipilih, kemudian program akan melakukan mapping data sesuai dengan selektor yang dipilih. Setelah melakukan mapping data program akan mengolah data menjadi nilai output. Nilai output akan dikirim menuju LCD 16x2 agar nilai yang diperoleh dapat dilihat melalui LCD.
20
BAB IV
HASIL DAN PEMBAHASAN
Pada bab ini akan dijelaskan hasil implementasi alat berupa perangkat keras (hardware) dan perangkat lunak (software).
4.1. Perangkat Keras (Hardware)
Perangkat keras pada sistem digital alat uji kuat tekan beton terdiri dari USB Mouse, USB Host Shield, mikrokontroler Arduino Uno, LCD, keypad dan kabel jumper. Gambar dari perancangan perangkat keras dapat dilihat pada gambar 4.1 dan 4.2.
Gambar 4.1. Kotak Simulasi Digitalisai Alat Uji Kuat Tekan Beton Dari Atas.
Gambar 4.2. Kotak Simulasi Digitalisai Alat Uji Kuat Tekan Beton Dari Samping. Kotak simulasi pada gambar 4.1 dan 4.2 memiliki dimensi panjang 34cm, lebar 7cm, dan tinggi 11cm. pada simulasi ini pergerakan mouse diatur secara manua menggunakan tangan. Tombol keypad yang digunakan adalah tombol angka 1,4, dan 7 untuk start, stop, dan reset sedangkan tombol angka 2,5,8, dan 0 digunakan untuk menampilkan menu 1,2,3, dan 4. Menu 1 merupakan selektor 1 yang memiliki nilai output sebesar 0-50.000 KgF, menu 2 untuk selektor 2 dengan nilai output 0-100.000 KgF, menu 3 untuk selektor 3 dengan nilai output sebesar 150.000 KgF dan menu 4 untuk selektor 4 nilai outputnya 0-200.000KgF.
4.2. Perangkat Lunak (Software)
Pada bagian ini akan dijelaskan mengenai program yang dibuat meliputi inisiaisi library, inisilisi input output, pembaacaan input dan perintah ke output.
4.2.1.Inisialisasi Library
Inisialisasi library pada program digitalisasi alat uji kuat tekan beton berisi tentang definisi dari fungsi library dan variabel yang digunakan. Inisialisasi meliputi setup USB Host Shield, komunikasi Serial, Setup LCD. Listing program inisiasi library dapat dilihat pada gambar 4.4. berikut ini.
Gambar 4.3. Inisiasi Library
Pada gambar 4.3. dapat dilihat beberapa library yang digunakan seperti hidboot.h, usbhub.h, SPI.h, Keypad.h, dan LiquidCrystal.h. Setiap library memiliki fungsi masing-masing hidboot.h digunakan untuk membaca human interface device (HID) pada perancangan ini HID yang digunakan adalah mouse. Usbhub.h berfungsi untuk menghubungkan port female USB pada USB Host Shield dengan port male USB pada mouse. SPI.h adalah serial peripheral interface (SPI) yang digunakan untuk mengatur jalur komunikasi serial mikrokontroler arduino dengan perangkat yang digunakan yaitu mouse. Keypad.h berfungsi untuk menghubungkan matriks keypad 4x4 dengan arduino. LiquidCrystal.h digunakan untuk mengatur karakter yang ditampilkan pada Liquid Crystal Display (LCD) 16x2.
4.2.2.Inisialisi Input/Output
Inisialisasi input/output pada program digitalisasi alat uji kuat tekan beton berisi tentang definisi dari fungsi input dan output yang digunakan. Listing program inisiasi input/output dapat dilihat pada gambar 4.5. dan 4.6. berikut ini.
Gambar 4.4. Program Inisiasi Input/Output (1)
Pada gambar 4.4. dan 4.5. dapat dilihat data dari arduino dikirim menuju LCD melalui pin analog A0,A1,A2,A3,A4 dan A5. Pin A0 dihubungkan dengan pin RS pada LCD, pin A1 dihubungkan dengan pin E (enable) LCD. Untuk pin A2 sampai dengan Pin A5 dihubungkan dengan pin D4 sampai dengan pin D7 LCD.
Const byte rows dan cols memberikan nilai tetap yaitu keypad menggunakan 4 baris dan 4 kolom, nilai ini hanya dapat dibaca selama program dijalankan. Char keys rows dan cols mendeklarasikan karakter yang digunakan pada keypad. Byte rowPins dan colPins mendeklarasikan bahwa pin yang digunakan keypad pada arduino adalah pin digital 6,7,8, dan 9 untuk kolom sedangkan pin digital 2,3,4, dan 5 digunakan untuk baris.
4.2.3.Inisialisasi Bagian Mouse
Inisialisasi bagian pada program digitalisasi alat uji kuat tekan beton berisi tentang definisi dari fungsi bagian mouse. Definisi dari fungi mouse dalam digitalisasi alat uji kuat tekan beton dapat dilihat pada gambar 4.7. berikut ini.
Gambar 4.6. Inisiasi Bagian Mouse
Pada gambar 4.6 ditunjukkan inisialisasi yang ada pada mouse pada penelitian ini yang digunakan adalah pergerakan dari mouse. Void OnMouseMove berfungsi untuk membaca pergerakan mouse menuju koordinat X dan Y. Saat mouse digerakkan maka nilai dari koordinat X dan Y akan dibaca. Void MouseRptParser digunakan untuk memanggil data yang diperoleh dari mouse sehingga nilai dari pergerakan mouse menuju koordinat X dan Y dapat ditampilkan. MOUSEINFO *mi berisi data-data dari objek mouse, pada penelitian ini data-data yang digunakan merupakan koordinat mouse.
4.2.4.Pembacaan Input dan Perintah Ke Output
Listing program pembacaan input dan perintah ke output dapat dilihat pada gambar 4.7. dan 4.8. berikut ini.
