IDENTIFIKASI PENGENALAN BENTUK BANGUN DATAR DUA DIMENSI
MENGGUNAKAN NEURAL NETWORK BACKPROPAGATION
Rusmono Yulianto – 2208205701
Jurusan Teknik Elektro-FTI, Institut Teknologi Sepuluh Nopember Kampus ITS, Keputih-Sukolilo, Surabaya - 60111 Abstrak : Identifikasi / pengenalan bentuk bangun
datar dua dimensi merupakan salah satu proses dasar dalam pembuatan animasi. Salah satu metode yang dapat digunakan untuk identifikasi adalah neural
network backpropagation. Proses identifikasi rancang
bangun tersebut memerlukan image processing agar dapat digunakan sebagai masukan neural network.
Software Delphi digunakan untuk membantu proses
pembelajaran, identifikasi, dan animasi hasil pengenalan bentuk bangun tersebut.
Hasil Pengujian parameter terbaik diperoleh saat momentum dan laju pelatihan sebesar 0,09 dan 0,9 dengan MSE : 1.66E-08. Sedangkan rata-rata hasil Identifikasi / pengenalan untuk setiap jenis obyek gambar bentuk 2D nilai akurasi yang dilatihkan adalah sama (±.83,33%).
Kata kunci : Neural Network, Algoritma Backpropagation, feed forward, multi-layer
I. PENDAHULUAN
Di dunia teknologi, media layar sentuh atau smartboard sebagai langkah kemajuan dibidang media pembelajaran. Layar sentuh atau Smartboard tersebut juga merupakan salah satu media strategi pembelajaran yang tujuan utamanya adalah untuk membangkitkan feeling dan mood pengguna atau atau yang melihat, karena merasa tertarik dan menyenangkan ketika berinteraksi dengan media pembelajaran yang canggih tersebut. Dengan adanya layar sentuh atau smarboard ini pula media yang bisa memberikan kepada pengguna memorable expeperience. Dalam perkembangannya layar sentuh atau smartboard ini juga berupa media menjadi sebuah kegiatan below the line yang terintegrasi dengan media yang lain.
Sedang dari layar sentuh atau smartboard yang dijadikan dalam penelitian ini adalah bagaimana layar sentuh atau smartboard tersebut bisa mengidentifikasi bentuk rancang bangun gambar obyek 2D bisa keluar output sesuai dengan target yang diinginkan.Adapun langkah yang pertama meliputi antara lain dari mengenal gambar bentuk primitif. Gambar bentuk primitif tersebut dibentuk dari titik, garis, kurva dan pola atau bentuk geometri dan berbagai bentuk bidang serta semua kombinasinya merupakan isi suatu keadaan yang disebut alam nyata. Alam nyata adalah istilah yang diambil untuk mewakili ruang tempat hidup semua makhluk hidup dan benda mati beserta semua keindahan yang terdapat di dalamnya, yang memberikan berbagai macam kombinasi gerak,
kombinasi warna atau kombinasi antara keduanya sehingga akan sangat rumit untuk menyatakan dan memvisualisasikan semua kombinasi tersebut dengan menggunakan komputer lain.
Langkah kedua, bagaimana mengembangkan suatu mesin pintar dapat memahami dan mengerti semua keadaan, bahkan juga dapat berkomunikasi dengan semuanya (teridentifikasi/pengenalan).
Oleh karena itu di dalam penelitian ini, peneliti dalam penelitian ini menggunakan metoda pelatihan terbimbing/terawasi (supervised learning), yang sering diaplikasikan para peneliti yaitu perseptron dan backpropagation (BP), yang didesain untuk operasi pada neural networks dalam hal pengenalan pola. Metode propagasi balik (Back Propagation). Neural networks merupakan sebuah mesin yang dirancang untuk memodelkan otak manusia mengerjakan fungsi atau tugas-tugas tertentu. Mesin ini memiliki kemampuan menyimpan pengetahuan berdasarkan pengalaman dan menjadikan yang dimiliki menjadi bermanfaat. Sedangkan secara prinsip, neural networks dapat melakukan komputasi terhadap semua fungsi yang dapat dihitung (computable function). Neural networks dapat melakukan apa yang dapat dilakukan oleh komputer digital normal.
