16
BAB III
PERANCANGAN ALAT
Bab ini akan menjelaskan mengenai perancangan serta realisasi perangkat keras maupun perangkat lunak pada perancangan skripsi ini. Perancangan secara keseluruhan terbagi menjadi perancangan mekanik, perancangan elektronik maupun perancangan perangkat lunak
3.1. Gambaran Alat
Sistem yang akan dirancang adalah sebuah alat peraga fisika yang terdiri dari sebuah bidang miring yang dapat diatur sudut kemiringannya, sebuah beban yang memiliki berat dan jenis permukaan yang bervariasi yang akan diluncurkan di permukaan bidang miring dan user interface yang akan menampilkan besaran-besaran fisika yang akan diamati secara real time baik dalam bentuk grafik maupun data mentah.
Alat peraga fisika ini juga dilengkapi dengan sensor jarak dan sensor kemiringan di mana kedua sensor ini berguna sebagai pengukur jarak beban saat sedang meluncur dan sebagai penentu besar kemiringan bidang miring yang nantinya hasil pengukuran sensor akan diolah oleh user interface untuk mendapatkan besaran-besaran fisika yang akan diamati, yaitu : kecepatan, percepatan, energi kinetik, energi potensial, energi yang hilang karena gesekan, dan koefisien gesek kinetik antara permukaan beban dan bidang miring.
17
3.2. Perancangan Mekanik
Mekanik alat peraga fisika terbuat dari bahan kayu yang memiliki panjang 200 cm, 40 cm, dan lebar 30 cm pada keadaan tertutup (0 derajat). Sisi bidang miring memiliki panjang 160 cm dan lebar 30 cm dengan kemiringan yang dapat diatur mulai dari 0o hingga 90o. Dibagian bawah sisi miring terdapat penyangga sisi miring yang dapat diatur letaknya untuk sesuai dengan kemiringan sisi mirang alat peraga. Selain itu juga terdapat sebuah beban dengan berat (200 gram, 300 gram, 400 gram, dan 500 gram) dan jenis permukaan alas yang bervariasi. Modul yang terpasang pada alat peraga fisika ini antara lain:
Sensor HY-SRF05 sebagai penentu jarak beban saat beban meluncur.
Sensor akselerometer ADXL345 sebagai penentu besar kemiringan sisi miring alat peraga
Board mikrokontroler Atmega 2560.
Gambar 3.2. Gambar sketsa sisi miring tampak atas
18 .
Gambar 3.4. Realisasi mekanik alat peraga fisika.
3.3. Perancangan Elektronika Alat Peraga Fisika
Pada bagian ini akan dijelaskan mengenai perancangan elektronika modul alat peraga fisika. Bagian elektronika modul alat peraga fisika terdiri dari bagian-bagian utama sebagai berikut:
1) Minimum system mikrokontroler ATmega2560 sebagai pengendali utama. 2) Akselerometer digital ADXL345
19
3.3.1. Pengendali Utama
Sebagai pengendali utama modul alat peraga fisika digunakan mikrokontroler AVR ATmega2560. Tugas mikrokontroler ini pada alat peraga antara lain:
1. Mengambil data mentah dari sensor akselerometer digital ADXL345 melalui jalur komunikasi I2C.
2. Mengambil data mentah dari sensor ultrasonik HY-SRF05.
3. Mengkonversi data mentah dari akselerometer digital ADXL345 menjadi data percepatan gravitasi dalam satuan g terkalibrasi untuk masing-masing sumbu x, y, dan z, kemudian data ini diubah menjadi data kemiringan sudut θ.
4. Mengkonversi data mentah dari sensor ultrasonik HY-SRF05 menjadi data jarak dalam satuan centimeter.
5. Melakukan filtering data kemiringan sudut θ dari sensor akselerometer digital. 6. Melakukan komunikasi data serial dengan program user interface.
Tabel 3.1. Konfigurasi pin mikrokontroler AVR ATmega2560 yang digunakan.
Nama Port Fungsi
PORTB 5 dan PORTB 6 Data HY-SRF 05
20
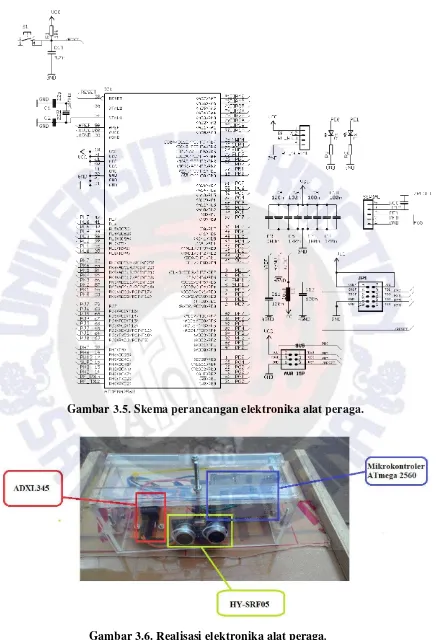
Gambar 3.5. Skema perancangan elektronika alat peraga.