Gambar 4.7. Pembacaan Input
Pada gambar 4.7. nilai b adalah 1250, nilai tersebut didapatkan setelah melakukan pengujian terhadap output sensor dengan jarak pergeseran sejauh 11cm, percobaan dilakukan sebanyak lima kali agar mendapat nilai yang akurat. Data dari percoban pengujian sensor dapat dilihat pada tabel 4.1. berikut ini.
Tabel 4.1. Data Pengujian Sensor Dengan Jarak Pergeseran 11cm. Percobaan ke Nilai Output Sensor
1 1250
2 1250
3 1250
4 1250
5 1250
Pada gambar 4.7. data dari objek mouse diubah menjadi koordinat X. jika data dari objek mouse adalah 0 maka data dari integer b akan mengalami kenaikan. Nilai dari integer b adalah 1250 setelah dilakukan pengujian terhadap output sensor dengan jarak pergeseran 11cm jika nilai kenaikan mencapai 1250 maka nilai integer b akan tetap 1250, artinya nilai dari koordinat X yang ditampikan adalah 1 sampai dengan 1250 titik pergeseran. Pada gambar 4.8. Nilai pergeseran dari Koordinat X diubah menjadi nilai output dari alat uji kuat tekan beton. Jika selektor dipilih maka nilai dari koordinat X akan dikalikan dengan nilai selektor yang digunakan kemudian dibagi lagi dengan koordinat mouse sehingga setiap pergeseran mouse akan menghasilkan nilai tertentu.
4.3. Hasil Pengujian Alat
Pada bagian ini akan dijelaskan tetang nilai output sensor, data output dari pengujian, perhitungan data output dengan rumus, dan error data.
4.3.1. Hasil pengujian alat pada selektor 1 dengan nilai output 0-50000KgF
Hasil pengujian alat dapat dilihat pada tabel berikut ini.
Tabel 4.2. Data Percobaan selektor 1 dengan nilai output 0 sampai 50000KgF Selektor 1
jarak Jar
ak
Data Percobaan
Percobaan 1 Percobaan 2 Percobaan 3 Percobaan 4 Percobaan 5 Rata-Rata 1 4560KgF 4560KgF 4560KgF 4560KgF 4560KgF 4560KgF 2 9120KgF 9120KgF 9120KgF 9120KgF 9120KgF 9120KgF 3 13640KgF 13640KgF 13640KgF 13640KgF 13640KgF 13640KgF 4 18200KgF 18200KgF 18200KgF 18200KgF 18200KgF 18200KgF 5 22760KgF 22760KgF 22760KgF 22760KgF 22760KgF 22760KgF 6 27280KgF 27280KgF 27280KgF 27280KgF 27280KgF 27280KgF 7 31840KgF 31840KgF 31840KgF 31840KgF 31840KgF 31840KgF 8 36400KgF 36400KgF 36400KgF 36400KgF 36400KgF 36400KgF 9 40920KgF 40920KgF 40920KgF 40920KgF 40920KgF 40920KgF 10 45480KgF 45480KgF 45480KgF 45480KgF 45480KgF 45480KgF 11 50000KgF 50000KgF 50000KgF 50000KgF 50000KgF 50000KgF
Dari tabel 4.2 setelah dilakukan percobaan sebanyak lima kali untuk nilai output 0 sampai 50000KgF diperoleh data rata-rata untuk jarak pergeseran 1cm sebesar 4560KgF, 2cm sebesar 9120KgF, 3cm sebesar 13640KgF, 4cm sebesar 18200KgF, 5cm sebesar
22760KgF, 6cm sebesar 27280KgF, 7cm sebesar 31840KgF, 8cm sebesar 36400KgF, 9cm sebesar 40920KgF, 10cm sebesar 45480KgF, 11cm sebesar 50000KgF. Nilai rata-rata percobaan diperoleh dari rumus berikut:
(𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑛 1) + (𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑛 2) + (𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑎𝑛 3) + (𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑛 4) + (𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑎𝑛 5)
𝑡𝑜𝑡𝑎𝑙 𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑎𝑛 𝑦𝑎𝑛𝑔 𝑑𝑖𝑙𝑎𝑘𝑢𝑘𝑎𝑛
Sehingga dari percoban mengunakan selektor 1 dengan nila output 0 sampai 50000KgF diperoleh data :
Pergeseran 1cm = 4560KgF
Nilai rata-rata untuk pergeseran 1cm adalah sebagai berikut :
4560𝐾𝑔𝐹 + 4560𝐾𝑔𝐹 + 4560𝐾𝑔𝐹 + 4560𝐾𝑔𝐹 + 4560𝐾𝑔𝐹
5 = 4560𝐾𝑔𝐹
Pada percoban dengan selektor 1 dan jarak pergerseran 1cm nilai output sensor, nilai data perhitungan, nilai data percobaan dan error data dapat dihitung dengan rumus berikut ini :
1. Nilai dari output sensor
Pada gambar 4.7. dan tabel 4.1 telah dijelaskan bahwa output sensor untuk pergeseran 11cm adalah 1250 maka untuk pergeseran 1cm nilai output sensornya :
( 𝑛𝑖𝑙𝑎𝑖 𝑚𝑎𝑘𝑠𝑖𝑚𝑎𝑙 𝑠𝑒𝑛𝑠𝑜𝑟
𝑗𝑎𝑟𝑎𝑘 𝑚𝑎𝑘𝑠𝑖𝑚𝑎𝑙 𝑝𝑒𝑟𝑔𝑒𝑠𝑒𝑟𝑎𝑛) × 𝑗𝑎𝑟𝑎𝑘 𝑦𝑎𝑛𝑔 𝑑𝑖𝑔𝑢𝑛𝑎𝑘𝑎𝑛 = 𝑛𝑖𝑙𝑎𝑖 𝑠𝑒𝑛𝑠𝑜𝑟 (1250
11 ) × 1 = 113,63 2. Nilai data perhitungan
Karena nilai sensor pada jarak pergeseran 1cm adalah 113,636363 maka nilai data perhitungannya adalah :
𝑛𝑖𝑙𝑎𝑖 𝑟𝑒𝑎𝑙 𝑠𝑒𝑛𝑠𝑜𝑟 × 𝑛𝑖𝑙𝑎𝑖 𝑜𝑢𝑡𝑝𝑢𝑡 𝑚𝑎𝑘𝑠𝑖𝑚𝑎𝑙
𝑛𝑖𝑙𝑎𝑖 𝑠𝑒𝑛𝑠𝑜𝑟 𝑚𝑎𝑘𝑠𝑖𝑚𝑎𝑙 = 𝑛𝑖𝑙𝑎𝑖 𝑑𝑎𝑡𝑎 𝑟𝑒𝑎𝑙 113,63 × 50000𝐾𝑔𝐹
1250 = 4545,45𝐾𝑔𝐹
Sehingga nilai data perhitungan pada percobaan selektor 1 output 0-50000KgF dengan jarak pergeseran 1cm adalah 4545,45KgF.
