BAB II
TINJAUAN PUSTAKA
2.1 Misalignment
Misalignment adalah ketidaklurusan antara kedua pulley. Misalignment
terjadi karena adanya pergeseran atau penyimpangan salah satu bagian mesin
dari garis pusatnya. Misalignment sendiri mengakibatkan getaran dalam arah
axial. Sedangkan, alignment adalah suatu pekerjaan yang meluruskan/
mensejajarkan dua sumbu poros lurus (antara poros penggerak dengan sumbu
poros yang digerakkan) pada waktu peralatan itu beroperasi. Tetapi dalam
kenyataan, pengertian lurus tidak bisa didapatkan 100%. Untuk itu harus
diberikan toleransi kurang dari 0,06 mm. Dalam proses alignment pada
kondisi mesin tidak beroperasi (dingin), hasilnya bisa saja akan berubah pada
saat mesin beroperasi (panas).
Macam –macam ketidaklurusan kedua poros (misalignment) [1]:
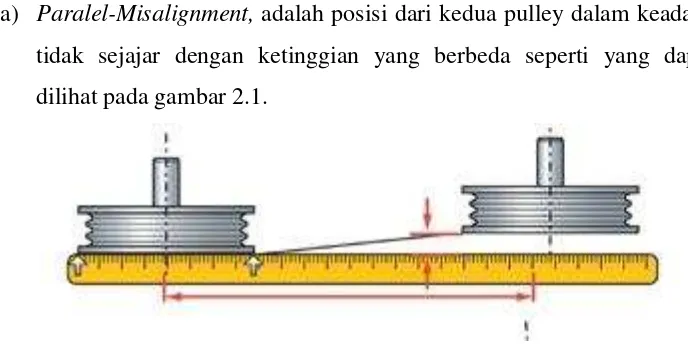
a) Paralel-Misalignment, adalah posisi dari kedua pulley dalam keadaan
tidak sejajar dengan ketinggian yang berbeda seperti yang dapat
dilihat pada gambar 2.1.
Gambar 2.1 Gambar Parallel-misalignment pulley
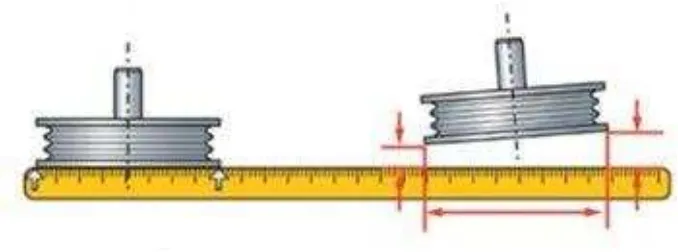
b) Angular-Misalignment, adalah ketidaklurusan kedua pulley yang
Gambar 2.2 Gambar Angular misalignment pulley
c) Twisted-Misalignment, adalah gabungan dari parallel dan angular
seperti yang dapat dilihat pada gambar 2.3.
Gambar 2.3 Gambar Twisted-misalignment pulley
d) Softfoot adalah suatu kondisi dimana mesin duduk pada landasan
dasar lantai, hal ini berarti sebuah kondisi yang kurang stabil, baik
karena sifat dasar pondasi lantai maupun material dudukannya. Proses
Leveling, pelurusan dan perataan (alignment) haruslah dilakukan
terlebih dahulu.
2.2Pulley
Puli merupakan tempat sabuk berputar, besarnya putaran yang
ditransmisikan sabuk tergantung pada diameter puli penggerak dan puli yang
digerakkan. Puli berfungsi untuk memindahkan daya dan putaran yang
dihasilkan motor diesel ke poros pertama, lalu memindahkannya ke poros
cor kelabu. Contoh pulley yang digunakan dapat dilihat pada gambar 2.4.
Jenis-jenis pulley dapat dibagi menjadi:
1. Sheaves / V-Pulley: Paling sering digunakan, pulley ini digerakkan
oleh V-Belt.
