PENGATURAN SUHU RUANGAN DARI AC SENTRAL DENGAN
MENERAPKAN KONTROL LOGIKA FUZZY PADA LAB.
DASAR TELEKOMUNIKASI GEDUNG D3 LANTAI 3 PENS – ITS
Satria Fauzana1, Arman Jaya 2, Era Purwanto 3 1
PENS-ITS, Surabaya, 2 PENS-ITS, Surabaya, 3 PENS-ITS, Surabaya Politeknik Elektronika Negeri Surabaya – ITS, Surabaya 60111
Email : satria_fauzana@yahoo.com,
Abstrak
Kebutuhan akan energi listrik merupakan salah satu yang sangat vital di sebuah institusi pendidikan yang besar seperti di Politeknik Elektronika Negeri Surabaya (PENS) dan wajib diterapkan efisiensi energi di dalamnya. Untuk mendapatkan efisiensi energi listrik maka dibuatlah sebuah konsep efisiensi energi mengenai penggunaan suatu beban yang mempunyai dominasi yang cukup tinggi dalam konsumsi energi seperti pada AC sentral yang terdapat di gedung D3 dan salah satunya akan diterapkan di Lab. Dasar Telekomunikasi. Konsep efisiensi energi ini dioperasikan melalui PLC Modicon Quantum Schneider menggunakan Kontrol Logika Fuzzy (KLF) yang menggunakan parameter-parameter input dari sensor motion atau Passive Infra Red (PIR), sensor suhu LM35, dan setting suhu pada HMI (Human Machine Interface). Dengan mengolah parameter-parameter input tersebut menggunakan KLF diprediksikan akan didapatkan penghematan konsumsi daya AC sentral di Lab. Dasar Telekomunikasi sebesar 56.003% untuk pemilihan mode manual (setpoint) dari penggunaan daya sebesar 367.2 kWH menjadi 161.556 kWH per-bulan. Sedangkan untuk pemilihan mode otomatis didapatkan efisiensi energi sebesar 56.649% dari penggunaan energi listrik sebesar 367.2 kWH menjadi 158.184 kWh per-bulan.
Kata kunci: Efisiensi energi, AC sentral, HMI (Human
Machine Interface), KLF (Kontrol Logika Fuzzy), PIR
atau motion, sensor suhu LM35.
1. Pendahuluan
Gedung D3 PENS-ITS yang menghadap ke barat memiliki 6 (enam) laboratorium yang dialiri udara dingin dari AC sentral. Salah satunya adalah laboratorium Dasar Telekomunikasi lantai 3 (tiga) milik Jurusan Teknik Telekomunikasi PENS-ITS.
Namun AC sentral ini jarang digunakan karena dirasa boros dengan daya konsumsi. Selain itu apabila menggunakan AC sentral sering ditemui kendala untuk mengatur suhu ruangan. Hal ini disebabkan karena pengaturan suhunya hanya terpusat pada satu titik saja yaitu pada main panel AC sentral. Sehingga pada
ruangan tidak terdapat setting suhu udara dingin yang diinginkan.
Dengan melihat keadaan tersebut kami menerapkan BAS pada lab. Dasar Telekomunikasi gedung D3 PENS lantai 3 untuk penekanan komsumsi daya pada beban AC sentral dan memberi fasilitas setting suhu diinginkan.
2. Dasar Teori
2.1 PLC (Programmable Logic Kontroller)
PLC yang digunakan adalah PLC Modicon Quantum keluaran produksi dari Scheneider Electric yang dalam pemrogramannya menggunakan software Unity Pro XL dengan struktur bahasa yang digunakan tidak hanya Ladder logic saja, melainkan juga terdapat
structured text (ST). PLC tersebut memiliki masukan
digital 32 IN (4 grup x 8 poin) dan keluaran digital 32 OUT (4 grup x 8 poin) dengan operating voltage (maksimum) 19,2 sampai 30 Vdc. Semua rak yang disediakan bisa dipasangkan dengan I/O module
discrete maupun analog.
2.2. KLF (Kontrol Logika Fuzzy)
Secara umum kontrol logika fuzzy memiliki kemampuan sebgai berikut :
1. Beroperasi tanpa campur tangan manusia secara langsung, tetapi memiliki efektivitas yang sama dengan pengendali manusia. 2. Mampu menangani sistim-sistim yang
kompleks, non-linier dan tak stasioner.
