110
7. RANCANG BANGUN APLIKATOR CAIRAN
Pendahuluan
Pada praktek pertanian presisi peralatan digunakan untuk membawa dan mendistribusikan bahan cair dan padat. Pendistribusian bahan padat bisa berupa bibit tanaman, pupuk, fungisida dan bahan pengkondisi kesuburan tanah. Sedangkan pendistribusian bahan cair adalah berupa air untuk irigasi, herbisida, insektisida dan pupuk cair. Dalam kegiatan pengendalian gulma keberadaan aplikator cairan sangat penting mengingat metode pemberantasan gulma biasa dilakukan dengan cara mendistribusikan bahan aktif pemberantas gulma yang dilarutkan dalam air.
Penyemprotan cairan pengendali gulma pada praktek pertanian presisi membutuhkan peralatan yang memiliki kemampuan untuk mendistribusikan herbisida yang tepat lokasi dan tepat dosis, sehingga kegiatan yang dilakukan mampu mengendalikan gulma dengan efektif dan ramah lingkungan.
Penelitian Real-time VRA (Variable Rate Application) dengan teknologi PWM untuk pengendalian gulma pada lahan terbuka telah dilakukan di Thailand dengan memanfaatkan webcam sebagai sensor dan pengatur kerja pompa penyemprot. Pada penelitian tersebut masih banyak kekurangan terutama dari segi ketelitian hasil kerja yang diakibatkan oleh penentuan luas satu perlakuan. Hasil dari penelitian tersebut masih membuka peluang bagi penelitian lanjutan dengan menggunakan metode kerja sistem yang baru, yaitu dengan membagi citra menjadi beberapa bagian yang lebih kecil, serta penggunaan aktuator ganda untuk meningkatkan ketelitian kinerja Real-time VRA.
Tujuan penelitian ini adalah merancang alat aplikator cair dengan pengontrol PWM (Pulse Width Modulator) dan merancang aplikasi penyemprotan ganda untuk meningkatkan ketelitian kerja sesuai dengan kondisi di lapangan, dengan input yang berasal dari aplikasi untuk menduga kepadatan gulma.
Metode
Rancang bangun aplikator cairan berbasis sensor dilakukan sebagai langkah akhir setelah penembangan sistem pendeteksi kepadatan serangan gulma baik
111 pada lahan terbuka maupun lahan tertutup selesai dilakukan. Alat dan bahan yang digunakan antara lain :
- Komputer jinjing
- Mikrokontroler AT89S51
- DT HiQ UBB ISP AT89S sebagai uploader program ke mikrokontroler. - EMS H-Bridge 30A sebagai modul penggerak motor listrik
- Motor listrik CCB SUMO, 12 Volt. - Baterai 12V-7A
- Kamera digital
- Sensor Magnet dan magnet lempengan
- Bahasa pemrograman C# untuk pembuatan program pengolah citra - Bahasa Assembler untuk pengaturan kinerja mikrokontroler
Adapun tahapan perancangan yang dilakukan meliputi perancangan perangkat lunak, rancangan struktural, rancangan fungsional, penentuan mekanisme pengiriman dan penerimaan data, dan penentuan nilai PWM (Pulse Width
Modulator). Mekanisme kerja rancangan alat yang akan dibangun adalah
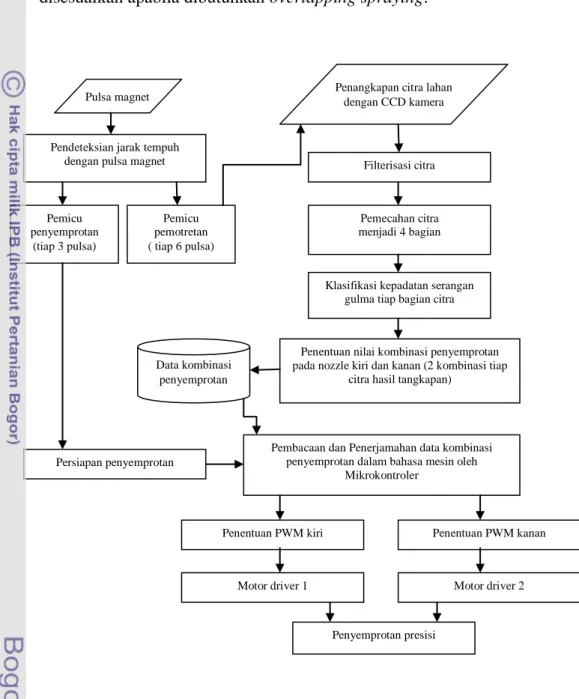
sebagaimana diagram alir yang ditampilkan pada Gambar 58.
Hasil dan Pembahasan Perancangan Perangkat Lunak
Perangkat lunak yang dibangun adalah aplikasi penentu tingkat kepadatan gulma pada lahan terbuka. Aplikasi dibangun dengan bahasa pemrograman C# (C Sharp). Gambar 59 menunjukkan tampilan aplikasi pada saat penentuan tingkat serangan gulma pada lahan terbuka.
