PERANCANGAN KONTROL FUZZY
UNTUK PENGATURAN KESEIMBANGAN DAYA AKTIF
PADA SISTEM
PEMBANGKIT LISTRIK MINI HIDRO
Utari Yusman, Mohammad Rameli
Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS)
Jl. Arief Rahman Hakim, Surabaya 60111
E-mail:[email protected] ,[email protected]
Abstrak— Dalam sistem pembangkitan listrik tenaga air, terdapat beberapa komponen utama seperti turbin air, generator, dan rangkaian elektronika daya. Untuk skala kecil biasanya digunakan generator magnet permanen yang memiliki karakteristik yang lebih efisien, kerapatan energi yang tinggi, dan relatif mudah untuk dikontrol. Potensi air di Indonesia sangat menjanjikan, dan penelitian pembangkitan energi disini terfokus untuk usaha merancang suatu kontroler yang mampu menjaga frekuensi sistem selalu berada pada 50 Hz (dengan toleransi 10% ke bawah dan 5% ke atas.)Ada hal yang menjadi suatu tantangan untuk diselesaikan, yaitu memodelkan dinamika umum generator sinkron magnet permanent yang memperlihatkan pada keadaan sebenarnya, memodelkan turbin air yang digunakan dalam perancangan ini, yaitu turbin air jenis pelton. Pada tugas akhir ini digunakan metoda kontrol Fuzzy. Kontroler ini digunakan untuk memberikan sinyal kontrol yang mampu mengatur kecepatan rotor untuk berada pada keadaan optimal dalam usaha mendapatkan keseimbangan daya sesuai kriteria frekuensi yang telah ditentukan.
Kata Kunci— PLTM, Generator Sinkron, Daya Aktif, Frekuensi, Fuzzy
I. PENDAHULUAN
etergantungan manusia modern terhadap penggunaan energi listrik menuntut untuk diberlakukannya suatu sumber energi terbarukan, mengingat sumber energi listrik yang biasa digunakan berupa bahan bakar fosil sudah semakin berkurang jumlahnya.Pembangkit Listrik Tenaga Mini Hidro (PLTM) merupakan suatu objek yang menarik mengingat banyaknya sumber-sumber perairan di Indonesia, seperti sungai dan air terjun. Potensi ini sangat sayang apabila tidak dimanfaatkan, terutama untuk menyokong kebutuhan listrik di daerah terpencil yang belum dimasuki listrik Perusahaan Listrik Negara (PLN). Ironinya, sumber tenaga air skala mini ini banyak terdapat di daerah seperti ini.
Apabila terjadi perubahan beban signifikan secara tiba-tiba, akan terjadi masa transisi untuk menyeimbangkan daya output pembangkit (dalam hal ini generator) dengan daya beban yang digunakan oleh penduduk [1]. Pada sistem yang sudah ada, proses transisi ini banyak yang menggunakan resistansi komplementer, yaitu dengan memasang beban
berupa heater untuk menyesuaikan beban penduduk agar selalu berada pada beban maksimal untuk memudahkan pengontrolan [2]. Metoda ini tidak efisien bila dilihat dari pembuangan kelebihan energi yang dibelokkan ke beban komplementer. Hal ini tentu saja menjadi tantangan tersendiri untuk merancang suatu sistem pengaturan baru yang lebih efisien. Pengaturan yang ditawarkan menggunakan kontroler Fuzzy sebagai logika pengambil keputusan dalam mengatur variabel kontrol (governor dan eksitasi) pada generator sinkron.
Pada makalah ini, dijelaskan desain sebuah kontrol Fuzzy untuk menghasilkan sinyal kontrol pada setiap daerah kerja yang berbeda. Dengan kontrol Fuzzy, perubahan daerah kerja akan diikuti oleh perubahan titik kerja kontrol, sehingga bisa memberikan respon yang lebih cepat dalam pencapaian referensi.
