ANALISIS BIFURKASI PADA MODEL MATEMATIS PREDATOR PREY DENGAN DUA PREDATOR
SKRIPSI
Diajukan kepada Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Negeri Yogyakarta
untuk Memenuhi Sebagian Persyaratan guna Memperoleh Gelar Sarjana Sains
Oleh Lia Listyana NIM 11305144026
PROGRAM STUDI MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS NEGERI YOGYAKARTA
SURAT PERNYATAAN
Yang bertanda tangan di bawah ini, saya:
Nama : Lia Listyana
NIM : 11305144026
Prodi : Matematika
Fakultas : MIPA
Judul TAS : Analisis Bifurkasi pada Model Matematis Sistem Predator- Prey dengan Dua Predator
dengan ini menyatakan bahwa skripsi ini benar-benar merupakan hasil karya saya sendiri dan sepanjang pengetahuan saya tidak terdapat karya atau pendapat yang ditulis atau diterbitkan orang atau institusi lain kecuali pada bagian tertentu yang memang diambil sebagai pedoman, acuan, atau kutipan dengan mengikuti tata penulisan karya ilmiah yang telah lazim.
Yogyakarta, 2 Mei 2016
Yang menyatakan,
Lia Listyana
HALAMAN MOTTO
“Karena sesungguhnya sesudah kesulitan itu ada kemudahan. Sesungguhnya
sesudah kesulitan itu ada kemudahan.”
(Q.S. Al Insyirah : 5-6)
“Jangan khawatirkan kesulitan-kesulitan dalam Matematika. Saya pastikan
bahwa kesulitanku dalam hal Matematika masih lebih sulit daripada kesulitanmu.”
HALAMAN PERSEMBAHAN
Karya tulis ini aku persembahkan untuk
“Kedua orang tuaku tercinta, Ibu Sumiyatun dan Bapak Sunarto”
untuk semua pengorbanan, kerja keras, dukungan, kasih sayang, dan doa yang telah diberikan selama ini
“Kedua adikku tersayang, Tika Widyaningrum dan Fahmi Putra”
“Mas Panggah Budi Santoso yang selalu memberikan semangat dan doa”
“Sahabat-sahabatku Melati, Anis, Risqi, Andin, dan Dita”
“Rekan-rekan seperjuangan, Matswa 2011 dan KKN ND 27 2014”
“Pelita dalam gelapku, Bapak/bu Guru, Dosen, dan Pendidik”
dan
ANALISIS BIFURKASI PADA MODEL MATEMATIS PREDATOR PREY DENGAN DUA PREDATOR
Oleh: Lia Listyana NIM. 11305144026
ABSTRAK
Penelitian ini bertujuan untuk menganalisis model matematis sistem predator prey dengan dua predator dan mengetahui jenis bifurkasi sistem tersebut dengan perubahan laju kematian kedua jenis predator.
Model predator prey dengan dua predator memiliki lima titik ekuilibrium yang keberadaan tiga di antaranya bergantung pada laju kematian kedua jenis predator dan dua titik ekuilibrium yang lain tidak bergantung pada laju kematian kedua jenis predator. Kestabilan masing-masing titik ekuilibrium ditentukan berdasarkan nilai eigen masing-masing titik ekuilibrium. Perubahan kestabilan masing-masing titik ekuilibrium dan perubahan banyaknya titik ekuilibrium sebagai penanda terjadinya bifurkasi. Selain itu, simulasi dilakukan untuk beberapa pasang nilai laju kematian.
Hasil perhitungan nilai eigen dan hasil analisis secara numerik menunjukkan terjadinya bifurkasi pada sistem predator prey dengan dua predator saat laju kematian predator jenis I adalah per satuan waktu dan laju kematian predator jenis II adalah per satuan waktu. Pada saat laju kematian predator jenis I lebih dari atau sama dengan per satuan waktu dan laju kematian predator jenis II lebih dari atau sama dengan per satuan waktu terdapat dua titik ekuilibrium. Kemudian saat laju kematian predator jenis I kurang dari per satuan waktu dan laju kematian predator jenis II lebih dari atau sama dengan per satuan waktu atau saat laju kematian predator jenis I lebih dari atau sama dengan per satuan waktu dan laju kematian predator jenis II kurang dari per satuan waktu terdapat tiga titik ekuilibrium dan untuk laju kematian predator jenis I kurang dari per satuan waktu dan laju kematian predator jenis II kurang dari per satuan waktu terdapat empat titik ekuilibrium.
KATA PENGANTAR
Assalamu’alaikum Wr. Wb
Puji syukur penulis panjatkan kepada Allah SWT yang telah melimpahkan rahmat, hidayah, dan karunia-Nya sehingga penulis dapat menyelesaikan tugas akhir skripsi yang berjudul “Analisis Bifurkasi pada Model Matematis Predator
Prey dengan Dua Predator”. Penyusunan tugas akhir skripsi ini ditujukan untuk memenuhi sebagian syarat kelulusan guna meraih gelar Sarjana Sains pada Program Studi Matematika, Jurusan Pendidikan Matematika, Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Negeri Yogyakarta.
Penulis menyadari bahwa dalam penulisan tugas akhir skripsi ini tidak akan terlaksana dengan baik tanpa adanya dukungan dari berbagai pihak, naik berupa bimbingan, petunjuk, nasehat, maupun dorongan moral dan spiritual. Oleh karena itu, pada kesempatan kali ini penulis menyampaikan terima kasih kepada
1. Bapak Dr. Hartono selaku Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Negeri Yogyakarta dan selaku dosen pembimbing tugas akhir skripsi yang telah memberikan bimbingan dan pengarahan dalam penyusunan tugas akhir skripsi ini.
3. Bapak Dr. Agus Maman Abadi selaku Ketua Program Studi Matematika Universitas Negeri Yogyakarta.
4. Bapak Kus Prihantoso Krisnawan, M.Si selaku dosen pembimbing tugas akhir skripsi yang telah memberikan bimbingan dan pengarahan dalam penyusunan tugas akhir skripsi ini.
5. Kedua orang tua, Ibu Sumiyatun dan Bapak Sunarto atas doa dan fasilitas yang telah diberikan selama ini.
6. Seluruh dosen Jurusan Pendidikan Matematika FMIPA UNY dan guru-guru almamater yang selama masa studi ini telah memberikan banyak ilmu dan pengalaman hidup yang berharga bagi penulis.
7. Rekan-rekan mahasiswa Matematika Swadana 2011 dan semua pihak yang telah membantu secara langsung maupun tidak langsung sehingga tugas akhir skripsi ini dapat terselesaikan dengan baik.
Penulis menyadari bahwa penyusunan tugas akhir skripsi ini masih jauh dari kata sempurna. Oleh karena itu, penulis sangat mengharapkan kritik maupun saran dari berbagai pihak demi kesempurnaan tugas akhir ini. Semoga tugas akhir skripsi ini dapat memberikan manfaat bagi kita semua.
