A. Pengantar Fisika dalam Sepeda
Saat kita berada di atas sepeda atau sepeda motor dalam keadaan diam, kita sulit menjaga keseimbangan. Akan tetapi, ketika sepeda atau sepeda motor itu mulai berjalan, keseimbangan
sangat mudah terjadi.
Persoalan diatas bias dijawab dengan pendekatan gaya yaitu melibatkan gaya sentrifugal dan gravitasi. Ketika sepeda (motor) diam, maka tidak ada gaya sentrifugal yang bekerja padanya karena kecepatannya nol, saat diam inilah gaya gravitasi membuatnya jatuh. Berbeda waktu sepeda (motor) sedang berjalan. Gaya sentrifugal ini mampu mengimbangi berat badan kita sehingga kita tidak jatuh (seimbang). Gaya sentrifugal sangat terasa ketika kita membelok. Saat membelok ke kiri, kita akan merasakan gaya sentrifugal ke kanan (tubuh kita terasa terlempar ke kanan). Demikian juga ketika sepeda (motor) membelok ke kanan, kita akan terlempar ke kiri. Besarnya gaya sentrifugal ini tergantung pada kecepatan. Semakin cepat sepeda (motor) bergerak, semakin besar gaya sentrifugal yang kita rasakan. Ketika sepeda motor bergerak lambat, gaya sentrifugal kecil. Gaya ini tidak mampu mengatasi gaya berat kita, akibatnya kita mudah jatuh.
Disisi lain sering terpintas di pikiran, kenapa sepeda yang beroda dua itu ketika diam, tidak bisa berdiri dengan tegak, namun, ketika dikendarai dengan kecepatan yang cukup, sepeda kita menjadi seimbang. Jangan - jangan ada hantu yang menyeimbangkan sepeda kita? Kemungkinan pertanyaan di atas bias dijawab dengan dua alasan, yang pertama adalah efek giroskop. efek giroskop adalah efek benda yang berputar sehingga mempertahankan kedudukannya. Misalkan saja gasing yang diputar, ketika gasing hampir jatuh, gasing tersebut akan mencoba berdiri lagi sampai gasing tidak mampu berputar lagi. sama halnya dengan gasing, ketika roda sepeda kita berputar, roda tersebut akan berusaha mempertahankan kedudukannya, sehingga ketika kita melaju dengan sepeda kita, sepeda akan bergerak seimbang.
terasa terlempar ke kanan). Demikian juga ketika sepeda (motor) membelok ke kanan, kita akan terlempar ke kiri. Besarnya gaya sentrifugal ini tergantung pada kecepatan. Semakin cepat sepeda (motor) bergerak, semakin besar gaya sentrifugal yang kita rasakan. Ketika sepeda motor bergerak lambat, gaya sentrifugal kecil. Gaya ini tidak mampu mengatasi gaya berat kita, akibatnya kita mudah jatuh.
Selain dari dua factor yang membuat sepeda seimbang di atas, ada yang berpengarh dalam hal keseimbanagn yaitu gaya eksternal (reaksi) yang berasal aria permukaan jalan.Jadi dari uraian di atas dapat di tarik kesimpulan bahwa, saat kita berada di atas sepeda atau sepeda motor dalam keadaan diam, kita sulit menjaga keseimbangan. Akan tetapi, ketika sepeda atau sepeda motor itu mulai berjalan, keseimbangan sangat mudah terjadi, hal ini di sebabkan oleh :
1. Gaya gravitasi akibat massa sepeda dan pengendara, 2. gaya sentrifugal ketika roda berputar,
3. Efek giroskopik ketika sepeda bergerak dan dikendarai (seperti yang terjadi pada gasing), 4. Efek aerodinamis akibat angin.