Rancangan Struktural
1. Dudukan Penyemprot
Bagian rangka dudukan penyemprot merupakan bagian penentu dari posisi nozzle dari atas permukaan tanah. Terdapat tiga sumbu gerak bebas pada bagian ini. Batang horizontal dapat digeser maju mundur disesuaiakan dengan pembacaan sinyal magnet untuk keperluan penentuan waktu aktivasi penyemprotan. Batang vertikal memiliki gerak bebas naik atau turun agar dapat mengatur tinggi semprotan yang sesuai dengan target
112 penyemprotan dan overlapping yang diinginkan. Komponen terakhir yaitu batang dudukan nozzle terbuat dari besi siku dengan lubang-lubang berjarak 5 cm sebagai tempat nozzle, tujuannya agar nozzle dapat disesuaikan apabila dibutuhkan overlapping spraying.
Gambar 58. Diagram alir mekanisme kerja alat penyemprot berbasis sensor. Penangkapan citra lahan
dengan CCD kamera Pulsa magnet
Pendeteksian jarak tempuh dengan pulsa magnet
Pemicu pemotretan ( tiap 6 pulsa) Pemicu penyemprotan (tiap 3 pulsa) Filterisasi citra Pemecahan citra menjadi 4 bagian
Klasifikasi kepadatan serangan gulma tiap bagian citra
Penentuan nilai kombinasi penyemprotan pada nozzle kiri dan kanan (2 kombinasi tiap
citra hasil tangkapan) Data kombinasi
penyemprotan
Pembacaan dan Penerjamahan data kombinasi penyemprotan dalam bahasa mesin oleh
Mikrokontroler Persiapan penyemprotan
Penentuan PWM kiri Penentuan PWM kanan
Motor driver 1 Motor driver 2
113 Gambar 59. Desain antarmuka perangkat lunak pengolahan citra dan
klasifikasi serangan gulma. 2. Komponen Mekatronika
Perangkat mekatronika merupakan bagian yang mengatur kapan citra lahan akan diambil dan kapan penyemprot diaktivasi serta mengatur seberapa besar tingkat penyemprotannya. Proses pemotretan dan penyemprotan dilakukan dengan mengaplikasikan algoritma kerja alat berdasarkan desain yang telah dibuat. Adapun perangkat lunak digunakan untuk mengolah citra yang telah diambil dan hasil olahan tersebut menjadi penentu tingkat penyemprotan yang akan dilakukan pada lahan.
Nilai kombinasi yang dihasilkan oleh aplikasi penduga kepadatan gulma selanjutnya dijadikan sebagai perintah pada sistem kontrol. Mikrokontroler AT89S51 akan mengolah nilai tersebut kembali menjadi 2 buah nilai kepadatan gulma untuk bagian kiri dan kanan (A dan B). Setelah itu, mikrokontroler akan mengatur duty cycle dari modulasi lebar pulsa dan mengirimkan pulsa tersebut ke modul penggerak pompa DC yaitu EMS 30 A.
Rancangan Fungsional
1. Pencacah jarak tempuh
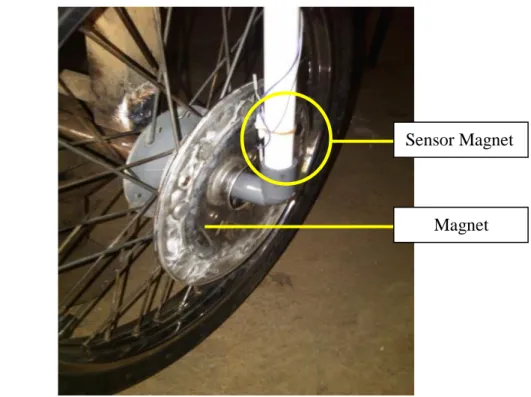
Pencacah jarak digunakan sebagai pencacah jarak yang telah ditempuh dan sekaligus sebagai pemicu proses yang lain. Pencacah jarak tempuh bekerja dengan menggunakan sensor magnet. Sensor ini akan mengalirkan arus dengan tegangan sebesar 5V ke salah satu pin I/O dari
114 mikrokontroler ketika magnet dekat dengannya. Sebaliknya, arus dan tegangan tersebut tidak akan diteruskan ke mikrokontroler jika tidak ada magnet yang berdekatan dengannya.
Pemicu diletakkan tepat di samping roda yang telah terpasang
piringan akrilik dengan 10 buah magnet. Penentuan jumlah magnet didasarkan garis tengah roda yaitu 54 cm. Sehingga setiap sensor
terdeteksi mengartikan bahwa jarak yang telah ditempuh roda adalah : (54 cm x 3.14) / 10 = 16.96 cm. Dari perhitungan tersebut, dalam keadaan
steady, setiap 3 kali sensor terbaca, proses penyemprotan harus dilakukan,
sedangkan untuk pengambilan dan pengolahan citra dilakukan setiap pembacaan sensor dengan kelipatan angka 6.
Gambar 60. Sensor magnet pencacah jarak tempuh.
2. Pengambilan Citra
Peralatan yang dibangun didesain untuk bekerja pada panjang citra 102 cm. Format citra yang digunakan adalah 640 x 480 pixel. Dalam penelitian ini pengambilan citra dilakukan berdasarkan trigger yang dikirim oleh pencacah jarak, yaitu setiap kelipatan 6. Hal ini didasarkan
Sensor Magnet
115 pada perhitungan : 6 x 16.96 cm = 101.76 cm yang nilainya mendekati 102 cm dengan selisih 0.24 cm atau 0.26%.