2. Variable Speed Pulley: digunakan untuk mengontrol kecepatan mesin.
3. Mi- Lock Pulley: digunakan pada pegas rem.
4. Timing Pulley: digunakan untuk aplikasi yang mempunyai kebutuhan
yang lebih spesifik.
Adapun beberapa tipe pulley yaitu:
1. Pulley tipe V
2. Pulley timming
3. Pulley Variable
4. Pulley round (alur U)
5. Loss pulley
Perbandingan putaran, dan diameter puli diperoleh dari :
n1.d1= n2.d2………..(2.1)
dimana :
n1 = Putaran puli penggerak [mm]
n2 = Putaran puli yang digerakkan [mm]
d1 = Diameter puli penggerak [mm]
d2 = Diameter puli yag digerakkan [mm]
2.3 Klasifikasi fan
Fan dapat diklasifikasikan dalam dua klasifikasi yaitu:
1. Fan Aksial berfungsi menggerakkan aliran udara sepanjang sumbu fan.
Cara kerja fan seperti impeler pesawat terbang: blades fan menghasilkan
pengangkatan aerodinamis yang menekan udara. Fan ini terkenal di
industri karena murah, bentuknya yang kompak dan ringan. Jenis utama
fan dengan aliran aksial (impeler, pipa aksial dan impeler aksial) [2] yang
dapat dilihat pada Gambar 2.5.
Gambar 2.5 Fan Aksial
Fan Aksial dapat dibagi menjadi 3 jenis yaitu :
a. Fan Propeller seperti terlihat pada gambar 2.6, Menghasilkan laju
aliran udara yang tinggi pada tekanan Rendah, tidak membutuhkan
saluran kerja yang luas (sebab tekanan yang dihasilkannya kecil),
murah sebab konstruksinya yang sederhana, mencapai efisiensi
maksimum, hampir seperti aliran yang mengalir sendiri dan sering
digunakan pada ventilasi atap, dapat menghasilkan aliran dengan arah
berlawanan, yang membantu dalam penggunaan ventilasi namun
efesiensi energinya relarif rendah dan sedikit berisik.
b. Fan pipa aksial seperti terlihat pada gambar 2.7 merupakan fan
yang menghasilkan tekanan lebih tinggi dan efesiensi operasinya lebih
baik daripada fan propeller, dapat dengan cepat dipercepat sampai ke
nilai kecepatan tertentu (karena putaran massanya rendah) dan
menghasilkan aliran pada arah berlawanan, yang berguna dalam
berbagai penggunaan ventilasi, menciptakan tekanan yang cukup untuk
mengatasi kehilangan di saluran dengan ruang yang relatif efisien,
yang berguna untuk pembuangan. Tetapi harga fan pipa aksial relatif
mahal, kebisingan aliran udara sedang dan efesiensi energinya reletif
rendah ( 65%).
Gambar 2.7 Fan Tabung Aksial
c. Fan dengan baling-baling seperti terlihat pada gambar 2.8
merupakan fan yang dapat dengan mudah dipercepat sampai ke
nilai kecepatan tertentu (disebabkan putaran massanya yang
rendah) dan menghasilkan aliran pada arah berlawanan yang
berguna dalam berbagai penggunaan ventilasi, cocok untuk
hubungan langsung ke as motor dan kebanyakan energinya efisien
( mencapai 85% jika dilengkapi dengan fan airfoil dan jarak ruang
yang kecil).
2. Fan Sentrifugal seperti pada gambar 2.9 meningkatkan kecepatan aliran udara
dengan impeler berputar. Kecepatan meningkat sampai mencapai ujung
blades dan kemudian diubah ke tekanan. Fan ini mampu menghasilkan
tekanan tinggi yang cocok untuk kondisi operasi yang kasar, seperti sistim
dengan suhu tinggi, aliran udara kotor atau lembab, dan handling bahan.