5. Kombinasi beberapa efek yang bergantung pada geometri (bentuk), distribusi (sebaran) massa, dan laju sepeda. Pada sepeda motor, ban, suspensi, kemudi redaman, dan bingkai fleksibel juga dapat mempengaruhi keseimbangan. Hal ini berlaku pada atraksi sepeda diam tapi tetap seimbanag, mengapa jatuh? Sebetulnya, ketika sepeda tidak bergerak maju, pengendara masih dapat menyeimbangkan sepeda dengan prinsip yang sama. Sambil melakukan trek berdiri, pengendara dapat menjaga keseimbangan dengan cara menggerakkan roda depan ke satu sisi atau yang lain sehingga pusat massa gabungan antara pengendara dan sepeda berubah-ubah (lihat gambar di bawah). Namun hal tersebut biasanya tidak bertahan lama.
B. Stabilitas Bersepeda
Berdasarkan parameter geometris yang ditampilkan, rumus matematika untuk jejak adalah:
sudut kiri dan kanan kerangka sepeda dengan bidang vertikal sedangkan sudut kemudi adalah sudut roda depan dengan bidang sepeda (yang terkandung dalam kerangka sepeda). Gambar di bawah ini menggambarkan sudut sandar dan kemudi.
di mana θ adalah sudut sandar dan α adalah sudut kemudi. Tanda konvensi untuk sudut ini dan sehubungan dengan pengendara duduk di sepeda biasanya sebagai berikut: bersandar kanan adalah θ positif dan kiri adalah θ negatif. Kemudi kanan adalah α positif dan kemudi kiri adalah α negatif. Untuk analisis stabilitas baik dari sudut ini hanya variabel independen diperlukan untuk matematis menganalisis stabilitas sepeda. Mereka benar-benar menggambarkan orientasi sepeda karena perjalanan ke arah depan. Untuk sepeda stabil sudut sandar dan kemudi harus memiliki kecenderungan untuk “mati” (“die out”), yang berarti bahwa sudut-sudut ini akan berfluktuasi di sekitar nol dengan nilai-nilai positif dan negatif keci. Hal ini pada gilirannya berarti bahwa sepeda cenderung tetap tegak dengan sedikit balik, sambil bergerak ke arah depan. Sangat menarik bahwa mengunci kemudi depan akan selalu menghasilkan sepeda terjatuh. Stabilitas mensyaratkan bahwa roda depan bisa leluasa mengarahkan .
Seperti disebutkan, menganalisis stabilitas sepeda adalah suatu usaha yang kompleks yang melibatkan sejumlah besar persamaan dan “berantakan” (“messy”). Ada banyak interaksi fisik yang terjadi antara berbagai komponen sepeda (yaitu depan dan roda belakang, kolom kemudi, dan kerangka sepeda) untuk memungkinkan penjelasan lengkap secara intuitif. Untuk memperoleh pemahaman yang cukup terhadap stabilitas sepeda yang terbaik adalah melakukan analisis dinamika secara lengkap dan kemudian mendasarkan pemahaman pada hasil analisis ini.
dan akibatnya sering diasumsikan bahwa sepeda tanpa penunggang stabil juga akan stabil dengan hadiah pengendara . Ini bisa menjadi asumsi yang masuk akal tapi sayangnya mengabaikan “masukan” dari pengendara yang juga mempengaruhi seberapa stabil sepeda adalah selama penggunaannya .
C. Giroskopik Terhadap Stabilitas
Sebuah keyakinan yang umum bahwa efek giroskopik yang membuat sepeda stabil. Ini sebenarnya tidak terjadi. Meskipun efek giroskopik yang memainkan peran tetapi hanyalah bagian dari interaksi dinamis yang jauh lebih besar terjadi antara berbagai komponen sepeda, yang akhirnya membuat stabil sepeda selama dikendarai. Desain sepeda, dan konfigurasi dari komponen yang berbeda, telah dioptimalkan selama berabad-abad (terutama melalui trial and error), untuk membuatnya stabil mungkin .
