PENGENDALI KECEPATAN MOTOR DC
PADA MOBIL LISTRIK
TUGAS AKHIR
Oleh :
FIRMANTO
NIM : 3211001055
Disusun untuk memenuhi salah satu syarat kelulusan Program Diploma
III
Program Studi Teknik Elektronika
Politeknik Negeri Batam
PROGRAM STUDI TEKNIK ELEKTRONIKA
POLITEKNIK NEGERI BATAM
PENGENDALI KECEPATAN MOTOR DC PADA MOBIL LISTRIK
Nama
: Firmanto
NIM
: 3211001055
Pembimbing I : Ridwan S.ST.
Pembimbing II : Didi Istardi M.Sc.
:
firmanfia92@yahoo.com
ABSTRAK
Sistem pengendalian kecepatan motor memiliki berbagai logika dan metode
pengendalian. Salah satu yang sering digunakan dalam pengendalian kecepatan motor
adalah kendali logika PID. Kendali logika PID adalah gabungan dari sistem kendali
proporsional, integral, dan derivative yang masing
–
masing sistem ini memiliki
keunggulan
–
keunggulan tertentu dimana sistem kendali proporsional memiliki
keunggulan rise time yang cepat, sistem kendali integral memiliki keunggulan untuk
mempekecil error, dan sistem derivative memiliki keunggulan memperkecil error dan
meredam overshot.
Untuk mengetahui berapa kecepatan motor yang dihasilkan dapat menggunakan
rotary enkoder yang dipasang pada motor. Masukan enkoder berupa sinyal pulsa yang
diubah kedalam bentuk RPM.
Pengendali kecepatan motor DC pada mobil listrik dapat menerapkan kendali PID
yang dapat digunakan untuk mengendalikan kecepatan motor dengan stabil. Dengan
mengatur setpoint yang kita inginkan kecepatan motor dapat diatur sesuai keinginan karena
data setpoint diaolah dengan Mikrokontroller dan data berupa sinyal PWM.
MOTOR DC SPEED CONTROL SYSTEM IN ELECTRIC CAR
Student Name : Firmanto
NIM
: 3211001055
Supervisor I
: Ridwan S.ST.
Supervisor II : Didi Istardi M.Sc.
:
firmanfia92@yahoo.com
ABSTRACT
Motor speed control systems have a different logic and control methods. One of the
frequently used in motor speed control is the control logic of the PID. The control logic
PID control system is a combination of proportional, integral, and derivative that each
system has its advantages
–
specific advantages which the proportional control system has
the advantage of a rapid rise time, integral control system has advantage for reduce error,
and the system of derivatives has the advantage of reducing errors and dampen overshot.
To find out how the speed of the motor can be generated using the rotary encoder is
mounted on the motor. The input signal is a pulse encoder which is converted into a form
of RPM.
DC motor speed controller in electric car can apply a PID control; can be used to
control the motor speed with stable. By setting the set point, speed motor that we want can
be set as you wish because data set point is arranged with Microccontrollers and the data in
the form of PWM signals.
i
PERNYATAAN KEASLIAN TUGAS AKHIR
Saya yang bertandatangan dibawah ini menyatakan bahwa isi sebagian maupun
keseluruhan Tugas Akhir saya yang berjudul :” Pengendali Kecepatan Motor DC pada
Mobil Listrik” adalah hasil karya sendiri, diselesaikan tanpa menggunakan bahan-bahan
yang tidak diijinkan dan bukan merupakan karya pihak lain yang saya akui sebagai karya
sendiri.
Semua referensi yang dikutip atau dirujuk telah ditulis secara lengkap pada daftar
pustaka.
Apabila ternyata pertanyaan saya ini tidak benar, saya bersedia menerima sanksi
sesuai peraturan yang berlaku.
Batam, 26 Mei 2014
Firmanto
3211001055
KATA PENGANTAR
Segala puji bagi ALLAH SWT. Atas segala rahmat, nikmat, dan hidayah yang telah
dilimpahkan kepada penulis, sehingga penulis dapat menyelesaikan tugas akhir ini dengan
judul
“Pengendali Kecepatan Motor DC Pada Mobil Listrik”
. Shalawat dan salam
senantiasa terlimpahkan kepada Nabi Muhammad SAW, karena beliaulah yang menuntun
kita hingga sampai pada zaman serba modern ini.
Atas segala bimbingan, do’a, petunjuk, dan saran –
saran yang telah diberikan selama ini
sehingga tugas akhir ini dapat disusun dengan baik, maka pada kesempatan ini penulis
mengucapkan terimaksih yang sebesar-besarnya kepada :
1. Orang tua tercinta yang selama ini telah memberikan dukungan moral,
materi, waktu, dan do’a sehingga penulis dapat menyelesaikan tugas akhir
ini.
2. Abang, kakak, dan adikku tercinta yang selalu memotivasi dan semangat
sehingga penulis dapat menyelesaikan tugas akhir ini.
3. Ridwan S.ST. selaku pembimbing I yang dengan sabar dalam membimbing
dan memberikan pencerahan kepada penulis.
4. Didi Istardi M.Sc. selaku pembimbing II yang dengan sabar dalam
membimbing dan memberikan pencerahan kepada penulis.
5. Seluruh Dosen Jurusan Teknik Elektro yang telah banyak memberikan ilmu
selama belajar maupun menyelesaikan tugas akhir ini.
6. Ucapan spesial untuk pacar saya Nadira a
tas do’a, dukungan dan semangat
selama pembuatan tugas akhir ini.
7. Teman
–
teman Teknik Elektronika 2010 dan 2011 yang telah memberikan
dukungan, bantuan serta kerjasamanya selama ini.
8. Semua pihak yang telah banyak membantu dalam penyelesaian tugas akhir
ini.
Penulis menyadari sepenuhnya bahwa dalam penyusunan tugas akhir ini masih banyak
kekurangan serta belum sempurna. Oleh karena itu, saran dan kritik yang membangun dari
semua pihak sangat diharapakan demi kesempurnaan tugas akhir ini.
i
PERNYATAAN KEASLIAN TUGAS AKHIR
Saya yang bertanda tangan dibawah ini menyatakan bahwa isi sebagian maupun
keseluruhan Tugas Akhir saya yang berjudul:
”
Pengendali Kecepatan Motor DC pada
Mobil Listrik” adalah hasil karya sendiri,
diselesaikan tanpa menggunakan bahan-bahan
yang tidak diizinkan dan bukan merupakan karya pihak lain yang saya akui sebagai karya
sendiri.
Semua referensi yang dikutip atau dirujuk telah ditulis secara lengkap pada daftar
pustaka.
Apabila ternyata pernyataan saya ini tidak benar, saya bersedia menerima sanksi
sesuai peraturan yang berlaku.
Batam, 6 Juni 2014
Firmanto
3211001055
LEMBAR PENGESAHAN TUGAS AKHIR
Tugas Akhir disusun untuk memenuhi salah satu syarat memperoleh gelar
Ahli Madya (A. Md.)
di
Politeknik Negeri Batam
Oleh
Firmanto
3211001055
Batam, 6 Juni 2014
Disetujui oleh :
Dosen Penguji :
Dosen Pembimbing :
1. Prasaja Wikanta, M.Sc.
NIK:103026
1. Ridwan, S.ST.
NIK:113113
2. Hasnira,S.ST.
NIK:113112
2. Didi Istardi, M.Sc.
NIK:102022
iii
PENGENDALI KECEPATAN MOTOR DC PADA MOBIL LISTRIK
Nama
: Firmanto
NIM
: 3211001055
Pembimbing I : Ridwan S.ST.
Pembimbing II : Didi Istardi M.Sc.
:
firmanfia92@yahoo.com
ABSTRAK
Sistem pengendalian kecepatan motor memiliki berbagai logika dan metode
pengendalian. Salah satu yang sering digunakan dalam pengendalian kecepatan motor
adalah kendali logika PID. Kendali logika PID adalah gabungan dari sistem kendali
proporsional, integral, dan derivative yang masing
–
masing sistem ini memiliki
keunggulan
–
keunggulan tertentu dimana sistem kendali proporsional memiliki
keunggulan rise time yang cepat, sistem kendali integral memiliki keunggulan untuk
mempekecil error, dan sistem derivative memiliki keunggulan memperkecil error dan
meredam overshot.
Untuk mengetahui berapa kecepatan motor yang dihasilkan dapat menggunakan
rotary enkoder yang dipasang pada motor. Masukan enkoder berupa sinyal pulsa yang
diubah kedalam bentuk RPM.
Pengendali kecepatan motor DC pada mobil listrik dapat menerapkan kendali PID
yang dapat digunakan untuk mengendalikan kecepatan motor dengan stabil. Dengan
mengatur setpoint yang kita inginkan kecepatan motor dapat diatur sesuai keinginan karena
data setpoint diaolah dengan Mikrokontroller dan data berupa sinyal PWM.
MOTOR DC SPEED CONTROL SYSTEM IN ELECTRIC CAR
Student Name : Firmanto
NIM
: 3211001055
Supervisor I
: Ridwan S.ST.
Supervisor II : Didi Istardi M.Sc.