Gambar 2.9 Fan Sentrifugal
Fan sentrifugal dapat diklasifikasikan menjadi:
a. Fan radial dengan blade datar ( gambar 2.10) Rancangannya sederhana
sehingga dapat dipakai untuk unit penggunaan khusus, dapat beroperasi
pada aliran udara yang rendah tanpa masalah getaran, sangat tahan lama,
Efisiensinya mencapai 75%, Memiliki jarak ruang kerja yang lebih besar
yang berguna untuk handling padatan yang terbang (debu, serpih kayu,
dan skrap logam), namun penggunaannya hanya cocok untuk laju aliran
udara rendah sampai medium.
Gambar 2.10 Fan Sentrifugal dengan Blade Radial
b. Forward-Curved Fan (Fan yang melengkung ke depan) seperti terlihat
besar terhadap tekanan yang relatif rendah, ukuran fan relatif kecil, tingkat
kebisingannya rendah (disebabkan rendahnya kecepatan) dan sangat cocok
untuk digunakan untuk penyejuk udara dan ventilasi, namun fan ini Hanya
cocok untuk layanan penggunaan yang bersih, bukan untuk layanan kasar
dan bertekanan tinggi, keluaran fan sulit untuk diatur secara tepat,
penggerak harus dipilih secara hati-hati untuk menghindarkan beban motor
berlebih sebab kurva daya meningkat sejalan dengan aliran udara,
Efisiensi energinya relatif rendah (55-65%)
Gambar 2.11 Forward-Curved Fan
c. Backward inclined fan (gambar 2.12), merupakan fan yang dapat
beroperasi dengan perubahan tekanan statis (asalkan bebannya tidak
berlebih ke motor), Cocok untuk sistim yang tidak menentu pada aliran
udara tinggi, Cocok untuk layanan forced-draft, Fan dengan blade datar
lebih kuat, Fan dengan blades lengkung lebih efisien (melebihi 85%), Fan
dengan blades air-foil yang tipis adalah yang paling efisien. Namun fan ini
memiliki sejumlah kekurangan seperti Tidak cocok untuk aliran udara
yang kotor (karena bentuk fan mendukung terjadinya penumpukan debu),
Fan dengan blades air-foil kurang stabil karena mengandalkan pada
pengangkatan yang dihasilkan oleh tiap blade dan Fan blades air-foil yang
tipis akan menjadi sasaran erosi.
2.4 Sistem Transmisi Centifugal Fan (V-belt)
Jarak yang cukup jauh yang memisahkan antara dua buah poros
mengakibatkan tidak memungkinkannya mengunakan transmisi langsung
dengan roda gigi. Sabuk-V merupakan sebuah solusi yang dapat digunakan.
Sabuk-V adalah salah satu transmisi penghubung yang terbuat dari karet dan
mempunyai penampang trapesium. Bagian sabuk yang membelit pada pulli
akan mengalami lengkungan sehingga lebar bagian dalamnya akan
bertambah besar (Sularso, 1991:163)
Sebagian besar transmisi sabuk menggunakan sabuk-V karena mudah
penanganannya dan murah harganya. Selain itu sabuk-V juga memiliki
keungulan lain dimana sabuk-V akan menghasilhan transmisi daya yang
besar pada tegangan yang relatif rendah serta jika dibandingkan dengan
transmisi roda gigi dan rantai, sabuk-V bekerja lebih halus dan tak bersuara.
Sabuk-V selain juga memiliki keungulan dibandingkan dengan
transmisi-transmisi yang lain, sabuk-V juga memiliki kelemahan dimana sabuk-V dapat
memungkinkan untuk terjadinya slip.
Secara umum, sabuk dapat diklasifikasikan menjadi 3 jenis [3] yaitu:
Sabuk rata (flat belt)
Sabuk rata (flat belt) dipasang pada puli silinder dan meneruskan momen
antara dua poros yang jaraknya dapat mencapai 10 meter dengan
perbandingan putaran antara 1:1 sampai dengan 6:1.
Sabuk dengan penampang trapesium (v-belt) dipasang pada puli dengan
alur dan meneruskan momen antara dua poros yang jaraknya dapat
mencapai 5 meter dengan perbandingan putaran antara 1:1 sampai dengan
7:1.