3. Nilai data percobaan
Karena sensor tidak dapat membaca nilai output sensor sebesar 113,63 maka pada percobaan nilai yang terbaca oleh sensor adalah 114.Sehingga nilai dari data percobaan adalah 4560KgF dan diperoleh dari rumus berikut ini
𝑛𝑖𝑙𝑎𝑖 𝑠𝑒𝑛𝑠𝑜𝑟 𝑡𝑒𝑟𝑏𝑎𝑐𝑎 × 𝑛𝑖𝑙𝑎𝑖 𝑜𝑢𝑡𝑝𝑢𝑡 𝑚𝑎𝑘𝑠𝑖𝑚𝑎𝑙
𝑛𝑖𝑙𝑎𝑖 𝑠𝑒𝑛𝑠𝑜𝑟 𝑚𝑎𝑘𝑠𝑖𝑚𝑎𝑙 = 𝑛𝑖𝑙𝑎𝑖 𝑑𝑎𝑡𝑎 𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑎𝑛 114 × 50000𝐾𝑔𝐹
1250 = 4560𝐾𝑔𝐹 4. Nilai error
Karena nilai percobaan yang diperoleh berbeda dari nilai real maka nilai error dapat dihitung dengan rumus berikut :
𝑛𝑖𝑙𝑎𝑖 𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑎𝑛 − 𝑛𝑖𝑙𝑎𝑖 𝑟𝑒𝑎𝑙
𝑛𝑖𝑙𝑎𝑖 𝑟𝑒𝑎𝑙 × 100% = %𝑒𝑟𝑟𝑜𝑟 Jadi nila errornya adalah :
4560 − 4545,45
4545,45 × 100% = 0,32% Sehingga nilai error pada percoban ini adalah 0,32%.
Tabel 4.3. Nilai perhitungan data sensor dan nilai data sensor yang terbaca Jarak pergeseran Data perhitungan sensor Data sensor yang terbaca
1 113,63 114 2 227,27 228 3 340,90 341 4 454,54 455 5 568,18 569 6 681,81 682 7 795,45 796 8 909,09 910 9 1022,72 1023 10 1136,36 1137 11 1250 1250
Pada tabel 4.3. pada setiap pergeseran data dari perhitungan sensor dan data sensor yang terbaca memiliki nilai yang berbeda sehingga pada percobaan ini nilai output dari perhitungan dan percobaan memiliki hasil yang berbeda. Nilai dari output data percobaan, data perhitungan dan error data dari selektor 1 dapat dilihat pada tabel 4.4. berikut ini.
Tabel 4.4. Data percobaan, data perhitungan dan error data pada selektor 1 Jarak pergeseran Data percobaan Data perhitungan Error data
1 4560 KgF 4545,45KgF 0,32%
Tabel 4.4. Data percobaan, data perhitungan dan error data pada selektor 1 (lanjutan) Jarak pergeseran Data percobaan Data perhitungan Error data
3 13640 KgF 13636,36KgF 0,0267% 4 18200 KgF 18181,81KgF 0,1% 5 22760 KgF 22727,27KgF 0,144% 6 27280 KgF 27272,72KgF 0,027% 7 31840 KgF 31818,18KgF 0,07% 8 36400 KgF 36363,63KgF 0,1% 9 40920 KgF 40909,09KgF 0,027% 10 45480 KgF 45454,54KgF 0,056% 11 50000 KgF 50000 KgF 0%
Pada tabel 4.4. ditunjukkan bahwa nilai output data percobaan dengan data perhitungan pada selektor 1 memiliki nilai yang berbeda. Setiap jarak pergeseran memiliki rentang nilai error 0% sampai dengan 0,32%.
Gambar 4.9. Grafik Data Pengujian dan Data Perhitungan Pada Selektor 1
Pada grafik yang ditunjukkan gambar 4.9. dapat dilihat bahwa perbedaan output dari perhitungan dan percoban memiliki perbedan nilai yang sangat kecil. Pada percobaan menggunakan selektor 1 perbedaan output perhitungan dengan percobaan memiliki rentang nilai 0KgF sampai dengan 29,09KgF, sehingga grafik menunjukkan titik yang bersinggungan. Pada percobaan ini nilai error yang dihasilkan memiliki rentang persentase antara 0% sampai dengan 0,32%.
0 10000 20000 30000 40000 50000 60000 1 2 3 4 5 6 7 8 9 1 0 1 1 N IL A I O UT PUT ( KG F) JARAK PERGESERAN (CM)
4.3.2. Hasil pengujian alat pada seleketor 2 dengan nilai output 0-100000KgF
Hasil pengujian alat dapat dilihat pada tabel berikut ini.