:
firmanfia92@yahoo.com
ABSTRACT
Motor speed control systems have a different logic and control methods. One of the
frequently used in motor speed control is the control logic of the PID. The control logic
PID control system is a combination of proportional, integral, and derivative that each
system has its advantages
–
specific advantages which the proportional control system has
the advantage of a rapid rise time, integral control system has advantage for reduce error,
and the system of derivatives has the advantage of reducing errors and dampen overshot.
To find out how the speed of the motor can be generated using the rotary encoder is
mounted on the motor. The input signal is a pulse encoder which is converted into a form
of RPM.
DC motor speed controller in electric car can apply a PID control; can be used to
control the motor speed with stable. By setting the set point, speed motor that we want can
be set as you wish because data set point is arranged with Microccontrollers and the data in
the form of PWM signals.
v
KATA PENGANTAR
Segala puji bagi ALLAH SWT. Atas segala rahmat, nikmat, dan hidayah yang telah
dilimpahkan kepada penulis, sehingga penulis dapat menyelesaikan tugas akhir ini dengan
judul
“Pengendali Kecepatan Motor DC Pada Mobil Listrik”
. Shalawat dan salam
senantiasa terlimpahkan kepada Nabi Muhammad SAW, karena beliaulah yang menuntun
kita hingga sampai pada zaman serba modern ini.
Atas segala bimbingan, do’a, petunjuk, dan saran –
saran yang telah diberikan selama ini
sehingga tugas akhir ini dapat disusun dengan baik, maka pada kesempatan ini penulis
mengucapkan terimaksih yang sebesar-besarnya kepada :
1. Orang tua tercinta yang selama ini telah memberikan dukungan moral,
materi, waktu, dan do’a sehingga penulis dapat menyelesaikan tugas akhir
ini.
2. Abang, kakak, dan adikku tercinta yang selalu memotivasi dan semangat
sehingga penulis dapat menyelesaikan tugas akhir ini.
3. Ridwan S.ST. selaku pembimbing I yang dengan sabar dalam membimbing
dan memberikan pencerahan kepada penulis.
4. Didi Istardi M.Sc. selaku pembimbing II yang dengan sabar dalam
membimbing dan memberikan pencerahan kepada penulis.
5. Seluruh Dosen Jurusan Teknik Elektro yang telah banyak memberikan ilmu
selama belajar maupun menyelesaikan tugas akhir ini.
6.
Ucapan spesial untuk pacar saya Nadira atas do’a, dukun
gan dan semangat
selama pembuatan tugas akhir ini.
7. Teman
–
teman Teknik Elektronika 2010 dan 2011 yang telah memberikan
dukungan, bantuan serta kerjasamanya selama ini.
8. Semua pihak yang telah banyak membantu dalam penyelesaian tugas akhir
ini.
Penulis menyadari sepenuhnya bahwa dalam penyusunan tugas akhir ini masih banyak
kekurangan serta belum sempurna. Oleh karena itu, saran dan kritik yang membangun dari
semua pihak sangat diharapakan demi kesempurnaan tugas akhir ini.
DAFTAR ISI
PERNYATAAN KEASLIAN TUGAS AKHIR... i
LEMBAR PENGESAHAN TUGAS AKHIR...ii
ABSTRAK...iii
ABSTRACT...iv
KATA PENGANTAR...v
DAFTAR ISI...vi
DAFTAR GAMBAR...viii
DAFTAR TABEL...x BAB I... 1 PENDAHULUAN... 1 1.1Latar Belakang... 1 1.2 Rumusan Masalah... 1 1.3 Batasan Masalah... 1
1.4 Tujuan dan Manfaat... 2
1.5 Metodologi... 2
1.6 Sistematika Penulisan... 2
BAB II... 4
DASAR TEORI... 4
2.1 Kendali Proporsional Integral Derivative (PID)... 4
2.1.1 Sistem Kendali PID... 4
2.1.1 Kendali Proportional... 5 2.1.2 Kendali Integral... 6 2.1.3 Kendali Derivative... 7 2.2 Mikrokontroller Arduino... 8 2.3 PWM... 9 2.3.1 Konsep Dasar PWM... 9 2.4 Enkoder... 10 2.5 LCD Display... 11
vii
BAB III... 12
Perancangan Sistem... 12
3.1 Perancangan Penelitian dan Tahap-tahap Penelitian... 12
3.2 Perancangan Model... 12
3.2.1 Perancangan Perangkat Keras (Hardware)... 12
3.2.2 Rangkaian Sistem Minimum Mikrokontroller AT MEGA 328... 13
3.2.3 Perancangan Rangkaian Enkoder... 13
3.2.4 Perancangan LCD... 14
3.2.5 Perancangan Perangkat Motor... 14
3.2.6 Perancangan Perangkat Driver Motor... 15
3.3 Perancangan Perangkat Lunak... 16
3.4 Instrument Penelitian... 17
3.5 Prosedur Pelaksanaan Pengujian... 18
3.5.1Pengujian Sensor Enkoder... 18
3.5.2 Pengujian Motor dengan Input PWM Tetap... 18
3.5.3 Pengujian Motor Tanpa Beban... 19
3.5.4 Pengujian Motor dengan Beban... 19
3.6 Cara Pengolahan dan Analisa Data... 19
BAB IV... 20
Pengujian dan Analisa... 20
4.1 Hasil Pengujian... 20
4.1.1 Data Pengujian Motor Tanpa Beban... 20
4.1.2 Data Pengujian Motor Dengan Beban... 27
BAB V... 34
Kesimpulan dan Saran... 34
5.1 Kesimpulan... 34
5.2 Saran... 34
DAFTAR PUSTAKA... 35
LAMPIRAN... 36
DAFTAR GAMBAR
Gambar 2.1 Blok Diagram PID... 4
Gambar 2.2 Diagram Blok Close Loop... 5
Gambar 2.3 Blok Diagram Proportional... 6
Gambar 2.4 Blok Diagram Integral... 7
Gambar 2.5 Blok Diagram Derivative... 7
Gambar 2.6 Board Arduino ATmega 328... 8
Gambar 2.7 Pulsa PWM... 9
Gambar 2.8 Enkoder... 10
Gambar 3.1 Blok diagram perangkat keras... 13
Gambar 3.2 Perancangan Mikrokontroller... 13
Gambar 3.3 Rancangan Sensor Enkoder... 14
Gambar 3.4 Rancangan Tampilan LCD... 14
Gambar 3.5 Perancangan Perangkat Motor... 14
Gambar 3.6 Skematik Driver Motor... 15
Gambar 3.7 Flowchart PID Pada Mikrokontroller... 17
Gambar 3.8 Tampilan Hasil Pengujian Pembacaan Kecepatan Dengan Tachometer... 18
Gambar 4.1 Grafik Setpoint 100... 20
Gambar 4.2 Grafik Setpoint 200... 21
Gambar 4.3 Grafik Setpoint 300... 21
Gambar 4.4 Grafik Setpoint 400... 22
Gambar 4.5 Grafik Setpoint 500... 23
Gambar 4.6 Grafik Setpoint 600... 23
Gambar 4.7 Grafik Setpoint 700... 24
Gambar 4.8 Grafik Setpoint 800... 25
Gambar 4.9 Grafik Setpoint 900... 25
Gambar 4.10 Grafik Setpoint 1000... 26
Gambar 4.11 Grafik Setpoint 1100... 27
Gambar 4.12 Cara Pengambilan Data Kecepatan Menggunakan Tachometer... 27
Gambar 4.13 Grafik Setpoint 100... 28
Gambar 4.14 Grafik Setpoint 200... 28
Gambar 4.15 Grafik Setpoint 300... 29
ix
Gambar 4.17 Grafik Setpoint 500... 30
Gambar 4.18 Grafik Setpoint 600... 31
Gambar 4.19 Grafik Setpoint 700... 32
DAFTAR TABEL
Tabel 2.1 Tabel fungsi pin LCD... 11 Tabel 3.1 Daftar komponen rangkaian driver motor... 16
1
BAB I
PENDAHULUAN
1.1 Latar Belakang
Sistem pengendali motor DC merupakan salah satu dari sekian banyak sistem
kendali. Banyak sistem yang digunakan untuk mengendalikan motor DC seperti kendali
logika fuzzy, logika PID yang pengaplikasiannya kebanyakan pada robot line follower atau
robot wall follower.
[1]Dari jenis pengaplikasian diatas pengendalian motor DC sering di aplikasikan pada
robot yang dapat mengikuti jalur atau dinding. Sistem kendali yang sering digunakan pada
umumnya adalah kendali PID. Kendali PID merupakan gabungan dari proporsional (K
p),
integral (K
i) dan derivative (K
d)
[1]. Tujuan digunakannya sistem kendali PID yaitu untuk
membuat nilai keluaran dan nilai yang diinginkan (referensi) sedekat mungkin, dalam hal
ini menghasilkan nilai error sekecil mungkin.
[5]Dalam
pengendalian motor DC banyak sekali gangguan dalam hal ini
mengendalikan kecepatan motor. Diantaranya dengan penambahan beban dapat
mengurangi kecepatan motor. Maka dari itu agar didapatkan kecepatan yang stabil atau
mendekati stabil perlu dilakukan kajian lebih lanjut.
Dari uraian diatas muncul permasalahan dalam mengendalikan kecepatan motor
diantaranya bagaimana mengendalikan kecepatan motor DC pada mobil listrik, merancang
alat untuk mengendalikan kecepatan motor. Dari permasalahan ini dapat dibuat suatu alat
yang dapat mengendalikan kecepatan motor DC pada mobil listrik sehingga kecepatan
motor stabil atau mendekati stabil.