II. TEORIDASAR A. Pemodelan Turbin Air
Taksiran potensi air diperlukan untuk melihat tinggi energi yang ada dilokasi, untuk selanjutnya dipertimbangkan jenis turbin atau kapasitas generator yang akan digunakan. Untuk suatu aliran yang mempunyai tinggi energi sebesar H (m), dan debit sebesar Q (m3/s), maka potensi daya pada aliran tersebut secara umum dapat dinyatakan sebagai:
P = ρ g Q H (m kg/s) (1) dengan ρ adalah massa jenis air, sebesar 1000 kg/m3, dan g adalah percepatan gravitasi, sebesar 9.8 m/s2.
Daya yang dihasilkan oleh turbin dapat dihasilkan dari daya yang tersedia pada air dikalikan dengan efisiensi turbin (η0), yaitu:
P = ρ g Q H η0 (m kg/s) (2) Tenaga yang dikeluarkan dipengaruhi oleh Q maupun H. Efisiensi daya turbin dipengaruhi oleh tipe turbin. Dengan turbin yang memiliki efisiensi tertinggi yaitu turbin tipe Pelton dengan efisiensi mencapai 90%.
B. Pemodelan Generator Sinkron
Pemodelan generator sinkron diperlukan untuk membuat simulasi generator sinkron berdasarkan dinamika elektrik maupun mekanik yang terjadi pada generator nyata.
Setiap mesin dapat dikontrol oleh 2 sinyal kontrol (input):
1. Arus medan/arus rotor (ir) 2. Torsi mekanik (Tm)
Bila salah satu atau kedua input berubah, maka akan mempengaruhi 4 output:
1. Pgv 2. Qgv 3. |Vv| 4. F
Rangkaian persamaan generator sinkron:
Gambar 1. Skematik Rangkaian Ekivalen Mesin Sinkron
Persamaan umum mesin sinkron didapatkan menggunakan hukum Kirchoff, yaitu:
��=−��.�� −�
ia, ib, dan ic : arus yang melewati kumparan stator fasa a, b, dan c
vr: tegangan eksitasi ir: arus mengalir pada rotor rr: resistansi kumparan rotor
Persamaan umum mesin sinkron pada (3) dapat diselesaikan secara analitik menggunakan teknik Transformasi Blondel. Metoda ini menggunakan komponen baru yang disebut direct axis (d), quadrature axis (q), dan zero sequence (0). Pada teori mesin listrik, dilihat dari stator sebagai kordinat referensi dan memiliki origin pada axis kumparan a, maka mmf yang dihasilkan arus a arahnya proporsional dengan ia.
Bila sistem kordinat dengan rotor sebagai kordinat referensi dan memiliki origin pada titik tengah kutub mesin, gelombang mmf yang sama akan timbul dengan intensitas proportional dengan ia cos α. Dari sudut pandang ini, arus id pada titik tengah kutub disebabkan mmf total karena tiga arus
stator. Sedangkan iq menghasilkan emf pada arah tegak lurus kutub.
Transformasi kordinat referensi berdasarkan rotor ini dapat dilihat pada gambar 2:
Gambar 2 Definisi Transformasi Blondel
Dengan matriks Blondel (B), yaitu:
� ≜ 2
Berdasarkan persamaan mesin sinkron pada (3), dapat dituliskan persamaan kordinat referensi rotornya yaitu:
��=−��.�� − �����
vd: tegangan direct axis vq: tegangan quadrature axis v0:tegangan zero sequence id: arus direct axis iq: arus quadrature axis i0: arus zero sequence
Akan dirancang suatu simulasi generator sinkron dengan beban resistif dan induktif yang disimbolkan dengan RL dan LL. Dinamika generator berbeban ini dapat dijabarkan dalam persamaan (8), seperti:
���=��.��+�����
�� − ����� ���=��.��+�����
�� +�����
(6) Dengan VLd, VLq, RL, LL, iLd, dan iLq berturut-turut merupakan tegangan beban pada d, tegangan beban pada q, resistansi beban, induktansi beban, arus beban pada d, serta arus beban pada q.
ke dalam persamaan (6) untuk mendapatkan dinamika arus pada generator. Persamaan hasil subsitusi yaitu:
(��+��)��� �� − �5
���
�� = (���+���)�� −(��+��)�� (��+��)���
�� =��5�� − (���+���)�� −(��+��)�� �4���
�� + 3 2 �5
���
�� =�� − ��.��
(7) Dinamika mekanik dari generator dapat dituliskan dalam bentuk persamaan:
2��̇=−��+ (�� − ��) (8) Dengan H, D, Pm, dan Pe adalah konstanta waktu inersia, konstanta damper, daya mekanik turbin, serta daya elektrik generator.