3. Memenuhi spesifikasi operasional dan kriteria kinerja.
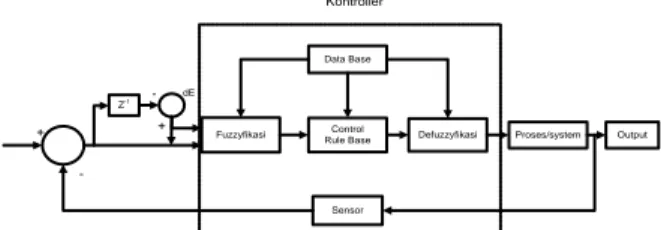
Stuktur dasar sistim pengendali logika fuzzy ditunjukan pada gambar 2.1 berikut:
Sensor Fuzzyfikasi Control
Rule Base Defuzzyfikasi Proses/system Data Base Z-1 + -dE Output Kontroller +
-Gambar 2.1 Stuktur dasar sistim kontrol logika fuzzy
Stuktur kontrol logika fuzzy yang dikembangkan tampak pada gambar 2.2 di bawah. Pada gambar 2.2
tersebut terdapat proses kwantisasi, yaitu proses pengubahan sinyal masukan dalam hal ini error dan
delta error menjadi sinyal yang terkwantisasi (E dan
dE) untuk diproses selanjutnya.
K w a n ti s a s i F u z z y fi k a s i A tu ra n D e fu z z y fi k a s i P ro s e s Error
Gambar 2.2 Struktur pengendali logika fuzzy
3. Rancangan Sistim 3.1. Blok Diagram
Berikut ini adalah blok diagram dari sistim secara keseluruhan:
Gambar 3.1. Blok Diagram Sistim
3.2. Skematik Diagram
Building Automation System (BAS) ini dikontrol
menggunakan metode kontrol logika fuzzy secara keseluruhan sebagai berikut :
Gambar 3.2. Skematik Diagram
Breakdown dari keseluruhan KLF di atas dibagi
menjadi dua, yaitu KLF untuk mode manual (setpoint) dan mode otomatis (adaptif).
Gambar 3.3. Blok Diagram KLF mode manual
Gambar 3.4. Blok Diagram KLF mode otomatis
3.3. Perencanaan Kontrol Logika Fuzzy Pada PLC Dalam prosesnya, ada 5 (lima) tahapan dalam membangunan logika fuzzy, yaitu menentukan crisp input dan crisp output, menentukan fungsi keanggotaan, Fuzzifikasi, Evaluasi aturan dan defuzzyfikasi.
3.3.1 Menentukan crisp input dan crisp output Dalam pembuatan Kontrol Logika Fuzzy ini menggunakan 2 buah input dan 1 buah ouput.
3.3.2 Fungsi keanggotaan
Penerapan pada PLC (Programmable Logic
Controller), tahapan ini berupa deklarasi nilai pada
masing label pada 2 buah input dan 1 buah output, misal untuk deklasi fungsi keanggotaan dari variabel input Error sebagai berikut
largeneger:=-1500.0; largeneger1:=-2000.0; largeneger2:=-1500.0; largeneger3:=-1000.0;
3.3.3 Fuzzifikasi
Ide dasar pembuatan proses fuzzifikasi ini adalah dengan menggunakan rumus persamaan garis lurus yang melewati dua buah titik.
(1)
Penerapannya pada PLC akan menjadi sebagai berikut :
a. Untuk bentuk Trapezoid. {
if error <= largeneger2 then errora:=1.0;
elsif error > largeneger2 and error < largeneger3 then
errora:=( largeneger3- error)/( largeneger3- largeneger2);
elsif error >= largeneger3 then errora:=0.0;
end_if; }
b. Untuk bentuk Triangular.
{ if error <= smallneger1 then
errorc:=0.0;
elsif error >= smallneger3 then errorc:=0.0;
elsif error = smallneger then errorc:=1.0;
elsif error > smallneger1 and error < smallneger2 then
errorc:=( error- smallneger1)/( smallneger2- smallneger1); elsif error > smallneger2 and error < smallneger3 then errorc:=( smallneger3-error)/( smallneger3- smallneger2); end_if; } Pembacaan suhu riil Aktivitas / pergerakan Kontrol Logika Fuzzy Fuzzy Kecepatan Motor AHU
3.3.4 Rule Evaluation
Pada rule evaluation, akan digunakan metode ”AND”. Karena menggunakan metode tersebut maka nilai yang diambil merupakan nilai terkecil (Minimal).