1.2 Rumusan Masalah
Agar tidak terjadi kesalah pahaman maka berdasarkan latar belakang diatas dapat
dibuat rumusan masalah sebagai berikut:
1. Bagaimana mengendalikan kecepatan motor DC pada mobil listrik ?
2. Bagaimana mendesain alat pengendali kecepatan motor DC pada mobil listrik ?
1.3 Batasan Masalah
Berdasarkan latar belakang dan rumusan masalah diatas, maka diperlukan batasan
dalam penelitian seperti berikut :
2. Mikrokontroller AT MEGA digunakan untuk mengolah data yang akan ditampilkan
pada LCD.
3. Pengolahan data dengan sistem PID.
1.4 Tujuan dan Manfaat
Berdasarkan latar belakang diatas maka dapat dibuat tujuan seperti berikut :
1. Mengendalikan kecepatan motor DC pada mobil listrik
2. Mendesain alat untuk mengendalikan motor DC
Adapun manfaat yang dapat diperoleh dari penelitian ini adalah memahami konsep
pengendalian motor DC pada mobil listrik
1.5 Metodologi
Study Literatur
Mengumpulkan bahan baik dari paper, jurnal maupun buku teori tentang kendali
PID.
Merancang Sistem
Merancang sistem secara umum, yaitu menggabungkan seluruh perangkat seperti
Mikrokontroler, driver motor, LCD, motor dan sensor enkoder..
Membuat Sistem Pengontrolan.
Membuat masing- masing sistem dari pembacaan sensor enkoder sampai pada
pengontrolan motor dc menggunakan kendali PID.
Pengujian Alat
Melakukan pengujian dan analisa alat pengendali kecepatan motr DC pada mobil
listrik.
Perbaikan Sistem
Perbaikan dari kesalahan dan perbaikan sistem yang dibuat.
Penyusunan Tugas Akhir
Menganalisa sistem serta penyempurnaan alat dan pemnyusuan tugas akhir.
1.6 Sistematika Penulisan
Sistematika penulisan merupakan bagian dari penulisan laporan yang mempunyai
tujuan untuk mempermudah pemahaman pembaca terhadap isi yang terkandung
3
Penulisan laporan ini dikelompokkan menjadi beberapa bagian antara lain:
BAB I
Pendahuluan berisikan latar brlakang, rumusan masalah, batasan masalah,
tujuan dan manfaat, metodologi, sistematika penulisan.
BAB II
Landasan teori menerangkan teori dasar yang digunakan, meliputi teori
tentang mikrokontroler, motor, driver motor dan sensor.
BAB III
Perancangan sistem menggambarkan desain perangkat lunak (software)
maupun perangkat kras (hardware).
BAB IV
Pengujian dan analisa sistem berisi tentang pengujian dan analisa sistem
yang dibuat.
BAB II
DASAR TEORI
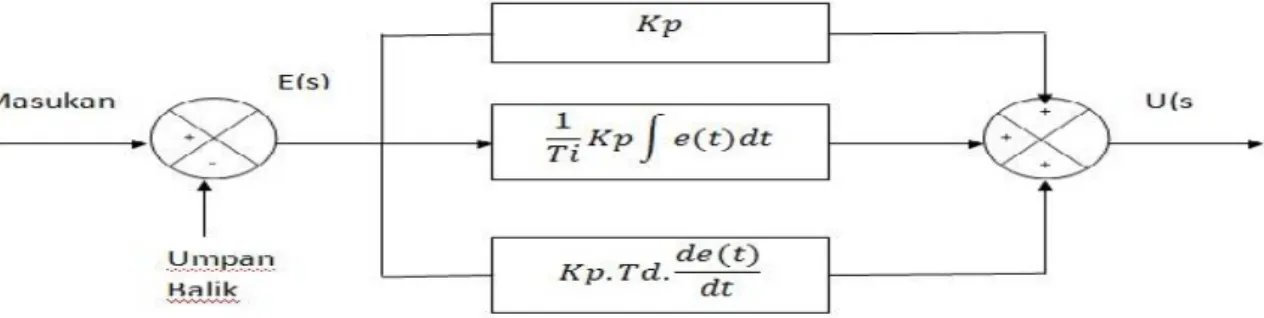
2.1 Kendali Proporsional Integral Derivative (PID)
Sistem pengendalian kecepatan motor memiliki berbagai logika dan metode
pengendalian. Salah satu yang sering digunakan dalam pengendalian kecepatan motor
adalah kendali logika PID. Kendali logika PID adalah gabungan dari sistem kendali
proporsional, integral, dan derivative yang masing
–
masing sistem ini memiliki
keunggulan
–
keunggulan tertentu dimana sistem kendali proporsional memiliki
keunggulan rise time yang cepat, sistem kendali integral memiliki keunggulan untuk
mempekecil error, dan sistem derivative memiliki keunggulan memperkecil error dan
meredam overshot. Untuk mendapatkan keluaran rise time yang cepat dan error yang kecil
dapat menggabungkan ketiga sistem kendali ini menjadi sistem PID.
[1]Gambar 2.1 Blok Diagram PID
Ada 3 macam kendali PID yaitu kendali PI, PD, dan PID. PI adalah kendali yang
menggunakan komponen proportional dan integral. PD adalah kendali yang menggunakan
komponen proportional dan derivative. Dan PID adalah kendali yang menggunakan
komponen proportional, integral, dan derivative.
2.1.1 Sistem Kendali PID
Pengendali PID paling banyak digunakan karena sederhana dan mudah dipelajari
serta tuning parameternya. Pengendali ini merupakan gabungan dari kendali proportional,
integral dan derivative. Berikut ini merupakan blok diagram dari sistem pengendali dengan
5
Gambar 2.2 Diagram Blok Close Loop
Keterangan:
Plant
: Sistem yang akan dikendalikan
Kontroller : Pengendali yang akan memberikan respon untuk memperbaiki respon
( ) =
+
+
... (2.1)
Keterangan:
MV
: Manipulated Variabel
Pout
: Keluaran Proportional
Iout
: Keluaran Integral
Dout
: Keluaran Derivative
Manipulated variabel (MV) adalah variabel yang nilai parameternya dapat diatur,
biasanya sama dengan keluaran dari pengendali u(t). Keluaran pengendali PID akan
mengubah respon mengikuti perubahan yang ada pada hasil pengukuran sensor dan
setpoint yang ditentukan. Pembuat dan pengembang PID menentukan nama untuk
mengidentifikasi ketiga mode pada pengendali yaitu:
P (K
p) = Konstanta Proportional
I (K
i) =
∫ =
.=
= Konstanta Integral
D (K
d) =
( )= Konstanta Derivative
Atau secara umum persamaanya adalah sebagai berikut:
+ ∫ ( ) +
( )=
( ) + ∫ ( ) +
( )... (2.2)
2.1.1 Kendali Proportional
Kontroler merupakan sebuah penguat input sehingga hasil pada output tidak
semakin menjadi kecil pada sebuah sistem. Output proportional adalah hasil perkalian
antara konstanta proportional dengan nilai errornya. Perubahan yang terjadi pada sinyal
input akan menyebabkan sistem secara langsung mengubah output sebesar konstanta
pengalinya. Fungsi atau keunggulan dari kendali proportional adalah rise time yang cepat
sehingga kendali proportional memberi pengaruh langsung (sebanding) pada error yaitu
semakin besar error, semakin besar sinyal kendali yang dihasilkan kendali proportional.
Sinyal kesalahan (error) merupakan selisih antara nilai setpoint dengan nilai aktual
yang terbaca. Selisih ini akan mempengaruhi sistem kendali untuk mengeluarkakn sinyal
positif (mempercepat tercapainya nilai setpoint) atau negatif (memperlambat tercapainya
nilai yang diinginkan).
Gambar 2.3 Blok Diagram Proportional
Ciri
–
ciri kendali proportional harus diperhatikan ketika kendali tersebut
diterapkan pada suatu sistem. Secara eksperimen pengguna kendali proportional harus
memperhatikan ketentuan-ketentuan berikut ini:
1. Jika nilai K
pkecil, kendali proportional hanya mampu melakukan koreksi
kesalahan yang kecil, sehingga mengahsilkan respon sistem yang lambat.
2. Jika nilai K
pdinaikkan, respon sistem menunjukkan semakin cepat mencapai
keadaan mantapnya.
3. Jika nilai K
pdiperbesar melebihi nilai yang diatur maka akan mengakibatkan
sistem kerja tidak stabil atau respon sistem akan berosilasi.
2.1.2 Kendali Integral
Kendali proportional tidak akan mampu menjamin output dari sistem akan menuju
ke keadaan yang diinginkan jika sebuah plant tidak memiliki unsur integrator. Pada
diagram blok kendali integral, menunjukkan hubungan antara nilai error dengan output.
Kendali integral membantu menaikkan respon sehingga menghasilkan output yang
diinginkan. Keunggulan kendali ini adalah untuk memperkecil nilai error yang dihasilkan.
7
Gambar 2.4 Blok Diagram Integral
Berikut ini adalah karakteristik dari sistem kendali integral ketika pengguna menggunakan
kendali ini yaitu:
1. Jika sinyal kesalahan bernilai nol, maka keluaran kendali akan bertahan pada nilai
sebelumnya.