Aplikasi metode komputasi Neural Networks sudah sedemikian populernya sehingga seolah-olah sedikit demi sedikit menggeser keberadaa ilmu statistik untuk menjadi “tool” dalam pengolahan data ilmiah. Sedang keberadaan komputasi cerdas sangat mendukung perkembangan bidang intelejensia buatan maupun sistem pakar yang semakin hari semakin luas pemakaiannya dan mampu menyelesaikan kebutuhan perhitungan yang rumit tanpa harus memberikan model matematikanya.
II. TEORIPENUNJANG 2.1 Jaring Saraf Tiruan
JST adalah sebuah sistem pemroses informasi dengan karakteristik tertentu yang dibuat menyerupai suatu jaring saraf biologis. Misalkan terdapat n buah masukan dan penimbang, fungsi keluaran dari tiap neuron adalah sebagai berikut:
F(x,w) = f(w1x1 + ... + wnxn) (1)
Proses belajar (learning) bagi JST merupakan proses mengatur nilai bobot penimbangnya untuk mendapatkan nilai yang terbaik dengan melatih JST
menggunakan sekumpulan data, menurut unjuk kerja sistem yang dikehendaki.
Gambar 1. Model tiruan neuron tanpa bias 2.2 Backpropagation Neural Network (BPNN)
Algoritma pelatihan BPNN terdiri dari dua proses utama, yaitu feed forward dan backpropagation dari error-nya. Secara garis besar, algoritma ini disebut sebagai backpropagation neural network (BPNN) karena ketika JST diberi pola masukan sebagai pola pelatihan, maka pola tersebut disebarkan maju (forward) menuju ke unit-unit pada hidden layer dan diteruskan pada output layer yang akan memberikan tanggapan yang disebut sebagai keluaran JST. Ketika keluaran JST tidak sama dengan keluaran yang diharapkan maka keluaran akan disebar mundur (backward) pada hidden layer dan diteruskan ke unit pada input layer.
2.3 Grayscaling
Grayscaling adalah proses perubahan nilai pixel dari warna (RGB) menjadi gray-level (Gonzalez, 2002). Pada dasarnya proses ini dilakukan dengan meratakan nilai pixel dari 3 nilai RGB menjadi 1 nilai. Untuk memperoleh hasil yang lebih baik, nilai pixel tidak langsung dibagi menjadi 3 melainkan terdapat persentasi dari masing-masing nilai. Salah satu persentasi yang sering digunakan adalah 29,9% dari warna merah (Red), 58,7% dari warna hijau (Green), dan 11,4% dari warna biru (Blue). Nilai pixel didapat dari jumlah persentasi 3 nilai tersebut. 2.4 Tresholding
Misal pada sebuah gambar, f(x,y) tersusun dari objek yang terang pada sebuah background yang gelap (Gonzalez, 2002). Gray-level milik objek dan milik background terkumpul menjadi 2 grup yang dominan. Salah satu cara untuk mengambil objek dari backgroundnya adalah dengan memilih sebuah nilai threshold T yang memisahkan grup yang satu dengan grup yang lain. Maka semua pixel yang memiliki nilai > T disebut titik objek, yang lain disebut titik background. Proses ini disebut thresholding. Nilai T dapat ditentukan dengan banyak cara, salah satunya adalah melalui perhitungan dimana nilai rata-rata jumlah pixel yang memiliki nilai di bawah T sana dengan nilai rata-rata jumlah pixel yang memiliki nilai di atas T . Untukperhitungan ini, nilai T yang didapat untuk gambar yang memiliki histogram yang telah ter-equalize adalah berkisar antara 127 dan 128. Nilai
maksimum dari T adalah nilai tertinggi dari sistem warna yang digunakan dan nilai minimum dari T adalah nilai terendah dari sistem warna yang digunakan. Untuk 256-graylevelmaka nilai tertinggi T adalah 255 dan nilai terendahnya adalah 0. Jika T hanya tergantung pada f(x,y) maka disebut thresholding global. Jika T tergantung dari f(x,y) dan p(x,y) (properti lokal milik titik tersebut, misalnya rata-rata gray-level pada "tetangga" dari (x,y)) maka disebut thresholding local. Jika T tergantung dari koordinat spatial x dan y maka disebut thresholding dynamic atau adaptive.
