11
BAB III
PERANCANGAN SISTEM
Pada bab ini akan dijelaskan mengenai perancangan dari perangkat keras, serta perangkat lunak dari algoritma robot.
3.1. Gambaran Sistem
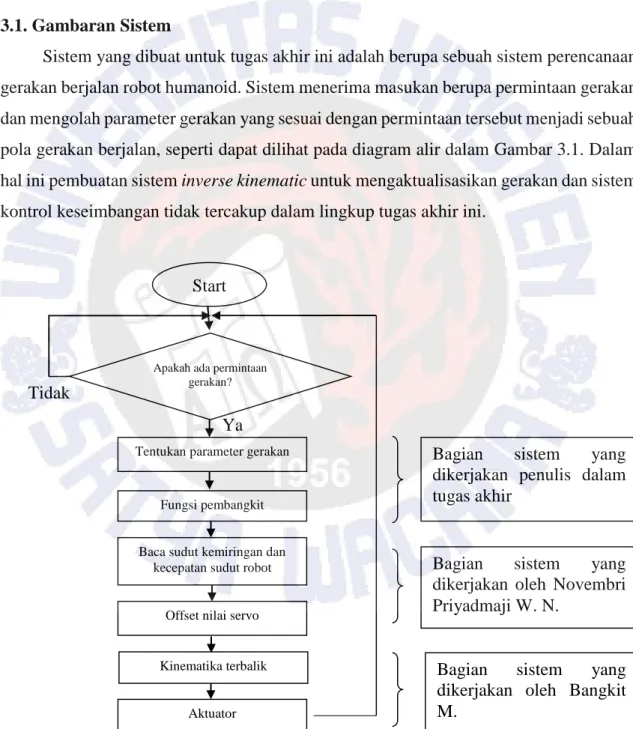
Sistem yang dibuat untuk tugas akhir ini adalah berupa sebuah sistem perencanaan gerakan berjalan robot humanoid. Sistem menerima masukan berupa permintaan gerakan dan mengolah parameter gerakan yang sesuai dengan permintaan tersebut menjadi sebuah pola gerakan berjalan, seperti dapat dilihat pada diagram alir dalam Gambar 3.1. Dalam hal ini pembuatan sistem inverse kinematic untuk mengaktualisasikan gerakan dan sistem kontrol keseimbangan tidak tercakup dalam lingkup tugas akhir ini.
Gambar 3.1 Diagram alir sistem
Bagian sistem yang dikerjakan penulis dalam tugas akhir
Bagian sistem yang dikerjakan oleh Novembri Priyadmaji W. N.
Bagian sistem yang dikerjakan oleh Bangkit M.
Ya Start
Apakah ada permintaan gerakan?
Tentukan parameter gerakan
Fungsi pembangkit
Kinematika terbalik
Tidak
Aktuator Baca sudut kemiringan dan
kecepatan sudut robot
12
3.2. Perancangan Sistem Pembangkit Lintasan
Untuk membangkitkan pola gerakan berjalan robot ditinjau dari ruang kartesian x-y-z, digunakan persamaan pembangkit pola berdasarkan sistem online pattern generation seperti yang diformulasikan oleh Park et al. [3][5] di mana terdapat 3 fungsi pola, yaitu pada arah x, arah y, dan arah z.