2. Jika sinyal kesalahan tidak bernilai nol, maka keluaran akan menunjukkan kenaikan
atau penurunan yang dipengaruhi oleh besarnya sinyal kesalahan dan nilai K
i.
3. Keluaran kendali membutuhkan selang waktu tertentu, sehingga kendali integral
cenderung memperlambat respon.
4. Konstanta integral K
iyang nilainya besar akan mempercepat hilangnya nilai offset.
Tetapi semakin besar nilai konstanta K
iakan mengakibatkan peningkatan osilasi
dari sinyal keluaran.
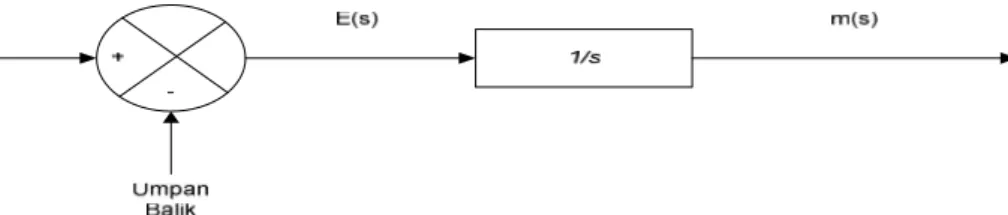
2.1.3 Kendali Derivative
Kendali derivatif memiliki sifat keluaran seperti halnya suatu operasi diferensial.
Perubahan yang mendadak pada masukan kendali akan mengakibatkan perubahan yang
sangat besar dan cepat. Gambar 2.5 menunjukkan blok diagram yang menggambarkan
hubungan antara sinyal kesalahan dengan keluaran kendali.
Pada pengendali derivative nilai output pengendali m(s) merupakan fungsi
diferensiasi dari sinyal kesalahan e(s), yaitu:
Kontrol Derivative hanya berubah saat ada perubahan error sehingga saat error
statis kontrol ini tidak akan bereaksi, hal ini pula yang menyebabkan kontroler Derivative
tidak dapat dipakai sendiri. Untuk mendapatkan aksi kontrol yang baik diperlukan langkah
coba-coba dengan kombinasi antara P, I dan D sampai ditemukan nilai K
p,K
idan K
dseperti yang diinginkan.
Karakteristik pengendali derivative adalah sebagai berikut:
1. Pengendali ini tidak dapat menghasilkan keluaran jika tidak ada perubahan pada
masukannya (berupa sinyal kesalahan).
2. Jika sinyal kesalahan erubah terhadap waktu, maka keluaran yang dihasilkan
pengendali tergantung pada nilai T
ddan laju perubahan sinyal kesalahan.
3. Pengendali derivative mempunyai suatu karakter untuk mendahului, sehingga
pengendali ini dapat mengoreksi yang signifikan sebelum pembangkit kesalahan
menjadi besar. Jadi pengendali derivative dapat mengantisipasi pembangkit
kesalahan, memberikan aksi yang bersifat korektif, dan cenderung meningkatkan
stabilitas sistem.
Berdasarkan karakteristik pengendali derivative diatas, pengendali ini umumnya
dipakai untuk mempercepat respon awal suatu sistem, tetapi tidak memperkecil kesalahan
pada keadaan stabilnya.kerja pengendali ini hanya efektif pada lingkup yang sempit, yaitu
pada periode peralihan. Oleh sebab itu pengendali ini tidak pernah digunakan tanpa ada
pengendali lain pada sebuah sistem.
[5]2.2 Mikrokontroller Arduino
Arduino Uno adalah board berbasis mikrokontroller pada AT MEGA 328. Board ini
memiliki 14 digital input / output pin (dimana 6 pin dapat digunakan sebagai output
9
Berikut ini fitur-fitur yang terdapat dalam mikrokontroller arduino uno:
Mikrokontroller ATmega 328
Operasi tegangan 5V
Tegangan input 7 sampai 12 V (rekomendasi)
Input /output 14 pin (6 pin untuk pwm)
Arus 50 mA (3.3 V)
Batas tegangan 6 sampai 20 V
Pin analog input 6
Flash memori 32 KB (ATmega 328)
Bootloader 2KB
EEPROM 1 KB (ATmega 328)
Kecepatan clock 16 MHz
2.3 PWM
PWM (Pulse Width Modulation) adalah sebuah cara memanipulasi lebar sinyal
yang dinyatakan dengan pulsa dalam satu perioda, untuk mendapatkan tegangan rata
–
rata
yang berbeda.
2.3.1 Konsep Dasar PWM
Sinyal PWM pada umumnya memiliki amplitudo dan frekuensi dasar yang tetap,
namun memiliki lebar pulsa yang bervariasi. Lebar pulsa PWM berbanding lurus dengan
amplitudo sinyal asli yang belum termodulasi. Artinya, sinyal PWM memiliki frekuensi
gelombang yang tetap namun duty cycle bervariasi antara 0% hingga 100%.
[1]Berdasarkan gambar diatas didapat persamaan sebagai berikut:
=
+
...(2.3)
=
...(2.4)
=
...(2.5)
=
...(2.6)
Keterangan:
T
on= Waktu Pulsa “
High
”
.
T
off= Waktu Pulsa
“
Low
”
.
D
= Duty Cycle adalah lamanya pulsa high dalam satu periode.
2.4 Enkoder
Enkoder adalah rangkaian yang memiliki fungsi berkebalikan dengan dekoder.
Enkoder berfungsi sebagai rangakaian untuk mengkodekan data input mejadi data bilangan
dengan format tertentu. Enkoder dalam rangkaian digital
adalah rangkaian kombinasi
gerbang digital yang memiliki input banyak dalam bentuk line input dan memiliki output
sedikit dalam format bilangan biner. Enkoder akan mengkodekan setiap jalur input yang
aktif menjadi kode bilangan biner. Dalam teori digital banyak ditemukan istilah enkoder
seperti “Desimal to BCD Enkoder” yang berarti rangkaian digital yang berfungsi untuk
mengkodekan line input dengan jumlah line input desimal (0-9) menjadi kode bilangan
biner 4 bit BCD (Binary Coded Decimal
) atau “8
line to 3 line
enkoder” yang berarti
rangkaian enkoder dengan input 8 line dan output 3 line (3 bit BCD).
Gambar 2.8 Enkoder
11
Enkoder dalam contoh ini adalah enkoder desimal ke BCD (Binary Coded
Decimal) yaitu rangkaian enkoder dengan input 9 line dan output 4 bit data BCD.
[4]2.5 LCD Display
LCD display adalah sebuah modul yang di dalamnya terdapat beberapa komponen
yang disusun menjadi satu. Tampilan LCD terdiri dari dua bagian, yakni bagian panel LCD
yang terdiri dari banyak “titik”
LCD dan sebuah mikrokontroller yang menempel dipanel
yang berfungsi m
engatur ‘titik
-
titik’
LCD tadi menjadi huruf atau angka yang terbaca.
Huruf atau angka yang akan ditampilkan dikirim ke LCD dalam bentuk kode ASCII, kode
ASCII ini diterima dan diolah oleh mikrokontroller di dalam LCD
menjadi ‘titik
-
titik’
LCD
yang terbaca sebagai huruf atau angka. Pada Tabel 2.2 ditunjukan fungsi pin LCD.
[1]Tabel 2.1 Tabel fungsi pin LCD
No. Simbol Level Fungsi
1 Vss -Power Supply 0V (GND) 2 Vcc - 5V ± 10% 3 Vcc - LCD Drive 4 RS H/L H: Data In L: Instrustion In 5 R/W H/L H: Read L: Write 6 E H,↓ Sinyal Enable 7 DB0 H/L Data Bus 8 DB1 H/L 9 DB2 H/L 10 DB3 H/L 11 DB4 H/L 12 DB5 H/L 13 DB6 H/L 14 DB7 H/L
15 V+BL - Back light Supply 4-4,2V 50-200mA
BAB III
Perancangan Sistem
Pada Tugas Akhir ini dilakukan perancangan sistem kendali motor DC untuk
menghasilkan kecepatan yang stabil pada mobil listrik menggunakan kendali PID. Adapun
tahapan pengerjaan sebagai berikut:
3.1 Perancangan Penelitian dan Tahap-tahap Penelitian
Perancangan penelitian ini melalui beberapa tahapan sebagai berikut:
1. Pembuatan alat yang menggunakan peralatan elektronika.
2. Pembuatan perangkat lunak.
3. Pengujian pembacaan enkoder.
4. Pengujian motor dengan input PWM tetap.
5. Pengujian motor tanpa beban dengan tujuan untuk memastikan kecepatan motor
sesuai dengan setpoint.
6. Pengujian motor dengan beban dengan tujuan untuk memastikan kecepatan motor
sesuai dengan setpoint.
7. Melakukan pengamatan enkoder terhadap pembacaan RPM.
8. Melakukan pengamatan kecepatan motor dengan input PWM tetap.
9. Melakukan pengamatan kecepatan motor tanpa beban.
10. Melakukan pengamatan kecepatan motor dengan beban.
11. Melakukan analisa terhadap hasil pengamatan dan pengambilan suatu kesimpulan
dari analisa.