Penerapannya pada PLC akan menjadi sebagai berikut:
if errora>=0.0 and derrora>=0.0 then if errora>derrora then rulemanu1:= derrora; else rulemanu1:= errora; end_if; end_if; 3.3.5 Defuzzifikasi
Pada dasarnya defuzzifikasi ada beberapa metode. Tapi untuk proses BAS ini digunakan metode COG (Center of Gravity).
3.4. Flowchart Sistim
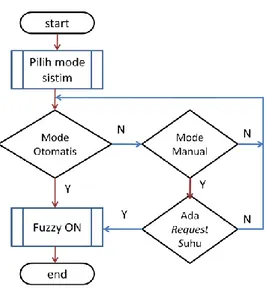
3.4.1. Proses Pemilihan Mode Sistim
Gambar 3.5. Flowchart pemilihan mode sistim
Dalam menjalankan sistim ini terdapat langkah awal yaitu pemilihan proses mode sistim. Terdapat dua mode sistim yaitu, mode manual sistim (dengan setpoint) dan mode otomatis sistim (tanpa setpoint).
3.4.2. Proses Scanning Input
START OTOMATIS SCANING INPUT END SAMPLING INPUT Y N
Gambar 3.6. Flowchart proses scanning input
Proses scanning input akan dimulai saat sistim bekerja dalam keadaan kontrol otomatis. Waktu yang digunakan untuk sampling input selama 60 detik dan akan direset ulang selama 10 detik dan akan secara berulang menjalankan perintah tersebut. Dari sampling input tersebut diproses menggunakan KLF secara terus menerus untuk mencapai kestabilan sistim.
3.4.3. Proses Pengaktifan KLF
Gambar 3.7. Flowchart pemilihan mode sistim
KLF akan mulai bekerja saat salah satu mode sistim dipilih pada panel display HMI dan memenuhi persyaratan ada perkuliahan pada laboratorium tersebut. Apabila salah satu input tidak terpenuhi maka KLF tidak berjalan. Saat sistim otomatis tapi dalam keaadaan tidak ada kuliah maka akan terus terjadi proses scaning
input perkuliahan.
3.5. Penempatan sensor motion atau Passive InfraRed (PIR) dan sensor suhu LM35 di Lab. Dasar Telekomunikasi.
Untuk design penempatan dari sensor motion beserta sensor LM35 untuk di Lab. Dasar Telekomunikasi gambar 3.5 di bawah ini
Gambar 3.8. Penempatan Sensor PIR dan LM35 di Lab. Dasar Telekomunikasi
Ada 2 buah PIR dalam ruangan 9 m x 7.2 m luasnya 64.8 m2. Sedangkan tinggi ruang kelas = 3 m. Dan untuk jangkauan dari PIR itu sendiri sebagai berikut
Gambar 3.9. Jangkauan Sensor PIR
Sudut yang terbentuk dengan jarak 3 meter dari lantai adalah . Untuk mencari jari-jari jangkauan maka :
(1)
Jadi jari-jari jangkauan PIR adalah 1.73 meter, maka luas jangkauan dari PIR adalah
(2)
4. Hasil Penelitian
4.1 Simulasi KLF untuk mode manual.
Untuk pemilihan mode manual digunakan KLF yang inputnya dari sensor LM35 menghasilkan parameter error dan derror.
Gambar 4.1. Uji Simulasi KLF pada Matlab untuk mode manual
Input KLF error sendiri dibagi menjadi 7
membership function yaitu ELN, EMN, ESN, EZ, ESP,
EMP dan ELP yang diartikan selisih nilai setpoint dan pembacaan suhu.
Input KLF derror sendiri dibagi menjadi 7
membership function yaitu DLN, DMN, DSN, DZ,
DSP, DMP dan DLP yang diartikan selisih error sebelumnya dengan error yang baru.
Sedangkan data output kecepatan motor AHU yang terbagi dalam 7 membership function yaitu very
very slow,very slow, slow, medium, fast, very fast, dan very very fast
.