3. Proses Penyemprotan
Proses penyemprotan adalah proses terakhir dari satu siklus pekerjaan sistem ini. Setelah dipicu oleh sensor magnet, mikrokontroler akan mengambil data tingkat kepadatan gulma yang ada pada sebuah variabel di aplikasi pengolah citra dengan sebelumnya mengirim sebuah karakter sebagai tanda bahwa mikrokontroler meminta data tersebut dan
sprayer akan mulai melakukan penyemprotan. Spesifikasi penyemprot
yang digunakan ditampilkan pada Lampiran 5.
Pengiriman dan Penerimaan Data
USB (Universal Serial Bus) port yang digunakan pada komputer diatur dengan menggunakan baudrate dan data bits yang sama dengan pengaturan pada mikrokontroler. Tabel 17. menampilkan pengaturan yang diberikan pada USB Port pada komputer.
Tabel 17. Konfigurasi USB Port untuk komunikasi data
Properties Keterangan
Nama Port COM6
Baud Rate 9600
Data Bits 8
Parity None
Stop Bits 1
Penentuan Nilai Modulasi Lebar Pulsa
Penentuan nilai PWM menggunakan bentuk gelombang pulsa kotak dimana lebar pulsa adalah hasil modulasi dalam keragaman dari nilai rata-rata bentuk gelombang. Bila pulsa dinyatakan dalam f(t) dengan nilai minimum
ymin dan nilai maksimum ymax dan duty cycle dinyatakan dalam D, maka nilai rata-rata bentuk gelombang dinyatakan sebagai berikut :
116 ( 19 )
ymax pada nilai t di selang dan ymin pada nilai t di selang , maka persamaan menjadi sebagai berikut :
( 20 ) Berdasarkan persamaan tersebut dapat dilihat bahwa pada ymin = 0 maka nilai , hal tersebut berarti nilai rata-rata sinyal ( ) tergantung secara langsung pada nilai duty cycle (D).
Penentuan lebar pulsa yang digunakan didasarkan pada nilai yang digunakan dalam penelitian sebelumnya (Thangkowit, 2006). Dalam penelitian Thangkowit (2006), besar duty cycle yang digunakan dan besar debit aplikator cair dapat dijelaskan pada Tabel 18. Karena penelitian tersebut menggunakan dua buah sprayer dengan perlakuan seragam, maka pada penelitian yang dilakukan memiliki target debit per nozzle sebesar setengah dari debit yang dirancang oleh Thangkowit (2006). Tabel berikut menampilkan debit penyemprotan untuk masing-masing tingkat kelas.
Tabel 18. Konfigurasi nilai PWM (Thangkowit, 2006)
Kelas PWM (% duty cycle) Debit (l/menit)
1 0 0
2 50 1.78
3 70 2.32
4 90 2.6
Tabel 19. Desain duty cycle PWM yang digunakan dalam sistem Kelas PWM (% duty cycle) PWM Debit (l/menit)
1 0 0 0
2 67 167 0.85
3 88 226 1.15
117
Spesifikasi Sprayer Elektrik
1. Hubungan antara Tinggi dan Lebar Penyemprotan
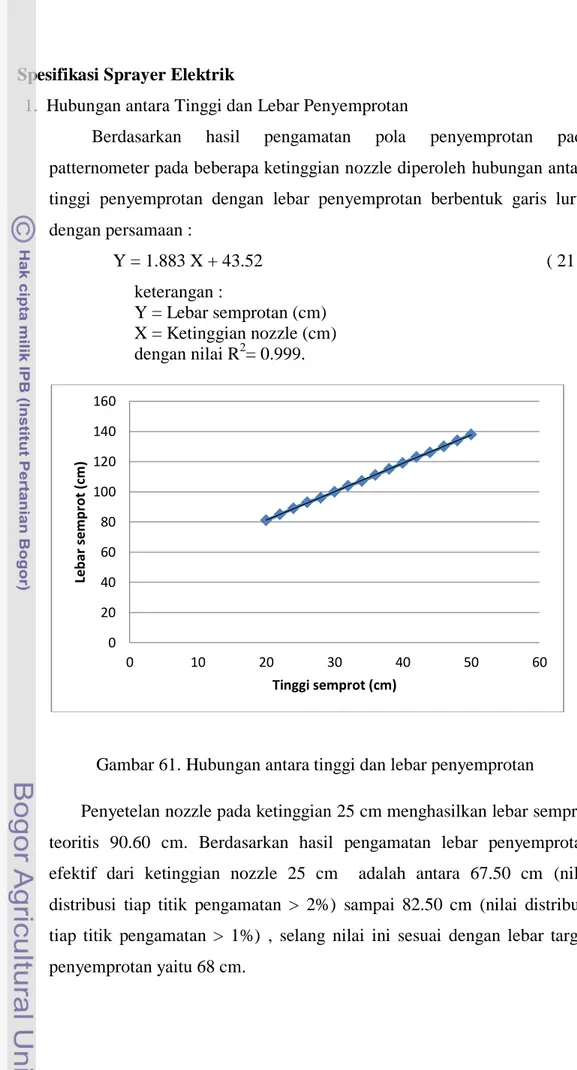
Berdasarkan hasil pengamatan pola penyemprotan pada patternometer pada beberapa ketinggian nozzle diperoleh hubungan antara tinggi penyemprotan dengan lebar penyemprotan berbentuk garis lurus dengan persamaan : Y = 1.883 X + 43.52 ( 21 ) keterangan : Y = Lebar semprotan (cm) X = Ketinggian nozzle (cm) dengan nilai R2= 0.999.
