M O D U L E L E K T R O N I K A D A N M E K A T R O N I K A
M O T O R S E R V O
O L E H E L M E K I S A T R I A
MODUL PEMBELAJARAN MOTOR SERVO
Untuk Sekolah Menengah Kejuruan
Edisi Tahun 2017
KEMENTERIAN PENDIDIKAN DAN KEBUDAYAAN DIREKTORAT JENDERAL PENDIDIKAN DASAR DAN MENENGAH
MODUL PEMBELAJARAN MOTOR SERVO
Copyright © 2017, Direktorat Pembinaan SMK
All rights Reserved
Pengarah
Direktur Pembinaan SMK
Penanggung Jawab
Arie Wibowo Khurniawan, S.Si. M.Ak
Kasubdit Program dan Evaluasi, Direktorat Pembinaan SMK
Ketua Tim
Arfah Laidiah Razik, S.H., M.A.
Kasi Evaluasi, Subdit Program dan Evaluasi, Direktorat Pembinaan SMK
Penyusun
Elmeki Satria, S.Pd (SMKN 1 Bukittinggi)
Desain dan Tata Letak Rayi Citha Dwisendy, S.Ds
ISBN
Penerbit:
Direktorat Pembinaan Sekolah Menengah Kejuruan
Komplek Kementerian Pendidikan dan Kebudayaan, Gedung E, Lantai 13 Jalan Jenderal Sudirman, Senayan, Jakarta 10270
ISBN 978-602-5517-03-7
978-602-5517-03-7
MODUL PEMBEL
KATA PENGANTAR KASUBDIT PROGRAM DAN EVALUASI
Assalamu’alaikum Warahmatullahi Wabarakatuh
Salam Sejahtera,
Melalui Instruksi Presiden (Inpres) Nomor 9 Tahun 2016 tentang Revitalisasi Sekolah Menengah Kejuruan (SMK), dunia pendidikan khususnya SMK sangat terbantu karena akan terciptanya sinergi antar instansi dan lembaga terkait sesuai dengan tugas dan fungsi masing-masing dalam usaha mengangkat kualitas SMK. Kehadiran Buku Serial Revitalisasi SMK ini diharapkan dapat memudahkan penyebaran informasi bagaimana tentang Revitalisasi SMK yang baik dan benar kepada seluruh stakeholder sehingga bisa menghasilkan lulusan yang terampil, kreatif, inovatif, tangguh, dan sigap menghadapi tuntutan dunia global yang semakin pesat.
Buku Serial Revitalisasi SMK ini juga diharapkan dapat memberikan pelajaran yang berharga bagi para penyelenggara pendidikan Kejuruan, khususnya di Sekolah Menengah Kejuruan untuk mengembangkan pendidikan kejuruan yang semakin relevan dengan kebutuhan masyarakat yang senantiasa berubah dan berkembang sesuai tuntuan dunia usaha dan industri.
Tidak dapat dipungkuri bahwa pendidikan kejuruan memiliki peran strategis dalam menghasilkan manusia Indonesia yang terampil dan berkeahlian dalam bidang-bidang yang sesuai dengan kebutuhan. Terima kasih dan penghargaan kami sampaikan kepada semua pihak yang terus memberikan kontribusi dan dedikasinya untuk meningkatkan kualitas Sekolah Menengah Kejuruan. Buku ini diharapkan dapat menjadi media informasi terkait upaya peningkatan kualitas lulusan dan mutu Sumber Daya Manusia (SDM) di SMK yang harus dilakukan secara sistematis dan terukur.
Wassalamu`alaikum Warahmatullahi Wabarakatuh
Jakarta, 2017
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
Bersyukur kepada Tuhan yang Maha Esa penyusun panjatkan dan ucapan terima kasih
kepada rekan, pihak festo dan kemdikbud atas tersusunnya modul ini, dengan harapan dapat
digunakan sebagai modul untuk siswa Sekolah Menengah Kejuruan (SMK) Bidang Studi
Keahlian Teknologi Dan Rekayasa, Teknik Mechatronik. Penerapan kurikulum 2013 mengacu
pada paradigma belajar kurikulum abad 21 menyebabkan terjadinya perubahan, yakni dari
pengajaran (teaching) menjadi belajar (learning), dari pembelajaran yang berpusat kepada
guru (teacherscentered) menjadi pembelajaran yang berpusat kepada peserta didik
(studentcentered), dari pembelajaran pasif (pasive learning) ke cara belajar peserta didik aktif
(active learning-CBSA) atau Student Active Learning-SAL. Penyajian modul untuk Mata
Pelajaran Sistim Kontrol ini disusun dengan tujuan agar supaya peserta didik dapat
melakukan proses pencarian pengetahuan berkenaan dengan materi pelajaran melalui
berbagai aktivitas proses sains sebagaimana dilakukan oleh para ilmuwan dalam melakukan
eksperimen ilmiah (penerapan scientifik), dengan demikian peserta didik diarahkan untuk
menemukan sendiri berbagai fakta, membangun konsep, dan paradigma baru secara mandiri.
Stuttgart, 01 April 2017
Penyusun
MODUL PEMBEL
PETA KEDUDUKAN MODUL ... viii
GLOSARIUM ...ix
E. Petunjuk Penggunaan Modul ... 10
F. Peta kompetensi ... 2
H. Tujuan Akhir... 2
I. Cek Penguasaa Kompetensi Dasar ... 3
BAB II PEMBELAJARAN ... 13
A. RENCANA BELAJAR SISWA ... 13
B. KEGIATAN BELAJAR ... 13
a. Kegiatan Pembelajaran ke 1 Jenis-jenis Motor ... 13
I. Tujuan pembelajaran... 13
II. Uraian Materi ... 13
III. Rangkuman ... 28
IV. Tugas ... 28
V. Tes Formatif ... 28
VI. Kunci Jawaban Formatif ... 28
VII. Lembar Kerja ... 29
b. Kegiatan Pembelajaran ke 2 Motor Stepper ... 29
I. Tujuan pembelajaran... 29
II. Uraian Materi ... 29
III. Rangkuman ... 35
IV. Tugas ... 35
V. Tes Formatif ... 35
MODUL PEMBEL
c. Kegiatan Pembelajaran ke 3 Motor seri, Induksi, dan Motor listrik ... 37
I. Tujuan Pembelajaran ... 37
II. Uraian Materi ... 37
III. Rangkuman ... 52
IV. Tugas ... 52
V. Tes Formatif ... 52
VI. Kunci Jawaban Formatif ... 53
VII. Lembar Kerja ... 53
d. Kegiatan Pembelajaran ke 4 Menghitung daya motor listrik ... 54
I. Tujuan pembelajaran... 54
II. Uraian Materi ... 54
III. Rangkuman ... 61
IV. Tugas ... 61
V. Tes Formatif ... 61
VI. Kunci Jawaban Formatif ... 62
VII. Lembar Kerja ... 62
e. Kegiatan Pembelajaran ke 5 Aplikasi Motor servo dengan Mikrokontroler ... 63
I. Tujuan pembelajaran... 63
II. Uraian Materi ... 63
III. Rangkuman ... 85
IV. Tugas ... 86
V. Tes Formatif ... 86
VI. Kunci Jawaban Formatif ... 86
VIII. Lembar Kerja ... 88
BAB III EVALUASI……….…….81
A. Penilaian Pengetahuan……….…..81
B. Penilaian Keterampilan……….82
DAFTAR PUSTAKA ... 94
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
.
.
.
.
. Motor stepper : perangkat elektromekanis yang bekerja dengan
mengubah pulsa elektronis menjadi gerakan mekanis
diskrit
Motor servo : sebuah motor DC dengan sistem umpan balik tertutup
di mana posisi rotor-nya akan diinformasikan kembali
ke rangkaian kontrol yang ada di dalam motor servo
H-bridge : 4 (empat) buah saklar yang disusun membentuk huruf
“H”
flyback diode : komponen tambahan untuk mencegah terjadinya
“lompatan” tegangan yang dapat mengakibatkan
switch terbakar
Encoder : perangkat yang mengubah putaran menjadi
sekumpulan sinyal digital yang berurutan
Pulse width modulation : teknik menghasilkan nilai analog secara digital selain
“LOW” dan “HIGH”
Motor listrik : suatu perangkat elektromagnetik yang digunakan
untuk mengkonversi atau mengubah energi listrik
menjadi energi mekanik
Rangkaian star delta : rangkaian instalasi motor dengan sambungan bintang
segitiga (Y∆), atau lebih dikenal dengan nama koneksi
star delta
MODUL PEMBEL
3.1 Memahami gambar symbol, terminologi dan prinsip dasar serta fungsi dari sistem
kontrol.
