ATMEGA8535
SKRIPSI
Oleh :
CANDRA TANTYO PUTRA PRASETYO
NPM. 0734010037
J URUSAN TEKNIK INFORMATIKA FAKULTAS
TEKNOLOGI INDUSTRI UNIVERSITAS PEMBANGUNAN
NASIONAL
"
VETERAN
"
J AWA TIMUR
ATMEGA8535
SKRIPSI
Diajukan Untuk Memenuhi Sebagai Persyaratan
Dalam Memperoleh Gelar Sarjana Komputer
Jurusan Teknik Informatika
Oleh :
CANDRA TANTYO PUTRA PRASETYO
NPM. 0734010037
J URUSAN TEKNIK INFORMATIKA FAKULTAS
TEKNOLOGI INDUSTRI UNIVERSITAS PEMBANGUNAN
NASIONAL
"
VETERAN
"
J AWA TIMUR
PENGENDALIAN ROBOT BECAK MENGGUNAKAN
SENSOR KAMERA DENGAN MIKROKONTROLER
ATMEGA8535
Oleh :
CANDRA TANTYO PUTRA PRASETYO
NPM. 0734010037
Telah disetujui untuk mengikuti Ujian Negara Lisan Gelombang Tahun Akademik 2011/2012
Pembimbing Utama Pembimbing Pendamping
Basuki Rahmat. S.Si. MT Ir. Kartini,S.Kom, MT
NIP/NPT. 3 6907 06 0209 1 NIP/NPT. 19611110 199103 2001
Mengetahui,
Ketua J urusan Teknik Infor matika Fakultas Teknologi Industri UPN ”Veteran” J awa Timur
PENGENDALIAN ROBOT BECAK MENGGUNAKAN
Telah dipertahankan di hadapan dan diterima oleh Tim Penguji Skr ipsi J urusan Teknik Infor matika Fakultas Teknologi Industri
Univer sitas Pembangunan Nasional ”Veteran” J awa Timur Pada Tanggal 14 Desember 2012
Pembimbing : Tim Penguji :
Univer sitas Pembangunan Nasional ”Veteran” J awa Timur
i
Pembimbing 2 : Ir. Kartini S.Kom. MT Penyusun : Candra Tantyo Putra Prasetyo
ABSTRAK
Di era teknologi seperti saat ini seiring kemajuan teknologi robotika yang
sangat pesat serta banyaknya kontes-kontes robotika belakangan ini membuat
kreatifias akan terciptanya robot-robot canggih semakin berkembang. Adanya wadah
dan komunitas-komunitas robotika dikalangan mahasiswa menjadikan teknologi ini
semakin digemari bahkan mulai menjadi salah satu kontes yang mengharumkan nama
bangsa di dunia internasional.
Pada penelitian ini akan di kembangkan suatu sistem dengan menggunakan
sensor kamera yang dapat bergerak menghampiri objek sebuah benda berwarna
kuning. Sistem ini merupakan tahap awal untuk mengembangkan suatu sensor dalam
bentuk pengolahan citra.
Dalam subsistem pengolahan citra digunakan sensor kamera sebagai
pengambilan data gambar sebagai pendeteksi objek benda berwarna yang ada di
depanya. Pada proses ini di gunakan compiler bahasa pemograman C. Subsistem
perangkat keras yang digunakan adalah robot becak Surabaya yang telah dibuat pada
penelitian sebelumnya. Subsistem pengendali menggunakan satu buah mikrokontroler
ATMEGA8535, sensor kamera CMUCam, Motor DC, Servo.
Hasil dari penelitian ini bahwa sebuah sensor CMUCam dapat mengetahui
sebuah objek benda berwarna. Jenis sensor ini akan berpengaruh pada jenis keadaan
yang ada di sekitarnya, misal Terang, Redup dan Gelap. Karena nilai RGB yang di
dapat akan berbeda dari keadaan tersebut.
Kata Kunci : Robot Becak, Motor DC, Servo, Kamera CMUCam, ATMega8535,
ii
Segala Puji Bagi ALLAH SWT atas segala limpahan Karunia-Nya sehingga
dengan segala keterbatasan waktu, tenaga dan pikiran yang dimiliki penyusun,
akhirnya penyusun dapat menyelesaikan Skripsi dengan judul “PENGENDALIAN
ROBOT BECAK MENGGUNAKAN SENSOR KAMERA DENGAN
MIKROKONTROLER ATMEGA8535” dengan tepat waktu.
Skripsi ini merupakan syarat akademis yang harus dipenuhi oleh mahasiswa
jurusan Teknik Informatika UPN “Veteran” Jawa Timur Surabaya.
Dalam penulisan laporan skripsi ini penulis menyadari telah mendapatkan
banyak bantuan dari berbagai pihak baik segi moril maupun materil. Oleh karena itu
pada kesempatan ini penulis ingin mengucapkan terima kasih yang sebesar-besarnya
kepada :
1) Bapak Prof. Dr. Ir. Teguh Soedarto, MP, Selaku Rektor Universitas
Pembangunan Nasional “Veteran” Jawa Timur Surabaya.
2) Bapak Ir. Sutiyono, MT, selaku Dekan Fakultas Teknologi Industri
Universitas Pembangunan Nasional “Veteran” Jawa Timur Surabaya.
3) Ibu Dr. Ir. Ni Ketut Sari, MT selaku Ketua Jurusan Teknik Informatika
Universitas Pembangunan Nasional “Veteran” Jawa Timur Surabaya.
4) Bapak Basuki Rahmat, Ssi, MT dan Ibu Ir. Kartini MT selaku dosen
pembimbing di jurusan Teknik Informatika Universitas Pembangunan
iii
5) Untuk Keluarga tersayang ( Ayah, Ibu, Kakak, Adik ) yang telah memberikan
dukungan, doa, cinta, dan kasih sayang dan semua pengorbanan yang beliau
berikan.
6) Untuk saudara Suep Rizal dan Astria Rus Andika Susila yang telah memberi
ijin untuk robotnya di kembangkan dan di oprek-oprek.
7) Teman-teman penulis : Untuk Teman-teman seangkatan, Malik, Faisol, Juzz,
Ardi, Cicik, Tobib, Adi Nugroho, Gibran, Gigih, Nophan, Rizal, Aditya, dan
semua teman yang berjasa atas dukungannya dan semua pihak yang tidak
mungkin penulis sebutkan namanya satu per satu terima kasih telah membantu
penulis untuk menyelesaikan skripsi ini.
Penulis menyadari bahwa dalam penulisan laporan skripsi ini masih banyak
kekurangan nya. Oleh sebab itu penulis mengharapkan kritik dan saran yang sifatnya
membangun dari pembaca. Semoga laporan ini bermanfaat bagi penulis dan para
pembaca.
Surabaya, .. Des 2012
iv
2.2.1 Konfigurasi Pin Mikrokontroler ATMega 8535……...13
2.2.2 Peta Memori Mikrokontroler ATMega 8535………….17
2.3 Sistem Minimum………...19
2.8.1 Alasan menggunakan Bahasa C………..27
v
3.1.1 Analisa Perangkat Keras……….…32
3.1.2 Kebutuhan Perangkat Keras………...33
3.1.3 Perancangan Perangkat keras……….34
3.1.4 Perangcangan Badan Robot Becak………36
3.2 Sistem Perangkat Lunak………40
3.2.1 Analisa Perangkat Lunak………40
3.2.2 Perancangan Perangkat Lunak………41
Bab IV IMPLEMENTASI SISTEM……….44
4.1 Perakitan Robot……….44
5.1 Pengujian Sensor Kamera CMUCam………68
5.1.1 Pengukuran Jarak………68
5.2 Pengujian Kemampuan Motor DC………..69
5.3 Pengujian Pada Objek Benda………...70
5.4 Tabel Pengujian……….74
Bab VI PENUTUP………..77
6.1 Kesimpulan………77
6.2 Saran………..78
vi
Gambar 2.1 Blok Diagram Robot………..9
Gambar 2.2 Fisik ATMega 8535……….11
Gambar 2.3 Blok Diagram ATMega 8535………..12
Gambar 2.4 Konfigurasi PIN ATMega 8535………..13
Gambar 2.5 Peta Memori Mikrokontroler ATMega 8535………..18
Gambar 2.6 Minimum Sistem ATMega 8535……….19
Gambar 2.7 CMUCam……….21
Gambar 2.8 Blok Diagram CMUCam……….22
Gambar 2.9 Servo dengan Horn Bulat……….24
Gambar 2.10 Servo dengan Horn X………..24
Gambar 2.11 Cara Kerja Servo………..25
Gambar 2.12 Struktur Penulisan Bahasa C………...28
Gambar 3.1 Flowchart Perakitan Robot………..29
Gambar 3.2 Blok Diagram Sistem………...31
Gambar 3.3 Rancangan Robot Becak………..35
Gambar 3.4 Rancangan Robot Becak dari Bawah………..36
Gambar 3.5 Robot Becak Tampak Samping………...37
Gambar 3.6 Jarak CMUCam Robot………38
Gambar 3.7 Dudukan Sensor Kamera………...………..38
Gambar 3.8 Pengait Servo………...39
Gambar 3.9 Ilustrasi Gerak Robot Terhadap Objek………41
Gambar 3.10 Flowchart Kerja Robot Becak……….42
Gambar 4.1 Bagian Bawah PCB Robot Becak………44
Gambar 4.2 Bagian Atas PCB Robot Becak………...45
Gambar 4.3 Fisik dari PCB Robot Becak………47
Gambar 4.4 PCB CMUCam………48
Gambar 4.5 Fisik PCB CMUCam………...48
vii
Gambar 4.9 Langkah 3 Menginstall Progam Code Vision AVR………..53
Gambar 4.10 Langkah 4 Menginstall Progam Code Vision AVR………..53
Gambar 4.11 Langkah 5 Menginstall Progam Code Vision AVR………..54
Gambar 4.12 Langkah 6 Menginstall Program Code Vision AVR………54
Gambar 4.13 Langkah 7 Menginstall Progam Code Vision AVR………..…………54
Gambar 4.14 Langkah 8 Menginstall Progam Code Vision AVR………..55
Gambar 4.15 Langkah 9 Menginstall Progam Code Vision AVR………..55
Gambar 4.16 Membuat Halaman Baru dengan Code Vision AVR………56
Gambar 4.17 Pilihan Type File dengan Code Vision AVR………56
Gambar 4.18 Konfigurasi Type Chip dengan Code Vision AVR………...57
Gambar 4.19 Konfigurasi Port pada Code Vision AVR………57
Gambar 4.20 Konfigurasi Timers Pada Code Vision AVR………59
Gambar 4.21 Generate Konfigurasi dengan Code Vision AVR……….60
Gambar 4.22 Hasil Desain CodeWizard……….60
Gambar 4.23 Menyimpan ProgamRobot dengan Code Vision AVR………61
Gambar 4.24 Halaman Editor Code Vision AVR………...61
Gambar 4.25 SPI (Serial Peripheral Interface)………..62
Gambar 4.26 Potongan Source Code Servo….……….64
Gambar 4.26 Potongan Source Code Deteksi Objek……….65
Gambar 5.1 Robot Becak yang sudah di rakit...67
Gambar 5.2 Jarak Sensor……….68
Gambar 5.3 Pengujian Motor DC………69
Gambar 5.4 Dengan benda datar warna kuning ( arah lurus )……….70
Gambar 5.5 Robot belok ke arah kanan………..71
Gambar 5.6 Robot belok ke arah kiri………..71
Gambar 5.7 Di luar ruangan dengan cahaya matahari……….72
Gambar 5.8 Pengujian di dalam Ruangan………...72
viii
Tabel 2.2 Fungsi Alternatif Port D...16
Table 2.3 Kata Kunci (Keyword) Pada bahasa C……….26
1 1.1 Latar Belakang
Perkembangan Ilmu Pengetahuan dan Teknologi robotika telah membuat kualitas kehidupan manusia semakin tinggi, hampir dalam setiap aspek kehidupan masyarakat selalu menggunakan teknologi robotika untuk dapat memanfaatkan waktu se-efisien mungkin.