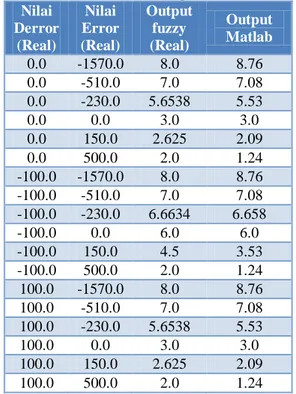
Gambar 4.2 Data Output kecepatan motor AHU Tabel 4.1. Perbandingan Nilai Simulasi dan Implementasi
mode manual (sepoint) Nilai Derror (Real) Nilai Error (Real) Output fuzzy (Real) Output Matlab 0.0 -1570.0 8.0 8.76 0.0 -510.0 7.0 7.08 0.0 -230.0 5.6538 5.53 0.0 0.0 3.0 3.0 0.0 150.0 2.625 2.09 0.0 500.0 2.0 1.24 -100.0 -1570.0 8.0 8.76 -100.0 -510.0 7.0 7.08 -100.0 -230.0 6.6634 6.658 -100.0 0.0 6.0 6.0 -100.0 150.0 4.5 3.53 -100.0 500.0 2.0 1.24 100.0 -1570.0 8.0 8.76 100.0 -510.0 7.0 7.08 100.0 -230.0 5.6538 5.53 100.0 0.0 3.0 3.0 100.0 150.0 2.625 2.09 100.0 500.0 2.0 1.24
4.2. Simulasi KLF untuk mode otomatis (adaptif) Untuk pemilihan mode manual digunakan KLF yang inputnya pembacaan suhu riil dari sensor LM35 dan jumlah aktivitas / pergerakan dari sensor motion (PIR).
Gambar 4.3. Uji Simulasi KLF pada Matlab untuk mode otomatis
Input KLF suhu sendiri dibagi menjadi 7
membership function yaitu veryvery small, verysmall, small, medium, big, very big dan veryverybig yang
diartikan pembacaan suhu dari sensor suhu LM35. Input KLF PIR sendiri dibagi menjadi 7
membership function yaitu very very pasif, very pasif, pasif, sedang, aktif, very aktif dan very very aktif yang
diartikan jumlah pergerakan / aktivitas yang dideteksi oleh sensor motion (PIR).
Sedangkan data output kecepatan motor AHU sama dengan KLF mode manual.
.Berikut ini adalah pengujian output dengan cara merubah-ubah nilai dari kedua input ataupun salah satunya.
Tabel 4.2. Perbandingan Nilai Simulasi dan Implementasi mode otomatis Nilai Suhu (oC) Nilai Motion (Real) Output fuzzy (Real) Output Matlab 20.5 5.0 2.0 1.3 20.5 15.0 2.0 1.3 20.5 25.0 2.75 2.28 20.5 35.0 2.75 2.86 24.5 5.0 2.75 2.28 24.5 15.0 3.75 3.71 24.5 25.0 5.5 5.36 24.5 35.0 5.75 5.71 28.5 5.0 5.5 5.36 28.5 15.0 7.25 8.04 28.5 25.0 7.5 8.22 28.5 35.0 7.75 8.47 30.5 5.0 6.0 6.0 30.5 15.0 8.0 8.7 30.5 25.0 8.0 8.7 30.5 35.0 8.0 8.7
4.3. Konsumsi energi listrik sebelum terpasang BAS
Tabel 4.3. Pengujian motor AHU sebelum terpasang BAS
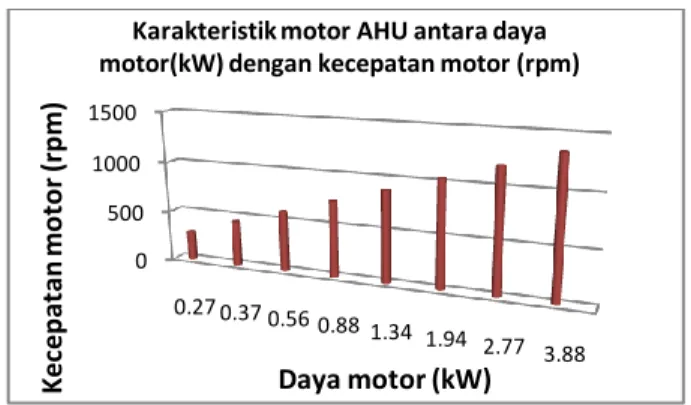
Analog Input (Vdc) Frequency Output (Hz) Motor Current (A) Motor Voltage (V) Motor Speed (rpm) Power output (kWatt) 1 9.7 1.7 42 292 0.27 1.5 14.7 2.2 63 443 0.37 2 19.8 3.0 85 593 0.56 2.5 24.8 3.9 116 742 0.88 3 29.8 4.7 162 892 1.34 3.5 34.7 5.4 216 1042 1.94 4 39.7 6.2 277 1191 2.77 4.5 44.8 7.0 350 1341 3.88
Dari tabel 4.3 di atas menunjukkan pengujian inverter terhadap motor AHU pada AC sentral. Berdasarkan tabel di atas konsumsi daya 3.88 kW pada frekuensi 44.8 Hz inilah yang akan digunakan sebagai asumsi konsumsi daya motor sebelum terpasang BAS.