Seperti disebutkan, efek giroskopik tidak menjadi kontribusi utama terhadap stabilitas sepeda tetapi efek ini tetap memberikan informasi untuk melihat bagaimana efek giroskopik berkontribusi terhadap stabilitas. Untuk memahami kontribusi ini pertimbangkan skenario berikut :
Katakanlah sepeda tanpa penunggang bergerak pada kecepatan tertentu. Katakanlah bahwa sepeda bersandar tepat (θ positif ). Hal ini menyebabkan roda depan untuk mengarahkan kanan (α positif ) karena efek giroskopik. Untuk membantu memahami mengapa hal ini terjadi, pikirkan apa yang diperlukan untuk mencegah roda depan dari kemudi kanan. Hal ini harus menerapkan torsi di sebelah kiri (berlawanan) arah , di setang/di kemudi, untuk mencegah roda depan dari kemudi kanan. Oleh karena itu, dengan tanpa torsi (pada sepeda tanpa penunggang) roda depan secara alami mengarahkan tepat ke kanan. Cobalah dengan sepeda itu sendiri. Angkat sepeda dari tanah dan dengan cepat memutar roda depan ke arah depan. Kemudian, sedikit memiringkan kerangka sepeda kiri atau kanan, dan perhatikanlah apa yang terjadi pada roda depan. Bandingkan ini dengan apa yang terjadi ketika roda depan tidak diputar ketika memiringkan sepeda.
Rantai peristiwa yang sama terjadi jika sepeda awalnya bersandar kiri (θ negatif ). Rantai peristiwa ini yang menjaga agar sepeda tidak terjatuh.
Seluruh interaksi fisik yang terjadi sebenarnya lebih kompleks daripada skenario yang diberikan di atas, terutama karena osilasi dalam θ dan α. Tapi skenario yang disederhanakan diberikan di atas berfungsi untuk menyoroti kontribusi bahwa efek giroskopik membuat agar kestabilan sepeda terjaga.
D. Bersandar ke Sebuah Belokan
Ketika mengendarai sepeda perlu untuk bersandar ke belokan untuk mengimbangi efek dari percepatan sentripetal. Bersandar ke dalam menyeimbangkan percepatan sentripetal yang membuat agar tak terjatuh. Untuk menganalisis sepeda di belokan pertimbangkan skema berikut.
dimana: θ adalah sudut kemiringan; R adalah radius belokan diukur dari pusat massa sistem pengendara sepeda G; ac adalah percepatan sentripetal dari pusat massa sistem pengendara sepeda G; m adalah massa dari sistem pengendara sepeda; g adalah percepatan gravitasi di bumi, yaitu 9,8 m/s2; L adalah jarak dari titik G ke titik kontak efektif P antara sepeda dan tanah; N adalah gaya normal antara sepeda dan tanah; F
adalah gaya gesekan antara sepeda dan tanah ke arah ac. Karena tidak ada percepatan dalam arah vertikal jumlah dari gaya-gaya vertikal adalah nol. Dengan demikian,
dimana v adalah kecepatan sepeda di sekitar belokan. Jumlahkan momen terhadap titik G:
(Perhatikan bahwa kita mengabaikan efek tiga dimensi dalam persamaan ini) . Gabungkan tiga persamaan di atas untuk menemukan persamaan untuk sudut sandar θ . Didapatkan,
E. Gaya dan Daya
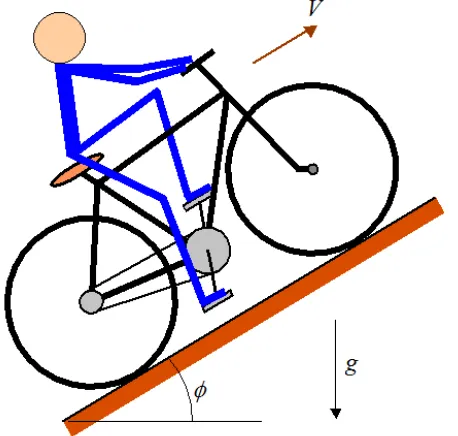
Gambar di bawah menunjukkan sepeda akan menanjak dengan sudut kemiringan Φ , dan dengan kecepatan V.