Gambar 61. Hubungan antara tinggi dan lebar penyemprotan
Penyetelan nozzle pada ketinggian 25 cm menghasilkan lebar semprot teoritis 90.60 cm. Berdasarkan hasil pengamatan lebar penyemprotan efektif dari ketinggian nozzle 25 cm adalah antara 67.50 cm (nilai distribusi tiap titik pengamatan > 2%) sampai 82.50 cm (nilai distribusi tiap titik pengamatan > 1%) , selang nilai ini sesuai dengan lebar target penyemprotan yaitu 68 cm. 0 20 40 60 80 100 120 140 160 0 10 20 30 40 50 60 Le b ar sem p rot ( cm ) Tinggi semprot (cm)
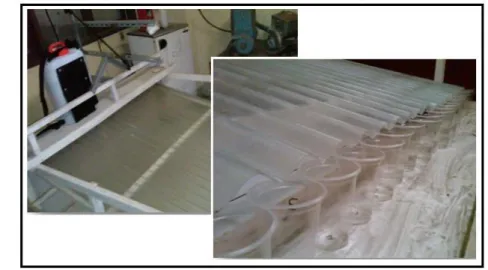
118 2. Pengujian debit dan distribusi hasil penyemprotan
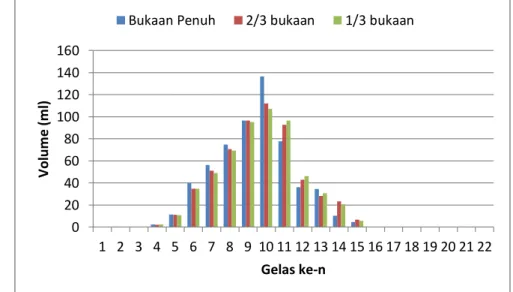
Pengujian distribusi penyemprotan dilakukan dengan menggunakan alat patternometer (Gambar 62). Alat uji yang digunakan menggunakan lebar amatan terkecil 7.5 cm dengan wadah gelas sebagai wadah pengumpul hasil penyemprotan. Gambar 63 dan Gambar 64 secara berturut-turut memperlihatkan pola distribusi air dari sprayer elektrik dengan bukaan katup dan perlakuan PWM. Data selengkapnya dari uji distribusi penyemprotan dengan PWM ditampilkan pada Lampiran 6, dan data hasil uji distribusi penyemprotan dengan bukaan katup kran ditampilkan pada Lampiran 7.
Gambar 62. Alat uji distribusi penyemprotan (Patternometer).
Volume dari setiap kolom pada penggunaan bukaan katup (Gambar 63) menunjukkan pada umumnya volume bukaan penuh pada bagian kiri merupakan debit yang paling tinggi sedangkan pada bagian kanan, hampir seluruh volume bukaan penuh merupakan nilai yang paling rendah. Berdasarkan fakta tersebut maka penggunaan bukaan katup sebagai metode pengontrolan debit penyemprotan tidak sesuai dengan tujuan pengontrolan. Hal ini disebabkan oleh tidak konsistennya hasil penyemprotan bagian kanan dan bagian kiri.
Pengamatan terhadap penggunaan PWM sebagai alat kontrol penyemprotan (Gambar 64) menunjukkan hampir seluruh volume dengan PWM sebesar 255 menjadi nilai tertinggi pada setiap kolom. Pola
119 penyemprotan sisi kiri dan sisi kanan menunjukkan hasil yang lebih konsisten.
Berdasarkan hasil ujicoba pengontrolan debit penyemprotan dengan dua metode tersebut, maka pengontrolan dengan menggunakan PWM dapat disimpulkan bahwa penggunaan PWM menghasilkan debit semprotan yang lebih baik sesuai dengan perintah kontrol yang diberikan.
Gambar 63. Distribusi air hasil penyemprotan dengan bukaan katup
Gambar 64. Distribusi air hasil penyemprotan dengan perlakuan PWM
0 20 40 60 80 100 120 140 160 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 V ol u m e ( m l) Gelas ke-n
Bukaan Penuh 2/3 bukaan 1/3 bukaan
0 20 40 60 80 100 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 V ol u m e ( m l) Gelas ke-n pwm 255 pwm 226 pwm 167
120
Uji Kinerja Sistem
a. Pengujian respon penyemprotan
Pengujian respon penyemprotan dilakukan dengan menggunakan 6 buah citra secara acak dengan satu nozzle di bagian kanan. Citra yang terpilih adalah citra nomor 4, 5, 6, 5, 23, dan 25 yang kemudian disusun berurutan sehingga menghasilkan 12 kelas kepadatan gulma bagian kanan secara berturut-turut 4, 4, 1, 1, 2, 2, 1, 1, 3, 3, 1, dan 1. Penyusunan secara berurutan bertujuan untuk mengetahui respon sistem pada kondisi operasional secara kontinyu.