2.5 Segmentasi
Segmentasi gambar adalah pemisahan objek yang satu dengan objek yang lain dalam suatu gambar (Ballerini). Ada 2 macam segmentasi, yaitu full segmentation dan partial segmentation. Full segmentation adalah pemisahan suatu object secara individu dari background dan diberi ID (label) pada tiap-tiap segmen. Partial segmentation adalah pemisahan sejumlah data dari background dimana data yang disimpan hanya data yang dipisahkan saja untuk mempercepat proses selanjutnya.
III. METODOLOGI
Sistem identifikasi pada penelitian ini adalah neural network dengan backpropagation sebagai metode pelatihan untuk memperoleh bobot neural network sebagai aplikasi pengenalan rancang bangun gambar 2D. Gambar yang akan digunakan sebagai data pelatihan maupun data pengujian terlebih dahulu diolah menggunakan image processing sehingga dapat digunakan sebagai masukan neural network .
Data gambar berwarna diubah menjadi manjadi data gambar grayscale sehingga diperoleh dimensi data yang lebih kecil. Proses selnjutnya adalah proses thresholding yaitu proses mengubah gambar yang memiliki tingkat warna abu-abu menjadi gambar biner berdasarkan suatu nilai tertentu yang menjadi tolak ukurnya yaitu nilai antara 0 (hitam) 255 (putih).
Data gambar yang telah dibinerkan tersebut kemudian disegmentasi untuk mencari bentuk atau gambar bangun pada daerah Canvas. Daerah gambar bangun dua dimensi dicari dengan melakukan scanning pada sumbu x dan sumbu y, setelah didapatkan daerah gambar ROI pertama (Region Of Interest), maka didapatkan gambar dengan ukuran pixel P X L, dengan P = x2 - x1 dan L = y2 - y1
Neural network yang digunakan dalam penelitian ini hanya memiliki seratus neuron maka data gambar tersebut harus diubah menjadi 10x10 pixel dengan menggunakan proses ROI kedua.
Gambar 2. Diagram Blok Identifikasi Rancang Bangun Obyek 2D
Proses ROI 2 dapat dirumuskan sebagai berikut : If P>L then L = P
If P<L then P = L
x1’ = x1 - L / 2 y1’ = y1 – L / 2 x2’ = x2 – L / 2 y2’ = y2 – L/2
Normalisasi gambar dilakukan dengan membagi gambar menjadi 10 x 10 bagian. Misal untuk gambar 250 x 250 pixel, gambar akan dibagi menjadi 100 bagian sehingga Setiap bagian sekarang akan berukuran 25 x 25 pixel. Proses tersebut dapat dilihat pada gambar dibawah :
Gambar 3. Image Asli dan Perbesaran 1 Bagian
Untuk masuk sebagai input Neural Network, maka nilai Matrik harus berkisar antara 0 sampai dengan 1. Sehingga dari proses diatas di lakukan proses normalisasi nilai pixel dengan cara sebagai berikut :
Matrik[m,n] = Px / ( B x K ) dengan : B = baris
K = kolom
Px = jumlah pixel berwarna
Gambar 4. Gambar pixel yang telah dinormalisasi 3.1 Proses
Neural Networks merupakan proses utama dalam mendeteksi rancang bangun obyek 2D. Terdapat dua fase neural networks, yaitu fase pembelajaran dan fase penggunaaan. Pada fase pembelajaran dilakukan pembelajaran neural networks dari data pelatihan. Neural Networks tidak dapat digunakan tanpa danya fase pembelajaran ini. Setelah fase pembelajaran selesai, neural nerworks akan siap untuk digunakan pada fase penggunaan dengan menggunakan data pengujian. Dalam sistem identifikasi ini, neural networks akan digunakan untuk mengklasifikasi terhadap target sesuai dengan bobot input hidden sampai dengan bobot hidden output. Antar muka dari aplikasi yang dihasilkan dapat dilihat pada gambar 5.