C. Kontrol Logika Fuzzy
Sebagai kontroler, logika Fuzzy memiliki bentuk seperti pada gambar 3:
Gambar 3 Blok Diagram Logika Fuzzy
Secara umum dalam sistem logika fuzzy terdapat empat buah elemen dasar, yaitu:
1. Basis kaidah (rule base), yang berisi aturan-aturan secara linguistik yang bersumber dari para pakar; 2. Suatu mekanisme pengambilan keputusan (inference
engine), yang memperagakan bagaimana para pakar mengambil suatu keputusan dengan menerapkan pengetahuan (knowledge);
3. Proses fuzzifikasi (fuzzification), yang mengubah besaran tegas (crisp) ke besaran fuzzy.
4. Proses defuzzifikasi (defuzzification), yang mengubah besaran fuzzy hasil dari inference engine, menjadi besaran tegas (crisp).
Himpunan pada semesta pembicaraan X yang mengakomodasi derajat keanggotaan, diperkenalkan Zadeh sebagai “Himpunan Fuzzy”. Dari suatu himpunan fuzzy, terdapat himpunan pendukung fuzzy berupa istilah bahasa seperti “cepat”, “sedang”, “lambat”, “sangat cepat”, dan “sangat lambat”.
Himpunan klasik dapat diekspresikan dalam bentuk: A = {x | x > 6}
Himpunan fuzzy pada semesta X, dinotasikan dengan x, maka, himpunan fuzzy A pada X didefinisikan sebagai:
A = {x, μA(x) | x X} ;μA(x) disebut fungsi keanggotaan x pada A.
Pada fuzzy, fungsi keanggotaan yaitu berupa kurva yang mendefinisikan bagaimana memetakan setiap titik pada ruang input kepada derajat keanggotaan antara 0 dan 1. Fungsi keanggotaan dapat didistribusikan dalam beberapa bentuk
diagram, seperti distribusi linier, distribusi segitiga, trapesium, dan gausian. Ada beberapa fungsi yang bisa digunakan :
1. Representasi segitiga
Gambar 4 Distribusi Segitiga Fungsi Keanggotaan Fuzzy
µ[x] = 0 ; x ≤ a atau c ≤ x
µ[x] = (x-a)/(b-a) ; a ≤ x ≤ b
µ[x] = (c-x)/(c-b) ; b ≤ x ≤ c
µ[x] = 1 ; x ≤ a (9) 2. Representasi trapesium
Gambar 5 Distribusi Trapesium Fungsi Keanggotaan Fuzzy
µ[x] = 0 ; x ≤ a atau d ≤ x
µ[x] = (x-a)/(b-a) ; a < x ≤ b
µ[x] = (d-x)/(d-c) ; c ≤ x ≤ d
µ[x] = 1 ; b ≤ x ≤ c (10)
3. Representasi gaussian
Gambar 6 Distribusi Gaussian Fungsi Keanggotaan Fuzzy
Persamaan:
�(�) =��� �−1 2�
��− �� �� �
2 �
(11) Fungsi keanggotaan ini merupakan suatu fungsi (kurva) yang menunjukkan pemetaan titik-titik input data ke dalam nilai keanggotaannya (derajat keanggotaan) yang memiliki interval antara 0 sampai 1. Proses pemetaan ini merupakan sutu proses fuzzyfikasi yang selanjutnya dilakukan proses pengambilan keputusan (inference fuzzy) untuk menentukan hasil dari fuzzyfikasi.