Gambar 4.4. Karakteristik motor AHU antara daya motor dengan kecepatan motor
Tabel 4.4. Konsumsi daya AC sentral lab. Dasar Telekomunikasi selama 1 minggu sebelum implementasi BAS
Hari Kuliah Jumlah Jam Kuliah (Jam) Konsumsi Daya (KWatt) Energi (KWatt-Hours) Senin 5.0 3.88 19.40 Selasa 5.66 3.88 21.96 Rabu 7.5 3.88 29.10 Kamis 5.5 3.88 21.34 Jumat 0.0 3.88 0.00
Total Konsumsi Energi (KWatt-hours) 91.80
Dari tabel 4.4. di atas menunjukkan total konsumsi energi AC sentral sebelum implementasi BAS selama 1 minggu sebesar 91.8 kWh atau 91800 Wh. Sehingga konsumsi energi listrik yang digunakan AC sentral dalam 1 (satu) bulan dapat ditemukan sebesar 367.2 kWH atau 367200 WH.
3.4. Efisiensi energi untuk mode manual (setpoint)
Tabel 4.5. Prediksi Konsumsi daya AC sentral lab. Dasar Telekomunikasi selama 1 minggu setelah implementasi BAS
untuk mode manual (setpoint)
Hari Kuliah Jumlah Jam Kuliah (Jam) Konsumsi Daya (KWatt) Energi (KWatt-Hours) Senin 5.0 1.707 8.535 Selasa 5.66 1.707 9.662 Rabu 7.5 1.707 12.803 Kamis 5.5 1.707 9.389 Jumat 0.0 1.707 0.0
Total Konsumsi Energi (KWatt-hours) 40.389
Dari tabel 4.5 di atas menunjukkan konsumsi energi motor AHU pada AC sentral selama 1 (satu) minggu (senin-jumat) berdasarkan jadwal kuliah. Pada tabel di atas menunjukkan bahwa selama 1 (satu) minggu konsumsi energi motor AHU pada AC sentral sebesar 40.389 kWH atau 40389 WH. Sehingga konsumsi energi listrik yang digunakan AC sentral dalam 1 (satu) bulan jika menggunakan mode
0 500 1000 1500 0.27 0.37 0.560.88 1.34 1.94 2.77 3.88 Ke ce p at an m o to r (rp m ) Daya motor (kW) Karakteristik motor AHU antara daya motor(kW) dengan kecepatan motor (rpm)
manual (setpoint) dapat ditemukan sebesar 161.556 kWH atau 161556 WH.
Sehingga dapat dihitung energy savings dalam 1 (satu) minggu jika menggunakan mode manual (setpoint) adalah sebesar 51.411 kWH atau 51411 WH. Dan jika dihitung dalam 1 (satu) bulan energy
savings yang didapat adalah sebesar 205.644 kWH
atau 205644 WH.