Gambar 5. Tampilan antar muka software 3.1.1 Fase Pembelajaran
Neural Networks dilakukan secara supervised learning. Artinya, untuk neural networks digunakan data latihan yang telah dipersiapkan sebelumnya. Metode pelatihan yang kami gunakan adalah metode Backpropagation. Algoritma pelatihan Backpropagation akan mempengaruhi penimbang
Pengujian Gambar Grayscale Threshold segmentasi Normalisasi Neural Network Hasil Identifikasi Trainning
Proses Memperoleh bobot terbaik
dengan langkah-langkah sebagai berikut : Ketika neural networks diberikan pola tersebut maka pola tersebut menuju ke unit-unit pada lapis tersembunyi untuk diteruskan ke unit-unit lapis keluaran.Kemudian unit-unit pada lapis keluaran memberikan respon yang disebut keluaran neural networks. Saat keluarann Neural Networks tidak sama dengan keluaran yang diharpkan maka keluaran akan disebarkan ke lapis masukan. Adapun parameter-parameter yang menentukan keberhasilan proses pelatihan algoritma backpropagation :
Parameter laju pelatihan (ή)
Parameter laju pelatihan (learning rate) sangat berpengaruh pada intensitas proses pelatihan. Begitu pula terhadap evektivitas dan kecepatan mencapai konvergensi dari proses pelatihan. Nilai ή yang cukup kecil menjaminpenurunan gradien terlaksana dengan baik, namun ini berakibat bartambahnya jumlah iterasi. Pada umumnya besarnya nilai laju pelatihan tersebut dipilih mulai 0.001 sampai 1 selama proses pelatihan.
Momentum
Disamping koefisien laju pelatihan, pada metode ini ada koefisien lain yang tujuan penggunaannya untuk mempercepat konvergensi dari algoritma error backpropagation. Prinsip dari metode ini adalah menambahkan sebagian perubahan penimbang sebelumnya. Hal ini dirumuskan
∆w(t) = η▼E(T) + α∆ w(T-1)
Dengan nilai α adalah nilai konstanta momentum yang berupa bilangan positif antara 0,5 sampai 0,9
3.1.2 Fase Penggunaan
Pada fase pemakaian, pola yang akan dikenali dimasukkan pada unit input layer Neural Networks. Nilai penimbang diambil dari nilai penimbang terakhir pada fase pelatihan yang dianggap paling baik. Selanjutnya komputasi dilakukan pada pola dengan nilai penimbang Neural Networks hasil fase pelatihan, persamaan untuk komputasi tersebut sebagai berikut :
Z_inj = Voj +
X V
i ijKemudian fungsi pengaktif diterapkan untuk menghitung nilai keluaran layer tersembunyi
Zj =
( _
Z
in
j)
Nilai inilah yang akan diteruskan ke lapis keluaran, seperti proses pada lapis tersembunyi dan diperoleh hasil keluarannya adalah :
y_ink = Woj +
i jk
j
W
Z .
Hasil pengaktif unit-unit pada lapis keluaran merupakan keputusan dari Neural Networks.