3.2.1 Pembangkitan Nilai Koordinat x(t)
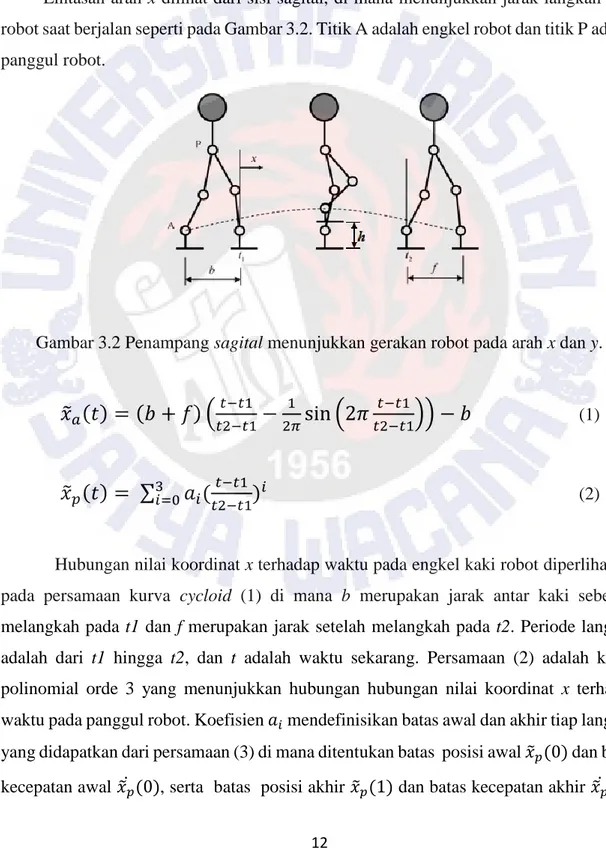
Lintasan arah x dilihat dari sisi sagital, di mana menunjukkan jarak langkah kaki robot saat berjalan seperti pada Gambar 3.2. Titik A adalah engkel robot dan titik P adalah panggul robot.
Gambar 3.2 Penampang sagital menunjukkan gerakan robot pada arah x dan y.
𝑥̃
𝑎(𝑡) = (𝑏 + 𝑓) (
𝑡2−𝑡1𝑡−𝑡1−
1 2𝜋sin (2𝜋
𝑡−𝑡1 𝑡2−𝑡1)) − 𝑏
(1)𝑥̃
𝑝(𝑡) = ∑
3𝑎
𝑖(
𝑡2−𝑡1𝑡−𝑡1)
𝑖 𝑖=0 (2)Hubungan nilai koordinat x terhadap waktu pada engkel kaki robot diperlihatkan pada persamaan kurva cycloid (1) di mana b merupakan jarak antar kaki sebelum melangkah pada t1 dan f merupakan jarak setelah melangkah pada t2. Periode langkah adalah dari t1 hingga t2, dan t adalah waktu sekarang. Persamaan (2) adalah kurva polinomial orde 3 yang menunjukkan hubungan hubungan nilai koordinat x terhadap waktu pada panggul robot. Koefisien 𝑎𝑖 mendefinisikan batas awal dan akhir tiap langkah
yang didapatkan dari persamaan (3) di mana ditentukan batas posisi awal 𝑥̃𝑝(0) dan batas
13
Koefisien αx merupakan faktor bentuk kurva. Kemudian didapatkan nilai 𝑎𝑖 berdasarkan
normalisasi skala waktu seperti pada persamaan (4). Faktor bentuk α menentukan bentuk dari kurva lintasan panggul.
[
𝑥̃
𝑝(0)
𝑥̃
𝑝̇ (0)
𝑥̃
𝑝(1)
𝑥̃
𝑝̇ (1)]
=
[
−𝑏
2
⁄
𝛼
𝑥𝑏
𝑓
2
⁄
𝛼
𝑥𝑓 ]
(3)[
0 0 0 1
0 0 1 0
1 1 1 1
3 2 1 0
] [
𝑎
3𝑎
2𝑎
1𝑎
0] =
[
𝑥̃
𝑝(0)
𝑥̃
𝑝̇ (0)
𝑥̃
𝑝(1)
𝑥̃
𝑝̇ (1)]
(4)3.2.2. Pembangkitan Nilai Koordinat y(t)
Lintasan arah y menunjukkan tinggi engkel saat kaki mengayun. Hubungan nilai koordinat y terhadap waktu pada engkel robot direpresentasikan pada persamaan (5) di mana h merupakan faktor tinggi dari langkah kaki (Gambar 3.2).
𝑦(𝑡) = {2 − [cos (2𝜋
𝑡−𝑡1𝑡2−𝑡1
) + 1]} ℎ 2
⁄
(5) 3.2.3. Pembangkitan Nilai Koordinat z(t)Lintasan arah z pada robot menunjukkan goyangan panggul ke samping saat melangkah, langkah geser ke samping, dan langkah putar robot. Lintasan posisi engkel pada arah z dihasilkan dengan 2 langkah, langkah pertama adalah untuk berubah dari sikap siap menuju sikap terbuka, dan langkah selanjutnya untuk memulihkan dari sikap terbuka kembali ke sikap siap. Sikap terbuka adalah saat single support phase (SSP) dan sikap siap adalah saat double support phase (DSP).