12. Penyusunan tugas akhir.
3.2 Perancangan Model
Pada perancangan Tugas Akhir ini terdiri dari tiga tahapan yaitu perancangan
perangkat keras, perancangan perangkat lunak dan perancangan PID.
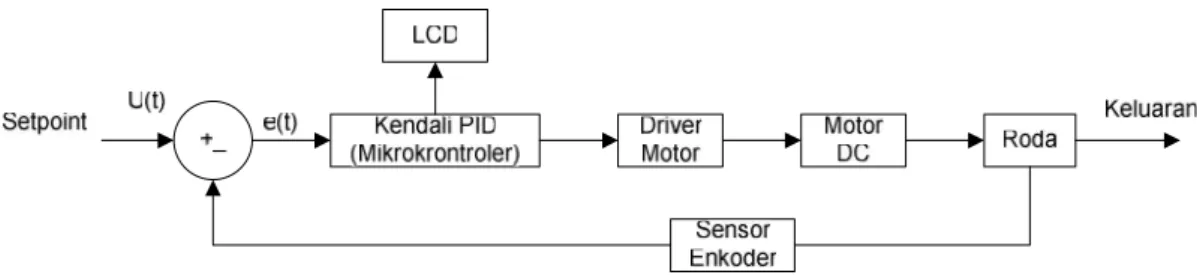
3.2.1 Perancangan Perangkat Keras (Hardware)
Blok diagram perancangan perangkat keras pengontrol motor DC dapat dilihat pada
gambar 3.1. Perancangan berikut ini meliputi perancangan sensor enkoder, LCD dan
13
Gambar 3.1 Blok diagram perangkat keras
3.2.2 Rangkaian Sistem Minimum Mikrokontroller AT MEGA 328
Dalam perancangan ini mikrokontroller AT MEGA 328 digunakan untuk mengolah
sinyal dari data sensor enkoder yang masuk. Data yang dikirim enkoder berupa data pulsa
yang kemudian diubah oleh mikrokontroller menjadi data kecepatan. Data tersebut
dibandingkan dengan setpoint yang diinginkan untuk mendapatkan error dan delta error.
Data ini kemudian diolah oleh sistem kendali PID yang diprogram pada mikrokontroller.
Keluaran dari ini yang diinginkan berupa PWM yang kemudian mengirimkan data ke
motor DC sehingga motor dapat bekerja seperti setpoint. Kemudian data kecepatan
ditampilkan di LCD.
Rangkaian sistem mikrokontroller dapat dilihat pada gambar 3.2 Perancangan
mikrokontroller.
Gambar 3.2 Perancangan Mikrokontroller
3.2.3 Perancangan Rangkaian Enkoder
Enkoder digunakan sebagai umpan balik ke sistem. Data yang keluar berupa data
RPM yang akan dibandingkan dengan nilai setpoint. Hasil perbandingan ini akan
PID di mikrokontroller. Gambar rangkaian enkoder dapat dilihat pada gambar 3.3
Rancangan sensor enkoder.
Gambar 3.3 Rancangan Sensor Enkoder
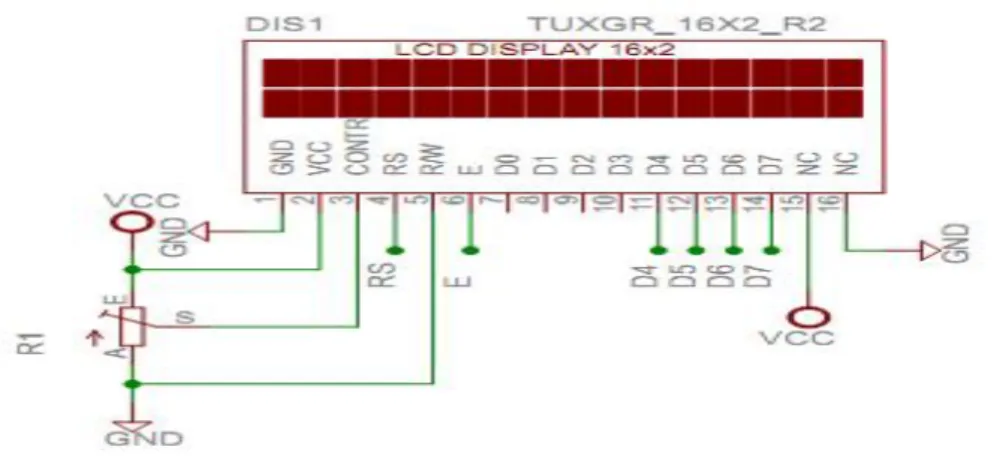
3.2.4 Perancangan LCD
Perancangan tampilan LCD digunakan sebagai tampilan nilai RPM. Pada
perancangan ini LCD yang digunaka dalah LCD dengan karakter 16 x 2.
Rancangan ini dapat dilihat pada gambar 3.4 Rancangan tampilan LCD.
Gambar 3.4 Rancangan Tampilan LCD
3.2.5 Perancangan Perangkat Motor
Perancangan perangkat motor ini merupakan rancangan secara keseluruhan sistem,
dimana rancangan ini sudah dilengkapi sensor enkoder, mikrokontroller, driver motor dan
LCD. Rancangan ini akan digunakan sebagai pengujian mengendalikan kecepatan motor
DC pada mobil listrik. Gambar perancangan perangkat motor dapat dilihat pada gambar
3.5 dibawah ini.
15
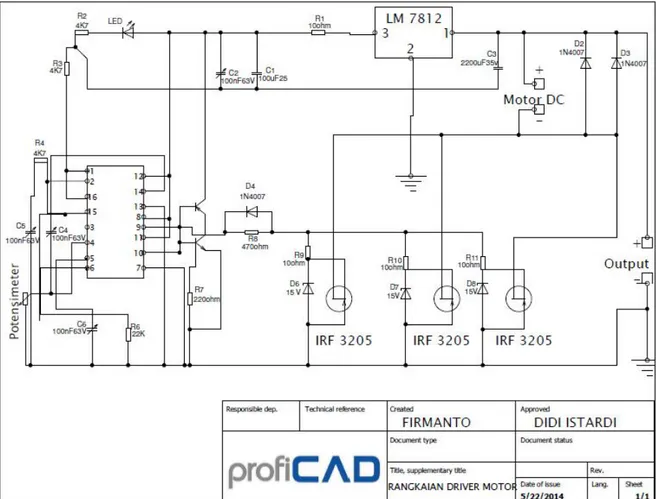
3.2.6 Perancangan Perangkat Driver Motor
Perancangan perangkat driver motor ini merupakan rancangan driver motor yang
berfungsi sebagai pengatur PWM. Driver motor yang digunakn adalah rangkaian H-Bridge
Mosfet IRF 3205. Gambar skematik rangkaian driver motor dapat dilihat pada gambar
dibawah ini.
Adapun komponen yang digunakan dalam rangkaian diatas dapat dilihat pada tabel
3.1 berikut ini.
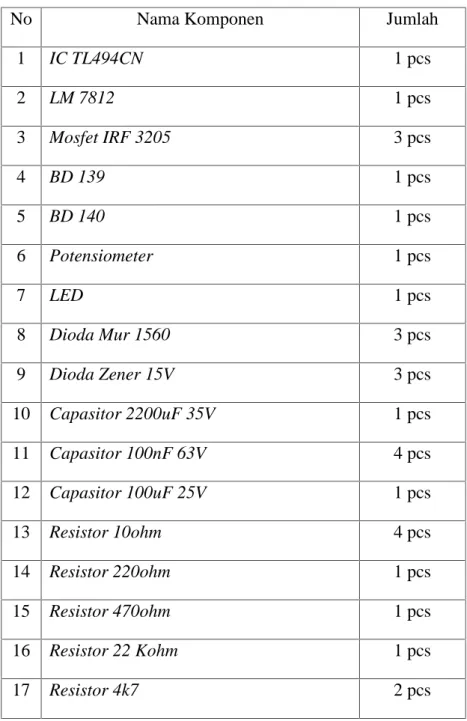
Tabel 3.1 Daftar komponen rangkaian driver motor
No
Nama Komponen
Jumlah
1
IC TL494CN
1 pcs
2
LM 7812
1 pcs
3
Mosfet IRF 3205
3 pcs
4
BD 139
1 pcs
5
BD 140
1 pcs
6
Potensiometer
1 pcs
7
LED
1 pcs
8
Dioda Mur 1560
3 pcs
9
Dioda Zener 15V
3 pcs
10
Capasitor 2200uF 35V
1 pcs
11
Capasitor 100nF 63V
4 pcs
12
Capasitor 100uF 25V
1 pcs
13
Resistor 10ohm
4 pcs
14
Resistor 220ohm
1 pcs
15
Resistor 470ohm
1 pcs
16
Resistor 22 Kohm
1 pcs
17
Resistor 4k7
2 pcs
3.3 Perancangan Perangkat Lunak
Perancangan perangkat lunak pada Tugas Akhir ini adalah bahasa C pada
mikrokontroller AT MEGA 328. Mikrokontroller diprogram dengan bahasa C untuk
menginisialisasi port digital dan analog. Port digital digunakan untuk pembacaan sensor
enkoder, keluaran PWM, keluaran motor dan tampilan LCD. Sedangkan untuk port analog
digunakan untuk input potensiometer yang digunakan sebagai data setpoint.