Tabel 4.5. Data Percobaan selektor 2 dengan nilai output 0 sampai 100000KgF Selektor 2
jarak Jar
ak
Data Percobaan
Percobaan 1 Percobaan 2 Percobaan 3 Percobaan 4 Percobaan 5 Rata-Rata 1 9120KgF 9120KgF 9120KgF 9120KgF 9120KgF 9120KgF 2 18240KgF 18240KgF 18240KgF 18240KgF 18240KgF 18240KgF 3 27280KgF 27280KgF 27280KgF 27280KgF 27280KgF 27280KgF 4 36400KgF 36400KgF 36400KgF 36400KgF 36400KgF 36400KgF 5 45520KgF 45520KgF 45520KgF 45520KgF 45520KgF 45520KgF 6 54560KgF 54560KgF 54560KgF 54560KgF 54560KgF 54560KgF 7 63680KgF 63680KgF 63680KgF 63680KgF 63680KgF 63680KgF 8 72800KgF 72800KgF 72800KgF 72800KgF 72800KgF 72800KgF 9 81840KgF 81840KgF 81840KgF 81840KgF 81840KgF 81840KgF 10 90960KgF 90960KgF 90960KgF 90960KgF 90960KgF 90960KgF 11 100000KgF 100000KgF 100000KgF 100000KgF 100000KgF 100000KgF
Dari tabel 4.5. setelah dilakukan percobaan sebanyak lima kali untuk nilai output 0 sampai 100000KgF diperoleh data rata-rata untuk jarak pergeseran 1cm sebesar 9120KgF, 2cm sebesar 18240KgF, 3cm sebesar 27280KgF, 4cm sebesar 36400KgF, 5cm sebesar 45520KgF, 6cm sebesar 54560KgF, 7cm sebesar 63680KgF, 8cm sebesar 72800KgF, 9cm sebesar 81840KgF, 10cm sebesar 90960KgF, 11cm sebesar 100000KgF. Nilai rata-rata percobaan diperoleh dari rumus berikut:
(𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑛 1) + (𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑛 2) + (𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑎𝑛 3) + (𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑛 4) + (𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑎𝑛 5) 𝑡𝑜𝑡𝑎𝑙 𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑎𝑛 𝑦𝑎𝑛𝑔 𝑑𝑖𝑙𝑎𝑘𝑢𝑘𝑎𝑛
Sehingga dari percoban mengunakan selektor 2 dengan nila output 0 sampai 100000KgF diperoleh data :
Pergeseran 1cm = 9120KgF
Nilai rata-rata untuk pergeseran 1cm adalah sebagai berikut :
9120𝐾𝑔𝐹 + 9120𝐾𝑔𝐹 + 9120𝐾𝑔𝐹 + 9120𝐾𝑔𝐹 + 9120𝐾𝑔𝐹
Pada percoban dengan selektor 2 dan jarak pergerseran 1cm nilai output sensor, nilai data yang sebenarnya, nilai data percobaan dan error data dapat dihitung dengan rumus berikut ini :
1. Nilai dari output sensor
Pada gambar 4.7. dan tabel 4.1 telah dijelaskan bahwa output sensor untuk pergeseran 11cm adalah 1250 maka untuk pergeseran 1cm nilai output sensornya :
( 𝑛𝑖𝑙𝑎𝑖 𝑚𝑎𝑘𝑠𝑖𝑚𝑎𝑙 𝑠𝑒𝑛𝑠𝑜𝑟
𝑗𝑎𝑟𝑎𝑘 𝑚𝑎𝑘𝑠𝑖𝑚𝑎𝑙 𝑝𝑒𝑟𝑔𝑒𝑠𝑒𝑟𝑎𝑛) × 𝑗𝑎𝑟𝑎𝑘 𝑦𝑎𝑛𝑔 𝑑𝑖𝑔𝑢𝑛𝑎𝑘𝑎𝑛 = 𝑛𝑖𝑙𝑎𝑖 𝑠𝑒𝑛𝑠𝑜𝑟 (1250
11 ) × 1 = 113,63 2. Nilai data perhitungan
Karena nilai sensor pada jarak pergeseran 1cm adalah 113,63 maka nilai data perhitungannya adalah :
𝑛𝑖𝑙𝑎𝑖 𝑟𝑒𝑎𝑙 𝑠𝑒𝑛𝑠𝑜𝑟 × 𝑛𝑖𝑙𝑎𝑖 𝑜𝑢𝑡𝑝𝑢𝑡 𝑚𝑎𝑘𝑠𝑖𝑚𝑎𝑙
𝑛𝑖𝑙𝑎𝑖 𝑠𝑒𝑛𝑠𝑜𝑟 𝑚𝑎𝑘𝑠𝑖𝑚𝑎𝑙 = 𝑛𝑖𝑙𝑎𝑖 𝑑𝑎𝑡𝑎 𝑟𝑒𝑎𝑙 113,63 × 100000𝐾𝑔𝐹
1250 = 9090,90𝐾𝑔𝐹
Sehingga nilai data perhitungan pada percobaan selektor 2 output 0-100000KgF dengan jarak pergeseran 1cm adalah 9090,90KgF.
3. Nilai data percobaan
Karena sensor tidak dapat membaca nilai output sensor sebesar 113,63 maka pada percobaan nilai yang terbaca oleh sensor adalah 114. Sehingga nilai dari data percobaan adalah 9120KgF dan diperoleh dari rumus berikut ini:
𝑛𝑖𝑙𝑎𝑖 𝑠𝑒𝑛𝑠𝑜𝑟 𝑡𝑒𝑟𝑏𝑎𝑐𝑎 × 𝑛𝑖𝑙𝑎𝑖 𝑜𝑢𝑡𝑝𝑢𝑡 𝑚𝑎𝑘𝑠𝑖𝑚𝑎𝑙
𝑛𝑖𝑙𝑎𝑖 𝑠𝑒𝑛𝑠𝑜𝑟 𝑚𝑎𝑘𝑠𝑖𝑚𝑎𝑙 = 𝑛𝑖𝑙𝑎𝑖 𝑑𝑎𝑡𝑎 𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑎𝑛 114 × 100000𝐾𝑔𝐹
1250 = 9120𝐾𝑔𝐹 4. Nilai error
Karena nilai percobaan yang diperoleh berbeda dari nilai real maka nilai error dapat dihitung dengan rumus berikut :
𝑛𝑖𝑙𝑎𝑖 𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑎𝑛 − 𝑛𝑖𝑙𝑎𝑖 𝑟𝑒𝑎𝑙
𝑛𝑖𝑙𝑎𝑖 𝑟𝑒𝑎𝑙 × 100% = %𝑒𝑟𝑟𝑜𝑟 Jadi nila errornya adalah :
9120 − 9090,90
9090,90 × 100% = 0,32% Sehingga nilai error pada percoban ini adalah 0,32%.