3.2 Parameter JST
Untuk keperluan pembelajaran, parameter NN yang harus ditentukan adalah sebagai berikut :
1. Fungsi pembelajaran :
Gradient descent –backpropagation 2. Jumlah layer
Input layer : 100 neuron Hidden layer : 200 neuron Output layer : 6 neuron 3. Fungsi aktivasi
Hidden layer : fungsi sigmoid biner Output layer : fungsi sigmoid biner 4. Iterasi maksimal : 100.000
5. Error maksimal : 0,001 6. Learning rate : 0,1 7. Momentum : 0,2 3.3 Identifikasi
Output atau keluaran JST merupakan identifikasi rancang bangun obyek 2D. Identifikasi yang dihasilkan dapat menentukan jenis benda yang digambar oleh penguji melalui analisis nilai keluaran setiap neuron pada lapis keluaran. Identifikasi rancang bangun obyek 2D dapat dilihat pada Tabel 1.
Tabel 1. Identifikasi rancang bangun obyek 2D Keadaan motor Keluaran JST
Bujur sangkar [1 0 0 0 0 0] Persegi Panjang [0 1 0 0 0 0] Lingkaran [0 0 1 0 0 0] Segitiga [0 0 0 1 0 0] Jajar Genjang [0 0 0 0 1 0] Trapesium [0 0 0 0 0 1] IV. HASILDANANALISIS
Pengujian pada sistem ini dilakukan untuk mengukur kinerja sistem yang telah dirancang dan diimplementasikan. Pada penelitian ini, sistem akan diuji coba dengan dua kategori pengujian yaitu pengujian momentum dan laju pelatihan dan pengujian identifikasi pengenal rancang bangun obyek 2 D.
Tujuan pengujian adalah untuk mendapatkan parameter neural networks yang tepat untuk mendeteksi identifikasi rancang bangun obyek 2D yang terjadi gambar primitive dan untuk mengetahui apakah neural networks yang diajukan dapat digunakan untuk hal tersebut.
Hasil Pengujian Momentum dan Laju Pelatihan yang terbaik dilaju 0,09, momentum 0,9 dengan MSE : 1.66E-08. Tabel pengujian momentum terhadap error dapat dilihat pada tabel 2.
Tabel 2 Pengujian Momentum Terhadap Error
Setelah hasil MSE (Mean Square Error) diketahui, maka grafik performance error sistem terhadap epoch sebagai berikut :
4.1 Data arus motor
Dari pengukuran terhadap motor induksi satu fasa yang dilakukan di laboratorium diperoleh bentuk gelombang arus stator seperti yang ditunjukkan Gambar 7, 8, dan 9.
Gambar 6. Grafik Error pelatihan terhadap epochs 4.1 Pengujian Identifikasi pengenal rancang
bangun obyek 2 D
Setelah dilakukan pengujian terhadap enam jenis rancang bangun 2D yang terdiri dari 60 gambar diperoleh hasil sebagai berikut:
Bentuk bangun Bujur sangkar dengan pengujian 10 gambar, maka tingkat keberhasilannya 8 gambar yang dikenali, dan 2 gambar tidak dikenali
Bentuk bangun Persegi Panjang dengan pengujian 10 gambar, maka tingkat keberhasilannya 8 gambar yang dikenali , dan 2 gambar tidak dikenali.
Bentuk bangun Lingkaran dengan pengujian 10 gambar, maka tingkat keberhasilannya terkenali semua.
Bentuk bangun segitiga dengan pengujian 10 gambar, maka tingkat keberhasilannya 9 gambar yang dikenali, dan 1 gambar tidak dikenali.
Bentuk bangun Jajaran genjang dengan pengujian 10 gambar, maka tingkat
Dari pengujian dan evaluasi dari tabel diatas maka dari 60 gambar yang tidak teridentifikasi ada 10 gambar atau dikatakan berhasil, karena mencapai tingkat pengenalan akurasi 83,33%.