4.1 Memahami jenis disain, kerja, sifat, karakteristik, dan media dari sistem kontrol,
serta sistem software teknik kontrol.
.
modul pembelajaran “Motor Servo” diharapkan dapat membantu peserta didik dalam
menguasai sistim control pada suatu PLC yang nantinya akan mengacu pada sistim
robotic. Sehingga peserta didik dapt mengathui mengenai mekanisme pengontrolan
dari suatu sistim elektronik.
.
Waktu yang diperuntukkan untuk menguasai modul ini adalah sebanyak 66 jam
pertemuan.
.
Sebelum mempelajari modul ini siswa diharuskan sudah menguasi pelajaran yang
berhubungan dengan CAE, teknik pemprograman dan teknik pengendalian daya.
.
Untuk memperoleh hasil belajar secara maksimal, dalam menggunakan modul ini maka
langkah-langkah yang perlu dilaksanakan antara lain :
1. Bacalah dan pahami dengan seksama uraian-uraian materi yang ada pada
masing-masing kegiatan belajar. Bila ada materi yang kurang jelas, peserta diklat
dapat bertanya pada instruktur pengampu kegiatan belajar.
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
. 2. Kerjakan setiap tugas formatif (soal latihan) untuk mengetahui seberapa besar
pemahaman yang telah dimiliki terhadap materi-materi yang dibahas dalam setiap
kegiatan belajar.
3. Untuk kegiatan belajar yang terdiri dari teori dan praktik, perhatikanlah hal-hal
berikut:
A. Perhatikan petunjuk-petunjuk keselamatan kerja yang berlaku.
B. Pahami setiap langkah kerja (prosedur praktikum) dengan baik.
C. Sebelum melaksanakan praktikum, identifikasi (tentukan) peralatan dan
bahan yang diperlukan dengan cermat.
D. Gunakan alat sesuai prosedur pemakaian yang benar.
E. Untuk melakukan kegiatan praktikum yang belum jelas, harus meminta ijin
guru atau instruktur terlebih dahulu.
F. Setelah selesai, kembalikan alat dan bahan ke tempat semula
G. Jika belum menguasai level materi yang diharapkan, ulangi lagi pada kegiatan
belajar sebelumnya atau bertanyalah kepada instruktur yang mengampu
kegiatan pembelajaran yang bersangkutan.
.
.
.
Setelah menyelesaikan pembelajaran modul motor servo ini peserta didik dapat:
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
.
Sebelum melanjutkan kepada kegiatan pembelajaran dalam modul motor servo ini,
cobalah untuk menjawab pertanyaan berikut ini
1. Sebutkan bagian-bagian komponen sistem hidrolik?
2. Jelaskan fungsi dan sifat tangki hifrolik?
3. Apa yang dimaksud dengan pompa jenis positive displascemen?
4. Jelaskan dan berikan contoh jenis pompanya?
5. Apa fungsi dari pressure relief valve? Gambarkan simbolnya.
6. Apa fungsi dari throttle check valve? Gambarkan simbolnya.
7. Sebut faktor-faktor yang mempengaruhi pemilihan pipa hidrolik?
8. Apakah yang dimaksud dengan motor DC?
.
.
MODUL PEMBELAJARAN MOTOR SERVO
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
.
Kegiatan Pembelajaran 1 : Jenis Motor 6 JP
Kegiatan Pembelajaran 2 : Motor Seri 6 JP
Kegiatan Pembelajaran 3 : Motor Stepper 12 JP
Kegiatan Pembelajaran 4 : Daya Motor Listrik 18 JP
Kegiatan Pembelajaran 5 : Aplikasi Motor Servo 24
.
. .
1. Peserta didik dapat mengetahui jenis-jenis motor DC
2. Peserta didik dapat menjelaskan tentang Brushed DC Motor .
. –
Motor DC merupakan jenis motor yang paling sering digunakan di dalam dunia
robotika. Salah satu alasannya adalah arah putaran motor DC, baik searah jarum
jam maupun berlawanan arah jarum jam, dapat dengan mudah dikendalikan. Motor
DC terdiri dari beberapa jenis. 3 (tiga) di antaranya adalah: stepper, servo, dan DC
biasa.
. Stepper
Motor stepper adalah perangkat elektromekanis yang bekerja dengan
mengubah pulsa elektronis menjadi gerakan mekanis diskrit. Motor stepper
bergerak berdasarkan urutan pulsa yang diberikan kepada motor. Karena itu,
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
untuk menggerakkan motor stepper diperlukan pengendali motor stepper
yang membangkitkan pulsa - pulsa periodik. Penggunaan motor stepper
memiliki beberapa keunggulan dibandingkan dengan penggunaan motor DC
lainnya. Keunggulannya antara lain adalah:
Sudut rotasi motor proporsional dengan pulsa masukan sehingga lebih mudah diatur.
Motor dapat langsung memberikan torsi penuh pada saat mulai bergerak.
Posisi dan pergerakan repetisinya dapat ditentukan secara presisi.
Memiliki respon yang sangat baik terhadap mulai, stop, dan berbalik (perputaran).
Sangat realibel karena tidak adanya sikat yang bersentuhan dengan rotor seperti pada motor DC biasa.
Dapat menghasilkan perputaran yang lambat sehingga beban dapat dikopel langsung ke porosnya.
Frekuensi putaran dapat ditentukan secara bebas dan mudah pada range yang luas.
Motor stepper juga memiliki kelemahan, yaitu:
Tidak adanya umpan balik untuk mengetahui terjadinya selisih step.
Menghasilkan suara yang sangat berisik saat beroperasi.
Torsi berkurang secara drastis seiring dengan bertambahnya kecepatan.
Daya yang dihasilkan tidak sebanding dengan ukuran dan berat motor.
Resolusi dan akurasi dapat diubah dengan mengganti motor stepper secara keseluruhan.
MODUL PEMBEL
mana posisi rotor-nya akan diinformasikan kembali ke rangkaian kontrol yang
ada di dalam motor servo. Motor ini terdiri dari sebuah motor DC, serangkaian
gear, potensiometer, dan rangkaian kontrol. Potensiometer berfungsi untuk
menentukan batas sudut dari putaran servo. Sedangkan sudut dari sumbu
motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari
kabel motor. Keunggulan dari penggunaan motor servo adalah:
Tidak bergetar dan tidak ber-resonansi saat beroperasi.
Daya yang dihasilkan sebanding dengan ukuran dan berat motor.
Penggunaan arus listik sebanding dengan beban yang diberikan.
Resolusi dan akurasi dapat diubah dengan hanya mengganti encoder yang dipakai.
Tidak berisik saat beroperasi dengan kecepatan tinggi. Selain itu, motor servo juga memiliki beberapa kelemahan, yaitu:
Memerlukan pengaturan yang tepat untuk menstabilkan umpan balik.
Motor menjadi tidak terkendali jika encoder tidak memberikan umpan balik.
Beban berlebih dalam waktu yang lama dapat merusak motor.
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
.
.
.
Motor DC biasa atau sering disebut sebagai motor DC “mainan” merupakan jenis
motor DC yang paling sederhana pengoperasiannya. Cukup dengan
memberikan tegangan pada kedua terminalnya, maka motor DC tersebut akan
berputar. Jenis motor DC ini sering ditemui pada benda yang hanya sekedar
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
.
.
.
Motor DC dengan sikat karbon (brushed DC motor) merupakan rancangan awal
sebuah motor listrik. Hingga saat ini, brushed DC motor adalah pilihan utama untuk
motor yang memiliki torsi dan kecepatan yang mudah dikendalikan. Keuntungan
menggunakan brushed DC motor adalah:
Kecepatan putar mudah dikendalikan,
Semakin besar tegangan yang diberikan, maka akan semakin cepat
putarannya. Semakin kecil tegangan yang diberikan, maka akan semakin
lambat putarannya. Dengan kata lain, kecepatan putar berbanding lurus
dengan besarnya tegangan.
.
.
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
Torsi mudah dikendalikan,
Semakin besar arus listrik yang disediakan, maka akan semakin kuat torsinya.
Semakin kecil arus listrik yang disediakan, maka akan semakin lemah torsinya.
Dengan kata lain, torsi berbanding lurus dengan besarnya arus listrik.
Kelemahan utama dari brushed DC motor adalah penggantian sikat karbon di
dalamnya harus dilakukan secara berkala dan diberi pelumasan yang cukup agar
tetap memiliki kinerja yang baik.
.