Salah satu pengaplikasian teknologi robotika yang berkembang cepat adalah pada bidang transportasi. Masalah transportasi banyak dibahas baik di Negara berkembang atau Negara maju, salah satu masalah tersebut adalah kemacetan yang dikarenakan bertambahnya populasi kendaraan dimana hal ini dipicu oleh bertamabahnya pengguna dalam setiap tahunnya. Sehingga memerlukan trobosan inovasi serta pengaplikasian teknologi terbaru yang sesuai dengan kondisi saat ini.
Untuk mengupayakan terciptanya kendaraan yang sesuai dengan kondisi saat ini, maka perusahaan otomotif Honda mengembangkan robot becak Hi-Tech. Dimana robot ini diharapkan dapat melintasi di jalan yang macet dan sempit serta ramah terhadap lingkungan.
merupakan tahap awal untuk mengembangkan suatu sensor dalam bentuk image processing.
Sistem ini di bagi menjadi beberapa subsistem yaitu subsistem pengolahan image processing, subsistem perangkat keras dan subsistem pengendali. Dalam subsistem pengolahan image processing digunakan sensor kamera sebagai pengambilan data gambar dan proses. Pada proses ini di gunakan compiler bahasa pemograman C. Subsistem pengolahan image processing berguna mendeteksi adanya objek. Metode yang digunakan untuk medeteksi keberadaan objek tersebut adalah menggunakan sensor kamera jenis CMUCam. Subsistem perangkat keras yang digunakan adalah robot becak Surabaya yang telah dibuat pada penelitian sebelumnya. Subsistem pengendali menggunakan satu buah mikrokontroler ATMEGA8535, sensor kamera dapat menangkap gambar pada jarak 5cm sampai dengan 10cm.
1.2 Rumusan Masalah
Adapun permasalahan yang akan dibahas adalah sebagai berikut :
1. Bagaimana merancang algoritma program yang tepat agar mikrokontroller dapat mengelola data berupa objek berwarna..? 2. Bagaimana membuat rancangan hardware dengan sensor kamera
CMUCam yang dapat mengelola data objek berwarna..?
3. Bagaimana mengembangkan suatu sensor kamera dalam bentuk image processing..?
1.3 Batasan Masalah
Adapun batasan-batasan masalah yang dibuat agar dalam pengerjaan tugas akhir ini dapat berjalan degan baik adalah sebagai berikut :
1. Pengujian robot ini pada sebuah bidang datar, tidak licin dan tidak ada halangan di sekitarnya.
2. Sensor kamera hanya mampu mendeteksi objek berwarna di sekitarnya dengan jangkauan 5cm sampai dengan 10cm dan mempunyai tinggi tidak kurang dari tinggi sensor kamera terhadap lapangan.
3. Objek berupa bola plastic berwarna kuning. 4. Target berupa benda diam.
5. Bahasa pemrograman yang digunakan adalah Bahasa C.
1.4 Tujuan
Tujuan utama dari tugas akhir ini adalah merencanakan dan merealisasikan sebuah robot dari hasil karya seni dengan kemampuan mendeteksi sebuah objek berwarna dan objek tersebut diam ( tidak bergerak ). Mengacu pada tujuan utama pada tugas akhir ini maka terdapat beberapa tujuan khusus antara lain :
1. Menggabungkan hasil karya seni dengan teknologi modern, sehingga memiliki nilai lebih.
2. Merancang dan membuat robot untuk dapat mengenali sebuah objek berwarna.
4. Mempelajari dan mengendalikan Mokrokontroller ATMega8535 dengan sensor kamera jenis CMUCam.
1.5 Manfaat
Adapun manfaat yang dapat diambil dari pembuatan Robot Becak dengan menggunakan ATmega8535 ini adalah :
1. Digunakan sebagai bahan media pembelajaran di Laboratorium Robotika UPN Veteran Jawa Timur.
2. Sebagai bahan motivator mahasiswa UPN Veteran khusunya dan para pelaku pendidikan untuk lebih mengembangkan robot yang lebih canggih.
1.6 Metode Penelitian
Metodologi yang digunakan pada penelitian ini adalah sebagai berikut : 1. Studi literature mengenai pengendalian sensor kamera terhadap
objek berwarna dengan menggunakan mikrokontroler ATMega8535.
2. Merancang serta menguji sensor kamera yang merupakan pengendali robot.
3. Merancang serta menguji sistem minimal Mikrokontroler ATMega8535 sebagai pengendali sistem secara keseluruhan. 4. Merancang perangkat lunak yang berfungsi untuk membangkitkan
5. Menguji kinerja sistem secara keseluruhan serta mengambil data dari hasil perancangan.
6. Menganalisa hasil dan membuat kesimpulan.
1.7 Sistematik Penulisan
Adapun Sistematika Tugas Akhir ini adalah:
BAB I : PENDAHULUAN
Bab ini menjelaskan tentang latar belakang, rumusan masalah, batasan masalah, tujuan, manfaat, metodologi penelitian dan sistematika penulisan.
BAB II : TINJ AUAN PUSTAKA
Pada bab ini dijelaskan tentang teori-teori serta penjelasan-penjelasan yang dibutuhkan dalam
pembuatan robot becak menggunakan sensor kamera CMUCam dengan mikrokontroler ATMega8535.
BAB III : PERANCANGAN
BAB IV : HASIL DAN PEMBAHASAN
Bab ini berisi penjelasan hasil Tugas Akhir serta pembahasannya tentang robot becak dengan sensor kamera CMUCam menggunakan ATMega8535.
BAB V : UJ I COBA DAN EVALUASI PROGRAM Bab ini berisi pengujian program Tugas Akhir.
BAB VI : KESIMPULAN DAN SARAN
7
BAB II
TINJ AUAN PUSTAKA
2.1 Sejarah dan Per kembangan Robot
Kemajuan teknologi umat manusia memang sangat mengagumkan. Bermula dari rasa ingin tahu, berkembang menjadi sebuah temuan yang mengagumkan. Adalah robot, salah satu penemuan yang paling mengagumkan dalam sejarah manusia pada abad ke 20. Postingan singkat ini akan menguak bagaimana sejarah awal dari sebuah sistem mekanika rumit dan bergerak, mampu hadir ditengah masyarakat hingga kini, yang kita kenal dengan sebutan Robot.
Robot adalah alat menaknika yang dapat melakukan tugas fisik, baik lewat pantauan manusia, maupun bekerja secara komputerisasi yang menghasilkan kecerdasan dan perilaku yang individu.
Kata robot sendiri, diperkenalkan oleh seorang penulis sains-fiksi berkebangsaan Ceko (Czech), Karel Capek (9 Januari 1890-25 Desember 1938) pada tahun 1920an.
Robot sendiri, menurut Karel Capek, bukanlah pengertian "robot" yang seperti kita kenal sekarang ini. Robot menurut dia adalah sesuatu yang mengarah kepada "monoton", dan "pekerja".
Karel Capek memperkenalkan istilah robot (robota, bahasa Ceko-Ensiklopedia Indonesia) dalam sebuah karya sandiwaranya, Rossum's Universal Robot.
manusia itu sendiri. Namun fasilitas pengetahuan pada masa itu nampaknya menjadi kendala terbesar dalam terwujudnya proyek tersebut. Akhirnya, dibuatlah robot sederhana beroda yang digunakan untuk keperluan navigasi, pengamatan tingkah laku, sampai dengan perencanaan jalur.
Berkembanglah robot dengan konsep heksapoda (konsep kaki enam) dan beberapa platform kaki banyak lainya. Dan pada pada masa itu, serangga menjadi inpirasi dalam pembuatan robot.