b. Perbandingan hasil penyemprotan 2 nozzle dengan perlakuan tunggal dan perlakuan ganda
Gambar 65 menunjukkan jumlah cairan yang harus disemprotkan berdasarkan hasil peta perlakuan yang ditunjukkan pada Gambar 52, dan debit yang ada pada Tabel 19 menunjukkan bahwa dosis penyemprotan total untuk penyemprotan dengan perlakuan tunggal adalah sebesar 0.756 liter sedangkan dosis penyemprotan total untuk penyemprotan dengan perlakuan ganda adalah sebesar 0.649 liter. Kedua nilai tersebut menunjukkan adanya penghematan penggunaan cairan hingga 14% jika sebuah citra dibagi menjadi 4 citra. Hasil perhitungan tersebut tidak berarti bahwa penerapan Penghematan penggunaan herbisida tergantung pada sebaran dan kepadatan gulma yang ada di lahan. Penerapan metode pemecahan citra secara jelas menunjukkan ketelitian aplikasi dari segi dosis dan ketepatan lokasi, sehingga pemberantasan gulma akan lebih efektif , efisien, dan ramah lingkungan.
Dari analisa nilai rata-rata klasifikasi menunjukkan 9 citra memiliki rata-rata nilai perlakuan lebih besar, 11 citra memiliki rata-rata nilai perlakuan lebih kecil, dan 6 citra memiliki rata-rata nilai perlakuan sama. c. Uji ketepatan aktivasi penyemprotan
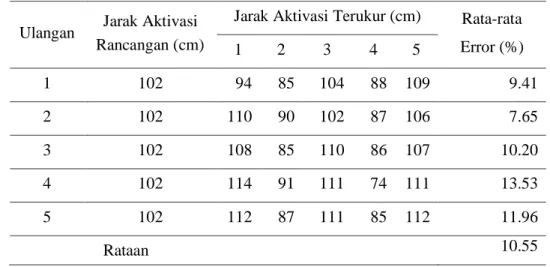
Ketepatan aktivasi diukur dengan jarak aktivasi semprotan sprayer. Jarak tersebut kemudian dibandingkan dengan jarak teoritis pada saat perancangan alat (102 cm). Lampiran 8 menampilkan data lengkap uji aktivasi penyemprotan yang secara ringkas dapat dilihat pada Tabel 20.
121
(a) Penyemprotan nozzle tunggal (b) Penyemprotan nozzle ganda
dengan ukuran 102 cm x 136 cm dengan ukuran 51 cm x 68 cm Gambar 65. Perbedaan pola nilai penyemprotan tunggal (a) dan pola
122 Nilai error rata-rata yang dihasilkan dari pengujian ketepatan aktivasi adalah sebesar 10.55% dengan hasil pengukuran jarak dengan pola yang sama. Hal ini dapat disebabkan oleh aktivasi yang dilakukan oleh pemicu. Untuk mengaktivasi pengambilan citra, pencacah mikrokontroler berada pada hitungan ke-6 akan tetapi pada saat pengujian aktivasi pengambilan citra dilakukan pada saat pencacah berada pada hitungan manual ke-5 atau pada hitungan manual ke-6. Letak magnet yang berdekatan dan sensor magnet juga dapat mempengaruhi terjadinya hal tersebut.
Tabel 20. Hasil pengujian aktivasi penyemprotan
Ulangan Jarak Aktivasi Rancangan (cm)
Jarak Aktivasi Terukur (cm) Rata-rata Error (%) 1 2 3 4 5 1 102 94 85 104 88 109 9.41 2 102 110 90 102 87 106 7.65 3 102 108 85 110 86 107 10.20 4 102 114 91 111 74 111 13.53 5 102 112 87 111 85 112 11.96 Rataan 10.55
d. Uji ketelitian dosis dan respon aktuator
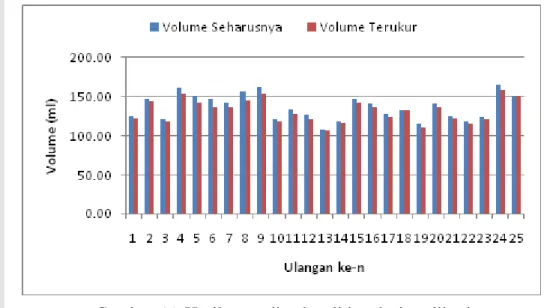
Ketelitian dosis aplikasi dan respon aktuator dilakukan dengan mengukur volume total yang keluar dari nozzle pada pengujian yang dilakukan secara kontinyu pada berbagai nilai PWM tanpa menggunakan kombinasi PWM = 0, dan membandingkan dengan volume teoritis dari dosis hasil perancangan. Gambar 66 menampilkan perbandingan volume penyemprotan hasil ujicoba dan volume secara teoritis, data lengkapnya ditampilkan pada Lampiran 8. Pada gambar tersebut terlihat bahwa volume semprotan terukur selalu lebih kecil dari volume yang seharusnya (volume teoritis), akan tetapi nilainya selalu mendekati nilai volume teoritis. Nilai volume aktual yang lebih kecil disebabkan karena respon aktuator yang lambat, dimana suatu nilai PWM baru akan mencapai debit yang stabil setelah 3 detik pengoperasian sedangkan lama operasi untuk
123 tiap dosis hanya 0.38 detik. Hasil pengujian dengan tidak memasukkan variasi PWM = 0 menunjukkan bahwa rataan error yang terjadi sebesar 3.47%. Bila nilai PWM = 0 dimasukkan dalam proses uji coba, maka nilai error akan semakin besar. Hal ini disebabkan karena untuk mencapai nilai debit yang stabil dari kondisi PWM=0 membutuhkan waktu yang lebih besar dari waktu operasi penyemprotan yang harus dilakukan.