Berikut ini adalah perhitungan efisiensi energi jika menggunakan mode manual (setpoint) dalam 1 (satu) bulan.
prediksi efisiensi energi (1bulan) = (205.644/367.20) x 100% = 56.003%
3.5. Efisiensi energi untuk mode otomatis
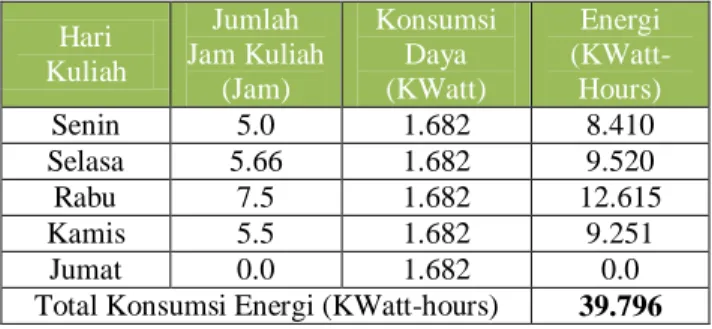
Tabel 4.6. Prediksi Konsumsi daya AC sentral lab. Dasar Telekomunikasi selama 1 minggu setelah implementasi BAS
untuk mode otomatis
Hari Kuliah Jumlah Jam Kuliah (Jam) Konsumsi Daya (KWatt) Energi (KWatt-Hours) Senin 5.0 1.682 8.410 Selasa 5.66 1.682 9.520 Rabu 7.5 1.682 12.615 Kamis 5.5 1.682 9.251 Jumat 0.0 1.682 0.0
Total Konsumsi Energi (KWatt-hours) 39.796
Dari tabel 4.6 di atas menunjukkan konsumsi energi motor AHU pada AC sentral selama 1 (satu) minggu (senin-jumat) berdasarkan jadwal kuliah. Pada tabel di atas menunjukkan bahwa selama 1 (satu) minggu konsumsi energi motor AHU pada AC sentral sebesar 39.796 kWH atau 39796 WH. Sehingga konsumsi energi listrik yang digunakan AC sentral dalam 1 (satu) bulan jika menggunakan mode manual (setpoint) dapat ditemukan sebesar 159.184 kWH atau 159184 WH.
Sehingga dapat dihitung energy saving dalam 1 (satu) minggu jika menggunakan mode otomatis adalah sebesar 52.004 kWH atau 52004 WH. Dan jika dihitung dalam 1 (satu) bulan energy saving yang didapat adalah sebesar 208.016 kWH atau 208016 WH.
Berikut adalah perhitungan efisiensi energi jika menggunakan mode otomatis dalam 1 (satu) bulan.
prediksi efisiensi energi (1bulan) = (208.016/367.20) x 100% = 56.649%
5. Kesimpulan
Dengan penggunaan BAS untuk mengontrol konsumsi energi penggunaan AC sentral untuk mode
manual (setpoint) diprediksi akan didapatkan efisiensi energi sebesar 56.003% dalam 1 (satu) bulan jadwal kuliah dari penggunaan energi sebesar 367.20 kWH menjadi 161.556 kWH. Sedangkan untuk mode otomatis diprediksi akan didapatkan efisiensi energi sebesar 56.649% dalam 1 (satu) bulan jadwal kuliah dari penggunaan energi sebesar 367.20 kWH menjadi 159.184 kWH
6. Daftar Pustaka
[1] Sibigtroth, James M., "Fuzzy Logics", April, 1992, AI Expert.
[2] Bolton, William. Programmable Logic Kontroller (PLC): Sebuah Pengantar, Penerbit
Erlangga, Anggota IKAPI
[3] Dwitya Nugraha, Syechu. “Rancang Bangun
Building Automation Sistim Dengan Menerapkan Kontrol Logika Fuzzy Untuk Pengaturan Kipas Angin Dan Air Conditioner Pada Gedung D4 Lantai 3”, Proyek Akhir
Program D4 Politeknik Elektornika Negeri Surabaya, 2011.
[4] Suhriadi, Akhmad, ”Rancang Bangun Sistim
Efisiensi Energi Listrik di Laboratorium Rangkaian Listrik Gedung D3” , Proyek Akhir
Program D4 Politeknik Elektornika Negeri Surabaya, 2010.
[5] Unity Pro XL 4: Standard Block Library [6] Unity Pro XL Manual Schneider Electric [7] Tutorial Vijeo Designer, Telemecanique
[8] PowerLogic® Series 800 Power Meter PM810, Reference manual
[9]
http://.zenex.pl/SchneiderElectric/MAGELIS/ XBTGT_Tutorial.html