14
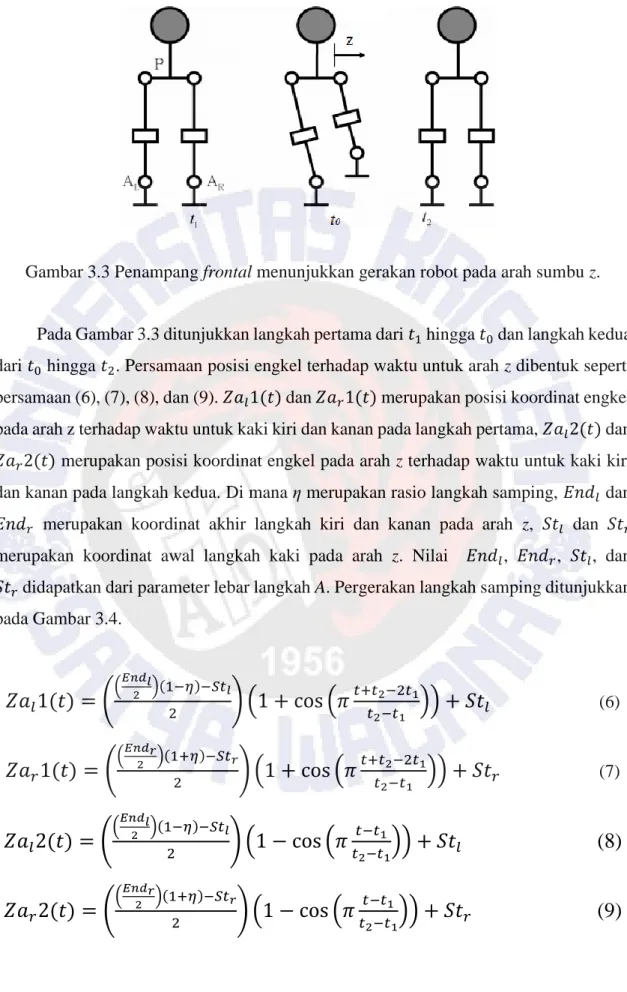
Gambar 3.3 Penampang frontal menunjukkan gerakan robot pada arah sumbu z.
Pada Gambar 3.3 ditunjukkan langkah pertama dari 𝑡1 hingga 𝑡0 dan langkah kedua dari 𝑡0 hingga 𝑡2. Persamaan posisi engkel terhadap waktu untuk arah z dibentuk seperti
persamaan (6), (7), (8), dan (9). 𝑍𝑎𝑙1(𝑡) dan 𝑍𝑎𝑟1(𝑡) merupakan posisi koordinat engkel pada arah z terhadap waktu untuk kaki kiri dan kanan pada langkah pertama, 𝑍𝑎𝑙2(𝑡) dan 𝑍𝑎𝑟2(𝑡) merupakan posisi koordinat engkel pada arah z terhadap waktu untuk kaki kiri
dan kanan pada langkah kedua. Di mana η merupakan rasio langkah samping, 𝐸𝑛𝑑𝑙 dan 𝐸𝑛𝑑𝑟 merupakan koordinat akhir langkah kiri dan kanan pada arah z, 𝑆𝑡𝑙 dan 𝑆𝑡𝑟 merupakan koordinat awal langkah kaki pada arah z. Nilai 𝐸𝑛𝑑𝑙, 𝐸𝑛𝑑𝑟, 𝑆𝑡𝑙, dan
𝑆𝑡𝑟 didapatkan dari parameter lebar langkah A. Pergerakan langkah samping ditunjukkan pada Gambar 3.4.