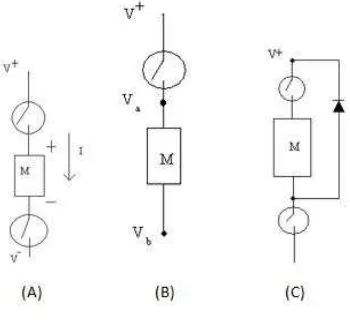
Arah putaran motor DC dapat diubah dengan membalikkan tegangan yang diberikan
pada kutub – kutubnya. Misalnya, pada terminal (+) motor dihubungkan dengan
kutub (+) catu daya dan pada terminal (-) motor dihubungkan dengan kutub (-) catu
daya, maka motor akan berputar searah jarum jam. Sedangkan bila pada terminal
(+) motor dihubungkan dengan kutub (-) catu daya dan pada terminal (-) motor
dihubungkan dengan kutub (+) catu daya, maka motor akan berputar berlawanan
arah jarum jam.
Dalam dunia robotika, pertukaran kutub catu daya terhadap terminal motor tidak
bisa dilakukan secara manual. Maka dari itu, diperlukan suatu alat yang dapat
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
.
H-bridge merupakan 4 (empat) buah saklar yang disusun membentuk huruf “H” seperti pada Gambar 6 untuk mengubah arus listrik yang mengalir melalui motor
guna mengubah arah putarannya. Pengoperasian dari H-bridge dapat ditunjukkan table berikut:
Action
On Off Off On Motor goes Clockwise
Off On On Off Motor goes Counter-clockwise
On On Off Off Motor “brakes” and decelerates
Off Off On On Motor “brakes” and decelerates
.
Saklar yang digunakan untuk membuat H-bridge bisa berupa: 4 (empat) buah SPST switches,
1 (satu) buah DPDT switch, 4 (empat) buah relay,
4 (empat) buah transistor, atau
brushed
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
4 (empat) buah FET.
SPST dan DPDT switch dikendalikan secara manual. Sedangkan relay,
transistor, dan FET dikendalikan melalui logic yang dihasilkan oleh mikrokontroler.
Flyback Diode
Pengendalian aktuator berupa beban induktif, seperti motor, secara fast-switching memerlukan komponen tambahan untuk mencegah terjadinya “lompatan” tegangan
yang dapat mengakibatkan switch terbakar. Komponen tersebut dinamakan flyback diode.
.
Gambar 7 (A) menunjukkan arus listrik mengalir melalui kumparan motor. Ketika
saklar terbuka secara tiba – tiba dan arus listrik berubah menjadi 0 (nol) secara
mendadak (0 < t < 1) seperti pada Gambar 7 (B), maka nilai akan menjadi
sangat besar. Karena motor merupakan induktor, maka berlaku
yang akan membuat tegangan pada motor menjadi sangat besar. Jika tegangan
Vb lebih besar
daripada tegangan Va, maka akan terjadi lompatan tegangan melalui saklar yang
MODUL PEMBEL daya untuk mencegah terjadinya “lompatan” tegangan yang melewati saklar
seperti pada Gambar 7 (C).
.
Voltage comparator merupakan salah satu aplikasi rangkaian op-amp yang
membandingkan 2 (dua) buah tegangan untuk menghasilkan suatu nilai logic “HIGH” atau “LOW”.
Prinsip kerja dari voltage comparator adalah sebagai berikut:
.
akan dibandingkan dengan referensi. Op-amp dihubungkan dengan Vcc = 5v dan
Vdd = 0 (ground). Jika V2 bernilai 2v, maka Vout yang akan dihasilkan adalah 5v
input pada terminal (-) lebih besar daripada tegangan input pada terminal (+).
.
Encoder merupakan sebuah perangkat yang mengubah putaran menjadi
sekumpulan sinyal digital yang berurutan. Posisi dari benda yang berputar
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
dapat diketahui dengan menghitung jumlah pulsa yang dihasilkan. Shaft encoder
merupakan encoder yang dipasang pada poros dari sebuah motor.
.
Prinsip kerja dari sebuah encoder adalah dengan membaca pancaran sinar
melalui piringan bening, yang telah diberi garis “terang” dan “gelap” pada bagian
tepinya, oleh detektor. Bila detektor tidak menerima pancaran sinar, maka sinyal
“LOW” yang dihasilkan. Bila detektor menerima pancaran sinar, maka sinyal “HIGH”
yang dihasilkan.
Secara umum, encoder memiliki 2 buah detektor, A dan B, yang diletakkan
sedemikian rupa sehingga sinyal yang dihasilkan oleh kedua detektor tersebut
memiliki selisih sebesar 90 derajat.
.
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
dapat diolah menjadi nilai yang selalu naik atau turun. Sinyal yang dihasilkan
oleh incremental encoder juga dapat digunakan untuk mengetahui arah
putaran dari motor.
.
Untuk mengetahui arah putaran motor, ada 3 parameter yang harus
diperhatikan dari sinyal yang dikeluarkan, yaitu:
A_last: Sinyal dari channel A sebelum mengalami transisi.
A_current: Sinyal dari channel A sesudah mengalami transisi.
B: Sinyal dari channel B saat / sesudah mengalami transisi. .
Sistem pengaturan lup tertutup merupakan sistem pengaturan di mana sinyal
keluaran mempunyai pengaruh langsung terhadap sinyal kontrol (aksi kontrol).
Pada sistem pengaturan lup tertutup terdapat jaringan umpan balik (feedback).
Karenanya sistem pengaturan lup tertutup seringkali disebut sebagai sistem
pengaturan umpan balik. Praktisnya, istilah pengaturan lup tertutup dan sistem
pengaturan umpan balik dapat saling dipertukarkan penggunaannya. Shaft encoder
encoder
.
encoder
LOW HIGH
encoder
.
Incremental encoder encoder
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
. )
Pulse width modulation
LOW HIGH Duty Cycle
HIGH LOW clock
cycle .
Representasi diagram blok dari sistem pengaturan lup tertutup adalah sebagai
berikut: Pada sistem pengaturan lup tertutup, sinyal keluaran dari Output Process
atau sinyal keluaran terukur dari elemen ukur (biasanya sensor atau transduser)
di-umpan- balik-kan untuk dibandingkan dengan set-point (Vset). Perbedaan antara
sinyal keluaran dan set-point yaitu sinyal kesalahan atau Verror, disajikan
ke kontroler (PID) sedemikian rupa untuk mengurangi kesalahan dan membawa
keluaran sistem ke nilai yang dikehendaki. Jadi, pada sistem pengaturan lup
tertutup, keluaran sistem digunakan untuk menentukan sinyal masukan ke Output
Process.
Discrete PID1
Dicrete PID controller merupakan pendekatan dari persamaan PID analog yang
diimplementasikan pada perangkat digital. Berikut ini adalah proses
penurunannya dari persamaan PID analog ideal:
Untuk mengubahnya menjadi dikrit, diperlukan pendekatan pada bagian
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
menjadi:
atau disederhanakan menjadi:
Dengan menggunakan persamaan PID diskrit di atas, maka nilai PWM dapat
ditentukan untuk mengatur putaran dari motor DC.
. )
Pulse width modulation atau PWM merupakan teknik menghasilkan nilai analog
secara digital selain “LOW” dan “HIGH”. Dalam PWM, dikenal istilah Duty Cycle yang
artinya adalah persentasi sinyal “HIGH” terhadap sinyal “LOW” dalam satu clock
cycle. .
Output Process
set-point set-point
Output Process
Dicrete PID controller
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
. )
Gambar13 menggambarkan penggunaan Duty Cycle yang berbeda untuk
menghasilkan nilai analog secara digital. Jika Duty Cycle = 0%, artinya nilai
analog
yang dihasilkan adalah . Jika Duty Cycle = 25%, artinya nilai
analog yang dihasilkan adalah .
.
Secara singkat, mikrokontroler adalah komputer. Berbeda dengankomputer besar
yang multifungsi seperti desktop dan laptop, mikrokontroler hanya berfungsi untuk
menjalankan “tugas” tertentu dan ditanam di dalam sebuah benda lain seperti
mesin cuci, mesin jahit, MP3 player, telepon genggam, dan perangkat lainnya yang
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
.
Sesuai dengan nama-nya, mikrokontroler memiliki ukuran yang sangat kecil
sehingga hanya membutuhkan daya yang kecil untuk mengoperasikannnya.
Mikrokontroler terdiri dari berbagai jenis dan tipe, diantaranya adalah
ATMEGA168-20PU keluaran Atmel dengan spesifikasi utama sebagai berikut:
.