Wassalamu’alaikum Wr.Wb
Yogyakarta, 2 Mei 2016 Penulis,
Lia Listyana
DAFTAR ISI
HALAMAN JUDUL ………..…….. i
HALAMAN PERSETUJUAN ………. ii
HALAMAN PERNYATAAN ………. iii
HALAMAN PENGESAHAN ……….….... iv
HALAMAN MOTTO ………... v
HALAMAN PERSEMBAHAN ………... vi
ABSTRAK ………...…. vii
KATA PENGANTAR ………...………..… viii
DAFTAR ISI ………... x
DAFTAR GAMBAR ……….……….. xiii
DAFTAR TABEL ……… xiv
DAFTAR LAMPIRAN ……… xv
DAFTAR SIMBOL ……….. xvi
BAB I PENDAHULUAN A. Latar Belakang Masalah ……….….…. 1
B. Rumusan Masalah ………. 4
C. Batasan Masalah ……… 4
D. Tujuan Penulisan ……… 5
BAB II KAJIAN PUSTAKA
A. Nilai Eigen, Vektor Eigen, Diagonalisasi, dan Kebebasan Linear ….... 6
B. Sistem Dinamik ……….…… 13
C. Model Matematis Sistem Predator-Prey ………..……… 15
D. Deret Taylor dan Deret Maclaurin ………... 17
E. Sistem Linear ……… 18
F. Titik Ekuilibrium ……….. 23
G. Linearisasasi Sistem Non linear ………... 24
H. Kestabilan Titik Ekuilibrium ………..………..… 25
I. Kriteria Routh-Hurwitz ………. 29
J. Bifurkasi ……… 31
K. Teori Center Manifold ……….. 35
L. Vektor Eigen Tergeneralisasi ……… 36
BAB III PEMBAHASAN A. Model Matematis Sistem Predator-Prey dengan Dua Predator 1. Asumsi Dasar ………... 38
2. Pembentukan Model Matematis Predator-Prey ……….. 41
a. Model Matematis Prey ……….. 41
b. Model Matematis Predator Jenis I ……… 41
c. Model Matematis Predator Jenis II ……… 42
B. Titik Ekuilibrium Sistem Predator-Prey dengan Dua Predator ……… 43
D. Sistem dengan Dua Parameter Bebas ………. 57
1. Titik Ekuilibrium ………...…... 58
2. Analisis Kestabilan ……….. 59
3. Transformasi Sistem a. Translasi Parameter ….………...….….….. 62
b. Nilai Eigen dan Vektor Eigen Saat Bifurkasi ………. 62
c. Pendefinisian Variabel Baru ……….…….. 66
d. Persamaan Center Manifold ………...………. 68
e. Hasil Transformasi ……….…. 71
f. Potret Fase Hasil Transformasi Sistem ………..…….…… 72
BAB IV PENUTUP A. Kesimpulan ……….… 84
B. Saran ……….. 89
DAFTAR PUSTAKA ……… 90
DAFTAR GAMBAR
Gambar 2.1 Bifurkasi Saddle Nodes ……….. 32
Gambar 2.2 Bifurkasi Transkritikal ……….…... 33
Gambar 2.3 Bifurkasi Pitchfork Superkritikal ……… 34
Gambar 2.4 Bifurkasi Pitchfork Subkritikal ……… 34
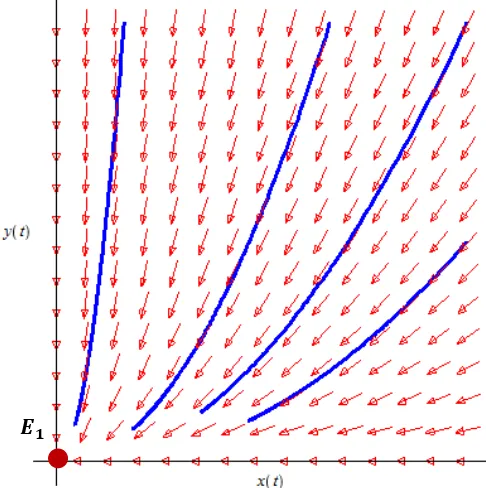
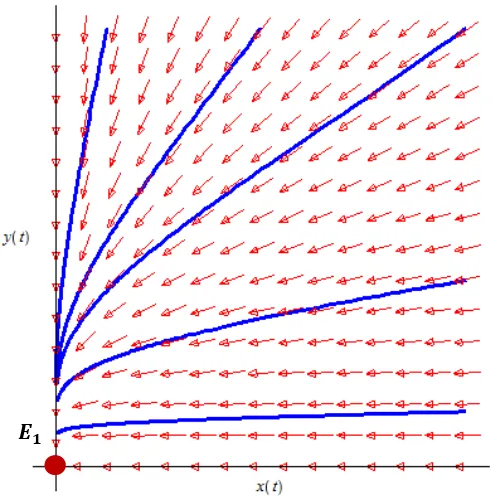
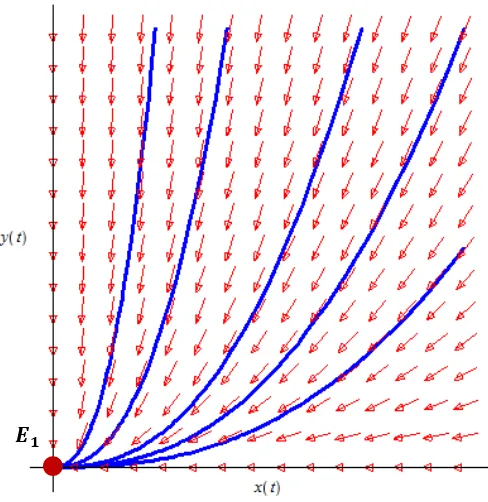
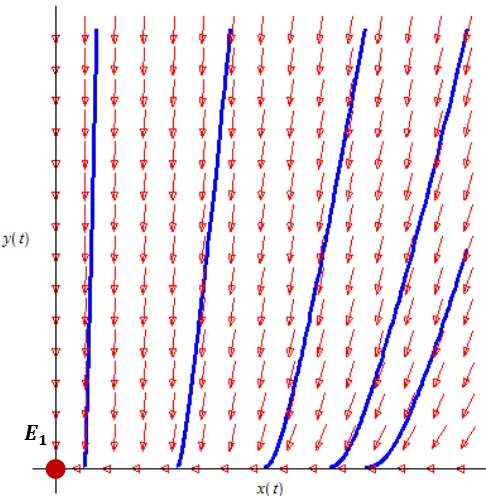
Gambar 3.1 Potret fase pada dan ……….… 72
Gambar 3.2 Potret fase pada dan ……….... 73
Gambar 3.3 Potret fase pada dan ………... 74 Gambar 3.4 Potret fase pada dan ………. 75 Gambar 3.5 Potret fase pada dan ……….… 76
Gambar 3.6 Potret fase pada dan ……… 77
Gambar 3.7 Potret fase pada dan ……….… 78
Gambar 3.8 Potret fase pada dan ……….. 79
DAFTAR TABEL
Tabel 2.1 Tabel Routh Hurwitz ………... 30
Tabel 3.1 Definisi Variabel dan Parameter ………..………... 39
Tabel 3.2 Tabel Routh-Hurwitz untuk Titik Ekuilibrium ….……….. 57
Tabel 3.3 Nilai parameter pada sistem predator-prey (3.16) ……….. 57
DAFTAR LAMPIRAN
Lampiran 1. Perintah Maple 15 untuk Memperoleh Persamaan Manifold
Center………. 93
Lampiran 2. Perintah Maple 15 untuk Menggambarkan Potret Fase Sistem
(3.78) untuk dan ……..……….…….………. 96
Lampiran 3. Perintah Maple 15 untuk Menggambarkan Potret Fase Sistem (3.78) untuk dan ……….……… 97 Lampiran 4. Perintah Maple 15 untuk Menggambarkan Potret Fase Sistem
(3.78) untuk dan ……….……… 98 Lampiran 5. Perintah Maple 15 untuk Menggambarkan Potret Fase Sistem
(3.78) untuk dan ……….…...… 99
Lampiran 6. Perintah Maple 15 untuk Menggambarkan Potret Fase Sistem (3.78) untuk dan ……….……..…… 100 Lampiran 7. Perintah Maple 15 untuk Menggambarkan Potret Fase Sistem
(3.78) untuk dan ……….. 101 Lampiran 8. Perintah Maple 15 untuk Menggambarkan Potret Fase Sistem
(3.78) untuk dan …………..……. 102 Lampiran 9. Perintah Maple 15 untuk Menggambarkan Potret Fase Sistem
(3.78) untuk dan ……….... 103
DAFTAR SIMBOL
: Himpunan bilangan real.
: Himpunan bilangan real pada ruang dimensi . : Sama dengan.
: Tidak sama dengan.
: Elemen atau himpunan bagian : Kurang dari.
: Kurang dari atau sama dengan. : Lebih dari.
: Lebih dari atau sama dengan. : Tak hingga.
| | : Determinan.
|| || : Norm.
: Akhir pembuktian. : Matriks identitas.
: Transpose dari matriks . : Invers dari matriks .
: Bagian real dari nilai eigen. : Matriks Jacobian dari .
: Waktu.
: Variabel keadaan.
̇ : Turunan variabel keadaan terhadap waktu. ̅ : Titik ekuilibrium.
: Laju kelahiran alami prey.
: Laju kematian predator jenis I.
: Laju kematian predator jenis II.
: Parameter interaksi antara prey dengan sesama jenisnya.
: Parameter interaksi antara prey dengan predator jenis I.
: Parameter interaksi antara prey dengan predator jenis II.
: Parameter interaksi antara predator jenis I dengan prey.
: Parameter interaksi antara predator jenis I dengan predator jenis II.
: Parameter interaksi antara predator jenis II dengan prey.