21
3.4. Perancangan Perangkat Lunak
Pada bagian ini akan dijelaskan mengenai perancangan perangkat lunak alat peraga yang terdiri dari kalibrasi dan pengolahan data sensor digital, user interface, serta diagram alir program utama:
3.4.1. Pengolahan Data Akselerometer Digital
Pada alat peraga ini digunakan data kemiringan sudut yaitu kemiringan sudut θ sebagai penentu seberapa besar kemiringan sisi miring alat peraga. Data kemiringan sudut ini diperoleh melalui data kalkulasi data percepatan gravitasi yang terukur oleh akselerometer digital ADXL345. Sensor akselerometer digital diatur pada jangkauan pengukuran ±2g. Perlu diperhatikan bahwa jika sensor atau sistem yang diukur mengalami percepatan misal karena digerakkan, maka data kemiringan sudut tidak akan valid.
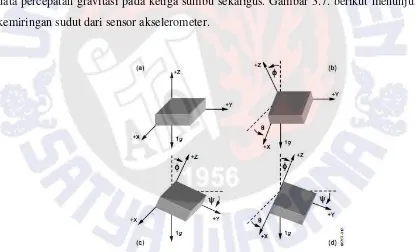
Salah satu cara untuk mendapatkan data kemiringan sudut adalah dengan mengolah data percepatan gravitasi pada ketiga sumbu sekaligus. Gambar 3.7. berikut menunjukkan kemiringan sudut dari sensor akselerometer.
Gambar 3.7. Berbagai posisi kemiringan sudut dari sensor akselerometer
Kemiringan sudut , ψ, dan dapat dihitung dengan mengolah data percepatan gravitasi pada ketiga sumbu dengan menggunakan rumus sebagai berikut [13][14]:
θ = tan−1 A ,O
√A2,O + A ,O
22
AX, Out : percepatan gravitasi pada sumbu X. AY, Out : percepatan gravitasi pada sumbu Y. AZ, Out : percepatan gravitasi pada sumbu Z.
: sudut antara horizontal sensor dengan sumbu X. : sudut antara horizontal sensor dengan sumbu Y. : sudut antara vektor gravitasi dengan sumbu Z.
Pada skripsi ini akan digunakan kemiringan sudut saja sebagai acuan kemiringan sudut dari sisi miring alat peraga.
Sebelum dapat digunakan untuk mengukur kemiringan sudut, terlebih dahulu diuji apakah sensitivitas akselerometer digital sama untuk setiap sumbu x, y, dan, z. Hal ini penting karena untuk mendapatkan data kemiringan sudut yang akurat dengan menggunakan rumus sebelumnya, sensitivitas sensor pada setiap sumbu harus sama atau tidak memiliki selisih yang jauh. Setelah dilakukan pengujian ternyata ditemukan bahwa sensitifitas setiap sumbu tidak sama. Jika tidak sama, maka diperlukan kalibrasi untuk menyamakan data setiap sumbu. Berikut adalah persamaan kalibrasinya:
= (� ,� �− �� ,���)
���= � ,� � − �
� ,� � = (� ,� − ���)
23
�s : sensitivitas sumbu X akselerometer. �Off : offset sumbu X akselerometer.
A ,Max : percepatan gravitasi maksimum pada sumbu X positif (LSB). � ,��� : percepatan gravitasi minimum pada sumbu X negatif (LSB). � ,� : percepatan gravitasi pada sumbu X (LSB).
� ,� � : percepatan gravitasi sumbu X terkalibrasi (dalam g). �s : Sensitifitas sumbu Y akselerometer.
�Off : Offset sumbu Y akselerometer.
A ,Max : percepatan gravitasi maksimum pada sumbu Y positif (LSB). � ,��� : percepatan gravitasi minimum pada sumbu Y negatif (LSB). � ,� : percepatan gravitasi pada sumbu Y (LSB).
� ,� � : percepatan gravitasi sumbu Y terkalibrasi (dalam g). �s : sensitifitas sumbu Z akselerometer.
�Off : offset sumbu Z akselerometer.
A ,Max : percepatan gravitasi maksimum pada sumbu Z positif (LSB). � ,��� : percepatan gravitasi minimum pada sumbu Z negatif (LSB). � ,� : percepatan gravitasi pada sumbu Z (LSB).
24
3.4.2. Sensor Ultrasonik HY-SRF05
Merupakan sensor pengukur jarak yang menggunakan gelombang ultrasonik. Di mana terdapat pemancar yang mengirimkan seberkas gelombang ultrasonik yang kemudian diukur waktu yang dibutuhkan gelombang tersebut dari mulai dipancarkan hingga terpantul dari objek dan diterima oleh penerima.