Untuk mendorong sepeda menanjak pengendara harus menekan di pedal. Pedal disajikan 180° yang berarti bahwa hanya satu pedal dapat didorong pada satu waktu dari posisi teratas ke posisi bawah, dan kemudian beralih ke pedal lainnya .
Mengingat gaya F1 menekan pedal kita dapat menghitung gaya F4 dihasilkan antara roda belakang dan tanah. Ini adalah gaya yang mendorong sepeda ke depan. Kita bisa melakukan analisis torsi dengan akurasi yang baik didasarkan pada asumsi bahwa percepatan (linear dan angular) diabaikan. Oleh karena itu, kita dapat memperlakukan ini sebagai masalah statis.
dimana: F1 adalah gaya yang diterapkan ke pedal; R1 adalah jari-jari pedal; F2 adalah gaya yang bekerja pada engkol utama, karena kontak rantai; R2 adalah jari-jari engkol utama; F3 adalah gaya yang bekerja pada gigi belakang, karena kontak rantai; R3 adalah jari-jari gigi belakang; F4 adalah gaya yang bekerja pada roda belakang, karena kontak dengan tanah. Perhatikan bahwa koefisien gesekan statik antara roda dan tanah harus cukup besar untuk mendukung gaya ini, jika tidak maka akan tergelincir; R4 adalah jari-jari roda belakang
Menggunakan asumsi keseimbangan statis dapat ditulis persamaan torsi berikut:
dan
Jika F2 = F3, kita bisa menggabungkan dua persamaan di atas untuk memberikan ekspresi F4:
dimana: F adalah gaya pendorong sepeda ke depan. Perhatikan bahwa F ≡ F4; Cr adalah koefisien hambatan gelinding, untuk ban sepeda di dapat ,0022-0,005 ( ref: http://en.wikipedia.org/wiki/Rolling_resistance ); Cd adalah koefisien hambatan; ρ adalah densitas udara yang dilalui sepeda bergerak; A adalah luas penampang yang diproyeksikan dari sepeda + pengendara tegak lurus terhadap arah aliran (yaitu, tegak lurus terhadap v ) , dan v adalah kecepatan sepeda relatif terhadap udara.
Istilah pertama di sisi kanan dari persamaan di atas adalah kontribusi gravitasi. Istilah kedua adalah kontribusi hambatan gelinding. Istilah ketiga adalah kontribusi hambatan udara.
Untuk menghitung daya P yang diperlukan untuk mendorong sepeda, kalikan persamaan di atas dengan v Kita mendapatkan P = Fv, dan
Untuk permukaan datar (tidak miring ) mengatur Φ = 0. Didapatkan:
dan
Tentu saja, ketika naik sepeda kita ingin menjaga gaya hambatan melawan gerakan serendah mungkin. Hal ini dilakukan dengan menjaga ban bertekanan baik (yang meminimalkan hambatan gelinding) dan menjaga daerah garis depan A sekecil mungkin untuk mengurangi hambatan udara, terutama ketika bepergian dengan kecepatan tinggi, seperti berlomba. Biasanya , perlawanan bergulir jauh lebih tinggi dari hambatan udara sehingga mengurangi A tidak penting bagi rata-rata pengendara yang bepergian pada kecepatan sedang.
F. Refrensi
1. http://edukasi.kompasiana.com/2014/01/15/fisika-sederhana-sepeda-624679.html
2. www.yohanessurya.com/activities.php?pid=20204&id=182
3. riyobarcelonista.wordpress.com/.../aplikasi-gaya-sentrifugal-dalam-olahr.
4. http://kigendengfisikawan.blogspot.com/2013/02/naik-sepeda-diam-jatuh-bergerak-seimbang.html