Sabuk dengan gigi (timing belt) yang digerakkan dengan sproket pada
jarak pusat sampai 2 meter, dan meneruskan putaran secara tepat dengan
perbandingan antara 1:1 sampai 6:1.
Kecepatan sabuk pada umumnya direncanakan antara 10 – 20 m/s, serta dapat mentransmisikan daya hingga 500 kW. Sabuk-V terbuat dari
semacamnya dipergunakan sebagai inti sabuk untuk membawa tegangan
yang besar, hal ini dapat dilihat pada Gambar 2.13 ((Sularso, 1991:164)
Gambar 2.13 Penampang sabuk-V klasik
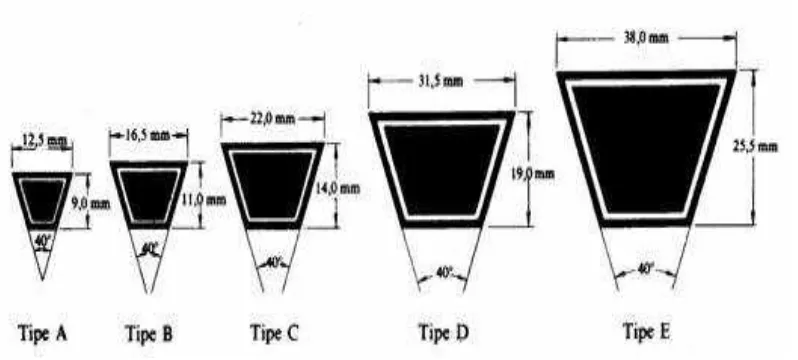
2.5Tipe Dan Ukuran Nominal Sabuk-V
Dalam gambar 2.14 diberikan berbagai proporsi penampang sabuk-V
yang umum dipakai yang merupakan tipe standart ditandai dengan huruf A, B,
C, D dan E.
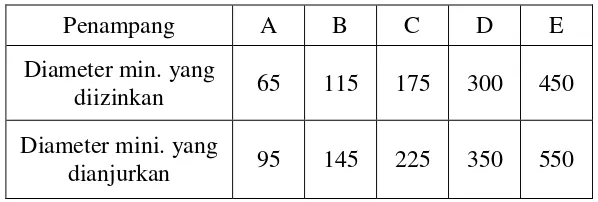
2.6Alur V pada pulley
Table 2.1 Diameter minimum puli yang diizinkan dan dianjurkan (mm)
Penampang A B C D E
dengan hati-hati pada mesin perkakas, kebenaran bentuk serta ukuran dari
alur V serta ukuran diameter lubang harus tepat. untuk pulle yang
menggunakan alur V lebih dari satu maka alur-alur tersebut harus seragam
sehingga masing-masing sabuk akan bekerja secara merata.Kesalahan bentuk
dari alur V pada pulley akan mengakibatkan penurunan umur pakai dari
sabuk itu sendiri serta akan mereduksi daya yang akan ditransmisikan. Pada
tabel 2.1 ( Sularso, 1991:169) terdapat diameter pulli berdasarka tipe
sabuk-V.
2.7Analisa Getaran
Getaran secara teknik didefinisikan sebagai gerak osilasi dari suatu objek
terhadap posisi awalnya.
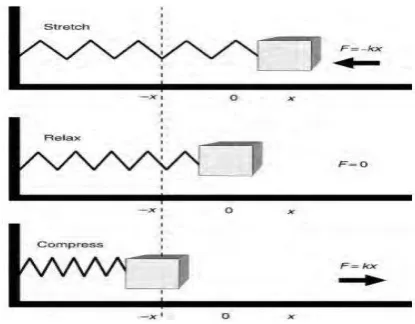
Semua mesin memiliki tiga sifat fundamental yang berhubungan untuk
menentukan bagaimana mesin akan bereaksi terhadap kekuatan-kekuatan yang
menyebabkan getaran-getaran, seperti sistem pegas-massa [12], yaitu :
1. Massa (m)
Merupakan inersia untuk tetap dalam keadaan semula atau gerak. Sebuah
gaya mencoba untuk membawa perubahan dalam keadaan istirahat atau
gerak, yang ditentang oleh massa dan satuannya dalam kg.