Processor 8-bit 20MHz (max.)
Flash memory size 16K
size 512 bytes
PWM channel 6
External interrupt 2
PC interrupt 3
. )
Duty Cycle Duty Cycle
Duty Cycle
.
desktop laptop
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
.
1. Motor stepper adalah perangkat elektromekanis yang bekerja dengan mengubah
pulsa elektronis menjadi gerakan mekanis diskrit
2. Motor servo adalah sebuah motor DC dengan sistem umpan balik tertutup di mana
posisi rotor-nya akan diinformasikan kembali ke rangkaian kontrol yang ada di
dalam motor servo
3. Motor DC biasa atau sering disebut sebagai motor DC “mainan” merupakan jenis
motor DC yang paling sederhana pengoperasiannya. Cukup dengan memberikan
tegangan pada kedua terminalnya, maka motor DC tersebut akan berputar. Jenis
motor DC ini sering ditemui pada benda yang hanya sekedar bergerak dan tidak
memerlukan pengendalian baik kecepatan maupun posisi.
.
coba dicari contoh aplikasi motor DC yang digunakan dalam kehidupan sekitar anda.
.
1. Tuliskanlah 3 jenis dari motor DC!
2. Apakah yang dimaksud dengan motor servo?
3. Tuliskanlah Saklar yang digunakan untuk membuat H-bridge!
.
1. 3 jenis motor DC yaitu stepper, servo, dan DC biasa.
2. Motor servo adalah sebuah motor DC dengan sistem umpan balik tertutup di mana
posisi rotor-nya akan diinformasikan kembali ke rangkaian kontrol yang ada di
dalam motor servo
3. Saklar yang digunakan untuk membuat H-bridge bisa berupa:
4 (empat) buah SPST switches, 1 (satu) buah DPDT switch, 4 (empat) buah relay,
MODUL PEMBEL
1. Tuliskanlah 3 jenis dari motor DC!
………..
………..
………..
………..
………..
2. Apakah yang dimaksud dengan motor servo?
………..
………..
………..
………..
………..
3. Tuliskanlah Saklar yang digunakan untuk membuat H-bridge!
………..
Diakhir pembelajaran diharapkan peserta didik dapat memahami jenis-jenis dari motor
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
Motor stepper adalah salah satu jenis motor dc yang dikendalikan dengan
pulsa-pulsa digital. Prinsip kerja motor stepper adalah bekerja dengan mengubah pulsa-pulsa
elektronis menjadi gerakan mekanis diskrit dimana motor stepper bergerak
berdasarkan urutan pulsa yang diberikan kepada motor stepper tersebut.
Kelebihan Motor Stepper
Kelebihan motor stepper dibandingkan dengan motor DC biasa adalah :
Sudut rotasi motor proporsional dengan pulsa masukan sehingga lebih mudah diatur.
Motor dapat langsung memberikan torsi penuh pada saat mulai bergerak
Posisi dan pergerakan repetisinya dapat ditentukan secara presisi
Memiliki respon yang sangat baik terhadap mulai, stop dan berbalik (perputaran)
Sangat realibel karena tidak adanya sikat yang bersentuhan dengan rotor seperti pada motor DC
Dapat menghasilkan perputaran yang lambat sehingga beban dapat dikopel langsung ke porosnya
Frekuensi perputaran dapat ditentukan secara bebas dan mudah pada range yang luas.
.
Prinsip kerja motor stepper adalah mengubah pulsa-pulsa input menjadi gerakan
mekanis diskrit. Oleh karena itu untuk menggerakkan motor stepper diperlukan
pengendali motor stepper yang membangkitkan pulsa-pulsa periodik.
.
Gambar diatas memberikan ilustrasi dari pulsa keluaran pengendali motor stepper
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
.
Berdasarkan struktur rotor dan stator pada motor stepper, maka motor stepper
dapat dikategorikan dalam 3 jenis sebagai berikut :
. )
Motor stepper jenis ini telah lama ada dan merupakan jenis motor yang secara
struktural paling mudah untuk dipahami. Motor ini terdiri atas sebuah rotor besi
lunak dengan beberapa gerigi dan sebuah lilitan stator. Ketika lilitan stator diberi
energi dengan arus DC, kutub-kutubnya menjadi termagnetasi. Perputaran
terjadi ketika gigi-gigi rotor tertarik oleh kutub-kutub stator. Berikut ini adalah
penampang melintang dari motor stepper tipe variable reluctance (VR):
. )
. )
Motor stepper jenis ini memiliki rotor yang berbentuk seperti kaleng bundar (tin
can) yang terdiri atas lapisan magnet permanen yang diselang-seling dengan
kutub yang berlawanan. Dengan adanya magnet permanen, maka intensitas
fluks magnet dalam motor ini akan meningkat sehingga dapat menghasilkan
torsi yang lebih besar. Motor jenis ini biasanya memiliki resolusi langkah (step)
yang rendah yaitu antara 7,50 hingga 150 per langkah atau 48 hingga 24 langkah
.
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
setiap putarannya. Berikut ini adalah ilustrasi sederhana dari motor stepper tipe
permanent magnet :
. )
. )
Motor stepper tipe hibrid memiliki struktur yang merupakan kombinasi dari
kedua tipe motor stepper sebelumnya. Motor stepper tipe hibrid memiliki
gigi-gigi seperti pada motor tipe VR dan juga memiliki magnet permanen yang
tersusun secara aksial pada batang porosnya seperti motor tipe PM. Motor tipe
ini paling banyak digunkan dalam berbagai aplikasi karena kinerja lebih baik.
Motor tipe hibrid dapat menghasilkan resolusi langkah yang tinggi yaitu antara
3,60 hingga 0,90 per langkah atau 100-400 langkah setiap putarannya. Berikut ini
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
.
Berdasarkan metode perancangan rangkain pengendalinya, motor stepper dapat
dibagi menjadi 2 jenis yaitu motor stepper unipolar dan motor stepper bipolar.
.
Rangkaian pengendali motor stepper unipolar lebih mudah dirancang karena
hanya memerlukan satu switch / transistor setiap lilitannya. Untuk menjalankan
dan menghentikan motor ini cukup dengan menerapkan pulsa digital yang hanya
terdiri atas tegangan positif dan nol (ground) pada salah satu terminal lilitan
(wound) motor sementara terminal lainnya dicatu dengan tegangan positif
konstan (VM) pada bagian tengah (center tap) dari lilitan seperti pada gambar
berikut.
. )
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
.
.
Untuk motor stepper dengan lilitan bipolar, diperlukan sinyal pulsa yang
berubah-ubah dari positif ke negatif dan sebaliknya. Jadi pada setiap terminal lilitan (A &
B) harus dihubungkan dengan sinyal yang mengayun dari positif ke negatif dan
sebaliknya. Karena itu dibutuhkan rangkaian pengendali yang agak lebih
kompleks daripada rangkaian pengendali untuk motor unipolar. Motor stepper
bipolar memiliki keunggulan dibandingkan dengan motor stepper unipolar dalam
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
.
.
1. Motor stepper adalah salah satu jenis motor dc yang dikendalikan dengan
pulsa-pulsa digital
2. Prinsip kerja motor stepper adalah mengubah pulsa-pulsa input menjadi gerakan
mekanis diskrit. Oleh karena itu untuk menggerakkan motor stepper diperlukan
pengendali motor stepper yang membangkitkan pulsa-pulsa periodik.
3. 5 jenis motor stepper
1. Motor Stepper Variable Reluctance (VR)
2. Motor Stepper Permanent Magnet (PM)
3. Motor Stepper Hybrid (HB)
4. Motor Stepper Unipolar
5. Motor Stepper Bipolar
.
Diskusikan dengan teman kelompok praktekmu, dan jelaskan lebih lanjut kegunaan
motor stepper di dunia industri.
.
1. Jelasknlah maksud dari pengertian motor stepper! .
MODUL PEMBEL
2. Jelaskanlah prinsip kerja dari motor stepper!
3. Tuliskanlah 3 jenis dari motor stepper!
.
1. Motor stepper adalah salah satu jenis motor dc yang dikendalikan dengan
pulsa-pulsa digital
2. Prinsip kerja motor stepper adalah mengubah pulsa-pulsa input menjadi gerakan
mekanis diskrit. Oleh karena itu untuk menggerakkan motor stepper diperlukan
pengendali motor stepper yang membangkitkan pulsa-pulsa periodik.
3. 5 jenis motor stepper
1. Motor Stepper Variable Reluctance (VR)
2. Motor Stepper Permanent Magnet (PM)
3. Motor Stepper Hybrid (HB)
4. Motor Stepper Unipolar
5. Motor Stepper Bipolar
.