17
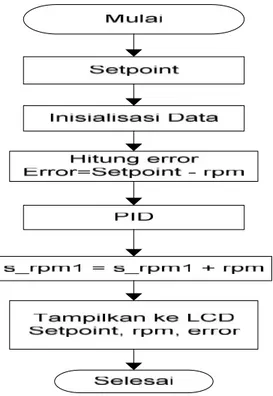
Adapun alur pemrograman bahasa C pada mikrokontroller dapat dilihat pada
gambar 3.7 Flowchart PID pada mikrokontroller.
Gambar 3.7 Flowchart PID Pada Mikrokontroller
Berdasarkan dari flowchart diatas bahwa pertama yang dilakukan yaitu dengan
memberikan setpoint atau nilai yang kita inginkan dan akan diproses atau inisialisasi pada
mikrokontroler. Setelah itu hitung error dengan cara error = setpoint
–
rpm kemudian
diproses dengan PID dengan s_rpm1 = s_rpm1 + rpm. Proses terakhir yaitu menampilkan
nilai setpoint, error dan rpm pada LCD.
3.4 Instrument Penelitian
1. Penelitian ini membutuhkan peralatan dan bahan seperti:
a. 1 unit Kit Mikrokontroller
b. 1 unit Laptop
c. 1 unit Enkoder
d. 1 unit Motor DC
e. 1 unit LCD
f. 1 unit Potensiometer
g. 1 unit Tachometer
h. 1 unit Driver Motor
i. Software mikrokontroller
j. 2 unit Aki 12 V 35 AH
2. Penelitian ini dilakukan diarea gedung bengkel Politeknik Negeri Batam.
3.5 Prosedur Pelaksanaan Pengujian
3.5.1Pengujian Sensor Enkoder
Tujuan dari pengujian rangkaian sensor enkoder adalah untuk mengetahui apakah
sensor enkoder sudah dapat bekerja dengan benar. Pembacaan enkoder terhadap kecepatan
motor dapat dibandingkan dengan tachometer apakah sama atau ada perubahan kecepatan
motor.
1. Prosedur Pengujian
a. Mikrokontroller diprogram agar dapat menerima data dari kecepatan motor
dengan input dari sensor enkoder.
b. LCD menampilkan nilai dari enkoder dan jika nilai enkoder sudah mendekati nilai
tachometer maka sensor enkoder sudah dapat berfungsi.
Gambar 3.8 Tampilan Hasil Pengujian Pembacaan Kecepatan Dengan Tachometer
3.5.2 Pengujian Motor dengan Input PWM Tetap
Tujuan dari pengujian ini adalah untuk mengetahui seberapa besar nilai kecepatan
motor dengan kondisi PWM tetap. Dengan mengetahui nilai kecepatan ini akan didapatkan
nilai error rata-rata dari kecepatan motor yang konstan.
1. Prosedur Pengujian
a. Hubungkan dengan tegangan baterai 24 V 35 AH.
19
3.5.3 Pengujian Motor Tanpa Beban
Tujuan dari pengujian ini adalah untuk mengetahui seberapa cepat motor dapat
mencapai nilai setpoint yang diatur. Dengan mengetahui hasil pengujian ini maka motor
dapat bekerja sesuai setpoint yang diinginkan.
1. Perangkat yang digunakan dalam pengujian yaitu:
a. Mikrokontroller.
b. Motor DC yang telah terpasang encoder.
2. Prosedur pengujian
a. Atur nilai setpoint.
b. Catat hasil pengujian.
3.5.4 Pengujian Motor dengan Beban
Tujuan dari pengujian ini adalah untuk mengetahui ke stabilan kecepatan motor
jika ada beban yang diberikan. Dengan mengetahui hasil ke stabilan kecepatan motor
dengan beban maka kerja dari sistem ini dapat dikatakan berfungsi dengan baik.
1. Perangkat yang digunakan dalam pengujian ini yaitu:
a. Mikrokontroller.
b. Motor DC yang sudah terpasang encoder.
2. Prosedur Pengujian
a. Beri beban seperti mobil dikemudikan oleh satu orang.
b. Atur setpoint.
c. Menunggu kecepatan stabil.
d. Lakukan pengamatan kecepatan motor setelah diberikan beban.
e. Catat hasil Pengujian.
3.6 Cara Pengolahan dan Analisa Data
Data yang dihasilkan oleh alat ini adalah besaran kesalahan dari kecepatan motor
yang dibandingkan dengan setpoint. Analisa data yang digunakan untuk seluruh sistem
adalah sebagai berikut:
1. Analisa hasil nilai sensor enkoder yang sudah dikonversikan dalam bentuk kecepatan
terhadap tachometer yaitu alat pengukuran kecepatan sudah standar.
BAB IV
Pengujian dan Analisa
4.1 Hasil Pengujian
Data yang diambil dibawah ini adalah data dengan mengatur nilai K
p= 1.36,
K
i= 0.2 dan K
d= 1.33.
4.1.1 Data Pengujian Motor Tanpa Beban
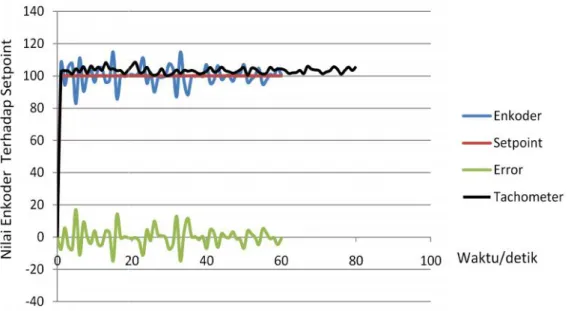
1. Data Grafik Setpoint 100
Berdasarkan gambar 4.1 pada setpoint 100 yang kita berikan respon dari enkoder
masih tidak baik, terlihat masih besarnya osilasi yang dihasilkan. Begitu juga dengan
error yang masih terlihat besar nilai errornya dikarenakan nilai enkoder yang belum baik,
karena error didapat dari error = setpoint
–
enkoder. Nilai dari tachometer terlihat sudah
mendekati dari setpoint yang kita atur. Dalam pengujian ini dilakukan dengan keadaan
roda tergantung atau tidak menyentuh tanah dan tanpa beban.
Gambar 4.1 Grafik Setpoint 100
2 Data Grafik Setpoint 200
Berdasarkan gambar 4.2 menjelaskan bahwa respon dari enkoder terhadap setpoint
masih tidak baik karena digrafik terlihat osilasi yang masih besar. Begitu juga dengan nilai
error yang masih besar osilasinya karena nilai error didapat dari error = setpoint
–
enkoder. Nilai dari tachometer mendekati nilai setpoint meski terlihat masih diatas dari
BAB IV
Pengujian dan Analisa
4.1 Hasil Pengujian
Data yang diambil dibawah ini adalah data dengan mengatur nilai K
p= 1.36,
K
i= 0.2 dan K
d= 1.33.
4.1.1 Data Pengujian Motor Tanpa Beban
1. Data Grafik Setpoint 100
Berdasarkan gambar 4.1 pada setpoint 100 yang kita berikan respon dari enkoder
masih tidak baik, terlihat masih besarnya osilasi yang dihasilkan. Begitu juga dengan
error yang masih terlihat besar nilai errornya dikarenakan nilai enkoder yang belum baik,
karena error didapat dari error = setpoint
–
enkoder. Nilai dari tachometer terlihat sudah
mendekati dari setpoint yang kita atur. Dalam pengujian ini dilakukan dengan keadaan
roda tergantung atau tidak menyentuh tanah dan tanpa beban.
Gambar 4.1 Grafik Setpoint 100
2 Data Grafik Setpoint 200
Berdasarkan gambar 4.2 menjelaskan bahwa respon dari enkoder terhadap setpoint
masih tidak baik karena digrafik terlihat osilasi yang masih besar. Begitu juga dengan nilai
error yang masih besar osilasinya karena nilai error didapat dari error = setpoint
–
enkoder. Nilai dari tachometer mendekati nilai setpoint meski terlihat masih diatas dari
BAB IV
Pengujian dan Analisa
4.1 Hasil Pengujian
Data yang diambil dibawah ini adalah data dengan mengatur nilai K
p= 1.36,
K
i= 0.2 dan K
d= 1.33.
4.1.1 Data Pengujian Motor Tanpa Beban
1. Data Grafik Setpoint 100
Berdasarkan gambar 4.1 pada setpoint 100 yang kita berikan respon dari enkoder
masih tidak baik, terlihat masih besarnya osilasi yang dihasilkan. Begitu juga dengan
error yang masih terlihat besar nilai errornya dikarenakan nilai enkoder yang belum baik,
karena error didapat dari error = setpoint
–
enkoder. Nilai dari tachometer terlihat sudah
mendekati dari setpoint yang kita atur. Dalam pengujian ini dilakukan dengan keadaan
roda tergantung atau tidak menyentuh tanah dan tanpa beban.
Gambar 4.1 Grafik Setpoint 100
2 Data Grafik Setpoint 200
Berdasarkan gambar 4.2 menjelaskan bahwa respon dari enkoder terhadap setpoint
masih tidak baik karena digrafik terlihat osilasi yang masih besar. Begitu juga dengan nilai
error yang masih besar osilasinya karena nilai error didapat dari error = setpoint
–
enkoder. Nilai dari tachometer mendekati nilai setpoint meski terlihat masih diatas dari
21
setpoint yang diatur. Dalam pengujian ini dilakukan dengan keadaan roda tergantung atau
tidak menyentuh tanah dan tanpa beban.