Keterbatasan respon aktuator dapat diatasi dengan cara memperpendek pipa penghantar cairan dan penggunaan pompa air yang bekerja dengan stabil dan lebih responsif terhadap perubahan lebar pulsa catu daya .
Gambar 66. Hasil pengujian ketelitian dosis aplikasi
e. Analisa penyemprotan bertumpuk
Penyemprotan bertumpuk dalam praktek pertanian terjadi pada penyemprotan dengan skala luas dimana penggunaan nozzle tunggal sudah tidak memungkinkan. Nilai overlap yang terjadi pada penyemprotan dengan nozzle ganda biasanya berkisar antara 30% sampai 50%.
Tidak hanya pola penyemprotan, penggunaan lebih dari satu nozzle, ketinggian dan jarak pemasangan aplikator cair pun dapat menentukan ketepatan penyemprotan cairan (Miller A. dan Bellinder R, 2001).
124 Gambar 67. Pengaruh ketinggian dan jarak pemasangan aplikator
cair (Miller A dan Bellinder R, 2001)
Analisa penyemprotan bertumpuk dilakukan untuk mengetahui perbedaan distribusi larutan dengan penyemprotan tunggal dan distribusi larutan hasil penyemprotan dengan nozzle ganda pada beberapa nilai
overlaping. Dasar penentuan tingkat overlaping adalah dengan cara
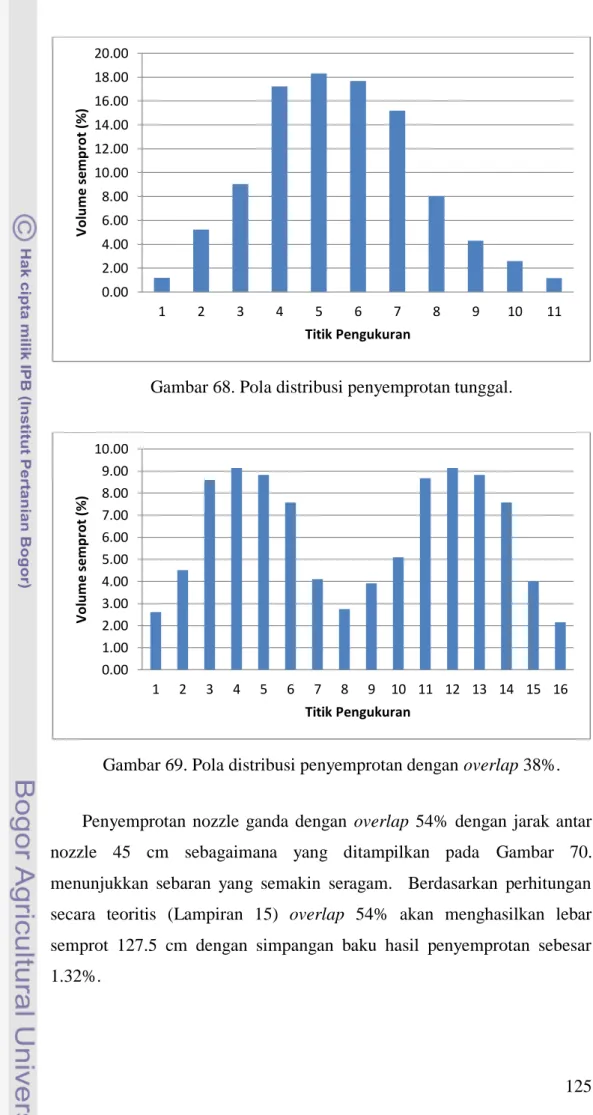
menghitung rasio jumlah titik pengamatan yang overlaping dengan jumlah keseluruhan titik pengamatan pada pengoperasian nozzle ganda. Penggunaan nozzle ganda dimaksudkan untuk mencapai lebar semprot sesuai rancangan (sama dengan lebar tangkapan citra), yaitu 136 cm dan nilai simpangan baku sekecil mungkin. Penyemprotan nozzle ganda dengan overlap 38% pada jarak antar nozzle 60 cm sebagaimana yang ditampilkan pada Gambar 69. menunjukkan sebaran yang masih cukup lebar. Berdasarkan perhitungan secara teoritis (Lampiran 14) overlap 38% akan menghasilkan lebar semprot 142.5 cm dengan simpangan baku hasil penyemprotan sebesar 2.66%.
125 Gambar 68. Pola distribusi penyemprotan tunggal.
Gambar 69. Pola distribusi penyemprotan dengan overlap 38%.