BAB I
PENDAHULUAN
A. Latar Belakang Masalah
Tikus sawah (Rattus argentiventer) merupakan salah satu spesies hewan pengerat yang mengganggu aktivitas manusia terutama petani. Menurut Balai Besar Penelitian Tanaman Padi, tikus sawah merupakan hama utama penyebab kerusakan padi di Indonesia yang dapat menyebabkan kerusakan pada tanaman padi dari mulai persemaian sampai panen, bahkan sampai penyimpanan. Hama tikus sangat sulit dikendalikan karena tikus memiliki daya adaptasi, mobilitas, dan kemampuan untuk berkembang biak yang sangat tinggi. Namun, tikus juga mempunyai musuh alami yang salah satu musuh alami tikus adalah ular jali atau ular koros (Ptyas korros).
Burung hantu merupakan hewan nokturnal yang aktif pada malam hari. Burung hantu juga merupakan jenis hewan pemangsa tikus. Salah satu spesies burung hantu adalah burung hantu serak jawa (Tyto alba javanica) yang mempunyai karakteristik khusus yaitu mempunyai laju metabolisme yang lebih tinggi, sehingga membutuhkan banyak makanan. Para petani menganggap bahwa burung ini lebih efektif secara ekonomi daripada penggunaan racun dalam mengatasi serangan hewan pengerat seperti tikus.
Tikus, ular jali, dan burung hantu merupakan tiga spesies yang dapat saling berinteraksi. Kehadiran burung hantu yang merupakan musuh alami tikus dan ular jali akan berpengaruh terhadap keberadaan tikus dan ular jali karena burung hantu akan memangsa tikus dan ular jali, sedangkan kehadiran ular jali juga akan berpengaruh terhadap keberadaan tikus karena ular jali akan memangsa tikus sehingga setiap spesies saling memberikan pengaruh. Dengan demikian, interaksi pada tikus, ular jali, dan burung hantu dapat dirumuskan ke dalam model predator-prey.
Model predator-prey diperkenalkan oleh Lotka pada tahun 1925 dan Volterra pada tahun 1926, sehingga model predator-prey sering disebut juga model Lotka-Volterra (Boyce dan Diprima, 2009:534). Bentuk sederhana dari model predator-prey yaitu interaksi antara satu spesies predator dengan satu spesies prey dapat dituliskan dalam bentuk :
dengan adalah populasi prey dan adalah populasi predator, sedangkan , , , dan merupakan parameter yang bernilai positif.
Interaksi antara tikus, ular sawah, dan burung hantu dapat dirumuskan ke dalam model predator-prey dengan tikus sebagai prey, sedangkan ular sawah sebagai predator sekaligus prey dan burung hantu sebagai predator. Interaksi antara dua spesies predator dengan prey ini dapat dirumuskan ke dalam model matematis yang disebut model matematis sistem predator-prey dengan dua predator. Model matematis sistem predator-prey dengan dua predator memiliki beberapa parameter sebagai berikut.
a. merupakan laju kelahiran alami prey b. merupakan laju kematian predator jenis I c. merupakan laju kematian predator jenis II
d. merupakan parameter interaksi antara prey dengan sesama jenisnya e. merupakan parameter interaksi antara prey dengan predator jenis I f. merupakan parameter interaksi antara prey dengan predator jenis II g. merupakan parameter interaksi antara predator jenis I dengan prey h. merupakan parameter interaksi antara predator jenis I dengan
predator jenis II
i. merupakan parameter interaksi antara predator jenis II dengan prey j. merupakan parameter interaksi antara predator jenis II dengan
predator jenis I.
(keseimbangan) atau yang sering disebut bifurkasi apabila parameternya divariasikan.
B. Rumusan Masalah
Berdasarkan latar belakang yang telah diungkapkan di atas, maka rumusan masalah yang akan dibahas dalam skripsi ini adalah sebagai berikut :
1. Bagaimana model matematis dari sistem predator-prey dengan dua predator?
2. Jenis bifurkasi apa saja yang mungkin terjadi pada model matematis predator-prey dengan dua predator apabila parameter dan divariasikan?
C. Batasan Masalah
Pembatasan permasalahan yang perlu diperhatikan dalam skripsi ini adalah sebagai berikut.
1. pembentukan model matematis sistem predator-prey dengan dua predator berdasarkan asumsi yang diberikan,
2. menentukan titik ekuilibrium dan kestabilan dari model matematis sistem predator-prey dengan dua predator,
D. Tujuan Penulisan
Berdasarkan perumusan masalah di atas, tujuan yang ingin dicapai dalam penulisan skripsi ini adalah sebagai berikut
1. Mengetahui model matematis predator-prey dengan dua predator.
2. Mengetahui jenis bifurkasi yang terjadi pada model matematis predator-prey dengan dua predator.
E. Manfaat Penulisan
Penulisan skripsi ini diharapkan dapat memberikan manfaat sebagai berikut
1. Bagi penulis, untuk mengembangkan dan mengaplikasikan pengetahuan dan keilmuan di bidang matematika.
2. Bagi pembaca, menambah pengetahuan bidang matematika khususnya sistem persamaan diferensial, model matematis predator-prey dengan dua predator, dan bifurkasi pada model matematis.
BAB II
KAJIAN TEORI
Pada bab ini akan dibahas mengenai nilai eigen dan vektor eigen, sistem dinamik, sistem linear, sistem nonlinear, titik ekuilibrium, analisis kestabilan sistem dinamik, kriteria Routh-Hurwitz, bifurkasi, teori center manifold, dan vektor eigen tergeneralisasi.
A. Nilai Eigen, Vektor Eigen, Kebebasan Linear, dan Diagonalisasi
Penentuan nilai eigen dan vektor eigen sangat diperlukan untuk mencari solusi dari suatu sistem dinamik linear. Nilai eigen dan vektor eigen juga diperlukan dalam menentukan sifat kestabilan dari suatu sistem dinamik.
Definisi 2.1 (Anton, 1995 : 277)
Jika merupakan matriks yang berukuran , maka vektor taknol di dalam dinamakan vektor eigen dari jika memenuhi persamaan
Nilai eigen dari matriks yang berukuran diperoleh dari atau dapat ditulis sebagai . Persamaan tersebut secara ekuivalen dapat ditulis kembali menjadi
dengan adalah matriks identitas. Persamaan (2.2) mempunyai penyelesaian taktrivial jika dan hanya jika
| |
Persamaan (2.3) dinamakan persamaan karakteristik dari matriks . Contoh 2.1
Tentukan nilai eigen dan vektor eigen dari matriks berikut ini.
[ ]
Berdasarkan persamaan (2.3) maka diperoleh
| |
|
|
sehingga persamaan karakteristiknya adalah
sehingga berdasarkan persamaan (2.4) diperoleh nilai eigen dari matriks yaitu
, , dan
[
] [ ] [ ]
Untuk , maka (2.5) menjadi
[
] [ ] [ ]
Sistem (2.6) ekuivalen dengan persamaan berikut :
Berdasarkan (2.7) diperoleh penyelesaian dari sistem (2.6) adalah , dan
. Misalkan , maka vektor eigen yang bersesuaian dengan adalah
[ ]
Untuk , maka (2.5) menjadi
[
] [ ] [ ]
Sistem (2.9) ekuivalen dengan persamaan berikut :
Berdasarkan (2.10) diperoleh penyelesaian dari sistem (2.9) adalah dan
. Misalkan , maka vektor eigen yang bersesuaian dengan adalah
Untuk , maka (2.5) menjadi
[
] [ ] [ ]
Sistem (2.12) ekuivalen dengan persamaan berikut :
Berdasarkan (2.13) diperoleh penyelesaian dari sistem (2.12) adalah dan
. Misalkan , maka vektor eigen yang bersesuaian dengan adalah
[ ]
Berdasarkan (2.8), (2.11), dan (2.14) maka vektor eigen yang bersesuaian dengan
adalah [ ], [ ], dan [ ].
Definisi 2.2 (Anton, 1995:284)
Matriks yang berukuran dikatakan dapat didiagonalisasi (diagonalizable) jika terdapat matriks yang mempunyai invers sedemikian sehingga adalah matriks diagonal, maka matriks dikatakan mendiagonalisasi matriks . Definisi 2.3 (Anton, 1995:151)
Jika adalah himpunan vektor, maka persamaan vektor
mempunyai paling sedikit satu penyelesaian, yaitu
Jika (2.16) merupakan satu-satunya penyelesaian, maka dinamakan himpunan bebas linear (linearly independent), sedangkan jika ada penyelesaian lain maka dinamakan himpunan takbebas linear (linearly dependent).