2. Kekakuan atau stiffnes (k)
Ada kekakuan tertentu yang dipersyaratkan membengkokkan atau
diperlukan untuk memperoleh defleksi tertentu disebut kekakuan, satuan
dalam N/m.
3. Damping atau redaman (c)
Setelah memaksa set bagian atau struktur ke dalam gerakan, bagian atau
struktur akan memiliki mekanisme inheren untuk memperlamabat gerak
(kecepatan). Karakteristik ini untuk mengurangi kecepatan gerak disebut
redaman, satuannya dalam N/(m/s).
Lihat Gambar 2.15 dengan menerapkan kekuatan untuk massa, massa
bergerak ke kiri, menekan pegas semi. Ketika massa dilepaskan, bergerak kembali
ke posisi netral dan kemudian perjalanan kanan lanjut sampai ketegangan pegas
berhenti massa. Massa kemudian berbalik dan mulai melakukan perjalanan ke kiri
lagi. Ini lagi melintasi posisi netral dan mencapai batas kiri. Gerakan ini secara
teoritis dapat terus tanpa henti jika tidak ada redaman dalam sistem dan tidak ada
efek eksternal (seperti gesekan). Gerakan ini disebut getaran[12].
Gambar 2.15 Konsep dasar getaran
2.7.1 Karakteristik Getaran
Getaran mesinadalah gerakan suatu bagian mesin maju dan
mundur (bolak-balik) dari keadaan diam/netral. Kondisi suatu mesin dan
masalah-masalah mekanik yang terjadi dapat diketahui dengan mengukur
karakteristik getaran pada mesin tersebut. Karakteristik- karakteristik
Frekuensi Getaran
Perpindahan Getaran. (Vibration Displacement)
Kecepatan Getaran (Vibration Velocity)
Percepatan Getaran (Vibration Acceleration)
Dengan mengacu pada gerakan pegas, kita dapat mempelajari karakteristik
suatu getaran dengan memetakan gerakan dari pegas tersebut terhadap fungsi
waktu.
2.7.2 Parameter Pengukuran
Kondisi suatu mesin dan masalah-masalah mekanik yang terjadi dapat
diketahui dengan mengukur karakteristik getaran pada mesin tersebut.
Karakteristik getaran yang penting antara lain:
1. Frekuensi adalah karakteristik dasar yang digunakan untuk
mengukur dan menggambarkan getaran.
2. Perpindahan mengindikasikan berapa jauh suatu objek bergetar.
3. Kecepatan mengindikasikan berapa cepat obek bergetar.
4. Percepatan mengindikasikan suatu objek bergetr terkait dengan gaya
penyebab getaran.
5. Phase mengindikasikan bagaimana suatu bagian bergetar relatif
terhadap bagian yang lain, atau untuk menentukan posisi suatu
bagian yang bergetar pada suatu saat, terhadap suatu referensi atau
terhadap bagian lain yang bergettar dengan frekuensi yang sama.
Gerakan massa dari posisi netral, untuk batas atas perjalanan, kembali
melalui posisi netral, untuk batas bawah perjalanan dan kembali ke posisi
netral, merupakan satu siklus gerak. Ini satu siklus gerak berisi semua
informasi yang diperlukan untuk mengukur getaran dari sistem ini. Gerak
terus massa hanya akan mengulangi siklus yang sama [12].
Gerakan ini disebut periodik dan harmonis, dan hubungan antara
perpindahan massa dan waktu dinyatakan dalam bentuk persamaan
sinusoidal:
dimana
A = Amplitudo
ω = 2.π.f
f = frequensi
t = detik
Sebagai massa perjalanan naik dan turun, kecepatan perubahan wisata dari
nol sampai maksimum. Velocity dapat diperoleh dengan waktu membedakan
persamaan perpindahan:
... (2.3)
Demikian pula, percepatan massa juga bervariasi dan dapat diperoleh
dengan membedakan persamaan kecepatan:
... (2.4)
Dalam Gambar 2.7 perpindahan ditampilkan sebagai kurva sinus;
kecepatan, sebagai kurva cosinus; percepatan lagi diwakili oleh kurva sinus.