Tabel 4.6. Data percobaan, data perhitungan dan error data pada selektor 2 Jarak pergeseran Data percobaan Data perhitungan Error data
1 9120KgF 9090,90KgF 0,32% 2 18240KgF 18181,81KgF 0,32% 3 27280KgF 27272,72KgF 0,0267% 4 36400KgF 36363,63KgF 0,1% 5 45520KgF 45454,54KgF 0,144% 6 54560KgF 54545,45KgF 0,027% 7 63680KgF 63636,36KgF 0,07% 8 72800KgF 72727,27KgF 0,1% 9 81840KgF 81818,18KgF 0,027% 10 90960KgF 90909,09KgF 0,056% 11 100000KgF 100000 KgF 0%
Pada tabel 4.3. telah ditampilkan data perhitungan dan data output sensor yang terbaca memiliki perbedaan nilai, sehingga pada percobaan menggunakan selektor 2 output data percobaan dan perhitungan memiliki nilai yang berbeda. Pada tabel 4.6. dapat dilihat nilai dari data percobaan, data perhitungan dan error data. Pada percobaan menggunakan selektor 2 nilai error yang diperoleh memiliki rentang 0% sampai dengan 0,32%.
Gambar 4.10. Grafik Data Pengujian dan Data Perhitungan Pada Selektor 2
Pada grafik yang ditunjukkan gambar 4.10. dapat dilihat bahwa perbedaan output dari perhitungan dan percoban memiliki perbedan nilai yang sangat kecil. Pada grafik yang ditunjukkan gambar 4.10. dapat dilihat bahwa perbedaan output dari perhitungan dan percoban memiliki perbedan nilai yang sangat kecil. Pada percobaan menggunakan selek-
0 20000 40000 60000 80000 100000 120000 1 2 3 4 5 6 7 8 9 1 0 1 1 N IL A I O UT PUT ( KG F) JARAK PERGESERAN (CM)
tor 2 perbedaan output perhitungan dengan percobaan memiliki rentang nilai 0KgF sampai dengan 58,18KgF, sehingga grafik menunjukkan titik yang bersinggungan. Pada percobaan ini nilai error yang dihasilkan memiliki rentang persentase antara 0% sampai dengan 0,32%.
4.3.3. Hasil pengujian alat pada seleketor 3 dengan nilai output 0-150000KgF
Hasil pengujian alat dapat dilihat pada tabel berikut ini.
Tabel 4.7. Data Percobaan selektor 3 dengan nilai output 0 sampai 150000KgF Selektor 3
jarak Jar
ak
Data Percobaan
Percobaan 1 Percobaan 2 Percobaan 3 Percobaan 4 Percobaan 5 Rata-Rata 1 13680KgF 13680KgF 13680KgF 13680KgF 13680KgF 13680KgF 2 27360KgF 27360KgF 27360KgF 27360KgF 27360KgF 27360KgF 3 40920KgF 40920KgF 40920KgF 40920KgF 40920KgF 40920KgF 4 54600KgF 54600KgF 54600KgF 54600KgF 54600KgF 54600KgF 5 68280KgF 68280KgF 68280KgF 68280KgF 68280KgF 68280KgF 6 81840KgF 81840KgF 81840KgF 81840KgF 81840KgF 81840KgF 7 95520KgF 95520KgF 95520KgF 95520KgF 95520KgF 95520KgF 8 109200KgF 109200KgF 109200KgF 109200KgF 109200KgF 109200KgF 9 122760KgF 122760KgF 122760KgF 122760KgF 122760KgF 122760KgF 10 136440KgF 136440KgF 136440KgF 136440KgF 136440KgF 136440KgF 11 150000KgF 150000KgF 150000KgF 150000KgF 150000KgF 150000KgF
Dari tabel 4.7. setelah dilakukan percobaan sebanyak lima kali untuk nilai output 0 sampai 100000KgF diperoleh data rata-rata untuk jarak pergeseran 1cm sebesar 13680KgF, 2cm sebesar 27360KgF, 3cm sebesar 40920KgF, 4cm sebesar 54600KgF, 5cm sebesar 68040KgF, 6cm sebesar 81840KgF, 7cm sebesar 95520KgF, 8cm sebesar 108120KgF, 9cm sebesar 122760KgF, 10cm sebesar 136440KgF, 11cm sebesar 150000KgF. Nilai rata-rata percobaan diperoleh dari rumus berikut:
(𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑛 1) + (𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑛 2) + (𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑎𝑛 3) + (𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑛 4) + (𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑎𝑛 5)
𝑡𝑜𝑡𝑎𝑙 𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑎𝑛 𝑦𝑎𝑛𝑔 𝑑𝑖𝑙𝑎𝑘𝑢𝑘𝑎𝑛
Sehingga dari percoban mengunakan selektor 3 dengan nila output 0 sampai 150000KgF diperoleh data :
Nilai rata-rata untuk pergeseran 1cm adalah sebagai berikut :
13680𝐾𝑔𝐹 + 13680𝐾𝑔𝐹 + 13680𝐾𝑔𝐹 + 13680𝐾𝑔𝐹 + 13680𝐾𝑔𝐹
5 = 13680𝐾𝑔𝐹
Pada percoban dengan selektor 3 dan jarak pergerseran 1cm nilai output sensor, nilai data yang sebenarnya, nilai data percobaan dan error data dapat dihitung dengan rumus berikut ini :
1. Nilai dari output sensor
Pada gambar 4.7. dan tabel 4.1 telah dijelaskan bahwa output sensor untuk pergeseran 11cm adalah 1250 maka untuk pergeseran 1cm nilai output sensornya :
( 𝑛𝑖𝑙𝑎𝑖 𝑚𝑎𝑘𝑠𝑖𝑚𝑎𝑙 𝑠𝑒𝑛𝑠𝑜𝑟
𝑗𝑎𝑟𝑎𝑘 𝑚𝑎𝑘𝑠𝑖𝑚𝑎𝑙 𝑝𝑒𝑟𝑔𝑒𝑠𝑒𝑟𝑎𝑛) × 𝑗𝑎𝑟𝑎𝑘 𝑦𝑎𝑛𝑔 𝑑𝑖𝑔𝑢𝑛𝑎𝑘𝑎𝑛 = 𝑛𝑖𝑙𝑎𝑖 𝑠𝑒𝑛𝑠𝑜𝑟 (1250
11 ) × 1 = 113,63 2. Nilai data perhitungan
Karena nilai sensor pada jarak pergeseran 1cm adalah 113,63 maka nilai data perhitungannyanya adalah :
𝑛𝑖𝑙𝑎𝑖 𝑟𝑒𝑎𝑙 𝑠𝑒𝑛𝑠𝑜𝑟 × 𝑛𝑖𝑙𝑎𝑖 𝑜𝑢𝑡𝑝𝑢𝑡 𝑚𝑎𝑘𝑠𝑖𝑚𝑎𝑙
𝑛𝑖𝑙𝑎𝑖 𝑠𝑒𝑛𝑠𝑜𝑟 𝑚𝑎𝑘𝑠𝑖𝑚𝑎𝑙 = 𝑛𝑖𝑙𝑎𝑖 𝑑𝑎𝑡𝑎 𝑟𝑒𝑎𝑙 113,636363 × 150000𝐾𝑔𝐹
1250 = 13636,36𝐾𝑔𝐹
Sehingga nilai data perhitungan pada percobaan selektor 3 output 0-150000KgF dengan jarak pergeseran 1cm adalah 13636,36KgF.