Teorema 2.1 (Anton, 1995:285)
Jika adalah matriks , maka kedua pernyataan berikut ini adalah ekuivalen. (a) dapat didiagonalisasi
(b) mempunyai vektor eigen bebas linear Bukti:
(a) (b). Karena dapat didiagonalisasi, maka terdapat matriks yang mempunyai invers. Misalkan
[
]
sehingga adalah matriks diagonal, dimana
[
]
maka,
, yakni
[
] [
] [
Jika dimisalkan menyatakan vektor-vektor kolom , maka bentuk (2.17) kolom-kolom yang berurutan merupakan . Akan tetapi kolom-kolom dari hasil kali adalah , sehingga diperoleh
Karena mempunyai invers, maka vektor-vektor kolomnya tidak bernilai nol, jadi berdasarkan Definisi 2.1, adalah nilai-nilai eigen , dan
adalah vektor-vektor eigen yang bersesuaian. Karena mempunyai invers maka diperoleh bahwa bebas linear. Jadi memiliki vektor eigen bebas linear.
(b) (a). Karena memiliki vektor eigen bebas linear misalkan
, maka terdapat nilai eigen yang bersesuaian yaitu , dan misalkan
[
]
adalah matriks yang vektor-vektor kolomnya adalah . Karena
merupakan vektor eigen dari matriks dan kolom-kolom dari hasil kali adalah maka
sehingga diperoleh
[
] [
] [
]
dimana adalah matriks diagonal yang mempunyai nilai eigen pada diagonal utamanya. Karena vektor-vektor kolom dari bebas linear, maka mempunyai invers. Jadi (2.19) dapat dituliskan kembali sebagai dengan dapat didiagonalisasi.
Contoh 2.2
Carilah matriks yang mendiagonalkan
[ ]
Dari contoh 2.1 nilai eigen dari adalah , , dan . Vektor eigen
yang bersesuaian dengan matriks adalah [ ], [ ], dan [ ].
Akan ditunjukkan bebas linear. Berdasarkan Definisi 2.3 substitusikan , , dan pada persamaan (2.15) sehingga diperoleh
[ ] [ ] [ ]
atau secara ekuivalen menjadi
[
] [ ]
[ ]
Akan dibuktikan adalah matriks diagonal
[
]
[
] [ ]
[
] [ ]
[
]
Jadi, [ ] akan mendiagonalkan A.
B. Sistem Dinamik
Sistem dinamik terbentuk dari persamaan-persamaan diferensial baik persamaan diferensial biasa atau persamaan diferensial parsial.
Definisi 2.4 (Ross, 1984:3)
Persamaan diferensial adalah persamaan yang memuat turunan dari satu atau lebih variabel tak bebas terhadap satu atau lebih variabel bebas.
yang memuat turunan dari satu atau lebih variabel tak bebas terhadap dua atau lebih variabel bebas.
Contoh 2.3
Persamaan diferensial biasa ditunjukkan pada persamaan-persamaan berikut:
a. b. c.
Persamaan diferensial parsial ditunjukkan pada persamaan-persamaan berikut:
a. b. c.
Berdasarkan pengaruh waktu, sistem dinamik dibedakan menjadi dua yaitu sistem autonomous dan sistem nonautonomous (Campbell dan Haberman, 2008:316). Sistem autonomous adalah sistem dinamik yang secara eksplisit tidak bergantung terhadap waktu. Sistem dinamik autonomous dinyatakan sebagai
̇
̇
dimana dan secara eksplisit bukan merupakan fungsi dalam dan turunan parsial , , , dan
sistem nonautonomous adalah sistem dinamik yang secara eksplisit bergantung terhadap waktu. Sistem nonautonomous dinyatakan sebagai
̇
̇
dimana fungsi dan bergantung pada variabel bebas (Perko,2001:66).
Contoh 2.4
Sistem autonomous ditunjukkan pada sistem (2.21) berikut
̇
̇ 2.21
Sistem nonautonomous ditunjukkan pada sistem (2.22) berikut
̇
̇ 2.22
Berikut ini akan diberikan sebuah ilustrasi dari kasus pemodelan predator-prey menggunakan sistem dinamik.
C. Model Matematis Sistem Predator-Prey
1926, sehingga model predator-prey disebut juga model Lotka-Volterra (Boyce dan Diprima, 2009:534).
Laju pertumbuhan populasi prey adalah sebesar dengan adalah laju kelahiran dari prey dan adalah populasi prey. Namun, pertumbuhan populasi prey akan berkurang karena adanya predator. Besarnya pengurangan tersebut adalah dengan adalah laju penangkapan prey oleh predator, sedangkan adalah populasi predator. Dengan demikian, model dinamika pertumbuhan populasi prey ditulis sebagai berikut.
dengan dan
merupakan laju pertumbuhan prey, menyatakan adanya interaksi antara populasi prey dan predator, dan tanda negatif menyatakan bahwa laju pertumbuhan prey berkurang karena adanya interaksi prey dan predator. Persamaan (2.23) menyatakan bahwa populasi prey mengalami pertumbuhan, akan tetapi laju pertumbuhan populasinya dihambat oleh interaksi prey tersebut dengan predator.
dengan dan
merupakan laju pertumbuhan predator. Persamaan (2.24)
menyatakan bahwa laju pertumbuhan predator bertambah karena adanya interaksi dengan prey dan berkurang karena tidak ada prey. Kemudian berdasarkan persamaan (2.23) dan (2.24) diperoleh sistem predator-prey yang secara matematis ditunjukkan pada sistem (2.25) berikut.
dengan , merupakan laju kelahiran dari prey dan merupakan laju kematian alami dari predator, sedangkan merupakan parameter interaksi antara prey dan predator, interaksi yang dimaksud yaitu prey akan dimangsa oleh predator dan merupakan parameter interaksi antara predator dan prey, interaksi yang dimaksud yaitu predator akan memangsa prey. Persamaan (2.25) disebut dengan persaman Lotka-Volterra (Boyce dan Diprima, 2009:534).
D. Deret Taylor dan Deret Maclaurin Definisi 2.5 (Thomas dan Ross, 1996:672)
Misalkan dapat diturunkan hingga kali pada , maka dapat dinyatakan sebagau deret
Persamaan di atas disebut Deret Taylor dengan pusat atau disebut dengan polinomial Taylor pada . Jika , maka persamaan di atas disebut Deret Mac Laurin.
E. Sistem Linear
Menurut Perko (2001:1) sistem linear dinyatakan sebagai
̇
dengan , matriks berukuran dan
̇ [ ]
Solusi dari sistem (2.26) dengan nilai awal adalah
Selanjutnya akan dibuktikan bahwa solusi dari sistem (2.26) dengan nilai awal
adalah Bukti: ̇
dimana didefinisikan oleh deret Taylor sebagai berikut
∑
( ∑ )
∑
∑
(∑
)
̇
̇
Definisi 2.6 (Perko, 2001:33)
Matriks dikatakan nilpotent order jika dan . Contoh 2.5
Diberikan matriks
Matriks tersebut merupakan matriks nilpotent order 2. Untuk memeriksanya, harus ditunjukkan dan sebagai berikut
Berdasarkan Definisi 2.5,
adalah matriks nilpotent.