Aturan if-then menginterpretasikan perbedaan yang jelas antara antecedent (meliputi fuzifikasi input dan memberikan operator fuzzy yang diperlukan) dengan consequent (berupa kesimpulan).
Bentuk umum aturan:
If premise Then consequent
Yang sering digunakan yaitu dalam bentuk basis aturan. Penggunaannya seperti:
Inferensi fuzzy [10] adalah proses perumusan memetakan dari input yang diberikan menjadi keluaran menggunakan logika fuzzy. Pemetaan mendukung aturan dari keputusan yang akan diambil. Proses inferensi fuzzy meliputi
pendeskripsian dungsi keanggotaan fuzzy, operasi logika, serta aturan jika-maka. Dapat dijabarkan seperti:
1. Kombinasi input dengan aturan premis (fuzzifikasi input)
Contoh: Pada semesta X dengan range [1-10], terdapat himpunan fuzzy 1, 2, dan 3. Menggunakan distribusi segitiga, fuzzifikasi himpunan A dapat dituliskan
X = {X1 ;X 2; X3}
A = {µ1/X1 ; µ2/X2 ; µ3/X3}= [µ1 µ2 µ3]T 2. Menentukan aturan yang diaktifkan (menerapkan
operator fuzzy) 3. Agregasi aturan fuzzy.
Inference fuzzy bisa dilakukan dengan beberapa metoda seperti mamdani, takagi sugeno, ataupun larsent. Mendefinisikan inference rule dapata dilakukan dengan cara seperti:
1. Mamdani
µ(k) = max [µ(k), min{µ1(j), µ2(i)}] 2. Larsent
µ(k) = max [µ(k), {µ1(j), µ2(i)}] Atau
µ(k) = 0.5 [µ(k) + µ1(j) . µ2(i)]
Suatu hal yang harus dihitung yaitu bagaimana menerapkan hasil logika fuzzy pada plant. Diperlukan proses defuzzifikasi [9] logika fuzzy menjadi besaran skalar.Terdapat beberapa metoda defuzzifikasi, yaitu:
1. Max Membership Principle
Metoda ini membatasi pada fungsi output puncak. Dituliskan dalam persamaan aljabar:
µc(z*) ≥µc(z) ; untuk semua z∈ Z
z* digambarkan sebagai:
Gambar 7 Defuzzifikasi Max Membership
2. Centroid (disebut juga Centre of Area/Centre of Gravity)
Metode ini yang paling mumpuni untuk defuzzifikasi [Sugeno,1985; Lee,1990]. Diberikan dalam persamaan aljabar:
� ∗ = ∫ ��(�).���
∫ ��(�)��
3. Weighted Average Method
Merupakan metode yang paling sering digunakan dalam aplikasi fuzzy, karena merupakan metoda dengan efisiensi perhitungan. Diberikan dalam persamaan aljabar:
� ∗ = ∑ ��(��).�̅
∑ ��(�̅)
Bentuk perhitungan metode ini seperti:
� ∗ = �(0.5)+�(0.9)
0.5+0.9 Gambar 8 Defuzzifikasi Weighted Average dan perhitungannya