Saat ini, robot secara umum berfungsi sebagai pengganti pekerjaan manusia, seperti membersihkan limbah beracun, untuk operasi medis, untuk keperluan militer, untuk penyelidikan wahana dalam air, penjelajahan luar angkasa, keperluan produksi, sampai untuk memotong rumput dan membersihkan debu.
Sekarang, robot sudah menjadi suatu perangkat yang sangat berguna. Walaupun definisi robot sendiri sangat banyak dan berbeda tiap negara dan organisasi, namun, rupanya robot tidak hanya mendatangkan berbagai manfaat, tapi juga kekhawatiran.
Istilah robot sekarang secara populer diartikan sebagai apa saja yang dapat membentuk mesin–mesin robot yang diletakkan bersamaan dan bekerja secara mandiri. Pada umumnya bagian–bagian yang menunjang pembentukan suatu robot adalah :
input dan mengontrol apa yang akan dilakukan pada bagian output - nya.
• Obstacle Detectors, Vision System, ini sebenarnya bagian dari input yang memberikan masukan–masukan variabel guna diolah untuk menentukan apa yang dilakukan oleh bagian outputnya.
• Driver Motor, Arm, Gripper : tidak seluruhnya harus terpasang
lengkap, namun driver motor adalah yang paling dominan banyak dijumpai pada robot, dan ini adalah bagian dari output sistemnya. Pada umumnya bagian ini ditunjang oleh seperangkat alat–alat mekanis.
• Central Power System : bagian ini amat vital karena merupakan nyawa
bagi robot. Ketiga bagian di atas selalu membutuhkan daya untuk dapat bekerja, maka bagian ini sangat penting.
Berikut gambar 2.1 Blok Diagram Robot secara umum yang menggambarkan deskripsi di atas :
Dari gambar 2.1 dapat terlihat bahwa sebuah robot sebagian besar terdiri dari rangkaian mekanik yang saling terintegrasi satu dengan yang lainya.
Sumber : http://kolom-inspirasi.blogspot.com/2011/09/sejarah-dan-perkembangan-robot-di-dunia.html#ixzz1oDBAosiI
2.2 Mikrokontroller ATMega 8535
Mikrokontroler merupakan suatu terobasan teknologi mikroprosesor dan mikrokomputer yang merupakan teknologi semikonduktor dengan kandungan transistor yang lebih banyak namun hanya membutuhkan ruang yang sangast kecil, Lebih lanjut, mikrokontroler merupakan system computer yang mempunyai satu atau beberapa tugas yang sangat spesifik, berbeda dengan PC (Personal
Computer ) yang memiliki beragam fungsi.
Tidak seperti sistem komputer yang mampu menangani berbagai macam program aplikasi, mikrokontrler hanya bisa digunakan untuk suatu aplikasi tertentu saja, perbedaan lainnya terletak pada perbandingan RAM dan ROM. Pada sistem komputer perbandingan RAM dan ROM nya besar, artinya program-program penggunba disimpan dalam ruang RAM yang relative besar, sedangkan rutin-rutin antar muka perangkat keras disimpan dalam ruang ROM yang kecil, Sedangkan pada mikrokontroler, perbandingan ROM dan RAM –nya yang besar, artinya program kontrol disimpan dalm ROM (bias Masked ROM atau Flash
Mikrokontroler merupakan keseluruhan sistem komputer yang dikemas menjadi sebuah chip di mana di dalamnya sudah terdapat Mikroprosesor, I/O, Memori bahkan ADC, berbeda dengan Mikroprosesor yang berfungsi sebagai pemroses data (Heryanto, dkk, 2008:1).
Mikrokontroller AVR (Alf and Vegard’s Risc processor) memiliki arsitektur 8 bit, dimana semua instruksi dikemas dalam kode 16-bit dan sebagian besar instruksi dieksekusi dalam 1 siklus clock atau dikenal dengan teknologi RISC (Reduced Instruction Set Computing). Secara umum, AVR dapat dikelompokan ke dalam 4 kelas, yaitu keluarga AT90Sxx, keluarga ATMega dan AT86RFxx. Pada dasarnya yang membedakan masing-masing adalah kapasitas memori, peripheral dan fungsinya (Heryanto, dkk, 2008:1). Dari segi arsitektur dan instruksi yang digunakan, mereka bisa dikatakan hampir sama. Gambar 2.2 berikut ini adalah gambar Mikrokontroler Atmega8535.
Gambar 2.3 Blok Diagram ATMega 8535
Dari gambar 2.3 dapat dilihat bahwa ATMega 8535 memiliki kontruksi bagian sebagai berikut :
1. Saluran I/O sebanyak 32 buah, yaitu Port A,Port B,Port C dan Port D. 2. ADC 8 channel 10 bit.
3. Tiga buah Timer/Counter dengan kemampuan pembanding. 4. CPU yang terdiri atas 32 buah register.
5. Watchdogtimer dengan osilator internal. 6. SRAM sebesar 512 byte.
7. Memori Flash sebesar 8 KB dengan kemampuan Read While Write. 8. Interruptinternal dan eksternal.
9. Port antarmuka SPI (Serial Peripheral Interface).
10.EEPROM sebesar 512 byte yang dapat diprogram saat operasi. 11.Antarmuka komparator analog.
12.Port USART untuk komunikasi serial
Kapabilitas detail dari ATMega 8535 adalah sebagai berikut :
2. Kapasitas memori flash 8 KB, SRAM sebesar 512 byte dan EEPROM (Electrically Eraseble Programable Read Only Memory) sebesar 512 byte.
3. ADC internal dengan fasilitas 10 bit sebanyak 8 chanel.
4. Portal komunikasi serial (USART) dengan kecepatan maksimal 2.5 Mbps.
5. Enam pilihan mode sleep menghemat penggunaan daya listrik.
2.2.1 Konfigurasi Pin ATMega 8535
Konfigurasi pin ATMega 8535 bisa dilihat pada gambar 2.4 di bawah ini.
Gambar 2.4 Konfigurasi Pin ATMega 8535
Dari gambar 2.4 tersebut dapat dijelaskan secara fungsional konfigurasi pin pada ATMega 8535 sebagai berikut :
3. Port A (PA0...PA7) merupakan pin I/O dua arah dan pin masukan ADC.
4. Port B (PA0...PB7) merupakan pin I/O dua arah dan pin fungsi khusus yaitu Timer/Counter, Komperator analog dan SPI.
5. Port C (PC0...PC7) merupakan pin I/O dua arah dan pin khusus yaitu TWI, Komperator Analog dan Timer Oscillator.
6. Port D (PD0...PD7) merupakan pin I/O dua arah dan pin fungsi khusus yaitu komperator analog, interupsi eksternal dan komunikasi serial. 7. RESET merupakan pin yang digunakan untuk mereset
mikrokontroller.
8. XTL1 dan XTAL2 merupakan pin masukan clock eksternal. 9. AVCC merupakan masukan untuk tegangan ADC.
10.AREF merupakan pin masukan tegangan refrensi ADC. Berikut adalah penjelasan fungsi tiap kaki.
1. PORT A
2. PORT B
Merupakan 8 bit directional port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer port B dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register Port B (DDRB) diisi 0 jika ingin memfungsikan pin-pin port B yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Port B juga memiliki untuk fungsi alternatif seperti yang terlihat pada tabel 2.1 berikut :
Tabel 2.1 Fungsi Alternatif Port B
Port Pin Fungsi Khusus
PB0 T0 = timer/counter 0 external counter input PB1 T1 = timer/counter 0 external counter input PB2 AIN0 = analog comparator positive input PB3 AIN1 = analog comparator negative input PB4 SS = SPI slave select input
PB5 MOSI = SPI bus master output/slave input PB6 MISO = SPI bus master input/slave output PB7 SCK = SPI bus serial clock
3. PORT C
dua pin port C (PC6 dan PC7) juga memiliki fungsi alternatif sebagai mengendalikan display LED secara langsung. Data Direction Register port D (DDRD) harus disetting terlebih dahulu sebelum port D digunakan. Bit-bit DDRD diisi 0 jika ingin memfungsikan pin-pin port D yang bersesuaian sebagai input atau diisi 1 jika sebagai output. Selain itu pin-pin port D juga memiliki fungsi untuk alternatif khusus seperti yang dapat dilihat dalam tabel 2.2 berikut :
Tabel 2.2 Fungsi Alternatif Port D
Port Pin Fungsi Khusus
PD0 RDX ( UART input line ) PD1 TDX ( UART output line ) PD2 INT0 ( external interrupt 0 input ) PD3 INT1 ( external interrupt 1 input )
PD4 OC1B ( timer/counter 1 output compare B match PD5 OC1A ( timer/counter 1 output compare A match PD6 ICP ( timer/counter 1 input capture pin )
PD7 OC2 (timer/counter 2 output compare match output
5. RESET
6. XTAL1
XTAL1 adalah masukan ke inverting oscilator amplifier dan input ke internal clock operating circuit.
7. XTAL2
XTAL2 adalah output dari inverting oscilator amplifier. 8. Avcc
Avcc adalah kaki masukan tegangan bagi A/D converter. Kaki ini harus secara eksternal terhubung ke Vcc melalui lowpass filter.
9. AREF
AREF adalah kaki masukan referensi bagi A/D Converter. Untuk operasional ADC, suatu level tegangan antara AGND dan Avcc harus diberikan kaki ini.
10.AGND
AGND adalah kaki untuk analog ground. Hubungkan kaki ini ke GND, kecuali jika board memiliki analog ground yang terpisah.