1. Jelasknlah maksud dari pengertian motor stepper!
………..
2. Jelaskanlah prinsip kerja dari motor stepper!
………..
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
………..
………..
………..
………..
………..
. .
1. Peserta didik dapat memahami definisi dari motor seri
2. Peserta didik dapat memahami cara membalikkan putaran motor seri
3. Peserta dapat memahami cara membalikkan putaran motor induksi
4. Peserta didik dapat mengetahui penyebab kerusakan motor listrik
. .
Motor seri adalah motor DC yang dimana gulungan medan dihubungkan secara seri
dengan gulungan dinamo / armature. Sehingga arus medan sama dengan arus
dinamo. Motor seri ini memberikan torsi awal yang besar sehingga cocok untuk
penggunaan yang memerlukan torsi penyalaan yang besar, seperti derek dan alat
pengangkat hoist.
Karena besarnya arus medan sama dengan besarnya arus pada dinamo. Maka
belitan atau gulungan medan terbuat dari kawat kuat yang berukuran cukup besar,
sehingga mampu untuk membawa arus beban. Ukuran kawat yang besar ini
membuat gulungan medan hanya terdiri dari beberapa putaran kawat saja.
Perhatikan gambar diagram dari motor DC seri dibawah ini
. .
MODUL PEMBEL
Jumlah arus yang melewati belitan menentukan besarnya torsi poros motor yang
dihasilkan. Karena medan seri yang terbuat dari konduktor yang berukuran besar
sehingga mampu membawa arus yang besar pula, maka torsi yang dihasilkannya
pun juga besar. Misalnya, motor starter yang digunakan untuk menghidupkan mesin
sebuah mobil adalah motor seri dan mungkin menarik sampai 500 A ketika memutar
poros engkol mesin pada pagi hari yang dingin. Motor seri yang digunakan pada
crane atau kerekan listrik dapat menarik arus hingga ribuan ampere selama
beroperasi.
Motor seri dapat beroperasi dengan aman dalam menangani arus yang begitu besar
karena motor ini tidak beroperasi untuk periode yang panjang atau lama. Dalam
sebagian besar aplikasi, motor hanya beroperasi selama beberapa detik. Bayangkan
saja, berapa lama motor starter pada mobil harus beroperasi untuk menghidupkan
mesin mobil.
Prinsip dasar motor seri mudah dimengerti. Ketika tegangan tersedia, arus mulai
mengalir dari terminal catu daya negatif ke gulungan medan dan dinamo. Pada saat
itu dinamo tidak langsung berputar, dan satu-satunya hambatan pada rangkaian ini
adalah konduktor yang digunakan pada gulungan medan dan dinamo. Dan hal ini
membuat motor menarik sejumlah besar arus dari catu daya. Ketika arus mulai
mengalir ke gulungan medan dan dinamo, akan menimbulkan medan magnet. Dan
saat arus yang mengalir begitu besar, akan menyebabkan kumparan mencapai
kejenuhan dan akan menghasilkan medan magnet terkuat.
. )
Kekuatan dari medan magnet memberikan torsi terbesar pada poros
angker/armature. Torsi yang besar menyebabkan angker berputar dengan
jumlah daya maksimum. Ketika angker mulai berputar, maka tegangan akan
dihasilkan. Konsep ini sulit dimengerti karena angker/armature merupakan
bagian dari motor saat ini.
Perlu untuk diingat dari teori-teori dasar magnet, bahwa setiap medan magnet
melewati kumparan maka arus akan dihasilkan. Semakin kuat medan magnet
MODUL PEMBEL
keseluruhan dari tegangan ini adalah hal ini akan mengurangi tegangan supply
sehingga gulungan motor melihat potensi tegangan yang lebih kecil.
Jika motor seri kehilangan sedikit arus, kecepatan motor akan semakin
meningkat. Semakin mengurangnya arus ini juga berarti semakin mengurangnya
torsi motor, sedangkan kecepatan motor akan semakin meningkat. Karena
beban bergerak ketika angker mulai menambah kecepatan, maka aplikasi hanya
akan membutuhkan sedikit torsi untuk menjaga beban bergerak. Dan ini akan
menguntungkan motor karena secara otomatis mengurangi arus motor ketika
beban mulai bergerak. Hal ini juga berarti mengurangi sedikit penumpukan
panas pada motor.
Kondisi seperti ini dapat menyebabkan masalah jika motor seri kehilangan
beban. Beban bisa saja hilang karena beberapa sebab, seperti poros atau shaft
motor patah misalnya. Ketika hal seperti ini terjadi, arus beban akan jatuh ke
minimum, jumlah tegangan kembali yang ditimbulkan angker akan berkurang.
Dan ketika angker tidak menghasilkan tegangan kembali(EMF back) yang cukup,
dan ketika beban tidak lagi menjadi penahan pada poros motor, angker akan
mulai berputar lebih cepat dan lebih cepat. Ini akan terus meningkatkan
kecepatan rotasi sampai beroperasi pada kecepatan yang sangat tinggi. Ketika
angker berputar dalam kecepatan sangat tinggi dan tidak terkendali, motor tidak
akan dapat bertahan dan akan mengalami kerusakan parah. Kondisi seperti ini
disebut pelarian(runaway). Dan karena itulah mengapa motor DC seri harus
memiliki beberapa jenis proteksi pelarian (runaway protection). Sebuah saklar
sentrifugal dapat dihubungkan ke motor untuk memutus daya(de-energy)
kumparan starter motor jika rpm motor melebihi batas yang telah ditetapkan.
Proteksi dengan sensor juga dapat dilakukan untuk memutus daya rangkaian
jika arus drop atau menurun sementara tegangan penuh tetap mengalir pada
motor. Bagian paling penting untuk diingat tentang motor seri adalah hal sulit
untuk mengontrol rpm atau kecepatan dengan cara eksternal karena
kecepatannya tergantung atau ditentukan dari ukuran beban. (Dalam beberapa
motor seri yang lebih kecil, kecepatan dapat dikontrol dengan memasang
rheostat secara seri dengan tegangan suplai untuk mengontrol tegangan yang
masuk ke motor dengan cara resistansi).
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
Gambar kurva dibawah ini menunjukkan hubungan antara kecepatan motor seri
dengan arus dinamo. Dari gambar ini bisa terlihat ketika arus rendah, kecepatan
motor akan maksimum. Dan ketika arus meningkat, kecepatan motor akan
menurun. Dari kurva ini juga dapat dilihat bahwa motor seri ini akan mengalami
runaway atau pelarian (kecepatan meningkat tak terkendali) jika arus dinamo
turun menjadi nol. (penting untuk diingat bahwa motor DC yang lebih besar yang
biasa digunakan di industri, dalam setiap kerugian gesekan yang terjadi akan
sedikit membatasi kecepatan tertinggi).
.
. )
Arah putaran motor seri ini dapat diubah atau dibalik dengan merubah polaritas
salah satu gulungan baik itu angker atau gulungan medan. Penting untuk diingat
bahwa jika anda hanya mengubah polaritas tegangan, maka itu sama saja
dengan mengubah polaritas dari kedua gulungan (angker dan medan) dan arah
putaran motor akan tetap sama
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
Karena hanya polaritas satu gulungan yang dibalik, gulungan angker/armature
yang biasanya dibalik karena lebih mudah hanya dengan membalik polaritas
sikat(brush). Membalik putaran motor biasanya juga dengan mengubah kabel
sehingga polaritas gulungan angker berubah dan arah putaran motor juga
berubah. Pada gambar diagram dibawah ini terlihat terminal angker ditandai
dengan A1 dan A2 sedangkan terminal medan ditandai dengan S1 dan S2.
.
Dari gambar diagram diatas terlihat ketika motor berputar maju(forward), kontak
F menutup dan kontak R tetap terbuka, sehingga menghubungkan catu daya
positif dengan terminal angker A1 dan terminal angker A2 terhubung dengan
terminal medan S1 dimana ujung terminal yang satunya (S2) terhubung dengan
catu daya negatif. Sedangkan ketika motor berputar mundur (reverse), kontak R
menutup dan kontak F terbuka, sehingga membalik polaritas angker, dimana A2
kini terhubung dengan catu daya positif dan A1 terhubung dengan terminal
medan S1-S2 yang terhubung dengan catu daya negatif. Dan dari rangkaian
diagram kontrolnya terlihat sama saja dengan diagram kontrol forward reverse
biasanya
.