III. DESAIN KONTROL LOGIKA FUZZY PADA PENGATURAN
KESEIMBANGAN DAYA AKTIF PLTM
Sebelum melakukan perancangan kontroler, harus diketahui terlebih dahulu kriteria desain yang diinginkan. Pada pembangkit listrik, perubahan beban akan menyebabkan keseimbangan daya pada sistem terganggu. Keseimbangan daya tersebut terlihat dari kestabilan frekuensi sistem. Kriteria sistem yang diinginkan adalah:
1. Rating daya aktif: 500 kW 2. Rating tegangan: 380 V 3. Rating arus: 130 A 4. Rating frekuensi: 50 Hz 5. Kecepatan rotor: 750 rpm 6. Daya nominal: 357 kW 7. Daya minimal: 127 kW 8. Daya maksimal: 396 kW
Berdasarkan respon hasil percobaan, dapat disimpulkan:
a. Sinyal kontrol governor naik: frekuensi naik, tegangan naik
b. Sinyl kontrol governor turun: frekuensi turun, tegangan turun
c. Sinyal kontrol eksitasi naik: frekuensi turun, tegangan naik
d. Sinyal kontrol eksitasi turun: frekuensi naik, tegangan turun
Untuk mengatur agar daya dan frekuensi selalu seimbang dan tegangan selalu konstan, digunakan fungsi keanggotaan fuzzy berupa:
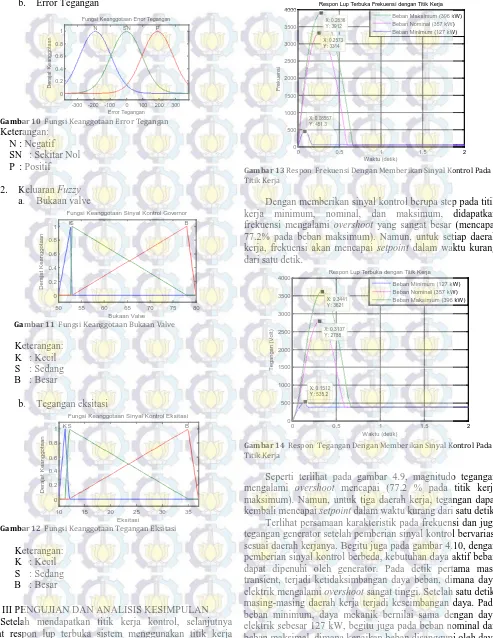
1. Masukan Fuzzy a. Error Frekuensi
Gambar 9 Fungsi Keanggotaan Error Frekuensi
Keterangan: N : Negatif SN : Sekitar Nol P : Positif
-20 -10 0 10 20
0 0.2 0.4 0.6 0.8 1
Error Frekuensi
D
er
aj
at
K
eanggot
aan
N SN P
b. Error Tegangan
Gambar 10 Fungsi Keanggotaan Error Tegangan Keterangan:
N : Negatif SN : Sekitar Nol P : Positif 2. Keluaran Fuzzy
a. Bukaan valve
Gambar 11 Fungsi Keanggotaan Bukaan Valve
Keterangan: K : Kecil S : Sedang B : Besar
b. Tegangan eksitasi
Gambar 12 Fungsi Keanggotaan Tegangan Eksitasi
Keterangan: K : Kecil S : Sedang B : Besar
III PENGUJIAN DAN ANALISIS KESIMPULAN Setelah mendapatkan titik kerja kontrol, selanjutnya dilihat respon lup terbuka sistem menggunakan titik kerja tersebut. Respon dapat dilihat pada gambar 13 sampai dengan gambar 15.
Gambar 13 Respon Frekuensi Dengan Memberikan Sinyal Kontrol Pada Titik Kerja
Dengan memberikan sinyal kontrol berupa step pada titik kerja minimum, nominal, dan maksimum, didapatkan frekuensi mengalami overshoot yang sangat besar (mencapai 77.2% pada beban maksimum). Namun, untuk setiap daerah kerja, frekuensi akan mencapai setpoint dalam waktu kurang dari satu detik.