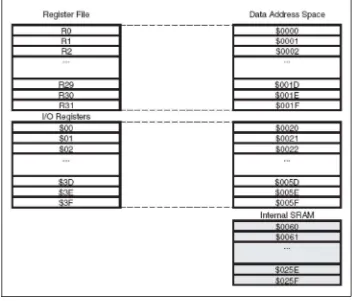
2.2.2 Peta Memori Mikrokontroler ATMega 8535
AVR ATMega 8535 memiliki ruang pengalamatan memori data dan memori program yang terpisah. Memori data terbagi menjadi 3 bagian yaitu 32 buah register umum, 64 buah register I/O dan 512 byte SRAM internal.
mengatur fungsi terhadap berbagai peripheral mikrokontroler, seperti contoh register, timer/counter, fungsi-fungsi I/O dan sebagainya.
Alamat memori berikutnya digunakan untuk SRAM 512 byte yaitu pada lokasi $60 sampai $25F. Konfigurasi memori data pada ATMega 8535 di tunjukkan pada gambar 2.5.
Gambar 2.5 Peta Memori Mikrokontroler ATMega 8535
Memori program yang terletak dalam flash Perom tersusun dalam word atau 2 byte karena setiap interuksi memiliki lebar 16-bit atau 32-bit, AVR ATMega 8535 memiliki Kbyte 12-bit program counter (PC) sehingga mampu mengalamati isi flash. Selain itu AVR ATMega 8535 juga memiliki memori data berupa EEPROM 8-bit sebanyak 512 byte. Alamat EEPROM dimulai $000 sampai $1FF. Di bawah ini adalah memori program AVR ATMega 8535.
2.3 Sistem Minimum ( Minimum System)
Sistem minimum (sismin) mikrokontroller adalah rangkaian elektronika minimum yang diperlukan untuk beroperasinya IC mikrokontroler. Sismin ini kemudian bisa dihubungkan dengan rangkaian lain untuk menjalanankan fungsi tertentu. Di keluarga mikrokontroller AVR seri 8535 adalah salah satu seri yang banyak digunakan.
Untuk membuat rangkaian sismin ATMega 8535 diperlukan beberapa komponen antara lain :
1. IC mikrokontroler ATMega 8535. 2. 1 XTAL 4 Mhz atau 8 Mhz (XTAL1).
3. 3 kapasitor kertas yaitu dua 22 pF (C2 dan C3) serta 100 nF (C4). 4. 1 kapasitor elektrolit 4,7 uF (C12) 2 resistor yaitu 100 Ω (R1) dan 10
KΩ (R3).
5. 1 tombol reset push button (PB1).
Selain itu tentunya diperlukan sumber tegangan yang bisa memberikan tegangan 5V DC. Rangkaian sistem minimum ini sudah siap untuk menerima sinyal analog (fasilitas ADC) di port A. Di bawah ini adalah sistem minimum ATMega 8535.
Dari gambar 2.6 dapat dilihat bahwa suatu system minimum memiliki 4 port 8 pin yang masing-masing portnya memiliki fungsi khusus dimana pembagiannya.
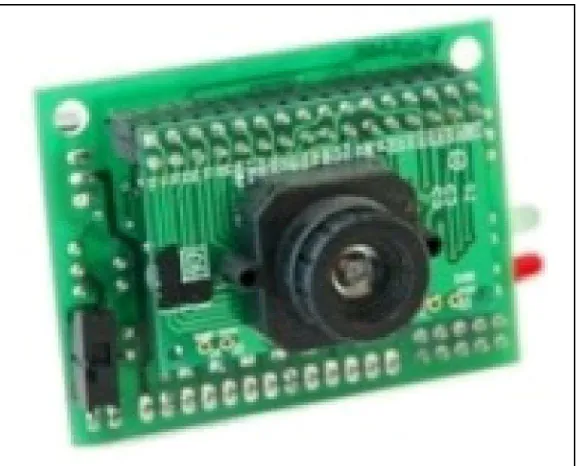
2.4 CMU Camera Sebagai Sensor
CMUCam terdiri dari SX52 mikrokontroler dengan antarmuka OV6620 atau OV7620 Omnivision CMOS camera dalam sebuah Chip. Modul komunikasi menggunakan RS-232 atau TTL serial port. Pergerakan dengan gambar yang berbeda 26 gambar per detik. Jenis kamera ini yang sering dijumpai pada robotika. Memiliki resolusi samapai dengan 160 x 255. Dapat mengontrol servo sebanyak 5 buah. Analog Video Output (Dapat di tampilkan ke dalam televisi). Supports Multiple Baudrates 115200, 57600, 38400, 19200, 9600, 4800, 2400, 1200.
Fitur dari CMUCam : - Ukuran array : 664x492 pixels. - Ukuran pixel : 7.6 x 7.6 µm. - Scanning : Progressive / Interlace.
- Area gambar yang aktif : 4.86 x 3.64 mm. - Electronic Exposure : 500:1.
- Gamma correction : 128 curve settings. - S/N ratio : >48 dB.
- Min Illumination : 2.5 flux @ F1.4. - Operating voltage : 5 Volt DC.
Fungsi dari CMUCam :
- Melacak bercak warna yang di tentukan pada kecepatan 17 frame per detik.
- Mengatur parameter kamera. - Menangkap gambar.
- Resolusi 160 x 255 pixels
Konfigurasi yang paling umum pada kamera CMUCam di hubungkan melalui prosesor lain melalui komunikasi serial RS232. Prosesor ini bisa berupa computer atau mikrokontroler. CMUCam menggunakan daya kecil sehingga bisa digunakan untuk menambah system visual. ( ke sistem kecil yang tidak mempunyai daya besar ). Protocol komunikasinya di rancang untuk mengakomodasi prosesor yang lambat. Bila device tidak mempunyai komunikasi serial RS232 bisa juga di lakukan dengan komunikasi serial pada level TTL.
Berikut adalah gambar fisik dari kamera CMUCam :
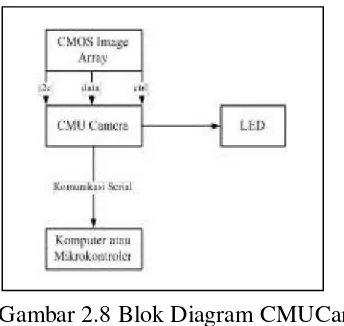
Dari gambar 2.7 dapat di tuliskan cara kerja proses CMUCam tersebut adalah sebagai berikut :
Gambar 2.8 Blok Diagram CMUCam
Kamera CMUCam bisa berkomunikasi melalui port serial dengan level tegangan TTL ataupun RS232 untuk mengirimkan perintah dan mengambil data dari CMUCam.
2.5 Motor DC Sebagai Aktuator Roda
Struktur robot sebagian besar dibangun berdasarkan konstruksi mekanik. Sebagian besar kontruksinya memiliki aktuator yang bermacam-macam. Salah satu aktuator yang sering digunakan ialah motor DC magnet permanen.
Motor DC ialah salah satu peralatan elektronika dasar yang berfungsi untuk mengubah tenaga listrik menjadi tenaga mekanik. Motor DC magnet permanen merupakan motor DC yang dirancang agar bekerja dalam tegangan sumber DC. Umumnya motor DC bekerja antara 6-12 Volt. Diluar itu motor DC bekerja antara 24 Volt hingga lebih.
tersebut akan menciptakan medan magnet yang arahnya berlawanan di sekitar magnet. Jadi motor dapat berputar.
Ketika kumparan diberi tegangan, medan magnet akan timbul di sekeliling armature. Sisi kiri armature akan terdorong dari magnet sebelah kiri menuju ke sebelah kanan sehingga tercipta putaran. Ketika armature menjadi sejajar dengan magnet, commutator akan mengembalikan arah arus di dalam kumparan, sehingga membalikkan medan magnet. Hal tersebut akan membuat armature kembali berputar dari sebelah kiri ke sebelah kanan magnet. Di bawah ini gambar dari motor DC yang digunakan sebagai aktuator. Motor DC yang digunakan pada robot lengan ada 3 buah yaitu 2 buah motor DC dengan gearbox dan sebuah motor wiper.
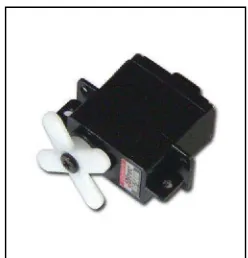
2.6 Motor Servo Standart Sebagai Pengendali CMUCam
Penggunaan motor servo standart difungsikan untuk pengaturan arah kamera, sehingga saat terdapat bola di sekitarnya robot dapat menangkapnya. Motor servo adalah sebuah motor dengan sistem umpan balik tertutup di mana posisi dari motor akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam motor servo. Motor ini terdiri dari sebuah motor DC, serangkaian gear, potensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan batas sudut dari putaran servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor.
medan magnit. Salah satu medan dihasilkan oleh magnit permanent dan yang satunya dihasilkan oleh arus yang mengalir dalam kumparan motor. Resultan dari dua medan magnit tersebut menghasilkan torsi yang membangkitkan putaran motor tersebut. Saat motor berputar, arus pada kumparan motor menghasilkan torsi yang nilainya konstan.
Secara umum terdapat 2 jenis motor servo. Yaitu motor servo standard dan motor servo Continous. Servo motor tipe standar hanya mampu berputar 180 derajat. Motor servo standard sering dipakai pada sistim robotika misalnya untuk membuat “ Robot Arm” ( Robot Lengan ). sedangkan Servo motor continuous dapat berputar sebesar 360 derajat. motor servo Continous sering dipakai untuk Mobile Robot. Pada badan servo tertulis tipe servo yang bersangkutan.
Motor servo merupakan sebuah motor dc kecil yang diberi sistim gear dan potensiometer sehingga dia dapat menempatkan “horn” servo pada posisi yang dikehendaki. Karena motor ini menggunakan sistim close loop sehingga posisi “horn” yang dikehendaki bisa dipertahanakan. “Horn” pada servo ada dua jenis. Yaitu Horn “ X” dan Horn berbentuk bulat.