𝑍𝑎
𝑙1(𝑡) = (
(𝐸𝑛𝑑𝑙2 )(1−𝜂)−𝑆𝑡𝑙 2) (1 + cos (𝜋
𝑡+𝑡2−2𝑡1 𝑡2−𝑡1)) + 𝑆𝑡
𝑙(6)
𝑍𝑎
𝑟1(𝑡) = (
(𝐸𝑛𝑑𝑟2 )(1+𝜂)−𝑆𝑡𝑟 2) (1 + cos (𝜋
𝑡+𝑡2−2𝑡1 𝑡2−𝑡1)) + 𝑆𝑡
𝑟 (7)𝑍𝑎
𝑙2(𝑡) = (
(𝐸𝑛𝑑𝑙2 )(1−𝜂)−𝑆𝑡𝑙 2) (1 − cos (𝜋
𝑡−𝑡1 𝑡2−𝑡1)) + 𝑆𝑡
𝑙(8)
𝑍𝑎
𝑟2(𝑡) = (
(𝐸𝑛𝑑𝑟2 )(1+𝜂)−𝑆𝑡𝑟 2) (1 − cos (𝜋
𝑡−𝑡1 𝑡2−𝑡1)) + 𝑆𝑡
𝑟(9)
15
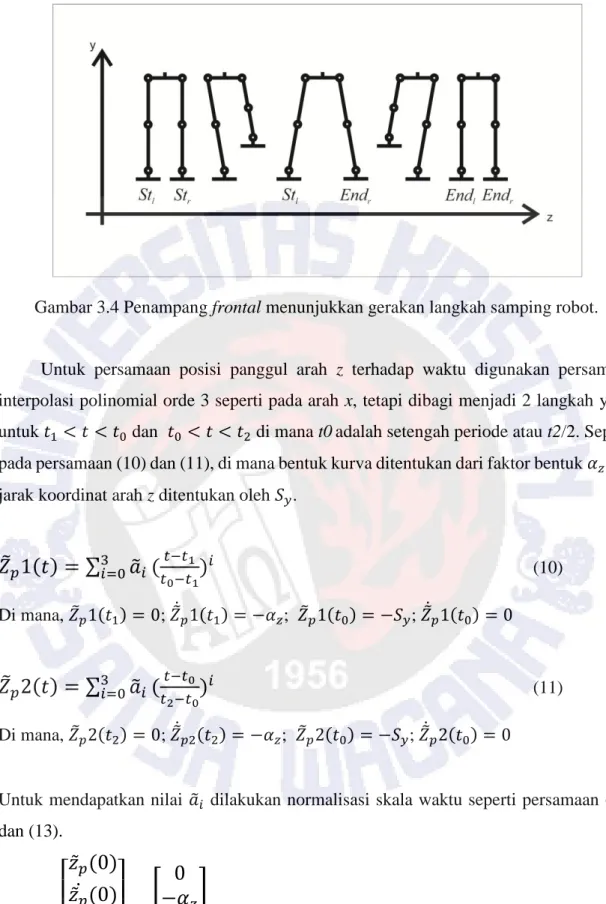
Gambar 3.4 Penampang frontal menunjukkan gerakan langkah samping robot.
Untuk persamaan posisi panggul arah z terhadap waktu digunakan persamaan interpolasi polinomial orde 3 seperti pada arah x, tetapi dibagi menjadi 2 langkah yaitu untuk 𝑡1 < 𝑡 < 𝑡0 dan 𝑡0 < 𝑡 < 𝑡2 di mana t0adalah setengah periode atau t2/2. Seperti pada persamaan (10) dan (11), di mana bentuk kurva ditentukan dari faktor bentuk 𝛼𝑧 dan
jarak koordinat arah z ditentukan oleh 𝑆𝑦.
𝑍̃
𝑝1(𝑡) = ∑
3𝑎̃
𝑖 𝑖=0(
𝑡𝑡−𝑡1 0−𝑡1)
𝑖 (10) Di mana, 𝑍̃𝑝1(𝑡1) = 0; 𝑍̃̇𝑝1(𝑡1) = −𝛼𝑧; 𝑍̃𝑝1(𝑡0) = −𝑆𝑦; 𝑍̃̇𝑝1(𝑡0) = 0𝑍̃
𝑝2(𝑡) = ∑
3𝑎̃
𝑖 𝑖=0(
𝑡𝑡−𝑡0 2−𝑡0)
𝑖 (11) Di mana, 𝑍̃𝑝2(𝑡2) = 0; 𝑍̃̇𝑝2(𝑡2) = −𝛼𝑧; 𝑍̃𝑝2(𝑡0) = −𝑆𝑦; 𝑍̃̇𝑝2(𝑡0) = 0Untuk mendapatkan nilai 𝑎̃𝑖 dilakukan normalisasi skala waktu seperti persamaan (12) dan (13).