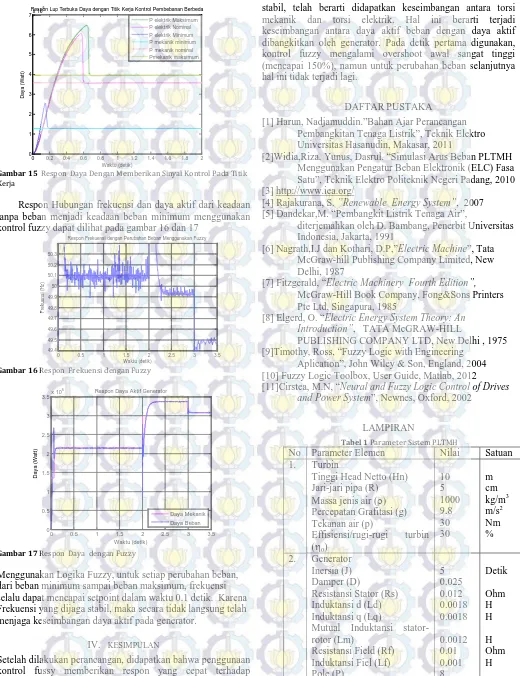
Gambar 14 Respon Tegangan Dengan Memberikan Sinyal Kontrol Pada Titik Kerja
Seperti terlihat pada gambar 4.9, magnitudo tegangan mengalami overshoot mencapai (77.2 % pada titik kerja maksimum). Namun, untuk tiga daerah kerja, tegangan dapat kembali mencapai setpoint dalam waktu kurang dari satu detik. Terlihat persamaan karakteristik pada frekuensi dan juga tegangan generator setelah pemberian sinyal kontrol bervariasi sesuai daerah kerjanya. Begitu juga pada gambar 4.10, dengan pemberian sinyal kontrol berbeda, kebutuhan daya aktif beban dapat dipenuhi oleh generator. Pada detik pertama masa transient, terjadi ketidaksimbangan daya beban, dimana daya elektrik mengalami overshoot sangat tinggi. Setelah satu detik, masing-masing daerah kerja terjadi keseimbangan daya. Pada beban minimum, daya mekanik bernilai sama dengan daya elektrik sebesar 127 kW, begitu juga pada beban nominal dan beban maksimal, dimana kenaikan beban disanggupi oleh daya yang dihasilkan oeh generator.
-300 -200 -100 0 100 200 300
Fungsi Keanggotaan Error Tegangan
50 55 60 65 70 75 80
Fungsi Keanggotaan Sinyal Kontrol Governor
10 15 20 25 30 35
Fungsi Keanggotaan Sinyal Kontrol Eksitasi
0 0.5 1 1.5 2
Respon Lup Terbuka Frekuensi dengan Titik Kerja
X: 0.2573 Y: 3314
X: 0.2836 Y: 3912
Beban Maksimum (396 kW) Beban Nominal (357 kW) Beban Minimum (127 kW)
0 0.5 1 1.5 2
Respon Lup Terbuka dengan Titik Kerja
X: 0.3137 Y: 2788
X: 0.1512 Y: 535.2
Gambar 15 Respon Daya Dengan Memberikan Sinyal Kontrol Pada Titik Kerja
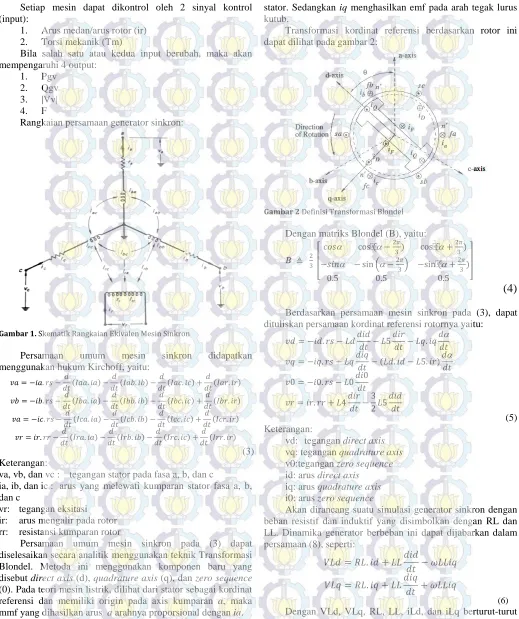
Respon Hubungan frekuensi dan daya aktif dari keadaan tanpa beban menjadi keadaan beban minimum menggunakan kontrol fuzzy dapat dilihat pada gambar 16 dan 17
Gambar 16 Respon Frekuensi dengan Fuzzy
Gambar 17 Respon Daya dengan Fuzzy
Menggunakan Logika Fuzzy, untuk setiap perubahan beban, dari beban minimum sampai beban maksimum, frekuensi selalu dapat mencapai setpoint dalam waktu 0.1 detik. Karena Frekuensi yang dijaga stabil, maka secara tidak langsung telah menjaga keseimbangan daya aktif pada generator.