Gambar 2.16 Sifat-sifat gelombang
Sifat-sifatnya terdiri dari
a) Gelombang Fundamental
c) Panang Gelombng
Getaran dari sebuah mesin merupakan resultan dari sejumlah getaran
individu komponen yang muncul oleh gerak ataupun gaya pada komponen
mekanikal ataupun proses pada mesin ataupun sistem yang saling
terkait.Setiap komponen individu yang bergetar ini memiliki gerak
periodik. Gerakan akan berulang pada periode waktu tertentu. Interval atau
selang waktu τ, dimana getaran berulang biasanya diukur dalam satuan
waktu yaitu detik.
Gerak harmonik merupakan gerak sebuah benda dimana grafik posisi
partikel sebagai fungsi waktu berupa sinus (dapat dinyatakan dalam
bentuk sinus atau kosinus). Gerak semacam ini disebut gerak
osilasi atau getaran harmonik. Gerak osilasi dapat berulang secara teratur.
Jika gerak itu berulang dalam selang waktu yang sama, maka geraknya
disebut gerak periodik. Waktu pengulangan τ disebut dengan periode
osilasi dan kebalikannya, f = 1/τ disebut frekuensi. Jika gerak dinyatakan
dalam fungsi waktu x(t), maka setiap gerak periodik harus memenuhi
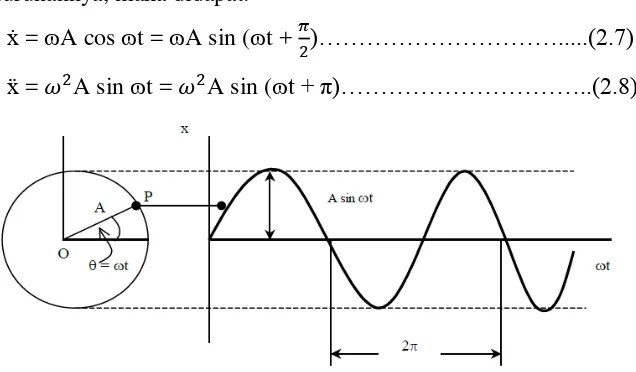
harmonik sering dinyatakan sebagai proyeksi suatu titik yang bergerak
melingkar dengan kecepatan tetap pada suatu garis lurus, seperti terlihat
pada gambar 2.16. Dengan kecepatan sudut garis OP sebesar ω,
perpindahan simpangan x dapat dituliskan sebagai:
Besaran ω biasanya diukur dalam radian per detik dan disebut frekuensi
lingkaran. Oleh karena gerak berulang dalam 2π radian, maka didapat hubungan:
ɷ = = 2πf……….(2.6)
dengan τ dan f adalah periode dan frekuensi gerak harmonik bertuturt-turut dan biasanya diukur dalam detik dan siklus perdetik. Kecepatan dan
percepatan gerak harmonik dapat diperoleh secara mudah dengan
diferensiasi simpangan gerak harmonik. Dengan menggunakan notasi titik
untuk turunannya, maka didapat:
ẋ = ɷA cos ɷt = ɷA sin (ɷt + )………...(2.7)
ẍ = A sin ɷt = A sin (ɷt + π)………..(2.8)
Gambar 2.17 Gerak Harmonik Sebagai Proyeksi Suatu Titik Yang Bergerak
Pada Lingkaran
2.7.4 Gerak Periodik
Gerak yang berulang dalam selang waktu yang sama disebut gerak
periodik. Gerak periodik ini selalu dapat dinyatakan dalam fungsi sinus
atau conisus, oleh sebab itu gerak periodik disebut gerak harmonik. Jika
gerak yang periodik ini bergerak bolak-balik melalui lintasan yang sama
disebut getaran atau osilasi. Getaran mesin pada umumnya memiliki
beberapa frekuensi yang muncul bersama-sama. Gerak periodik dapat
dihasilkan oleh getaran bebas system dengan banyak derajat kebebasan,
semacam ini menghasilkan bentuk gelombang kompleks yang diulang
secara periodik seperti pada gambar 2.18.