Motor induksi 3 fasa adalah motor yang paling populer atau paling banyak
digunakan dalam penggerak mesin-mesin di industri. Seperti penggerak pada
pompa, conveyor, kompresor, blower, dan lain-lain. Hal itu mungkin dikarenakan .
. )
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
motor induksi ini mempunyai beberapa keunggulan yang tidak dimiliki oleh
motor-motor jenis yang lain, seperti ; kontruksinya yang sederhana, tahan lama,
perawatannya mudah, dan punya efisiensi yang tinggi. .
Rangkaian star delta adalah rangkaian instalasi motor dengan sambungan
bintang segitiga (Y∆), atau lebih dikenal dengan nama koneksi star delta. Fungsi
dari koneksi star delta adalah untuk menurunkan atau mengurangi besarnya
arus start motor. Semakin besar tegangan maka arus akan semakin kecil begitu
sebaliknya semakin kecil tegangan maka arus akan semakin besar. Bagaimana
itu terjadi ?untuk menjawab itu kita harus tahu dulu, hubungan antara daya ( P ),
tegangan( V ) , dan arus ( I ).
Dari rumus diatas tentu kita sudah mengerti. Jika kita hitung berapa besarnya
arus ( I ), dengan daya (P) yang sama, dibagi dengan tegangan(V) yang berbeda.
Tentu saja hasilnya sudah bisa ditebak, dengan tegangan yang besar maka arus
akan kecil, begitu juga sebaliknya. Lalu apa hubungannya rumus diatas dengan
rangkaian star delta? Pada koneksi star delta ada perbedaan antara besarnya
tegangan pada koneksi star dan besarnya tegangan pada koneksi delta.
Gambar 25 bisa menjadi patokan bagaimana melihat koneksi star delta yang
benar dan salah. Contohnya: perhatikan gambar pada sebuah rangkaian daya
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
gambar koneksi star delta diatas. Jika itu mirip atau sama bisa dipastikan
rangkaian daya itu benar. Dan juga perlu diingat jika ingin membalik putaran
motor pada rangkaian star delta dengan membalik salah satu tegangan maka
anda juga harus membalik salah satu tegangan pada satu sisi yang lain.
.
Jika pemasangan instalasi motor itu harus sesuai standar yang ditentukan agar
tidak terjadi hasil yang tidak diinginkan seperti lilitan motor terbakar dikarenakan
phase loss, hubungan singkat atau sebab-sebab lainnya. Khususnya kita harus
berhati-hati pada motor yang label terminalnya sudah hilang atau motor hasil
repairan/perbaikan yang mungkin sudah tidak sesuai lagi antara terminal dan
lilitannya. Jadi kita harus bisa tentukan dulu mana U1U2, V1V2, dan W1W2 .
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
.
. .
Untuk membalik arah putaran motor induksi 3 fasa adalah dengan membalik
salah satu polaritas tegangan yang masuk ke motor. coba perhatikan gambar
dibawah ini
.
Pada gambar diatas terlihat kalau motor akan berputar ke kanan (forward) jika
terminal belitan/winding motor menerima tegangan RST dengan R terhubung
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
tegangan RST dengan R terhubung dengan U, S terhubung dengan W dan T
terhubung dengan V. Dengan kata lain tegangan RST dibalik menjadi RTS.
Membalik dengan polaritas yang lain juga bisa, seperti R dengan S, atau R
dengan T.
Untuk mengubah atau membalik polaritas tegangan RST itu biasanya digunakan
rangkaian pengendali mekanik dan magnetik yaitu rangkaian kontaktor. Dan
sebagai pengaman motor dipasang juga pelindung motor (thermal overload).
Perhatikan gambar diagram utama/daya forward reverse berikut ini.
. . ) )
Gambar diatas menunjukkan bahwa motor akan berputar ke kanan(forward), jika
K1 bekerja. Saat kontaktor 1 bekerja, tegangan RST akan masuk ke motor secara
berurutan. Dan gambar diatas juga menjelaskan kalau motor akan berputar ke
kiri(reverse), jika K2(kontaktor 2) bekerja. Saat K2 bekerja maka polaritas
tegangan RST yang masuk kemotor akan dibalik menjadi TSR.(lihat gambar
diatas).dan yang terjadi adalah motor akan berputar ke kiri.
Untuk mengatur atau mengendalikan kedua kontaktor tersebut diperlukan
rangkaian kontrol forward reverse. Dan dibawah ini adalah diagram rangkaian .
. .
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
kontrol forward reverse. Perhatikan gambar berikut, dan pahami bagaimana cara
kerjanya.
.
Tegangan kerja koil kontaktor pada gambar rangkaian kontrol diatas adalah
220VAC. Sehingga gambar diatas mendapatkan catu daya fasa(R) dan nol(N).
Namun biasanya juga digunakan kontaktor dengan koil kerja 380VAC, jadi harus
diberi catu daya dengan tegangan line(fasa-fasa). Tegangan line disini berarti
R-S,R-T atau S-T. Pemberian tegangan ini sebenarnya tergantung dari koil
kontaktornya karena bisa juga tegangan kerja koil itu 100V,200V dan
sebagainya. Pada gambar diatas terlihat bahwa arus listrik akan mengalir dan
mengaktifkan K1 jika tombol ON1 ditekan. Meskipun ON1 dilepas K1 akan tetap
aktif, hal ini dikarenakan ada interlock dari kontak bantu NO(K1) yang dipasang
pararel dengan ON1. Sehingga arus listrik tetap mengalir ke koil kontaktor lewat
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
yang dipasang secara seri dengan koil K2, dan sebaliknya kontak bantu NC(K2)
yang dipasang seri denga koil K1. Kontak bantu NC disini berfungsi sebagai
interlock pengaman. Misalnya, jika ON1 ditekan dan K1 aktif (motor berputar
forward), meskipun ON2 ditekan maka arus listrik tidak akan mengalir ke koil K2,
karena NC(K1) tersebut telah membuka. Dan untuk membalik putaran(reverse),
maka harus ditekan tombol OFF terlebih dahulu, sehingga K1 off dan tombol ON2
sekarang bisa ditekan untuk mengaktifkan koil K2. Sehingga motor bisa berputar
ke kiri (reverse)
Membalikkan putaran motor kapasitor satu fasa
Motor capasitor merupakan motor listrik AC satu fasa. Motor capasitor ini biasa
kita jumpai pada pompa air, kompresor AC, mesin cuci, dan lain sebagainya.
Konstruksi pada motor capasitor ini sangat sederhana dan berdaya kecil dengan
tegangan 220VAC. Stator motor capasitor ini hanya terdiri dari 2
kumparan/lilitan. Satu kumparan utama dan satu kumparan bantu. Motor ini
memiliki capasitor yang dihubungkan secara seri dengan belitan bantu dan
pararel dengan belitan utama. Fungsi dari kapasitor itu sendiri adalah untuk
memperbesar kopel atau torsi start awal , mengurangi arus start awal motor,
serta mempertajam pergeseran beda fasa antara belitan utama dan belitan
bantu hingga mendekati 90⁰. Untuk membalik atau merubah putaran motor ini
sangat mudah, yaitu hanya dengan membalik polaritas kumparan utama atau
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
.
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
anda membalik kedua polaritas gulungan utama dan gulungan bantu. Dan
hasilnya arah putaran motor akan tetap sama atau tidak berubah.
.
Kebanyakan kerusakan dari motor listrik disebabkan oleh beberapa faktor seperti :
Panas, Kotor, Lembab, Vibrasi, dan Kualitas dari sumber listrik. Dengan mengetahui
beberapa faktor penyebab kerusakan motor tersebut kita dapat mengurangi atau
mengeliminir jumlah kerusakan, kerugian, dan ongkos perbaikan. Sehingga
menurunkan biaya (cost down) operasional tentunya dalam hal maintenance
motor/mesin itu sendiri.
.
Faktor kerusakan dapat dibagi menurut beberpa faktor seperti :
1. Dibagi menurut asal sebab munculnya faktor kerusakan :
kerusakan dari luar motor : kualitas sumber tenaga listrik, kondisi lingkugan panas/lembab/tidak ada ventilasi, kondisi beban
kerusakan dari dalam motor : aging/penuaan, life time seperti dari bearing, rotor atau dari stator itu sendiri
2. Dibagi menurut jenis faktor kerusakan
Kerusakan karena listrik(kualitas listrik) :
MODUL PEMBEL
berlebihan(over heating) yang disebabkan oleh over current karena
hilangnya salah satu tegangan phasa. untuk mengatasi faktor kerusakan
ini bisa memakai protector relay seperti TOR/OCR(Over Current Relay)
untuk mematikan sistem. Untuk kasus yang ini tidak akan berpengaruh
pada motor yang sistem kontrolnya memakai inverter karena inverter juga
bisa menjadi protector pada motor namun juga dapat memperpendek
umur/life time dari inverter itu sendiri.
under/over voltage dapat menimbulakan overheating didalam winding, berakibat umur motor menjadi pendek. Voltage spike akibat power
swicthing atau serangan halilintar (lightning strikes) juga menyebabkan
kerusakan isolasi winding. Kualitas suply tenaga sangat menentukan umur
motor listrik, maka hal-hal diatas memang harus dihindari dengan cara
menjaga kualitas listrik/mematikan sistem dari motor listrik tersebut.