Berdasarkan nilai-nilai eigen dari matriks , bentuk dari dibagi menjadi tiga, sebagai berikut:
1. Jika matriks berukuran mempunyai sebanyak nilai eigen real yang berbeda maka bentuk menjadi (Perko, 2001:7)
[ ]
dengan adalah matriks yang mempunyai invers, dan adalah nilai eigen dari matriks , dengan , dan
[ ] [
]
sehingga persamaan (2.27) menjadi
[ ]
2. Jika matriks berukuran dengan blok sepanjang diagonal, mempunyai sebanyak nilai eigen kompleks yang berbeda maka bentuk
menjadi (Perko, 2001:29)
{ [
dengan adalah matriks yang mempunyai invers, dan nilai eigen dari matriks adalah , dengan ,
sehingga persamaan (2.27) menjadi
{ [ ]}
3. Jika matriks berukuran mempunyai sebanyak nilai eigen kembar dengan maka bentuk menjadi (Perko, 2001:33)
[ ]
dengan adalah matriks yang mempunyai invers, dan adalah nilai eigen dari matriks , dan adalah matriks nilpotent
order dengan dan komutatif yaitu , dan
[ ] sehingga persamaan (2.27) menjadi
[ ]
4. Jika matriks berukuran mempunyai sebanyak nilai eigen kembar maka bentuk menjadi (Perko, 2001:33)
[ ]
adalah matriks nilpotent order dengan dan komutatif yaitu , dan [ ] sehingga persamaan (2.27) menjadi
Contoh 2.6
Diberikan sistem dinamik linear
̇
̇
Akan dicari solusi sistem (2.28)
Penyelesaian:
Sistem (2.28) dapat ditulis dalam bentuk sebagai berikut:
[ ̇̇ ]
Dari persamaan (2.29) dimisalkan
Berdasarkan persamaan (2.3) maka diperoleh
| |
sehingga persamaan karakteristiknya adalah
dan diperoleh nilai eigen dari matriks yaitu . Kemudian berdasarkan nilai eigen tersebut diperoleh
dan
Untuk memeriksa adalah matriks nilpotent order 2, akan ditunjukkan yaitu
diperoleh
[ ]
Jadi, solusi dari sistem (2.28) adalah
[
]
F. Titik Ekuilibrium
Diberikan sistem autonomous sebagai berikut:
̇
Definisi 2.7 (Perko, 2001:102)
G. Linearisasi Sistem Nonlinear
Linearisasi merupakan proses membawa sistem nonlinear ke sistem linear. Linearisasi dilakukan untuk melihat perilaku sistem di sekitar titik ekuilibrium. Teorema 2.2 (Perko, 2001:67)
Jika mempunyai turunan di ̅, ̅ maka turunan parsial
,
ada pada ̅ dan untuk setiap berlaku
̅ ∑ ̅ Bukti: ∑ ̅ [ ̅ ̅ ̅ ] [ ̅ ̅ ̅ ] [ ̅ ̅ ̅ ] ∑ ̅ [ ̅ ̅ ̅ ̅ ̅ ̅ ̅ ̅ ̅ ] [ ] ∑ ̅ ̅
Matriks ̅
[ ̅ ̅ ̅ ̅ ̅ ̅ ̅ ̅ ̅ ]
Definisi 2.7 (Perko, 2001:102)
Diberikan matriks Jacobian ̅ . Sistem linear ̇ ( ̅ ) disebut linearisasi dari sistem ̇ di sekitar titik ̅.
H. Kestabilan Titik Ekuilibrium Definisi 2.8 (Olsder dan Woude, 2004 : 57)
Diberikan sebuah sistem dinamik ̇ dengan dan mempunyai penyelesaian dengan keadaan awal , maka
1. Titik ekuilibrium ̅ dikatakan stabil jika untuk setiap ada sedemikian sehingga jika ‖ ̅‖ maka ‖ ̅‖ untuk setiap .
2. Titik ekuilibrium ̅ dikatakan stabil asimtotik jika titik tersebut stabil dan jika ada sedemikian sehingga ‖ ̅‖ bila
‖ ̅‖ .
3. Titik ekuilibrium ̅ dikatakan tidak stabil jika tidak memenuhi (1). Teorema 2.3 (Olsder dan Woude, 2004:58)
Diberikan sistem linear ̇ dengan matriks berukuran yang memupnyai nilai eigen yang berbeda yaitu
1. Titik ekuilibrium ̅ dikatakan stabil asimtotik jika dan hanya jika
untuk setiap
2. Titik ekuilibrium ̅ dikatakan stabil jika dan hanya jika
, maka multiplisitas aljabar dan geometri untuk nilai eigen harus sama.
3. Titik ekuilibrium ̅ dikatakan tidak stabil jika dan hanya jika terdapat paling sedikit satu nilai eigen dengan untuk setiap
.
Bukti:
1. Akan dibuktikan bahwa jika titik ekuilibrium ̅ stabil asimtotik maka untuk setiap .
Berdasarkan Definisi 2.6, titik ekuilibrium ̅ dikatakan stabil asimtotik jika ‖ ̅‖ . Dengan kata lain, untuk akan menuju ̅ . Karena merupakan solusi dari sistem linear ̇ , maka
selalu memuat , akibatnya untuk akan menuju ̅ maka .
Selanjutnya, akan dibuktikan bahwa jika untuk setiap
maka titik ekuilibrium ̅ stabil asimtotik.
Solusi dari sistem linear ̇ adalah , sehingga selalu memuat . Jika , maka untuk akan menuju
̅ , sehingga berdasarkan definisi 2.6, titik ekuilibrium ̅ stabil asimtotik. 2. Akan dibuktikan bahwa jika titik ekuilibrium ̅ stabil, maka
untuk setiap
, sehingga sistem tidak stabil. Hal ini sesuai dengan kontraposisi pernyataan jika titik ekuilibrium ̅ stabil, maka untuk setiap
. Jadi, terbukti bahwa jika titik ekuilibrium ̅ stabil, maka
untuk setiap .
Selanjutnya, akan dibuktikan bahwa jika untuk setiap
maka titik ekuilibrium ̅ stabil dan jika ada nilai eigen imajiner dengan , maka multiplisitas aljabar dan geometri untuk nilai eigen harus sama.
Solusi dari sistem linear ̇ adalah , sehingga selalu memuat . Jika maka titik ekuilibrium ̅ stabil asimstotik (pasti stabil). Jika , maka nilai eigen berupa bilangan kompleks murni. Multiplisitas aljabar berhubungan dengan nilai eigen, sedangkan geometri berhubungan dengan vektor eigen. Oleh karena itu, akan dibuktikan bahwa banyak nilai eigen dan vektor eigen adalah sama.
Diambil sebarang sistem pada yang mempunyai nilai eigen bilangan kompleks murni.
[ ̇̇ ]
Nilai eigen sistem (2.32) ditentukan dengan mensubstitusikan matriks
ke dalam persamaan| | maka diperoleh | |
Persamaan karakteristik dari matriks adalah
Akar dari persamaan (2.33) adalah
√ √ √
dan diperoleh nilai eigen √ dan √
Berdasarkan definisi 2.1, adalah vektor eigen dari matriks yang bersesuaian dengan jika dan hanya jika adalah pemecahan tak trivial dari
, yakni
Untuk √ , maka (2.34) menjadi
[ √
√ ]
Sistem (2.35) ekuivalen dengan
√
√
Berdasarkan (2.36) diperoleh penyelesaian dari sistem (2.35) adalah
√ . Misalkan , vektor eigen yang bersesuaian √ yaitu
[ √ ]
Untuk √ , maka (2.34) menjadi
[ √
√ ]
√
√
Berdasarkan (2.38) diperoleh penyelesaian dari sistem (2.37) adalah √ . Misalkan , vektor eigen yang bersesuaian √ yaitu
[ √ ]
Terbukti bahwa banyaknya nilai eigen sama dengan banyaknya vektor eigen. 3. Akan dibuktikan jika titik ekuilibrium ̅ tidak stabil, maka
untuk setiap
Titik ekuilibrium ̅ dikatakan tidak stabil jika , maka akan menuju . Karena merupakan solusi dari sistem linear ̇ , maka memuat . Untuk menuju dipenuhi jika
untuk setiap .
Selanjutnya, akan dibuktikan bahwa jika untuk setiap
maka titik ekuilibrium ̅ tidak stabil.
Jika , maka solusi dari sistem linear ̇ yaitu yang memuat akan menuju . Dengan kata lain, solusi tersebut akan menjauhi titik ekuilibrium ̅ sehingga titik ekuilibrium ̅ dikatakan tidak stabil. I. Kriteria Routh-Hurwitz
Kestabilan suatu sistem dapat ditentukan dengan menggunakan nilai eigen. Nilai eigen matriks dapat ditentukan dengan persamaan karakteristik | |
dengan mudah, terutama ketika persamaan karakteristik berorde tinggi. Oleh karena itu, perlu adanya suatu kriteria yang menjamin bahwa akar-akar persamaan karakteristiknya bernilai negatif atau ada nilai akar yang bernilai positif. Salah satu kriteria yang dapat digunakan untuk menguji kestabilan sistem adalah kriteria Routh-Hurwitz.
Diberikan persamaan karakteristik nilai eigen dari matriks sebagai berikut
| |
dengan dan merupakan koefisien dari persamaan karakteristik matriks .