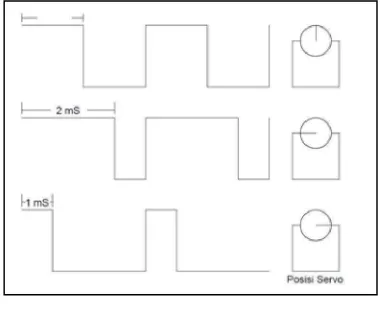
system lebar pulsa untuk mengemudikan putaran motor. Sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor. Tampak pada gambar dengan pulsa 1.5 mS pada periode selebar 2 mS maka sudut dari sumbu motor akan berada pada posisi tengah. Semakin lebar pulsa OFF maka akan semakin besar gerakan sumbu ke arah jarum jam dan semakin kecil pulsa OFF maka akan semakin besar gerakan sumbu ke arah yang berlawanan dengan jarum jam.
Gambar 2.11 Cara Kerja Servo
Untuk menggerakkan motor servo ke kanan atau ke kiri, tergantung dari nilai delay yang kita berikan. Untuk membuat servo pada posisi center, berikan pulsa 1.5ms. Untuk memutar servo ke kanan, berikan pulsa <=1.3ms, dan pulsa >= 1.7ms untuk berputar ke kiri dengan delay 20ms.
Sumber : http://akbarulhuda.wordpress.com/2010/04/01/mengenal-motor-servo/
2.7 Roda Gigi ( Gear )
relative tinggi yang hal ini tidak sesuai bila porosnya dihubungkan langsung ke sendi gerak atau roda. Sebab kebanyakan gerakan yang diperlukan pada sisi anggota badan robot adalah relative pelan namun bertenaga. Untuk mencapa hal itu maka sangat diperlukan sistem roda gigi (gear) yang sesuai, dan pada tugas akhir ini menggunakan posisi gear medium.
2.8 Pemr ograman Bahasa C
Akar dari bahasa C adalah bahasa BCPL yang dikembangkan oleh Martin Richard pada tahun 1967. Bahasa ini memberkan ide kepada ken thompson yang kemudian mengembangkan bahasa yang disebut dengan B pada tahun 1970. Perkembangan selanjutnya dari bahasa B adalah bahasa C oleh Dennis Ricthie sekitar tahun 1970-an di Bell Telephone Laboratories Inc. ( sekarang adalah AT&T Bell Laboratories).
Kepopuleran bahasa C membuat versi-versi dari bahasa ini banyak dibuat untuk komputer mikro. Untuk membuat versi-versi tersebut standar, ANSI
(American National Standards Institute) kemudian menetapkan standar ANSI untuk bahasa C. Standar ANSI ini didasarkan dari standar UNIX yang diperluas. Standar ANSI menetapkan sebanyak 32 buah kata-kata kunci (keyword) standar. Ke 32 kata kunci ini adalah :
Table 2.3 Kata Kunci (Keyword) Pada bahasa C
2.8.1 Alasan Menggunakan Bahasa C
Beberapa alasan dapat dicatat mengapa bahasa C banyak digunakan, diantaranya adalah sebagai berikut :
1. Bahasa C tersedia hampir disemua jenis computer.
2. Kode bahasa C sifatnya adalah portable. Aplikasi yang ditulis dengan bahasa C untuk suatu computer tertentu dapat digunakan di computer lain hanya dengan sedikit modifikasi.
3. Bahasa C hanya menyediakan sedikit kata-kata kunci. 4. Proses executable program bahasa C lebih cepat.
5. Dukungan pustaka yang banyak, kehandalan bahasa C dicapai dengan adanya fungsi-fungsi pustaka.
6. C adalah bahasa terstruktur.
7. Selain bahasa tingkat tinggi, C juga dianggap sebagai bahasa tingkat menengah.
8. Bahasa C adalah compiler, karena C sifatnya adalah compiler, maka akan menghasilkan executable program yang banyak dibutuhkan oleh program-program komersial.
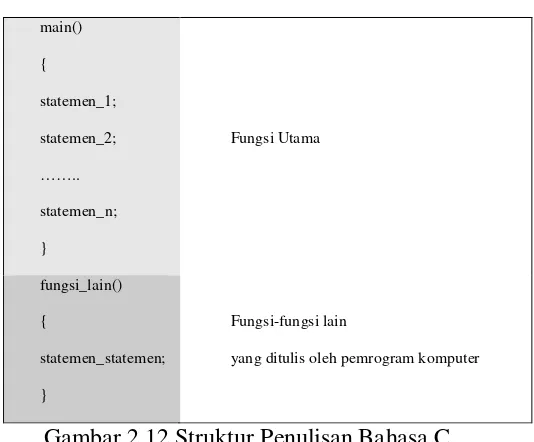
2.8.2 Struktur Penulisan Bahasa C
Untuk dapat memahami bagaimana suatu program ditulis, maka struktur dari program harus dimengerti terlebih dahulu, atau sebagai pedoman penulis program.
ditentukan namanya, yaitu fungsi main(). Artinya program C minimal memiliki satu fungsi (fungsi main()). Berikut ini adalah struktur dari program C.
main()
yang ditulis oleh pemrogram komputer
Gambar 2.12 Struktur Penulisan Bahasa C
Pada gambar 2.12 merupakan struktur penulisan bahasa C dengan keterangan sebagai berikut :
1. Dimulai dari tanda { hingga tanda } disebut tubuh fungsi/blok.
2. Tanda () digunakan untuk menggapit argument fungsi, yaitu nilai yang dilewatkan ke fungsi. Pada fungsi main() tidak ada argument yang diberikan, maka tidak ada entri di dalam ().
3. Kata void menyatakan bahwa fungsi ini tidak memiliki nilai balik. 4. Tanda { menyatakan awal eksekusi program dan tanda } menyatakan
akhir eksekusi program.
5. Di dalam tanda { } bisa tergantung sejumlah unit yang disebut pernyataan (statment). Umumnya pernyataan berupa instruksi untuk :
• Memerintah computer melakukan proses menampilkan string ke layar.
29
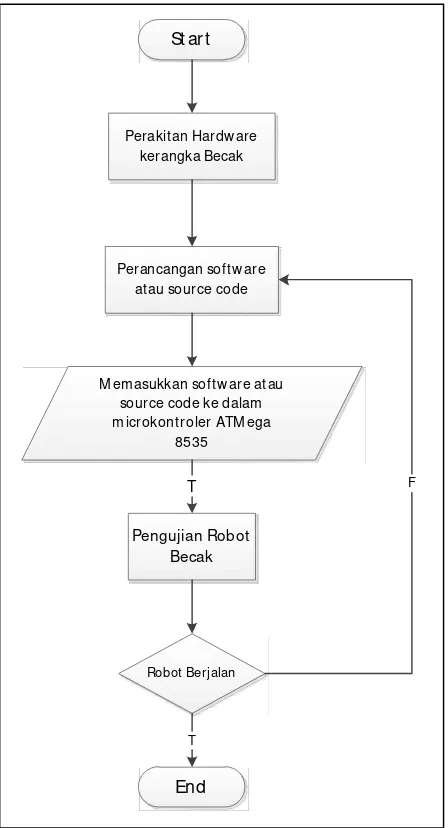
Pada bab ini dibahas mengenai beberapa hal dasar tentang bagaimana penganalisaan sebuah system perangkat keras maupun perangkat lunak, cara perancangan robot, serta komponen-komponen apa saja yang dibutuhkan dalam perancangan robot. Di bawah ini adalah gambar flowchart 3.1 yang akan di rancang pada robaot becak yang dibuat :
Perakitan Hardw are kerangka Becak
Perancangan soft w are at au source code
M emasukkan softw are at au source code ke dalam
Pada bagian perakitan Hardware sebuah robot tersebut membutuhkan
3. Kamera CMUCam versi 1. 4. Mickro servo SG 90.
Setelah di lakukan sebuah perakitan pada robot becak tersebut maka akan di lakukan perakitan software atau perancangan source code. Dimana pada bagian ini membutuhkan sebuah software Code Vision AVR 4.
Semua perakitan Hardware dan pembuatan Software atau source code adalah tahapan memasukkan source code tersebut pada microkontroler ATMega 8535.
Gambar 3.2 Blok Diagram Sistem
Dari blok diagram pada gambar 3.2 dapat dikatakan bahwa sebuah robot terdiri dari gabungan beberapa perangkat dan mekanik, yang saling terhubung antara perangkat yang satu dengan perangkat yang lainya. Sebuah perangkat keras juga tidak berarti bila tidak terdapat system yang memerintahkannya untuk melakukan suatu aktifitas. Sehingga dibutuhkan sebuah mikrokontroller yang dapat memberi intruksi ke seluruh perangkat I/O.
Dalam pembuatan robot ini penulis memperhatikan beberapa aspek yang dibutuhkan, yaitu :
a. Robot ini dirancang dengan menggunakan sensor CMUCam sebagai pendeteksi adanya benda berwarna di depan robot tersebut.
b. Robot ini dirancang dengan menggunakan Mikrokontroller ATMega8535 sebagai otak atau pengendali utama pada robot.
c. Robot ini menggunakan Bahasa C sebagai Bahasa pemrogramannya. d. Robot ini dirancang untuk dapat berjalan secara otomatis dengan
f. Robot ini menggunakan sebuah motor DC sebagai penggerak roda belakang dan tower pro mikro servo SG90 standart sebagai penggerak kemudi.
Untuk lebih memperjelas paparan diatas, maka akan di bahas pada sub bab berikut ini.
3.1 Sistem Perangkat Keras
Pada sub bab ini akan dijelaskan bagaimana sebuah perangkat keras robot dibuat. Serta membuat sistem perangkat lunaknya. Sehingga dapat berjalan sesuai aturan yang dibuat.