3. Nilai data percobaan
Karena sensor tidak dapat membaca nilai output sensor sebesar 113,63 maka pada percobaan nilai yang terbaca oleh sensor adalah 114. Sehingga nilai dari data percobaan adalah 13680KgF dan diperoleh dari rumus berikut ini:
𝑛𝑖𝑙𝑎𝑖 𝑠𝑒𝑛𝑠𝑜𝑟 𝑡𝑒𝑟𝑏𝑎𝑐𝑎 × 𝑛𝑖𝑙𝑎𝑖 𝑜𝑢𝑡𝑝𝑢𝑡 𝑚𝑎𝑘𝑠𝑖𝑚𝑎𝑙
𝑛𝑖𝑙𝑎𝑖 𝑠𝑒𝑛𝑠𝑜𝑟 𝑚𝑎𝑘𝑠𝑖𝑚𝑎𝑙 = 𝑛𝑖𝑙𝑎𝑖 𝑑𝑎𝑡𝑎 𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑎𝑛 114 × 150000𝐾𝑔𝐹
1250 = 13680𝐾𝑔𝐹 4. Nilai error
Karena nilai percobaan yang diperoleh berbeda dari nilai real maka nilai error dapat dihitung dengan rumus berikut :
𝑛𝑖𝑙𝑎𝑖 𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑎𝑛 − 𝑛𝑖𝑙𝑎𝑖 𝑟𝑒𝑎𝑙
𝑛𝑖𝑙𝑎𝑖 𝑟𝑒𝑎𝑙 × 100% = %𝑒𝑟𝑟𝑜𝑟 Jadi nila errornya adalah :
13680 − 13636,36
13636,36 × 100% = 0,32% Sehingga nilai error pada percoban ini adalah 0,32%.
Tabel 4.8. Data percobaan, data perhitungan dan error data pada selektor 3 Jarak pergeseran Data percobaan Data perhitungan Error data
1 13680KgF 13636,36KgF 0,32% 2 27360 KgF 27272,72KgF 0,32% 3 40920 KgF 40909,09KgF 0,0267% 4 54600 KgF 54545,45KgF 0,1% 5 68280 KgF 68181,81KgF 0,144% 6 81840 KgF 81818,18KgF 0,027% 7 95520 KgF 95454,54KgF 0,07% 8 109200 KgF 109090,90KgF 0,1% 9 122760 KgF 122727,27KgF 0,027% 10 136440 KgF 136363,63KgF 0,056% 11 150000 KgF 150000KgF 0%
Pada tabel 4.3. telah ditampilkan data perhitungan dan data output sensor yang terbaca memiliki perbedaan nilai, sehingga pada percobaan menggunakan selektor 3 output data percobaan dan perhitungan memiliki nilai yang berbeda. Pada tabel 4.8. dapat dilihat nilai dari data percobaan, data perhitungan dan error data. Pada percobaan menggunakan selektor 3 nilai error yang diperoleh memiliki rentang 0% sampai dengan 0,32%.
Gambar 4.11. Grafik Data Pengujian dan Data Perhitungan Pada Selektor 3 Pada grafik yang ditunjukkan gambar 4.11. dapat dilihat bahwa perbedaan output
0 20000 40000 60000 80000 100000 120000 140000 160000 1 2 3 4 5 6 7 8 9 1 0 1 1 N IL A I O UT PUT ( KG F) JARAK PERGESERAN (CM)
perhitungan dan percoban memiliki perbedan nilai yang sangat kecil. Pada percobaan menggunakan selektor 3 perbedaan output perhitungan dengan percobaan memiliki rentang nilai 0KgF sampai dengan 87,27KgF, sehingga grafik menunjukkan titik yang bersinggungan. Pada percobaan ini nilai error yang dihasilkan memiliki rentang persentase antara 0% sampai dengan 0,32%.
4.3.4. Hasil pengujian alat pada seleketor 4 dengan nilai output 0-200000KgF
Hasil pengujian alat dapat dilihat pada tabel berikut ini.