4.2 Kesalahan Identifikasi / Pengenalan
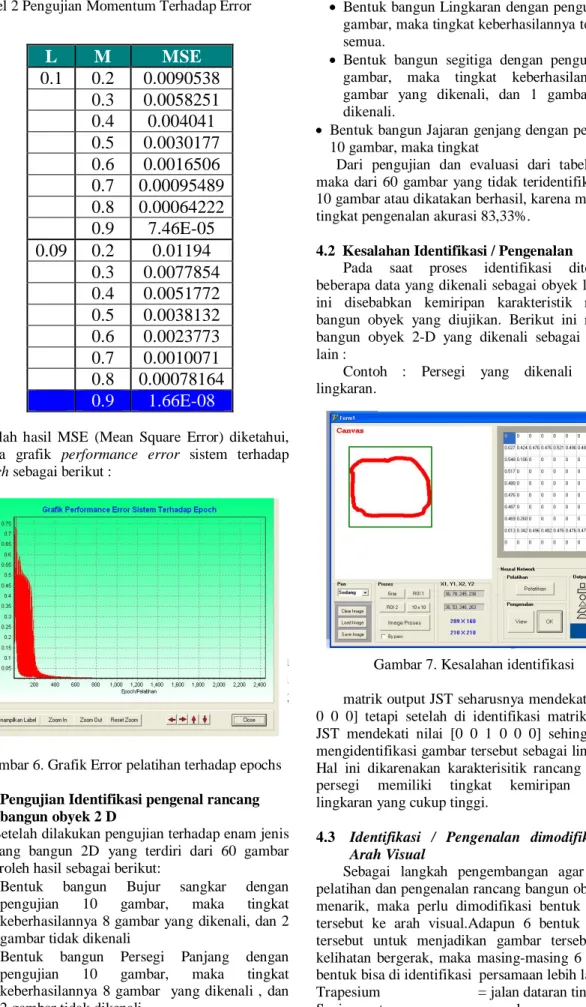
Pada saat proses identifikasi ditemukan beberapa data yang dikenali sebagai obyek lain, hal ini disebabkan kemiripan karakteristik rancang bangun obyek yang diujikan. Berikut ini rancang bangun obyek 2-D yang dikenali sebagai bangun lain :
Contoh : Persegi yang dikenali sebagai lingkaran.
4.2 Feature Extraction
Dari hasil dekomposisi arus hingga level tiga diperoleh fitur-fitur sinyal frekuensi tinggi seperti ditunjukkan pada Tabel 2,3,4, dan 5.
4.3 Pembelajaran JST
Pembelajaran JST dilakukan dengan empat pola fitur arus motor yang terdiri dari fitur arus domain waktu dan fitur arus domain frekuensi. Fitur
Gambar 7. Kesalahan identifikasi
matrik output JST seharusnya mendekati [1 0 0 0 0 0] tetapi setelah di identifikasi matrik output JST mendekati nilai [0 0 1 0 0 0] sehingga JST mengidentifikasi gambar tersebut sebagai lingkaran. Hal ini dikarenakan karakterisitik rancang bangun persegi memiliki tingkat kemiripan dengan lingkaran yang cukup tinggi.
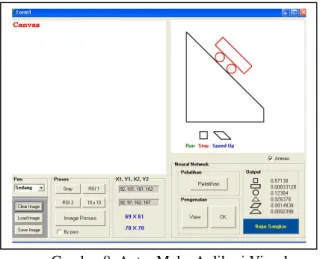
4.3 Identifikasi / Pengenalan dimodifikasi ke Arah Visual
Sebagai langkah pengembangan agar proses pelatihan dan pengenalan rancang bangun obyek 2D menarik, maka perlu dimodifikasi bentuk bangun tersebut ke arah visual.Adapun 6 bentuk bangun tersebut untuk menjadikan gambar tersebut bisa kelihatan bergerak, maka masing-masing 6 gambar bentuk bisa di identifikasi persamaan lebih lanjut : Trapesium = jalan dataran tinggi
Segi empat = gerobag
Lingkaran = roda
L
M
MSE
0.1
0.2
0.0090538
0.3
0.0058251
0.4
0.004041
0.5
0.0030177
0.6
0.0016506
0.7
0.00095489
0.8
0.00064222
0.9
7.46E-05
0.09
0.2
0.01194
0.3
0.0077854
0.4
0.0051772
0.5
0.0038132
0.6
0.0023773
0.7
0.0010071
0.8
0.00078164
0.9
1.66E-08
Bujur sangkar = stop / menghentikan Jajaran genjang = untuk mengatur
kecepatan (cepat/lambat) Segitiga = start /mulai
Gambar 8. Antar Muka Aplikasi Visual membuat garis trapesium(dataran tinggi),
setelah itu dilanjutkan lingkaran(roda) dan segi empat (gerobak)
Menentukan tanda untuk memulai / start, dengan membuat gambar segitiga,maka gerobak tersebut akan turun dengan sendirinya dengan cepat.