Penyemprotan nozzle ganda dengan overlap 54% dengan jarak antar nozzle 45 cm sebagaimana yang ditampilkan pada Gambar 70. menunjukkan sebaran yang semakin seragam. Berdasarkan perhitungan secara teoritis (Lampiran 15) overlap 54% akan menghasilkan lebar semprot 127.5 cm dengan simpangan baku hasil penyemprotan sebesar 1.32%. 0.00 2.00 4.00 6.00 8.00 10.00 12.00 14.00 16.00 18.00 20.00 1 2 3 4 5 6 7 8 9 10 11 V o lu m e sem p ro t (% ) Titik Pengukuran 0.00 1.00 2.00 3.00 4.00 5.00 6.00 7.00 8.00 9.00 10.00 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 V ol u m e sem p rot ( % ) Titik Pengukuran
126 Gambar 70. Pola distribusi penyemprotan dengan overlap 54%.
Hasil perhitungan teoritis penyemprotan dengan overlap 38% dan 54% memiliki lebar penyemprotan 142.5 cm dan 127.5 cm. Nilai lebar penyemprotan tersebut telah mendekati lebar penyemprotan yang direncanakan sebesar 136 cm.
Selain dengan cara meningkatkan nilai overlap, metode untuk meningkatkan keseragaman penyemprotan dapat dilakukan dengan mempergunakan nozzle yang memiliki sudut semprot yang besar. Penggunaan nozzle dengan sudut semprot yang besar akan memberikan hasil semprot yang lebih lebar dan lebih merata. Peningkatan keseragaman penyemprotan juga dapat dilakukan dengan menambah ketinggian penyemprotan. Pada ketinggian nozzle yang lebih besar keseragaman hasil penyemprotan akan lebih baik, karena droplet yang dihasilkan bercampur dengan lebih baik sebelum sampai pada obyek yang disemprot.
f. Analisa pengaruh kecepatan maju terhadap debit penyemprotan
Analisa pengaruh perubahan kecepatan maju penyemprot terhadap debit penyemprotan dilakukan dengan cara menghitung target dosis
penyemprotan per hektar dengan kecepatan maju yang ditargetkan 1 m/det. Tabel 21 menunjukkan hasil perhitungan dosis target
0 1 2 3 4 5 6 7 8 9 10 1 2 3 4 5 6 7 8 9 10 11 12 13 V ol u m e sem p rot ( % ) Titik Pengukuran
127 penyemprotan pada tiap-tiap kelas serangan gulma. Angka dosis tersebut selanjutnya dijadikan acuan untuk menghitung pengaruh perubahan maju penyemprot terhadap perubahan debit penyemprotan.
Tabel 21. Dosis penyemprotan tiap kelas serangan gulma
Kelas Debit semprot (l /menit)
Lebar kerja (cm)
Kecepatan
maju (m/det) Dosis (l /ha)
2 0.85 136 1 104.167
3 1.15 136 1 140.931
4 1.21 136 1 148.284
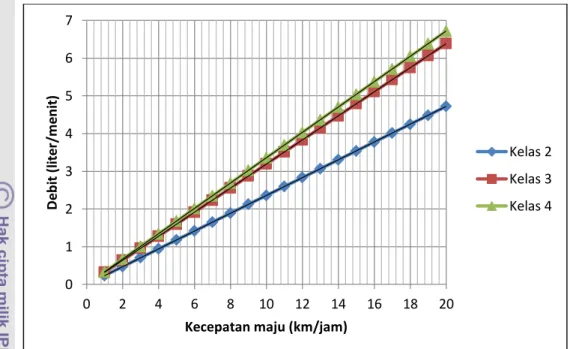
Tabel 21 menampilkan debit penyemprotan yang harus dioperasikan pada tiap-tiap kelas serangan gulma untuk mencapai dosis acuan yang telah ditentukan. Untuk mendapatkan persamaan yang merepresentasikan hubungan antara kecepatan maju dan debit penyemprotan data pada Tabel 22 diplotkan ke dalam grafik sebagaimana terlihat pada Gambar 71. Hasil analisa regresi linier diperoleh hubungan antara kecepatan maju dan debit penyemprotan untuk masing-masing kelas serangan gulma sebagai berikut :
Q2 (debit untuk kelas 2) = 0.236 x V ... ( 22 ) Q3 (debit untuk kelas 3) = 0.319 x V ... ( 23 ) Q4 (debit untuk kelas 4) = 0.336 x V ... ( 24 ) keterangan : V = kecepatan maju (km/jam)
Q = debit penyemprotan (l/menit)
Pengamatan terhadap kinerja aplikator cairan berbasis sensor terutama dari segi kecepatan kerja dapat dirinci mulai dari kegiatan pengambilan citra di lapangan, pengolahan citra dan klasifikasi citra, serta kecepatan aksi penyemprotan. Selain kecepatan kerja komponen lain yang perlu diperhatikan adalah luas kerja persatuan waktu. Berdasarkan desain awal aplikator cairan yang dibangun memiliki luas kerja per operasi sama dengan luas tangkapan citra, yaitu 102 cm x 136 cm.