[
𝑧̃
𝑝(0)
𝑧̃
𝑝̇ (0)
𝑧̃
𝑝(1)
𝑧̃
𝑝̇ (1)]
= [
0
−𝛼
𝑧−𝑆
𝑦0
]
(12)16
[
0 0 0 1
0 0 1 0
1 1 1 1
3 2 1 0
] [
𝑎
3𝑎
2𝑎
1𝑎
0] =
[
𝑧̃
𝑝(0)
𝑧̃
𝑝̇ (0)
𝑧
𝑝(1)
𝑧
𝑝̇ (1)]
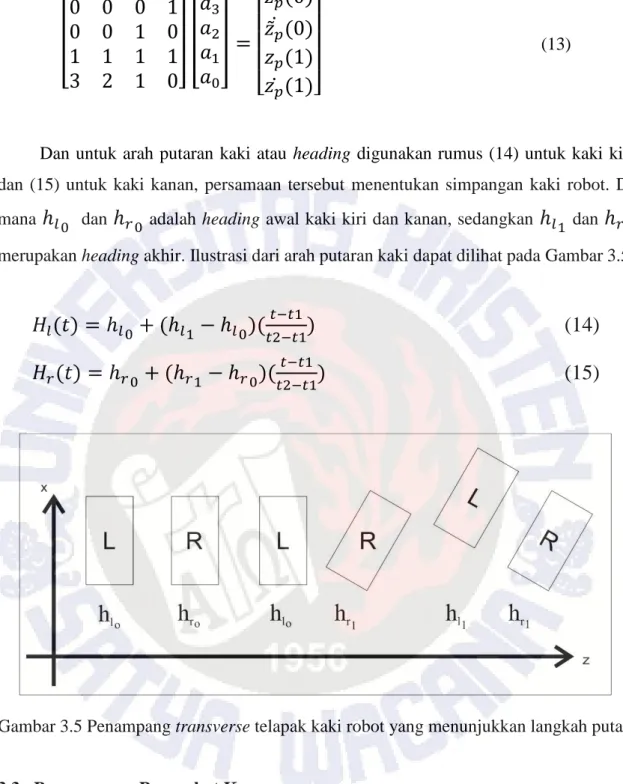
(13)Dan untuk arah putaran kaki atau heading digunakan rumus (14) untuk kaki kiri dan (15) untuk kaki kanan, persamaan tersebut menentukan simpangan kaki robot. Di mana
ℎ
𝑙0 danℎ
𝑟0 adalah heading awal kaki kiri dan kanan, sedangkanℎ
𝑙1 danℎ
𝑟1 merupakan heading akhir. Ilustrasi dari arah putaran kaki dapat dilihat pada Gambar 3.5.𝐻
𝑙(𝑡) = ℎ
𝑙0+ (ℎ
𝑙1− ℎ
𝑙0)(
𝑡−𝑡1𝑡2−𝑡1
)
(14)
𝐻
𝑟(𝑡) = ℎ
𝑟0+ (ℎ
𝑟1− ℎ
𝑟0)(
𝑡−𝑡1𝑡2−𝑡1
)
(15)
Gambar 3.5 Penampang transverse telapak kaki robot yang menunjukkan langkah putar.
3.3. Perancangan Perangkat Keras
Perangkat keras yang telah direalisasikan yaitu modifikasi terhadap kit robot bioloid GP yang sebagian besar rangka robot diganti menggunakan desain rangka dari robot Darwin-OP seperti pada Gambar 3.6 untuk mengakomodasi penggunaan servo MX-28 yang lebih kuat.
Robot memiliki tinggi total 49 cm dan memiliki 20 derajat kebebasan dengan perincian 2 servo kepala, 6 servo tangan, dan 12 servo kaki. Kontroler utama berupa
17
Odroid XU-4 berada di dalam torso robot. Akses servo dilakukan secara langsung melalui usb to serial FTDI sehingga tidak memerlukan adanya kontroler sekunder.