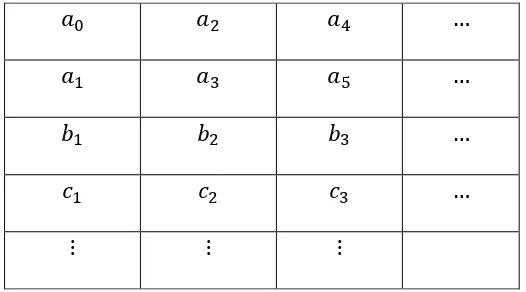
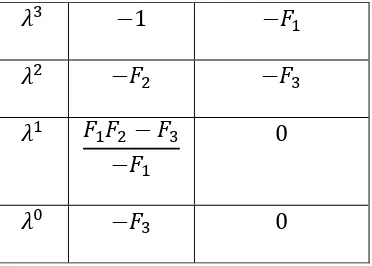
[image:47.595.181.444.478.624.2]Tabel Routh-Hurwitz merupakan tabel yang disusun berdasarkan pengurutan koefisien-koefisien dari matriks . Berikut diberikan tabel Routh-Hurwitz yang ditunjukkan pada Tabel 2.1
Tabel 2.1 Tabel Routh-Hurwitz
dengan didefinisikan sebagai berikut
Suatu sistem dikatakan stabil menurut teorema 2.3 apabila mempunyai nilai eigen dengan bagian real negatif yang ditunjukan dengan tidak adanya perubahan pada setiap elemen di kolom pertama tabel Routh-Hurwitz.
Definisi 2.9 (Olsder dan Woude, 2004:61) Diberikan polinomial
dengan , akar-akar polinomial (2.39) memiliki bagian real negatif jika dan hanya jika tabel Routh-Hurwitz terdiri dari baris dan setiap elemen di kolom pertama pada tabel tidak mengalami perubahan tanda, setiap elemen pada kolom pertama dapat bertanda positif atau negatif.
J. Bifurkasi
Pada suatu sistem dinamik yang memiliki nilai eigen nol, maka sistem tersebut rentan terhadap gangguan. Sedikit saja sistem mengalami gangguan maka nilai eigen dari sistem dapat berpindah ke daerah stabil atau ke daerah tidak stabil. Keadaan inilah yang sering disebut dengan bifurkasi yaitu perubahan kestabilan suatu sistem dinamik seiring dengan perubahan parameter.
Definisi 2.10 (Kuznetsov, 1998:57)
Bifurkasi adalah munculnya potret fase yang tidak ekuivalen secara topologi karena adanya perubahan parameter.
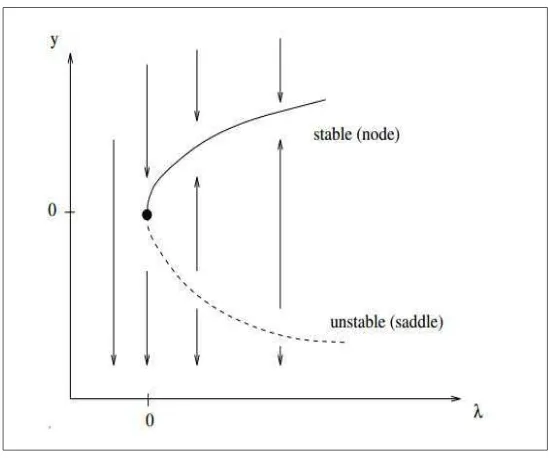
1. Bifurkasi Saddle-Nodes
[image:49.595.192.470.227.456.2]Bifurkasi saddle-nodes digambarkan dengan ̇ . Jika tidak ada solusi ekuilibrium, sedangkan pada saat terdapat dua solusi ekuilibrium yaitu solusi stabil √ dan solusi tak stabil √ . Bifurkasi ini dapat ditunjukkan oleh gambar berikut (Seydel, 2009:62) :
Gambar 2.1 Bifurkasi Saddle Nodes
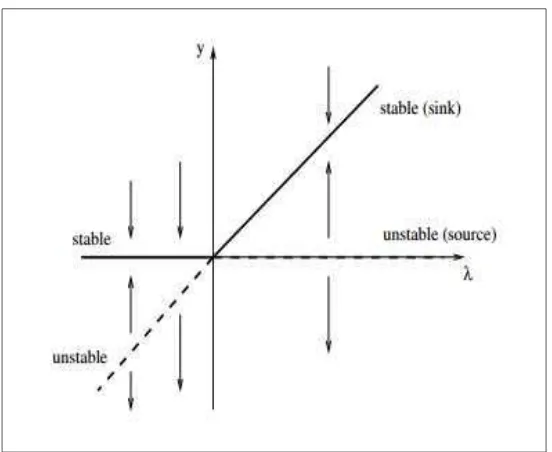
2. Bifurkasi Transkritikal
Gambar 2.2 Bifurkasi Transkritikal
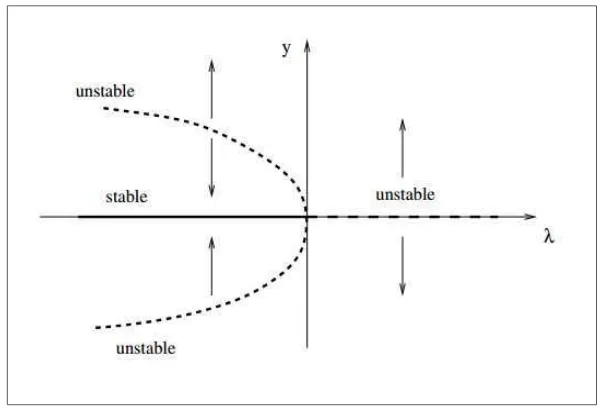
3. Bifurkasi Pitchfork
Gambar 2.3 Bifurkasi Pitchfork Superkritikal
Sedangkan bifurkasi pitchfork subkritikal digambarkan dengan persamaan diferensial ̇ . Jika tidak ada solusi ekuilibrium, sedangkan jika
ada tiga solusi ekuilibrium yaitu solusi stabil dan dua buah solusi tak stabil √ . Bifurkasi ini ditunjukkan oleh gambar sebagai berikut (Seydel, 2009 : 65) :
[image:51.595.164.463.478.682.2]4. Bifurkasi Hopf
Definisi 2.11 Bifurkasi yang bersesuaian dengan , , dengan adalah bagian imaginer dari nilai eigen yang terkait. Maka bifurkasi yang akan terjadi disebut bifurkasi Hopf atau Andronov-Hopf (Kuznetsov, 1998:80).
K. Teori Center Manifold
Kestabilan sistem yang nilai eigennya mempunyai bagian real yang bernilai nol tidak dapat dilakukan dengan melihat kestabilan linearisasi dari sistem tersebut. Oleh karena itu, untuk menentukan kestabilan sistem yang nilai eigennya mempunyai bagian real yang bernilai nol digunakan teori center manifold. Sebuah sistem persamaan diferensial didefinisikan sebagai berikut :
̇
̇
dimana :
dengan merupakan matriks dengan nilai eigen tidak hiperbolik, matriks
dengan nilai eigen hiperbolik negatif, dimana dan adalah fungsi
, dimana merupakan suatu fungsi yang selalu kontinu hingga turunan ke .
Definisi 2.12 (Wiggins, 2003 : 246)
Center manifold untuk sistem (2.40) didefinisikan sebagai
Dari persamaan (2.41) diperoleh
kemudian persamaan (2.42) diturunkan terhadap sehingga diperoleh
̇ ̇
Selanjutnya substitusikan persamaan (2.43) ke persamaan (2.40) sehingga diperoleh
̇
̇ ( )
Substitusikan persamaan (2.43) ke (2.45) sehingga diperoleh
̇ ( )
Kemudian substitusikan persamaan (2.44) ke persamaan (2.46)
( ) ( )
atau
( ) [ ( )] ( )
Persamaan (2.48) merupakan persamaan manifold center. L. Vektor Eigen Tergeneralisasi
Vektor eigen tergeneralisasi muncul jika ada nilai eigen yang sama besar. Diberikan sebuah matriks persegi berukuran .
Definisi 2.13 (Perko, 2001 : 32)
Misalkan merupakan nilai eigen dari matriks yang berukuran dengan multiplisitas . Kemudian untuk , solusi taknol dari
Contoh 2.7
Diberikan matriks
[ ]
Matriks mempunyai nilai eigen , dan dan vektor eigen
yang bersesuaian adalah [
]
dan [ ].