Tabel 4.9. Data Percobaan selektor 4 dengan nilai output 0 sampai 200000KgF Selektor 4
jarak Jar
ak
Data Percobaan
Percobaan 1 Percobaan 2 Percobaan 3 Percobaan 4 Percobaan 5 Rata-Rata 1 18240KgF 18240KgF 18240KgF 18240KgF 18240KgF 18240KgF 2 36480 KgF 36480KgF 36480KgF 36480KgF 36480KgF 36480KgF 3 54560 KgF 54560KgF 54560KgF 54560KgF 54560KgF 54560KgF 4 72800 KgF 72800KgF 72800KgF 72800KgF 72800KgF 72800KgF 5 91040 KgF 91040KgF 91040KgF 91040KgF 91040KgF 91040KgF 6 109120KgF 109120KgF 109120KgF 109120KgF 109120KgF 109120KgF 7 127360KgF 127360KgF 127360KgF 127360KgF 127360KgF 127360KgF 8 145600KgF 145600KgF 145600KgF 145600KgF 145600KgF 145600KgF 9 163680KgF 163680KgF 163680KgF 163680KgF 163680KgF 163680KgF 10 181920KgF 181920KgF 181920KgF 181920KgF 181920KgF 181920KgF 11 200000KgF 200000KgF 200000KgF 200000KgF 200000KgF 200000KgF
Dari tabel 4.9. setelah dilakukan percobaan sebanyak lima kali untuk nilai output 0 sampai 200000KgF diperoleh data rata-rata untuk jarak pergeseran 1cm sebesar 18240KgF, 2cm sebesar 36480KgF, 3cm sebesar 54560KgF, 4cm sebesar 72800KgF, 5cm sebesar 91040KgF, 6cm sebesar 109020KgF, 7cm sebesar 127360KgF, 8cm sebesar 145600KgF, 9cm sebesar 163680KgF, 10cm sebesar 181920KgF, 11cm sebesar 200000KgF. Nilai rata-rata percobaan diperoleh dari rumus berikut:
(𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑛 1) + (𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑛 2) + (𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑎𝑛 3) + (𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑛 4) + (𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑎𝑛 5)
𝑡𝑜𝑡𝑎𝑙 𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑎𝑛 𝑦𝑎𝑛𝑔 𝑑𝑖𝑙𝑎𝑘𝑢𝑘𝑎𝑛
Sehingga dari percoban mengunakan selektor 4 dengan nila output 0 sampai 200000KgF diperoleh data :
Pergeseran 1cm = 18240KgF
Nilai rata-rata untuk pergeseran 1cm adalah sebagai berikut :
18240𝐾𝑔𝐹 + 18240𝐾𝑔𝐹 + 18240𝐾𝑔𝐹 + 18240𝐾𝑔𝐹 + 18240𝐾𝑔𝐹
5 = 18240𝐾𝑔𝐹
Pada percoban dengan selektor 4 dan jarak pergerseran 1cm nilai output sensor, nilai data yang sebenarnya, nilai data percobaan dan error data dapat dihitung dengan rumus berikut ini :
1. Nilai dari output sensor
Pada gambar 4.7. dan tabel 4.1 telah dijelaskan bahwa output sensor untuk pergeseran 11cm adalah 1250 maka untuk pergeseran 1cm nilai output sensornya :
( 𝑛𝑖𝑙𝑎𝑖 𝑚𝑎𝑘𝑠𝑖𝑚𝑎𝑙 𝑠𝑒𝑛𝑠𝑜𝑟
𝑗𝑎𝑟𝑎𝑘 𝑚𝑎𝑘𝑠𝑖𝑚𝑎𝑙 𝑝𝑒𝑟𝑔𝑒𝑠𝑒𝑟𝑎𝑛) × 𝑗𝑎𝑟𝑎𝑘 𝑦𝑎𝑛𝑔 𝑑𝑖𝑔𝑢𝑛𝑎𝑘𝑎𝑛 = 𝑛𝑖𝑙𝑎𝑖 𝑠𝑒𝑛𝑠𝑜𝑟 (1250
11 ) × 1 = 113,63 2. Nilai data perhitungan
Karena nilai sensor pada jarak pergeseran 1cm adalah 113,63 maka nilai data perhitungannya adalah :
𝑛𝑖𝑙𝑎𝑖 𝑟𝑒𝑎𝑙 𝑠𝑒𝑛𝑠𝑜𝑟 × 𝑛𝑖𝑙𝑎𝑖 𝑜𝑢𝑡𝑝𝑢𝑡 𝑚𝑎𝑘𝑠𝑖𝑚𝑎𝑙
𝑛𝑖𝑙𝑎𝑖 𝑠𝑒𝑛𝑠𝑜𝑟 𝑚𝑎𝑘𝑠𝑖𝑚𝑎𝑙 = 𝑛𝑖𝑙𝑎𝑖 𝑑𝑎𝑡𝑎 𝑟𝑒𝑎𝑙 113,636363 × 200000𝐾𝑔𝐹
1250 = 18181,81𝐾𝑔𝐹
Sehingga nilai data perhitungan pada percobaan selektor 4 output 0-200000KgF dengan jarak pergeseran 1cm adalah 18181,81KgF.
3. Nilai data percobaan
Karena sensor tidak dapat membaca nilai output sensor sebesar 113,63 maka pada percobaan nilai yang terbaca oleh sensor adalah 114. Sehingga nilai dari data percobaan adalah 18240KgF dan diperoleh dari rumus berikut ini:
𝑛𝑖𝑙𝑎𝑖 𝑠𝑒𝑛𝑠𝑜𝑟 𝑡𝑒𝑟𝑏𝑎𝑐𝑎 × 𝑛𝑖𝑙𝑎𝑖 𝑜𝑢𝑡𝑝𝑢𝑡 𝑚𝑎𝑘𝑠𝑖𝑚𝑎𝑙
𝑛𝑖𝑙𝑎𝑖 𝑠𝑒𝑛𝑠𝑜𝑟 𝑚𝑎𝑘𝑠𝑖𝑚𝑎𝑙 = 𝑛𝑖𝑙𝑎𝑖 𝑑𝑎𝑡𝑎 𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑎𝑛 114 × 200000𝐾𝑔𝐹
1250 = 18240𝐾𝑔𝐹 4. Nilai error
Karena nilai percobaan yang diperoleh berbeda dari nilai real maka nilai error dapat dihitung dengan rumus berikut :
𝑛𝑖𝑙𝑎𝑖 𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑎𝑛 − 𝑛𝑖𝑙𝑎𝑖 𝑟𝑒𝑎𝑙
Jadi nila errornya adalah :
18240 − 18181,81
18181,81 × 100% = 0,32% Sehingga nilai error pada percoban ini adalah 0,32%.