IV. KESIMPULAN
Setelah dilakukan perancangan, didapatkan bahwa penggunaan kontrol fussy memberikan respon yang cepat terhadap perbahan beban generator. Dengan menjaga frekuensi selalu
stabil, telah berarti didapatkan keseimbangan antara torsi mekanik dan torsi elektrik. Hal ini berarti terjadi keseimbangan antara daya aktif beban dengan daya aktif dibangkitkan oleh generator. Pada detik pertama digunakan, kontrol fuzzy mengalami overshoot awal sangat tinggi (mencapai 150%), namun untuk perubahan beban selanjutnya hal ini tidak terjadi lagi.
DAFTARPUSTAKA
[1] Harun, Nadjamuddin.”Bahan Ajar Perancangan Pembangkitan Tenaga Listrik”, Teknik Elektro Universitas Hasanudin, Makasar, 2011
[2]Widia,Riza. Yunus, Dasrul. “Simulasi Arus Beban PLTMH Menggunakan Pengatur Beban Elektronik (ELC) Fasa Satu”, Teknik Elektro Politeknik Negeri Padang, 2010 [3
[4] Rajakurana, S. ”Renewable Energy System”, 2007 [5] Dandekar,M. “Pembangkit Listrik Tenaga Air”,
diterjemahkan oleh D. Bambang, Penerbit Universitas Indonesia, Jakarta, 1991
[6] Nagrath,I.J dan Kothari, D.P,”Electric Machine”, Tata McGraw-hill Publishing Company Limited, New Delhi, 1987
[7] Fitzgerald, “Electric Machinery Fourth Edition”, McGraw-Hill Book Company, Fong&Sons Printers Pte Ltd, Singapura, 1985
[8] Elgerd, O. “Electric Energy System Theory: An Introduction”, TATA McGRAW-HILL
PUBLISHING COMPANY LTD, New Delhi , 1975 [9]Timothy, Ross, “Fuzzy Logic with Engineering
Aplication”, John Wiley & Son, England, 2004 [10] Fuzzy Logic Toolbox, User Guide, Matlab, 2012 [11]Cirstea, M.N, “Neural and Fuzzy Logic Control of Drives
and Power System”, Newnes, Oxford, 2002
LAMPIRAN
Tabel 1 Parameter Sistem PLTMH
No Parameter Elemen Nilai Satuan 1. Turbin
Tinggi Head Netto (Hn) Jari-jari pipa (R) Massa jenis air (ρ) Percepatan Grafitasi (g) Tekanan air (p)
Resistansi Stator (Rs) Induktansi d (Ld) Induktansi q (Lq)
Mutual Induktansi stator-rotor (Lm)
Resistansi Field (Rf) Induktansi Fiel (Lf) Pole (P)
Respon Lup Terbuka Daya dengan Titik Kerja Kontrol Pembebanan Berbeda P elektrik Maksimum
Respon Frekuensi dengan Perubahan Beban Menggunakan Fuzzy
0 0.5 1 1.5 2 2.5 3 3.5
Respon Daya Aktif Generator
RIWAYATPENULIS
Penulis bernama lengkap utari yusman, dan biasa dipanggil ‘tari’. Penulis lahir di kota padang, 1 juni 1990.
Riwayat Pendidikan:
1. SD Baiturrahmah Padang (1995-2001)
2. SMP N 1 Payakumbuh (2001-2004)
3. SMA N 2 Payakumbuh (2004-2007)
4. Teknik Elektronika Politeknik Negeri Padang (2007-2010)
5. Teknik Sistem Pengaturan ITS (2011-2013) 6. Penulis aktif sebagai anggota Bahasa,
UKM-Robotika, dan UKM-Pers Politeknik Negeri Padang selama periode 2008-2010
![Gambar 4 Distribusi Segitiga Fungsi Keanggotaan Fuzzy µ[x] = 0 ; x ≤ a atau c ≤ x](https://thumb-ap.123doks.com/thumbv2/123dok/2283599.1629421/3.612.48.578.53.731/gambar-distribusi-segitiga-fungsi-keanggotaan-fuzzy-u-atau.webp)