Kemudian harus dicari vektor eigen tergeneralisasi yang bersesuaian dengan
yaitu dengan mencari penyelesaian taknol dari
([ ] [
])
[ ] [
]
[
]
BAB III
PEMBAHASAN
A. Model Matematis Predator-Prey dengan Dua Predator 1. Asumsi Dasar
Asumsi dasar yang digunakan untuk membentuk model matematis predator-prey dengan dua predator adalah sebagai berikut:
1. Populasi pada model matematis predator-prey dengan dua predator dibagi menjadi tiga jenis yaitu populasi prey , populasi predator jenis I, dan populasi predator jenis II.
2. Laju pertumbuhan populasi prey dipengaruhi oleh laju kelahiran dan laju kematian karena adanya interaksi dengan predator jenis I atau predator jenis II.
3. Laju pertumbuhan populasi predator jenis I dan predator jenis II dipengaruhi oleh kematian alami predator dan interaksi antar predator. 4. Persediaan makanan untuk prey terbatas, sehingga ada persaingan antar
prey untuk memperebutkan makanan.
6. Persediaan makanan untuk predator jenis II bergantung pada populasi predator jenis I dan prey karena dalam model ini predator jenis II dapat memangsa predator jenis I dan prey .
[image:56.595.109.474.295.737.2]7. Interaksi antarspesies dapat terjadi setiap saat sehingga tingkat populasi masing-masing spesies dapat berubah dalam waktu yang relatif singkat. Berikut diberikan Tabel 3.1 definisi variabel dan parameter yang digunakan dalam model matematis predator-prey dengan dua predator.
Tabel 3.1 Definisi Variabel dan Parameter Variabel dan
Parameter
Definisi Syarat
Waktu
Banyaknya polulasi prey.
Banyaknya polulasi predator jenis I.
Banyaknya polulasi predator jenis II.
Laju kelahiran prey per satuan waktu. Laju kematian alami predator jenis I per
satuan waktu.
Laju kematian alami predator jenis II per satuan waktu.
Parameter interaksi antara prey dengan
sesama jenisnya per satuan waktu.
Parameter interaksi antara prey dengan
predator jenis I per satuan waktu. Interaksi
yang dimaksud yaitu prey akan dimangsa oleh predator jenis I.
Parameter interaksi antara prey dengan
predator jenis II per satuan waktu. Interaksi yang dimaksud yaitu prey akan dimangsa oleh predator jenis II.
Parameter interaksi antara predator jenis I
dengan prey per satuan waktu. Interaksi yang dimaksud yaitu predator jenis I akan memangsa prey.
Parameter interaksi antara predator jenis I
dengan predator jenis II per satuan waktu. Interaksi yang dimaksud yaitu predator jenis I akan dimangsa oleh predator jenis II.
Parameter interaksi antara predator jenis II
dengan prey per satuan waktu. Interaksi yang dimaksud yaitu predator jenis II akan memangsa prey.
Parameter interaksi antara predator jenis II
dengan predator jenis I per satuan waktu. Interaksi yang dimaksud yaitu predator jenis II akan memangsa predator jenis I.
2. Pembentukan Model Matematis Predator-Prey
Berdasarkan asumsi-asumsi dan parameter yang digunakan maka dapat dikonstruksi model matematis predator-prey.
a. Model Matematis Prey
Laju pertambahan populasi prey karena adanya kelahiran dengan laju sebesar adalah sebesar . Namun, pertumbuhan populasi prey akan berkurang karena prey lain yang sejenis yang besarnya pengurangan adalah . Selain itu, pertumbuhan populasi prey juga akan berkurang karena adanya interaksi predator jenis I dan predator jenis II. Besarnya pengurangan populasi prey karena adanya predator jenis I adalah sebesar , sedangkan besarnya pengurangan populasi karena adanya predator jenis II adalah sebesar . Dengan demikian, model dinamika pertumbuhan populasi prey ditulis sebagai berikut
Persamaan (3.1) menyatakan bahwa populasi prey mengalami pertumbuhan, akan tetapi laju pertumbuhan populasinya dihambat karena adanya interaksi antara prey tersebut dengan sesama jenisnya maupun dengan predator jenis I dan predator jenis II .
b. Model Matematis Predator Jenis I
karena adanya predator jenis II dan besarnya pengurangan adalah sebesar
. Dengan demikian, model dinamika pertumbuhan populasi predator
jenis I ditulis sebagai berikut
Persamaan (3.2) menyatakan bahwa pertumbuhan predator jenis I akan bertambah karena adanya prey dan berkurang karena adanya predator jenis II maupun karena tidak adanya prey.
c. Model Matematis Predator Jenis II
Pertumbuhan populasi predator jenis II karena tidak adanya prey dan predator jenis II akan berkurang. Besarnya pengurangan tersebut adalah , dengan adalah laju kematian alami predator jenis II. Namun, pertumbuhan populasi predator jenis II akan bertambah karena adanya prey dan besarnya pertambahan tersebut adalah . Di sisi lain, pertumbuhan populasi predator jenis I juga akan bertambah karena adanya predator jenis I dan besarnya penambahan adalah sebesar . Dengan demikian, model dinamika pertumbuhan populasi predator jenis I ditulis sebagai berikut
Dari persamaan (3.1) – (3.3) di atas, diperoleh model matematis predator-prey dengan dua predator berupa sistem persamaan diferensial nonlinear sebagai berikut.
Sistem (3.4) ekuivalen dengan sistem (3.5) sebagai berikut.
B. Titik Ekuilibrium Model Predator-Prey dengan Dua Predator
Ada beberapa kemungkinan yang terjadi untuk masing-masing jenis populasi, sehingga ada beberapa kemungkinan titik ekuilibrium berdasarkan keadaan populasinya. Berdasarkan Definisi 2.7, titik ekuilibrium pada model matematis predator-prey dengan dua predator diperoleh jika
,
,
dan
.
Jika
, maka menurut persamaan (3.5a) menjadi
atau
Jika
, maka menurut persamaan (3.5b) menjadi
sehingga diperoleh
atau
Jika
, maka menurut persamaan (3.5c) menjadi
sehingga diperoleh
atau
Berdasarkan persamaan (3.6), (3.8), dan (3.10) maka diperoleh titik ekuilibrium adalah
Selanjutnya akan dikaji untuk
Berdasarkan persamaan (3.10), persamaan (3.9) menjadi
Kemudian persamaan (3.10) dan (3.12) disubstitusi ke dalam persamaan (3.7) menjadi ( ) dan diperoleh
Berdasarkan persamaan (3.10), (3.12), dan (3.13), maka diperoleh titik ekuilibrium adalah
(
)
Kemudian akan dikaji untuk
Berdasarkan persamaan (3.8), maka persamaan (3.11) menjadi
sehingga diperoleh
Berdasarkan persamaan (3.8), (3.14), dan (3.15), maka diperoleh titik ekuilibrium adalah
(
)
Selanjutnya akan dikaji untuk dan
Berdasarkan persamaan (3.8) dan (3.10), persamaan (3.7) menjadi
sehingga diperoleh
Berdasarkan persamaan (3.8), (3.10), dan (3.16), maka diperoleh titik ekuilibrium adalah
(
)
Kemudian untuk menentukan titik ekuilibrium dilakukan dengan langkah-langkah sebagai berikut.
Persamaan (3.9) dapat ditulis kembali menjadi
sehingga diperoleh
Selanjutnya, persamaan (3.11) dapat ditulis kembali menjadi
Substitusi persamaan (3.17) dan (3.18) ke persamaan (3.7) sehingga diperoleh
(
) (
)
atau
(
) (
)
Persamaan di atas dapat ditulis kembali menjadi
(
)
Dari persamaan di atas diperoleh
Substitusi persamaan (3.19) ke persamaan (3.9) sehingga diperoleh
(
)
atau
Dari persamaan di atas diperoleh
(
)
atau
Dari persamaan di atas diperoleh
Berdasarkan persamaan (3.19), (3.20), dan (3.21) diperoleh bahwa titik ekuilibrium adalah dengan
Berdasarkan uraian di atas, dapat disimpulkan bahwa titik ekuilibrium model matematis predator-prey dengan dua predator diperoleh sebagai berikut. 1. , yaitu keadaan dimana populasi prey tidak ada, sehingga
populasi predator jenis I dan predator jenis II akan musnah karena tidak ada makanan.