128 Gambar 71. Hubungan kecepatan maju peralatan dan debit penyemprotan
Tabel 22. Dosis penyemprotan pada berbagai kecepatan maju peralatan Kecepatan (km/jam) Kelas 2 (liter/menit) Kelas 3 (liter/menit) Kelas 4 (liter/menit) 1 0.236 0.319 0.336 2 0.472 0.639 0.672 3 0.708 0.958 1.008 4 0.944 1.278 1.344 5 1.181 1.597 1.681 6 1.417 1.917 2.017 7 1.653 2.236 2.353 8 1.889 2.556 2.689 9 2.125 2.875 3.025 10 2.361 3.194 3.361 11 2.597 3.514 3.697 12 2.833 3.833 4.033 13 3.069 4.153 4.369 14 3.306 4.472 4.706 15 3.542 4.792 5.042 16 3.778 5.111 5.378 17 4.014 5.431 5.714 18 4.250 5.750 6.050 19 4.486 6.069 6.386 20 4.722 6.389 6.722 0 1 2 3 4 5 6 7 0 2 4 6 8 10 12 14 16 18 20 D e b it ( lit e r/ m e n it )
Kecepatan maju (km/jam)
Kelas 2 Kelas 3 Kelas 4
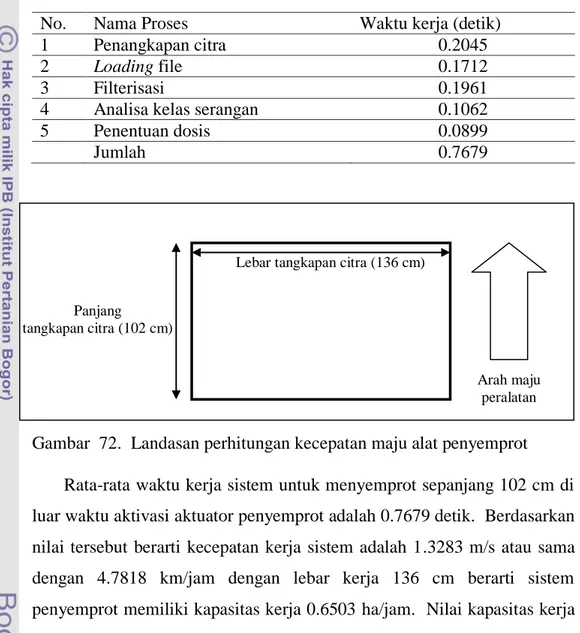
129 Rata-rata waktu kerja sistem berdasarkan 26 kali ulangan adalah sebagaimana ditampilkan pada Tabel 23. Hasil pengukuran secara lengkap dapat dilihat pada Lampiran 11.
Tabel 23. Waktu kerja rata-rata tiap proses pada sistem pengendalian gulma
No. Nama Proses Waktu kerja (detik)
1 Penangkapan citra 0.2045
2 Loading file 0.1712
3 Filterisasi 0.1961
4 Analisa kelas serangan 0.1062
5 Penentuan dosis 0.0899
Jumlah 0.7679
Gambar 72. Landasan perhitungan kecepatan maju alat penyemprot Rata-rata waktu kerja sistem untuk menyemprot sepanjang 102 cm di luar waktu aktivasi aktuator penyemprot adalah 0.7679 detik. Berdasarkan nilai tersebut berarti kecepatan kerja sistem adalah 1.3283 m/s atau sama dengan 4.7818 km/jam dengan lebar kerja 136 cm berarti sistem penyemprot memiliki kapasitas kerja 0.6503 ha/jam. Nilai kapasitas kerja yang diperoleh masih sangat kecil, sehingga diperlukan metode lain untuk meningkatkan kecepatan operasi dan kapasitas kerja.
Pengoperasian sistem tanpa melalui penyimpanan dan pengambilan file citra secara teoritis akan mempersingkat waktu operasi tiap proses, yaitu menjadi 0.426 detik. Kecepatan gerak maju maksimum menjadi 8.630 km/jam dan kapasitas kerja 1.172 ha/jam.
Lebar tangkapan citra (136 cm)
Panjang tangkapan citra (102 cm)
Arah maju peralatan
130 Kecepatan gerak maju yang semakin besar menuntut pemotretan yang lebih akurat baik dari segi ketepatan waktu pengambilan citra maupun kualitas citra yang dihasilkan. Untuk mendapatkan kualitas citra yang baik diperlukan teknologi kamera dengan kecepatan tinggi yang dilengkapi dengan fitur anti getar, didukung dengan desain dudukan kamera yang mampu meredam getaran yang terjadi selama proses pemotretan.
Simpulan
1. Aplikator cairan presisi berbasis PWM telah dibuat dengan masukan berupa nilai kombinasi serangan gulma hasil kerja sistem pendeteksi serangan gulma. 2. Ketepatan aktivasi penyemprotan pada lokasi yang telah ditentukan
menunjukkan nilai error rata-rata yang dihasilkan adalah sebesar 10.55% 3. Hasil uji kinerja ketepatan dosis dan respon aktuator pada berbagai nilai kelas
kepadatan serangan gulma menunjukkan nilai yang baik dengan rataan error yang terjadi sebesar 3.47%.
4. Penyemprotan dengan nozzle tunggal menghasilkan lebar semprot 82.5 cm dengan lebar semprot efektif 67.5 cm dengan simpangan baku 9.09%.
5. Rata-rata waktu kerja sistem untuk menyemprot sepanjang 102 cm diluar waktu aktivasi aktuator penyemprot adalah 0.76791 detik. Berdasarkan nilai tersebut berarti kecepatan kerja sistem adalah 1.3283 m/s, dengan lebar kerja 136 cm berarti sistem penyemprot memiliki kapasitas lapang teoritis 0.6503 ha/jam.
6. Pengoperasian sistem tanpa melalui penyimpanan dan pengambilan file citra akan mempersingkat waktu operasi tiap proses, yaitu menjadi 0.426 detik. Kecepatan gerak maju maksimum menjadi 8.630 km/jam dan kapasitas kerja 1.172 ha/jam.