Gelombang pertama yang harus kita amati adalah gelombang (1).
Hal ini diwakili oleh satu siklus. Sebagai skala waktu adalah 1 s, ia
memiliki frekuensi 1 Hz.
Gelombang berikutnya untuk dipertimbangkan adalah gelombang
(3). Hal ini dapat dilihat bahwa ia memiliki tiga siklus pada periode
yang sama dari gelombang pertama. Jadi, ia memiliki frekuensi 3
Hz.
Ketiga adalah gelombang (7). Ia memiliki tujuh siklus dan karena
itu frekuensinya 7 Hz.
Gelombang (9) adalah berikutnya dengan Sembilan siklus dan akan
memiliki frekuensi 9 Hz.
Jika x (t) adalah fungsi periodik dengan periode , maka fungsi ini dapat
dinyatakan oleh deret Fourier [9] sebagai:
x(t) =
…………...(2.9)
Dengan
Gambar 2.18 Gerak periodik gelombang sinyal segiempat dan
Gelombang pembentuknya dalam domain waktu
Pada gelombang segiempat berlaku x(t) = ± X pada t =0, dan t =τ, dan seterusnya. Deret ini menunjukkan nilai rata-rata dari fungsi yang diskontinu.
dengan cosωt dan sin ωt , kemudian setiap suku diintegrasi untuk lama perioda
τ . Dengan mengingat hubungan berikut,
=
= ………...(2.10)
=
Dari persamaan (2.10), maka untuk m = n, diperoleh hasil
=
………(2.11)
=
………(2.12)
Persamaan deret Fourier berdasarkan nilai gelombang empat persegi:
x(t) = X untuk 0 < t < τ/2
dan
x(t) = −X untuk τ/2 < t < τ
Maka koefisien dan dapat dihitung, sebagai berikut:
=
bilangan ganjil. Sehingga deret Fourier untuk gelombang empat persegi
menjadi :
2.7.5Getaran Bebas (Free Vibration)
Getaran bebas terjadi jika sistem berosilasi karena bekerjanya gaya yang
ada dalam sistem itu sendiri (inherent) dan apabila tidak ada gaya luar yang
bekerja. Sistem yang bergetar bebas akan bergetar pada satu atau lebih
frekuensi naturalnya yang merupakan sifat dinamika yang dibentuk oleh
distribusi massa dan kekakuannya.
Perhatikan gerak dari sebuah elemen yang ditempatkan pada sebuah
pegas seperti diillustrasikan dalam gambar 2.19 yang menunjukkan sebuah
jarak kecil x dari posisi kesetimbangannya. Persamaan diferensial
menjabarkan perpindahan elemen setelah dilepaskan yang diperoleh dengan
penjumlahan gaya dalam arah vertikal. Aljabar penjumlahan ΣF dengan gaya
ke atas (+) adalah:
Gambar 2.19 Sistem Massa Pegas dan diagram benda bebas
Hukum Newton kedua adalah dasar pertama untuk meneliti gerak system
seperti ditunjukkan pada gambar 2.17 dimana gaya statik ∆ dan gaya pegas k∆
adalah sama dengan gaya berat w yang bekerja pada massa m:
Gerak statik: k ∆ = W = m.g ………(2.14)
k ∆ - W = 0
dimana menghasilkan persamaan diferensial untuk gerak, karena k ∆= W dan menggunakan ẍ = a yang merupakan turunan kedua dari x terhadap waktu [10].