3.1.1 Analisa Per angkat Keras
Pada sub-bab ini akan dijelaskan tentang pembangunan suatu robot becak yang dirancang memiliki dua roda belakang dengan menggunakan motor dan satu roda depan menggunakan servo sebagai penggerak robot dan memiliki sensor kamera jenis CMUCam sebagai pendeteksi adanya benda berwarna yang ada di depan robot tersebut, pada waktu jalan maka robot tersebut akan menghampiri benda berwarna secara otomatis.
memiliki sebuah tower pro micro servo SG90 standart sebagai penggerak depan dan motor DC sebagai penggerak belakang sebagai penggerak roda robot, sensor kamera CMUCam sebagai pendeteksi adanya benda berwarna, baterai RC sebagai sumber tegangan dimana baterai RC tersebut mempunyai tegangan 7,4V dengan arus sebesar 1100 mA.
3.1.2 Kebutuhan Perangkat Keras
Membuat robot becak ini dubutuhkan beberapa perangkat keras yang dapat mendukung pembuatan sebuah robot becak. Pada sub bab ini akan dilakukan perincian terhadap apa saja perangkat keras yang dibutuhkan.
Dalam merancang suatu system hardware maka perlu menentukan jenis dan spesifikasi perangkat keras yang sesuai dengan kebutuhan. Hal ini adalah persiapan awal yang harus dilakukan. Dimana tiap hardware yang digunakan memiliki spesifikasi yang berbeda-beda.
Berikut ini perangkat keras yang dibutuhkan untuk membuat sebuah robot becak antara lain :
1. Sebuah mikrokontroler ATmega 8535. 2. Sebuah kamera CMUCam versi 1. 3. Motor DC.
4. Servo standart dengan torsi 0.79 Kg
5. PCB (Printed Circuit Board) untuk membuat minimal system, rangkaian regulator serta rangkaian motor driver.
6. Kerangka becak.
Sebelum menggunakan semua perangkat diatas, ada baiknya dilakukan pengecekan kinerja masing-masing komponen. Hal ini bertujuan untuk mempermudah dalam pembuatan perangkat keras robot becak.
3.1.3 Perancangan Perangkat Keras
Pada tugas akhir kali ini membutuhkan perangkat keras sebagai wujud implementasi dari analisa pembuatan hardware.
Seperti yang dijelaskan pada bab sebelumnya. Banyak jenis robot yang telah ada di Indonesia ini. Namun dalam memenuhi Tugas Akhir ini dipilihlah desain robot becak yang belum pernah dibuat sebelumnya.
Gambar 3.3 Rancangan Robot Becak
Dari rancangan robot becak seperti pada Gambar 3.3 di atas. bahwa robot becak tersebut mempunyai sensor kamera yang berfungsi sebagai pendeteksi adanya benda berwarna pada saat robot berjalan maka secara otomatis servo yang sudah dikaitkan dengan kemudi, akan membelokkan kemudi baik ke kanan atau ke kiri. Gambar 3.4 berikut adalah rancang robot becak dari bawah :
Gambar 3.4 Rancangan Robot Becak dari Bawah
Pada Gambar 3.4 diatas, rancangan di bagian bawah terdapat motor DC yang berguna sebagai penggerak roda belakang, dan dapat terlihat motor DC yang telah terpasang dengan roda gila (gear box), dimana roda gila ini akan membantu meningkatkan torsi dari motor DC, sehingga dapat menggerakkan robot.
Digunakannya motor DC dikarenakan motor ini harganya relatif murah dan torsinya cukup tinggi, untuk mengendalikan putarannya dapat diatur dengan menggunakan rangkaian motor driver dengan memanfaatkan IC L293D. Dimana IC ini dapat dilalui arus sebesar 1 ampere, selain itu IC type L293D harganya relative murah dibandingkan menggunakan type L298D.
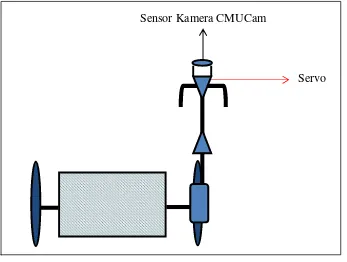
3.1.4 Perancangan Badan Robot Becak
Seperti yang sudah dijelaskan pada poin Gambar 3.2 dan Gambar 3.3 pada bab ini, telah dipilih jenis robot roda yang memiliki tiga roda dan sebuah servo
Servo Sensor Kamera CMUCam
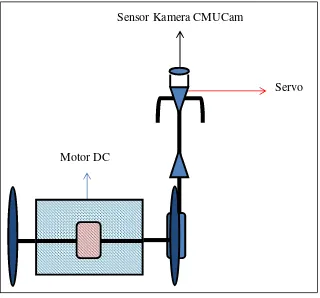
sebagai penggerak kemudi depan dan motor DC sebagai pengerak roda belakang. Dalam perancangan badan robot, telah di pilih rancangan seperti pada Gambar 3.5 berikut :
Gambar 3.5 Robot Becak Tampak Samping
Pada Gambar 3.5 merupakan tampilan rangkaian roda robot becak yang dilihat dari samping. Robot tersebut sebagai penggerak roda belakang menggunakan motor DC yang dipasang dibawah minimal sistem, dan kemudi robot menggunakan servo yang dipasang pada setir becak tersebut sedangkan sensor kamera dipasang didepan setir kemudi hal ini dilakukan supaya sensor kamera tidak terhalang dan tidak terpengaruh oleh kemudi.
Pada gambar 3.6 di bawah adalah skema robot becak yang sudah dirangkai sebelum pembuatan robot becak tersebut :
Servo
Gambar 3.6 Jarak CMUCam Robot
Pada Gambar 3.6 skema robot tersebut terlihat dari samping. Dan sensor kamera tersebut yang ada pada robot becak tersebut mempunyai jarak 5 cm dari lantai yang terletak di bagian setir yang sudah dibuatkan dudukan untuk sensor kamera CMUCam.
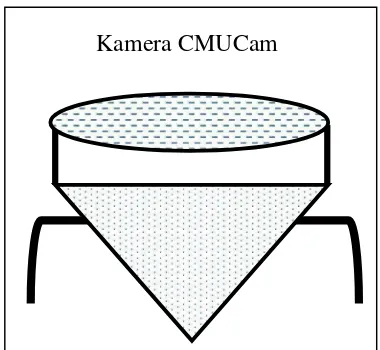
Seperti yang telah dirancang sebelumnya, sensor kamera yang akan dipasang dirobot becak harus dapat mendeteksi adanya benda berwarna yang ada di depannya. Maka dari itu berhubung becak yang akan sudah dirancang memerlukan tempat untuk pemasangan sensor kamera maka diperlukan dudukan yang akan dipasang di bagian setir dengan bahan plat besi agar bisa kuat dipasang dibecak tersebut. Seperti pada gambar 3.7.
Gambar 3.7 Dudukan Sensor Kamera Kamera CMUCam
Pada Gambar 3.7 telah ditunjukkan bahwa sensor kamera tersambung dengan servo. Jadi jika ada benda berwarna disamping kanan atau kiri bisa dideteksi oleh sensor kamera dengan menggunakan penggerakan dari servo.
Untuk mengendalikan kemudi robot, maka motor servo dikaitkan ke kemudi dengan kawat , agar saat sensor mendeteksi adanya benda datar warna kuning di depan kamera maka kemudi dapat mengarahkan pada objek dengan baik. Untuk memperjelas pemahaman, maka dibawah ini adalah rancangan servo terhadap kemudi.
Gambar 3.8 Pengait Servo
Seperti dilihat Gambar 3.8 pengait dan dudukan pengait sangatlah penting untuk proses pendeteksian objek robot becak tersebut. maka dari itu setir harus diberikan dudukan pengait dari servo ke setir agar jika sensor kamera mendeteksi adanya objek benda berwarna maka servo akan bergerak ke arah benda tersebut maka setir akan mengikuti arah belok servo tersebut.
Dalam mendesain kemudi harus benar-benar baik, karena bila terjadi kemiringan pada kemudi maka robot tidak dapat berjalan lurus saat servo pada posisi center. Selain itu kait yang dipasang pada sumbu putar kemudi harus dapat bergerak secara bebas.
3.2 Sistem Perangkat Lunak
Perangkat lunak yang dibutuhkan untuk membuat suatu system utuh menggunakan bahasa C dengan editor Code Vision AVR.
Penggunaan bahasa C bertujuan untuk mempermudah proses pemrograman dibandingkan jika menggunakan bahasa assembler, pemrograman dengan bahasa C lebih mudah dibaca dan dimengerti. Karena bahasa C lebih mendekatakan menggunakan bahasa verbal.
Sedangkan penggunaan Code Vision AVR sebagai editor adalah kemudahannya memanajement berkas dan proyek dalam sebuah IDE serta fitur CodeWizard yang membantu menghasilkan rentetan baris kode untuk keperluan umum.
3.2.1 Analisa Per angkat Lunak
Gambar 3.9 Ilustrasi Gerak Robot Terhadap Objek Benda Berwarna
Bila sensor kamera CMUCam pada jarak 5 cm – 10 cm robot mendeteksi adanya objek benda berwarna di depan sensor kamera maka robot akan bergerak menghampiri objek benda tersebut. Apabila objek benda ada di sebelah kanan atau kiri, ketika sensor kamera berada lurus di depan maka servo akan membatu pergerakan dari sensor kamera untuk menemukan objek benda tersebut. Prosedur ini akan dilakukan oleh robot selama kondisi sensor masih mendeteksi keberadaan objek benda berwarna.
Dari penjelasan di atas dapat di simpulkan bahwa kamera CMUCam dapat mendeteksi objek benda berwarna dalam radius 5 cm – 10 cm. Kamera CMUCam tersebut melakukan proses image processing dan hanya bisa mendeteksi adanya objek benda berwarna.