Gambar 3.6 Desain robot Bioloid-GP yang dimodifikasi.
3.4. Perancangan Perangkat Lunak
Dalam tugas akhir ini dibuat sebuah sistem perencanaan gerakan berjalan robot yang merupakan bagian dari sebuah sistem berjalan robot yang mencakup 2 bagian yaitu pembangkitan lintasan atau trayektori engkel dan panggul dan pengaturan pola langkah berjalan.
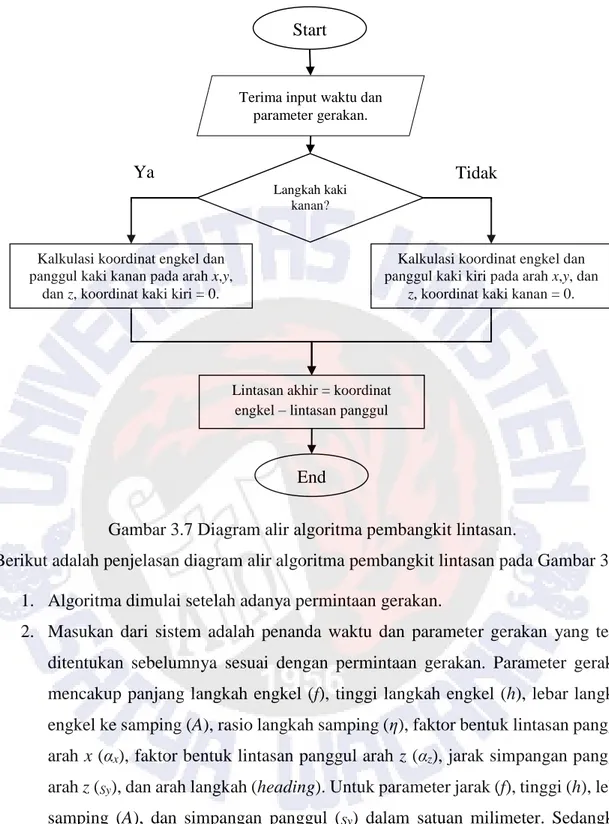
Pada Gambar 3.7 ditunjukkan diagram alir untuk pembangkit lintasan pada engkel dan panggul di mana parameter gerakan yang telah ditentukan diolah melalui rumus lintasan yang ada untuk menghasilkan kurva lintasan langkah robot. Hasil akhir berupa koordinat titik x, y, dan z untuk kaki kiri dan kanan robot yang merupakan hasil selisih dari koordinat engkel dan panggul. Perhitungan selisih dilakukan karena koordinat yang digunakan untuk sistem inverse kinematic merupakan koordinat dari satu titik end effector.
18
Gambar 3.7 Diagram alir algoritma pembangkit lintasan.
Berikut adalah penjelasan diagram alir algoritma pembangkit lintasan pada Gambar 3.7: 1. Algoritma dimulai setelah adanya permintaan gerakan.
2. Masukan dari sistem adalah penanda waktu dan parameter gerakan yang telah ditentukan sebelumnya sesuai dengan permintaan gerakan. Parameter gerakan mencakup panjang langkah engkel (f), tinggi langkah engkel (h), lebar langkah engkel ke samping (A), rasio langkah samping (η), faktor bentuk lintasan panggul arah x (αx), faktor bentuk lintasan panggul arah z (αz), jarak simpangan panggul
arah z (Sy), dan arah langkah (heading). Untuk parameter jarak (f), tinggi (h), lebar
samping (A), dan simpangan panggul (Sy) dalam satuan milimeter. Sedangkan
heading dalam derajat.
3. Tentukan apakah kaki yang akan melangkah adalah kaki kanan atau kaki kiri. 4. Bila yang melangkah adalah kaki kanan, maka dikalkulasikan koordinat x,y, dan
z untuk kaki kanan. Kaki kiri tetap pada posisi sebelumnya.
5. Bila yang melangkah adalah kaki kiri, maka dikalkulasikan koordinat x,y, dan z untuk kaki kiri. Kaki kanan tetap pada posisi sebelumnya.