Gambar 4.2 Grafik Setpoint 200
3. Data Grafik Setpoint 300
Berdasarkan gambar 4.3 menjelaskan nilai dari enkoder sudah berusaha mendekati
nilai setpoint yang diatur walaupun masih terlihat osilasi yang besar. Nilai error juga mulai
mengecil karena dipengaruhi dari selisih nilai setpoint dan enkoder. Nilai tachometer
sudah mendekati setpoint yang diatur. Dalam pengujian ini dilakukan dengan keadaan roda
tergantung atau tidak menyentuh tanah dan tanpa beban.
Gambar 4.3 Grafik Setpoint 300
21
setpoint yang diatur. Dalam pengujian ini dilakukan dengan keadaan roda tergantung atau
tidak menyentuh tanah dan tanpa beban.
Gambar 4.2 Grafik Setpoint 200
3. Data Grafik Setpoint 300
Berdasarkan gambar 4.3 menjelaskan nilai dari enkoder sudah berusaha mendekati
nilai setpoint yang diatur walaupun masih terlihat osilasi yang besar. Nilai error juga mulai
mengecil karena dipengaruhi dari selisih nilai setpoint dan enkoder. Nilai tachometer
sudah mendekati setpoint yang diatur. Dalam pengujian ini dilakukan dengan keadaan roda
tergantung atau tidak menyentuh tanah dan tanpa beban.
Gambar 4.3 Grafik Setpoint 300
21
setpoint yang diatur. Dalam pengujian ini dilakukan dengan keadaan roda tergantung atau
tidak menyentuh tanah dan tanpa beban.
Gambar 4.2 Grafik Setpoint 200
3. Data Grafik Setpoint 300
Berdasarkan gambar 4.3 menjelaskan nilai dari enkoder sudah berusaha mendekati
nilai setpoint yang diatur walaupun masih terlihat osilasi yang besar. Nilai error juga mulai
mengecil karena dipengaruhi dari selisih nilai setpoint dan enkoder. Nilai tachometer
sudah mendekati setpoint yang diatur. Dalam pengujian ini dilakukan dengan keadaan roda
tergantung atau tidak menyentuh tanah dan tanpa beban.
4.
Data Grafik Setpoint 400
Berdasarkan gambar 4.4 setpoint yang diatur adalah 400, terlihat respon dari nilai
enkoder sudah bagus dan berusaha mendekati setpoint dan mempertahankan nilai yang
mendekati setpoint tersebut. Nilai error juga terlihat stabil karena nilai error dipengaruhi
dari nilai setpoint dan enkoder, karena error didapat dari error = setpoint
–
enkoder. Nilai
dari tachometer masih diatas nilai setpoint namun masih mendekati dari setpoint yang
diatur. Dalam pengujian ini dilakukan dengan keadaan roda tergantung atau tidak
menyentuh tanah dan tanpa beban.
Gambar 4.4 Grafik Setpoint 400
5. Data Grafik Setpoint 500
Berdasarkan gambar 4.5 setpoint yang diatur adalah 500, terlihat respon dari nilai
enkoder sudah bagus dan berusaha mendekati setpoint dan mempertahankan nilai yang
mendekati setpoint tersebut. Nilai error juga terlihat stabil karena nilai error dipengaruhi
dari nilai setpoint dan enkoder, karena error didapat dari error = setpoint
–
enkoder. Nilai
dari tachometer masih diatas nilai setpoint namun masih mendekati dari setpoint yang
diatur. Dalam pengujian ini dilakukan dengan keadaan roda tergantung atau tidak
menyentuh tanah dan tanpa beban.
4.
Data Grafik Setpoint 400
Berdasarkan gambar 4.4 setpoint yang diatur adalah 400, terlihat respon dari nilai
enkoder sudah bagus dan berusaha mendekati setpoint dan mempertahankan nilai yang
mendekati setpoint tersebut. Nilai error juga terlihat stabil karena nilai error dipengaruhi
dari nilai setpoint dan enkoder, karena error didapat dari error = setpoint
–
enkoder. Nilai
dari tachometer masih diatas nilai setpoint namun masih mendekati dari setpoint yang
diatur. Dalam pengujian ini dilakukan dengan keadaan roda tergantung atau tidak
menyentuh tanah dan tanpa beban.
Gambar 4.4 Grafik Setpoint 400
5. Data Grafik Setpoint 500
Berdasarkan gambar 4.5 setpoint yang diatur adalah 500, terlihat respon dari nilai
enkoder sudah bagus dan berusaha mendekati setpoint dan mempertahankan nilai yang
mendekati setpoint tersebut. Nilai error juga terlihat stabil karena nilai error dipengaruhi
dari nilai setpoint dan enkoder, karena error didapat dari error = setpoint
–
enkoder. Nilai
dari tachometer masih diatas nilai setpoint namun masih mendekati dari setpoint yang
diatur. Dalam pengujian ini dilakukan dengan keadaan roda tergantung atau tidak
menyentuh tanah dan tanpa beban.
4.
Data Grafik Setpoint 400
Berdasarkan gambar 4.4 setpoint yang diatur adalah 400, terlihat respon dari nilai
enkoder sudah bagus dan berusaha mendekati setpoint dan mempertahankan nilai yang
mendekati setpoint tersebut. Nilai error juga terlihat stabil karena nilai error dipengaruhi
dari nilai setpoint dan enkoder, karena error didapat dari error = setpoint
–
enkoder. Nilai
dari tachometer masih diatas nilai setpoint namun masih mendekati dari setpoint yang
diatur. Dalam pengujian ini dilakukan dengan keadaan roda tergantung atau tidak
menyentuh tanah dan tanpa beban.
Gambar 4.4 Grafik Setpoint 400
5. Data Grafik Setpoint 500
Berdasarkan gambar 4.5 setpoint yang diatur adalah 500, terlihat respon dari nilai
enkoder sudah bagus dan berusaha mendekati setpoint dan mempertahankan nilai yang
mendekati setpoint tersebut. Nilai error juga terlihat stabil karena nilai error dipengaruhi
dari nilai setpoint dan enkoder, karena error didapat dari error = setpoint
–
enkoder. Nilai
dari tachometer masih diatas nilai setpoint namun masih mendekati dari setpoint yang
diatur. Dalam pengujian ini dilakukan dengan keadaan roda tergantung atau tidak
menyentuh tanah dan tanpa beban.
23
Gambar 4.5 Grafik Setpoint 500
6. Data Grafik Setpoint 600
Berdasarkan gambar 4.6 setpoint yang diatur adalah 600, terlihat respon dari nilai
enkoder sudah bagus dan berusaha mendekati setpoint dan mempertahankan nilai yang
mendekati setpoint tersebut. Nilai error juga terlihat stabil karena nilai error dipengaruhi
dari nilai setpoint dan enkoder, karena error didapat dari error = setpoint
–
enkoder. Nilai
dari tachometer masih diatas nilai setpoint namun masih mendekati dari setpoint yang
diatur. Dalam pengujian ini dilakukan dengan keadaan roda tergantung atau tidak
menyentuh tanah dan tanpa beban.
Gambar 4.6 Grafik Setpoint 600
23
Gambar 4.5 Grafik Setpoint 500
6. Data Grafik Setpoint 600
Berdasarkan gambar 4.6 setpoint yang diatur adalah 600, terlihat respon dari nilai
enkoder sudah bagus dan berusaha mendekati setpoint dan mempertahankan nilai yang
mendekati setpoint tersebut. Nilai error juga terlihat stabil karena nilai error dipengaruhi
dari nilai setpoint dan enkoder, karena error didapat dari error = setpoint
–
enkoder. Nilai
dari tachometer masih diatas nilai setpoint namun masih mendekati dari setpoint yang
diatur. Dalam pengujian ini dilakukan dengan keadaan roda tergantung atau tidak
menyentuh tanah dan tanpa beban.
Gambar 4.6 Grafik Setpoint 600
23
Gambar 4.5 Grafik Setpoint 500
6. Data Grafik Setpoint 600
Berdasarkan gambar 4.6 setpoint yang diatur adalah 600, terlihat respon dari nilai
enkoder sudah bagus dan berusaha mendekati setpoint dan mempertahankan nilai yang
mendekati setpoint tersebut. Nilai error juga terlihat stabil karena nilai error dipengaruhi
dari nilai setpoint dan enkoder, karena error didapat dari error = setpoint
–
enkoder. Nilai
dari tachometer masih diatas nilai setpoint namun masih mendekati dari setpoint yang
diatur. Dalam pengujian ini dilakukan dengan keadaan roda tergantung atau tidak
menyentuh tanah dan tanpa beban.
7. Data Grafik Setpoint 700
Berdasarkan gambar 4.7 setpoint yang diatur adalah 700, terlihat respon dari nilai
enkoder sudah bagus dan berusaha mendekati setpoint dan mempertahankan nilai yang
mendekati setpoint tersebut. Nilai error juga terlihat stabil karena nilai error dipengaruhi
dari nilai setpoint dan enkoder, karena error didapat dari error = setpoint
–
enkoder. Nilai
dari tachometer masih diatas nilai setpoint namun masih mendekati dari setpoint yang
diatur. Dalam pengujian ini dilakukan dengan keadaan roda tergantung atau tidak
menyentuh tanah dan tanpa beban.