3. Kerusakan mekanis.
Panas /over-heating: Penyebab terbesar kerusakan motor sehingga motor tidak dapat mencapai umur pakai yang seharusnya ialah “over-heating atau
panas berlebihan”, Setiap mengalami Kenaikan temperature 10 derajat,
dari temperature normalnya, berakibat memotong umur motor 50% ,
meskipun kenaikan terjadi hanya sementara.
4. Sebab over heating
Memilih motor terlalu kecil, sehingga motor harus menderita over-current, berarti kondisi operasinya lebih panas. Tetapi jika memilh motor terlalu
besar berakibat pemakaian listrik tidak efisien berarti pemborosan.
Sistem starting, kebanyakan motor dipasang dengan “direct starting”. sistem ini menimbulkan arus Starting-current terlampau besar (3 kali lebih),
sehingga menimbulkan panas yang besar, lebih2 jika sering start-stop.
Untuk itu perlu dipasang sistem start al: star-delta, fluid-couplig,
pengubah-frequensi,dll
Start-stop terlalu sering tanpa memperhartikan jedah antar waktu start sangat menimbulkan kerusakan. (lihat tabel minmum jedah waktu)
MODUL PEMBEL
Ventilasi ruang kurang bagus menimbulkan system pendinginan motor tidak baik. Mengakibatkan operating temperature motor naik.
Kondisi motor: fan rusak, body motor kotor, saluran pendingin buntu/kotor dll.
Kondisi beban : kopling misaligment, beban terlalu besar, beban tidak normal,
5. Kotor ,Debu / Kotoran yg terakumulasi akan merusak komponen listrk maupun
mekanical. Umumnya terakumulasi pada permukaan badan motor , saluran
pendinginan, fan mengakibatkan pendinginan terganggu dan panasan motor
berlebih. Motor type ODP , kotoran debu masuk dan terkumpul kedalam winding
menimbulkan kerusakan isolasi / winding.
6. Moisture / lembab, Lembab atau embun juga merusak komponen listrik dan
mekanikal, yang mengakibatkan pengkaratan pada poros, bearing, rotor, stator,
laminasi. Jika penetrasi ke isolasi mengkaibatkan degradasi isolasi dan rusak.
7. Vibrasi, Vibrasi merupakan indikasi bahwa kondisi motor sedang mengalami
masalah. Besar Vibrasi yang melebih harga yang diijinkan dapat menyebabkan
kerusakan yang lebih parah. Sumber vibrasi dapat dari motor atau dari mesin
yang digerakan (load) bahkan mungkin juga dari kedua2nya.
Sebab vibrasi antara lain dari kondisi:
Misalignment motor terhadap load(mesin yang digerkakkan/beban)
Kendor pada fondasi nya Motor atau load
Kondisi Soft-foot pada fondasi nya Motor atau load
Rotor unbalance ( Motor atau load)
Bearing aus atau rusak, meyebabkan poros berputar tidak sentris.
Akumulasi karat atau kotoran pada komponen putar (rotor)
Sewaktu memasang rotor/bearing motor sehabis overhaul/rewinding tidak aligment.
8. Beberapa sebab lain:
Pemilihan pelumas harus sesuai specifikasi, penggantian/penambahan dilakukan dan terjadwal dengan baik.
Pemilihan dan pemeliharaan kopling sama pentingnya dengan komponen lain.
pemasangan bearing dan komponen lain harus sesuai dengan standard.
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
Setelah kita mengetahui beberapa sebab kerusakan, kita dapat merencanakan
program pemeliharaan dan langkah pelaksanaan yang sesuai dan terjadwal
untuk menambah umur dari motor listrik tersebut.
.
1. Motor seri adalah motor DC yang dimana gulungan medan dihubungkan secara seri
dengan gulungan dinamo / armature. Sehingga arus medan sama dengan arus
dinamo. Motor seri ini memberikan torsi awal yang besar sehingga cocok untuk
penggunaan yang memerlukan torsi penyalaan yang besar, seperti derek dan alat
pengangkat hoist
2. Arah putaran motor seri ini dapat diubah atau dibalik dengan merubah polaritas
salah satu gulungan baik itu angker atau gulungan medan. Penting untuk diingat
bahwa jika anda hanya mengubah polaritas tegangan, maka itu sama saja dengan
mengubah polaritas dari kedua gulungan (angker dan medan) dan arah putaran
motor akan tetap sama
3. Kebanyakan kerusakan dari motor listrik disebabkan oleh beberapa faktor seperti :
Panas, Kotor, Lembab, Vibrasi, dan Kualitas dari sumber listrik
4. Penyebab kerusakan dibagi menurut asal sebab munculnya faktor kerusakan :
kerusakan dari luar motor : kualitas sumber tenaga listrik, kondisi lingkugan panas/lembab/tidak ada ventilasi, kondisi beban
kerusakan dari dalam motor : aging/penuaan, life time seperti dari bearing, rotor atau dari stator itu sendiri
.
Gambarkanlah pada kertas HVS ukuran A4 Diagram forward reverse motor seri!.
.
1. Apakah yang dimaksud dengan motor seri? Jelaskan!
2. Bagaimanakah cara membalik putaran motor DC seri?
3. Tuliskanlah Penyebab kerusakan dibagi menurut asal sebab munculnya faktor
MODUL PEMBEL
1. Motor seri adalah motor DC yang dimana gulungan medan dihubungkan secara seri
dengan gulungan dinamo / armature. Sehingga arus medan sama dengan arus
dinamo. Motor seri ini memberikan torsi awal yang besar sehingga cocok untuk
penggunaan yang memerlukan torsi penyalaan yang besar, seperti derek dan alat
pengangkat hoist
2. Arah putaran motor seri ini dapat diubah atau dibalik dengan merubah polaritas
salah satu gulungan baik itu angker atau gulungan medan. Penting untuk diingat
bahwa jika anda hanya mengubah polaritas tegangan, maka itu sama saja dengan
mengubah polaritas dari kedua gulungan (angker dan medan) dan arah putaran
motor akan tetap sama. Karena hanya polaritas satu gulungan yang dibalik,
gulungan angker/armature yang biasanya dibalik karena lebih mudah hanya dengan
membalik polaritas sikat(brush). Membalik putaran motor biasanya juga dengan
mengubah kabel sehingga polaritas gulungan angker berubah dan arah putaran
motor juga berubah
3. Penyebab kerusakan dibagi menurut asal sebab munculnya faktor kerusakan :
kerusakan dari luar motor : kualitas sumber tenaga listrik, kondisi lingkugan panas/lembab/tidak ada ventilasi, kondisi beban
kerusakan dari dalam motor : aging/penuaan, life time seperti dari bearing, rotor atau dari stator itu sendiri
.
1. Apakah yang dimaksud dengan motor seri? Jelaskan!
………..
2. Bagaimanakah cara membalik putaran motor DC seri?
MODUL PEMBEL
3. Tuliskanlah Penyebab kerusakan dibagi menurut asal sebab munculnya faktor
kerusakan!
Diakhir pembelajaran diharapkan peserta didik dapat menghitung arus, daya, kecepatan
dan torsi pada motor listrik.
. .
Motor listrik adalah suatu perangkat elektromagnetik yang digunakan untuk
mengkonversi atau mengubah energi listrik menjadi energi mekanik. Hasil konversi
ini atau energi mekanik ini bisa digunakan untuk berbagai macam keperluan seperti
digunakan untuk memompa suatu cairan dari satu tempat ke tempat yang lain pada
mesin pompa, untuk meniup udara pada blower, digunakan sebagai kipas angin, dan
keperluan – keperluan yang lain. Berdasarkan jenis dan karakteristik arus listrik yang
masuk dan mekanisme operasinya motor listrik dibedakan menjadi 2, yaitu motor
AC, dan motor DC. Namun pada artikel kali ini kita akan membahas sedikit tentang
motor AC, beserta cara menghitung arus, daya, dan kecepatan pada motor tersebut.