Terima input waktu dan parameter gerakan.
Start
Langkah kaki kanan?
Kalkulasi koordinat engkel dan panggul kaki kanan pada arah x,y,
dan z, koordinat kaki kiri = 0.
Kalkulasi koordinat engkel dan panggul kaki kiri pada arah x,y, dan
z, koordinat kaki kanan = 0.
Lintasan akhir = koordinat engkel – lintasan panggul
End
19
6. Dilakukan perhitungan selisih antara koordinat engkel dengan koordinat panggul. 7. Hasil perhitungan selisih merupakan koordinat pembentuk lintasan yang dihasilkan untuk gerakan berjalan, dan direalisasikan menggunakan inverse kinematic.
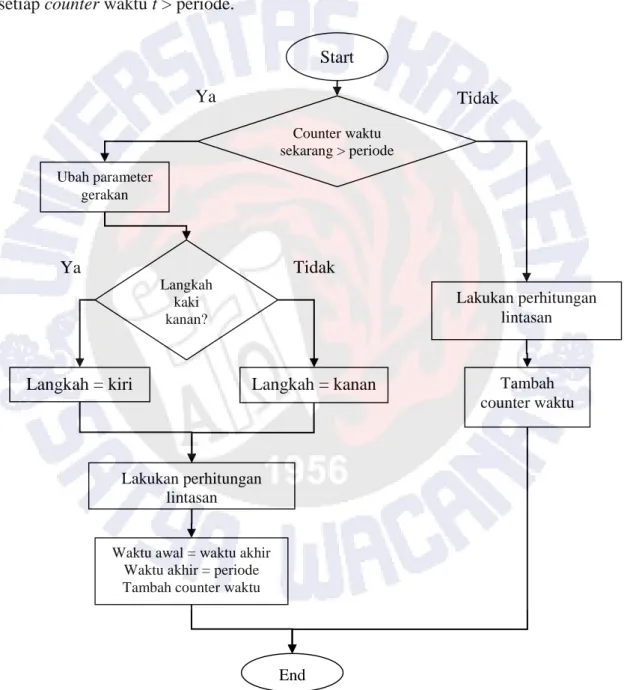
Pada Gambar 3.8 ditunjukkan diagram alir untuk algoritma pengaturan pergantian langkah kaki, di mana perubahan parameter gerakan dan perubahan langkah dilakukan setiap counter waktu t > periode.
Gambar 3.8 Diagram alir algoritma pergantian langkah. Start Counter waktu sekarang > periode Ubah parameter gerakan Lakukan perhitungan lintasan End Langkah kaki kanan?
Langkah = kiri Langkah = kanan
Lakukan perhitungan lintasan
Waktu awal = waktu akhir Waktu akhir = periode Tambah counter waktu
Tambah counter waktu Ya
Ya Tidak
20
Berikut adalah penjelasan diagram alir algoritma pembangkit pola langkah berjalan pada Gambar 3.8:
1. Awal algoritma dimulai dengan menentukan apakah penanda/counter waktu saat ini telah melebihi periode atau tidak.
2. Bila waktu belum melebihi periode yang ditentukan, maka dilakukan perhitungan lintasan dengan sistem pembangkit lintasan pada Gambar 3.7.
3. Setelah itu counter waku t ditambah satu atau diincrement. Counter waktu (t) adalah counter yang berjalan selama satu kali perulangan program dan bukan waktu dalam satuan detik.
4. Ketika waktu telah melebihi periode, maka dilakukan penentuan ulang parameter gerakan.
5. Lalu ditentukan apakah langkah sebelumnya adalah langkah kaki kanan atau langkah kaki kiri. Kemudian penanda langkah kaki dirubah untuk melanjutkan ke langkah kaki berikutnya.
6. Kemudian dilakukan perhitungan lintasan menggunakan algoritma pembangkit lintasan seperti Gambar 3.7.
7. Setelah itu dilakukan pengaturan counter waktu, di mana waktu awal (t1) selanjutnya adalah waktu akhir (t2) sebeumnya, dan waktu akhir (t2) ditambah dengan periode. Sedangkan counter waktu sekarang (t) ditambah satu atau diincrement.