HY-SRF05 memiliki dua mode yang berbeda dalam penggunaanya[10]. 1. Mode 1 – Trigger dan echo terpisah
Pada mode ini, untuk mengakses input dan output digunakan pin trigger dan echo secara terpisah. Artinya satu pin akan berfungsi sebagai transmitter dan
satu pin akan berfungsi sebagai . Jadi antara trigger dan echo dibedakan.
Gambar 3.8. HY-SRF05 Mode 1
25 2. Mode 2 – Trigger dan echo dalam 1 pin
Pada mode ini digunakan 1 pin untuk digunakan sebagai trigger sekaligus echo. Untuk menggunakan mode ini, hubungkan pin mode pada ground. Sinyal echo dan sinyal trigger didapat dari 1pin saja dengan delay antara sinyal trigger dan echo kurang lebih 700us.
Gambar 3.10. HY-SRF05 Mode 2
Gambar 3.11. Timing Diagram HY-SRF05 Mode 2
26
3.4.3. User Interface (Program Desktop)
Alat peraga fisika ini dilengkapi dengan user interface yang terhubung melalui protokol serial dengan mikrokontroler. Di mana data yang diakuisisi oleh mikrokontroler dari ADXL345 dan HY-SRF05 selanjutnya akan dikirim melalui protokol serial ke desktop dan akan diolah untuk mendapatkan besaran-besaran fisika yang ingin diamati, dalam hal ini yaitu : kecepatan, percepatan, EK, EP, Energi yang hilang, dan koefisien gaya gesek kinetic dalam bentuk grafik maupun data mentah secara real time.
Perangkat lunak diatur agar melakukan perulangan program (looping) setiap 150 ms secara tetap. Perulangan ini penting untuk sampling data sensor, filter digital, kalkulasi besaran-besaran fisika.
Program user interface alat peraga ini dibuat dengan menggunakan program Microsoft Visual Studio 2010.
Gambar 3.12. User Interface alat peraga
Penjelasan tiap bagian pada program user interface dapat dilihat sebagai berikut :
27
B : Terdapat list box di mana di dalam list box tersebut akan nampak secara real time besaran yang diamati persampling waktu yang sudah ditentukan.
Pada list box ini akan ditampilkan posisi beban, kecepatan sementara, percepatan sementara, EK, EP, dan Energi yang hilang.
C : Tombol start berfungsi untuk menandai bahwa program sudah dijalankan dan beban siap untuk diluncurkan. Tanpa menekan tombol start program tidak akan berjalan walaupun beban diluncurkan. Tombol clear berfungsi untuk membersihkan semua data dan grafik sebelum melakukan peragaan ulang.
D : Tombol exit digunakan untuk keluar dari program desktop.
E : Terdapat panel yang akan menampilkan besar sudut sisi miring, koefisien gaya gesek kinetik, percepatan rerata, dan kecepatan rerata.
28
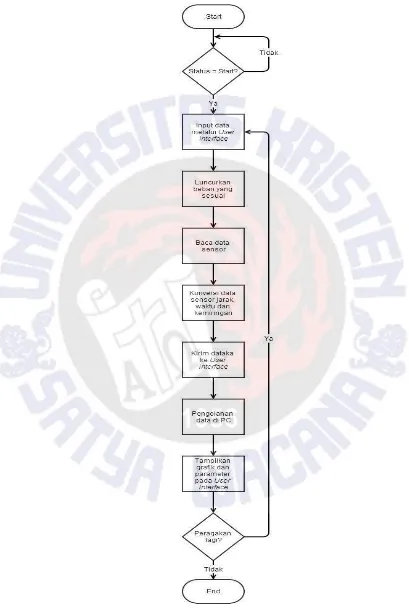
Berikut adalah diagram alir program user interface dari alat peraga fisika
29
Penjelasan Diagram Alir Alat Peraga
1. User mengaktifkan alat peraga fisika dengan menekan button start.
2. User memasukkan data yang diperlukan dan menentukan parameter besaran apa yang ingin diamati pada user interface.
3. User meletakkan beban yang sesuai dengan data yang sudah ditentukan pada user interface pada tempat yang sudah disediakan di puncak bidang miring.
4. User melepas beban dan beban meluncur dari puncak bidang miring hingga menyentuh dasar bidang miring.
5. Microcontroller akan menghitung sudut, jarak dan waktu yang ditempuh beban saat meluncur dari bidang miring dari sensor yang ada.
6. Disamping melakukan pembacaan sensor, microcontroller juga akan mengirim data ke user interface melalui serial / USB.
7. Program user interface akan menampilkan data sensor yang dikirimkan oleh microcontroller, serta menghitung parameter-parameter besaran percepatan, kecepatan, energi kinetik, energi potensial, energi mekanik total, energi yang hilang karena gesekan dan koefisien gaya gesek kinetik.