Gambar 4.7 Grafik Setpoint 700
8.
Data Grafik Setpoint 800
Berdasarkan gambar 4.8 setpoint yang diatur adalah 800, terlihat respon dari nilai
enkoder sudah bagus dan berusaha mendekati setpoint dan mempertahankan nilai yang
mendekati setpoint tersebut. Nilai error juga terlihat stabil karena nilai error dipengaruhi
dari nilai setpoint dan enkoder, karena error didapat dari error = setpoint
–
enkoder. Nilai
dari tachometer masih diata nilai setpoint namun masih mendekati dari setpoint yang
diatur. Dalam pengujian ini dilakukan dengan keadaan roda tergantung atau tidak
menyentuh tanah dan tanpa beban.
7. Data Grafik Setpoint 700
Berdasarkan gambar 4.7 setpoint yang diatur adalah 700, terlihat respon dari nilai
enkoder sudah bagus dan berusaha mendekati setpoint dan mempertahankan nilai yang
mendekati setpoint tersebut. Nilai error juga terlihat stabil karena nilai error dipengaruhi
dari nilai setpoint dan enkoder, karena error didapat dari error = setpoint
–
enkoder. Nilai
dari tachometer masih diatas nilai setpoint namun masih mendekati dari setpoint yang
diatur. Dalam pengujian ini dilakukan dengan keadaan roda tergantung atau tidak
menyentuh tanah dan tanpa beban.
Gambar 4.7 Grafik Setpoint 700
8.
Data Grafik Setpoint 800
Berdasarkan gambar 4.8 setpoint yang diatur adalah 800, terlihat respon dari nilai
enkoder sudah bagus dan berusaha mendekati setpoint dan mempertahankan nilai yang
mendekati setpoint tersebut. Nilai error juga terlihat stabil karena nilai error dipengaruhi
dari nilai setpoint dan enkoder, karena error didapat dari error = setpoint
–
enkoder. Nilai
dari tachometer masih diata nilai setpoint namun masih mendekati dari setpoint yang
diatur. Dalam pengujian ini dilakukan dengan keadaan roda tergantung atau tidak
menyentuh tanah dan tanpa beban.
7. Data Grafik Setpoint 700
Berdasarkan gambar 4.7 setpoint yang diatur adalah 700, terlihat respon dari nilai
enkoder sudah bagus dan berusaha mendekati setpoint dan mempertahankan nilai yang
mendekati setpoint tersebut. Nilai error juga terlihat stabil karena nilai error dipengaruhi
dari nilai setpoint dan enkoder, karena error didapat dari error = setpoint
–
enkoder. Nilai
dari tachometer masih diatas nilai setpoint namun masih mendekati dari setpoint yang
diatur. Dalam pengujian ini dilakukan dengan keadaan roda tergantung atau tidak
menyentuh tanah dan tanpa beban.
Gambar 4.7 Grafik Setpoint 700
8.
Data Grafik Setpoint 800
Berdasarkan gambar 4.8 setpoint yang diatur adalah 800, terlihat respon dari nilai
enkoder sudah bagus dan berusaha mendekati setpoint dan mempertahankan nilai yang
mendekati setpoint tersebut. Nilai error juga terlihat stabil karena nilai error dipengaruhi
dari nilai setpoint dan enkoder, karena error didapat dari error = setpoint
–
enkoder. Nilai
dari tachometer masih diata nilai setpoint namun masih mendekati dari setpoint yang
diatur. Dalam pengujian ini dilakukan dengan keadaan roda tergantung atau tidak
menyentuh tanah dan tanpa beban.
25
Gambar 4.8 Grafik Setpoint 800
9. Data Grafik Setpoint 900
Berdasarkan gambar 4.9 setpoint yang diatur adalah 900, terlihat respon dari nilai
enkoder sudah bagus dan berusaha mendekati setpoint dan mempertahankan nilai yang
mendekati setpoint tersebut. Nilai error juga terlihat stabil karena nilai error dipengaruhi
dari nilai setpoint dan enkoder, karena error didapat dari error = setpoint
–
enkoder. Nilai
dari tachometer masih diatas nilai setpoint namun masih mendekati dari setpoint yang
diatur. Dalam pengujian ini dilakukan dengan keadaan roda tergantung atau tidak
menyentuh tanah dan tanpa beban.
Gambar 4.9 Grafik Setpoint 900
25
Gambar 4.8 Grafik Setpoint 800
9. Data Grafik Setpoint 900
Berdasarkan gambar 4.9 setpoint yang diatur adalah 900, terlihat respon dari nilai
enkoder sudah bagus dan berusaha mendekati setpoint dan mempertahankan nilai yang
mendekati setpoint tersebut. Nilai error juga terlihat stabil karena nilai error dipengaruhi
dari nilai setpoint dan enkoder, karena error didapat dari error = setpoint
–
enkoder. Nilai
dari tachometer masih diatas nilai setpoint namun masih mendekati dari setpoint yang
diatur. Dalam pengujian ini dilakukan dengan keadaan roda tergantung atau tidak
menyentuh tanah dan tanpa beban.
Gambar 4.9 Grafik Setpoint 900
25
Gambar 4.8 Grafik Setpoint 800
9. Data Grafik Setpoint 900
Berdasarkan gambar 4.9 setpoint yang diatur adalah 900, terlihat respon dari nilai
enkoder sudah bagus dan berusaha mendekati setpoint dan mempertahankan nilai yang
mendekati setpoint tersebut. Nilai error juga terlihat stabil karena nilai error dipengaruhi
dari nilai setpoint dan enkoder, karena error didapat dari error = setpoint
–
enkoder. Nilai
dari tachometer masih diatas nilai setpoint namun masih mendekati dari setpoint yang
diatur. Dalam pengujian ini dilakukan dengan keadaan roda tergantung atau tidak
menyentuh tanah dan tanpa beban.
10. Data Grafik Setpoint 1000
Berdasarkan gambar 4.10 setpoint yang diatur adalah 1000, terlihat respon dari
nilai enkoder sudah bagus dan berusaha mendekati setpoint dan mempertahankan nilai
yang mendekati setpoint tersebut. Nilai error juga terlihat stabil karena nilai error
dipengaruhi dari nilai setpoint dan enkoder, karena error didapat dari error = setpoint
–
enkoder. Nilai dari tachometer masih diata nilai setpoint namun masih mendekati dari
setpoint yang diatur. Dalam pengujian ini dilakukan dengan keadaan roda tergantung atau
tidak menyentuh tanah dan tanpa beban.
Gambar 4.10 Grafik Setpoint 1000
11. Data Grafik Setpoint 1100
Berdasarkan gambar 4.11 setpoint yang diatur adalah 1100, terlihat respon dari
nilai enkoder sudah bagus dan berusaha mendekati setpoint dan mempertahankan nilai
yang mendekati setpoint tersebut. Nilai error juga terlihat stabil karena nilai error
dipengaruhi dari nilai setpoint dan enkoder, karena error didapat dari error = setpoint
–
enkoder. Nilai dari tachometer masih diata nilai setpoint namun masih mendekati dari
setpoint yang diatur.
10. Data Grafik Setpoint 1000
Berdasarkan gambar 4.10 setpoint yang diatur adalah 1000, terlihat respon dari
nilai enkoder sudah bagus dan berusaha mendekati setpoint dan mempertahankan nilai
yang mendekati setpoint tersebut. Nilai error juga terlihat stabil karena nilai error
dipengaruhi dari nilai setpoint dan enkoder, karena error didapat dari error = setpoint
–
enkoder. Nilai dari tachometer masih diata nilai setpoint namun masih mendekati dari
setpoint yang diatur. Dalam pengujian ini dilakukan dengan keadaan roda tergantung atau
tidak menyentuh tanah dan tanpa beban.
Gambar 4.10 Grafik Setpoint 1000
11. Data Grafik Setpoint 1100
Berdasarkan gambar 4.11 setpoint yang diatur adalah 1100, terlihat respon dari
nilai enkoder sudah bagus dan berusaha mendekati setpoint dan mempertahankan nilai
yang mendekati setpoint tersebut. Nilai error juga terlihat stabil karena nilai error
dipengaruhi dari nilai setpoint dan enkoder, karena error didapat dari error = setpoint
–
enkoder. Nilai dari tachometer masih diata nilai setpoint namun masih mendekati dari
setpoint yang diatur.
10. Data Grafik Setpoint 1000
Berdasarkan gambar 4.10 setpoint yang diatur adalah 1000, terlihat respon dari
nilai enkoder sudah bagus dan berusaha mendekati setpoint dan mempertahankan nilai
yang mendekati setpoint tersebut. Nilai error juga terlihat stabil karena nilai error
dipengaruhi dari nilai setpoint dan enkoder, karena error didapat dari error = setpoint
–
enkoder. Nilai dari tachometer masih diata nilai setpoint namun masih mendekati dari
setpoint yang diatur. Dalam pengujian ini dilakukan dengan keadaan roda tergantung atau
tidak menyentuh tanah dan tanpa beban.
Gambar 4.10 Grafik Setpoint 1000