2. Jika , , dan maka diperoleh titik ekuilibrium
3. Jika , , dan maka diperoleh titik ekuilibrium
yaitu keadaan dimana populasi prey dan predator jenis II ada, sementara predator jenis I tidak ada.
4. Jika , , dan maka diperoleh titik ekuilibrium
yaitu keadaan dimana populasi prey ada, sementara predator jenis I dan predator jenis II tidak ada.
5. Jika , , dan maka diperoleh titik ekuilibrium
dimana
yaitu keadaan dimana populasi prey, dan predator jenis I, dan predator jenis II ada.
C. Analisis Kestabilan Titik Ekuilibrium
Sistem (3.5) merupakan sistem nonlinear, sehingga untuk menentukan kestabilan dari masing-masing titik ekuilibrium diperlukan matriks Jacobian dan nilai eigen. Misalkan
maka
Berdasarkan (3.22), (3.23), (3.24), (3.25), (3.26), (3.27), (3.28), (3.29), dan (3.30) diperoleh matriks Jacobian dari model matematis sistem predator-prey dengan dua predator adalah sebagai berikut :
[
]
Kestabilan pada setiap titik ekuilibrium akan diperiksa sebagai berikut : 1. Kestabilan titik ekuilibrium
[
]
Selanjutnya akan dicari nilai eigen dari Berdasarkan persamaan (2.3), maka diperoleh
|
|
sehingga persamaan karakteristiknya adalah
Berdasarkan (3.32) diperoleh nilai eigen sebagai berikut :
Karena merupakan parameter yang bernilai positif, maka titik tidak stabil karena .
2. Kestabilan titik ekuilibrium
Untuk titik ekuilibrium
Selanjutnya akan dicari nilai eigen dari
Berdasarkan persamaan (2.3), maka diperoleh
| | | |
sehingga persamaan karakteristiknya adalah
( ) ( )
Berdasarkan (3.34) diperoleh nilai eigen sebagai berikut
√
Nilai eigen , , dan dapat bernilai positif atau negatif tergantung dari nilai-nilai parameter-parameterrnya. Nilai eigen bernilai negatif jika
Sedangkan nilai eigen mempunyai bagian real negatif jika
Karena dan selalu bernilai positif, maka nilai eigen mempunyai bagian real negatif jika
3. Kestabilan titik ekuilibrium
Untuk titik ekuilibrium
diperoleh matriks Jacobian ( ) [ ]
Selanjutnya akan dicari nilai eigen dari
Berdasarkan persamaan (2.3), maka diperoleh
| | | |
sehingga persamaan karakteristiknya adalah
( )
Berdasarkan (3.36) diperoleh nilai eigen sebagai berikut
√
Nilai eigen , , dan dapat bernilai positif atau negatif tergantung dari nilai-nilai parameter-parameterernya. Nilai eigen bernilai negatif jika
Sedangkan nilai eigen mempunyai bagian real negatif jika
[ ]
Karena dan selalu bernilai positif, maka nilai eigen mempunyai bagian real negatif jika
4. Kestabilan titik ekuilibrium
Untuk titik ekuilibrium
diperoleh matriks Jacobian
( ) [ ]
Berdasarkan persamaan (2.3), maka diperoleh
| | | |
Berdasarkan (3.38) diperoleh nilai eigen sebagai berikut
Nilai eigen selalu bernilai negatif karena , sedangkan nilai eigen dan dapat bernilai positif atau negatif tergantung dari nilai-nilai parameternya. Titik
stabil jika semua nilai eigennya bernilai negatif, sehingga titik ekuilibrium
stabil jika
dan
.
5. Kestabilan titik ekuilibrium
Untuk titik ekuilibrium diperoleh matriks Jacobian
(
)
dengan
|
|
| |
sehingga persamaan karakteristiknya adalah
( )
Persamaan (3.40) dapat dimisalkan sebagai berikut
sehingga diperoleh persamaan karakteristik baru sebagai berikut
Dengan menggunakan kriteria Routh Hurwitz, maka berdasarkan persamaan (3.42) diperoleh
Tabel 3.2 Tabel Routh-Hurwitz untuk Titik Ekuilibrium
Berdasarkan kriteria Routh-Hurwitz, sistem (3.5) stabil pada , jika dan hanya jika pada kolom pertama setiap entrinya bernilai negatif, dengan syarat ,
, .
D. Sistem dengan Dua Parameter Bebas
Pada subbab ini beberapa parameter pada sistem (3.5) akan dibuat bernilai tetap (fixed) sehingga hanya tersisa dua parameter bebas. Penentuan berdasarkan penelitian yang dilakukan oleh M. Rafikov, J.M. Balthazar, dan H.F. von Bremen tentang sistem predator-prey diberikan nilai-nilai parameter pada tabel berikut.
Tabel 3.3 Nilai parameter pada sistem (3.5) (M. Rafikov et al, 2008:560)
Parameter Nilai Parameter Parameter Nilai Parameter
[image:74.595.168.477.571.716.2]
Nilai-nilai parameter yang diberikan tersebut akan disubstitusikan ke sistem persamaan (3.5). Kecuali parameter dan , nilai masing-masing parameter sama dengan yang ada pada tabel 3.3. Parameter merepresentasikan laju kematian predator jenis I, sedangkan parameter merupakan laju kematian predator jenis II.
Kemudian akan disubstitusikan nilai parameter-parameter yang bersesuaian pada sistem (3.5), sehingga diperoleh sistem baru sebagai berikut:
1. Titik Ekuilibrium
Berdasarkan perhitungan pada subbab B, dapat diketahui titik-titik ekuilibrium dari sistem (3.44) adalah
( )
2. Analisis Kestabilan
a. Analisis Kestabilan pada Titik Ekuilibrium
Untuk menganalisa kestabilan sistem (3.44) pada titik ekuilibrium substitusi nilai parameter yang bersesuaian ke persamaan (3.33) sehingga diperoleh nilai eigen sebagai berikut.
Karena nilai selalu bernilai positif maka sistem tidak stabil di titik . b. Analisis Kestabilan pada Titik Ekuilibrium
Untuk menganalisa kestabilan sistem (3.44) pada titik ekuilibrium
substitusi nilai parameter yang bersesuaian ke
persamaan (3.35) sehingga diperoleh nilai eigen sebagai berikut.
√
√
c. Analisis Kestabilan pada Titik Ekuilibrium
Untuk menganalisa kestabilan sistem (3.44) pada titik ekuilibrium
substitusi nilai parameter yang bersesuaian ke
persamaan (3.37) sehingga diperoleh nilai eigen sebagai berikut.
√
√
Nilai bergantung terhadap parameter dan , sedangkan nilai dan hanya bergantung terhadap parameter saja. Jika akan didapatkan dan , sedangkan jika dan didapatkan , sehingga dimungkinkan terjadi bifurkasi.
d. Analisis Kestabilan pada Titik Ekuilibrium
Untuk menganalisa kestabilan sistem (3.44) pada titik ekuilibrium
substitusi nilai parameter yang bersesuaian ke persamaan (3.39) sehingga diperoleh nilai eigen sebagai berikut.
Jika akan didapatkan dan , sedangkan jika
Karena nilai bergantung terhadap parameter dan nilai bergantung terhadap parameter , sehingga jika dan maka sistem stabil di titik . Sedangkan jika nilai dan akan didapatkan
dan , sehingga dimungkinkan terjadinya bifurkasi. e. Analisis Kestabilan pada Titik Ekuilibrium
Untuk menganalisa kestabilan sistem (3.44) pada titik ekuilibrium
dapat dilihat tabel 3.1. Pada
tabel 3.1 perlu diselidiki nilai-nilai dari , , dan . Substitusikan nilai parameter-parameter yang bersesuaian ke persamaan (3.41) dan diperoleh
[ ]
dengan
Berdasarkan kriteria Routh-Hurwitz, sistem (3.44) stabil pada titik ekuilibrium
jika dan hanya jika kolom
harus positif. Jika dan , maka , , dan
bernilai nol. Dengan kata lain, kestabilan sistem pada titik ekuilibrium tidak dapat ditentukan dengan kriteria Routh-Hurwitz jika ada entri dari kolom pertama tabel Routh-Hurwitz yang bernilai nol, sehingga kestabilan sistem pada titik ekuilibrium dapat ditentukan dengan kriteria Routh-Hurwitz jika
dan .
3. Transformasi Sistem
Setelah dilakukan analisa pada sistem (3.44) didapatkan nilai eigen bernilai nol ketika