3.2.2 Perancangan Perangkat Lunak
Robot becak ini dibuat untuk dapat bergerak secara otomatis, dan sebagai acuan arah menggunakan sensor kamera CMUCam yang dipasang di depan stir
Kamera CMUCam
SERVO Pengait Objek Benda Berwarna
kemudi becak tersebut, yang bertujuan supaya robot dapat mendeteksi keberadaan objek benda berwarna di depan dan dapat bereaksi dengan baik.
Sebelum mendesain perangkat lunak pada robot becak tersebut maka yang harus di lakukan pertama kali adalah mendesain flowchart terlebih dahulu supaya untuk mempermudah mengetahui alur kerja dari sistem robot becak yang buat. Gambar 3.10 berikut adalah penjelasan dalam bentuk Flowchart untuk masalah Reaksi Kerja Robot Becak.
Pada Gambar 3.10 dapat dijelaskan alur kerja system dari roboot becak, ketika switch mengarah pada mode otomatis, maka semua perangkat I/O pada kondisi siap, dengan ditandai lampu Indikator pada minimal system menyala kemudian robot akan bergerak. Jika jarak sensor depan lebih dari 10 cm maka robot bergerak maju. Bilamana sensor mendeteksi jarak kurang dari 5 cm maka putaran roda pelan, kemudian sensor melakukan scaning. CMUCam tersebut akan mendeteksi objek yang ada di depanya setelah mendapat data yang sesudah di imputkan. Kemudian akan memproses objek tersebut dan mendekati objek tersebut. Alur tersebut akan dieksekusi berulang-ulang hingga switch pada posisi off.
44
Pada bab ini akan membahas tentang Implementasi Pembuatan Robot Becak dari hasil analisa dan perancangan sistem yang ada pada bab III, serta bagaimana cara sistem robot dan jalannya robot tersebut. Dalam hal ini, seperti yang telah dijelaskan di bab-bab sebelumnya, robot yang dikerjakan yaitu robot berjenis robot beroda yang memiliki kelebihan dan memiliki fungsi sebagai robot pendeteksi dengan adanya benda berwarna di depan robot. Untuk lebih lanjut dapat dijelaskan pada sub bab sebagai berikut :
4.1 Perakitan Robot
Perakitan badan robot yang dijabarkan sesuai dengan jalur dan rancangan yang akan dibuat sebagai mikro robot becak dan rancangannya di jelaskan pada gambar 4.1 sebagai berikut :
Perakitan PCB (PrintedCircuit Board)
Gambar 4.2 Bagian Atas PCB Robot Becak
Berikut penjelasan PCB robot becak yang sudah dirakit sebagai penggerak robot becak tersebut :
1. Port A
Port A digunakan sebagai jalur pengerak motor DC yang terpasang pada robot becak. Pin yang di gunakan pada Port A adalah Pin A0 dan Pin A7 sebagai H BRIDGE Relay.
2. Port B
• MOSI terdapat di Pin B5. • MISO terdapat di Pin B6. • SCK terdapat di Pin B7. 3. Port C
Port C pin yang digunakan adalah C0 sebagai GND dan C1 sebagai VCC mode pada switch.
4. Port D
Port D digunakan untuk keperluan I/O pada CMUCam. Konfigurasi pinnya antara lain adalah :
• Pin D0 sebagai TX CAM. • Pin D1 sebagai RX CAM. • Pin D7 sebagai Signal Servo. 5. Mikrokontroller ATMega 8535.
6. Regulator berfungsi sebagai penstabil tegangan yang masuk ke minimal sistem.
7. Terminal.
8. Lampu Led Start.
9. Lampu Led Downloader. 10.Tombol Reset.
Gambar 4.3 Fisik dari PCB Robot Becak
Pada Gambar 4.1 merupakan Rangkaian Robot becak dari bawah atau jalur PCB yang sudah dirangkai sebelum perakitan robot tersebut. Untuk rancangan atau desain bagian atas dari PCB Robot becak di tunjukkan pada Gambar 4.2. Dan penjelasan dari bagian-bagian componen PCB Robot becak. Sedangkan gambar 4.3 adalah rangkaian fisik dari PCB robot becat yang telah di buat.
4.1.1 Schematic CMUCam
Gambar 4.4 PCB CMUCam
1. Power
Daya input listrik yang di perlukan ke CMUCam adalah 5 volt. Terdapat regulator pada PCB CMUCam tersebut yang berfungsi meminimalisasi daya input listrik. Ketika daya listrik yang di masukkan adalah 10 volt maka regulator akan meminimalisasikan daya listrik tersebut. Power switch di PCB CMUCam yang berfungsi sebagai on/off pada CMUCam.
2. Servo Port
Berfungsi sebagai akuator pengendali ketika kamera bergerak mencari sebuah benda berwarna maka servo akan mengikuti arah gerak dari kamera tersebut.
3. TTL Port Serial ( komunikasi antar port )
Port serial ke serial I / O sebelum di proses ke chip MAX232. Port ini dapat komunikasi dengan mikrokontroler.
4. Camera Bus
Camera bus berfungsi sebagai port yang menghubungkan dengan SX28. SX28 adalah sebuah mikrokontroler yang ada pada kamera CMUCam.
• 14 HREF Horizontal Window Reference • 15 AGND Analog Ground
• 16 VSYN Vertical Sync • 17 AGND Analog Ground • 18 PCLK Pixel Clock • 19 EXCLK External Clock
• 20 VCC +5 VDC
• 21 AGND Analog Ground
• 22 VCC +5 VDC
• 23-30 UV0-UV7 Digital output UV bus
• 31 GND Common Ground
• 32 VTO Video analog (75 Ohm) 5. Programming Switch
Programming Switch berfungsi sebagai transfer program yang ada di PC ke mikrokontroler yang ada di PCB kamera CMUCam.
4.2 Pemasangan Software
Sebelum program di buat dan dimasukkan ke dalam chip robot, ada beberapa cara yang harus dilakukan, yaitu pemasangan software Code Vision AVR
untuk membuat code robot, dan untuk memasukkan code robot yang di buat ke dalam mikrokontroller ATMega8535. AVR Studio 4 sebenarnya bisa digunakan untuk membuat program, tetapi dalam hal ini, agar lebih memudahkan dalam pembuatan program atau code robot, di pilihlah Software Code Vision AVR untuk membuat program dengan bahasa C dan untuk memudahkan dalam proses pemasukkan program ke dalam mikrokontroller ATMega8535, di pilihlah Software Code Vision AVR. Penjelasan lebih lengkap sebagai berikut :
Install terlebih dahulu aplikasi Code Vision AVR, klik dua kali setup.exe
pada Komputer atau Notebook, seperti pada Gambar 4.7 setelah itu maka akan keluar pilihan bahasa seperti pada Gambar 4.8 :
Gambar 4.7 Langkah 1 Menginstall Progam Code Vision AVR
Klik OK , maka keluar seperti Gambar 4.9
Gambar 4.9 Langkah 3 Menginstall Progam Code Vision AVR
Gambar 4.10 Langkah 4 Menginstall Progam Code Vision AVR
Gambar 4.11 Langkah 5 Menginstall Progam Code Vision AVR
Gambar 4.12 Langkah 6 Menginstall Program Code Vision AVR
Gambar 4.14 Langkah 8 Menginstall Progam Code Vision AVR
Setelah langkah ke 6 pada Gambar 4.12 start menu folder disimpan, kemudian klik next, kemudian klik install pada Gambar 4.13 maka akan memproses penginstallan seperti pada Gambar 4.14.
Gambar 4.15 Langkah 9 Menginstall Progam Code Vision AVR
Setelah tahap telah selesai maka selanjutnya adalah pembuatan program dengan menggunakan Code Vision AVR. Langkah pertama yaitu membuat project, seperti yang dicontohkan pada Gambar 4.16 dan Gambar 4.17.
Gambar 4.16 Membuat Halaman Baru dengan Code Vision AVR
Gambar 4.17 Pilihan Type File dengan Code Vision AVR
Gambar 4.18 Konfigurasi Type Chip dengan Code Vision AVR
Pada kolom chip yang dipilih ATmega 8535, karena mikrokontroler yang akan gunakan pada tugas akhir kali ini menggunakan ATmega 8535. Kemudian pada kolom clock yang dipilih 11.059.200MHz pada kolom program type yang dipilih application, karena program yang dibuat akan menjadi sebuah aplikasi.
Dari Gambar 4.19 dapat dipaparkan fungsi masing-masing port yang akan digunakan. Sebagai konektor antara minimal sistem dengan perangkat I/O. di bawah ini penjelasannya :
• Gambar 4.19 (a) adalah konfigurasi untuk port A dimana pembagian pin sebagai berikut :
Port A
Port A digunakan sebagai jalur pengerak motor DC yang terpasang pada robot becak. Pin yang di gunakan pada Port A adalah Pin A0 dan Pin A7 sebagai H BRIDGE Relay.
• Gambar 4.19 (b) adalah konfigurasi untuk port B : Port B
Port B digunakan sebagai AVR ISP, yang berfungsi sebagai port masukknya program yang akan buat ke dalam mikrokontroler. Pin yang di gunakan pada Port B :
• MOSI terdapat di Pin B5. • MISO terdapat di Pin B6. • SCK terdapat di Pin B7.
• Gambar 4.19 (c) adalah konfigurasi untuk port C. Port C
• Gambar 4.19 (d) adalah konfigurasi untuk port D. Port D
Port D digunakan untuk keperluan I/O pada CMUCam. Konfigurasi pinnya antara lain adalah :
• Pin D0 sebagai TX CAM. • Pin D1 sebagai RX CAM. • Pin D7 sebagai Signal Servo.
Setelah konfigurasi port sudah selesai, langkah selanjutnya melakukan konfigurasi pada port Timer berikut ini penjelasannya pada gambar 4.20.