V. KESIMPULAN
Berdasarkan analisis yang telah dilakukan dapat diambil kesimpulan sebagai berikut:
1. Penggunaaan learning rate terlalu besar dan nilai momentum terlalu kecil akan menyebabkan tingkat konvergensi sangat lambat. Learning rate kecil dan nilai momentum besar akan mempercepat tingkat konvergensi dan diharapkan mendapatkan hasil lebih.baik.
2. Hasil Pengujian parameter terbaik diperoleh saat momentum dan laju pelatihan sebesar 0,09 dan 0,9 dengan MSE : 1.66E-08.
3. Bobot yang dihasilkan pada proses pembelajaran menggunakan enam jenis obyek gambar bentuk 2D telah memberikan hasil pengenalan yang cukup baik dengan rata-rata hasil identifikasi / pengenalan untuk setiap jenis obyek gambar bentuk 2D yang dilatihkan adalah sebesar 83,33%.
4. Pada saat membuat gambar rancang bangun benar-benar melihat kemiripan karakteristik gambarnya, jika terjadi ketidaksempurnaan maka proses identifikasi / pengenalan ditemukan beberapa data yang dikenali sebagai obyek lain, hal ini disebabkan kemiripan karakteristik rancang bangun obyek yang diujikan.
PENGEMBANGAN
1. Proses segmentasi obyek gambar bentuk 2D dapat disempurnakan dengan menggunakan beberapa metode pemrosesan citra yang lain. 2. Jumlah sampel untuk setiap obyek gambar
bentuk 2D dapat ditambah untuk menghasilkan bobot yang lebih stabil untuk masing-masing obyek gambar bentuk.
3. Pemilihan model untuk setiap obyek gambar bentuk 2D dapat lebih bervariasi sehingga kemungkinan model obyek gambar bentuk yang tidak sejenis dengan obyek gambar bentuk yang dilatihkan dapat semakin besar.
4. Proses pengenalan obyek gambar bentuk 2D tidak hanya dapat dilakukan dengan menggunakan neural networks namun dapat pula dengan beberapa metode lain, misalnya, menggunakan database yang berisi obyek gambar bentuk 2D yang akan dikenali.
UCAPAN TERIMAKASIH
Penulis mengucapkan terimakasih kepada bapak bapak Hariadi selaku dosen pembimbing yang telah membantu penyelesaian tugas akhir ini.
DAFTARPUSTAKA
[1] Mauridhi Hery P. dan Agus Kurniawan, “Supervised Neural Networks dan Aplikasinya”, Graha Ilmu, Yogyakarta, 2006.
[2] Dicky N. Wardana, Dimas Anton A., dan Mauridhi Hery P.,”Early Detection for Short Circuit Symptom at Single Phase Induction Motor Winding Using Neural Networks”,
Proceedings of National Seminar on Applied Technology, Science, and Arts, pp. 35, Surabaya, Desember 2009.
[3] B. Kusumo Putro, E. philipus, dan Rahmat Widyanto, “pengenalan huruf tulisan tangan menggunakan logika fuzzy dan jaringan syaraf tiruan”, Seminar on air- PPI
tokyo institute of technology No. 1 hal. 34-38, Juli 2000.
[4] Gonzales, Rafael; Wintz, Paul; Digital Image Processing Second Edition, Addison-Wesley Publishing Company, 1987
[5] Rosa Ariani Sukamto,“Feature extraction pengenalan tulisan tangan dengan ciri-ciri geometrik (offline