Ada 2 jenis motor pada motor AC, yaitu :
1. Motor sinkron, yaitu motor AC (arus bolak-balik) yang bekerja pada kecepatan
tetap atau konstan pada frekuensi tertentu. Kecepatan putaran motor sinkron
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
searah (DC) yang dihubungkan ke rotor untuk menghasilkan medan magnet
rotor. Motor ini disebut motor sinkron karena kutup medan rotor mendapat
tarikan dari kutup medan putar stator hingga turut berputar dengan kecepatan
yang sama (sinkron).
2. Motor induksi, yaitu motor AC yang paling umum digunakan di industri –
industri. Pada motor DC arus listrik dihubungkan secara langsung ke rotor
melalui sikat-sikat(brushes) dan komutator(commutator). Jadi kita bisa
mengatakan motor DC adalah motor konduksi. Sedangkan pada motor AC, rotor
tidak menerima sumber listrik secara konduksi tapi dengan induksi. Oleh karena
itu motor AC jenis ini disebut juga sebagai motor induksi.
. .
.
Contoh : hitung kecepatan putar motor 4 poles/kutup jika motor dioperasikan
dengan frekuensi 50 hz.
ns = (120. F)/ P = (120 . 50)/ 4 = 1500 rpm .
Contoh : hitung slip motor jika diketahui kecepatan motor 1420 rpm. Dengan
kecepatan sinkron yang sama dengan hasil diatas.
% slip = ((ns - n)/ ns) x 100 = ((1500 - 1420)/ 1500)x 100 = 5 %
. ) )
φ). .
.
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
Menggunakan rumus
Contoh. Hitung besarnya arus(ampere) motor dengan daya 1 kw dan
tegangan 220V dengan faktor daya 0,88.
I = P / V. Cos φ...P = 1 kw = 1000 watt
I = 1000/(220 . 0,88) = 5 Ampere
Mengunakan alat ukur
MODUL PEMBEL
MCB atau pada beban untuk menghindari ampere beban lebih besar dari
skala ampere pada alat ukur. (ingat : arus beban yang lebih tinggi dari
skala alat ukur dapat merusak alat ukur).
2. Pasang tang ampere pada salah satu kabel fasa tersebut. Lihat seperti
pada gambar 2 diatas. pengambilan kabel pengukuran bisa setelah
kontaktor dan OCR(over current relay) ataupun sebelum kontaktor. Anda
bisa juga mengukurnya dari sebelum MCB asalkan tidak ada
percabangan beban(pararel).
3. Angka hasil pengukuran arus akan keluar di monitor tang ampere.
Gambar nomor 3.
4. Ukur semua atau ketiga kabel fasa tersebut (R, S, T).
Dari hasil pengukuran RST tersebut batas toleransi perbedaan antar fasa
adalah +0,5 A ~ -0,5A . Jika perbedaan hasil pengukuran antar fasa lebih
besar dari itu, maka perlu pengecekan lebih lanjut karena hal itu juga
merupakan abnormal. Hal ini terjadi akibat beberapa sebab, seperti:
Tegangan listrik RST tidak seimbang, bisa juga disebabkan dari kontaktor, kabel, MCB, ataupun memang dari sumber PLN.
Isolasi belitan motor yang sudah jelek, mungkin disebabkan karena sudah lewat lifetime, panas, dan lain-lain.
Hambatan atau impedansi(Z) dari belitan motor yang tidak seimbang. Jika dari hasil pengukuran arus atau ampere lebih tinggi dari arus nominal
yang tertera pada nameplate motor. maka dalam kondisi ini akan sangat
berbahaya atau mengancam motor, karena hal ini menyebabkan panas yang
bisa berakibat kebakaran pada belitan motor. Kebanyakan hal seperti ini
terjadi karena :
Bearing seret atau aus, hal ini kemungkinan disebabkan karena; life time, panas, kopling beban tidak center, impeller tidak ballance, dan lain-lain.
Beban terlalu berat (overload), disebabkan karena, jammed/macet/menyumbat, daya motor terlalu kecil (salah pilih motor),
Phase loss(hilangnya salah satu fasa), kebanyakan hal ini terjadi karena rusaknya kontak utama pada kontaktor, namun biasanya juga terjadi
karena diakibatkan dari sumber PLN yang terputus. Memang sebab
φ...P
MODUL PEMBEL
ampere motor naik karena phase losses jarang terjadi namun phase loss
inilah yang sangat berbahaya pada motor, karena kerusakan motor yang
disebabkan hilangnya salah satu tegangan fasa ini(phase loss) tidak bisa
diperkirakan/diduga oleh mekanik. Ketika salah satu tegangan fasa
hilang maka dengan seketika ampere motor akan naik dengan drastis,
dan dengan seketika pula belitan motor akan terbakar/terputus. Maka
dari itu pentingnya sebuah pengaman motor, seperti OCR(Over Current
relay) untuk mematikan sistem instalasi motor jika terjadi over
current/arus lebih.
Untuk mengetahui apa yang menyebabkan arus atau ampere yang begitu
tinggi, maka diperlukan pengecekan satu-persatu. Berikut ini adalah
langkah-langkah yang harus diambil bila hasil pengukuran ampere motor abnormal
(ampere tinggi /over current):
1. Matikan motor atau mesin, matikan juga MCB motor tersebut demi
keselamatan.
2. Cek sumber tegangan RST yang masuk ke motor,(gunakan ohm meter
untuk mengetahui kondisi kontaktor, kabel, dan motor), jika tidak ada
masalah dengan sumber tegangan motor, dan motor, lanjutkan dengan
mengecek sebab-sebab mekanis,
3. Lepaskan motor dari beban (seperti; mesin, impeller, pompa, kompresor,
atau beban-beban motor lainnya).
4. Jalankan motor tanpa beban secara manual dengan tangan, apa putaran
motor seret atau terdengar suara bearing yang rusak. Kerusakan bearing
yang tidak terlalu parah, tidak akan mengeluarkan suara yang keras,
sehingga diperlukan alat bantu stetoskop. Jika tidak punya stetoskop,
coba jalankan motor tanpa beban dengan tegangan listrik secara hati-hati
(awas bahaya putaran motor). lalu perhatikan suara motor kembali, panas
pada body motor, dan ampere motor yang tanpa beban ini. jika tidak ada
masalah di motor, lanjutkan pengecekan pada beban atau mesin.
5. Pengecekan beban ini, tidak bisa dijelaskan secara rinci karena
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
Jika pada beban impeller, apakah impellernya seimbang? perlu
diketahui, impeller yang tidak seimbang mengakibatkan motor
panas, bearing rusak dan arus meningkat.
Jika pada beban conveyor,apakah jalannya conveyor berat? apakah
conveyornya tidak macet,? Apa jalannya conveyor tidak terhambat
oleh suatu benda? apa bearing-bearing roll conveyor dalam kondisi
baik?
Jika pada beban pompa, apa pompa jalannya lancar dan tidak berat?
Apa kopling motor dengan pompa center? Dan lain sebagainya.
Pengecekan yang sama juga diperlukan pada beban-beban yang
lain. Perlu diingat, semakin berat beban untuk berputar, berarti
semakin besar daya yang dibutuhkan, Dan dengan daya yang
dibutuhkan semakin besar(P) dan dengan tegangan(V) dan faktor
daya(cos φ) yang tetap, maka ampere/arus listriklah(I) yang
meningkat. Ingat rumus daya aktif, P = V . I . cos φ. .
.
Contoh. Hitung daya motor induksi 3 phasa yang memiliki arus 9,5 A dengan
tegangan 380V dan faktor daya/ cos φ 0,88.
P = √3 .V. I . cos φ = 1,73 . 380 . 9,5 . 0,88 = 5495 watt atau dibulatkan jadi 5,5
KW. .
P output = √3 .V. I . eff . cos φ
Contoh. Hitung daya output motor jika diketahui seperti data diatas dengan
efisiensi motor 90 % .
P output = √3 .V. I . eff . cos φ = 1,73 . 380 . 9,5 . 0,9 . 0,88 = 4946 watt atau
MODUL PEMBEL
AJ
ARAN MO
T
OR SER
V
O
Contoh. Dengan daya input motor 5 KW dan daya output 4,5 KW. Hitung efisiensi
daya pada motor tersebut.
ᶯ = (Pout / P)x 100% = (4500/5000)x 100% = 90 %
. )
Pada motor 1 phasa
S (VA) = V . I
Pada motor 3 phasa
S = √3 . V . I
.
. .