Gambar 4.20 Konfigurasi Timers Pada Code Vision AVR
kemudian pada kolom mode berfungsi sebagai modus pengaturan yang akan digunakan.
Setelah melakukan konfigurasi melalui CodeWizardAVR maka langkah selanjutnya adalah malakukan generate pada konfigurasi yang telah dibuat. Berikut ini langkah melakukan proses generate yang di jelaskan pada gambar 2.1.
Gambar 4.21 Generate Konfigurasi dengan Code Vision AVR
Setelah proses generate, save and exite maka akan muncul halaman baru yang berisikan barisan potongan program yang akan dikembangkan.
Setelah mengklik OK seperti pada Gambar 4.17, maka akan keluar form untuk memilih dan menentukan deklarasi pada port robot seperti Gambar 4.19. Setelah pendeklarasian port robot selesai, pilih menu file Generate dan Save and Exit untuk menyimpan project, seperti pada Gambar 4.21. Dan selanjutnya akan keluar form untuk menyimpan file code program untuk robot, seperti pada Gambar 4.23.
Gambar 4.23 Menyimpan ProgamRobot dengan Code Vision AVR
Pada Gambar 4.22, merupakan tampilan awal untuk mengimplementasikan coding yang telah dibahas sebelumnya. Pada Gambar 4.24 dapat dilihat potongan coding deklarasi port yang secara instan terinput kedalam potongan coding yang akan dibuat, karena itu merupakan keunggulan dari Code Vision AVR, dimana deklarasi port-port tidak perlu ditulis lagi, karena pada awal pembuatan project, sudah ada pengaturan untuk deklarasi port yang selanjutnya akan terinput secara otomatis.
Setelah proses pengkodingan atau proses pembuatan program untuk robot selesai, selanjutnya adalah melakukan pemasangan coding yang telah dibuat kedalam mikrokontroller robot atau dengan kata lain mendownload program. Proses ini dapat dilakukan dengan dua mode yaitu menggunakan port pararel atau menggunakan port USB.
Bila menggunakan PC dengan fasilitas port pararel, pemrograman dapat dilakukan langsung menggunakan CodeVisionAVR. Sebelumnya dibuat dulu kabel downloader, untuk menghungkan port pararel ke PC dengan port SPI (Serial Peripheral Interface) pada mikrokontroler.
Namun pada tugas akhir ini menggunakan USB, maka harus dipakai peralatan downloader dengan port USB seperti AVRdoper, USP_Downloader dan lain-lain.
4.3. Implementasi coding
Pada tahapan ini akan dibahas menganai implementasi program yang telah dibuat untuk robot, dari perancangan robot yang telah dibuat sebelumnya. Langkah pertama yang harus dilakukan dalam pembuatan program adalah mendeklarasikan semua fungsi, delay perintah ke perintah yang lain, dan semua
port pada mikrokontroler yang digunakan sebagai input dan output dari program yang akan disusun. Berikut adalah potongan program yang merupakan penentuan
port pada mikrokontroller dalam membaca perintah sebelum masuk ke dalam perintah utama.
Port A digunakan sebagai jalur pengerak motor DC yang terpasang pada robot becak. Pin yang di gunakan pada Port A adalah Pin A0 dan Pin A7 sebagai H BRIDGE Relay.
Port B digunakan sebagai AVR ISP, yang berfungsi sebagai port masukknya program yang akan buat ke dalam mikrokontroler. Pin yang di gunakan pada Port B :
Port C pin yang digunakan adalah C0 sebagai GND dan C1 sebagai VCC mode pada switch.
Port D digunakan untuk keperluan I/O pada CMUCam. Konfigurasi pinnya antara lain adalah :
• Pin D0 sebagai TX CAM. • Pin D1 sebagai RX CAM. • Pin D7 sebagai Signal Servo.
Gambar 4.26 Potongan Source Code Servo
Potongan source code pada gambar 4.26 adalah source code untuk menggerakan motor servo, dari arah kanan lalu ke kiri.
void putar(int t unda) / / 250(CCW ) 650(0) 1050(CW)
/ / set ting nilai filt er RGB
lcd_putsf(“ w arna t erdet eksi” ); }
Gambar 4.27 Potongan Source Code Deteksi Objek
4.4 Implementasi Seluruh Robot
Setelah semua proses perakitan selesai dan program robot telah di inputkan, selanjutnya tekan tombol On/Off. Jika terjadi kesalahan dalam pemasangan, daya baterai atau yang lainnya, maka robot tidak akan bisa hidup atau menyala. Tetapi jika semua proses telah berhasil dengan sempurna, maka lampu robot akan menyala dan bergerak sesuai dengan jalan yang sudah diatur sebelumnya dan jika di depan terdapat benda berwarna, robot akan menghampiri benda tersebut dan apabila terdapat objek benda berwarna di sebelah kanan atau kiri maka setir akan membelok ke kanan dan ke kiri. Dan jika sensor kamera tidak menemukan objek benda berwarna maka sensor mencari objek benda tersebut. Dengan mengarahkan putaran dari sebelah kanan lalu ke kiri.
67
BAB V
UJ I COBA DAN EVALUASI
Pada bab ini akan dibahas mengenai pengujian dan analisa pada hardware yang telah dirancang. Tujuannya dari pengujian dan analisa ini adalah untuk mengetahui apakah hardware tersebut telah berfungsi dengan benar dan sesuai rencana atau tidak. Pengujian dan analisa ditunjukan pada pengujian komponen- komponen yang terdapat pada robot. Pengujian pertama dilakukan secara terpisah, dan kemudian dilakukan pengujian sistem secara keseluruhan. Yang harus di lakukan pengujian antara lain :
1. Sensor kamera CMUCam versi 1. 2. Motor DC.
3. Mikrokontroller ATMega 8535. 4. Servo standart.
5. Objek Benda berwarna.
5.1 Pengujian Sensor Kamera CMUCam
Pada tahap ini dilakukan pengujian terhadap sensor kamera CMUCam. Pengujian yang dilakukkan meliputi pengukuran jarak dan sudut elevasi. Setelah berbagai ujicoba tentang sensitifitas dari sensor kamera CMUCam, maka dapat di simpulkan bahwa objek benda berwarna di depan robot akan terdeteksi bahwa sensor kamera tersebut mempunyai fungsi untuk mendeteksi adanya objek benda berwarna. Dan jika sensor kemera tersebut menemukan adanya objek benda berwarna di sebelah kanan atau kiri maka secara otomatis servo yang ada pada setir robot becak akan membelokkan stir tersebut.
Pengujian sensor kamera CMUCam yang telah dipasang dirobot becak, yang sudah dibuat di dalam program maka jarak antara sensor kamera CMUCam ke objek benda adalah minimal 5 cm dan maksimal 10 cm. Dan jika robot tersebut sudah mencapai jarak minmal dan maksimal maka robot akan menghampiri objek benda berwarna tersebut.
5.1.1 Pengukuran J arak
Tujuan pengukuran jarak sensor kamera untuk mengetahui dan mengukur jarak objek dengan sensor kamera. Seperti pada gambar 5.1 di bawah ini jarak sensor kamera ke objek benda yang ada di depan robot.
Pada Gambar 5.2 Hasil yang diperoleh dari proses pengukuran pada sensor kamera CMUCam dengan obyek benda berwarna. Apabila di bandingkan dengan hasil perhitungan secara teoritis dapat dikatakan bahwa sensor ini menghasilkan nilai jarak yang lebih tinggi.
Persentasi kesalahan yang diperoleh relative besar. Pada pengukuran jarak di bawah 5 cm, sensor ini mempunyai tingkat kesalahan yang cukup kecil. Sedangkan pengukuran jarak di atas 10 cm, tingkat kesalahannya sangat besar.
5.2 Pengujian Kemampuan Motor DC dalam Menggerakan Robot
Bagian aktuator yaitu motor DC diuji kemampuannya untuk menggerakan robot. Dapat diketahui nantinya perbedaan putaran motor ketika dibebani oleh kerangka robot dan pada saat berputar tanpa beban. Motor DC yang dikenal presisi juga perlu diuji kesamaan karakteristiknya.
Tujuan menguji motor DC untuk mengetahui dan mengukur kemampuan motor DC dalam menggerakan robot.
Gambar 5.3 Pengujian Motor DC
tidak di bebani dan membelok. Pada saat di bebani, perputaran sedikit lebih lambat dari pada saat tidak di bebani. Sedangkan untuk perbandingan kecepatan roda kiri dan kanan, terlihat motor kanan lebih lambat dari pada motor kiri. Dari kecepatan menunjukkan bahwa motor DC sedikit teredam torsinya ketika di bebani robot dan kecepatan antara roda kiri dan kanan tidak identik. Maka dari itu roda yang kiri dibuat bebas agar kecepatan bisa stabil jika ada beban atau membelok.
5.3 Pengujian Pada Objek Benda Berwarna
Pada bagian ini pengujian objek benda berwarna yang terdeteksi oleh sensor kamera robot becak tersebut antara lain benda-benda padat. Tujuan pengujian objek benda datar ini untuk mengetahui seberapa pekanya sensor kamera dapat mendeteksi adanya objek benda yang ada di depan robot becak tersebut.
Gambar 5.4 Dengan benda berwarna ( arah lurus )
ada halangan di sekitarnya. Ketika robot sudah menemukan objek benda yang ada di depannya maka robot akan berhenti. Berikut adalah gambar 5.5 robot belok ke arah kanan.
Gambar 5.5 Robot belok ke arah kanan ketika objek di sebelah kanan Secara otomatis robot akan membelok ke kanan ketika benda tersebut di sebelah kanan. Ketika robot mengarah ke kanan maka putran motor DC akan melaju cepat di bandingkan mengarah ke kiri ketika objek di sebelah kiri. Berikut adalah gambar 5.6 ketika robot mendeteksi adanya objek benda berwarna di sebelah kiri.