Tabel 4.10. Data percobaan, data perhitungan dan error data pada selektor 4 Jarak pergeseran Data percobaan Data perhitungan Error data
1 18240KgF 18181,81KgF 0,32% 2 36480 KgF 36363,63KgF 0,32% 3 54560 KgF 54545,45KgF 0,0267% 4 72800 KgF 72727,27KgF 0,1% 5 91040 KgF 90909,09KgF 0,144% 6 109120 KgF 109090,90KgF 0,027% 7 127360 KgF 127272,72KgF 0,07% 8 145600 KgF 145454,54KgF 0,1% 9 163680 KgF 163636,36KgF 0,027% 10 181920 KgF 181818,18KgF 0,056% 11 200000 KgF 200000KgF 0%
Pada tabel 4.3. telah ditampilkan data perhitungan dan data output sensor yang terbaca memiliki perbedaan nilai, sehingga pada percobaan menggunakan selektor 3 output data percobaan dan perhitungan memiliki nilai yang berbeda. Pada tabel 4.8. dapat dilihat nilai dari data percobaan, data perhitungan dan error data. Pada percobaan menggunakan selektor 3 nilai error yang diperoleh memiliki rentang 0% sampai dengan 0,32%.
Gambar 4.12. Grafik Data Pengujian dan Data Perhitungan Pada Selektor 4
0 50000 100000 150000 200000 250000 1 2 3 4 5 6 7 8 9 1 0 1 1 N IL A I O UP UT ( KGF ) JARAK PERGESERAN (CM)
Pada grafik yang ditunjukkan gambar 4.12. dapat dilihat bahwa perbedaan output dari perhitungan dan percoban memiliki perbedan nilai yang sangat kecil. Pada percobaan menggunakan selektor 4 perbedaan output perhitungan dengan percobaan memiliki rentang nilai 0KgF sampai dengan 116,36KgF, sehingga grafik menunjukkan titik yang bersinggungan. Pada percobaan ini nilai error yang dihasilkan memiliki rentang persentase antara 0% sampai dengan 0,32%.
39
BAB V
KESIMPULAN DAN SARAN
5.1. KESIMPULAN
Dari percobaan pengujian sistem digital alat uji kuat tekan beton dapat disimplkan bahwa :
1. Berdasarkan pengujian menggunakan alat simulasi, nilai kuat tekan beton bisa ditampilkan di LCD untuk 4 skala sesuai dengan pergeran 1cm sampai dengan 11cm. 2. Dari semua percobaan nilai error yang dihasilkan memiliki rentang nilai sebesar 0%
sampai dengan 0,32%.
3. Dari percobaan selektor 1 sampai dengan selektor 4 dengan pergeseran yang sama maka nilai error yang dihasilkan sama.
5.2. SARAN
Dari penelitian ini ada beberapa saran agar penelitian memperoleh hasil yang di inginkan yaitu :
1. Gunakan mouse sesuai dengan kebutuhan, apabila kecepatan pergerakan dari batang besi cepat gunakan mouse dengan resolusi yang lebih tinggi agar pergerakan dapat dibaca oleh sensor optik mouse. apabila pergerakan lambat gunakan mouse dengan resolusi sedang sehingga pergerakan dari batang dapat dibaca dengan akurat.
2. Komunikasi sensor optik dengan arduino dengan USB, kedepannya dapat diganti dengan komunikasi bluetooth atau wireless.
40
DAFTAT PUSTAKA
[1] Putra, Rizal Aulia, 2018, Peran Teknologi Digital Dalam Perkembangan
Dunia Perancangan Arsitektur, Elkawnie: Journal of Islamic Science and
Technology, Volume 4, No.1, Hal. 67-78.
[2] Muhasim, 2017, Pengaruh Tehnologi Digital Terhadap Motivasi Belajar
Peserta Didik, Palapa: Jurnal Studi Keislaman dan Ilmu Pendidikan, Volume 5, No. 2, hal. 53-77.
[3] Suryono, 2018, Teknologi Sensor, Edisi Pertama, Undip Press, Semarang. [4] Karim, Syaiful., 2013, Sensor dan Aktuator, Ppptk Boe Malang, Malang.
[5] McCormac, Jack C., 2004, Desain Beton Bertulang, Edisi Kelima, Erlangga, Jakarta.
[6] Robotic University, 2014, SensorOptik,
http://www.robotics-university.com/2014/11/sensor-optik.html, diakses pada 8 Januari 2020. [7] Arduino Indonesia, 2017, Arduino Uno,
https://www.arduinoindonesia.id/2017/02/arduino-uno.html, diakses pada 8 Januari 2020.
[8] Parallex, 4x4 Matrix Membran Keypad,
https://www.parallax.com/sites/default/files/downloads/27899-4x4-Matrix-Membrane-Keypad-v1.2.pdf, diakses pada 9 Januari 2020.
41
Listing Keselruhan Program
#include <hidboot.h> #include <usbhub.h> #ifdef dobogusinclude #include <spi4teensy3.h> #endif #include <SPI.h> #include <Keypad.h> #include <LiquidCrystal.h> LiquidCrystal lcd(A5,A4,A3,A2,A1,A0); int b; float data=0; int menu = 0; int selektor = 0;String atas=" ALAT UJI";
String bawah=" TEKANAN BETON"; String atasFix, bawahFix, waktu;
int hasil; int a = 0; int detik = 0; int menit = 0; int jam =0; int tanda =0; char key;
const byte ROWS = 4; //4 baris const byte COLS = 4; //4 kolom char keys[ROWS][COLS] = { {'1','2','3','A'},
{'4','5','6','B'}, {'7','8','9','C'}, {'*','0','#','D'}