mẍ+ kx = 0 ………(2.16) Persamaan 2.16 merupakan persamaan gerak getar bebas tanpa peredaman,
selanjutnya diubah menjadi:
ẍ + = 0,
ω
n=
………..(2.17
)
Solusi dari persamaan (2.17) :
x = Aest ẋ = sAest
ẍ = s2Aest …... (2.18)
Substitusi (2.18) ke (2.17)
est (s2 + 0) s1 = iωn
s2 = -iωn
Sehingga:
x
= A1es1t + A2es2t = A1eiωnt + A2e–iωnt ………(2.19)Ingat:
e
iq = cos q + i sin qe
–iq = cos q - i sin qPersamaan (2.19) menjadi
x = A1 (cos ωnt + isin ωnt) + A2 (cos ωnt - isin ωnt)
= (A1 + A2) cos ωnt + i(A1 - A2) sin ωnt
= A cos ωnt + B cos ωnt……….(2.20)
Kondisi pada t=0, x(0)=X0 sedangkan v(0)=V0
x = A cos ωnt + B cos ωnt
v = ẋ = -ωnA cos ωnt + ωnB cos ωnt
pada t = 0
A =
x =
sin ωn
tx = Asin ωnt
Persamaan ini merupakan persamaan diferensial linier dimana solusinya dapat
ditemukan sebagai berikut.
x = Asin ɷt………..(2.21)
ẍ = sin ɷt………. (2.22) substitusi persamaan (2.16) dan (2.25) sehingga:
m ( sin ɷt) + k (A sin ɷt) = 0………....(2.23) (k ) (A sin ɷt) = 0
(A sin ɷt) ≠ 0 (k ) = 0
2.8 Standarisasi Pengukuran Getaran
Standar Indicator yang digunakan untuk pengukuran getaran
dalam penelitian ini adalah ISO 10186-1:1995(E). Standard ini dapat
digunakan untuk menentukan tingkat getaran yang dapat diterima bagi
berbagai kelas permesinan. Dengan demikian, untuk menggunakan standard
ini, pertama-tama perlu mengklasifikasikan permesinan yang akan diuji sesuai
Tabel 2.4 yang menunjukkan pedoman bagi kelayakan permesinan ISO
Tabel 2.4 Kriteria zona evaluasi kelayakan permesinan ISO 10186-1:1995(E)
Dengan membaca Tabel 2.4 dapat mengkaitkan kondisi kerusakan
permesinan dengan getaran sebagai monitoring perawatan berbasis kondisi.
Standar yang digunakan adalah parameter kecepatan (rms) untuk
mengindikasikan kerusakan. Zona Good, satisfactory, unsatisfactory dan
unacceptable seperti terlihat pada Tabel 2.4. mengklasifikasikan tingkat
keparahan sesuai dengan kelas permesinan, sebagai berikut:
1. Zona Good
Zona hijau, getaran dari mesin sangat baik dan dibawah getaran yang
diizinkan.
2. Zona Satisfactory
Zona abu-abu, getaran dari mesin baik dan dapat dioperasikan karena masih
dalam batas yang diizinkan.
3. Zona Unsatisfactory
Zona merah muda, getaran dari mesin dalam batas toleransi dan hanya
dioperasikan dalam waktu terbatas.
4. Zona Unacceptable
Zona merah, getaran dari mesin dalam batas berbahaya dan kerusakan dapat
5. Kelas I
Bagian mesin secara integral dikaitkan sebagai permesinan lengkap dalam
kondisi pengoperasian normal (motor listrik sampai 15 kW).
6. Kelas II
Peralatan permesinan berukuran sedang (motor listrik dengan output 15-75
kW) tanpa fondasi khusus, mesin terpasang mati (hingga 300 kW) dengan
fondasi khusus.
7. Kelas III
Mesin dengan penggerak utama yang lebih besar dan mesin-mesin besar
lainnya dengan rotating masses terpasang mati pada fondasi padat dan fondasi
berat yang indikatornya sulit bagi penjalaran getaran.
8. Kelas IV
Mesin dengan penggerak utama yang lebih besar dan mesin-mesin besar
lainnya dengan rotating masses-terpasang pada fondasi yang indikatornya
mudah bagi pengukuran getaran (sebagai contoh: turbo generator terutama